Introduction To Robotics (Kinematics, Dynamics, and Design)
|
|
|
- Berenice Wade
- 5 years ago
- Views:
Transcription


1 Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN Homepage:



2 KUKA Robots Videos
3 Foundations of Robotics Robotics Fundamentals Mechanical Manipulation Mechanics Mechanical Design Direct Kinematics Inverse Kinematics Workspace/Trajectory Planning Jacobians/Dynamics Control Theory Computer Science Locomotion (Mobile Robots) Computer Vision Artificial Intelligence
4 Important Definitions & Terminologies Android: A robot which resembles a human in physical appearance. Artificial Intelligence: The ability of a machine to respond to a new situation and to solve problems without human interference. (To learn from experience). Manipulation: Grasping, releasing, moving, transporting, or otherwise handling an object. Manipulator: A mechanism usually with several degreesof-freedom which is designed for manipulation. Master/Slave Manipulator: A type of teleoperator consisting of a master arm held, moved, and positioned by a person, and a slave arm which simultaneously duplicates the operators motions (with a scale factor).
5 Important Definitions & Terminologies Prosthetic Robot: A controlled mechanical device connected to the human body which provides a substitute for human arms or legs when their function is lost. Intelligent/Adaptive Robot: A category of robots that have sensory perception, making them capable of performing complex tasks which vary from cycle to cycle. (Automatically adjusts its task to the changing conditions in the environment). End-Effector/Gripper: A device connected to the end of a manipulator by which objects can be clamped, grabbed, or otherwise secured for movement. Mobile Robot: A robot mounted on a movable platform (base). Payload: The maximum weight that can be handled by a robot without failure. Actuator: An electrical, hydraulic, or pneumatic driver, such as a cylinder or electric motor, which delivers power for robot motion.
6 Assembly and Manipulation at Different Scales Assembly scale Mesoscale Microscale Nanoscale Attribute Positioning Easy Difficult Very difficult Velocity Cm/s or m/s are not unusual Slow ( m/s), or (mm/s), vibration suppression Force Sensing and Easy / Necessary to Difficult, The range of forces to be Control avoid part damage and sensed could be as low as N. improve manipulability. Dominant forces Gravity, Friction Friction, Surface forces (stiction, electrostatic, Van der Waals) Throughput Serial assembly Serial assembly is usually not provides adequate sufficient. Parallel manipulation throughput. methods are preferred. Gripper Mechanical, many examples, RCC, Utah/MIT hand, etc. Micromechanical, gripper-free manipulation preferred. Fixturing Mechanical Micromechanical fixturing must be used Compliance Gripper compliance is not necessary if force is measured. Gripper compliance is usually necessary. Very slow Nm/s, or m/s Difficult, AFM (atomic force microscope) is used to measure force. Molecular/Atomic forces Parallel manipulation methods, or self-assembly are necessary. Other, optical, proximity force, etc. Chemical Mechanical compliance does not apply. Vision Easy Difficult (expensive optics) Impossible in visible wavelengths.
7 Wrist and End Effector Wrist: the joints between the arm and the end effector. Typically, the arm controls the position of the end-effector, and the wrist controls the orientation.
8 3 DOF Wrist A typical wrist would have 3 DOF described as roll, pitch and yaw. Roll - rotation around the arm axis Pitch - up and down movement (assuming the roll is in its centre position) Yaw - right to left rotation (assuming the roll is in its centre position)

")
9 End Effector The device on the end of the arm, attached via the wrist, that performs the task, such as: Grippers - Use to hold and move objects Tools - Used to perform work on a part, not just to pick it up. A tool could be held by a gripper, making the system more flexible (i.e. welding gun, painting gun)
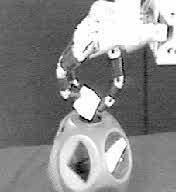
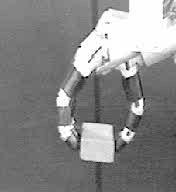
10 Robot Gripper/End Effector
11 Robot Gripper/End-Effector

12 Robot Grippers/End Effectors
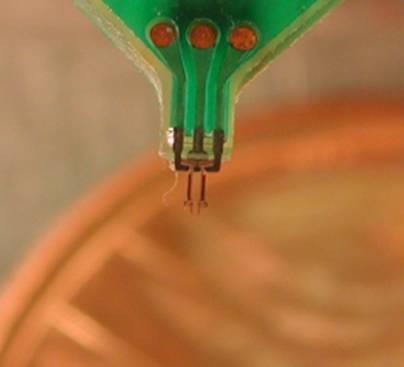
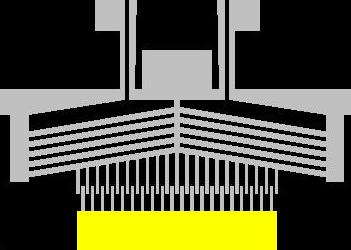
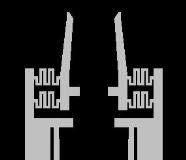
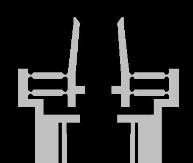
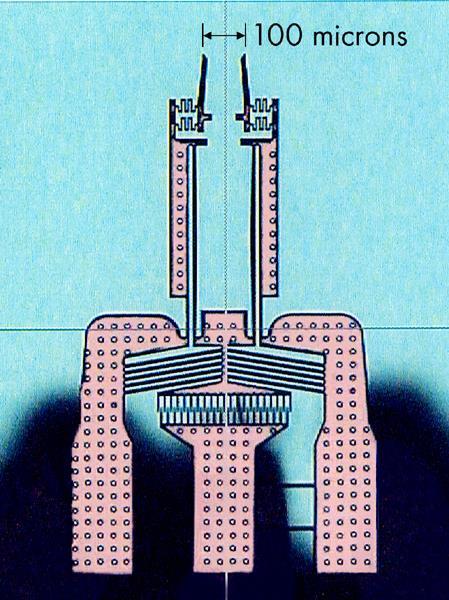
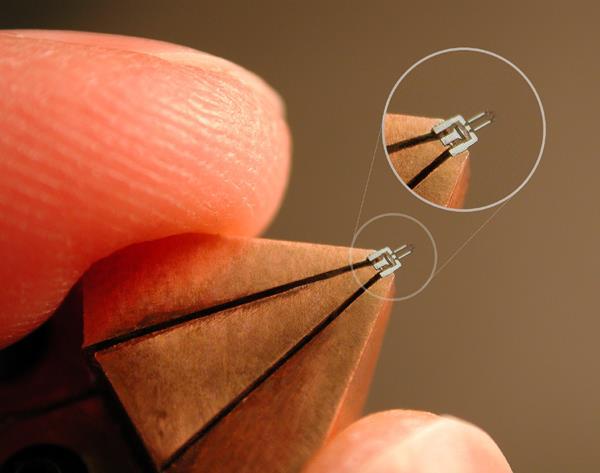
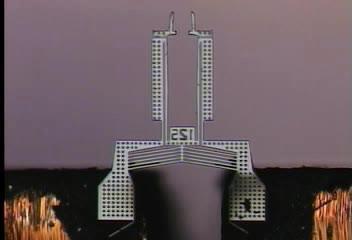
13 Micro-Grippers for Micro-Assembly Capacitive force sensor Gripper tips
14 Accuracy, Resolution, and Repeatability Accuracy: The difference between the point that a robot is trying to achieve and the actual resultant position ½ Res., depends on backlash in gears and elastic deformations in links. Resolution: The smallest increment of motion or distance that can be detected or controlled by the control system of a mechanism/robot. Repeatability: The ability of a system or mechanism to repeat the same motion when presented with the same control signals. The cycle-to-cycle error of a system when trying to perform a specific task. (The precision of a robotic arm in returning to a previously taught position). Resolution ( 0.1 cm) Target Adjacent Tool Positions Accuracy (0.05 cm) Sharif University of Technology - CEDRA


15 Robotics Group: Los Alamos National Laboratory

")
16 Robotics Accuracy and Repeatability (Drift) Measurement and Analysis
17 )مفصل( Joints A joint is the connection between two or more links at their nodes. It constrains the motions of the connected links. A joint can be classified as: One-DOF Two-DOF Three-DOF


18 Revolute joint Imposes a rotational motion One-DOF Joint Symbol R

19 One-DOF Joint Prismatic joint Imposes a translational motion Symbol: P

20 Universal joint Two-DOF Joint Symbol U

21 Cylindrical joint Two-DOF Joint Symbol C

22 Three DOF Joint Ball-and-socket (spherical joint) Symbol S
23 Manipulators Cartesian: PPP Cylindrical: RPP Spherical: RRP Articulated: RRR RRP (Selective Compliance Assembly Robot Arm) Hand coordinate: n: normal vector; s: sliding vector; a: approach vector, normal to the tool mounting plate
24 Configuration A configuration of the manipulator is a complete specification of the location of every point on the manipulator. If you know the values for the joint variable (joint angle for revolute joints or joint offset for prismatic joints), it is straightforward to infer the position of any point on the manipulator. A configuration is represented by a set of values for the joint variable
25 Automation: Technology concerned with the use of mechanical, electronic, and computer-based systems in the operation and control of production. (The technique of making a process automatic or self-controlling). Fixed (Hard) Automation: Specialized machines are designed for highvolume production of parts (i.e. mechanical, electrical, etc.). Can not be adapted (i.e. programmed) to perform variable type work. (Efficient only when we have mass production > 10000). Programmable Automation: The production volume is rather low (<1000), and various parts are needed to be produced. Hence, specialized devices are designed to be flexible and adaptable to variations in production. Parts are produced in a batch (group), and when the batch is completed, the system is reprogrammed to produce the next batch. Robots are occasionally used in the production of parts. Flexible (Soft) Automation: When the production volume is medium (1000 to 10000). Sometimes robots are applied for spot welding, spray painting, material handling, and component assembly. Variation of parts/products is more limited than the programmable automation.

26 Processing Layout of an Automatic Machine for Manufacturing a Chain
27 Every instrument used by us can be described in a general form by an Energy Source, a Control Unit, and the Tool that are connected in some way. Energy Control Tool
28 Layout of a Tracing System (i.e. key copy instrument)
29 Recent Major Development: Microsoft Introduces Robotics Studio What is Microsoft Robotics Studio? A window-based environment that is used to create robotics application What does Microsoft Robotics Studio do? Consider Robotics Application where we have several sensory inputs and needed to be processed to command Actuators output Inputs Actuators Multiple Sensory Inputs Orchestrator Microsoft Robotics Studio provide a programmatic way to create an orchestrator that manage robotics applications ( Service ) Multiple Actuator Outputs Orchestration: The task of consuming sensory input from a variety of sources and as a result manipulating a set of actuators to respond to the sensory input.
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Module 1 : Introduction to robotics. Lecture 3 : Industrial Manipulators & AGVs. Objectives. History of robots : Main bodies and wrists
 Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
Module 1 : Introduction to robotics Lecture 3 : Industrial Manipulators & AGVs Objectives In this course you will learn the following History of development of robots. Main body types of manipulators with
EEE 187: Robotics Summary 2
 1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
1 EEE 187: Robotics Summary 2 09/05/2017 Robotic system components A robotic system has three major components: Actuators: the muscles of the robot Sensors: provide information about the environment and
Industrial Robots : Manipulators, Kinematics, Dynamics
 Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Industrial Robots : Manipulators, Kinematics, Dynamics z z y x z y x z y y x x In Industrial terms Robot Manipulators The study of robot manipulators involves dealing with the positions and orientations
Ch 8 Industrial Robotics
 Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Ch 8 Industrial Robotics Sections: 1. Robot Anatomy and Related Attributes 2. Robot Control Systems 3. End Effectors 4. Sensors in Robotics 5. Industrial Robot Applications 6. Robot Programming 7. Robot
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
 Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Mechanical structure of a robot=skeleton of human body Study of structure of a robot=physical structure of the manipulator structure
 UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
UNIT I FUNDAMENTALS OF ROBOT Part A 1. Define Robot. An industrial robot is a re-programmable, multifunctional manipulator designed to move materials, parts, tools, or specialized devices through variable
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Kinematic chains Readings & prerequisites From the MSMS course one shall already be familiar with Reference systems and transformations Vectors
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 6: Geometrical configurations Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 6: Geometrical configurations Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN
Structural Configurations of Manipulators
 Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
Structural Configurations of Manipulators 1 In this homework, I have given information about the basic structural configurations of the manipulators with the concerned illustrations. 1) The Manipulator
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
MDP646: ROBOTICS ENGINEERING. Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt. Prof. Said M.
 MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MDP646: ROBOTICS ENGINEERING Mechanical Design & Production Department Faculty of Engineering Cairo University Egypt Prof. Said M. Megahed APPENDIX A: PROBLEM SETS AND PROJECTS Problem Set # Due 3 rd week
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Kinematics - Introduction. Robotics. Kinematics - Introduction. Vladimír Smutný
 Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Kinematics - Introduction Robotics Kinematics - Introduction Vladimír Smutný Center for Machine Perception Czech Institute for Informatics, Robotics, and Cybernetics (CIIRC) Czech Technical University
Robotics. SAAST Robotics Robot Arms
 SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
SAAST Robotics 008 Robot Arms Vijay Kumar Professor of Mechanical Engineering and Applied Mechanics and Professor of Computer and Information Science University of Pennsylvania Topics Types of robot arms
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017
 Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Articulated Robots! Robert Stengel! Robotics and Intelligent Systems! MAE 345, Princeton University, 2017 Robot configurations Joints and links Joint-link-joint transformations! Denavit-Hartenberg representation
Robotics kinematics and Dynamics
 Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Robotics kinematics and Dynamics C. Sivakumar Assistant Professor Department of Mechanical Engineering BSA Crescent Institute of Science and Technology 1 Robot kinematics KINEMATICS the analytical study
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm
 Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Inverse Kinematics Analysis for Manipulator Robot With Wrist Offset Based On the Closed-Form Algorithm Mohammed Z. Al-Faiz,MIEEE Computer Engineering Dept. Nahrain University Baghdad, Iraq Mohammed S.Saleh
Robotics Configuration of Robot Manipulators
 Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
MEAM 520. Manipulator Kinematics
 MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
MEAM 520 Manipulator Kinematics Katherine J. Kuchenbecker, Ph.D. General Robotics, Automation, Sensing, and Perception Lab (GRASP) MEAM Department, SEAS, University of Pennsylvania Lecture 4: September
EE Kinematics & Inverse Kinematics
 Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Electric Electronic Engineering Bogazici University October 15, 2017 Problem Statement Kinematics: Given c C, find a map f : C W s.t. w = f(c) where w W : Given w W, find a map f 1 : W C s.t. c = f 1
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Robotics. 10/17/2015 (C) 2001, Ernest L. Hall, University of Cincinnati 1
 2001, Ernest L. Hall, University of Cincinnati 1") Robotics 10/17/2015 (C) 2001, Ernest L. Hall, University of Cincinnati 1 Course objective To provide a broad understanding of the use of industrial robots And an experience in specifying, designing and
Robotics 10/17/2015 (C) 2001, Ernest L. Hall, University of Cincinnati 1 Course objective To provide a broad understanding of the use of industrial robots And an experience in specifying, designing and
Prof. Mark Yim University of Pennsylvania
 Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Robotics: Fundamentals Prof. Mark Yim University of Pennsylvania Week 5: Degrees of Freedom 1 The Goal Understanding the position and orientation of robot links. Computing end-effector positions from joint
Rebecca R. Romatoski. B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006
 Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Robotic End Effecter for the Introduction to Robotics Laboratory Robotic Arms by Rebecca R. Romatoski B.S. Mechanical Engineering Massachusetts Institute of Technology, 2006 SUBMITTED TO THE DEPARTMENT
Lecture 18 Kinematic Chains
 CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
CS 598: Topics in AI - Adv. Computational Foundations of Robotics Spring 2017, Rutgers University Lecture 18 Kinematic Chains Instructor: Jingjin Yu Outline What are kinematic chains? C-space for kinematic
This overview summarizes topics described in detail later in this chapter.
 20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
20 Application Environment: Robot Space and Motion Overview This overview summarizes topics described in detail later in this chapter. Describing Space A coordinate system is a way to describe the space
What is a Manipulator? 2007 RoboJackets TE Sessions 10/16/2007. Keys to Understanding Manipulators TE Sessions Manipulators 10/16/07
 2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
2007 TE Sessions Manipulators 10/16/07 www.robojackets.org Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there? What are the different types of joints and linkages
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS
 Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Forward Kinematic Analysis, Simulation & Workspace Tracing of Anthropomorphic Robot Manipulator By Using MSC. ADAMS Amit L Talli 1, B. B. Kotturshettar 2 Asst. Professor, Department of Automation & Robotics
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur
 Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Robotics Prof. Dilip Kumar Pratihar Department of Mechanical Engineering Indian Institute of Technology, Kharagpur Lecture 03 Introduction to Robot and Robotics (Contd.) (Refer Slide Time: 00:34) Now,
Appendix A: Carpal Wrist Prototype
 Appendix A: Carpal Wrist Prototype The theoretical evolution of the Carpal wrist concept has resulted in a complete mathematical model representing the kinematics and dynamics. The validity of the concept
Appendix A: Carpal Wrist Prototype The theoretical evolution of the Carpal wrist concept has resulted in a complete mathematical model representing the kinematics and dynamics. The validity of the concept
Theory of Machines Course # 1
 Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Theory of Machines Course # 1 Ayman Nada Assistant Professor Jazan University, KSA. arobust@tedata.net.eg March 29, 2010 ii Sucess is not coming in a day 1 2 Chapter 1 INTRODUCTION 1.1 Introduction Mechanisms
Investigation and Evaluation of Embedded Controller Nodes of the Robotic Arm for Industrial Automation 1
 Investigation and Evaluation of Embedded Controller Nodes of the Robotic Arm for Industrial Automation 1 IJCTA, 9(12), 2016, pp. 5687-5695 International Science Press Investigation and Evaluation of Embedded
Investigation and Evaluation of Embedded Controller Nodes of the Robotic Arm for Industrial Automation 1 IJCTA, 9(12), 2016, pp. 5687-5695 International Science Press Investigation and Evaluation of Embedded
Spatial R-C-C-R Mechanism for a Single DOF Gripper
 NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
NaCoMM-2009-ASMRL28 Spatial R-C-C-R Mechanism for a Single DOF Gripper Rajeev Lochana C.G * Mechanical Engineering Department Indian Institute of Technology Delhi, New Delhi, India * Email: rajeev@ar-cad.com
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G.
 VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
Reaching and Grasping
 Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
Lecture 14: (06/03/14) Reaching and Grasping Reference Frames Configuration space Reaching Grasping Michael Herrmann michael.herrmann@ed.ac.uk, phone: 0131 6 517177, Informatics Forum 1.42 Robot arms Typically
INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT)
") INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT) International Journal of Design and Manufacturing Technology (IJDMT), ISSN 0976 6995(Print), ISSN 0976 6995 (Print) ISSN 0976 7002 (Online)
INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT) International Journal of Design and Manufacturing Technology (IJDMT), ISSN 0976 6995(Print), ISSN 0976 6995 (Print) ISSN 0976 7002 (Online)
This week. CENG 732 Computer Animation. Warping an Object. Warping an Object. 2D Grid Deformation. Warping an Object.
 CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
CENG 732 Computer Animation Spring 2006-2007 Week 4 Shape Deformation Animating Articulated Structures: Forward Kinematics/Inverse Kinematics This week Shape Deformation FFD: Free Form Deformation Hierarchical
What is an industrial robot?
 What is an industrial robot? A robot is CFIDV 02CFIC CY A kinematic chain A multi-body dynamical system A system with motors and drives A system with digital and analogic sensors An electronic system A
What is an industrial robot? A robot is CFIDV 02CFIC CY A kinematic chain A multi-body dynamical system A system with motors and drives A system with digital and analogic sensors An electronic system A
PPGEE Robot Dynamics I
 PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
PPGEE Electrical Engineering Graduate Program UFMG April 2014 1 Introduction to Robotics 2 3 4 5 What is a Robot? According to RIA Robot Institute of America A Robot is a reprogrammable multifunctional
Cecilia Laschi The BioRobotics Institute Scuola Superiore Sant Anna, Pisa
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Manipulation and Fluid Power. October 07, 2008
 2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble
 Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Design and Analysis of Voice Activated Robotic Arm
 Design and Analysis of Voice Activated Robotic Arm Ajay Aravind S4 MTECH Government College of Engineering, Kannur ajayaravind05@gmail.com Dr. T.D. John PROFESSOR Government Engineering College, Kannur
Design and Analysis of Voice Activated Robotic Arm Ajay Aravind S4 MTECH Government College of Engineering, Kannur ajayaravind05@gmail.com Dr. T.D. John PROFESSOR Government Engineering College, Kannur
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software
 Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Simulation and Modeling of 6-DOF Robot Manipulator Using Matlab Software 1 Thavamani.P, 2 Ramesh.K, 3 Sundari.B 1 M.E Scholar, Applied Electronics, JCET, Dharmapuri, Tamilnadu, India 2 Associate Professor,
Dipartimento di Elettronica Informazione e Bioingegneria Robotics
 Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
Dipartimento di Elettronica Informazione e Bioingegneria Robotics properties and performance measures @ 25 Redundancy first definition McKerrow When a manipulator can reach a specified position with more
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL
 HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
HEXAPODS FOR PRECISION MOTION AND VIBRATION CONTROL Eric H. Anderson, Michael F. Cash, Jonathan L. Hall and Gregory W. Pettit CSA Engineering Inc., Mountain View, CA Introduction Parallel kinematic manipulators
Modelling of mechanical system CREATING OF KINEMATIC CHAINS
 Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
Modelling of mechanical system CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies
SAMPLE STUDY MATERIAL. Mechanical Engineering. Postal Correspondence Course. Theory of Machines. GATE, IES & PSUs
 TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
TOM - ME GATE, IES, PSU 1 SAMPLE STUDY MATERIAL Mechanical Engineering ME Postal Correspondence Course Theory of Machines GATE, IES & PSUs TOM - ME GATE, IES, PSU 2 C O N T E N T TOPIC 1. MACHANISMS AND
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method
 Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
ACE Project Report. December 10, Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University
 ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
ACE Project Report December 10, 2007 Reid Simmons, Sanjiv Singh Robotics Institute Carnegie Mellon University 1. Introduction This report covers the period from September 20, 2007 through December 10,
Chapter 4. Mechanism Design and Analysis
 Chapter 4. Mechanism Design and Analysis All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Chapter 4. Mechanism Design and Analysis All mechanical devices containing moving parts are composed of some type of mechanism. A mechanism is a group of links interacting with each other through joints
Kinematics of Machines. Brown Hills College of Engineering & Technology
 Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Introduction: mechanism and machines, kinematic links, kinematic pairs, kinematic chains, plane and space mechanism, kinematic inversion, equivalent linkages, four link planar mechanisms, mobility and
Inverse Kinematics Software Design and Trajectory Control Programming of SCARA Manipulator robot
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 11, Number 11 (2018), pp. 1759-1779 International Research Publication House http://www.irphouse.com Inverse Kinematics
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Chapter 1 Introduction
 Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
Chapter 1 Introduction Generally all considerations in the force analysis of mechanisms, whether static or dynamic, the links are assumed to be rigid. The complexity of the mathematical analysis of mechanisms
Calibration Procedure For An Industrial Robot
 Calibration Procedure For An Industrial Robot by B. W. Mooring and T. J. Pack Department of Mechanical Engineering Texas A&M University College Station, Texas 77843 Manufacturing Systems Division, IBM
Calibration Procedure For An Industrial Robot by B. W. Mooring and T. J. Pack Department of Mechanical Engineering Texas A&M University College Station, Texas 77843 Manufacturing Systems Division, IBM
Design and Development of Cartesian Robot for Machining with Error Compensation and Chatter Reduction
 International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 4 (2013), pp. 449-454 International Research Publication House http://www.irphouse.com Design and Development
International Journal of Engineering Research and Technology. ISSN 0974-3154 Volume 6, Number 4 (2013), pp. 449-454 International Research Publication House http://www.irphouse.com Design and Development
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Chapter 2 Mechanisms Abstract
 Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Chapter 2 Mechanisms Abstract This chapter begins with a description of the different types of mechanisms that are generally used, especially in industrial robots. The parameters and variables of the mechanisms
Application Note. Fiber Alignment Using The HXP50 Hexapod PROBLEM BACKGROUND
 Fiber Alignment Using The HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Fiber Alignment Using The HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Application Note. Fiber Alignment Using the HXP50 Hexapod PROBLEM BACKGROUND
 Fiber Alignment Using the HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
Fiber Alignment Using the HXP50 Hexapod PROBLEM The production of low-loss interconnections between two or more optical components in a fiber optic assembly can be tedious and time consuming. Interfacing
IVR 10: Effectors and Actuators
 IVR 10: Effectors and Actuators Overview: 12/2/2015 Mechanisms for acting on the world Degrees of freedom and mobility Methods of locomotion: Wheels, legs and beyond Methods of manipulation: Arms, grippers
IVR 10: Effectors and Actuators Overview: 12/2/2015 Mechanisms for acting on the world Degrees of freedom and mobility Methods of locomotion: Wheels, legs and beyond Methods of manipulation: Arms, grippers
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS
 Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Kinematics Fundamentals CREATING OF KINEMATIC CHAINS Mechanism Definitions 1. a system or structure of moving parts that performs some function 2. is each system reciprocally joined moveable bodies the
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Self Assembly of Modular Manipulators with Active and Passive Modules
 Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Lecture VI: Constraints and Controllers. Parts Based on Erin Catto s Box2D Tutorial
 Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
Lecture VI: Constraints and Controllers Parts Based on Erin Catto s Box2D Tutorial Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a
ROBOTICS 01PEEQW. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOTICS 01PEEQW Basilio Bona DAUIN Politecnico di Torino Control Part 4 Other control strategies These slides are devoted to two advanced control approaches, namely Operational space control Interaction
ROBOT SENSORS. 1. Proprioceptors
 ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
ROBOT SENSORS Since the action capability is physically interacting with the environment, two types of sensors have to be used in any robotic system: - proprioceptors for the measurement of the robot s
Dynamic Analysis of a 3DoF Motion Platform Masoomeh Aminzadeh a, Ali Mahmoodi a, Mehdi Sabzehparvar a,b*
 International Journal of Robotics Vol.1 No.1 (2009)/M. Aminzadeh A. Mahmoodi M. Sabzehparvar Dynamic Analysis of a 3DoF Motion Platform Masoomeh Aminzadeh a Ali Mahmoodi a Mehdi Sabzehparvar ab* a-department
International Journal of Robotics Vol.1 No.1 (2009)/M. Aminzadeh A. Mahmoodi M. Sabzehparvar Dynamic Analysis of a 3DoF Motion Platform Masoomeh Aminzadeh a Ali Mahmoodi a Mehdi Sabzehparvar ab* a-department
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 3: Forward and Inverse Kinematics
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
MCE/EEC 647/747: Robot Dynamics and Control Lecture 3: Forward and Inverse Kinematics Denavit-Hartenberg Convention Reading: SHV Chapter 3 Mechanical Engineering Hanz Richter, PhD MCE503 p.1/12 Aims of
θ x Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul
 1 23-Jul Introduction + Representing Position & Orientation & State 2 30-Jul") θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
θ x 2018 School of Information Technology and Electrical Engineering at the University of Queensland Lecture Schedule Week Date Lecture (M: 2:05p-3:50, 50-N202) 1 23-Jul Introduction + Representing Position
1 Trajectories. Class Notes, Trajectory Planning, COMS4733. Figure 1: Robot control system.
 Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
Class Notes, Trajectory Planning, COMS4733 Figure 1: Robot control system. 1 Trajectories Trajectories are characterized by a path which is a space curve of the end effector. We can parameterize this curve
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
Design Contemplation and Modelling of a Bi-Axial Manipulator
 Design Contemplation and Modelling of a Bi-Axial Manipulator Shuprajhaa T t.shuprajhaa94@gmail.com Vaitheeshwari M, mvaithee3795@gmail.com Subasree S subasreesridhar.12@gmail.com Sivakumar S Assistant
Design Contemplation and Modelling of a Bi-Axial Manipulator Shuprajhaa T t.shuprajhaa94@gmail.com Vaitheeshwari M, mvaithee3795@gmail.com Subasree S subasreesridhar.12@gmail.com Sivakumar S Assistant
TABLE OF CONTENTS. Page 2 35
 TABLE OF CONTENTS INTRODUCTION... 3 WARNING SIGNS AND THEIR MEANINGS... 3 1. ABOUT THE PULSE ROBOT... 4 1.1. The hardware and software... 4 1.2. The operating states of the PULSE robot... 5 1.3. Safe operation
TABLE OF CONTENTS INTRODUCTION... 3 WARNING SIGNS AND THEIR MEANINGS... 3 1. ABOUT THE PULSE ROBOT... 4 1.1. The hardware and software... 4 1.2. The operating states of the PULSE robot... 5 1.3. Safe operation
Lecture VI: Constraints and Controllers
 Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
Lecture VI: Constraints and Controllers Motion Constraints In practice, no rigid body is free to move around on its own. Movement is constrained: wheels on a chair human body parts trigger of a gun opening
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
September 20, Chapter 5. Simple Mechanisms. Mohammad Suliman Abuhaiba, Ph.D., PE
 Chapter 5 Simple Mechanisms 1 Mohammad Suliman Abuhaiba, Ph.D., PE 2 Assignment #1 All questions at the end of chapter 1 st Exam: Saturday 29/9/2018 3 Kinematic Link or Element kinematic link (link) or
Chapter 5 Simple Mechanisms 1 Mohammad Suliman Abuhaiba, Ph.D., PE 2 Assignment #1 All questions at the end of chapter 1 st Exam: Saturday 29/9/2018 3 Kinematic Link or Element kinematic link (link) or
Analytical and Applied Kinematics
 Analytical and Applied Kinematics Vito Moreno moreno@engr.uconn.edu 860-614-2365 (cell) http://www.engr.uconn.edu/~moreno Office EB1, hours Thursdays 10:00 to 5:00 1 This course introduces a unified and
Analytical and Applied Kinematics Vito Moreno moreno@engr.uconn.edu 860-614-2365 (cell) http://www.engr.uconn.edu/~moreno Office EB1, hours Thursdays 10:00 to 5:00 1 This course introduces a unified and
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Development of reconfigurable serial manipulators using parameters based modules
 Development of reconfigurable serial manipulators using parameters based modules Satwinder Singh, Atul Aggarwal, Yogesh Singhal, Ekta Singla Abstract The aim of this paper is to present a modular architecture
Development of reconfigurable serial manipulators using parameters based modules Satwinder Singh, Atul Aggarwal, Yogesh Singhal, Ekta Singla Abstract The aim of this paper is to present a modular architecture
MAE 342 Dynamics of Machines. Types of Mechanisms. type and mobility
 MAE 342 Dynamics of Machines Types of Mechanisms Classification of Mechanisms by type and mobility MAE 342 Dynamics of Machines 2 Planar, Spherical and Spatial Mechanisms Planar Mechanisms: all points
MAE 342 Dynamics of Machines Types of Mechanisms Classification of Mechanisms by type and mobility MAE 342 Dynamics of Machines 2 Planar, Spherical and Spatial Mechanisms Planar Mechanisms: all points
TRAINING A ROBOTIC MANIPULATOR
 ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
11. Kinematic models of contact Mechanics of Manipulation
 11. Kinematic models of contact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 11. Mechanics of Manipulation p.1 Lecture 11. Kinematic models
11. Kinematic models of contact Mechanics of Manipulation Matt Mason matt.mason@cs.cmu.edu http://www.cs.cmu.edu/~mason Carnegie Mellon Lecture 11. Mechanics of Manipulation p.1 Lecture 11. Kinematic models
Mechanical Design Challenges for Collaborative Robots
 Motor Technologies Mechanical Design Challenges for Collaborative Robots TN-3301 REV 170526 THE CHALLENGE Robotics and additive manufacturing markets have entered into a new phase of growth. This growth
Motor Technologies Mechanical Design Challenges for Collaborative Robots TN-3301 REV 170526 THE CHALLENGE Robotics and additive manufacturing markets have entered into a new phase of growth. This growth
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
Jane Li. Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute
 Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Jane Li Assistant Professor Mechanical Engineering Department, Robotic Engineering Program Worcester Polytechnic Institute We know how to describe the transformation of a single rigid object w.r.t. a single
Lecture Note 2: Configuration Space
 ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
ECE5463: Introduction to Robotics Lecture Note 2: Configuration Space Prof. Wei Zhang Department of Electrical and Computer Engineering Ohio State University Columbus, Ohio, USA Spring 2018 Lecture 2 (ECE5463
International Journal of Advanced Research in Computer Science and Software Engineering
 Volume 2, Issue 10, October 2012 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Force Closure
Volume 2, Issue 10, October 2012 ISSN: 2277 128X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com Force Closure
On the basis of degree of freedom of the arm and the type of joints used, a robotic arm can have any of the following designs:
 Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing 20 (2018) 400 405 www.elsevier.com/locate/procedia 2nd International Conference on Materials Manufacturing and Design Engineering
Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing 20 (2018) 400 405 www.elsevier.com/locate/procedia 2nd International Conference on Materials Manufacturing and Design Engineering