More Single View Geometry
|
|
|
- Jessica Wood
- 5 years ago
- Views:
Transcription

1 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon : Computational Photography Alexei Efros, CMU, Fall 2007
2 Final Projects Are coming up fast! Undergrads can work in pairs, but project must be bigger. Sample Topics: Full 360 panorama construction (spherical or cylindrical) Render in synthetic object into real scene Automatic Tour into the Picture (can use Pop-up labeling code) Build a virtual CMU campus environment Implement a paper discussed in class (e.g. Video Textures) Come up with art project that uses Comp. Photography Etc. Project proposals due next Tuesday!


3 Pop Quiz: which is 1,2,3-point perspective Image B Image A Image C



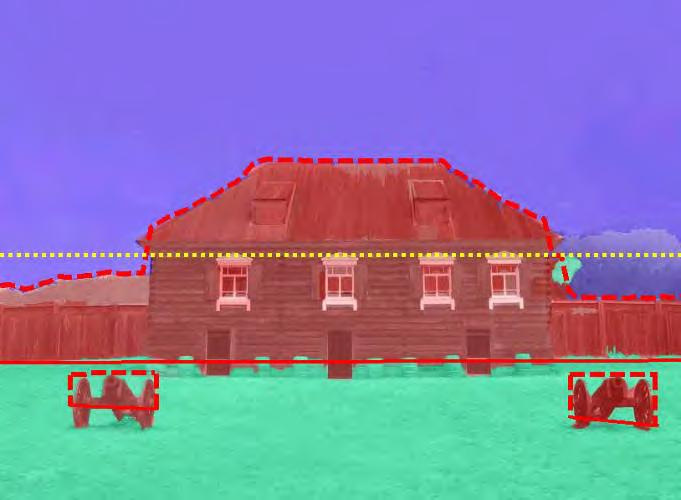
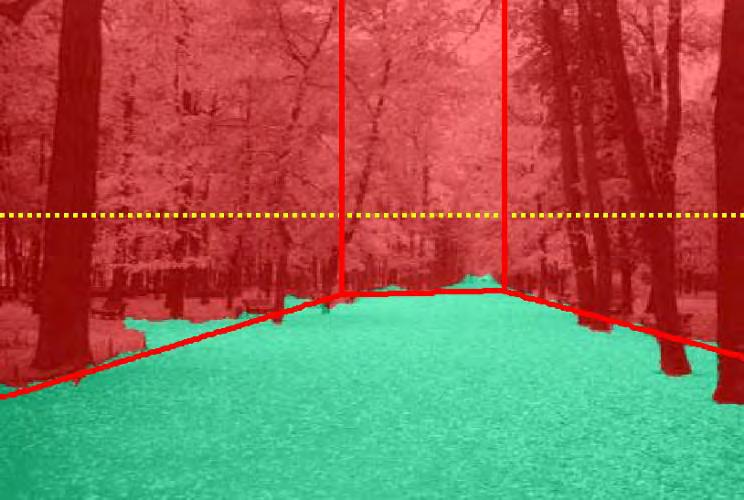
4 Automatic Photo Pop-up Original Image Geometric Labels Fit Segments Cut and Fold Novel View



5 Results Input Image Cut and Fold Automatic Photo Pop-up



6 Results Input Image Cut and Fold Automatic Photo Pop-up




7 Results Input Image Automatic Photo Pop-up



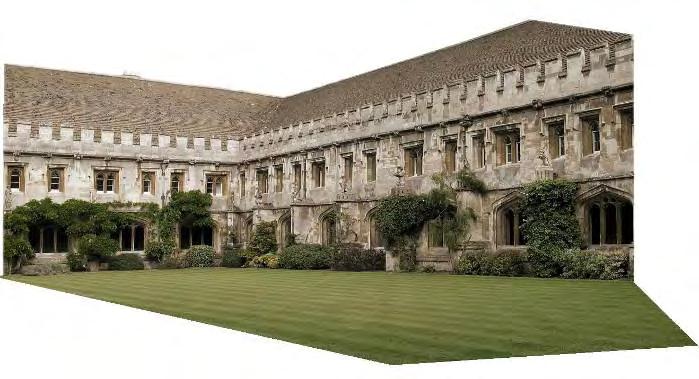


8 Results Input Images Automatic Photo Pop-up




9 Results Input Image Automatic Photo Pop-up
10 How can we model this scene? 1. Find world coordinates (X,Y,Z) for a few points 2. Connect the points with planes to model geometry Texture map the planes
11 Finding world coordinates (X,Y,Z) 1. Define the ground plane (Z=0) 2. Compute points (X,Y,0) on that plane 3. Compute the heights Z of all other points
12 Measurements on planes Approach: unwarp, then measure What kind of warp is this?

 p =")
13 Unwarp ground plane x p p Our old friend the homography Need 4 reference points with world coordinates p = (x,y) p = (X,Y,0)
14 Finding world coordinates (X,Y,Z) 1. Define the ground plane (Z=0) 2. Compute points (X,Y,0) on that plane 3. Compute the heights Z of all other points
15 Comparing heights
16 Perspective cues
17 Perspective cues
18 Comparing heights Vanishing Point
19 Measuring height Camera height
20 Computing vanishing points (from lines) v q 1 q 2 p 2 p 1 Intersect p 1 q 1 with p 2 q 2 Least squares version Better to use more than two lines and compute the closest point of intersection See notes by Bob Collins for one good way of doing this:
 Vanishing point Vanishing")
21 Criminisi 99 Vanishing line Vertical vanishing point (at infinity) Vanishing point Vanishing point
22 Measuring height without a ruler C Z ground plane Compute Z from image measurements Need more than vanishing points to do this
23 Measuring height v z r vanishing line (horizon) v x v t 0 H t R H v y b 0 b
24 Measuring height v z r vanishing line (horizon) t 0 v x t 0 v v y m 0 t 1 b 0 b 1 What if the point on the ground plane b 0 is not known? Here the guy is standing on the box Use one side of the box to help find b 0 as shown above b

25 What if v z is not infinity?
26 The cross ratio A Projective Invariant Something that does not change under projective transformations (including perspective projection) P 1 P 2 P 3 P P P P P P P P P The cross-ratio of 4 collinear points Can permute the point ordering 4! = 24 different orders (but only 6 distinct values) This is the fundamental invariant of projective geometry = 1 i i i i Z Y X P P P P P P P P P
27 v Z r t b t v b r r v b t Z Z image cross ratio Measuring height B (bottom of object) T (top of object) R (reference point) ground plane H C T B R R B T scene cross ratio = 1 Z Y X P = 1 y x p scene points represented as image points as R H = R H = R
28 Measuring height v z r vanishing line (horizon) v x v t 0 H t R H v y b 0 t r b b v v Z Z r t = image cross ratio H R b

29 Measuring heights of people Here we go! cm reference


30 Forensic Science: measuring heights of suspects Vanishing line Reference height Reference height

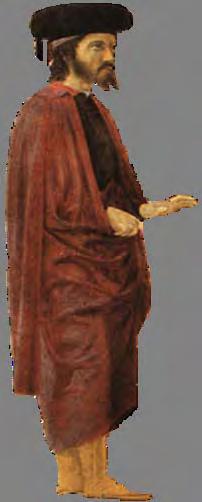
31 Assessing geometric accuracy Are the heights of the 2 groups of people consistent with each other? Flagellation, Piero della Francesca Estimated relative heights


32 Assessing geometric accuracy The Marriage of the Virgin, Raphael Estimated relative heights
33 Criminisi et al., ICCV 99 Complete approach Load in an image Click on lines parallel to X axis repeat for Y, Z axes Compute vanishing points Specify 3D and 2D positions of 4 points on reference plane Compute homography H Specify a reference height Compute 3D positions of several points Create a 3D model from these points Extract texture maps Cut out objects Fill in holes Output a VRML model

34 Interactive silhouette cut-out




35 Occlusion filling Geometric filling by exploiting: symmetries repeated regular patterns Texture synthesis repeated stochastic patterns


36 Complete 3D reconstruction Single View algorithms Single image Planar measurements Height measurements Automatic vanishing point/line computation Interactive segmentation Occlusion filling Object placement in 3D model 3D model

37 Reconstruction from single photographs Reconstruction of the garden Hut from a single image







38 A virtual Microsoft A.Criminisi
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry
 More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
SINGLE VIEW GEOMETRY AND SOME APPLICATIONS
 SINGLE VIEW GEOMERY AND SOME APPLICAIONS hank you for the slides. hey come mostly from the following sources. Marc Pollefeys U. on North Carolina Daniel DeMenthon U. of Maryland Alexei Efros CMU Action
SINGLE VIEW GEOMERY AND SOME APPLICAIONS hank you for the slides. hey come mostly from the following sources. Marc Pollefeys U. on North Carolina Daniel DeMenthon U. of Maryland Alexei Efros CMU Action
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
CS4670/5670: Computer Vision Kavita Bala. Lec 19: Single- view modeling 2
 CS4670/5670: Computer Vision Kavita Bala Lec 19: Single- view modeling 2 Today Vanishing points in images are useful Recover size Camera calibrakon Vanishing points image plane vanishing point V camera
CS4670/5670: Computer Vision Kavita Bala Lec 19: Single- view modeling 2 Today Vanishing points in images are useful Recover size Camera calibrakon Vanishing points image plane vanishing point V camera
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Single-view 3D reasoning
 Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
A simple method for interactive 3D reconstruction and camera calibration from a single view
 A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Perspective projection. A. Mantegna, Martyrdom of St. Christopher, c. 1450
 Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Projective geometry for Computer Vision
 Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
Department of Computer Science and Engineering IIT Delhi NIT, Rourkela March 27, 2010 Overview Pin-hole camera Why projective geometry? Reconstruction Computer vision geometry: main problems Correspondence
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
CEng Computational Vision
 CEng 583 - Computational Vision 2011-2012 Spring Week 4 18 th of March, 2011 Today 3D Vision Binocular (Multi-view) cues: Stereopsis Motion Monocular cues Shading Texture Familiar size etc. "God must
CEng 583 - Computational Vision 2011-2012 Spring Week 4 18 th of March, 2011 Today 3D Vision Binocular (Multi-view) cues: Stereopsis Motion Monocular cues Shading Texture Familiar size etc. "God must
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
Spatial track: range acquisition modeling
 Spatial track: range acquisition modeling Virginio Cantoni Laboratorio di Visione Artificiale Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 The
Spatial track: range acquisition modeling Virginio Cantoni Laboratorio di Visione Artificiale Università di Pavia Via A. Ferrata 1, 27100 Pavia virginio.cantoni@unipv.it http://vision.unipv.it/va 1 The
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
But First: Multi-View Projective Geometry
 View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
View Morphing (Seitz & Dyer, SIGGRAPH 96) Virtual Camera Photograph Morphed View View interpolation (ala McMillan) but no depth no camera information Photograph But First: Multi-View Projective Geometry
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
Visualization 2D-to-3D Photo Rendering for 3D Displays
 Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing Modeling
 Background COS526: Advanced Computer Graphics Tom Funkhouser Fall 2010 Image Processing o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing
Background COS526: Advanced Computer Graphics Tom Funkhouser Fall 2010 Image Processing o Basic signal processing o Filtering, resampling, warping,... Rendering o Polygon rendering pipeline o Ray tracing
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
3D Geometric Computer Vision. Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada
 3D Geometric Computer Vision Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada Multi-view geometry Build 3D models from images Carry out manipulation tasks http://webdocs.cs.ualberta.ca/~vis/ibmr/
3D Geometric Computer Vision Martin Jagersand Univ. Alberta Edmonton, Alberta, Canada Multi-view geometry Build 3D models from images Carry out manipulation tasks http://webdocs.cs.ualberta.ca/~vis/ibmr/
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Feature Matching and RANSAC
 Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Feature Matching and RANSAC Recognising Panoramas. [M. Brown and D. Lowe,ICCV 2003] [Brown, Szeliski, Winder, CVPR 2005] with a lot of slides stolen from Steve Seitz, Rick Szeliski, A. Efros Introduction
Computer Vision CS 776 Fall 2018
 Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
More Mosaic Madness. CS194: Image Manipulation & Computational Photography. Steve Seitz and Rick Szeliski. Jeffrey Martin (jeffrey-martin.
 More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
More Mosaic Madness Jeffrey Martin (jeffrey-martin.com) CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2018 Steve Seitz and Rick
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CS-9645 Introduction to Computer Vision Techniques Winter 2019
 Table of Contents Projective Geometry... 1 Definitions...1 Axioms of Projective Geometry... Ideal Points...3 Geometric Interpretation... 3 Fundamental Transformations of Projective Geometry... 4 The D
Table of Contents Projective Geometry... 1 Definitions...1 Axioms of Projective Geometry... Ideal Points...3 Geometric Interpretation... 3 Fundamental Transformations of Projective Geometry... 4 The D
CMPSCI 670: Computer Vision! Image formation. University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Simple 3D Reconstruction of Single Indoor Image with Perspe
 Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Automatic Image Alignment
 Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Automatic Image Alignment Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2010 Live Homography DEMO Check out panoramio.com
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Real-Time Shadows. Last Time? Schedule. Questions? Today. Why are Shadows Important?
 Last Time? Real-Time Shadows The graphics pipeline Clipping & rasterization of polygons Visibility the depth buffer (z-buffer) Schedule Questions? Quiz 2: Thursday November 2 th, in class (two weeks from
Last Time? Real-Time Shadows The graphics pipeline Clipping & rasterization of polygons Visibility the depth buffer (z-buffer) Schedule Questions? Quiz 2: Thursday November 2 th, in class (two weeks from
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski
 with a lot of slides stolen from Steve Seitz and Rick Szeliski") Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
Automatic Image Alignment (direct) with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Today Go over Midterm Go over Project #3
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Uncalibrated 3D metric reconstruction and flattened texture acquisition from a single view of a surface of revolution
 Uncalibrated 3D metric reconstruction and flattened texture acquisition from a single view of a surface of revolution Carlo Colombo Alberto Del Bimbo Federico Pernici Dipartimento di Sistemi e Informatica
Uncalibrated 3D metric reconstruction and flattened texture acquisition from a single view of a surface of revolution Carlo Colombo Alberto Del Bimbo Federico Pernici Dipartimento di Sistemi e Informatica
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Single View Metrology
 Single View Metrology A. Criminisi, I. Reid and A. Zisserman Department of Engineering Science University of Oxford Oxford, UK, OX1 3PJ fcriminis,ian,azg@roots.ox.ac.uk Astract We descrie how 3D affine
Single View Metrology A. Criminisi, I. Reid and A. Zisserman Department of Engineering Science University of Oxford Oxford, UK, OX1 3PJ fcriminis,ian,azg@roots.ox.ac.uk Astract We descrie how 3D affine
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Mosaics wrapup & Stereo
 Mosaics wrapup & Stereo Tues Oct 20 Last time: How to stitch a panorama? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation
Mosaics wrapup & Stereo Tues Oct 20 Last time: How to stitch a panorama? Basic Procedure Take a sequence of images from the same position Rotate the camera about its optical center Compute transformation
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
CS6670: Computer Vision Noah Snavely Lecture 5: Projection Reading: Szeliski 2.1 Projection Reading: Szeliski 2.1 Projection Müller Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html Modeling
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Review. Stephen J. Guy
 Review Stephen J. Guy Overview Pixar short Review last class Review course Area of Graphics Image Processing Rendering Modeling Animation Misc Area of Graphics Image Processing Rendering Modeling Animation
Review Stephen J. Guy Overview Pixar short Review last class Review course Area of Graphics Image Processing Rendering Modeling Animation Misc Area of Graphics Image Processing Rendering Modeling Animation
Real-Time Shadows. Last Time? Today. Why are Shadows Important? Shadows as a Depth Cue. For Intuition about Scene Lighting
 Last Time? Real-Time Shadows Today Why are Shadows Important? Shadows & Soft Shadows in Ray Tracing Planar Shadows Projective Texture Shadows Shadow Maps Shadow Volumes Why are Shadows Important? Depth
Last Time? Real-Time Shadows Today Why are Shadows Important? Shadows & Soft Shadows in Ray Tracing Planar Shadows Projective Texture Shadows Shadow Maps Shadow Volumes Why are Shadows Important? Depth
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Automatic Image Alignment
 Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
Automatic Image Alignment with a lot of slides stolen from Steve Seitz and Rick Szeliski Mike Nese CS194: Image Manipulation & Computational Photography Alexei Efros, UC Berkeley, Fall 2018 Live Homography
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Introduction to Transformations. In Geometry
 + Introduction to Transformations In Geometry + What is a transformation? A transformation is a copy of a geometric figure, where the copy holds certain properties. Example: copy/paste a picture on your
+ Introduction to Transformations In Geometry + What is a transformation? A transformation is a copy of a geometric figure, where the copy holds certain properties. Example: copy/paste a picture on your
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
6.098 Digital and Computational Photography Advanced Computational Photography. Panoramas. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
Single View Geometry. Camera model & Orientation + Position estimation. Jianbo Shi. What am I? University of Pennsylvania GRASP
 Single View Geometry Camera model & Orientation + Position estimation Jianbo Shi What am I? 1 Camera projection model The overall goal is to compute 3D geometry of the scene from just 2D images. We will
Single View Geometry Camera model & Orientation + Position estimation Jianbo Shi What am I? 1 Camera projection model The overall goal is to compute 3D geometry of the scene from just 2D images. We will
Announcements. Mosaics. How to do it? Image Mosaics
 Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Announcements Mosaics Project artifact voting Project 2 out today (help session at end of class) http://www.destination36.com/start.htm http://www.vrseattle.com/html/vrview.php?cat_id=&vrs_id=vrs38 Today
Panoramas. Why Mosaic? Why Mosaic? Mosaics: stitching images together. Why Mosaic? Olivier Gondry. Bill Freeman Frédo Durand MIT - EECS
 Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies
 Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Feature Transfer and Matching in Disparate Stereo Views through the use of Plane Homographies M. Lourakis, S. Tzurbakis, A. Argyros, S. Orphanoudakis Computer Vision and Robotics Lab (CVRL) Institute of
Single View Metrology
 International Journal of Computer Vision 40(2), 123 148, 2000 c 2000 Kluwer Academic Publishers. Manufactured in The Netherlands. Single View Metrology A. CRIMINISI, I. REID AND A. ZISSERMAN Department
International Journal of Computer Vision 40(2), 123 148, 2000 c 2000 Kluwer Academic Publishers. Manufactured in The Netherlands. Single View Metrology A. CRIMINISI, I. REID AND A. ZISSERMAN Department
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Computer Graphics. P05 Viewing in 3D. Part 1. Aleksandra Pizurica Ghent University
 Computer Graphics P05 Viewing in 3D Part 1 Aleksandra Pizurica Ghent University Telecommunications and Information Processing Image Processing and Interpretation Group Viewing in 3D: context Create views
Computer Graphics P05 Viewing in 3D Part 1 Aleksandra Pizurica Ghent University Telecommunications and Information Processing Image Processing and Interpretation Group Viewing in 3D: context Create views
Real-Time Shadows. MIT EECS 6.837, Durand and Cutler
 Real-Time Shadows Last Time? The graphics pipeline Clipping & rasterization of polygons Visibility the depth buffer (z-buffer) Schedule Quiz 2: Thursday November 20 th, in class (two weeks from Thursday)
Real-Time Shadows Last Time? The graphics pipeline Clipping & rasterization of polygons Visibility the depth buffer (z-buffer) Schedule Quiz 2: Thursday November 20 th, in class (two weeks from Thursday)