Single-view 3D Reconstruction
|
|
|
- Ashlynn Jenkins
- 6 years ago
- Views:
Transcription

1 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz
2 Notes about Project 4 (Image-based Lighting) You can work with a partner and submit a joint project You will need a mirrored sphere (see Piazza post) I have a few which I will be able to loan out for a couple days at a time, but I d like to reserve them for emergencies
 The transpose of the rotation matrix is its inverse Use the fact that the 3D directions are orthogonal 2) How to recover the rotation matrix that is aligned with the")
3 Take-home question Suppose you have estimated finite three vanishing points corresponding to orthogonal directions: 1) How to solve for intrinsic matrix? (assume K has three parameters) The transpose of the rotation matrix is its inverse Use the fact that the 3D directions are orthogonal 2) How to recover the rotation matrix that is aligned with the 3D axes defined by these points? In homogeneous coordinates, 3d point at infinity is (X, Y, Z, 0) VP y VP x. VP z Photo from online Tate collection
4 Take-home question Assume that the man is 6 ft tall. What is the height of the front of the building? What is the height of the camera?

5 Take-home question Assume that the man is 6 ft tall. What is the height of the front of the building? What is the height of the camera? ( )/1.55*6=9.56 ~
6
7 Focal length, aperture, depth of field F optical center (Center Of Projection) focal point Increase in focal length zooms in, decreasing field of view (and light per pixel), increasing depth of field (less blur) Increase in aperture lets more light in but decreases depth of field Slide source: Seitz

8 Large aperture = small DOF Small aperture = large DOF Varying the aperture Slide from Efros
9 Shrinking the aperture Why not make the aperture as small as possible? Less light gets through Diffraction effects Slide by Steve Seitz
10 Shrinking the aperture Slide by Steve Seitz
11 The Photographer s Great Compromise What we want More spatial resolution Broader field of view More depth of field How we get it Increase focal length Decrease focal length Decrease aperture Increase aperture Cost Light, FOV DOF Light DOF More temporal resolution Shorten exposure Lengthen exposure Light Temporal Res More light

12 Difficulty in macro (close-up) photography For close objects, we have a small relative DOF Can only shrink aperture so far How to get both bugs in focus?
13 Solution: Focus stacking 1. Take pictures with varying focal length Example from

14 Solution: Focus stacking 1. Take pictures with varying focal length 2. Combine

15 Focus stacking
16 Focus stacking How to combine? 1. Align images (e.g., using corresponding points) 2. Two ideas a) Mask regions by hand and combine with pyramid blend b) Gradient domain fusion (mixed gradient) without masking Automatic solution would make a good final project Recommended Reading: y/workflow.htm#focus%20stacking
17 Relation between field of view and focal length Field of view (angle width) fov 2tan 1 d 2 f Film/Sensor Width Focal length

18 Dolly Zoom or Vertigo Effect How is this done? Zoom in while moving away
19 Dolly zoom (or Vertigo effect ) Field of view (angle width) fov 2 tan 1 d 2 f Film/Sensor Width Focal length 2 tan 2 fov width distance width of object Distance between object and camera

20 Today s class: 3D Reconstruction


21 The challenge One 2D image could be generated by an infinite number of 3D geometries???
22 The solution Make simplifying assumptions about 3D geometry Unlikely Likely
23 Today s class: Two Models Box + frontal billboards Ground plane + non-frontal billboards
 Create a 3D theatre stage")


24 Tour into the Picture (Horry et al. SIGGRAPH 97) Create a 3D theatre stage of five billboards Specify foreground objects through bounding polygons Use camera transformations to navigate through the scene Following slides modified from Efros

25 The idea Many scenes can be represented as an axis-aligned box volume (i.e. a stage) Key assumptions All walls are orthogonal Camera view plane is parallel to back of volume How many vanishing points does the box have? Three, but two at infinity Single-point perspective Can use the vanishing point to fit the box to the particular scene
 Q: What s the significance of the vanishing point location?")

26 Step 1: specify scene geometry User controls the inner box and the vanishing point placement (# of DOF?) Q: What s the significance of the vanishing point location? A: It s at eye (camera) level: ray from center of projection to VP is perpendicular to image plane Under single-point perspective assumptions, the VP should be the principal point of the image
27 Example of user input: vanishing point and back face of view volume are defined High Camera
28 Example of user input: vanishing point and back face of view volume are defined Low Camera
29 Comparison of how image is subdivided based on two different camera positions. You should see how moving the box corresponds to moving the eyepoint in the 3D world. High Camera Low Camera
30 Another example of user input: vanishing point and back face of view volume are defined Left Camera
31 Another example of user input: vanishing point and back face of view volume are defined Right Camera
32 Comparison of two camera placements left and right. Corresponding subdivisions match view you would see if you looked down a hallway. Left Camera Right Camera
33 Question Think about the camera center and image plane What happens when we move the box? What happens when we move the vanishing point?
34 2D to 3D conversion First, we can get ratios left right top vanishing point back plane bottom
35 2D to 3D conversion Size of user-defined back plane determines width/height throughout box (orthogonal sides) Use top versus side ratio to determine relative height and width dimensions of box left right top Left/right and top/bot ratios determine part of 3D camera placement camera pos bottom
 Need to know focal length f (or FOV) Note: can compute position on any object on the ground Simple")
36 Depth of the box Can compute by similar triangles (CVA vs. CV A ) Need to know focal length f (or FOV) Note: can compute position on any object on the ground Simple unprojection What about things off the ground?
37 Step 2: map image textures into frontal view A 2d coordinates 3d plane coordinates C A B D B C D
38 Image rectification p p To unwarp (rectify) an image solve for homography H given p and p : wp =Hp
39 Computing homography Assume we have four matched points: How do we compute homography H? Direct Linear Transformation (DLT) p Hp ' h 0 v vv uv v u u vu uu v u ' ' ' ' ' ' w w v w u p h h h h h h h h h H h h h h h h h h h h
40 Computing homography Direct Linear Transform Apply SVD: USV T = A h = V smallest (column of V T corr. to smallest singular value) h h h h h h h h h h h h H h 0 Ah 0 h n n n n n n n v v v v u v u v v v v u v u u u v u u v u Matlab [U, S, V] = svd(a); h = V(:, end); Explanation of SVD, solving systems of linear equations, derivation of solution here
41 Solving for homographies (more detail) note: (x,y) is used in place of (u,v) here Defines a least squares problem: A h 0 2n 9 9 2n Since h is only defined up to scale, solve for unit vector ĥ Solution: ĥ = eigenvector of A T A with smallest eigenvalue Can derive using Lagrange multipliers method Works with 4 or more points
42 Tour into the picture algorithm 1. Set the box corners
43 Tour into the picture algorithm 1. Set the box corners 2. Set the VP 3. Get 3D coordinates Compute height, width, and depth of box 4. Get texture maps homographies for each face 5. Create file to store plane coordinates and texture maps x



44 Result Render from new views


45 Foreground Objects Use separate billboard for each For this to work, three separate images used: Original image. Mask to isolate desired foreground images. Background with objects removed

46 Foreground Objects Add vertical rectangles for each foreground object Can compute 3D coordinates P0, P1 since they are on known plane. P2, P3 can be computed as before (similar triangles)


47 Foreground Result Video from CMU class: mgwcum


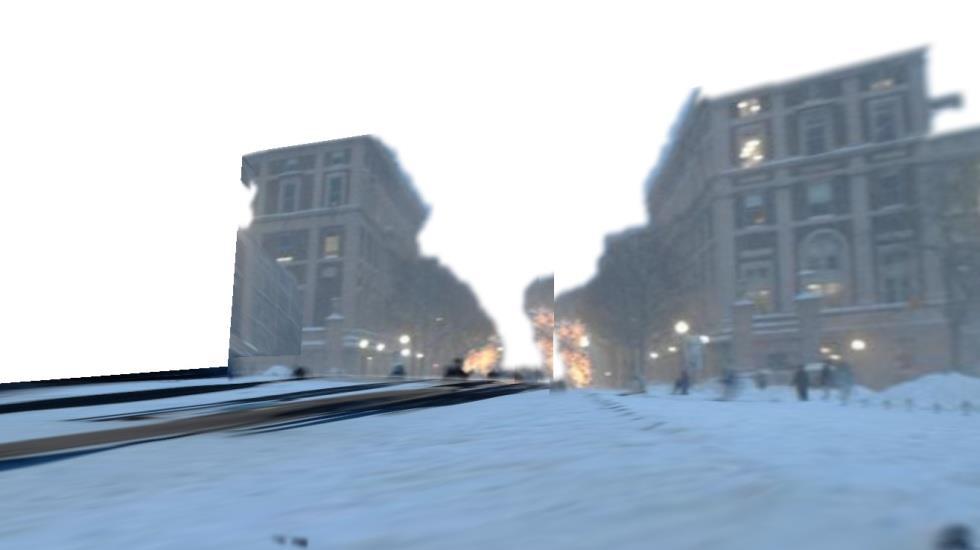
48 Automatic Photo Pop-up Input Image Geometric Labels Cut n Fold 3D Model Ground Vertical Learned Models Sky Hoiem et al. 2005
49 Cutting and Folding Fit ground-vertical boundary Iterative Hough transform
50 Cutting and Folding Form polylines from boundary segments Join segments that intersect at slight angles Remove small overlapping polylines Estimate horizon position from perspective cues
51 Cutting and Folding ``Fold along polylines and at corners ``Cut at ends of polylines and along vertical-sky boundary
52 Cutting and Folding Construct 3D model Texture map




53 Results Input Image Cut and Fold Automatic Photo Pop-up




54 Results Input Image Automatic Photo Pop-up




55 Automatic Photo Pop-up (15 sec)! Comparison with Manual Method [Liebowitz et al. 1999] Input Image



56 Failures Labeling Errors


57 Failures Foreground Objects




58 Adding Foreground Labels Recovered Surface Labels + Ground-Vertical Boundary Fit Object Boundaries + Horizon

59


60 Fitting boxes to indoor scenes Wall Sofa Table Floor


61 Box Layout Algorithm Hedau et al Detect edges 2. Estimate 3 orthogonal vanishing points + 3. Apply region classifier to label pixels with visible surfaces Boosted decision trees on region based on color, texture, edges, position 4. Generate box candidates by sampling pairs of rays from VPs 5. Score each box based on edges and pixel labels Learn score via structured learning 6. Jointly refine box layout and pixel labels to get final estimate





62 Experimental results Detected Edges Surface Labels Box Layout Detected Edges Surface Labels Box Layout




63 Experimental results Detected Edges Surface Labels Box Layout Detected Edges Surface Labels Box Layout



64 Complete 3D from RGBD











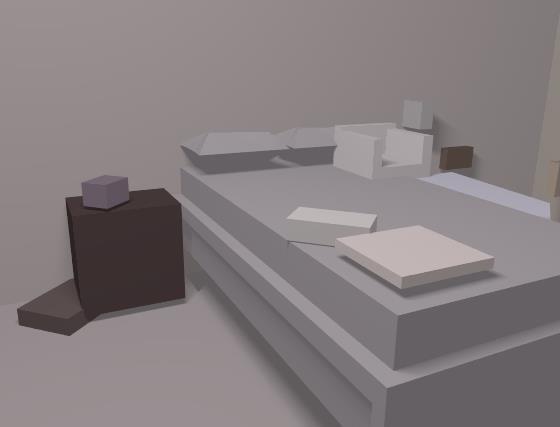
65 Complete 3D from RGBD RGB-D Input Layout Proposals Composing Object Proposals Exemplar Region Retrieval 3D Model Fitting Annotated Scene... Retrieved Region Source 3D Model Transferred Model Retrieved Region Source 3D Model Transferred Model




66 Complete 3D from RGBD
67 Final project ideas If a one-person project: Interactive program to make 3D model from an image (e.g., output in VRML, or draw path for animation) If a two-person team, 2 nd person: Add tools for cutting out foreground objects and automatic hole-filling
68 Summary 2D3D is mathematically impossible (but we do it without even thinking) Need right assumptions about the world geometry Important tools Vanishing points Camera matrix Homography
69 Next Week Project 3 is due Monday Next three classes: image-based lighting How to model light Recover HDR image from multiple LDR images Recover lighting model from an image Render object into a scene with correct lighting and geometry
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Projective Geometry and Camera Models
 /2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
/2/ Projective Geometry and Camera Models Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Note about HW Out before next Tues Prob: covered today, Tues Prob2: covered next Thurs Prob3:
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Single-view metrology
 Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Single-view metrology Magritte, Personal Values, 952 Many slides from S. Seitz, D. Hoiem Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Pinhole Camera Model 10/05/17. Computational Photography Derek Hoiem, University of Illinois
 Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Pinhole Camera Model /5/7 Computational Photography Derek Hoiem, University of Illinois Next classes: Single-view Geometry How tall is this woman? How high is the camera? What is the camera rotation? What
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Final Projects Are coming up fast! Undergrads
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Quiz: which is 1,2,3-point perspective Image
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: :59AM
 CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CIS 580, Machine Perception, Spring 2016 Homework 2 Due: 2015.02.24. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Recover camera orientation By observing
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
CS6670: Computer Vision Noah Snavely Lecture 7: Image Alignment and Panoramas What s inside your fridge? http://www.cs.washington.edu/education/courses/cse590ss/01wi/ Projection matrix intrinsics projection
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: :59AM
 CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
CIS 580, Machine Perception, Spring 2015 Homework 1 Due: 2015.02.09. 11:59AM Instructions. Submit your answers in PDF form to Canvas. This is an individual assignment. 1 Camera Model, Focal Length and
N-Views (1) Homographies and Projection
 Homographies and Projection") CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
CS 4495 Computer Vision N-Views (1) Homographies and Projection Aaron Bobick School of Interactive Computing Administrivia PS 2: Get SDD and Normalized Correlation working for a given windows size say
Projective Geometry and Camera Models
 Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
Projective Geometry and Camera Models Computer Vision CS 43 Brown James Hays Slides from Derek Hoiem, Alexei Efros, Steve Seitz, and David Forsyth Administrative Stuff My Office hours, CIT 375 Monday and
More Single View Geometry
 More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
More Single View Geometry with a lot of slides stolen from Steve Seitz Cyclops Odilon Redon 1904 15-463: Computational hotography Alexei Efros, CMU, Fall 2011 Quiz: which is 1,2,3-point perspective Image
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
More Single View Geometry
 More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
More Single View Geometry 5-463: Rendering and Image rocessing Alexei Efros with a lot of slides stolen from Steve Seitz and Antonio Criminisi Quiz! Image B Image A Image C How can we model this scene?.
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
11/28/17. Midterm Review. Magritte, Homesickness. Computational Photography Derek Hoiem, University of Illinois
 Midterm Review 11/28/17 Computational Photography Derek Hoiem, University of Illinois Magritte, Homesickness Major Topics Linear Filtering How it works Template and Frequency interpretations Image pyramids
Midterm Review 11/28/17 Computational Photography Derek Hoiem, University of Illinois Magritte, Homesickness Major Topics Linear Filtering How it works Template and Frequency interpretations Image pyramids
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
Three-Dimensional Viewing Hearn & Baker Chapter 7
 Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Three-Dimensional Viewing Hearn & Baker Chapter 7 Overview 3D viewing involves some tasks that are not present in 2D viewing: Projection, Visibility checks, Lighting effects, etc. Overview First, set up
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing point Mapping from 3D to 2D Point & Line Goal: Point Homogeneous coordinates represent coordinates in 2 dimensions
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Epipolar Geometry and Stereo Vision
 CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
CS 1699: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 8, 2015 Today Review Projective transforms Image stitching (homography) Epipolar
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
Mosaics. Today s Readings
 Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Mosaics VR Seattle: http://www.vrseattle.com/ Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html Today s Readings Szeliski and Shum paper (sections
Image formation. Thanks to Peter Corke and Chuck Dyer for the use of some slides
 Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Image formation Thanks to Peter Corke and Chuck Dyer for the use of some slides Image Formation Vision infers world properties form images. How do images depend on these properties? Two key elements Geometry
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
CS 558: Computer Vision 13 th Set of Notes
 CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
CS 558: Computer Vision 13 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Context and Spatial Layout
Perspective projection. A. Mantegna, Martyrdom of St. Christopher, c. 1450
 Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Perspective projection A. Mantegna, Martyrdom of St. Christopher, c. 1450 Overview of next two lectures The pinhole projection model Qualitative properties Perspective projection matrix Cameras with lenses
Computer Vision I Name : CSE 252A, Fall 2012 Student ID : David Kriegman Assignment #1. (Due date: 10/23/2012) x P. = z
 x P. = z") Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
Computer Vision I Name : CSE 252A, Fall 202 Student ID : David Kriegman E-Mail : Assignment (Due date: 0/23/202). Perspective Projection [2pts] Consider a perspective projection where a point = z y x P
CS201 Computer Vision Camera Geometry
 CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
CS201 Computer Vision Camera Geometry John Magee 25 November, 2014 Slides Courtesy of: Diane H. Theriault (deht@bu.edu) Question of the Day: How can we represent the relationships between cameras and the
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry
 55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
55:148 Digital Image Processing Chapter 11 3D Vision, Geometry Topics: Basics of projective geometry Points and hyperplanes in projective space Homography Estimating homography from point correspondence
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
CS4670: Computer Vision
 CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
CS467: Computer Vision Noah Snavely Lecture 13: Projection, Part 2 Perspective study of a vase by Paolo Uccello Szeliski 2.1.3-2.1.6 Reading Announcements Project 2a due Friday, 8:59pm Project 2b out Friday
Single-view 3D reasoning
 Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
Single-view 3D reasoning Lecturer: Bryan Russell UW CSE 576, May 2013 Slides borrowed from Antonio Torralba, Alyosha Efros, Antonio Criminisi, Derek Hoiem, Steve Seitz, Stephen Palmer, Abhinav Gupta, James
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-2424 Tel: (631)632-845; Fax: (631)632-8334 qin@cs.stonybrook.edu
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
CSE328 Fundamentals of Computer Graphics
 CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
CSE328 Fundamentals of Computer Graphics Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 794--44 Tel: (63)632-845; Fax: (63)632-8334 qin@cs.sunysb.edu
CS223b Midterm Exam, Computer Vision. Monday February 25th, Winter 2008, Prof. Jana Kosecka
 CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
CS223b Midterm Exam, Computer Vision Monday February 25th, Winter 2008, Prof. Jana Kosecka Your name email This exam is 8 pages long including cover page. Make sure your exam is not missing any pages.
Midterm Examination CS 534: Computational Photography
 Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Midterm Examination CS 534: Computational Photography November 3, 2016 NAME: Problem Score Max Score 1 6 2 8 3 9 4 12 5 4 6 13 7 7 8 6 9 9 10 6 11 14 12 6 Total 100 1 of 8 1. [6] (a) [3] What camera setting(s)
Panoramas. Why Mosaic? Why Mosaic? Mosaics: stitching images together. Why Mosaic? Olivier Gondry. Bill Freeman Frédo Durand MIT - EECS
 Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
Olivier Gondry 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Director of music video and commercial Special effect specialist (Morphing, rotoscoping) Today
A simple method for interactive 3D reconstruction and camera calibration from a single view
 A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
Overview. By end of the week:
 Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
Overview By end of the week: - Know the basics of git - Make sure we can all compile and run a C++/ OpenGL program - Understand the OpenGL rendering pipeline - Understand how matrices are used for geometric
ECE-161C Cameras. Nuno Vasconcelos ECE Department, UCSD
 ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
ECE-161C Cameras Nuno Vasconcelos ECE Department, UCSD Image formation all image understanding starts with understanding of image formation: projection of a scene from 3D world into image on 2D plane 2
Structure from Motion. Prof. Marco Marcon
 Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Structure from Motion Prof. Marco Marcon Summing-up 2 Stereo is the most powerful clue for determining the structure of a scene Another important clue is the relative motion between the scene and (mono)
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Viewing. Reading: Angel Ch.5
 Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
Viewing Reading: Angel Ch.5 What is Viewing? Viewing transform projects the 3D model to a 2D image plane 3D Objects (world frame) Model-view (camera frame) View transform (projection frame) 2D image View
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 12 130228 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Panoramas, Mosaics, Stitching Two View Geometry
Image Based Rendering. D.A. Forsyth, with slides from John Hart
 Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Image Based Rendering D.A. Forsyth, with slides from John Hart Topics Mosaics translating cameras reveal extra information, break occlusion Optical flow for very small movements of the camera Explicit
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Single View Geometry. Camera model & Orientation + Position estimation. What am I?
 Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Single View Geometry Camera model & Orientation + Position estimation What am I? Vanishing points & line http://www.wetcanvas.com/ http://pennpaint.blogspot.com/ http://www.joshuanava.biz/perspective/in-other-words-the-observer-simply-points-in-thesame-direction-as-the-lines-in-order-to-find-their-vanishing-point.html
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Modeling Light. On Simulating the Visual Experience
 Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
Modeling Light 15-463: Rendering and Image Processing Alexei Efros On Simulating the Visual Experience Just feed the eyes the right data No one will know the difference! Philosophy: Ancient question: Does
6.098 Digital and Computational Photography Advanced Computational Photography. Panoramas. Bill Freeman Frédo Durand MIT - EECS
 6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
6.098 Digital and Computational Photography 6.882 Advanced Computational Photography Panoramas Bill Freeman Frédo Durand MIT - EECS Lots of slides stolen from Alyosha Efros, who stole them from Steve Seitz
Context. CS 554 Computer Vision Pinar Duygulu Bilkent University. (Source:Antonio Torralba, James Hays)
") Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Context CS 554 Computer Vision Pinar Duygulu Bilkent University (Source:Antonio Torralba, James Hays) A computer vision goal Recognize many different objects under many viewing conditions in unconstrained
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision CS 776 Fall 2018
 Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision CS 776 Fall 2018 Cameras & Photogrammetry 1 Prof. Alex Berg (Slide credits to many folks on individual slides) Cameras & Photogrammetry 1 Albrecht Dürer early 1500s Brunelleschi, early
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
CS 4204 Computer Graphics
 CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
CMPSCI 670: Computer Vision! Image formation. University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji
 CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
CMPSCI 670: Computer Vision! Image formation University of Massachusetts, Amherst September 8, 2014 Instructor: Subhransu Maji MATLAB setup and tutorial Does everyone have access to MATLAB yet? EdLab accounts
DD2429 Computational Photography :00-19:00
 . Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
. Examination: DD2429 Computational Photography 202-0-8 4:00-9:00 Each problem gives max 5 points. In order to pass you need about 0-5 points. You are allowed to use the lecture notes and standard list
CIS 580, Machine Perception, Spring 2014: Assignment 4 Due: Wednesday, April 10th, 10:30am (use turnin)
") CIS 580, Machine Perception, Spring 2014: Assignment 4 Due: Wednesday, April 10th, 10:30am (use turnin) Solutions (hand calculations, plots) have to be submitted electronically as a single pdf file using
CIS 580, Machine Perception, Spring 2014: Assignment 4 Due: Wednesday, April 10th, 10:30am (use turnin) Solutions (hand calculations, plots) have to be submitted electronically as a single pdf file using
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Introduction to Computer Vision. Week 3, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Introduction to Computer Vision Week 3, Fall 2010 Instructor: Prof. Ko Nishino Last Week! Image Sensing " Our eyes: rods and cones " CCD, CMOS, Rolling Shutter " Sensing brightness and sensing color! Projective
Notes on Assignment. Notes on Assignment. Notes on Assignment. Notes on Assignment
 Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
ECE 470: Homework 5. Due Tuesday, October 27 in Seth Hutchinson. Luke A. Wendt
 ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
ECE 47: Homework 5 Due Tuesday, October 7 in class @:3pm Seth Hutchinson Luke A Wendt ECE 47 : Homework 5 Consider a camera with focal length λ = Suppose the optical axis of the camera is aligned with
Computer Vision Project-1
 University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
University of Utah, School Of Computing Computer Vision Project- Singla, Sumedha sumedha.singla@utah.edu (00877456 February, 205 Theoretical Problems. Pinhole Camera (a A straight line in the world space
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Image Stitching. Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi
 Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
Image Stitching Slides from Rick Szeliski, Steve Seitz, Derek Hoiem, Ira Kemelmacher, Ali Farhadi Combine two or more overlapping images to make one larger image Add example Slide credit: Vaibhav Vaish
CS 2770: Intro to Computer Vision. Multiple Views. Prof. Adriana Kovashka University of Pittsburgh March 14, 2017
 CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
CS 277: Intro to Computer Vision Multiple Views Prof. Adriana Kovashka Universit of Pittsburgh March 4, 27 Plan for toda Affine and projective image transformations Homographies and image mosaics Stereo
Announcements. Mosaics. Image Mosaics. How to do it? Basic Procedure Take a sequence of images from the same position =
 Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Announcements Project 2 out today panorama signup help session at end of class Today mosaic recap blending Mosaics Full screen panoramas (cubic): http://www.panoramas.dk/ Mars: http://www.panoramas.dk/fullscreen3/f2_mars97.html
Lecture 9: Epipolar Geometry
 Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Lecture 9: Epipolar Geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Why is stereo useful? Epipolar constraints Essential and fundamental matrix Estimating F (Problem Set 2
Raycasting. Chapter Raycasting foundations. When you look at an object, like the ball in the picture to the left, what do
 Chapter 4 Raycasting 4. Raycasting foundations When you look at an, like the ball in the picture to the left, what do lamp you see? You do not actually see the ball itself. Instead, what you see is the
Chapter 4 Raycasting 4. Raycasting foundations When you look at an, like the ball in the picture to the left, what do lamp you see? You do not actually see the ball itself. Instead, what you see is the
COMP 175 COMPUTER GRAPHICS. Ray Casting. COMP 175: Computer Graphics April 26, Erik Anderson 09 Ray Casting
 Ray Casting COMP 175: Computer Graphics April 26, 2018 1/41 Admin } Assignment 4 posted } Picking new partners today for rest of the assignments } Demo in the works } Mac demo may require a new dylib I
Ray Casting COMP 175: Computer Graphics April 26, 2018 1/41 Admin } Assignment 4 posted } Picking new partners today for rest of the assignments } Demo in the works } Mac demo may require a new dylib I
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric