Shape Matching for 3D Retrieval and Recognition. Agenda. 3D collections. Ivan Sipiran and Benjamin Bustos
|
|
|
- Ira Matthews
- 5 years ago
- Views:
Transcription

1 Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape retrieval contests Techniques Future directions Final remarks 3D collections





2 3D devices 3D applications 3D as multimedia The same problems as other media Representation Storage Analysis Processing Content-based matching or?




3 The problem with matching? Non-rigid matching? Partial matching Agenda Introduction Applications Datasets Shape retrieval contests Techniques Future directions Final remarks Applications Craniofacial research Atmosukarto et al., Pattern Recognition, 2010?



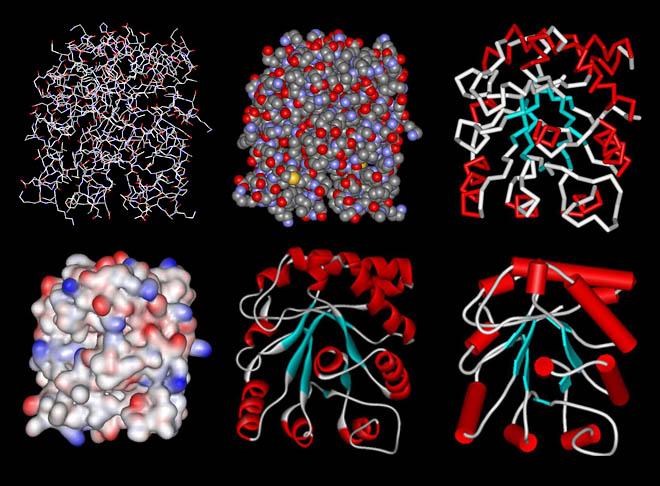
4 Applications 3D protein retrieval and classification Paquet and Viktor, Proc. VLDB, 2008 Applications 3D retrieval for museums Goodall et al., Proc. CIVR, 2004 Applications Human ear recognition in 3D Chen and Bhanu, IEEE TPAMI, 2009



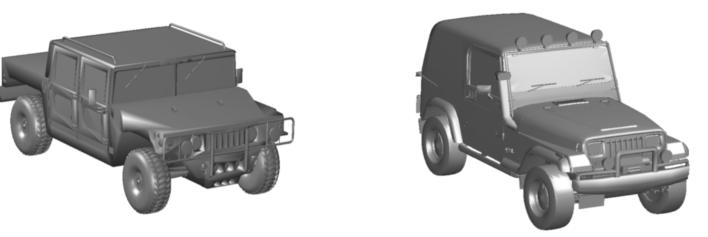
5 Applications CAD/CAM You and Tsai, Int. J. Adv. Manuf. Tech., 2010 Applications Archaeology Huang et al., ACM TOG, 2006 Applications 3D video sequences Huang et al., IJCV, 2010


6 Applications 3D face recognition Bronstein et al., IJCV, 2005 Agenda Introduction Applications Datasets Shape retrieval contests Techniques Future directions Final remarks Datasets Princeton Shape Benchmark 1814 models: 907 training, 907 testing Available in:


7 Datasets Purdue Engineering Shape Benchmark Mechanical parts Available in: Datasets TOSCA dataset 80 objects with non-rigid transformations Available in: Agenda Introduction Applications Datasets Shape retrieval contests Techniques Future directions Final remarks

 720 objects organized in 40 classes 22 algorithms evaluated Available")
8 Shape Retrieval Contests (SHREC) Competitions started in 2006 To date: 40+ tracks presented Each track has a dataset and evaluation tools Good initiative to evaluate algorithms and make comparisons with the state of the art. SHREC Examples CAD models (2008) Using the ESB benchmark Six participants Available in: SHREC Examples Generic shape retrieval (2009) 720 objects organized in 40 classes 22 algorithms evaluated Available in:
 Three shapes, 9 transformations in 5 levels of")



 600")
9 SHREC Examples Feature detection and description (2010) Three shapes, 9 transformations in 5 levels of strenght. Goal: measure the repeatability of local features Available in: SHREC Examples Face scans (2011) Training set: 60 models Test set: 650 scans Available in: SHREC Examples Non-rigid retrieval (2011) 600 objects with non-rigid transformations Available in:

 360 models, 7200 partial queries Available in: http://dataset.")

10 SHREC Examples Sketch-based 3D models retrieval (2012) 400 3D models 250 hand-drawn sketches Available in: SHREC Examples Large-scale partial shape retrieval (2013) 360 models, 7200 partial queries Available in: SHREC Examples Retrieval of Objects Captured with Low-Cost Depth-Sensing Cameras (2013) 192 models captured with Kinect Available in:
11 Agenda Introduction Applications Datasets Shape retrieval contests Techniques Future directions Final remarks Techniques Generic shape retrieval Shape recognition Non-rigid shape retrieval Shape correspondences Techniques Generic shape retrieval Shape recognition Non-rigid shape retrieval Shape correspondences


12 The global approach Transform a 3D object into a numeric/symbolic representation Compare two objects through their representations. Depth-buffer descriptor Image-based descriptor Pose normalization Depth-buffer construction Fourier transformation Selection of coefficients Depth-buffer descriptor Pose normalization Continuos PCA




13 Depth-buffer descriptor Pose normalization Continuous PCA Depth-buffer descriptor Construction Project the object into the cube's faces Depth-buffer descriptor Fourier transformation



14 Depth-buffer descriptor Selection of coefficients As depth-buffers are real, coefficient posses the symmetry property. Select coefficients whose indices satisfy for some natural number k. PANORAMA descriptor Image-based descriptor Pose normalization (Continuous PCA) Projection Fourier and Wavelet transformations PANORAMA descriptor Projection



15 PANORAMA descriptor Transformations Fourier Haar and Coiflet wavelets Features computed over sub-images of the DWT Global + Local approach Trying to take advantage of the local information in shapes Global + Local approach We need discriminative and robust partitions. Local features-based approach

16 Step 1 : Detection of interest points Harris 3D algorithm Step 1 : Detection of interest points Meshes with bad triangulations Control of resolution to improve triangulations Adaptive clustering of keypoints in Euclidean space Near points: same cluster Far points: different cluster
17 Partitioning and description Extract the patch enclosed by a sphere containing a cluster. We use a kd-tree to efficiently search vertices in the enclosing sphere. An object is represented as Matching Given two objects O and Q, with their representations The distance is i j O Q
18 Matching: Optimization The optimum The distance Matching Solved using binary programming with Linear approach is not geometrically consistent Quadratic approach i i j O Q
19 Quadratic programming Now, we consider the distance between parts ds Quadratic approach solved with Binary Quadratic Programming with Results using SHREC'2009 Generic Shape Retrieval



20 Class-by-class Class-by-class High variability inside classes Difficult for representations

21 Experiments can be tested online in publisher's website Link: Techniques Generic shape retrieval Shape recognition Non-rigid shape retrieval Shape correspondences Spin images Robust local descriptor It is based on how points are distributed on a surface


 Spin images Computing positions Accumulation")
22 Spin images A local basis is constructed from An oriented point p The normal n The tangent plane P through p and perpendicular to n Spin images Any point q can be represented in this basis The coordinate of q in the spin image is computed from (, ) Spin images Computing positions Accumulation with bilinear weights



23 Spin images Spin images Matching Given two spin images Similarity Techniques Generic shape retrieval Shape recognition Non-rigid shape retrieval Shape correspondences


24 Non-rigid shape retrieval Models with a non-rigid transformation Several approaches Elegant theory: spectral domain Shape Google Represent a 3D model as a quantized vector of spectral descriptors Given a surface S, the heat diffusion process is governed by the heat equation Shape Google The fundamental solution of heat equation is the heat kernel, represented as Donde i and vi are the eigenvalues and eigenvectos of the Laplace-Beltrami operator, respectively.



25 Shape Google A representation for a point can be obtained Using values for t, we can get a descriptor which is called Heat Kernel Signature Shape Google Heat kernel signatures Shape Google Heat kernel signatures are sensitive to scale A scale-invariant variant has been proposed It uses finite differences and Fourier coefficients for removing the scale dependency of HKS

26 Shape Google Compute a descriptor for each vertex in a mesh Given the entire collection of descriptors, perform a k-means clustering to find a dictionary Quantize the descriptors of a shape using the dictionary Shape Google SQFD for Retrieval Unlike bag of features, this approach is local for defining the signatures Signature Quadratic Form Distance Final representation only depends on the object information It is possible to measure the distance between objects with representations of different sizes
27 SQFD for retrieval Object is represented as a set of features Let us suppose the existence of a local partitioning The signature is defined as SQFD for retrieval Given two signatures SQFD is defined as SQFD for retrieval Three approaches for computing the signatures All descriptors of an object Descriptors of keypoints Geodesic clusters Adaptive clustering for computing the local partitioning We use the Heat Kernel Signatures as descriptors

28 SQFD for retrieval All vertices SQFD for retrieval Descriptor of keypoints SQFD for retrieval Geodesic clusters

29 SQFD for retrieval Examples Open problems Query specification Efficiency and large-scale retrieval Object representation Partial matching Automatic 3D object annotation Final remarks Comprehensive literature on 3D retrieval Well-established background for applications Cheap 3D devices will benefit real-world applications Active research community SHREC
Shape Matching for 3D Retrieval and Recognition
 Shape Matching for 3D Retrieval and Recognition PRISMA Research Group Department of Computer Science University of Chile SIBGRAPI 2013 Tutorial, Arequipa - Perú, August 5, 2013 Outline Introduction 1 Introduction
Shape Matching for 3D Retrieval and Recognition PRISMA Research Group Department of Computer Science University of Chile SIBGRAPI 2013 Tutorial, Arequipa - Perú, August 5, 2013 Outline Introduction 1 Introduction
Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures
 Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures Anastasia Dubrovina Technion Israel Institute of Technology Introduction Correspondence detection
Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures Anastasia Dubrovina Technion Israel Institute of Technology Introduction Correspondence detection
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Image Processing. Image Features
 Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Image Processing Image Features Preliminaries 2 What are Image Features? Anything. What they are used for? Some statements about image fragments (patches) recognition Search for similar patches matching
Salient Local 3D Features for 3D Shape Retrieval
 Salient Local 3D Features for 3D Shape Retrieval Afzal Godil a, Asim Imdad Wagan b a National Institute of Standards and Technolog Gaithersburg, MD, USA b Dept of CSE, QUEST Universit Nawabshah, Pakistan
Salient Local 3D Features for 3D Shape Retrieval Afzal Godil a, Asim Imdad Wagan b a National Institute of Standards and Technolog Gaithersburg, MD, USA b Dept of CSE, QUEST Universit Nawabshah, Pakistan
Preparation Meeting. Recent Advances in the Analysis of 3D Shapes. Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers
 Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers What You Will Learn in the Seminar Get an overview on state of the art
Improving 3D Shape Retrieval Methods based on Bag-of Feature Approach by using Local Codebooks
 Improving 3D Shape Retrieval Methods based on Bag-of Feature Approach by using Local Codebooks El Wardani Dadi 1,*, El Mostafa Daoudi 1 and Claude Tadonki 2 1 University Mohammed First, Faculty of Sciences,
Improving 3D Shape Retrieval Methods based on Bag-of Feature Approach by using Local Codebooks El Wardani Dadi 1,*, El Mostafa Daoudi 1 and Claude Tadonki 2 1 University Mohammed First, Faculty of Sciences,
Describing 3D Geometric Primitives Using the Gaussian Sphere and the Gaussian Accumulator
 Noname manuscript No. (will be inserted by the editor) Describing 3D Geometric Primitives Using the Gaussian and the Gaussian Accumulator Zahra Toony Denis Laurendeau Christian Gagné Received: date / Accepted:
Noname manuscript No. (will be inserted by the editor) Describing 3D Geometric Primitives Using the Gaussian and the Gaussian Accumulator Zahra Toony Denis Laurendeau Christian Gagné Received: date / Accepted:
Learning 3D Part Detection from Sparsely Labeled Data: Supplemental Material
 Learning 3D Part Detection from Sparsely Labeled Data: Supplemental Material Ameesh Makadia Google New York, NY 10011 makadia@google.com Mehmet Ersin Yumer Carnegie Mellon University Pittsburgh, PA 15213
Learning 3D Part Detection from Sparsely Labeled Data: Supplemental Material Ameesh Makadia Google New York, NY 10011 makadia@google.com Mehmet Ersin Yumer Carnegie Mellon University Pittsburgh, PA 15213
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Detection and Characterization of Intrinsic Symmetry of 3D Shapes
 Detection and Characterization of Intrinsic Symmetry of 3D Shapes Anirban Mukhopadhyay Suchendra M. Bhandarkar Fatih Porikli Department of Visual Data Analysis, Zuse Institute Berlin, Berlin, Germany Department
Detection and Characterization of Intrinsic Symmetry of 3D Shapes Anirban Mukhopadhyay Suchendra M. Bhandarkar Fatih Porikli Department of Visual Data Analysis, Zuse Institute Berlin, Berlin, Germany Department
Learning High-Level Feature by Deep Belief Networks for 3-D Model Retrieval and Recognition
 2154 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 16, NO. 8, DECEMBER 2014 Learning High-Level Feature by Deep Belief Networks for 3-D Model Retrieval and Recognition Shuhui Bu, Member, IEEE, Zhenbao Liu, Member,
2154 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 16, NO. 8, DECEMBER 2014 Learning High-Level Feature by Deep Belief Networks for 3-D Model Retrieval and Recognition Shuhui Bu, Member, IEEE, Zhenbao Liu, Member,
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. UW EE
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Non-rigid 3D Model Retrieval Using Set of Local Statistical Features
 Non-rigid 3D Model Retrieval Using Set of Local Statistical Features Yuki Ohkita, Yuya Ohishi, University of Yamanashi Kofu, Yamanashi, Japan {g09mk004, g11mk008}at yamanashi.ac.jp Takahiko Furuya Nisca
Non-rigid 3D Model Retrieval Using Set of Local Statistical Features Yuki Ohkita, Yuya Ohishi, University of Yamanashi Kofu, Yamanashi, Japan {g09mk004, g11mk008}at yamanashi.ac.jp Takahiko Furuya Nisca
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
A Fully Hierarchical Approach for Finding Correspondences in Non-rigid Shapes
 A Fully Hierarchical Approach for Finding Correspondences in Non-rigid Shapes Ivan Sipiran 1 and Benjamin Bustos 2 1 Department of Computer and Information Science, University of Konstanz 2 Department
A Fully Hierarchical Approach for Finding Correspondences in Non-rigid Shapes Ivan Sipiran 1 and Benjamin Bustos 2 1 Department of Computer and Information Science, University of Konstanz 2 Department
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Compu&ng Correspondences in Geometric Datasets. 4.2 Symmetry & Symmetriza/on
 Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
3D Shape Analysis for Quantification, Classification and Retrieval
 3D Shape Analysis for Quantification, Classification and Retrieval 3D Shape Analysis 3D mesh object 2D salient map 2D histogram GP tree Indriyati Atmosukarto PhD Defense Advisor: Prof Linda Shapiro General
3D Shape Analysis for Quantification, Classification and Retrieval 3D Shape Analysis 3D mesh object 2D salient map 2D histogram GP tree Indriyati Atmosukarto PhD Defense Advisor: Prof Linda Shapiro General
An Approach for Reduction of Rain Streaks from a Single Image
 An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
An Approach for Reduction of Rain Streaks from a Single Image Vijayakumar Majjagi 1, Netravati U M 2 1 4 th Semester, M. Tech, Digital Electronics, Department of Electronics and Communication G M Institute
A comparison of methods for non-rigid 3D shape retrieval
 A comparison of methods for non-rigid 3D shape retrieval Zhouhui Lian, Afzal Godil, Benjamin Bustos, Mohamed Daoudi, Jeroen Hermans, Shun Kawamura, Yukinori Kurita, Guillaume Lavoué, Hien Van Nguyen, Ryutarou
A comparison of methods for non-rigid 3D shape retrieval Zhouhui Lian, Afzal Godil, Benjamin Bustos, Mohamed Daoudi, Jeroen Hermans, Shun Kawamura, Yukinori Kurita, Guillaume Lavoué, Hien Van Nguyen, Ryutarou
Patch-Wise Charge Distribution Density for 3D Model Retrieval
 Patch-Wise Charge Distribution Density for 3D Model Retrieval Fattah Alizadeh, Alistair Sutherland, and Khaled Moradi Abstract The cornerstone of any 3D retrieval system is a shape descriptor. They have
Patch-Wise Charge Distribution Density for 3D Model Retrieval Fattah Alizadeh, Alistair Sutherland, and Khaled Moradi Abstract The cornerstone of any 3D retrieval system is a shape descriptor. They have
Multiscale 3D Feature Extraction and Matching
 Multiscale 3D Feature Extraction and Matching Hadi Fadaifard and George Wolberg Graduate Center, City University of New York May 18, 2011 Hadi Fadaifard and George Wolberg Multiscale 3D Feature Extraction
Multiscale 3D Feature Extraction and Matching Hadi Fadaifard and George Wolberg Graduate Center, City University of New York May 18, 2011 Hadi Fadaifard and George Wolberg Multiscale 3D Feature Extraction
A Segmentation of Non-rigid Shape with Heat Diffuse
 2012 4th International Conference on Signal Processing Systems (ICSPS 2012) IPCSIT vol. 58 (2012) (2012) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.2012.V58.6 A Segmentation of Non-rigid Shape with Heat
2012 4th International Conference on Signal Processing Systems (ICSPS 2012) IPCSIT vol. 58 (2012) (2012) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.2012.V58.6 A Segmentation of Non-rigid Shape with Heat
Algorithms for 3D Isometric Shape Correspondence
 Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Discovering Similarities in 3D Data
 Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering Basic Idea Generalize existing numeric surface representations for matching 3-D objects to the problem of identifying
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering Basic Idea Generalize existing numeric surface representations for matching 3-D objects to the problem of identifying
Graphics. Automatic Efficient to compute Smooth Low-distortion Defined for every point Aligns semantic features. Other disciplines
 Goal: Find a map between surfaces Blended Intrinsic Maps Vladimir G. Kim Yaron Lipman Thomas Funkhouser Princeton University Goal: Find a map between surfaces Automatic Efficient to compute Smooth Low-distortion
Goal: Find a map between surfaces Blended Intrinsic Maps Vladimir G. Kim Yaron Lipman Thomas Funkhouser Princeton University Goal: Find a map between surfaces Automatic Efficient to compute Smooth Low-distortion
Image Features: Detection, Description, and Matching and their Applications
 Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Image Features: Detection, Description, and Matching and their Applications Image Representation: Global Versus Local Features Features/ keypoints/ interset points are interesting locations in the image.
Recognizing Deformable Shapes. Salvador Ruiz Correa (CSE/EE576 Computer Vision I)
") Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I) Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors
 Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors Master thesis Nikita Araslanov Compute Science Institute VI University of Bonn March 29, 2016 Nikita
Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors Master thesis Nikita Araslanov Compute Science Institute VI University of Bonn March 29, 2016 Nikita
High-Level Computer Vision
 High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
Local Signature Quantization by Sparse Coding
 Eurographics Workshop on 3D Object Retrieval (2013) S. Biasotti, I. Pratikakis, U. Castellani, T. Schreck, A. Godil, and R. Veltkamp (Editors) Local Signature Quantization by Sparse Coding D. Boscaini
Eurographics Workshop on 3D Object Retrieval (2013) S. Biasotti, I. Pratikakis, U. Castellani, T. Schreck, A. Godil, and R. Veltkamp (Editors) Local Signature Quantization by Sparse Coding D. Boscaini
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Detecting Multiple Symmetries with Extended SIFT
 1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
Robot localization method based on visual features and their geometric relationship
 , pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
, pp.46-50 http://dx.doi.org/10.14257/astl.2015.85.11 Robot localization method based on visual features and their geometric relationship Sangyun Lee 1, Changkyung Eem 2, and Hyunki Hong 3 1 Department
SHREC 13 Track: Large-Scale Partial Shape Retrieval Using Simulated Range Images
 Eurographics Workshop on 3D Object Retrieval(2013) S. Biasotti, I. Pratikakis, U. Castellani, T. Schreck, A. Godil, and R. Veltkamp (Editors) SHREC 13 Track: Large-Scale Partial Shape Retrieval Using Simulated
Eurographics Workshop on 3D Object Retrieval(2013) S. Biasotti, I. Pratikakis, U. Castellani, T. Schreck, A. Godil, and R. Veltkamp (Editors) SHREC 13 Track: Large-Scale Partial Shape Retrieval Using Simulated
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
STEPPING into the era of big data, there are many
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 2015 1 3D Shape Matching via Two Layer Coding Xiang Bai, Senior Member, IEEE, Song Bai, Student Member, IEEE, Zhuotun Zhu, and
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL., NO., 2015 1 3D Shape Matching via Two Layer Coding Xiang Bai, Senior Member, IEEE, Song Bai, Student Member, IEEE, Zhuotun Zhu, and
International Journal of Modern Trends in Engineering and Research
 International Journal of Modern Trends in Engineering and Research www.ijmter.com e-issn No.:2349-9745, Date: 2-4 July, 2015 Analysis of Content Based Video Copy Detection using different Wavelet Transforms
International Journal of Modern Trends in Engineering and Research www.ijmter.com e-issn No.:2349-9745, Date: 2-4 July, 2015 Analysis of Content Based Video Copy Detection using different Wavelet Transforms
Multi-view Facial Expression Recognition Analysis with Generic Sparse Coding Feature
 0/19.. Multi-view Facial Expression Recognition Analysis with Generic Sparse Coding Feature Usman Tariq, Jianchao Yang, Thomas S. Huang Department of Electrical and Computer Engineering Beckman Institute
0/19.. Multi-view Facial Expression Recognition Analysis with Generic Sparse Coding Feature Usman Tariq, Jianchao Yang, Thomas S. Huang Department of Electrical and Computer Engineering Beckman Institute
Multi-view 3D retrieval using silhouette intersection and multi-scale contour representation
 Multi-view 3D retrieval using silhouette intersection and multi-scale contour representation Thibault Napoléon Telecom Paris CNRS UMR 5141 75013 Paris, France napoleon@enst.fr Tomasz Adamek CDVP Dublin
Multi-view 3D retrieval using silhouette intersection and multi-scale contour representation Thibault Napoléon Telecom Paris CNRS UMR 5141 75013 Paris, France napoleon@enst.fr Tomasz Adamek CDVP Dublin
Gaussian and Mean Curvature Planar points: Zero Gaussian curvature and zero mean curvature Tangent plane intersects surface at infinity points Gauss C
 Outline Shape Analysis Basics COS 526, Fall 21 Curvature PCA Distance Features Some slides from Rusinkiewicz Curvature Curvature Curvature κof a curve is reciprocal of radius of circle that best approximates
Outline Shape Analysis Basics COS 526, Fall 21 Curvature PCA Distance Features Some slides from Rusinkiewicz Curvature Curvature Curvature κof a curve is reciprocal of radius of circle that best approximates
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
Exploring Collections of 3D Models using Fuzzy Correspondences
 Exploring Collections of 3D Models using Fuzzy Correspondences Vladimir G. Kim Wilmot Li Niloy J. Mitra Princeton University Adobe UCL Stephen DiVerdi Adobe Thomas Funkhouser Princeton University Motivating
Exploring Collections of 3D Models using Fuzzy Correspondences Vladimir G. Kim Wilmot Li Niloy J. Mitra Princeton University Adobe UCL Stephen DiVerdi Adobe Thomas Funkhouser Princeton University Motivating
Searching for the Shape
 Searching for the Shape PURDUEURDUE U N I V E R S I T Y Yagna Kalyanaraman PRECISE, Purdue University The world we are in Designers spend 60% time searching for right info 75% of design activity is design
Searching for the Shape PURDUEURDUE U N I V E R S I T Y Yagna Kalyanaraman PRECISE, Purdue University The world we are in Designers spend 60% time searching for right info 75% of design activity is design
Heat Front Propagation Contours for 3D Face Recognition
 Heat Front Propagation Contours for 3D Face Recognition Mostafa Abdelrahman 1, Aly A. Farag 1, and Moumen El-Melegy 1,2 1 Computer Vision and Image Processing Laboratory University of Louisville, Louisville,
Heat Front Propagation Contours for 3D Face Recognition Mostafa Abdelrahman 1, Aly A. Farag 1, and Moumen El-Melegy 1,2 1 Computer Vision and Image Processing Laboratory University of Louisville, Louisville,
Representing 3D models for alignment and recognition
 Representing 3D models for alignment and recognition Mathieu Aubry To cite this version: Mathieu Aubry. Representing 3D models for alignment and recognition. Computer Vision and Pattern Recognition [cs.cv].
Representing 3D models for alignment and recognition Mathieu Aubry To cite this version: Mathieu Aubry. Representing 3D models for alignment and recognition. Computer Vision and Pattern Recognition [cs.cv].
Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts
 Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts Reed M. Williams and Horea T. Ilieş Department of Mechanical Engineering University of Connecticut Storrs, CT
Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts Reed M. Williams and Horea T. Ilieş Department of Mechanical Engineering University of Connecticut Storrs, CT
Fast Indexing and Search. Lida Huang, Ph.D. Senior Member of Consulting Staff Magma Design Automation
 Fast Indexing and Search Lida Huang, Ph.D. Senior Member of Consulting Staff Magma Design Automation Motivation Object categorization? http://www.cs.utexas.edu/~grauman/slides/jain_et_al_cvpr2008.ppt Motivation
Fast Indexing and Search Lida Huang, Ph.D. Senior Member of Consulting Staff Magma Design Automation Motivation Object categorization? http://www.cs.utexas.edu/~grauman/slides/jain_et_al_cvpr2008.ppt Motivation
Geometric Data. Goal: describe the structure of the geometry underlying the data, for interpretation or summary
 Geometric Data - ma recherche s inscrit dans le contexte de l analyse exploratoire des donnees, dont l obj Input: point cloud equipped with a metric or (dis-)similarity measure data point image/patch,
Geometric Data - ma recherche s inscrit dans le contexte de l analyse exploratoire des donnees, dont l obj Input: point cloud equipped with a metric or (dis-)similarity measure data point image/patch,
Temperature Distribution Descriptor for Robust 3D Shape Retrieval
 Temperature Distribution Descriptor for Robust 3D Shape Retrieval Yi Fang Purdue University West Lafayette, IN, USA fang4@purdue.edu Mengtian Sun Purdue University West Lafayette, IN, USA sun84@purdue.edu
Temperature Distribution Descriptor for Robust 3D Shape Retrieval Yi Fang Purdue University West Lafayette, IN, USA fang4@purdue.edu Mengtian Sun Purdue University West Lafayette, IN, USA sun84@purdue.edu
Topology-Invariant Similarity and Diffusion Geometry
 1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
1.7.1 Laplacian Smoothing
 1.7.1 Laplacian Smoothing 320491: Advanced Graphics - Chapter 1 434 Theory Minimize energy functional total curvature estimate by polynomial-fitting non-linear (very slow!) 320491: Advanced Graphics -
1.7.1 Laplacian Smoothing 320491: Advanced Graphics - Chapter 1 434 Theory Minimize energy functional total curvature estimate by polynomial-fitting non-linear (very slow!) 320491: Advanced Graphics -
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Volumetric Heat Kernel Signatures
 Volumetric Heat Kernel Signatures ABSTRACT Dan Raviv Dept. of Computer Science, Technion Haifa, Israel darav@cs.technion.ac.il Alexander M. Bronstein Dept. of Electrical Engineering, Tel-Aviv Univ. Tel-Aviv,
Volumetric Heat Kernel Signatures ABSTRACT Dan Raviv Dept. of Computer Science, Technion Haifa, Israel darav@cs.technion.ac.il Alexander M. Bronstein Dept. of Electrical Engineering, Tel-Aviv Univ. Tel-Aviv,
AAM Based Facial Feature Tracking with Kinect
 BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
BULGARIAN ACADEMY OF SCIENCES CYBERNETICS AND INFORMATION TECHNOLOGIES Volume 15, No 3 Sofia 2015 Print ISSN: 1311-9702; Online ISSN: 1314-4081 DOI: 10.1515/cait-2015-0046 AAM Based Facial Feature Tracking
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Application questions. Theoretical questions
 The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
The oral exam will last 30 minutes and will consist of one application question followed by two theoretical questions. Please find below a non exhaustive list of possible application questions. The list
Shape Matching. Michael Kazhdan ( /657)
") Shape Matching Michael Kazhdan (601.457/657) Overview Intro General Approach Minimum SSD Descriptor Goal Given a database of 3D models, and given a query shape, find the database models that are most similar
Shape Matching Michael Kazhdan (601.457/657) Overview Intro General Approach Minimum SSD Descriptor Goal Given a database of 3D models, and given a query shape, find the database models that are most similar
Pattern Recognition 46 (2013) Contents lists available at SciVerse ScienceDirect. Pattern Recognition
 Contents lists available at SciVerse ScienceDirect. Pattern Recognition") Pattern Recognition 46 (2013) 449 461 Contents lists available at SciVerse ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr A comparison of methods for non-rigid 3D shape
Pattern Recognition 46 (2013) 449 461 Contents lists available at SciVerse ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr A comparison of methods for non-rigid 3D shape
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
3D from Photographs: Automatic Matching of Images. Dr Francesco Banterle
 3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
3D from Photographs: Automatic Matching of Images Dr Francesco Banterle francesco.banterle@isti.cnr.it 3D from Photographs Automatic Matching of Images Camera Calibration Photographs Surface Reconstruction
Tiling Three-Dimensional Space with Simplices. Shankar Krishnan AT&T Labs - Research
 Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
Tiling Three-Dimensional Space with Simplices Shankar Krishnan AT&T Labs - Research What is a Tiling? Partition of an infinite space into pieces having a finite number of distinct shapes usually Euclidean
VIDEO FACE BEAUTIFICATION
 VIDEO FACE BEAUTIFICATION Yajie Zhao 1, Xinyu Huang 2, Jizhou Gao 1, Alade Tokuta 2, Cha Zhang 3, Ruigang Yang 1 University of Kentucky 1 North Carolina Central University 2 Microsoft Research 3 Lexington,
VIDEO FACE BEAUTIFICATION Yajie Zhao 1, Xinyu Huang 2, Jizhou Gao 1, Alade Tokuta 2, Cha Zhang 3, Ruigang Yang 1 University of Kentucky 1 North Carolina Central University 2 Microsoft Research 3 Lexington,
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES
 A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES Jiale Wang *, Hongming Cai 2 and Yuanjun He * Department of Computer Science & Technology, Shanghai Jiaotong University, China Email: wjl8026@yahoo.com.cn
A METHOD FOR CONTENT-BASED SEARCHING OF 3D MODEL DATABASES Jiale Wang *, Hongming Cai 2 and Yuanjun He * Department of Computer Science & Technology, Shanghai Jiaotong University, China Email: wjl8026@yahoo.com.cn
Deep 3D Machine Learning for Reconstruction and Repair of 3D Surfaces
 Deep 3D Machine Learning for Reconstruction and Repair of 3D Surfaces TalkID 23152 This session will give the audience a quick overview of recent developments in the field of 3D surface analysis with deep
Deep 3D Machine Learning for Reconstruction and Repair of 3D Surfaces TalkID 23152 This session will give the audience a quick overview of recent developments in the field of 3D surface analysis with deep
Recognizing Deformable Shapes. Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital
 Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
arxiv: v1 [cs.cv] 29 Jan 2011
![arxiv: v1 [cs.cv] 29 Jan 2011](/thumbs/94/118769045.jpg "arxiv: v1 [cs.cv] 29 Jan 2011") A correspondence-less approach to matching of deformable shapes Jonathan Pokrass 1, Alexander M. Bronstein 1, and Michael M. Bronstein 2 1 Dept. of Electrical Engineering, Tel Aviv University, Israel evgenyfo@post.tau.ac.il,
A correspondence-less approach to matching of deformable shapes Jonathan Pokrass 1, Alexander M. Bronstein 1, and Michael M. Bronstein 2 1 Dept. of Electrical Engineering, Tel Aviv University, Israel evgenyfo@post.tau.ac.il,
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Benchmarks, Performance Evaluation and Contests for 3D Shape Retrieval
 Benchmarks, Performance Evaluation and Contests for 3D Shape Retrieval Afzal Godil 1, Zhouhui Lian 1, Helin Dutagaci 1, Rui Fang 2, Vanamali T.P. 1, Chun Pan Cheung 1 1 National Institute of Standards
Benchmarks, Performance Evaluation and Contests for 3D Shape Retrieval Afzal Godil 1, Zhouhui Lian 1, Helin Dutagaci 1, Rui Fang 2, Vanamali T.P. 1, Chun Pan Cheung 1 1 National Institute of Standards
Model-based segmentation and recognition from range data
 Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
Model-based segmentation and recognition from range data Jan Boehm Institute for Photogrammetry Universität Stuttgart Germany Keywords: range image, segmentation, object recognition, CAD ABSTRACT This
3D Shape Analysis for Quantification, Classification and Retrieval
 3D Shape Analysis for Quantification, Classification and Retrieval 3D Shape Analysis 3D mesh object 2D salient map 2D histogram GP tree Indriyati Atmosukarto PhD Defense Advisor: Prof Linda Shapiro General
3D Shape Analysis for Quantification, Classification and Retrieval 3D Shape Analysis 3D mesh object 2D salient map 2D histogram GP tree Indriyati Atmosukarto PhD Defense Advisor: Prof Linda Shapiro General
SHREC 13: Retrieval of objects captured with low-cost depth-sensing cameras
 Eurographics Workshop on 3D Object Retrieval (2013), pp. 1 7 U. Castellani, T. Schreck (Editors) SHREC 13: Retrieval of objects captured with low-cost depth-sensing cameras Mostafa Abdelrahman 6, Masaki
Eurographics Workshop on 3D Object Retrieval (2013), pp. 1 7 U. Castellani, T. Schreck (Editors) SHREC 13: Retrieval of objects captured with low-cost depth-sensing cameras Mostafa Abdelrahman 6, Masaki
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018
 CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
Global Shape Matching
 Global Shape Matching Section 3.2: Extrinsic Key Point Detection and Feature Descriptors 1 The story so far Problem statement Given pair of shapes/scans, find correspondences between the shapes Local shape
Global Shape Matching Section 3.2: Extrinsic Key Point Detection and Feature Descriptors 1 The story so far Problem statement Given pair of shapes/scans, find correspondences between the shapes Local shape
From Low-Cost Depth Sensors to CAD: Cross-Domain 3D Shape Retrieval via Regression Tree Fields
 From Low-Cost Depth Sensors to CAD: Cross-Domain 3D Shape Retrieval via Regression Tree Fields Yan Wang 1,JieFeng 2,ZhixiangWu 2, Jun Wang 3, and Shih-Fu Chang 1,2 1 Dept. of Electrical Engineering, Columbia
From Low-Cost Depth Sensors to CAD: Cross-Domain 3D Shape Retrieval via Regression Tree Fields Yan Wang 1,JieFeng 2,ZhixiangWu 2, Jun Wang 3, and Shih-Fu Chang 1,2 1 Dept. of Electrical Engineering, Columbia
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
CS5670: Computer Vision Noah Snavely Lecture 4: Harris corner detection Szeliski: 4.1 Reading Announcements Project 1 (Hybrid Images) code due next Wednesday, Feb 14, by 11:59pm Artifacts due Friday, Feb
Data fusion and multi-cue data matching using diffusion maps
 Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
374 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 14, NO. 2, APRIL 2012
 374 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 14, NO. 2, APRIL 2012 Investigating the Effects of Multiple Factors Towards More Accurate 3-D Object Retrieval Petros Daras, Member, IEEE, Apostolos Axenopoulos,
374 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 14, NO. 2, APRIL 2012 Investigating the Effects of Multiple Factors Towards More Accurate 3-D Object Retrieval Petros Daras, Member, IEEE, Apostolos Axenopoulos,
Multi-Scale Free-Form Surface Description
 Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Including the Size of Regions in Image Segmentation by Region Based Graph
 International Journal of Emerging Engineering Research and Technology Volume 3, Issue 4, April 2015, PP 81-85 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) Including the Size of Regions in Image Segmentation
International Journal of Emerging Engineering Research and Technology Volume 3, Issue 4, April 2015, PP 81-85 ISSN 2349-4395 (Print) & ISSN 2349-4409 (Online) Including the Size of Regions in Image Segmentation
An Introduction to Content Based Image Retrieval
 CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter