Preparation Meeting. Recent Advances in the Analysis of 3D Shapes. Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers
|
|
|
- Dominick Lawson
- 5 years ago
- Views:
Transcription
1 Preparation Meeting Recent Advances in the Analysis of 3D Shapes Emanuele Rodolà Matthias Vestner Thomas Windheuser Daniel Cremers

2 What You Will Learn in the Seminar Get an overview on state of the art research in 3D shape analysis Be able to read and understand scientific publications Prepare and give a talk Write a scientific report



3 Preparation Please do not work on your topic completely alone Meet at least twice with your supervisor 2 x Deliver the report and discuss the slides with your supervisor

4 Presentation slides (ca. 1-2 minutes per slide) Do not put too much information on the slides Recommended structure 1. Introduction, problem motivation, outline 2. Approach [3. Experimental Results] 4. Discussion 5. Summary (of scientific contributions)


5 Report Overview and main contributions of the assigned topic 6-10 pages Latex template available on the web page



6 Evaluation Criteria Attendance at each appointment is necessary Notice that many papers are not completely self-contained It may be important to check related articles or text books Report should be more detailed than original paper Own implementations and graphics (where feasible) are appreciated
7 Typical Problems in 3D shape analysis





8 Typical problems Correspondence Partial similarity Symmetry Representation





9 Typical problems Analysis of shape collections Feature detection Segmentation Description




10 Tools Linear algebra Metric spaces Optimization Differential geometry
11 Overview of Available Topics



12 Laplace-Beltrami Operator One of the key tools for 3D shape analysis Mathematical Background and Discretizations Two talks

13 Robust Region Detection via Consensus Segmentation of Deformable Shapes Detection of regions that are stable under many deformations Semantically meaningful segmentation Based on unsupervised learning
 symmetry Uses a volumetric representation of the")
14 Probably approximately symmetric: Fast rigid symmetry detection with global guarantees Global symmetry detection in 3D shapes Theoretical guarantees to find the best (approximate) symmetry Uses a volumetric representation of the shapes

15 Global intrinsic symmetries of shapes Global symmetry detection when the shapes are allowed to deform Based on properties of the Laplace- Beltrami operator Formulated as a matching problem between the shape and itself


16 Scale-invariant heat kernel signatures for nonrigid shape recognition Pointwise feature descriptor Invariant to big class of deformations Based on heat diffusion and Fourier transform of the descriptor space


17 Geodesics in heat: A new approach to computing distance based on heat flow A method to compute geodesic distances based on heat diffusion An order of magnitude faster than state of the art Applicable to polygonal meshes, point clouds, as well as other representations

")


18 Intrinsic metric (distance function) More robust to noise than geodesic distance Biharmonic Distance


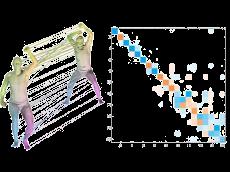
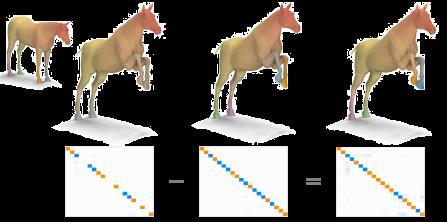
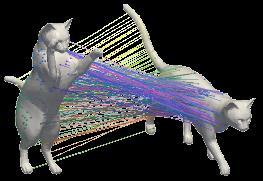
19 Functional Maps: A Flexible Representation of Maps Between Shapes Consider correspondences as linear operators Compact representation Related to Fourier analysis on manifolds =



20 Coupled quasi-harmonic bases Interclass matching Learning the best functional bases for a given pair of shapes

21 Compressed manifold modes for mesh processing Locally supported quasi-harmonic bases Allows to identify key features of the shape Shapes as collections of parts Enables several applications (segmentation, etc.)



22 Dense non-rigid shape correspondence using random forests Apply random forests to perform shape matching Allows faster matching times General framework for inter-class matching


23 Supervised learning of bag-of-features shape descriptors using sparse coding Dictionary learning for shape retrieval (supervised learning) Provides a global shape descriptor that is fast to evaluate and compare State of the art retrieval

24 Consistent Shape Maps via Semidefinite Programming Analysis of shape collections Consistently matching all shapes in a given collection starting from input maps Theoretical guarantees in presence of noisy input

25 Cross-Collection Map Inference by Intrinsic Alignment of Shape Spaces Analysis of shape collections Given two shape collections with similar structure, match the two collections Uses functional maps


26 Bilateral Maps for Partial Matching Define shape descriptors for pairs of points instead of individual points Allows to do partial matching Robustness to topological changes



27 Optimal Intrinsic Descriptors for Non-Rigid Shape Analysis Supervised learning of optimal point descriptor Optimizing in infinitedimensional space Best possible parametrization for existing descriptors

28 Exploring the geometry of the space of shells Shapes as points in a space of shapes Geodesics in this space correspond to deformations between shapes Possible to interpolate / extrapolate shapes by walking on geodesics



29 A Low-Dimensional Representation for Robust Partial Isometric Correspondences Computation Partial isometric matching Matching points and local coordinate system Robust to topological noise State of the art on real world data
Geodesics in heat: A new approach to computing distance
 Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures
 Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures Anastasia Dubrovina Technion Israel Institute of Technology Introduction Correspondence detection
Non-rigid shape correspondence by matching semi-local spectral features and global geodesic structures Anastasia Dubrovina Technion Israel Institute of Technology Introduction Correspondence detection
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I)
") Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Topology-Invariant Similarity and Diffusion Geometry
 1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
1 Topology-Invariant Similarity and Diffusion Geometry Lecture 7 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Intrinsic
Data fusion and multi-cue data matching using diffusion maps
 Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Data fusion and multi-cue data matching using diffusion maps Stéphane Lafon Collaborators: Raphy Coifman, Andreas Glaser, Yosi Keller, Steven Zucker (Yale University) Part of this work was supported by
Geometric Data. Goal: describe the structure of the geometry underlying the data, for interpretation or summary
 Geometric Data - ma recherche s inscrit dans le contexte de l analyse exploratoire des donnees, dont l obj Input: point cloud equipped with a metric or (dis-)similarity measure data point image/patch,
Geometric Data - ma recherche s inscrit dans le contexte de l analyse exploratoire des donnees, dont l obj Input: point cloud equipped with a metric or (dis-)similarity measure data point image/patch,
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction
 Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Semi-Supervised Hierarchical Models for 3D Human Pose Reconstruction Atul Kanaujia, CBIM, Rutgers Cristian Sminchisescu, TTI-C Dimitris Metaxas,CBIM, Rutgers 3D Human Pose Inference Difficulties Towards
Manifold Learning Theory and Applications
 Manifold Learning Theory and Applications Yunqian Ma and Yun Fu CRC Press Taylor Si Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an informa business Contents
Manifold Learning Theory and Applications Yunqian Ma and Yun Fu CRC Press Taylor Si Francis Group Boca Raton London New York CRC Press is an imprint of the Taylor & Francis Group, an informa business Contents
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Survey of the Mathematics of Big Data
 Survey of the Mathematics of Big Data Issues with Big Data, Mathematics to the Rescue Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Math & Big Data Fall 2015 1 / 28 Introduction We survey some
Survey of the Mathematics of Big Data Issues with Big Data, Mathematics to the Rescue Philippe B. Laval KSU Fall 2015 Philippe B. Laval (KSU) Math & Big Data Fall 2015 1 / 28 Introduction We survey some
Detection and Characterization of Intrinsic Symmetry of 3D Shapes
 Detection and Characterization of Intrinsic Symmetry of 3D Shapes Anirban Mukhopadhyay Suchendra M. Bhandarkar Fatih Porikli Department of Visual Data Analysis, Zuse Institute Berlin, Berlin, Germany Department
Detection and Characterization of Intrinsic Symmetry of 3D Shapes Anirban Mukhopadhyay Suchendra M. Bhandarkar Fatih Porikli Department of Visual Data Analysis, Zuse Institute Berlin, Berlin, Germany Department
Discrete Differential Geometry. Differential Geometry
 Discrete Differential Geometry Yiying Tong CSE 891 Sect 004 Differential Geometry Why do we care? theory: special surfaces minimal, CMC, integrable, etc. computation: simulation/processing Grape (u. of
Discrete Differential Geometry Yiying Tong CSE 891 Sect 004 Differential Geometry Why do we care? theory: special surfaces minimal, CMC, integrable, etc. computation: simulation/processing Grape (u. of
Stable and Multiscale Topological Signatures
 Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Shape Matching for 3D Retrieval and Recognition. Agenda. 3D collections. Ivan Sipiran and Benjamin Bustos
 Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
Dense Non-Rigid Shape Correspondence using Random Forests
 Dense Non-Rigid Shape Correspondence using Random Forests Emanuele Rodolà TU München rodola@in.tum.de Samuel Rota Bulò Fondazione Bruno Kessler Matthias Vestner TU München vestner@in.tum.de rotabulo@fbk.eu
Dense Non-Rigid Shape Correspondence using Random Forests Emanuele Rodolà TU München rodola@in.tum.de Samuel Rota Bulò Fondazione Bruno Kessler Matthias Vestner TU München vestner@in.tum.de rotabulo@fbk.eu
Computational QC Geometry: A tool for Medical Morphometry, Computer Graphics & Vision
 Computational QC Geometry: A tool for Medical Morphometry, Computer Graphics & Vision Part II of the sequel of 2 talks. Computation C/QC geometry was presented by Tony F. Chan Ronald Lok Ming Lui Department
Computational QC Geometry: A tool for Medical Morphometry, Computer Graphics & Vision Part II of the sequel of 2 talks. Computation C/QC geometry was presented by Tony F. Chan Ronald Lok Ming Lui Department
MPEG-7 Visual shape descriptors
 MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
RELATIVE SCALE ESTIMATION AND 3D REGISTRATION OF MULTI-MODAL GEOMETRY USING GROWING LEAST SQUARES
 RELATIVE SCALE ESTIMATION AND 3D REGISTRATION OF MULTI-MODAL GEOMETRY USING GROWING LEAST SQUARES Nicolas Mellado Matteo Dellepiane Université de Toulouse University College London Visual Computing Lab,
RELATIVE SCALE ESTIMATION AND 3D REGISTRATION OF MULTI-MODAL GEOMETRY USING GROWING LEAST SQUARES Nicolas Mellado Matteo Dellepiane Université de Toulouse University College London Visual Computing Lab,
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 COURSE NOTES Organizers & Lecturers: Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 COURSE NOTES Organizers & Lecturers: Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas
A Segmentation of Non-rigid Shape with Heat Diffuse
 2012 4th International Conference on Signal Processing Systems (ICSPS 2012) IPCSIT vol. 58 (2012) (2012) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.2012.V58.6 A Segmentation of Non-rigid Shape with Heat
2012 4th International Conference on Signal Processing Systems (ICSPS 2012) IPCSIT vol. 58 (2012) (2012) IACSIT Press, Singapore DOI: 10.7763/IPCSIT.2012.V58.6 A Segmentation of Non-rigid Shape with Heat
Mathematical Tools for 3D Shape Analysis and Description
 outline Mathematical Tools for 3D Shape Analysis and Description SGP 2013 Graduate School Silvia Biasotti, Andrea Cerri, Michela Spagnuolo Istituto di Matematica Applicata e Tecnologie Informatiche E.
outline Mathematical Tools for 3D Shape Analysis and Description SGP 2013 Graduate School Silvia Biasotti, Andrea Cerri, Michela Spagnuolo Istituto di Matematica Applicata e Tecnologie Informatiche E.
Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts
 Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts Reed M. Williams and Horea T. Ilieş Department of Mechanical Engineering University of Connecticut Storrs, CT
Towards Multi-scale Heat Kernel Signatures for Point Cloud Models of Engineering Artifacts Reed M. Williams and Horea T. Ilieş Department of Mechanical Engineering University of Connecticut Storrs, CT
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
The correspondence problem. A classic problem. A classic problem. Deformation-Drive Shape Correspondence. Fundamental to geometry processing
 The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
Justin Solomon MIT, Spring
 Justin Solomon MIT, Spring 2017 http://www.gogeometry.com Instructor: Justin Solomon Email: jsolomon@mit.edu Office: 32-D460 Office hours: Wednesdays, 1pm-3pm Geometric Data Processing
Justin Solomon MIT, Spring 2017 http://www.gogeometry.com Instructor: Justin Solomon Email: jsolomon@mit.edu Office: 32-D460 Office hours: Wednesdays, 1pm-3pm Geometric Data Processing
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH ASIA 2016 COURSE NOTES Organizers & Lecturers: Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen,
Computing and Processing Correspondences with Functional Maps SIGGRAPH ASIA 2016 COURSE NOTES Organizers & Lecturers: Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen,
Discovering Similarities in 3D Data
 Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Discovering Similarities in 3D Data Vladimir Kim, Tianqiang Liu, Sid Chaudhuri, Steve Diverdi, Wilmot Li, Niloy Mitra, Yaron Lipman, Thomas Funkhouser Motivation 3D data is widely available Medicine Mechanical
Algorithms for 3D Isometric Shape Correspondence
 Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Algorithms for 3D Isometric Shape Correspondence Yusuf Sahillioğlu Computer Eng. Dept., Koç University, Istanbul, Turkey (PhD) Computer Eng. Dept., METU, Ankara, Turkey (Asst. Prof.) 2 / 53 Problem Definition
Polygonal Meshes. Thomas Funkhouser Princeton University COS 526, Fall 2016
 Polygonal Meshes Thomas Funkhouser Princeton University COS 526, Fall 2016 Digital Geometry Processing Processing of 3D surfaces Creation, acquisition Storage, transmission Editing, animation, simulation
Polygonal Meshes Thomas Funkhouser Princeton University COS 526, Fall 2016 Digital Geometry Processing Processing of 3D surfaces Creation, acquisition Storage, transmission Editing, animation, simulation
Deformation II. Disney/Pixar
 Deformation II Disney/Pixar 1 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 2 Motivation Can be applied to any
Deformation II Disney/Pixar 1 Space Deformation Deformation function on ambient space f : n n Shape S deformed by applying f to points of S S = f (S) f (x,y)=(2x,y) S S 2 Motivation Can be applied to any
Functional Maps: A Flexible Representation of Maps Between Shapes
 Functional aps: A Flexible Representation of aps Between Shapes aks Ovsjanikov irela Ben-Chen Justin Solomon Adrian Butscher Leonidas Guibas LIX, École Polytechnique Stanford University Figure 1: Horse
Functional aps: A Flexible Representation of aps Between Shapes aks Ovsjanikov irela Ben-Chen Justin Solomon Adrian Butscher Leonidas Guibas LIX, École Polytechnique Stanford University Figure 1: Horse
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Writing a good seminar paper Seminar in Software and Service Engineering
 Writing a good seminar paper Seminar in Software and Service Engineering 24.10.2017 Marjo Kauppinen and Marko Nieminen Department of Computer Science Outline Learning goals of the course Structure of good
Writing a good seminar paper Seminar in Software and Service Engineering 24.10.2017 Marjo Kauppinen and Marko Nieminen Department of Computer Science Outline Learning goals of the course Structure of good
Shape Modeling with Point-Sampled Geometry
 Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Shape Modeling with Point-Sampled Geometry Mark Pauly Richard Keiser Leif Kobbelt Markus Gross ETH Zürich ETH Zürich RWTH Aachen ETH Zürich Motivation Surface representations Explicit surfaces (B-reps)
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Computational Design. Stelian Coros
 Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
Computational Design Stelian Coros Schedule for presentations February 3 5 10 12 17 19 24 26 March 3 5 10 12 17 19 24 26 30 April 2 7 9 14 16 21 23 28 30 Send me: ASAP: 3 choices for dates + approximate
A Fully Hierarchical Approach for Finding Correspondences in Non-rigid Shapes
 A Fully Hierarchical Approach for Finding Correspondences in Non-rigid Shapes Ivan Sipiran 1 and Benjamin Bustos 2 1 Department of Computer and Information Science, University of Konstanz 2 Department
A Fully Hierarchical Approach for Finding Correspondences in Non-rigid Shapes Ivan Sipiran 1 and Benjamin Bustos 2 1 Department of Computer and Information Science, University of Konstanz 2 Department
A Primer on Laplacians. Max Wardetzky. Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany
 A Primer on Laplacians Max Wardetzky Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany Warm-up: Euclidean case Warm-up The Euclidean case Chladni s vibrating plates
A Primer on Laplacians Max Wardetzky Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany Warm-up: Euclidean case Warm-up The Euclidean case Chladni s vibrating plates
Research in Computational Differential Geomet
 Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Research in Computational Differential Geometry November 5, 2014 Approximations Often we have a series of approximations which we think are getting close to looking like some shape. Approximations Often
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
PHOG:Photometric and geometric functions for textured shape retrieval. Presentation by Eivind Kvissel
 PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
PHOG:Photometric and geometric functions for textured shape retrieval Presentation by Eivind Kvissel Introduction This paper is about tackling the issue of textured 3D object retrieval. Thanks to advances
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
Finding Structure in Large Collections of 3D Models
 Finding Structure in Large Collections of 3D Models Vladimir Kim Adobe Research Motivation Explore, Analyze, and Create Geometric Data Real Virtual Motivation Explore, Analyze, and Create Geometric Data
Finding Structure in Large Collections of 3D Models Vladimir Kim Adobe Research Motivation Explore, Analyze, and Create Geometric Data Real Virtual Motivation Explore, Analyze, and Create Geometric Data
Computer Graphics Curves and Surfaces. Matthias Teschner
 Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
Computer Graphics Curves and Surfaces Matthias Teschner Outline Introduction Polynomial curves Bézier curves Matrix notation Curve subdivision Differential curve properties Piecewise polynomial curves
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Bounded Distortion Mapping and Shape Deformation
 Bounded Distortion Mapping and Shape Deformation 陈仁杰 德国马克斯普朗克计算机研究所 GAMES Web Seminar, 29 March 2018 Outline Planar Mapping & Applications Bounded Distortion Mapping Harmonic Shape Deformation Shape Interpolation
Bounded Distortion Mapping and Shape Deformation 陈仁杰 德国马克斯普朗克计算机研究所 GAMES Web Seminar, 29 March 2018 Outline Planar Mapping & Applications Bounded Distortion Mapping Harmonic Shape Deformation Shape Interpolation
Invariant shape similarity. Invariant shape similarity. Invariant similarity. Equivalence. Equivalence. Equivalence. Equal SIMILARITY TRANSFORMATION
 1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
1 Invariant shape similarity Alexer & Michael Bronstein, 2006-2009 Michael Bronstein, 2010 tosca.cs.technion.ac.il/book 2 Invariant shape similarity 048921 Advanced topics in vision Processing Analysis
Geometric Registration for Deformable Shapes 2.2 Deformable Registration
 Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
Geometric Registration or Deormable Shapes 2.2 Deormable Registration Variational Model Deormable ICP Variational Model What is deormable shape matching? Example? What are the Correspondences? Eurographics
arxiv: v1 [cs.gr] 28 Sep 2013
![arxiv: v1 [cs.gr] 28 Sep 2013](/thumbs/92/108326442.jpg "arxiv: v1 [cs.gr] 28 Sep 2013") Detection and Characterization of Intrinsic Symmetry ANIRBAN MUKHOPADHYAY and SUCHENDRA M. BHANDARKAR Department of Computer Science, The University of Georgia, Athens, GA 30602-7404, USA and FATIH PORIKLI
Detection and Characterization of Intrinsic Symmetry ANIRBAN MUKHOPADHYAY and SUCHENDRA M. BHANDARKAR Department of Computer Science, The University of Georgia, Athens, GA 30602-7404, USA and FATIH PORIKLI
ECS289: Scalable Machine Learning
 ECS289: Scalable Machine Learning Cho-Jui Hsieh UC Davis Sept 22, 2016 Course Information Website: http://www.stat.ucdavis.edu/~chohsieh/teaching/ ECS289G_Fall2016/main.html My office: Mathematical Sciences
ECS289: Scalable Machine Learning Cho-Jui Hsieh UC Davis Sept 22, 2016 Course Information Website: http://www.stat.ucdavis.edu/~chohsieh/teaching/ ECS289G_Fall2016/main.html My office: Mathematical Sciences
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Introduc1on to Computa1onal Manifolds and Applica1ons
 Trimester Program on Computa1onal Manifolds and Applica1ons Introduc1on to Computa1onal Manifolds and Applica1ons Manifold Harmonics Luis Gustavo Nonato Depto Matemá3ca Aplicada e Esta9s3ca ICMC- USP-
Trimester Program on Computa1onal Manifolds and Applica1ons Introduc1on to Computa1onal Manifolds and Applica1ons Manifold Harmonics Luis Gustavo Nonato Depto Matemá3ca Aplicada e Esta9s3ca ICMC- USP-
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Specification and Computation of Warping and Morphing Transformations. Bruno Costa da Silva Microsoft Corp.
 Specification and Computation of Warping and Morphing Transformations Bruno Costa da Silva Microsoft Corp. Morphing Transformations Representation of Transformations Specification of Transformations Specification
Specification and Computation of Warping and Morphing Transformations Bruno Costa da Silva Microsoft Corp. Morphing Transformations Representation of Transformations Specification of Transformations Specification
Topological Data Analysis
 Topological Data Analysis A Framework for Machine Learning Samarth Bansal (11630) Deepak Choudhary (11234) Motivation Ayasdi was started in 2008 to bring a groundbreaking new approach to solving the world
Topological Data Analysis A Framework for Machine Learning Samarth Bansal (11630) Deepak Choudhary (11234) Motivation Ayasdi was started in 2008 to bring a groundbreaking new approach to solving the world
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018
 CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
CS233: The Shape of Data Handout # 3 Geometric and Topological Data Analysis Stanford University Wednesday, 9 May 2018 Homework #3 v4: Shape correspondences, shape matching, multi-way alignments. [100
Representing 3D models for alignment and recognition
 Representing 3D models for alignment and recognition Mathieu Aubry To cite this version: Mathieu Aubry. Representing 3D models for alignment and recognition. Computer Vision and Pattern Recognition [cs.cv].
Representing 3D models for alignment and recognition Mathieu Aubry To cite this version: Mathieu Aubry. Representing 3D models for alignment and recognition. Computer Vision and Pattern Recognition [cs.cv].
Hierarchical matching of non-rigid shapes
 Hierarchical matching of non-rigid shapes Dan Raviv, Anastasia Dubrovina, and Ron Kimmel Technion - Israel Institute of Technology Abstract. Detecting similarity between non-rigid shapes is one of the
Hierarchical matching of non-rigid shapes Dan Raviv, Anastasia Dubrovina, and Ron Kimmel Technion - Israel Institute of Technology Abstract. Detecting similarity between non-rigid shapes is one of the
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
Seeing the unseen. Data-driven 3D Understanding from Single Images. Hao Su
 Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Seeing the unseen Data-driven 3D Understanding from Single Images Hao Su Image world Shape world 3D perception from a single image Monocular vision a typical prey a typical predator Cited from https://en.wikipedia.org/wiki/binocular_vision
Improving Shape retrieval by Spectral Matching and Meta Similarity
 1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
Homeomorphic Manifold Analysis (HMA): Generalized Separation of Style and Content on Manifolds
: Generalized Separation of Style and Content on Manifolds") Homeomorphic Manifold Analysis (HMA): Generalized Separation of Style and Content on Manifolds Ahmed Elgammal a,,, Chan-Su Lee b a Department of Computer Science, Rutgers University, Frelinghuysen Rd,
Homeomorphic Manifold Analysis (HMA): Generalized Separation of Style and Content on Manifolds Ahmed Elgammal a,,, Chan-Su Lee b a Department of Computer Science, Rutgers University, Frelinghuysen Rd,
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. UW EE
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
1. Compare and order real numbers.
 7A Numbers and Operations 1. Demonstrate an numbers, ways of representing numbers, relationships among numbers and number systems. 2. Compute accurately and fluently and make reasonable estimates. a. Represent
7A Numbers and Operations 1. Demonstrate an numbers, ways of representing numbers, relationships among numbers and number systems. 2. Compute accurately and fluently and make reasonable estimates. a. Represent
Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors
 Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors Master thesis Nikita Araslanov Compute Science Institute VI University of Bonn March 29, 2016 Nikita
Efficient 3D shape co-segmentation from single-view point clouds using appearance and isometry priors Master thesis Nikita Araslanov Compute Science Institute VI University of Bonn March 29, 2016 Nikita
Simulation in Computer Graphics. Introduction. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Introduction Matthias Teschner Computer Science Department University of Freiburg Contact Matthias Teschner Computer Graphics University of Freiburg Georges-Koehler-Allee
Simulation in Computer Graphics Introduction Matthias Teschner Computer Science Department University of Freiburg Contact Matthias Teschner Computer Graphics University of Freiburg Georges-Koehler-Allee
Mirror-symmetry in images and 3D shapes
 Journées de Géométrie Algorithmique CIRM Luminy 2013 Mirror-symmetry in images and 3D shapes Viorica Pătrăucean Geometrica, Inria Saclay Symmetry is all around... In nature: mirror, rotational, helical,
Journées de Géométrie Algorithmique CIRM Luminy 2013 Mirror-symmetry in images and 3D shapes Viorica Pătrăucean Geometrica, Inria Saclay Symmetry is all around... In nature: mirror, rotational, helical,
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Shape analysis through geometric distributions
 Shape analysis through geometric distributions Nicolas Charon (CIS, Johns Hopkins University) joint work with B. Charlier (Université de Montpellier), I. Kaltenmark (CMLA), A. Trouvé, Hsi-Wei Hsieh (JHU)...
Shape analysis through geometric distributions Nicolas Charon (CIS, Johns Hopkins University) joint work with B. Charlier (Université de Montpellier), I. Kaltenmark (CMLA), A. Trouvé, Hsi-Wei Hsieh (JHU)...
A Gromov-Hausdorff framework with diffusion geometry for topologically-robust non-rigid shape matching
 International Journal of Computer Vision manuscript No. (will be inserted by the editor) A Gromov-Hausdorff framework with diffusion geometry for topologically-robust non-rigid shape matching Alexander
International Journal of Computer Vision manuscript No. (will be inserted by the editor) A Gromov-Hausdorff framework with diffusion geometry for topologically-robust non-rigid shape matching Alexander
The p-laplacian on Graphs with Applications in Image Processing and Classification
 The p-laplacian on Graphs with Applications in Image Processing and Classification Abderrahim Elmoataz 1,2, Matthieu Toutain 1, Daniel Tenbrinck 3 1 UMR6072 GREYC, Université de Caen Normandie 2 Université
The p-laplacian on Graphs with Applications in Image Processing and Classification Abderrahim Elmoataz 1,2, Matthieu Toutain 1, Daniel Tenbrinck 3 1 UMR6072 GREYC, Université de Caen Normandie 2 Université
Surfaces: notes on Geometry & Topology
 Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Surfaces: notes on Geometry & Topology 1 Surfaces A 2-dimensional region of 3D space A portion of space having length and breadth but no thickness 2 Defining Surfaces Analytically... Parametric surfaces
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Non-rigid shape correspondence using pointwise surface descriptors and metric structures
 Non-rigid shape correspondence using pointwise surface descriptors and metric structures Anastasia Dubrovina, Dan Raviv and Ron Kimmel Abstract Finding a correspondence between two non-rigid shapes is
Non-rigid shape correspondence using pointwise surface descriptors and metric structures Anastasia Dubrovina, Dan Raviv and Ron Kimmel Abstract Finding a correspondence between two non-rigid shapes is
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction
 Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Face Recognition At-a-Distance Based on Sparse-Stereo Reconstruction Ham Rara, Shireen Elhabian, Asem Ali University of Louisville Louisville, KY {hmrara01,syelha01,amali003}@louisville.edu Mike Miller,
Research Article Polygon Morphing and Its Application in Orebody Modeling
 Mathematical Problems in Engineering Volume 212, Article ID 732365, 9 pages doi:1.1155/212/732365 Research Article Polygon Morphing and Its Application in Orebody Modeling Hacer İlhan and Haşmet Gürçay
Mathematical Problems in Engineering Volume 212, Article ID 732365, 9 pages doi:1.1155/212/732365 Research Article Polygon Morphing and Its Application in Orebody Modeling Hacer İlhan and Haşmet Gürçay
VISUALIZING INTRINSIC ISOSURFACE VARIATION DUE TO UNCERTAINTY THROUGH HEAT KERNEL SIGNATURES
 VISUALIZING INTRINSIC ISOSURFACE VARIATION DUE TO UNCERTAINTY THROUGH HEAT KERNEL SIGNATURES by Nazmus Saquib A thesis submitted to the faculty of The University of Utah in partial fulfillment of the requirements
VISUALIZING INTRINSIC ISOSURFACE VARIATION DUE TO UNCERTAINTY THROUGH HEAT KERNEL SIGNATURES by Nazmus Saquib A thesis submitted to the faculty of The University of Utah in partial fulfillment of the requirements
Gaussian and Mean Curvature Planar points: Zero Gaussian curvature and zero mean curvature Tangent plane intersects surface at infinity points Gauss C
 Outline Shape Analysis Basics COS 526, Fall 21 Curvature PCA Distance Features Some slides from Rusinkiewicz Curvature Curvature Curvature κof a curve is reciprocal of radius of circle that best approximates
Outline Shape Analysis Basics COS 526, Fall 21 Curvature PCA Distance Features Some slides from Rusinkiewicz Curvature Curvature Curvature κof a curve is reciprocal of radius of circle that best approximates
Learning High-Level Feature by Deep Belief Networks for 3-D Model Retrieval and Recognition
 2154 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 16, NO. 8, DECEMBER 2014 Learning High-Level Feature by Deep Belief Networks for 3-D Model Retrieval and Recognition Shuhui Bu, Member, IEEE, Zhenbao Liu, Member,
2154 IEEE TRANSACTIONS ON MULTIMEDIA, VOL. 16, NO. 8, DECEMBER 2014 Learning High-Level Feature by Deep Belief Networks for 3-D Model Retrieval and Recognition Shuhui Bu, Member, IEEE, Zhenbao Liu, Member,
Assoc. Prof. Yusuf Sahillioğlu
 Assoc. Prof. Yusuf Sahillioğlu Middle East Technical University (METU) Computer Engineering Dept. Universiteler Mah. Dumlupinar Blv. No:1 Ankara 06800 Turkey Phone: +90 312 210 5563 Fax: +90 312 210 5544
Assoc. Prof. Yusuf Sahillioğlu Middle East Technical University (METU) Computer Engineering Dept. Universiteler Mah. Dumlupinar Blv. No:1 Ankara 06800 Turkey Phone: +90 312 210 5563 Fax: +90 312 210 5544
Learning Similarities for Rigid and Non-Rigid Object Detection
 Learning Similarities for Rigid and Non-Rigid Object Detection Asako Kanezaki The Univ. of Tokyo Emanuele Rodolà TU Munich Daniel Cremers TU Munich Tatsuya Harada The Univ. of Tokyo Abstract In this paper,
Learning Similarities for Rigid and Non-Rigid Object Detection Asako Kanezaki The Univ. of Tokyo Emanuele Rodolà TU Munich Daniel Cremers TU Munich Tatsuya Harada The Univ. of Tokyo Abstract In this paper,
Characterizing Shape Using Conformal Factors
 Eurographics Workshop on 3D Object Retrieval (28) I. Pratikakis and T. Theoharis (Editors) Characterizing Shape Using Conformal Factors Mirela Ben-Chen and Craig Gotsman Technion Israel Institute of Technology
Eurographics Workshop on 3D Object Retrieval (28) I. Pratikakis and T. Theoharis (Editors) Characterizing Shape Using Conformal Factors Mirela Ben-Chen and Craig Gotsman Technion Israel Institute of Technology
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Morphometric Analysis of Biomedical Images. Sara Rolfe 10/9/17
 Morphometric Analysis of Biomedical Images Sara Rolfe 10/9/17 Morphometric Analysis of Biomedical Images Object surface contours Image difference features Compact representation of feature differences
Morphometric Analysis of Biomedical Images Sara Rolfe 10/9/17 Morphometric Analysis of Biomedical Images Object surface contours Image difference features Compact representation of feature differences
Module: 2 Finite Element Formulation Techniques Lecture 3: Finite Element Method: Displacement Approach
 11 Module: 2 Finite Element Formulation Techniques Lecture 3: Finite Element Method: Displacement Approach 2.3.1 Choice of Displacement Function Displacement function is the beginning point for the structural
11 Module: 2 Finite Element Formulation Techniques Lecture 3: Finite Element Method: Displacement Approach 2.3.1 Choice of Displacement Function Displacement function is the beginning point for the structural
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
12 - Spatial And Skeletal Deformations. CSCI-GA Computer Graphics - Fall 16 - Daniele Panozzo
 12 - Spatial And Skeletal Deformations Space Deformations Space Deformation Displacement function defined on the ambient space Evaluate the function on the points of the shape embedded in the space Twist
12 - Spatial And Skeletal Deformations Space Deformations Space Deformation Displacement function defined on the ambient space Evaluate the function on the points of the shape embedded in the space Twist
Modeling and Analyzing 3D Shapes using Clues from 2D Images. Minglun Gong Dept. of CS, Memorial Univ.
 Modeling and Analyzing 3D Shapes using Clues from 2D Images Minglun Gong Dept. of CS, Memorial Univ. Modeling Flowers from Images Reconstructing 3D flower petal shapes from a single image is difficult
Modeling and Analyzing 3D Shapes using Clues from 2D Images Minglun Gong Dept. of CS, Memorial Univ. Modeling Flowers from Images Reconstructing 3D flower petal shapes from a single image is difficult
Statistics and Information Technology
 Statistics and Information Technology Werner Stuetzle Professor and Chair, Statistics Adjunct Professor, Computer Science and Engineering University of Washington Prepared for NSF Workshop on Statistics:
Statistics and Information Technology Werner Stuetzle Professor and Chair, Statistics Adjunct Professor, Computer Science and Engineering University of Washington Prepared for NSF Workshop on Statistics:
Multi-Scale Free-Form Surface Description
 Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Multi-Scale Free-Form Surface Description Farzin Mokhtarian, Nasser Khalili and Peter Yuen Centre for Vision Speech and Signal Processing Dept. of Electronic and Electrical Engineering University of Surrey,
Kernel Methods for Topological Data Analysis
 Kernel Methods for Topological Data Analysis Toward Topological Statistics Kenji Fukumizu The Institute of Statistical Mathematics (Tokyo Japan) Joint work with Genki Kusano and Yasuaki Hiraoka (Tohoku
Kernel Methods for Topological Data Analysis Toward Topological Statistics Kenji Fukumizu The Institute of Statistical Mathematics (Tokyo Japan) Joint work with Genki Kusano and Yasuaki Hiraoka (Tohoku
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS
 CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
CHAPTER 6 PERCEPTUAL ORGANIZATION BASED ON TEMPORAL DYNAMICS This chapter presents a computational model for perceptual organization. A figure-ground segregation network is proposed based on a novel boundary
Parameterization of Meshes
 2-Manifold Parameterization of Meshes What makes for a smooth manifold? locally looks like Euclidian space collection of charts mutually compatible on their overlaps form an atlas Parameterizations are
2-Manifold Parameterization of Meshes What makes for a smooth manifold? locally looks like Euclidian space collection of charts mutually compatible on their overlaps form an atlas Parameterizations are
Matching and Recognition in 3D. Based on slides by Tom Funkhouser and Misha Kazhdan
 Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Matching and Recognition in 3D Based on slides by Tom Funkhouser and Misha Kazhdan From 2D to 3D: Some Things Easier No occlusion (but sometimes missing data instead) Segmenting objects often simpler From
Finding Surface Correspondences With Shape Analysis
 Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation
Finding Surface Correspondences With Shape Analysis Sid Chaudhuri, Steve Diverdi, Maciej Halber, Vladimir Kim, Yaron Lipman, Tianqiang Liu, Wilmot Li, Niloy Mitra, Elena Sizikova, Thomas Funkhouser Motivation