Recognizing Deformable Shapes. Salvador Ruiz Correa (CSE/EE576 Computer Vision I)
|
|
|
- Philip Webster
- 5 years ago
- Views:
Transcription
1 Recognizing Deformable Shapes Salvador Ruiz Correa (CSE/EE576 Computer Vision I)


2 Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data. 3-D D Laser Scanner Range data (Cloud of 3-D D points) Post- processing 3-D D Output Surface Mesh This is a difficult problem that is relevant in several application fields.
3 Applications Computer Vision: - Scene analysis - Industrial Inspection - Robotics Medical Diagnosis: - Classification and - Detection of craniofacial deformations.
4 Basic Idea Generalize existing numeric surface representations for matching 3-D 3 D objects to the problem of identifying shape classes.
5 Main Contribution An algorithmic framework based on symbolic shape descriptors that are robust to deformations as opposed to numeric descriptors that are often tied to specific shapes.








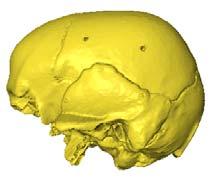
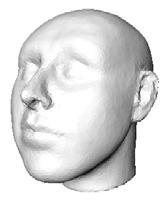




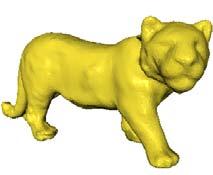
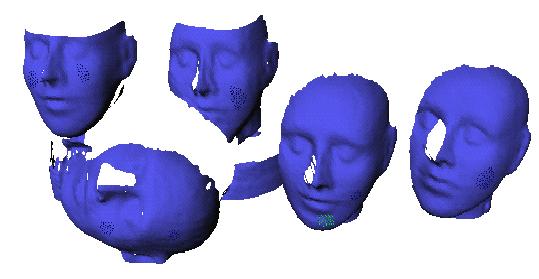
6 What Kind Of Deformations? Normal Neurocranium Normal Mandibles Abnormal 3-D Faces Abnormal Toy animals Shape classes: significant amount of intra-class variability
.")
7 Deformed Infants Skulls Normal Sagittal Synostosis Bicoronal Synostosis Metopic Coronal Sagittal Fused Sutures Occurs when sutures of the cranium fuse prematurely (synostosis).





8 More Craniofacial Deformations Unicoronal Synostosis Metopic Synostosis Bicoronal Synostosis Sagittal Synostosis Facial Asymmetry





9 Alignment-verification Objects Database Find correspondences using numeric signature information. Estimate candidate transformations. 3-D Range Scene Recognized Models Models Verification process selects the transformation that produces the best alignment.

10 Alignment-Verification Limitations The approach does not extend well to the problem of identifying classes of similar shapes. In general: Numeric shape representations are not robust to deformations. There are not exact correspondences between model and scene. Objects in a shape class do not align.
11 Component-Based Methodology 1 Numeric Signatures define 2 Overcomes the limitations of the alignment-verification approach Components 4 Describe spatial configuration 3 Symbolic Signatures + Architecture of Classifiers Recognition And Classification Of Deformable Shapes

12 Recognition Problem (1) We are given a set of surface meshes {C 1,C 2,,C n } which are random samples of two shape classes C C 1 C 2 C k C n

13 Recognition Problem (2) The problem is to use the given meshes and labels to construct an algorithm that determines whether shape class members are present in a single view range scene.




14 Classification Problem (1) We are given a set of surface meshes {C 1,C 2,,C n } which are random samples of two shape classes C +1 and C -1, where each surface mesh is labeled either by +1 or Normal Skulls C +1 Abnormal Skulls C C 1 C 2 C k C k+1 C k+2 C n
15 Classification Problem (2) The problem is to use the given meshes and labels to construct an algorithm that predicts the label of a new surface mesh C new. Is this skull normal (+1) or abnormal (-1)? C new
")

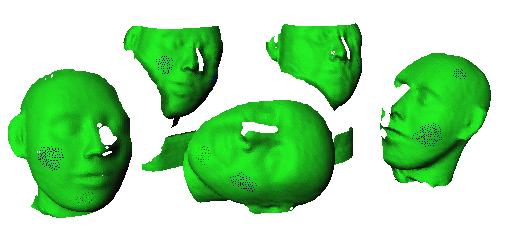
16 Classification Problem (3) We also consider the case of missing information: Shape class of normal heads (+1) Shape class of abnormal heads (-1) 3-D Range Scene Single View Clutter and Occlusion Are these heads normal or abnormal?




17 Assumptions All shapes are represented as oriented surface meshes of fixed resolution. The vertices of the meshes in the training set are in full correspondence. Finding full correspondences : hard problem yes but it is approachable ( use morphable models technique: Blantz and Vetter, SIGGRAPH 99; C. R. Shelton, IJCV, 2000; Allen et al., SIGGRAPH 2003).
18 Four Key Elements To Our Approach 1 Numeric Signatures 2 Components 4 3 Symbolic Signatures + Architecture of Classifiers Recognition And Classification Of Deformable Shapes
19 Numeric Signatures 1 Numeric Signatures Encode Local Surface Geometry of an Object 2 Components 4 3 Symbolic Signatures + Architecture of Classifiers
20 The Spin Image Signature P is the selected vertex. X is a contributing point of the mesh. n β X P α tangent plane at P α is the perpendicular distance from X to P s surface normal. β is the signed perpendicular distance from X to P s tangent plane.
21 Spin Image Construction A spin image is constructed - about a specified oriented point o of the object surface - with respect to a set of contributing points C, which is controlled by maximum distance and angle from o. It is stored as an array of accumulators S(α,β) computed via: For each point c in C(o) 1. compute α and β for c. 2. increment S (α,β) o






22 Numeric Signatures: Spin Images P 3-D faces Spin images for point P Rich set of surface shape descriptors. Their spatial scale can be modified to include local and non-local surface features. Representation is robust to scene clutter and occlusions.
23 Components 1 Numeric Signatures define 2 3 Components Symbolic Signatures Equivalent Numeric Signatures: Encode Local Geometry of a Shape Class + 4 Architecture of Classifiers
24 Select Seed Points How To Extract Shape Class Components? Training Set Compute Numeric Signatures Region Growing Algorithm Component Detector Grown components around seeds
 Detected components on a training")
25 Component Extraction Example Selected 8 seed points by hand Labeled Surface Mesh Region Growing Grow one region at the time (get one detector per component) Detected components on a training sample
26 How To Combine Component Information? Extracted components on test samples Note: Numeric signatures are invariant to mirror symmetry; our approach preserves such an invariance.
27 Symbolic Signatures 1 Numeric Signatures 2 Components 4 3 Symbolic Signatures Encode Geometrical Relationships Among Components + Architecture of Classifiers
28 Symbolic Signature Critical Point P Labeled Surface Mesh Encode Geometric Configuration Symbolic Signature at P Matrix storing component labels
29 Symbolic Signature Construction Critical Point P Normal tangent plane P a b Coordinate system defined up to a rotation Project labels to tangent plane at P b P a


30 Symbolic Signatures Are Robust To Deformations P Relative position of components is stable across deformations: experimental evidence
31 Architecture of Classifiers 1 2 Numeric Signatures Learns Components And Their Geometric Relationships Components 4 3 Symbolic Signatures + Architecture of Classifiers
32 Proposed Architecture (Classification Example) Verify spatial configuration of the components Input Identify Components Labeled Mesh Identify Symbolic Signatures Class Label -1 (Abnormal) Surface Mesh Two classification stages




33 Surface Mesh At Classification Time (1) Labeled Surface Mesh Multi-way classifier Bank of Component Detectors Assigns Component Labels Identify Components



34 At Classification Time (2) 1 Labeled Surface Mesh Symbolic pattern for components 1,2, Bank of Symbolic Signatures Detectors Two detectors Assigns Symbolic Labels Symbolic pattern for components 5,6,8-1

35 Finding Critical Points On Test +1 Samples Critical Point Margin associated with the component detector classifiers 1 0 Confidence Level -1
36 Architecture Implementation ALL our classifiers are (off-the the-shelf) ν- Support Vector Machines (ν-svms( SVMs) (Schölkopf et al., 2000 and 2001). Component (and symbolic signature) detectors are one-class classifiers. Component label assignment: performed with a multi-way classifier that uses pairwise classification scheme. Gaussian kernel.
 Classification")

37 Experimental Validation Recognition Tasks: 4 (T1 - T4) Classification Tasks: 3 (T5 T7) No. Experiments: 5470 Rotary Table Setup Laser Recognition Classification

38 Shape Classes

 Twist (5deg)")
 Push +Twist (10 deg)")
 Originals Morphs Global")

39 Enlarging Training Sets Using Virtual Samples Morphs Displacement Vectors Original (14) Twist (5deg) + Taper -Push + Spherify (10%) Push +Twist (10 deg) +Scale (1.2) Originals Morphs Global Morphing Operators Physical Modeling Electrical Engineering University of Washington
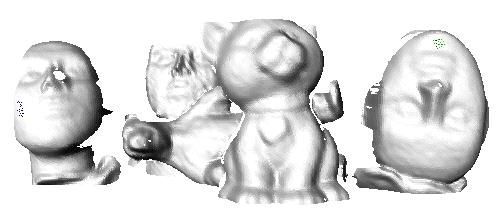
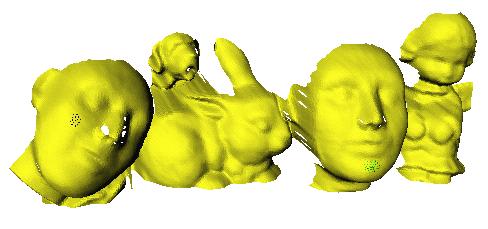
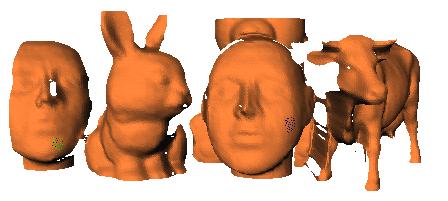
40 Task 1: Recognizing Single Objects (1) No. Shape classes: 9. Training set size: 400 meshes. Testing set size: 200 meshes. No. Experiments: No. Component detectors:3. No. Symbolic signature detectors: 1. Numeric signature size: 40x40. Symbolic signature size: 20x20. No clutter and occlusion.


")
41 Task 1: Recognizing Single Objects (2) Snowman: 93%. Rabbit: 92%. Dog: 89%. Cat: 85.5%. Cow: 92%. Bear: 94%. Horse: 92.7%. Human head: 97.7%. Human face: 76%. Recognition rates (true positives) (No clutter, no occlusion, complete models)
42 Tasks 2-3: 2 Recognition In Complex Scenes (1) No. Shape classes: 3. Training set size: 400 meshes. Testing set size: 200 meshes. No. Experiments: No. Component detectors:3. No. Symbolic signature detectors: 1. Numeric signature size: 40x40. Symbolic signature size: 20x20. T2 low clutter and occlusion.
43 Task 2-3: 2 Recognition in Complex Scenes (2) Shape True False True False Class Positives Positives Positives Positives Snowmen 91% 31% 87.5% 28% Rabbit 90.2% 27.6% 84.3% 24% Dog 89.6% 34.6% 88.12% 22.1% Task 2 Task 3

44 Task 2-3: 2 Recognition in Complex Scenes (3)
45 Task 4: Recognizing Human Heads (1) No. Shape classes: 1. Training set size: 400 meshes. Testing set size: 250 meshes. No. Experiments: 710. No. Component detectors:8. No. Symbolic signature detectors: 2. Numeric signature size: 70x70. Symbolic signature size: 12x12.
46 Task 4: Recognizing Human Heads (2) Recognition Rate (44,0.9) % Clutter < 40 % Occlusion < 40 (40,0.88) % Occlusion % Clutter FP rate: ~1%,

47 Task 4: Recognizing Human Heads (3)
48 Task 5: Classifying Normal vs. Abnormal Human Heads (1) No. Shape classes: 6. Training set size: 400 meshes. Testing set size: 200 meshes. No. Experiments: No. Component detectors:3. No. Symbolic signature detectors: 1. Numeric signature size: 50x50. Symbolic signature size: 12x12.
 Five")




49 Task 5: Classifying Normal vs. Abnormal Human Heads (1) Five Cases Shape Classes Normal vs. Abnormal 1 Normal vs. Abnormal 2 Classification Accuracy % Abnormal 1 vs Abnormal 1 vs Normal Abnormal Abnormal 1 vs Full models 65%-35% 50%-50% 25%-75% (convex combinations of Normal and Abnormal 1)
50 Task 6: Classifying Normal vs. Abnormal Human Heads In Complex Scenes(1) No. Shape classes: 2. Training set size: 400 meshes. Testing set size: 200 meshes. No. Experiments: No. Component detectors:3. No. Symbolic signature detectors: 1. Numeric signature size: 100x100. Symbolic signature size: 12x12.
 Shape")

51 Task 6: Classifying Normal vs. Abnormal Human Heads In Complex Scenes(1) Shape Classes Normal vs. Abnormal 1 Classification Accuracy % 88 Range scenes single view Clutter < 15% and occlusion < 50%
52 Task 7: Classifying Normal vs. Abnormal Neurocranium (1) No. Shape classes: 2. Training set size: 400 meshes. Testing set size: 200 meshes. No. Experiments: No. Component detectors:3. No. Symbolic signature detectors: 1. Numeric signature size: 50x50. Symbolic signature size: 15x15.

 100 Experiments")



53 Task 7: Classifying Normal vs. Abnormal Neurocranium (2) 100 Experiments Shape Classes Normal vs. Abnormal Classificatio n Accuracy % 89 No clutter and occlusion Normal Abnormal (sagittal synostosis ) Superimposed models
54 Main Contributions (1) A novel symbolic signature representation of deformable shapes that is robust to intra-class variability and missing information, as opposed to a numeric representation which is often tied to a specific shape. A novel kernel function for quantifying symbolic signature similarities.
55 Main Contributions (2) A region growing algorithm for learning shape class components. A novel architecture of classifiers for abstracting the geometry of a shape class. A validation of our methodology in a set of large scale recognition and classification experiments aimed at applications in scene analysis and medical diagnosis.
56 Main Contributions (3) Our approach: - Is general can be applied to a variety of shape classes. - Is robust to clutter and occlusion - It Works in practice - Is a step forward in 3-D 3 D object recognition research.
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering Basic Idea Generalize existing numeric surface representations for matching 3-D objects to the problem of identifying
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. Thesis, Electrical Engineering Basic Idea Generalize existing numeric surface representations for matching 3-D objects to the problem of identifying
Recognizing Deformable Shapes. Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital
 Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Recognizing Deformable Shapes Salvador Ruiz Correa UW Ph.D. Graduate Researcher at Children s Hospital Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable
Recognizing Deformable Shapes. Salvador Ruiz Correa Ph.D. UW EE
 Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
Recognizing Deformable Shapes Salvador Ruiz Correa Ph.D. UW EE Input 3-D Object Goal We are interested in developing algorithms for recognizing and classifying deformable object shapes from range data.
High-Level Computer Vision
 High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
High-Level Computer Vision Detection of classes of objects (faces, motorbikes, trees, cheetahs) in images Recognition of specific objects such as George Bush or machine part #45732 Classification of images
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 1, JANUARY Symbolic Signatures for Deformable Shapes
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 1, JANUARY 2006 75 Symbolic Signatures for Deformable Shapes Salvador Ruiz-Correa, Linda G. Shapiro, Fellow, IEEE, Marina Meila,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 28, NO. 1, JANUARY 2006 75 Symbolic Signatures for Deformable Shapes Salvador Ruiz-Correa, Linda G. Shapiro, Fellow, IEEE, Marina Meila,
Discriminating deformable shape classes
 Discriminating deformable shape classes S. Ruiz-Correa, L. G. Shapiro, M. Meilă and G. Berson Department of Electrical Engineering Department of Statistics Division of Medical Genetics, School of Medicine
Discriminating deformable shape classes S. Ruiz-Correa, L. G. Shapiro, M. Meilă and G. Berson Department of Electrical Engineering Department of Statistics Division of Medical Genetics, School of Medicine
A New Paradigm for Recognizing 3-D Object Shapes from Range Data
 A New aradigm for Recognizing 3-D Object Shapes from Range Data Salvador Ruiz-Correa y, Linda G. Shapiro y and Marina Meilă z ydepartment of Electrical Engineering zdepartment of Statistics University
A New aradigm for Recognizing 3-D Object Shapes from Range Data Salvador Ruiz-Correa y, Linda G. Shapiro y and Marina Meilă z ydepartment of Electrical Engineering zdepartment of Statistics University
Compu&ng Correspondences in Geometric Datasets. 4.2 Symmetry & Symmetriza/on
 Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
Compu&ng Correspondences in Geometric Datasets 4.2 Symmetry & Symmetriza/on Symmetry Invariance under a class of transformations Reflection Translation Rotation Reflection + Translation + global vs. partial
A Learning Approach to 3D Object Representation for Classification
 A Learning Approach to 3D Object Representation for Classification Indriyati Atmosukarto and Linda G. Shapiro University of Washington, Department of Computer Science and Engineering,Seattle, WA, USA {indria,shapiro}@cs.washington.edu
A Learning Approach to 3D Object Representation for Classification Indriyati Atmosukarto and Linda G. Shapiro University of Washington, Department of Computer Science and Engineering,Seattle, WA, USA {indria,shapiro}@cs.washington.edu
A New Paradigm for Recognizing 3-D Object Shapes from Range Data
 A New aradigm for Recognizing 3-D Object Shapes from Range Data Salvador Ruiz-Correa, Linda G Shapiro and Marina Meilă Department of Electrical Engineering Department of Statistics University of Washington,
A New aradigm for Recognizing 3-D Object Shapes from Range Data Salvador Ruiz-Correa, Linda G Shapiro and Marina Meilă Department of Electrical Engineering Department of Statistics University of Washington,
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
3D Models and Matching
 3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
3D Models and Matching representations for 3D object models particular matching techniques alignment-based systems appearance-based systems GC model of a screwdriver 1 3D Models Many different representations
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Patch-based Object Recognition. Basic Idea
 Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Patch-based Object Recognition 1! Basic Idea Determine interest points in image Determine local image properties around interest points Use local image properties for object classification Example: Interest
Categorization by Learning and Combining Object Parts
 Categorization by Learning and Combining Object Parts Bernd Heisele yz Thomas Serre y Massimiliano Pontil x Thomas Vetter Λ Tomaso Poggio y y Center for Biological and Computational Learning, M.I.T., Cambridge,
Categorization by Learning and Combining Object Parts Bernd Heisele yz Thomas Serre y Massimiliano Pontil x Thomas Vetter Λ Tomaso Poggio y y Center for Biological and Computational Learning, M.I.T., Cambridge,
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Component-based Face Recognition with 3D Morphable Models
 Component-based Face Recognition with 3D Morphable Models Jennifer Huang 1, Bernd Heisele 1,2, and Volker Blanz 3 1 Center for Biological and Computational Learning, M.I.T., Cambridge, MA, USA 2 Honda
Component-based Face Recognition with 3D Morphable Models Jennifer Huang 1, Bernd Heisele 1,2, and Volker Blanz 3 1 Center for Biological and Computational Learning, M.I.T., Cambridge, MA, USA 2 Honda
Shape Matching. Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007
 Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Announcements. Recognition (Part 3) Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test
 Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test") Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Recognition (Part 4) Introduction to Computer Vision CSE 152 Lecture 17
 Introduction to Computer Vision CSE 152 Lecture 17") Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
Component-based Face Recognition with 3D Morphable Models
 Component-based Face Recognition with 3D Morphable Models B. Weyrauch J. Huang benjamin.weyrauch@vitronic.com jenniferhuang@alum.mit.edu Center for Biological and Center for Biological and Computational
Component-based Face Recognition with 3D Morphable Models B. Weyrauch J. Huang benjamin.weyrauch@vitronic.com jenniferhuang@alum.mit.edu Center for Biological and Center for Biological and Computational
Category-level localization
 Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Category-level localization Cordelia Schmid Recognition Classification Object present/absent in an image Often presence of a significant amount of background clutter Localization / Detection Localize object
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
ARTICLE IN PRESS. Pattern Recognition
 Pattern Recognition 43 (2010) 1502 1517 Contents lists available at ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr 3D object classification using salient point patterns
Pattern Recognition 43 (2010) 1502 1517 Contents lists available at ScienceDirect Pattern Recognition journal homepage: www.elsevier.com/locate/pr 3D object classification using salient point patterns
Recognizing Objects by Matching Oriented Points
 Submitted to IEEE Computer Vision and Pattern Recognition, CVPR 97 Recognizing Objects by Matching Oriented Points Andrew Edie Johnson and Martial Hebert The Robotics Institute, Carnegie Mellon University
Submitted to IEEE Computer Vision and Pattern Recognition, CVPR 97 Recognizing Objects by Matching Oriented Points Andrew Edie Johnson and Martial Hebert The Robotics Institute, Carnegie Mellon University
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
The correspondence problem. A classic problem. A classic problem. Deformation-Drive Shape Correspondence. Fundamental to geometry processing
 The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
The correspondence problem Deformation-Drive Shape Correspondence Hao (Richard) Zhang 1, Alla Sheffer 2, Daniel Cohen-Or 3, Qingnan Zhou 2, Oliver van Kaick 1, and Andrea Tagliasacchi 1 July 3, 2008 1
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Using Spin-Images for Efficient Object Recognition in Cluttered 3-D Scenes
 Using Spin-Images for Efficient Object Recognition in Cluttered 3-D Scenes Andrew E. Johnson Martial Hebert Jet Propulsion Laboratory The Robotics Institute Mail Stop 107-102 Carnegie Mellon University
Using Spin-Images for Efficient Object Recognition in Cluttered 3-D Scenes Andrew E. Johnson Martial Hebert Jet Propulsion Laboratory The Robotics Institute Mail Stop 107-102 Carnegie Mellon University
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Loop detection and extended target tracking using laser data
 Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Licentiate seminar 1(39) Loop detection and extended target tracking using laser data Karl Granström Division of Automatic Control Department of Electrical Engineering Linköping University Linköping, Sweden
Determinant of homography-matrix-based multiple-object recognition
 Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
A New Shape Matching Measure for Nonlinear Distorted Object Recognition
 A New Shape Matching Measure for Nonlinear Distorted Object Recognition S. Srisuky, M. Tamsriy, R. Fooprateepsiri?, P. Sookavatanay and K. Sunaty Department of Computer Engineeringy, Department of Information
A New Shape Matching Measure for Nonlinear Distorted Object Recognition S. Srisuky, M. Tamsriy, R. Fooprateepsiri?, P. Sookavatanay and K. Sunaty Department of Computer Engineeringy, Department of Information
Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes
 Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes TDT 03 - Advanced Topics in Computer Graphics Presentation by Ruben H. Fagerli Paper to be summarized Using Spin Images for Efficient
Using Spin Images for Efficient Object Recognition in Cluttered 3D Scenes TDT 03 - Advanced Topics in Computer Graphics Presentation by Ruben H. Fagerli Paper to be summarized Using Spin Images for Efficient
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
CS 223B Computer Vision Problem Set 3
 CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
CS 223B Computer Vision Problem Set 3 Due: Feb. 22 nd, 2011 1 Probabilistic Recursion for Tracking In this problem you will derive a method for tracking a point of interest through a sequence of images.
Overview of Computer Vision. CS308 Data Structures
 Overview of Computer Vision CS308 Data Structures What is Computer Vision? Deals with the development of the theoretical and algorithmic basis by which useful information about the 3D world can be automatically
Overview of Computer Vision CS308 Data Structures What is Computer Vision? Deals with the development of the theoretical and algorithmic basis by which useful information about the 3D world can be automatically
3D Shape Analysis for Quantification, Classification and Retrieval
 3D Shape Analysis for Quantification, Classification and Retrieval 3D Shape Analysis 3D mesh object 2D salient map 2D histogram GP tree Indriyati Atmosukarto PhD Defense Advisor: Prof Linda Shapiro General
3D Shape Analysis for Quantification, Classification and Retrieval 3D Shape Analysis 3D mesh object 2D salient map 2D histogram GP tree Indriyati Atmosukarto PhD Defense Advisor: Prof Linda Shapiro General
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Breaking it Down: The World as Legos Benjamin Savage, Eric Chu
 Breaking it Down: The World as Legos Benjamin Savage, Eric Chu To devise a general formalization for identifying objects via image processing, we suggest a two-pronged approach of identifying principal
Breaking it Down: The World as Legos Benjamin Savage, Eric Chu To devise a general formalization for identifying objects via image processing, we suggest a two-pronged approach of identifying principal
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
A Salient-Point Signature for 3D Object Retrieval
 A Salient-Point Signature for 3D Object Retrieval Indriyati Atmosukarto, Linda G. Shapiro Department of Computer Science and Engineering University of Washington Seattle, WA, USA indria, shapiro@cs.washington.edu
A Salient-Point Signature for 3D Object Retrieval Indriyati Atmosukarto, Linda G. Shapiro Department of Computer Science and Engineering University of Washington Seattle, WA, USA indria, shapiro@cs.washington.edu
Detecting Multiple Symmetries with Extended SIFT
 1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
Shape Matching and Object Recognition using Low Distortion Correspondences
 Shape Matching and Object Recognition using Low Distortion Correspondences Authors: Alexander C. Berg, Tamara L. Berg, Jitendra Malik Presenter: Kalyan Chandra Chintalapati Flow of the Presentation Introduction
Shape Matching and Object Recognition using Low Distortion Correspondences Authors: Alexander C. Berg, Tamara L. Berg, Jitendra Malik Presenter: Kalyan Chandra Chintalapati Flow of the Presentation Introduction
Efficient Symbolic Signatures for Classifying Craniosynostosis Skull Deformities
 Efficient Symbolic Signatures for Classifying Craniosynostosis Skull Deformities H. Jill Lin 1, Salvador Ruiz-Correa 1,2, Raymond W. Sze 1,2, Michael L. Cunningham 1,2, Matthew L. Speltz 1, Anne V. Hing
Efficient Symbolic Signatures for Classifying Craniosynostosis Skull Deformities H. Jill Lin 1, Salvador Ruiz-Correa 1,2, Raymond W. Sze 1,2, Michael L. Cunningham 1,2, Matthew L. Speltz 1, Anne V. Hing
CS 468 Data-driven Shape Analysis. Shape Descriptors
 CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
CS 468 Data-driven Shape Analysis Shape Descriptors April 1, 2014 What Is A Shape Descriptor? Shapes Shape Descriptor F1=[f1, f2,.., fn] F2=[f1, f2,.., fn] F3=[f1, f2,.., fn] What Is A Shape Descriptor?
Image Processing (IP)
") Image Processing Pattern Recognition Computer Vision Xiaojun Qi Utah State University Image Processing (IP) Manipulate and analyze digital images (pictorial information) by computer. Applications: The
Image Processing Pattern Recognition Computer Vision Xiaojun Qi Utah State University Image Processing (IP) Manipulate and analyze digital images (pictorial information) by computer. Applications: The
Registration of Dynamic Range Images
 Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Registration of Dynamic Range Images Tan-Chi Ho 1,2 Jung-Hong Chuang 1 Wen-Wei Lin 2 Song-Sun Lin 2 1 Department of Computer Science National Chiao-Tung University 2 Department of Applied Mathematics National
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
A Non-Rigid Feature Extraction Method for Shape Recognition
 A Non-Rigid Feature Extraction Method for Shape Recognition Jon Almazán, Alicia Fornés, Ernest Valveny Computer Vision Center Dept. Ciències de la Computació Universitat Autònoma de Barcelona Bellaterra,
A Non-Rigid Feature Extraction Method for Shape Recognition Jon Almazán, Alicia Fornés, Ernest Valveny Computer Vision Center Dept. Ciències de la Computació Universitat Autònoma de Barcelona Bellaterra,
Abstract We present a system which automatically generates a 3D face model from a single frontal image of a face. Our system consists of two component
 A Fully Automatic System To Model Faces From a Single Image Zicheng Liu Microsoft Research August 2003 Technical Report MSR-TR-2003-55 Microsoft Research Microsoft Corporation One Microsoft Way Redmond,
A Fully Automatic System To Model Faces From a Single Image Zicheng Liu Microsoft Research August 2003 Technical Report MSR-TR-2003-55 Microsoft Research Microsoft Corporation One Microsoft Way Redmond,
CS 231A Computer Vision (Fall 2012) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
CS 231A Computer Vision (Fall 2012) Problem Set 3 Due: Nov. 13 th, 2012 (2:15pm) 1 Probabilistic Recursion for Tracking (20 points) In this problem you will derive a method for tracking a point of interest
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method
 The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
The Novel Approach for 3D Face Recognition Using Simple Preprocessing Method Parvin Aminnejad 1, Ahmad Ayatollahi 2, Siamak Aminnejad 3, Reihaneh Asghari Abstract In this work, we presented a novel approach
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Lecture 7: Image Morphing. Idea #2: Align, then cross-disolve. Dog Averaging. Averaging vectors. Idea #1: Cross-Dissolving / Cross-fading
 Lecture 7: Image Morphing Averaging vectors v = p + α (q p) = (1 - α) p + α q where α = q - v p α v (1-α) q p and q can be anything: points on a plane (2D) or in space (3D) Colors in RGB or HSV (3D) Whole
Lecture 7: Image Morphing Averaging vectors v = p + α (q p) = (1 - α) p + α q where α = q - v p α v (1-α) q p and q can be anything: points on a plane (2D) or in space (3D) Colors in RGB or HSV (3D) Whole
Person Detection in Images using HoG + Gentleboost. Rahul Rajan June 1st July 15th CMU Q Robotics Lab
 Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Person Detection in Images using HoG + Gentleboost Rahul Rajan June 1st July 15th CMU Q Robotics Lab 1 Introduction One of the goals of computer vision Object class detection car, animal, humans Human
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Face Cyclographs for Recognition
 Face Cyclographs for Recognition Guodong Guo Department of Computer Science North Carolina Central University E-mail: gdguo@nccu.edu Charles R. Dyer Computer Sciences Department University of Wisconsin-Madison
Face Cyclographs for Recognition Guodong Guo Department of Computer Science North Carolina Central University E-mail: gdguo@nccu.edu Charles R. Dyer Computer Sciences Department University of Wisconsin-Madison
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Road-Sign Detection and Recognition Based on Support Vector Machines. Maldonado-Bascon et al. et al. Presented by Dara Nyknahad ECG 789
 Road-Sign Detection and Recognition Based on Support Vector Machines Maldonado-Bascon et al. et al. Presented by Dara Nyknahad ECG 789 Outline Introduction Support Vector Machine (SVM) Algorithm Results
Road-Sign Detection and Recognition Based on Support Vector Machines Maldonado-Bascon et al. et al. Presented by Dara Nyknahad ECG 789 Outline Introduction Support Vector Machine (SVM) Algorithm Results
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012
 An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012, 19.01.2012 INSTITUTE FOR ANTHROPOMATICS, FACIAL IMAGE PROCESSING AND ANALYSIS YIG University of the State of Baden-Wuerttemberg
An Associate-Predict Model for Face Recognition FIPA Seminar WS 2011/2012, 19.01.2012 INSTITUTE FOR ANTHROPOMATICS, FACIAL IMAGE PROCESSING AND ANALYSIS YIG University of the State of Baden-Wuerttemberg
CHAPTER 1 INTRODUCTION
 1 CHAPTER 1 INTRODUCTION Table of Contents Page No. 1 INTRODUCTION 1.1 Problem overview 2 1.2 Research objective 3 1.3 Thesis outline 7 2 1. INTRODUCTION 1.1 PROBLEM OVERVIEW The process of mapping and
1 CHAPTER 1 INTRODUCTION Table of Contents Page No. 1 INTRODUCTION 1.1 Problem overview 2 1.2 Research objective 3 1.3 Thesis outline 7 2 1. INTRODUCTION 1.1 PROBLEM OVERVIEW The process of mapping and
Object Recognition. The Chair Room
 Object Recognition high-level interpretations objects scene elements image elements raw images Object recognition object recognition is a typical goal of image analysis object recognition includes - object
Object Recognition high-level interpretations objects scene elements image elements raw images Object recognition object recognition is a typical goal of image analysis object recognition includes - object
Object recognition (part 2)
") Object recognition (part 2) CSE P 576 Larry Zitnick (larryz@microsoft.com) 1 2 3 Support Vector Machines Modified from the slides by Dr. Andrew W. Moore http://www.cs.cmu.edu/~awm/tutorials Linear Classifiers
Object recognition (part 2) CSE P 576 Larry Zitnick (larryz@microsoft.com) 1 2 3 Support Vector Machines Modified from the slides by Dr. Andrew W. Moore http://www.cs.cmu.edu/~awm/tutorials Linear Classifiers
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Geometric Modeling Assignment 5: Shape Deformation
 Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Deep condolence to Professor Mark Everingham
 Deep condolence to Professor Mark Everingham Towards VOC2012 Object Classification Challenge Generalized Hierarchical Matching for Sub-category Aware Object Classification National University of Singapore
Deep condolence to Professor Mark Everingham Towards VOC2012 Object Classification Challenge Generalized Hierarchical Matching for Sub-category Aware Object Classification National University of Singapore
Face detection and recognition. Detection Recognition Sally
 Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Face detection and recognition Detection Recognition Sally Face detection & recognition Viola & Jones detector Available in open CV Face recognition Eigenfaces for face recognition Metric learning identification
Projected Texture for Hand Geometry based Authentication
 Projected Texture for Hand Geometry based Authentication Avinash Sharma Nishant Shobhit Anoop Namboodiri Center for Visual Information Technology International Institute of Information Technology, Hyderabad,
Projected Texture for Hand Geometry based Authentication Avinash Sharma Nishant Shobhit Anoop Namboodiri Center for Visual Information Technology International Institute of Information Technology, Hyderabad,
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Stable and Multiscale Topological Signatures
 Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Stable and Multiscale Topological Signatures Mathieu Carrière, Steve Oudot, Maks Ovsjanikov Inria Saclay Geometrica April 21, 2015 1 / 31 Shape = point cloud in R d (d = 3) 2 / 31 Signature = mathematical
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
3-D MRI Brain Scan Classification Using A Point Series Based Representation
 3-D MRI Brain Scan Classification Using A Point Series Based Representation Akadej Udomchaiporn 1, Frans Coenen 1, Marta García-Fiñana 2, and Vanessa Sluming 3 1 Department of Computer Science, University
3-D MRI Brain Scan Classification Using A Point Series Based Representation Akadej Udomchaiporn 1, Frans Coenen 1, Marta García-Fiñana 2, and Vanessa Sluming 3 1 Department of Computer Science, University
Eppur si muove ( And yet it moves )
") Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Eppur si muove ( And yet it moves ) - Galileo Galilei University of Texas at Arlington Tracking of Image Features CSE 4392-5369 Vision-based Robot Sensing, Localization and Control Dr. Gian Luca Mariottini,
Shape Matching for 3D Retrieval and Recognition. Agenda. 3D collections. Ivan Sipiran and Benjamin Bustos
 Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
Shape Matching for 3D Retrieval and Recognition Ivan Sipiran and Benjamin Bustos PRISMA Research Group Department of Computer Science University of Chile Agenda Introduction Applications Datasets Shape
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribes: Jeremy Pollock and Neil Alldrin LECTURE 14 Robust Feature Matching 14.1. Introduction Last lecture we learned how to find interest points
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing