Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition
|
|
|
- Beatrice Ann Harrell
- 5 years ago
- Views:
Transcription
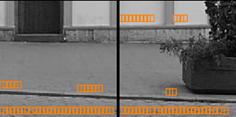
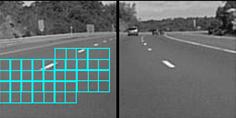
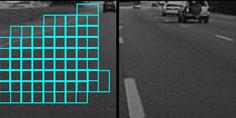
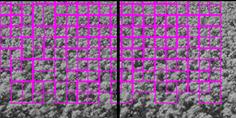
1 Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA 2 Department of Electrical Engineering, Princeton University, NJ 08544, USA 3 Robotics and Intelligent Systems Group, Universidad del Norte, Colombia {bangpeng,feifeili}@cs.princeton.edu jniebles@princeton.edu Abstract This paper presents a method that considers not only patch appearances, but also patch relationships in the form of adjectives and prepositions for natural scene recognition. Most of the existing scene categorization approaches only use patch appearances or co-occurrence of patch appearances to determine the scene categories, but the relationships among patches remain ignored. Those relationships are, however, critical for recognition and understanding. For example, a beach scene can be characterized by a sky region sand, and a water region between sky and sand. We believe that exploiting such relations between image regions can improve scene recognition. In our approach, each image is represented as a spatial pyramid, from which we obtain a collection of patch appearances with spatial layout information. We apply a feature mining approach to get discriminative patch combinations. The mined patch combinations can be interpreted as adjectives or prepositions, which are used for scene understanding and recognition. Experimental results on a fifteen class scene dataset show that our approach achieves competitive state-of-the-art recognition accuracy, while providing a rich description of the scene classes in terms of the mined adjectives and prepositions. 1. Introduction In this paper, we address the problem of natural scene classification and understanding. We aim to develop algorithms that can recognize scene classes such as highway, mountain, or living room from input images, as well as learn the types of image patches and the relationships among such patches that define each scene category. A common strategy for scene classification is based on (a) Highway (b) Coast Figure 1. Examples showing the discriminative and descriptive ability of our approach. Both the highway and coast images have sky regions on the top (yellow patches). Using prepositions, the highway image can be described as having a region of sky a region of road (cyan patches), while the coast image can be described as having a region of sky sand (blue patches) and water (magenta patches) in between. the bag-of-words image representation [17, 2]. However, although this approach has demonstrated competitive performance, its descriptive and discriminative abilities are severely limited, partly because the bag-of-words representation ignores the geometrical arrangement of patches in the image. One promising strategy to obtain more discriminative features for scene classification and understanding, consists of exploring the spatial relationships among image regions. For example, in Figure 1(b), a coast image can be described as having a sky region a sand region, and a water region between sky and sand. This representation is capable of not only discriminating between coast and highway (Figure 1(a)) images, but also understanding the intrinsic properties of coast images. In this work, we aim to explore such relationships for scene classification and understanding. We consider relationships of two /09/$ IEEE 100
2 types: adjectives (e.g. smaller, ) and prepositions (e.g., ). In general, modeling adjectives and prepositions for images can be computationally challenging due to the large number of possible adjectives and prepositions. In our approach, we adopt an image representation inspired by the spatial pyramid method [8]. We partition the image into increasingly finer subregions, and compute a histogram of local features on each subregion, ly to [8]. Furthermore, instead of considering local features of a fixed size as in [8], we use local image patches at multiple scales. Our method can represent multiple relationships among local patches which capture their appearances as well as spatial layout. Based on this multi-scale image representation with spatial layouts, we apply a data mining approach [1] to obtain all discriminative patch relationships for each class. Those relationships can be interpreted as adjectives and prepositions. The data mining approach is suitable in our problem due to its ability to deal with large amounts of data efficiently. The remaining part of this paper is organized as follows. Section 2 overviews related work. Our image representation and feature mining approaches are described in Section 3 and Section 4 respectively. The classification approach used in our method is presented in Section 5. Finally, we present experimental results on a natural scene data set in Section Previous Work In order to encode spatial information in images, several methods have considered using feature compositions to classify images (e.g. doublets [15] and correlatons [14]). The discriminative ability of these approaches is limited due to their reliance on feature co-occurrences only. Several other approaches based on generative part-based models (e.g. Pictorial Structures [3] and Constellation models [4, 18]) usually entail significant computational cost, and are therefore limited to a small number of image parts (typically less than 10). Recently, researchers have proposed the application of graphical models to the problem of learning spatial relationships among image regions [13, 11]. These approaches first use segmentation algorithms to obtain image regions, and then learn the relationships among image regions via graphical modeling. In the graphical models, each node represents one image patch, and each edge represents one relationship between two patches. This line of approaches can perform object/scene recognition and localization simultaneously and achieve promising performance on many data sets. However, they rely on image segmentation as a preprocessing step. Although it has been shown that current segmentation can already facilitate image recognition [10], obtaining semantically meaningful image segmentations is still an active research topic in computer vision. Instead of using generative models and relying on image segmentation as pre-processing stage, in this paper we aim to discover discriminative relationships to understand scene classes. One work closely related to ours is the spatial pyramid matching method [8]. In their framework, the image is partitioned into increasingly finer sub-regions and histograms of local features are computed inside each subregion. The ity between two histograms is measured by the pyramid match kernel [5]. This approach shows promising performance in scene and object recognition tasks, partly due to its ability to encode weak spatial relationships among image patches and the effectiveness of the pyramid match kernel. However, the spatial pyramid representation does not explicitly capture stronger relationships (such as adjectives and prepositions) among patches in the image. Another work for adjectives and prepositions modeling is the method of Gupta and Davis [6]. On a set of weakly labeled images, this approach uses relationship words (adjectives and prepositions) to reduce correspondence ambiguity and applies a constrained model to achieve better image labeling performance. But the adjectives and prepositions considered in this approach are manually pre-defined rather than automatically discovered. In this paper, the adjectives and prepositions can be automatically obtained given a set of training images. Our method is based on a data mining approach [1]. Due to its computational efficiency, data mining has been recently used to mine feature configurations for object and action recognition [12, 19]. Our method differs from these approaches in that our mining procedure considers more precise spatial information. 3. Adjectives and Prepositions in Images In this section, we first introduce our image representation which is based on a spatial pyramid and local patches of multiple scales. We then define adjectives and prepositions within the scope of our framework. We also show that our approach can cover a large volume of patch relationships, which instantiate the adjectives and prepositions under consideration Multi-Scale Local es and Spatial Pyramid Image Representation The goal of feature representation is to obtain an image description which is robust to within-class variations and can discriminate images from different classes. In addition, the feature representation should enable us to extract adjectives and prepositions effectively. We achieve the goals by representing images in a multi-scale (or coarse-to-fine ) manner [16] and adopting a modified spatial pyramid technique [8]. Figure 2 provides an illustration of our represen- 101


3 Image F B Pyramid Level: 0 A 1 D C 2 G E Size 1 Size 2 Size 1 Size 2 Size 1 Size 2 Figure 2. Image representation based on multi-scale local patches and a spatial pyramid. This figure shows an example that uses a 3-level spatial pyramid and local patches with 2 different scales. Figure 3. {A, B, C, D, E, F, G} represent local patches and their layout on the 3rd level of the spatial pyramid (4 4 sub-regions). The texture filling each patch indicate different visual codewords. Our multi-scale local patches and spatial pyramid representation facilitates the extraction of relations among local patches. Relationships such as G is E and F is than D can be automatically mined. Note that one codeword may appear in a subregion for many times and one subregion usually contains patches of many different codewords Definition of Adjectives and Prepositions tation scheme. Our image representation is constructed as follows. We adopt a modified spatial pyramid representation [8], which captures the spatial layout of patches in the image. A spatial pyramid is constructed by sequentially dividing an image into increasingly finer sub-regions. Figure 2 shows an example of a 3-level spatial pyramid. In the l-th level (l {0, 1, 2} in Figure 2) of the spatial pyramid, the image is divided into 2l 2l subregions. We extract local image patches of multiple scales from each subregion, which are obtained by densely sampling the image using a regular grid. In our example of Figure 2, we use two different local patch sizes. In order to represent the appearance of each patch, we first extract SIFT descriptors [9] and then assign each patch to one codeword. The visual dictionary of codewords can be obtained by clustering patch descriptors from the set of training images. Finally, the image is represented by a set of histograms1, where each histogram counts the occurrence of visual codewords of a particular scale over one subregion in the spatial pyramid. Implementation Details. In our experiments, we use a three-level spatial pyramid, i.e., we partition the image into 1 1, 2 2, and 4 4 sub-regions respectively. Overlapping image patches of size 8 8, 16 16, and are extracted from the image, and SIFT descriptors are computed for each case. The overlap is defined as half the length of the patch side. We use k-means clustering to build three visual vocabularies, one per patch size. The number of codewords in each vocabulary is set to The number of histograms is N PL 1 2l l=0 2, where Ns is the number of patch scales and L is the number of levels in the pyramid. s Given our image representation, which captures patch appearances (based on a visual codebook) and spatial layout of patches (based on a spatial pyramid), we are now ready to define the concept of adjectives and prepositions. In our approach, the adjectives and prepositions can be constructed by simply considering particular spatial relationships among patches with specific appearances. Figure 3 illustrates some adjectives and prepositions that can be represented with our method. The figure shows a spatial layout of the patches A, B, C, D, E, F, G in a 4 4 image partition. In the following, we describe some of the adjectives and prepositions that can be extracted from our image representation: Above(G, E): G is patch E. Left, Near(A, C): A is on the of C, and they are close to each other. Left, Far(A, D): A is on the of D, and they are far away from each other. Larger(B, C): B is larger than C. Brighter(D, A): The intensity of patch D is than the intensity of A. Smoother(F, E): The texture of patch F is than the texture of patch E. We can see that, based on the image representation of multi-scale local patches and the spatial pyramid, we can encode many different types of adjectives and prepositions, including relationships of texture, position, size, etc. Note 102
4 that the relationships that our method can represent are not limited to the ones listed. In this work, we encode adjectives and prepositions in each spatial pyramid level independently, i.e. we do not consider the relations between patches from two different pyramid levels. In this method, the first level of the pyramid only encodes simple co-occurrence of image patches, with no information about their spatial layouts. As we move up in the pyramid level, more detailed spatial information is included in the adjectives and prepositions that are extracted. Furthermore, instead of only considering relations among pairs of image patches, we consider the relation among multiple image patches simultaneously. This allows us to define more complex adjectives and prepositions, and even the relationships that combine adjectives and prepositions. For example, in Figure 3, we can encode the relations among {A, B, C} simultaneously: (patches B and C are on the right of A) AND (B is larger than C). 4. Mining Discriminative Adjectives and Prepositions 4.1. Extraction of Adjectives and Prepositions As a Mining Problem Having shown how the adjectives and prepositions are described, we are now ready to extract a set of discriminative adjectives and prepositions from the training images. Since we can represent not only adjectives and prepositions, but also the combination of them (Section 3.2), we denote the relationships that our approach can describe Relationship Sets (RSets). One RSet consists of several Relationship Units (RUnits); each unit indicates that a specific codeword appears in a specific image sub-region. A relationship that consists of m RUnits is called an m-rset. Note that each RUnit is a 1-RSet. An RSet R is discriminative for a class c if R has large occurrence scores on images belonging to class c, and has small occurrence scores on images of other classes. Considering an m-rset R = {R 1,, R m } and an image I, the occurrence score s of R on I is computed by s = min { I(R j ), j = 1,, m } (1) where I(R j ) is the number of occurrences of the RUnit R j in image I. Given the occurrence score of each RSet, the discriminative ability of an RSet R for a class c is measured by two terms, the Support value Supp(R, c) and the Confidence value Conf(R, c). An RSet R is discriminative for a class c if both Supp(R, c) and Conf(R, c) are large. Let s i denote the occurrence number of R in an image I i with class label c i. The support and confidence values of R for class c are computed by Supp(R, c) = Conf(R, c) = c i=c s i c i=c 1 (2) Supp(R, c) Avg c c Supp(R, c ) where Avg c c Supp(R, c ) indicates the average value of all support values Supp(R, c ) where c c. Intuitively, a large Supp(R, c) indicates that R generally has large occurrence numbers on images of class c, and a large Conf(R, c) implies small occurrence numbers of R on images of other classes. Therefore, in order to find discriminative RSets for a class, we want to find the RSets which have both a large support and a large confidence value on this class. However, it is computationally expensive to evaluate support and confidence values for all RSets, because the number of relationship sets is extremely large. In the third pyramid level of our image representation, we have 16 image sub-regions and 600 codewords (200 for each local patch size). Therefore, only at this level, there are = 9600 RUnits. Because we have to consider all possible combination of RUnits, the total number of potential RSets is In order to effectively explore this large space, we apply a data mining method [1], which enables us to obtain a set of discriminative RSets for each class efficiently. Input: Support threshold T Supp and confidence threshold T Conf. foreach Class do Scan all RUnits, select the RUnits with support values larger than T Supp as 1-RSets; for p = 2 to P do Generate candidate p-rsets based on the selected (p 1)-RSets; Scan all candidate p-rsets and remove the p RSets if the support values are smaller than T Supp ; if The number of p-rsets <2 then break; end end Scan all selected RSets, remove the RSets whose confidence values are smaller than T Conf. end Algorithm 1: The Apriori mining algorithm. P is the total number of RUnits. (3) 103
5 4.2. The Apriori Algorithm for Feature Mining Apriori [1] is a data mining algorithm. The basic idea behind the Apriori algorithm is that, if an RSet has large support value, then any subset of that RSet must also have large support value. The Apriori [1] algorithm consists of two steps. The first step consists of several passes. The first pass finds all 1-RSets whose support values are larger than a threshold T Supp. Then in a subsequent pass p, the algorithm first generates a set of candidate p-rsets based on the selected (p 1)-RSets, then computes the support value for each candidate p-rset and remove the p-rsets whose support values are smaller than T Supp. This step stops in the pass where no more RSets are generated. In the second step of the algorithm, confidence values are computed for all selected RSets, those with confidence values smaller than a threshold T Conf will be removed. An overview of the Apriori algorithm is shown in Algorithm 1. Implementation Details. In our implementation, we fix the value of T Conf to 0.005, and use different values of T Supp for different classes. The value of T Supp for a class c is determined as follows. The support values and confidence values of all RUnits in the first pyramid level (without partitioning it into sub-regions) are computed. Then we select the RUnit with confidence values larger than T Conf = 0.005, and rank their support values in a descending order. T Supp for class c will be set as the 20-th largest value in this ranking. If the number of RUnits with larger confidence values is smaller than 20, then we set T Supp to Scene Classification with RSets In this section, we describe how to build classifiers for scene classification based on the mined RSets. For each image I, we compute the occurrence number of all mined RSets within this image. Therefore each image can be represented as a D-dimensional vector, where D is the total number of mined RSets. Our classifier is an SVM with a histogram-intersection kernel that is trained on the D- dimensional vectors of all training images. Given two histograms I 1 and I 2, the histogram intersection kernel is computed by D κ = min ( I1 d, I2 d ) (4) d=1 where I d 1 is the value of the d-th bin in histogram I Experiments We carry out experiments on the fifteen scene categories data set from [8]. The dataset contains grayscale images of the following scene classes: highway, inside of cities, tall buildings, streets, suburb residence, forest, coast, mountain, bedroom s u b u r b industrial kitchen living room coast forest highway inside city mountain open country street tall building office s t o r e kitchen industrial suburb bedroom store office tallbuilding street opencountry mountain insidecity highway fores t coas t livingroom Figure 4. Confusion matrix of our approach on the scene category data set. Average classification results of 10 experiment runs are listed. The entry in the i-th row and j-th column is the percentage of images from class i that are classified as class j. open country, bedroom, kitchen, living room, office, industrial, and store. Each class has around images, and the average image size is approximately pixels. This is one of the most complete natural scene category data set used in the literature so far. We use the same experiment setup as that in [8]. For each class, 100 images are randomly selected for training, and the remaining images are used for testing. We use the SVM light package [7] to train our SVM classifier. We report performance accuracy as an average of 10 runs. Table 1 shows the recognition accuracy of our approach. The Single-level column summarizes the recognition accuracy when using patches and relations from a single pyramid level. The second column, labeled as Pyramid, summarizes the performance of our method when using patches and relationships extracted from all levels in the pyramid. We note that our method exhibits competitive performance to the state-of-the art results from [8]. We attribute such performance improvement to our stronger representation of spatial relationships among image patches. Finally, recognition accuracy of each single level of our approach is also higher than the results in [8]. This is because the multi-scale local patch description can capture more information from the image. The confusion matrix of our approach is shown in Figure 4. Our method tends to confuse visually scene classes, for example: bedroom vs. living room, kitchen vs. living room, and coast vs. open country. Some mined relationships are shown in Figure 5. For each class, we only show the relationship of two codewords 104
6 Method Accuracy Result in [2] 65.2 Result in [8]: Single-level Pyramid Level ± ± 0.3 Level ± ± 0.5 Level ± ± 0.5 Our Method: Single-level Pyramid Level ± ± 0.6 Level ± ± 0.5 Level ± ± 0.6 Table 1. Recognition accuracy for different methods. The accuracy in [2] is measured in only 13 categories. on the pyramid level that corresponds to 2 2 sub-regions. We observe that our approach can obtain some adjectives and prepositions with semantic meanings, e.g. sky water in the coast scene, sky grass and trees in the suburb scene. 7. Conclusion This paper presents an approach to automatically mine adjectives and prepositions for natural scene recognition. Our method is based on an image representation that is built upon multi-scale image patches and a spatial pyramid. We apply a data mining approach to obtain a set of adjectives and prepositions, and combinations of adjectives and prepositions that are discriminative for the scene classification task. An interesting direction for future research would explore methods to automatically link the mined relationships to semantic descriptions in natural language. 8. Acknowledgements The authors would like to thank Jia Li and Hao Su for the helpful discussions and comments. Li Fei-Fei is funded by a Microsoft Research fellowship and a Google award. References [1] R. Agrawal and R. Srikant. Fast algorithms for mining association rules. In Proc. VLDB, pages , , 4, 5 [2] L. Fei-Fei and P. Perona. A bayesian hierarchical model for learning natural scene categories. In Proc. CVPR, volume 2, pages , , 6 [3] P. F. Felzenszwalb and D. P. Huttenlocher. Efficient matching of pictorial structures. In Proc. CVPR, volume 2, pages 66 73, [4] R. Fergus, P. Perona, and A. Zisserman. Object class recognition by unsupervised scale-invariant learning. In Proc. CVPR, volume 2, pages , [5] K. Grauman and T. Darrell. The pyramid match kernel: Discriminative classification with sets of image features. In Proc. ICCV, volume 2, pages , [6] A. Gupta and L. S. Davis. Beyond nouns: Exploiting prepositions and comparative adjectives for learning visual classifiers. In Proc. ECCV, volume 1, pages 16 29, [7] T. Joachims. Making large-scale svm learning practical. Advances in kernel methods - support vector machines. B. Schölkopf, C. Burges, A. Smola (ed.), MIT press, [8] S. Lazebnik, C. Schmid, and J. Ponce. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. In Proc. CVPR, volume 2, pages , , 3, 5, 6 [9] D. G. Lowe. Object recognition from local scaleinvariant features. In Proc. ICCV, volume 2, pages , [10] T. Malisiewicz and A. A. Efros. Improving spatial support for objects via multiple segmentations. In Proc. BMVC, [11] D. Parikh, C. L. Zitnick, and T. Chen. From appearance to context-based recognition: Dense labeling in small images. In Proc. CVPR, [12] T. Quack, V. Ferrari, B. Leibe, and L. V. Gool. Efficient mining of frequent and distinctive feature configurations. In Proc. ICCV, [13] A. Rabinovich, A. Vedaldi, C. Galleguillos, E. Wiewiora, and S. Belongie. Objects in context. In Proc. ICCV, [14] S. Savarese, J. Winn, and A. Criminisi. Discriminative object class models of appearance and shape by correlatons. In Proc. CVPR, volume 2, pages , [15] J. Sivic, B. C. Russell, A. A. Efros, A. Zisserman, and W. T. Freeman. Discovering objects and their location in images. In Proc. ICCV, volume 1, pages , [16] J. Sivic, B. C. Russell, A. Zisserman, W. T. Freeman, and A. A. Efros. Unsupervised discovery of visual object class hierarchies. In Proc. CVPR, [17] C. Wallraven, B. Caputo, and A. Graf. Recognition with local features: The kernel recipe. In Proc. ICCV, volume 1, pages , [18] M. Weber, M. Welling, and P. Perona. Unsupervised learning of models for recognition. In Proc. ECCV, pages 18 32, [19] J. Yuan, Y. Wu, and M. Yang. Discovery of collocation patterns: from visual words to visual phrases. In Proc. CVPR,





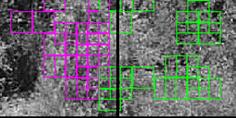

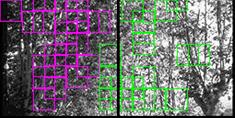



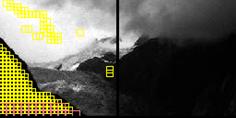
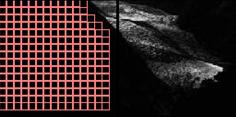








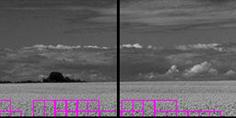





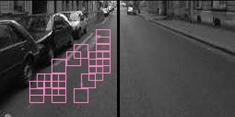
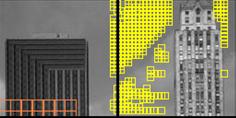



7 mountain coast street forest store kitchen living room open country inside city industrial suburb tall building highway office bedroom Figure 5. Examples of adjectives and prepositions that are inferred from the mined results. The image patches that are assigned to the same codeword are labeled with the same color. For example, in the coast images we show the relationship that yellow patches (sky) appear cyan patches (water). In the tall building images we show the relationship that the texture of yellow patches (sky) is than the orange patches (building). 106
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
arxiv: v3 [cs.cv] 3 Oct 2012
![arxiv: v3 [cs.cv] 3 Oct 2012](/thumbs/96/128756091.jpg "arxiv: v3 [cs.cv] 3 Oct 2012") Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Spatial Latent Dirichlet Allocation
 Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING. Wei Liu, Serkan Kiranyaz and Moncef Gabbouj
 Proceedings of the 5th International Symposium on Communications, Control and Signal Processing, ISCCSP 2012, Rome, Italy, 2-4 May 2012 ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING
Proceedings of the 5th International Symposium on Communications, Control and Signal Processing, ISCCSP 2012, Rome, Italy, 2-4 May 2012 ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Comparing Local Feature Descriptors in plsa-based Image Models
 Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Improved Spatial Pyramid Matching for Image Classification
 Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Kernel Codebooks for Scene Categorization
 Kernel Codebooks for Scene Categorization Jan C. van Gemert, Jan-Mark Geusebroek, Cor J. Veenman, and Arnold W.M. Smeulders Intelligent Systems Lab Amsterdam (ISLA), University of Amsterdam, Kruislaan
Kernel Codebooks for Scene Categorization Jan C. van Gemert, Jan-Mark Geusebroek, Cor J. Veenman, and Arnold W.M. Smeulders Intelligent Systems Lab Amsterdam (ISLA), University of Amsterdam, Kruislaan
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
Class 5: Attributes and Semantic Features
 Class 5: Attributes and Semantic Features Rogerio Feris, Feb 21, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Project
Class 5: Attributes and Semantic Features Rogerio Feris, Feb 21, 2013 EECS 6890 Topics in Information Processing Spring 2013, Columbia University http://rogerioferis.com/visualrecognitionandsearch Project
Determining Patch Saliency Using Low-Level Context
 Determining Patch Saliency Using Low-Level Context Devi Parikh 1, C. Lawrence Zitnick 2, and Tsuhan Chen 1 1 Carnegie Mellon University, Pittsburgh, PA, USA 2 Microsoft Research, Redmond, WA, USA Abstract.
Determining Patch Saliency Using Low-Level Context Devi Parikh 1, C. Lawrence Zitnick 2, and Tsuhan Chen 1 1 Carnegie Mellon University, Pittsburgh, PA, USA 2 Microsoft Research, Redmond, WA, USA Abstract.
Visual words. Map high-dimensional descriptors to tokens/words by quantizing the feature space.
 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
CPPP/UFMS at ImageCLEF 2014: Robot Vision Task
 CPPP/UFMS at ImageCLEF 2014: Robot Vision Task Rodrigo de Carvalho Gomes, Lucas Correia Ribas, Amaury Antônio de Castro Junior, Wesley Nunes Gonçalves Federal University of Mato Grosso do Sul - Ponta Porã
CPPP/UFMS at ImageCLEF 2014: Robot Vision Task Rodrigo de Carvalho Gomes, Lucas Correia Ribas, Amaury Antônio de Castro Junior, Wesley Nunes Gonçalves Federal University of Mato Grosso do Sul - Ponta Porã
Spatial Hierarchy of Textons Distributions for Scene Classification
 Spatial Hierarchy of Textons Distributions for Scene Classification S. Battiato 1, G. M. Farinella 1, G. Gallo 1, and D. Ravì 1 Image Processing Laboratory, University of Catania, IT {battiato, gfarinella,
Spatial Hierarchy of Textons Distributions for Scene Classification S. Battiato 1, G. M. Farinella 1, G. Gallo 1, and D. Ravì 1 Image Processing Laboratory, University of Catania, IT {battiato, gfarinella,
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Randomized Spatial Partition for Scene Recognition
 Randomized Spatial Partition for Scene Recognition Yuning Jiang, Junsong Yuan, and Gang Yu School of Electrical and Electronics Engineering Nanyang Technological University, Singapore 639798 {ynjiang,jsyuan}@ntu.edu.sg,
Randomized Spatial Partition for Scene Recognition Yuning Jiang, Junsong Yuan, and Gang Yu School of Electrical and Electronics Engineering Nanyang Technological University, Singapore 639798 {ynjiang,jsyuan}@ntu.edu.sg,
Modeling Image Context using Object Centered Grid
 Modeling Image Context using Object Centered Grid Sobhan Naderi Parizi, Ivan Laptev, Alireza Tavakoli Targhi Computer Vision and Active Perception Laboratory Royal Institute of Technology (KTH) SE-100
Modeling Image Context using Object Centered Grid Sobhan Naderi Parizi, Ivan Laptev, Alireza Tavakoli Targhi Computer Vision and Active Perception Laboratory Royal Institute of Technology (KTH) SE-100
Scene Recognition using Bag-of-Words
 Scene Recognition using Bag-of-Words Sarthak Ahuja B.Tech Computer Science Indraprastha Institute of Information Technology Okhla, Delhi 110020 Email: sarthak12088@iiitd.ac.in Anchita Goel B.Tech Computer
Scene Recognition using Bag-of-Words Sarthak Ahuja B.Tech Computer Science Indraprastha Institute of Information Technology Okhla, Delhi 110020 Email: sarthak12088@iiitd.ac.in Anchita Goel B.Tech Computer
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Feature Selection using Constellation Models
 Feature Selection using Constellation Models Heydar Maboudi Afkham, Carl Herik Ek and Stefan Calsson Computer Vision and Active Perception Lab. Royal Institute of Technology (KTH) Stockholm, Sweden {heydarma,chek,stefanc}@csc.kth.se
Feature Selection using Constellation Models Heydar Maboudi Afkham, Carl Herik Ek and Stefan Calsson Computer Vision and Active Perception Lab. Royal Institute of Technology (KTH) Stockholm, Sweden {heydarma,chek,stefanc}@csc.kth.se
Introduction to object recognition. Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others
 Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Introduction to object recognition Slides adapted from Fei-Fei Li, Rob Fergus, Antonio Torralba, and others Overview Basic recognition tasks A statistical learning approach Traditional or shallow recognition
Part-based models. Lecture 10
 Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Part-based models Lecture 10 Overview Representation Location Appearance Generative interpretation Learning Distance transforms Other approaches using parts Felzenszwalb, Girshick, McAllester, Ramanan
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Discriminative Object Class Models of Appearance and Shape by Correlatons
 Discriminative Object Class Models of Appearance and Shape by Correlatons S. Savarese, J. Winn, A. Criminisi University of Illinois at Urbana-Champaign Microsoft Research Ltd., Cambridge, CB3 0FB, United
Discriminative Object Class Models of Appearance and Shape by Correlatons S. Savarese, J. Winn, A. Criminisi University of Illinois at Urbana-Champaign Microsoft Research Ltd., Cambridge, CB3 0FB, United
A Hierarchical Model of Shape and Appearance for Human Action Classification
 A Hierarchical Model of Shape and Appearance for Human Action Classification Juan Carlos Niebles Universidad del Norte, Colombia University of Illinois at Urbana-Champaign, USA jnieble2@uiuc.edu Li Fei-Fei
A Hierarchical Model of Shape and Appearance for Human Action Classification Juan Carlos Niebles Universidad del Norte, Colombia University of Illinois at Urbana-Champaign, USA jnieble2@uiuc.edu Li Fei-Fei
Combining Selective Search Segmentation and Random Forest for Image Classification
 Combining Selective Search Segmentation and Random Forest for Image Classification Gediminas Bertasius November 24, 2013 1 Problem Statement Random Forest algorithm have been successfully used in many
Combining Selective Search Segmentation and Random Forest for Image Classification Gediminas Bertasius November 24, 2013 1 Problem Statement Random Forest algorithm have been successfully used in many
Object Detection Using Segmented Images
 Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Efficient Category Mining by Leveraging Instance Retrieval
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Efficient Category Mining by Leveraging Instance Retrieval Abhinav Goel Mayank Juneja C. V. Jawahar Center for Visual Information
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Efficient Category Mining by Leveraging Instance Retrieval Abhinav Goel Mayank Juneja C. V. Jawahar Center for Visual Information
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories
 Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce CVR-TR-2005-04 Abstract This paper presents a method for recognizing
Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce CVR-TR-2005-04 Abstract This paper presents a method for recognizing
Unsupervised Identification of Multiple Objects of Interest from Multiple Images: discover
 Unsupervised Identification of Multiple Objects of Interest from Multiple Images: discover Devi Parikh and Tsuhan Chen Carnegie Mellon University {dparikh,tsuhan}@cmu.edu Abstract. Given a collection of
Unsupervised Identification of Multiple Objects of Interest from Multiple Images: discover Devi Parikh and Tsuhan Chen Carnegie Mellon University {dparikh,tsuhan}@cmu.edu Abstract. Given a collection of
Fast Kernel Learning for Spatial Pyramid Matching
 Fast Kernel Learning for Spatial Pyramid Matching Junfeng He, Shih-Fu Chang Department of Electrical Engineering Columbia University, New York, NY 10027 jh2700,sfchang@columbia.edu Lexing Xie IBM T.J.
Fast Kernel Learning for Spatial Pyramid Matching Junfeng He, Shih-Fu Chang Department of Electrical Engineering Columbia University, New York, NY 10027 jh2700,sfchang@columbia.edu Lexing Xie IBM T.J.
Pattern recognition (3)
") Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
Pattern recognition (3) 1 Things we have discussed until now Statistical pattern recognition Building simple classifiers Supervised classification Minimum distance classifier Bayesian classifier Building
CV as making bank. Intel buys Mobileye! $15 billion. Mobileye:
 CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
CV as making bank Intel buys Mobileye! $15 billion Mobileye: Spin-off from Hebrew University, Israel 450 engineers 15 million cars installed 313 car models June 2016 - Tesla left Mobileye Fatal crash car
CLASSIFICATION Experiments
 CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
A Hierarchical Conditional Random Field Model for Labeling and Segmenting Images of Street Scenes
 A Hierarchical Conditional Random Field Model for Labeling and Segmenting Images of Street Scenes Qixing Huang Stanford University huangqx@stanford.edu Mei Han Google Inc. meihan@google.com Bo Wu Google
A Hierarchical Conditional Random Field Model for Labeling and Segmenting Images of Street Scenes Qixing Huang Stanford University huangqx@stanford.edu Mei Han Google Inc. meihan@google.com Bo Wu Google
High Level Computer Vision
 High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
High Level Computer Vision Part-Based Models for Object Class Recognition Part 2 Bernt Schiele - schiele@mpi-inf.mpg.de Mario Fritz - mfritz@mpi-inf.mpg.de http://www.d2.mpi-inf.mpg.de/cv Please Note No
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Selective Search for Object Recognition
 Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
Selective Search for Object Recognition Uijlings et al. Schuyler Smith Overview Introduction Object Recognition Selective Search Similarity Metrics Results Object Recognition Kitten Goal: Problem: Where
arxiv: v1 [cs.lg] 20 Dec 2013
![arxiv: v1 [cs.lg] 20 Dec 2013](/thumbs/89/99594013.jpg "arxiv: v1 [cs.lg] 20 Dec 2013") Unsupervised Feature Learning by Deep Sparse Coding Yunlong He Koray Kavukcuoglu Yun Wang Arthur Szlam Yanjun Qi arxiv:1312.5783v1 [cs.lg] 20 Dec 2013 Abstract In this paper, we propose a new unsupervised
Unsupervised Feature Learning by Deep Sparse Coding Yunlong He Koray Kavukcuoglu Yun Wang Arthur Szlam Yanjun Qi arxiv:1312.5783v1 [cs.lg] 20 Dec 2013 Abstract In this paper, we propose a new unsupervised
Large-scale visual recognition The bag-of-words representation
 Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
A Survey on Image Classification using Data Mining Techniques Vyoma Patel 1 G. J. Sahani 2
 IJSRD - International Journal for Scientific Research & Development Vol. 2, Issue 10, 2014 ISSN (online): 2321-0613 A Survey on Image Classification using Data Mining Techniques Vyoma Patel 1 G. J. Sahani
IJSRD - International Journal for Scientific Research & Development Vol. 2, Issue 10, 2014 ISSN (online): 2321-0613 A Survey on Image Classification using Data Mining Techniques Vyoma Patel 1 G. J. Sahani
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Kernels for Visual Words Histograms
 Kernels for Visual Words Histograms Radu Tudor Ionescu and Marius Popescu Faculty of Mathematics and Computer Science University of Bucharest, No. 14 Academiei Street, Bucharest, Romania {raducu.ionescu,popescunmarius}@gmail.com
Kernels for Visual Words Histograms Radu Tudor Ionescu and Marius Popescu Faculty of Mathematics and Computer Science University of Bucharest, No. 14 Academiei Street, Bucharest, Romania {raducu.ionescu,popescunmarius}@gmail.com
Recognition of Animal Skin Texture Attributes in the Wild. Amey Dharwadker (aap2174) Kai Zhang (kz2213)
 Kai Zhang (kz2213)") Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Recognition of Animal Skin Texture Attributes in the Wild Amey Dharwadker (aap2174) Kai Zhang (kz2213) Motivation Patterns and textures are have an important role in object description and understanding
Bundling Features for Large Scale Partial-Duplicate Web Image Search
 Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Scene Classification with Low-dimensional Semantic Spaces and Weak Supervision
 Scene Classification with Low-dimensional Semantic Spaces and Weak Supervision Nikhil Rasiwasia Nuno Vasconcelos Department of Electrical and Computer Engineering University of California, San Diego nikux@ucsd.edu,
Scene Classification with Low-dimensional Semantic Spaces and Weak Supervision Nikhil Rasiwasia Nuno Vasconcelos Department of Electrical and Computer Engineering University of California, San Diego nikux@ucsd.edu,
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
CS229: Action Recognition in Tennis
 CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
CS229: Action Recognition in Tennis Aman Sikka Stanford University Stanford, CA 94305 Rajbir Kataria Stanford University Stanford, CA 94305 asikka@stanford.edu rkataria@stanford.edu 1. Motivation As active
Max-Margin Dictionary Learning for Multiclass Image Categorization
 Max-Margin Dictionary Learning for Multiclass Image Categorization Xiao-Chen Lian 1, Zhiwei Li 3, Bao-Liang Lu 1,2, and Lei Zhang 3 1 Dept. of Computer Science and Engineering, Shanghai Jiao Tong University,
Max-Margin Dictionary Learning for Multiclass Image Categorization Xiao-Chen Lian 1, Zhiwei Li 3, Bao-Liang Lu 1,2, and Lei Zhang 3 1 Dept. of Computer Science and Engineering, Shanghai Jiao Tong University,
Unsupervised discovery of category and object models. The task
 Unsupervised discovery of category and object models Martial Hebert The task 1 Common ingredients 1. Generate candidate segments 2. Estimate similarity between candidate segments 3. Prune resulting (implicit)
Unsupervised discovery of category and object models Martial Hebert The task 1 Common ingredients 1. Generate candidate segments 2. Estimate similarity between candidate segments 3. Prune resulting (implicit)
HIGH spatial resolution Earth Observation (EO) images
 images") JOURNAL OF L A TEX CLASS FILES, VOL. 6, NO., JANUARY 7 A Comparative Study of Bag-of-Words and Bag-of-Topics Models of EO Image Patches Reza Bahmanyar, Shiyong Cui, and Mihai Datcu, Fellow, IEEE Abstract
JOURNAL OF L A TEX CLASS FILES, VOL. 6, NO., JANUARY 7 A Comparative Study of Bag-of-Words and Bag-of-Topics Models of EO Image Patches Reza Bahmanyar, Shiyong Cui, and Mihai Datcu, Fellow, IEEE Abstract
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Beyond bags of Features
 Beyond bags of Features Spatial Pyramid Matching for Recognizing Natural Scene Categories Camille Schreck, Romain Vavassori Ensimag December 14, 2012 Schreck, Vavassori (Ensimag) Beyond bags of Features
Beyond bags of Features Spatial Pyramid Matching for Recognizing Natural Scene Categories Camille Schreck, Romain Vavassori Ensimag December 14, 2012 Schreck, Vavassori (Ensimag) Beyond bags of Features
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Beyond bags of features: spatial pyramid matching for recognizing natural scene categories
 Beyond bags of features: spatial pyramid matching for recognizing natural scene categories Svetlana Lazebnik, Cordelia Schmid, Jean Ponce To cite this version: Svetlana Lazebnik, Cordelia Schmid, Jean
Beyond bags of features: spatial pyramid matching for recognizing natural scene categories Svetlana Lazebnik, Cordelia Schmid, Jean Ponce To cite this version: Svetlana Lazebnik, Cordelia Schmid, Jean
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION. Maral Mesmakhosroshahi, Joohee Kim
 IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
IMPROVING SPATIO-TEMPORAL FEATURE EXTRACTION TECHNIQUES AND THEIR APPLICATIONS IN ACTION CLASSIFICATION Maral Mesmakhosroshahi, Joohee Kim Department of Electrical and Computer Engineering Illinois Institute
Probabilistic Generative Models for Machine Vision
 Probabilistic Generative Models for Machine Vision bacciu@di.unipi.it Dipartimento di Informatica Università di Pisa Corso di Intelligenza Artificiale Prof. Alessandro Sperduti Università degli Studi di
Probabilistic Generative Models for Machine Vision bacciu@di.unipi.it Dipartimento di Informatica Università di Pisa Corso di Intelligenza Artificiale Prof. Alessandro Sperduti Università degli Studi di
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Semantic-based image analysis with the goal of assisting artistic creation
 Semantic-based image analysis with the goal of assisting artistic creation Pilar Rosado 1, Ferran Reverter 2, Eva Figueras 1, and Miquel Planas 1 1 Fine Arts Faculty, University of Barcelona, Spain, pilarrosado@ub.edu,
Semantic-based image analysis with the goal of assisting artistic creation Pilar Rosado 1, Ferran Reverter 2, Eva Figueras 1, and Miquel Planas 1 1 Fine Arts Faculty, University of Barcelona, Spain, pilarrosado@ub.edu,
Self Lane Assignment Using Smart Mobile Camera For Intelligent GPS Navigation and Traffic Interpretation
 For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
For Intelligent GPS Navigation and Traffic Interpretation Tianshi Gao Stanford University tianshig@stanford.edu 1. Introduction Imagine that you are driving on the highway at 70 mph and trying to figure
Patch-Based Image Classification Using Image Epitomes
 Patch-Based Image Classification Using Image Epitomes David Andrzejewski CS 766 - Final Project December 19, 2005 Abstract Automatic image classification has many practical applications, including photo
Patch-Based Image Classification Using Image Epitomes David Andrzejewski CS 766 - Final Project December 19, 2005 Abstract Automatic image classification has many practical applications, including photo
SEMANTIC SEGMENTATION AS IMAGE REPRESENTATION FOR SCENE RECOGNITION. Ahmed Bassiouny, Motaz El-Saban. Microsoft Advanced Technology Labs, Cairo, Egypt
 SEMANTIC SEGMENTATION AS IMAGE REPRESENTATION FOR SCENE RECOGNITION Ahmed Bassiouny, Motaz El-Saban Microsoft Advanced Technology Labs, Cairo, Egypt ABSTRACT We introduce a novel approach towards scene
SEMANTIC SEGMENTATION AS IMAGE REPRESENTATION FOR SCENE RECOGNITION Ahmed Bassiouny, Motaz El-Saban Microsoft Advanced Technology Labs, Cairo, Egypt ABSTRACT We introduce a novel approach towards scene
Frequent Inner-Class Approach: A Semi-supervised Learning Technique for One-shot Learning
 Frequent Inner-Class Approach: A Semi-supervised Learning Technique for One-shot Learning Izumi Suzuki, Koich Yamada, Muneyuki Unehara Nagaoka University of Technology, 1603-1, Kamitomioka Nagaoka, Niigata
Frequent Inner-Class Approach: A Semi-supervised Learning Technique for One-shot Learning Izumi Suzuki, Koich Yamada, Muneyuki Unehara Nagaoka University of Technology, 1603-1, Kamitomioka Nagaoka, Niigata
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Latest development in image feature representation and extraction
 International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 2; Issue 1; January 2017; Page No. 05-09 Latest development in image
International Journal of Advanced Research and Development ISSN: 2455-4030, Impact Factor: RJIF 5.24 www.advancedjournal.com Volume 2; Issue 1; January 2017; Page No. 05-09 Latest development in image
Experiments of Image Retrieval Using Weak Attributes
 Columbia University Computer Science Department Technical Report # CUCS 005-12 (2012) Experiments of Image Retrieval Using Weak Attributes Felix X. Yu, Rongrong Ji, Ming-Hen Tsai, Guangnan Ye, Shih-Fu
Columbia University Computer Science Department Technical Report # CUCS 005-12 (2012) Experiments of Image Retrieval Using Weak Attributes Felix X. Yu, Rongrong Ji, Ming-Hen Tsai, Guangnan Ye, Shih-Fu
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Dynamic Scene Classification using Spatial and Temporal Cues
 2013 IEEE International Conference on Computer Vision Workshops Dynamic Scene Classification using Spatial and Temporal Cues Arun Balajee Vasudevan, Srikanth Muralidharan, Shiva Pratheek Chintapalli Indian
2013 IEEE International Conference on Computer Vision Workshops Dynamic Scene Classification using Spatial and Temporal Cues Arun Balajee Vasudevan, Srikanth Muralidharan, Shiva Pratheek Chintapalli Indian
Segmentation. Bottom up Segmentation Semantic Segmentation
 Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Segmentation Bottom up Segmentation Semantic Segmentation Semantic Labeling of Street Scenes Ground Truth Labels 11 classes, almost all occur simultaneously, large changes in viewpoint, scale sky, road,
Learning the Compositional Nature of Visual Objects
 Learning the Compositional Nature of Visual Objects Björn Ommer Joachim M. Buhmann Institute of Computational Science, ETH Zurich 8092 Zurich, Switzerland bjoern.ommer@inf.ethz.ch jbuhmann@inf.ethz.ch
Learning the Compositional Nature of Visual Objects Björn Ommer Joachim M. Buhmann Institute of Computational Science, ETH Zurich 8092 Zurich, Switzerland bjoern.ommer@inf.ethz.ch jbuhmann@inf.ethz.ch
Action recognition in videos
 Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Action recognition in videos Cordelia Schmid INRIA Grenoble Joint work with V. Ferrari, A. Gaidon, Z. Harchaoui, A. Klaeser, A. Prest, H. Wang Action recognition - goal Short actions, i.e. drinking, sit
Image-to-Class Distance Metric Learning for Image Classification
 Image-to-Class Distance Metric Learning for Image Classification Zhengxiang Wang, Yiqun Hu, and Liang-Tien Chia Center for Multimedia and Network Technology, School of Computer Engineering Nanyang Technological
Image-to-Class Distance Metric Learning for Image Classification Zhengxiang Wang, Yiqun Hu, and Liang-Tien Chia Center for Multimedia and Network Technology, School of Computer Engineering Nanyang Technological