Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories
|
|
|
- David Blankenship
- 5 years ago
- Views:
Transcription
1 Beyond Bags of Features: Spatial Pyramid Matching for Recognizing Natural Scene Categories Svetlana Lazebnik, Cordelia Schmid, and Jean Ponce CVR-TR Abstract This paper presents a method for recognizing scene categories based on approximate global geometric correspondence. This technique works by partitioning the image into increasingly fine sub-regions and computing histograms of local features found inside each sub-region. The resulting spatial pyramid is a simple and computationally efficient extension of an orderless bag-of-features image representation, and it shows significantly improved performance on challenging scene categorization tasks. Specifically, our proposed method exceeds the state of the art on the Caltech-101 database and achieves high accuracy on a large database of fifteen natural scene categories. The spatial pyramid framework also offers insights into the success of several recently proposed image descriptions, including Torralba s gist and Lowe s SIFT descriptors. 1. Introduction In this paper, we consider the problem of recognizing the semantic category of an image. For example, we may want to classify a photograph as depicting a scene (forest, street, office, etc.) or as containing a certain object of interest. For such whole-image categorization tasks, bag-offeatures methods, which represent an image as an orderless collection of local features, have recently demonstrated impressive levels of performance [5, 21, 22, 23]. However, because these methods disregard all information about the spatial layout of the features, they have severely limited descriptive ability. In particular, they are incapable of capturing shape or of segmenting an object from its background. Unfortunately, overcoming these limitations to build effective structural object descriptions has proven to be quite challenging, especially when the recognition system must be made to work in the presence of heavy clutter, occlusion, or large viewpoint changes. Approaches based on generative part models [10, 3] and geometric correspondence search [1, 9] achieve robustness at significant computational expense. A more efficient approach is to augment a basic bag-of-features representation with pairwise relations between neighboring local features, but existing implementations of this idea [9, 17] have yielded inconclusive results. One other strategy for increasing robustness to geometric deformations is to increase the level of invariance of local features (e.g., by using affine-invariant detectors), but a recent large-scale evaluation [23] suggests that this strategy usually does not pay off. Though we remain sympathetic to the goal of developing robust and geometrically invariant structural object representations, we propose in this paper to revisit global non-invariant representations based on aggregating statistics of local features over fixed subregions. We introduce a kernel-based recognition method that works by computing rough geometric correspondence on a global scale using an efficient approximation technique adapted from the pyramid matching scheme of Grauman and Darrell [5]. Our method involves repeatedly subdividing the image and computing histograms of local features at increasingly fine resolutions. As shown by experiments in Section 5, this simple operation suffices to significantly improve performance over a basic bag-of-features representation, and even over methods based on detailed geometric correspondence. Previous research has shown that statistical properties of the scene considered in a holistic fashion, without any analysis of its constituent objects, yield a rich set of cues to its semantic category [13]. Our own experiments confirm that global representations can be surprisingly effective not only for identifying the overall scene, but also for categorizing images as containing specific objects, even when these objects are embedded in heavy clutter and vary significantly in pose and appearance. This said, we do not advocate the direct use of a global method for object recognition (except for very restricted sorts of imagery). Instead, we envision a subordinate role for this method. It may be used to capture the gist of an image [20] and to inform the subsequent search for specific objects (e.g., if the image, based on its global description, is likely to be a highway, we have a high probability of finding a car, but not a toaster). In addition, the simplicity and efficiency of our proposed method, in combination with its tendency to yield unexpect-
2 edly high recognition rates on seemingly challenging data, could make it a good baseline for calibrating newly acquired datasets and for evaluating more sophisticated recognition approaches. 2. Previous Work In computer vision, histograms have a long history as a method for image description (see, e.g., [16, 18]). Koenderink and Van Doorn [8] have generalized histograms to locally orderless images, or histogram-valued scale spaces (i.e., for each Gaussian aperture at a given location and scale, the locally orderless image returns the histogram of image features aggregated over that aperture). Our spatial pyramid approach can be thought of as an alternative formulation of a locally orderless image, where instead of a Gaussian scale space of apertures, we define a fixed hierarchy of rectangular windows. Koenderink and Van Doorn have argued persuasively that locally orderless images play an important role in visual perception. Our retrieval experiments (Fig. 4) confirm that spatial pyramids can capture perceptually salient features and suggest that locally orderless matching may be a powerful mechanism for estimating overall perceptual similarity between images. It is important to contrast our proposed approach with multiresolution histograms [6], which involve repeatedly subsampling an image and computing a global histogram of pixel values at each new level. In other words, a multiresolution histogram varies the resolution at which the features (intensity values) are computed, but the histogram resolution (intensity scale) stays fixed. We take the opposite approach of fixing the resolution at which the features are computed, but varying the spatial resolution at which they are aggregated. This results in a higher-dimensional representation that preserves more information (e.g., an image consisting of thin black and white stripes would retain two modes at every level of a spatial pyramid, whereas it would become indistinguishable from a uniformly gray image at all but the finest levels of a multiresolution histogram). Finally, unlike a multiresolution histogram, a spatial pyramid, when equipped with an appropriate kernel, can be used for approximate geometric matching. The operation of subdivide and disorder i.e., partition the image into subblocks and compute histograms (or histogram statistics, such as means) of local features in these subblocks has been practiced numerous times in computer vision, both for global image description [4, 19, 20] and for local description of interest regions [12]. Thus, though the operation itself seems fundamental, previous methods leave open the question of what is the right subdivision scheme (although a regular 4 4 grid seems to be the most popular implementation choice), and what is the right balance between subdividing and disordering. The spatial pyramid framework suggests a possible way to address this issue: namely, the best results may be achieved when multiple resolutions are combined in a principled way. It also suggests that the reason for the empirical success of subdivide and disorder techniques is the fact that they actually perform approximate geometric matching. 3. Spatial Pyramid Matching We first describe the original formulation of pyramid matching [5], and then introduce our application of this framework to create a spatial pyramid image representation Pyramid Match Kernels Let X and Y be two sets of vectors in a d-dimensional feature space. Grauman and Darrell [5] propose pyramid matching to find an approximate correspondence between these two sets. Informally, pyramid matching works by placing a sequence of increasingly coarser grids over the feature space and taking a weighted sum of the number of matches that occur at each level of resolution. At any fixed resolution, two points are said to match if they fall into the same cell of the grid; matches found at finer resolutions are weighted more highly than matches found at coarser resolutions. More specifically, we construct a sequence of grids at resolutions 0,...,L, such that the grid at level l has 2 l cells along each dimension, for a total of D =2 dl cells. Let HX l and Hl Y denote the histograms of X and Y at this resolution, so that HX l (i) and Hl Y (i) are the numbers of points from X and Y that fall into the ith cell of the grid. Then the number of matches at level l is given by the histogram intersection function [18]: D I(HX,H l Y l )= min ( HX(i),H l Y l (i) ). (1) i=1 In the following, we will abbreviate I(HX l,hl Y ) to Il. Note that the number of matches found at level l also includes all the matches found at the finer level l 1. Therefore, the number of new matches found at level l is given by I l I l1 for l =0,...,L 1. The weight associated 1 with level l is set to, which is inversely proportional 2 L l to cell width at that level. Intuitively, we want to penalize matches found in larger cells because they involve increasingly dissimilar features. Putting all the pieces together, we get the following definition of a pyramid match kernel: L 1 κ L (X, Y ) = I L 1 ( I l 2 L l I l1) (2) l=0 = 1 2 L I0 L l=1 1 2 L l1 Il. (3) Both the histogram intersection and the pyramid match kernel are Mercer kernels [5].
3 level 0 level 1 level 2 1/4 1/4 1/2 Figure 1. Toy example of constructing a three-level pyramid. The image has three feature types, indicated by circles, diamonds, and crosses. At the top, we subdivide the image at three different levels of resolution. Next, for each level of resolution and each channel, we count the features that fall in each spatial bin. Finally, we weight each spatial histogram according to eq. (3) Spatial Matching Scheme As introduced in [5], a pyramid match kernel works with an orderless image representation. It allows for precise matching of two collections of features in a highdimensional appearance space, but discards all spatial information. This paper advocates an orthogonal approach: perform pyramid matching in the two-dimensional image space, and use traditional clustering techniques in feature space. 1 Specifically, we quantize all feature vectors into M discrete types, and make the simplifying assumption that only features of the same type can be matched to one another. Each channel m gives us two sets of two-dimensional vectors, X m and Y m, representing the coordinates of features of type m found in the respective images. The final kernel is then the sum of the separate channel kernels: K L (X, Y )= M κ L (X m,y m ). (4) m=1 This approach has the advantage of maintaining continuity with the popular visual vocabulary paradigm in fact, it reduces to a standard bag of features when L =0. Because the pyramid match kernel (3) is simply a weighted sum of histogram intersections, and because c min(a, b) = min(ca, cb) for positive numbers, we can implement K L as a single histogram intersection of long vectors formed by concatenating the appropriately weighted histograms of all channels at all resolutions (Fig. 1). For L levels and M channels, the resulting vector has dimensionality M L l=0 4l = M 1 3 (4L1 1). Several experiments reported in Section 5 use the settings of M = 400 and L =3, resulting in dimensional histogram intersections. However, these operations are efficient because 1 In principle, it is possible to integrate geometric information directly into the original pyramid matching framework by treating image coordinates as two extra dimensions in the feature space. the histogram vectors are extremely sparse (in fact, just as in [5], the computational complexity of the kernel is linear in the number of features). It must also be noted that we did not observe any significant increase in performance beyond M = 200 and L =2, where the concatenated histograms are only 4200-dimensional. The final implementation issue is that of normalization. For maximum computational efficiency, we normalize all histograms by the total weight of all features in the image, in effect forcing the total number of features in all images to be the same. Because we use a dense feature representation (see Section 4), and thus do not need to worry about spurious feature detections resulting from clutter, this practice is sufficient to deal with the effects of variable image size. 4. Feature Extraction This section briefly describes the two kinds of features used in the experiments of Section 5. First, we have socalled weak features, which are oriented edge points, i.e., points whose gradient magnitude in a given direction exceeds a minimum threshold. We extract edge points at two scales and eight orientations, for a total of M =16channels. We designed these features to obtain a representation similar to the gist [20] or to a global SIFT descriptor [12] of the image. For better discriminative power, we also utilize higherdimensional strong features, which are SIFT descriptors of pixel patches computed over a grid with spacing of 8 pixels. Our decision to use a dense regular grid instead of interest points was based on the comparative evaluation of Li and Perona [11], who have shown that dense features work better for scene classification. Intuitively, a dense image description is necessary to capture uniform regions such as sky, calm water, or road surface (to deal with low-contrast regions, we skip the usual SIFT normalization procedure when the overall gradient magnitude of the patch is too weak). We perform k-means clustering of a random subset of patches from the training set to form a visual vocabulary. Typical vocabulary sizes for our experiments are M = 200 and M = Experiments In this section, we report results on three diverse datasets: fifteen scene categories [11], Caltech-101 [10], and Graz [14]. We perform all processing in grayscale, even when color images are available. All experiments are repeated ten times with different randomly selected training and test images, and the average of per-class recognition rates 2 is recorded for each run. The final result is reported as 2 The alternative performance measure, the percentage of all test images classified correctly, can be biased if test set sizes for different classes vary significantly. This is especially true of the Caltech-101 dataset, where some of the easiest classes are disproportionately large.




 Strong features")

 53.6 ±0.3 56.")
 61.7 ±0.6 64.")
 63.3 ±0.8 66.8 ±0.")

.")


")





![by Li and Perona [11] (eight of](/docs-images/87/96312214/images/4-19.jpg "these were originally collected by")















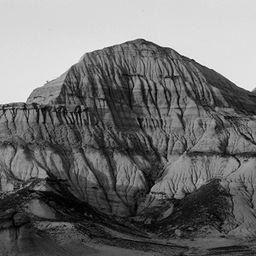








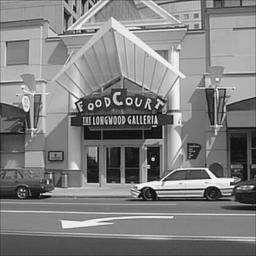
4 office kitchen bedroom store industrial tall building street highway coast open country forest suburb Figure 2. Example images from the scene category database. The starred categories originate from Oliva and Torralba [13]. Weak features (M = 16) Strong features (M = 200) Strong features (M = 400) L Single-level Pyramid Single-level Pyramid Single-level Pyramid 0 (1 1) 45.3 ± ± ±0.3 1 (2 2) 53.6 ± ± ± ± ± ±0.5 2 (4 4) 61.7 ± ± ± ± ± ±0.5 3 (8 8) 63.3 ± ± ± ± ± ±0.6 Table 1. Classification results for the scene category database (see text). The highest results for each kind of feature are shown in bold. the mean and standard deviation of the results from the individual runs. Multi-class classification is done with a support vector machine (SVM) trained using the one-versus-all rule: a classifier is learned to separate each class from the rest, and a test image is assigned the label of the classifier with the highest response Scene Category Recognition Our first dataset (Fig. 2) is composed of fifteen scene categories: thirteen were provided by Li and Perona [11] (eight of these were originally collected by Oliva and Torralba [13]), and two (industrial and store) were collected by ourselves. Each category has 200 to 400 images, and average image size is pixels. The major sources of the pictures in the dataset include the COREL collection, personal photographs, and Google image search. As stated in [11], this is probably the most complete scene category dataset used in the literature thus far. Table 1 shows detailed results of classification experiments using 100 images per class for training and the rest for testing (the same setup as [11]). First, let us examine the performance of strong features for L = 0 and M = 200, corresponding to a standard bag of features. Our classification rate is 72.2% (74.7% for the 13 classes inherited from Li and Perona), which is much higher than their best results of 65.2%, achieved with an orderless method and a feature set comparable to ours. We conjecture that Li and Perona s approach is disadvantaged by its reliance on latent Dirichlet allocation (LDA) [2], which is essentially an unsupervised dimensionality reduction technique and as such, is not necessarily conducive to achieving the highest classification accuracy. To verify this, we have experimented with probabilistic latent semantic analysis (plsa) [7], which attempts to explain the distribution of features in the image as a mixture of a few scene topics or aspects and performs very similarly to LDA in practice [17]. Following the scheme of Quelhas et al. [15], we run plsa in an unsupervised setting to learn a 60-aspect model of half the training images. Next, we apply this model to the other half to obtain probabilities of topics given each image (thus reducing the dimensionality of the feature space from 200 to 60). Finally, we train the SVM on these reduced features and use them to classify the test set. In this setup, our average classification rate drops to 63.3% from the original 72.2%. For the 13
5 office kitchen bedroom store industrial tall building street highway coast open country forest suburb office 92.7 kitchen bedroom 68.3 store 76.2 industrial 65.4 tall building Figure 3. Confusion table for the scene category dataset. Average classification rates for individual classes are listed along the diagonal. The entry in the ith row and jth column is the percentage of images from class i that were misidentified as class j. classes inherited from Li and Perona, it drops to 65.9% from 74.7%, which is now very similar to their results. Thus, we can see that latent factor analysis techniques can adversely affect classification performance, which is also consistent with the results of Quelhas et al. [15]. Next, let us examine the behavior of spatial pyramid matching. For completeness, Table 1 lists the performance achieved using just the highest level of the pyramid (the single-level columns), as well as the performance of the complete matching scheme using multiple levels (the pyramid columns). For all three kinds of features, results improve dramatically as we go from L =0to a multi-level setup. Though matching at the highest pyramid level seems to account for most of the improvement, using all the levels together confers a statistically significant benefit. For strong features, single-level performance actually drops as we go from L =2to L =3. This means that the highest level of the L =3pyramid is too finely subdivided, with individual bins yielding too few matches. Despite the diminished discriminative power of the highest level, the performance of the entire L =3pyramid remains essentially identical to that of the L =2pyramid. This, then, is the main advantage of the spatial pyramid representation: because it combines multiple resolutions in a principled fashion, it is robust to failures at individual levels. It is also interesting to compare performance of different feature sets. As expected, weak features do not perform as well as strong features, though in combination with the spatial pyramid, they can also achieve acceptable levels of accuracy (note that because weak features have a much higher density and much smaller spatial extent than strong street 90.2 highway 86.6 coast 82.4 open country forest 94.7 suburb 99.4 features, their performance continues to improve as we go from L =2to L =3). Increasing the visual vocabulary size from M = 200 to M = 400 results in a small performance increase at L =0, but this difference is all but eliminated at higher pyramid levels. Thus, we can conclude that the coarse-grained geometric cues provided by the pyramid have more discriminative power than an enlarged visual vocabulary. Of course, the optimal way to exploit structure both in the image and in the feature space may be to combine them in a unified multiresolution framework; this is subject for future research. Fig. 3 shows a confusion table between the fifteen scene categories. Not surprisingly, confusion occurs between the indoor classes (kitchen, bedroom, ), and also between some natural classes, such as coast and open country. Fig. 4 shows examples of image retrieval using the spatial pyramid kernel and strong features with M = 200. These examples give a qualitative sense of the kind of visual information captured by our approach. In particular, spatial pyramids seem successful at capturing the organization of major pictorial elements or blobs, the directionality of dominant edges, and the perspective (amount of foreshortening, location of vanishing points). Because the spatial pyramid is based on features computed at the original image resolution, even high-frequency details can be preserved. For example, query image (b) shows white kitchen cabinet doors with dark borders. Three of the retrieved kitchen images contain cabinets of a similar design, the office image shows a wall plastered with white documents in dark frames, and the image shows a white building with darker window frames Caltech-101 Our second set of experiments is on the Caltech-101 database [10] (Fig. 5). This database contains from 31 to 800 images per category. Most images are medium resolution, i.e., about pixels. Caltech-101 is probably the most diverse object database available today, though it is not without shortcomings. Namely, most images feature relatively little clutter, and the objects are centered and occupy most of the image. In addition, a number of categories, such as minaret (see Fig. 5), are affected by corner artifacts resulting from artificial image rotation. Though these artifacts are semantically irrelevant, they can provide stable cues resulting in misleadingly high recognition rates. We follow the experimental setup of Grauman and Darrell [5] and Zhang et al. [23], namely, we train on 30 images per class and test on the rest. For efficiency, we limit the number of test images to 50 per class. Note that, because some categories are very small, we may end up with just a single test image per class. Table 2 gives a breakdown of classification rates for different pyramid levels for weak features and strong features with M = 200. The results for

 (c)")























































































6 (a) kitchen office (b) kitchen office (c) store (d) tall bldg (e) tall bldg (f) forest tall bldg (g) street (h) coast open country Figure 4. Retrieval from the scene category database. The query images are on the left, and the eight images giving the highest values of the spatial pyramid kernel (for L = 2, M = 200) are on the right. The actual class of incorrectly retrieved images is listed below them. minaret (97.6%) cougar body (27.6%) windsor chair (94.6%) joshua tree (87.9%) beaver (27.5%) crocodile (25.0%) okapi (87.8%) ant (25.0%) Figure 5. Caltech-101 results. Top: some classes on which our method (L = 2, M = 200) achieved high performance. Bottom: some classes on which our method performed poorly. M = 400 are not shown, because just as for the scene category database, they do not bring any significant improvement. For L = 0, strong features give 41.2%, which is slightly below the 43% reported by Grauman and Darrell. Our best result is 64.6%, achieved with strong features at L = 2. This exceeds the highest classification rate known to us so far, that of 53.9% reported by Zhang et al. [23]3 Berg et al. [1] report 48% accuracy using 15 training images per class. Our average recognition rate with this setup is 56.4%. The behavior of weak features on this database is 3 Zhang et al. list the percentage of all test images classified correctly, which is probably higher than their per-class average, as discussed earlier.
7 Weak features Strong features (200) L Single-level Pyramid Single-level Pyramid ± ± ± ± ± ± ± ± ± ± ± ± ± ±0.7 Table 2. Classification results for the Caltech-101 database. class 1 mis- class 2 misclass 1 / class 2 classified as classified as class 2 class 1 ketch / schooner lotus / water lily crocodile / crocodile head crayfish / lobster flamingo / ibis Table 3. Top five confusions for our method (L =2,M = 200) on the Caltech-101 database. Class L =0 L =2 Opelt [14] Zhang [23] Bikes 82.4 ± ± People 79.5 ± ± Table 4. Results of our method (M = 200) for the Graz database and comparison with two existing methods. also noteworthy: for L =0, they give a classification rate of 15.5%, which is consistent with a naive graylevel correlation baseline [1], but in conjunction with a four-level spatial pyramid, their performance rises to 54% on par with the best results in the literature. Fig. 5 shows a few of the easiest and hardest object classes for our method. The successful classes are either dominated by rotation artifacts (like minaret), have very little clutter (like windsor chair), or represent coherent natural scenes (like joshua tree and okapi). The least successful classes are either textureless animals (like beaver and cougar), animals that camouflage well in their environment (like crocodile), or thin objects (like ant). Table 3 further illuminates the performance of our method by showing the top five of its confusions, all of which are between closely related classes. To summarize, our method has outperformed both stateof-the-art orderless methods [5, 23] and methods based on precise geometric correspondence [1]. Significantly, all these methods rely on sparse features (interest points or sparsely sampled edge points). However, because of the geometric stability and lack of clutter of Caltech-101, dense features combined with global spatial relations seem to capture more discriminative information about the objects The Graz Dataset As seen from Sections 5.1 and 5.2, our proposed approach does very well on global scene classification tasks, or on object recognition tasks in the absence of clutter with most of the objects assuming canonical poses. However, it was not designed to cope with heavy clutter and pose changes. It is interesting to see how well our algorithm can do by exploiting the global scene cues that still remain under these conditions. Accordingly, our final set of experiments is on the Graz dataset [14] (Fig. 6), which is characterized by high intra-class variation. This dataset has two object classes, bikes (373 images) and persons (460 images), and a background class (270 images). The image resolution is , and the range of scales and poses at which exemplars are presented is very diverse, e.g., a person image may show a pedestrian in the distance, a side view of a complete body, or just a closeup of a head. For this database, we perform two-class detection (object vs. background) using an experimental setup consistent with that of Opelt et al. [14]. Namely, we train detectors for persons and bikes on 100 positive and 100 negative images (of which 50 are drawn from the other object class and 50 from the background), and test on a similarly distributed set. We generate ROC curves by thresholding raw SVM output, and report the ROC equal error rate averaged over ten runs. Table 4 summarizes our results for strong features with M = 200. Note that the standard deviation is quite high because the images in the database vary greatly in their level of difficulty, so the performance for any single run is dependent on the composition of the training set (in particular, for L =2, the performance for bikes ranges from 81% to 91%). For this database, the improvement from L =0to L =2is relatively small. This makes intuitive sense: when a class is characterized by high geometric variability, it is difficult to find useful global features. Despite this disadvantage of our method, we still achieve results very close to those of Opelt et al. [14]. This is somewhat surprising, considering that their method uses a sparse, locally invariant feature representation, which is expected (at least in principle) to make it more robust to clutter and deformations. 6. Discussion This paper has presented a holistic approach for image categorization based on a modification of pyramid match kernels [5]. Our method, which works by repeatedly subdividing an image and computing histograms of image features over the resulting subregions, has shown promising results on three large-scale, diverse datasets. In all our experiments, we follow a sound methodology: namely, we run several baseline tests on every database (one baseline is obtained by omitting subdivision, resulting in a standard bag of features, and another one by using weak features instead of strong ones), report standard deviations of recognition rates, and whenever possible, and compare our results to those in existing literature using a similar setup. Despite the simplicity of our method, and despite the fact that it works not by constructing explicit object models, but by using


![evaluating biases present in newly collected datasets. References [1] A. Berg, T. Berg, and J. Malik. Shape matching and object recognition using low distortion correspondences. In Proc.](/docs-images/87/96312214/images/8-2.jpg "CVPR, volume 1, pages 26 33, 2005. 1, 6, 7 [2] D. Blei, A. Ng, and M. Jordan. Latent dirichlet allocation. Journal of Machine Learning Research, 3:993 1022, 2003. 4 [3] R. Fergus, P. Perona, and A.")
![Zisserman. Object class recognition by unsupervised scale-invariant learning. In Proc. CVPR, volume 2, pages 264 271, 2003. 1 [4] M. Gorkani and R. Picard.](/docs-images/87/96312214/images/8-3.jpg "Texture orientation for sorting photos at a glance. In IAPR International Conference on Pattern Recognition, volume 1, pages 459 464, 1994. 2 [5] K. Grauman and T. Darrell.")
![Pyramid match kernels: Discriminative classification with sets of image features. In Proc. ICCV, 2005. 1, 2, 3, 5, 7 [6] E. Hadjidemetriou, M. Grossberg, and S. Nayar.](/docs-images/87/96312214/images/8-4.jpg "Multiresolution histograms and their use in recognition. IEEE Trans. PAMI, 26(7):831 847, 2004. 2 [7] T. Hofmann. Unsupervised learning by probabilistic latent semantic analysis.")
![Machine Learning, 42(1):177 196, 2001. 4 [8] J. Koenderink and A. V. Doorn. The structure of locally orderless images. IJCV, 31(2/3):159 168, 1999. 2 [9] S. Lazebnik, C. Schmid, and J. Ponce.](/docs-images/87/96312214/images/8-5.jpg "A maximum entropy framework for part-based texture and object recognition. In Proc. ICCV, 2005. 1 [10] F.-F. Li, R. Fergus, and P. Perona.")

![Lowe. Towards a computational model for object recognition in IT cortex. In Biologically Motivated Computer Vision, pages 20 31, 2000. 2, 3 [13] A. Oliva and A. Torralba.](/docs-images/87/96312214/images/8-7.jpg "Modeling the shape of the scene: a holistic representation of the spatial envelope. IJCV, 42(3):145 175, 2001. 1, 4 [14] A. Opelt, M. Fussenegger, A. Pinz, and P. Auer.")
![Weak hypotheses and boosting for generic object detection and recognition. In Proc. ECCV, volume 2, pages 71 84, 2004. http://www.emt.tugraz.at/ pinz/data. 3, 7 [15] P. Quelhas, F. Monay, J.-M.](/docs-images/87/96312214/images/8-8.jpg "Odobez, D. Gatica, T. Tuytelaars, and L. V. Gool. Modeling scenes with local descriptors and latent aspects. In Proc. ICCV, 2005. 4, 5 [16] B. Schiele and J. Crowley.")
8 bike person background Figure 6. The Graz database. global cues as indirect evidence about the presence of an object, it consistently achieves an improvement over an orderless image representation. This is not a trivial accomplishment, given that a well-designed bag-of-features method can outperform more sophisticated approaches based on parts and geometric relations [23]. Our results also underscore the surprising and ubiquitous power of global scene statistics: even in highly variable datasets, such as Graz, they can still provide useful discriminative information. It is important to develop methods that take full advantage of this information either as stand-alone scene categorizers, as context modules within larger object recognition systems, or as tools for evaluating biases present in newly collected datasets. References [1] A. Berg, T. Berg, and J. Malik. Shape matching and object recognition using low distortion correspondences. In Proc. CVPR, volume 1, pages 26 33, , 6, 7 [2] D. Blei, A. Ng, and M. Jordan. Latent dirichlet allocation. Journal of Machine Learning Research, 3: , [3] R. Fergus, P. Perona, and A. Zisserman. Object class recognition by unsupervised scale-invariant learning. In Proc. CVPR, volume 2, pages , [4] M. Gorkani and R. Picard. Texture orientation for sorting photos at a glance. In IAPR International Conference on Pattern Recognition, volume 1, pages , [5] K. Grauman and T. Darrell. Pyramid match kernels: Discriminative classification with sets of image features. In Proc. ICCV, , 2, 3, 5, 7 [6] E. Hadjidemetriou, M. Grossberg, and S. Nayar. Multiresolution histograms and their use in recognition. IEEE Trans. PAMI, 26(7): , [7] T. Hofmann. Unsupervised learning by probabilistic latent semantic analysis. Machine Learning, 42(1): , [8] J. Koenderink and A. V. Doorn. The structure of locally orderless images. IJCV, 31(2/3): , [9] S. Lazebnik, C. Schmid, and J. Ponce. A maximum entropy framework for part-based texture and object recognition. In Proc. ICCV, [10] F.-F. Li, R. Fergus, and P. Perona. Learning generative visual models from few training examples: an incremental Bayesian approach tested on 101 object categories. In IEEE CVPR Workshop on Generative-Model Based Vision, Datasets/Caltech101. 1, 3, 5 [11] F.-F. Li and P. Perona. A Bayesian hierarchical model for learning natural scene categories. In Proc. CVPR, , 4 [12] D. Lowe. Towards a computational model for object recognition in IT cortex. In Biologically Motivated Computer Vision, pages 20 31, , 3 [13] A. Oliva and A. Torralba. Modeling the shape of the scene: a holistic representation of the spatial envelope. IJCV, 42(3): , , 4 [14] A. Opelt, M. Fussenegger, A. Pinz, and P. Auer. Weak hypotheses and boosting for generic object detection and recognition. In Proc. ECCV, volume 2, pages 71 84, pinz/data. 3, 7 [15] P. Quelhas, F. Monay, J.-M. Odobez, D. Gatica, T. Tuytelaars, and L. V. Gool. Modeling scenes with local descriptors and latent aspects. In Proc. ICCV, , 5 [16] B. Schiele and J. Crowley. Recognition without correspondence using multidimensional receptive field histograms. IJCV, 36(1):31 50, [17] J. Sivic, B. Russell, A. Efros, A. Zisserman, and W. Freeman. Discovering objects and their location in images. In Proc. ICCV, , 4 [18] M. Swain and D. Ballard. Color indexing. IJCV, 7(1):11 32, [19] M. Szummer and R. Picard. Indoor-outdoor image classification. In IEEE International Workshop on Content-Based Access of Image and Video Databases, pages 42 51, [20] A. Torralba, K. P. Murphy, W. T. Freeman, and M. A. Rubin. Context-based vision system for place and object recognition. In Proc. ICCV, , 2, 3 [21] C. Wallraven, B. Caputo, and A. Graf. Recognition with local features: the kernel recipe. In Proc. ICCV, volume 1, pages , [22] J. Willamowski, D. Arregui, G. Csurka, C. R. Dance, and L. Fan. Categorizing nine visual classes using local appearance descriptors. In ICPR Workshop on Learning for Adaptable Visual Systems, [23] J. Zhang, M. Marszalek, S. Lazebnik, and C. Schmid. Local features and kernels for classifcation of texture and object categories: An in-depth study. Technical Report RR-5737, INRIA Rhne-Alpes, , 5, 6, 7, 8
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Beyond bags of features: spatial pyramid matching for recognizing natural scene categories
 Beyond bags of features: spatial pyramid matching for recognizing natural scene categories Svetlana Lazebnik, Cordelia Schmid, Jean Ponce To cite this version: Svetlana Lazebnik, Cordelia Schmid, Jean
Beyond bags of features: spatial pyramid matching for recognizing natural scene categories Svetlana Lazebnik, Cordelia Schmid, Jean Ponce To cite this version: Svetlana Lazebnik, Cordelia Schmid, Jean
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Beyond bags of Features
 Beyond bags of Features Spatial Pyramid Matching for Recognizing Natural Scene Categories Camille Schreck, Romain Vavassori Ensimag December 14, 2012 Schreck, Vavassori (Ensimag) Beyond bags of Features
Beyond bags of Features Spatial Pyramid Matching for Recognizing Natural Scene Categories Camille Schreck, Romain Vavassori Ensimag December 14, 2012 Schreck, Vavassori (Ensimag) Beyond bags of Features
arxiv: v3 [cs.cv] 3 Oct 2012
![arxiv: v3 [cs.cv] 3 Oct 2012](/thumbs/96/128756091.jpg "arxiv: v3 [cs.cv] 3 Oct 2012") Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Comparing Local Feature Descriptors in plsa-based Image Models
 Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Improved Spatial Pyramid Matching for Image Classification
 Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Improved Spatial Pyramid Matching for Image Classification Mohammad Shahiduzzaman, Dengsheng Zhang, and Guojun Lu Gippsland School of IT, Monash University, Australia {Shahid.Zaman,Dengsheng.Zhang,Guojun.Lu}@monash.edu
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING. Wei Liu, Serkan Kiranyaz and Moncef Gabbouj
 Proceedings of the 5th International Symposium on Communications, Control and Signal Processing, ISCCSP 2012, Rome, Italy, 2-4 May 2012 ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING
Proceedings of the 5th International Symposium on Communications, Control and Signal Processing, ISCCSP 2012, Rome, Italy, 2-4 May 2012 ROBUST SCENE CLASSIFICATION BY GIST WITH ANGULAR RADIAL PARTITIONING
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Part based models for recognition. Kristen Grauman
 Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
Part based models for recognition Kristen Grauman UT Austin Limitations of window-based models Not all objects are box-shaped Assuming specific 2d view of object Local components themselves do not necessarily
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition
 Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Mining Discriminative Adjectives and Prepositions for Natural Scene Recognition Bangpeng Yao 1, Juan Carlos Niebles 2,3, Li Fei-Fei 1 1 Department of Computer Science, Princeton University, NJ 08540, USA
Object Detection Using Segmented Images
 Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Object Detection Using Segmented Images Naran Bayanbat Stanford University Palo Alto, CA naranb@stanford.edu Jason Chen Stanford University Palo Alto, CA jasonch@stanford.edu Abstract Object detection
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Visual words. Map high-dimensional descriptors to tokens/words by quantizing the feature space.
 Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Visual words Map high-dimensional descriptors to tokens/words by quantizing the feature space. Quantize via clustering; cluster centers are the visual words Word #2 Descriptor feature space Assign word
Semantic-based image analysis with the goal of assisting artistic creation
 Semantic-based image analysis with the goal of assisting artistic creation Pilar Rosado 1, Ferran Reverter 2, Eva Figueras 1, and Miquel Planas 1 1 Fine Arts Faculty, University of Barcelona, Spain, pilarrosado@ub.edu,
Semantic-based image analysis with the goal of assisting artistic creation Pilar Rosado 1, Ferran Reverter 2, Eva Figueras 1, and Miquel Planas 1 1 Fine Arts Faculty, University of Barcelona, Spain, pilarrosado@ub.edu,
Deformable Part Models
 CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
CS 1674: Intro to Computer Vision Deformable Part Models Prof. Adriana Kovashka University of Pittsburgh November 9, 2016 Today: Object category detection Window-based approaches: Last time: Viola-Jones
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Spatial Hierarchy of Textons Distributions for Scene Classification
 Spatial Hierarchy of Textons Distributions for Scene Classification S. Battiato 1, G. M. Farinella 1, G. Gallo 1, and D. Ravì 1 Image Processing Laboratory, University of Catania, IT {battiato, gfarinella,
Spatial Hierarchy of Textons Distributions for Scene Classification S. Battiato 1, G. M. Farinella 1, G. Gallo 1, and D. Ravì 1 Image Processing Laboratory, University of Catania, IT {battiato, gfarinella,
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Scene Recognition using Bag-of-Words
 Scene Recognition using Bag-of-Words Sarthak Ahuja B.Tech Computer Science Indraprastha Institute of Information Technology Okhla, Delhi 110020 Email: sarthak12088@iiitd.ac.in Anchita Goel B.Tech Computer
Scene Recognition using Bag-of-Words Sarthak Ahuja B.Tech Computer Science Indraprastha Institute of Information Technology Okhla, Delhi 110020 Email: sarthak12088@iiitd.ac.in Anchita Goel B.Tech Computer
CLASSIFICATION Experiments
 CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
CLASSIFICATION Experiments January 27,2015 CS3710: Visual Recognition Bhavin Modi Bag of features Object Bag of words 1. Extract features 2. Learn visual vocabulary Bag of features: outline 3. Quantize
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
CPPP/UFMS at ImageCLEF 2014: Robot Vision Task
 CPPP/UFMS at ImageCLEF 2014: Robot Vision Task Rodrigo de Carvalho Gomes, Lucas Correia Ribas, Amaury Antônio de Castro Junior, Wesley Nunes Gonçalves Federal University of Mato Grosso do Sul - Ponta Porã
CPPP/UFMS at ImageCLEF 2014: Robot Vision Task Rodrigo de Carvalho Gomes, Lucas Correia Ribas, Amaury Antônio de Castro Junior, Wesley Nunes Gonçalves Federal University of Mato Grosso do Sul - Ponta Porã
Unsupervised Identification of Multiple Objects of Interest from Multiple Images: discover
 Unsupervised Identification of Multiple Objects of Interest from Multiple Images: discover Devi Parikh and Tsuhan Chen Carnegie Mellon University {dparikh,tsuhan}@cmu.edu Abstract. Given a collection of
Unsupervised Identification of Multiple Objects of Interest from Multiple Images: discover Devi Parikh and Tsuhan Chen Carnegie Mellon University {dparikh,tsuhan}@cmu.edu Abstract. Given a collection of
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Recognition with Bag-ofWords. (Borrowing heavily from Tutorial Slides by Li Fei-fei)
") Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Recognition with Bag-ofWords (Borrowing heavily from Tutorial Slides by Li Fei-fei) Recognition So far, we ve worked on recognizing edges Now, we ll work on recognizing objects We will use a bag-of-words
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study
 Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Loose Shape Model for Discriminative Learning of Object Categories
 Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Loose Shape Model for Discriminative Learning of Object Categories Margarita Osadchy and Elran Morash Computer Science Department University of Haifa Mount Carmel, Haifa 31905, Israel rita@cs.haifa.ac.il
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Scene Classification with Low-dimensional Semantic Spaces and Weak Supervision
 Scene Classification with Low-dimensional Semantic Spaces and Weak Supervision Nikhil Rasiwasia Nuno Vasconcelos Department of Electrical and Computer Engineering University of California, San Diego nikux@ucsd.edu,
Scene Classification with Low-dimensional Semantic Spaces and Weak Supervision Nikhil Rasiwasia Nuno Vasconcelos Department of Electrical and Computer Engineering University of California, San Diego nikux@ucsd.edu,
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features
 Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Preliminary Local Feature Selection by Support Vector Machine for Bag of Features Tetsu Matsukawa Koji Suzuki Takio Kurita :University of Tsukuba :National Institute of Advanced Industrial Science and
Using Geometric Blur for Point Correspondence
 1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
CS 231A Computer Vision (Fall 2011) Problem Set 4
 Problem Set 4") CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
CS 231A Computer Vision (Fall 2011) Problem Set 4 Due: Nov. 30 th, 2011 (9:30am) 1 Part-based models for Object Recognition (50 points) One approach to object recognition is to use a deformable part-based
Object Category Detection. Slides mostly from Derek Hoiem
 Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Category Detection Slides mostly from Derek Hoiem Today s class: Object Category Detection Overview of object category detection Statistical template matching with sliding window Part-based Models
Object Classification for Video Surveillance
 Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Object Classification for Video Surveillance Rogerio Feris IBM TJ Watson Research Center rsferis@us.ibm.com http://rogerioferis.com 1 Outline Part I: Object Classification in Far-field Video Part II: Large
Kernel Codebooks for Scene Categorization
 Kernel Codebooks for Scene Categorization Jan C. van Gemert, Jan-Mark Geusebroek, Cor J. Veenman, and Arnold W.M. Smeulders Intelligent Systems Lab Amsterdam (ISLA), University of Amsterdam, Kruislaan
Kernel Codebooks for Scene Categorization Jan C. van Gemert, Jan-Mark Geusebroek, Cor J. Veenman, and Arnold W.M. Smeulders Intelligent Systems Lab Amsterdam (ISLA), University of Amsterdam, Kruislaan
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
 5*4%),-
5*4%),- Visual localization using global visual features and vanishing points
 Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Visual localization using global visual features and vanishing points Olivier Saurer, Friedrich Fraundorfer, and Marc Pollefeys Computer Vision and Geometry Group, ETH Zürich, Switzerland {saurero,fraundorfer,marc.pollefeys}@inf.ethz.ch
Discriminative classifiers for image recognition
 Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Discriminative classifiers for image recognition May 26 th, 2015 Yong Jae Lee UC Davis Outline Last time: window-based generic object detection basic pipeline face detection with boosting as case study
Spatial Latent Dirichlet Allocation
 Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Spatial Latent Dirichlet Allocation Xiaogang Wang and Eric Grimson Computer Science and Computer Science and Artificial Intelligence Lab Massachusetts Tnstitute of Technology, Cambridge, MA, 02139, USA
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Modeling Scenes with Local Descriptors and Latent Aspects
 Modeling Scenes with Local Descriptors and Latent Aspects P. Quelhas, F. Monay, J.-M. Odobez, D. Gatica-Perez, T. Tuytelaars, and L. Van Gool IDIAP Research Institute, Martigny, Switzerland Katholieke
Modeling Scenes with Local Descriptors and Latent Aspects P. Quelhas, F. Monay, J.-M. Odobez, D. Gatica-Perez, T. Tuytelaars, and L. Van Gool IDIAP Research Institute, Martigny, Switzerland Katholieke
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Patch-Based Image Classification Using Image Epitomes
 Patch-Based Image Classification Using Image Epitomes David Andrzejewski CS 766 - Final Project December 19, 2005 Abstract Automatic image classification has many practical applications, including photo
Patch-Based Image Classification Using Image Epitomes David Andrzejewski CS 766 - Final Project December 19, 2005 Abstract Automatic image classification has many practical applications, including photo
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Learning Representations for Visual Object Class Recognition
 Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Learning Representations for Visual Object Class Recognition Marcin Marszałek Cordelia Schmid Hedi Harzallah Joost van de Weijer LEAR, INRIA Grenoble, Rhône-Alpes, France October 15th, 2007 Bag-of-Features
Effective Classifiers for Detecting Objects
 Effective Classifiers for Detecting Objects Michael Mayo Dept. of Computer Science University of Waikato Private Bag 3105, Hamilton, New Zealand mmayo@cs.waikato.ac.nz Abstract Several state-of-the-art
Effective Classifiers for Detecting Objects Michael Mayo Dept. of Computer Science University of Waikato Private Bag 3105, Hamilton, New Zealand mmayo@cs.waikato.ac.nz Abstract Several state-of-the-art
Multiple Kernel Learning for Emotion Recognition in the Wild
 Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
Multiple Kernel Learning for Emotion Recognition in the Wild Karan Sikka, Karmen Dykstra, Suchitra Sathyanarayana, Gwen Littlewort and Marian S. Bartlett Machine Perception Laboratory UCSD EmotiW Challenge,
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
A Keypoint Descriptor Inspired by Retinal Computation
 A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
A Keypoint Descriptor Inspired by Retinal Computation Bongsoo Suh, Sungjoon Choi, Han Lee Stanford University {bssuh,sungjoonchoi,hanlee}@stanford.edu Abstract. The main goal of our project is to implement
TA Section: Problem Set 4
 TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
TA Section: Problem Set 4 Outline Discriminative vs. Generative Classifiers Image representation and recognition models Bag of Words Model Part-based Model Constellation Model Pictorial Structures Model
Discriminative Object Class Models of Appearance and Shape by Correlatons
 Discriminative Object Class Models of Appearance and Shape by Correlatons S. Savarese, J. Winn, A. Criminisi University of Illinois at Urbana-Champaign Microsoft Research Ltd., Cambridge, CB3 0FB, United
Discriminative Object Class Models of Appearance and Shape by Correlatons S. Savarese, J. Winn, A. Criminisi University of Illinois at Urbana-Champaign Microsoft Research Ltd., Cambridge, CB3 0FB, United
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Continuous Visual Vocabulary Models for plsa-based Scene Recognition
 Continuous Visual Vocabulary Models for plsa-based Scene Recognition Eva Hörster Multimedia Computing Lab University of Augsburg Augsburg, Germany hoerster@informatik.uniaugsburg.de Rainer Lienhart Multimedia
Continuous Visual Vocabulary Models for plsa-based Scene Recognition Eva Hörster Multimedia Computing Lab University of Augsburg Augsburg, Germany hoerster@informatik.uniaugsburg.de Rainer Lienhart Multimedia
Oriented Filters for Object Recognition: an empirical study
 Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Oriented Filters for Object Recognition: an empirical study Jerry Jun Yokono Tomaso Poggio Center for Biological and Computational Learning, M.I.T. E5-0, 45 Carleton St., Cambridge, MA 04, USA Sony Corporation,
Learning and Recognizing Visual Object Categories Without First Detecting Features
 Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Learning and Recognizing Visual Object Categories Without First Detecting Features Daniel Huttenlocher 2007 Joint work with D. Crandall and P. Felzenszwalb Object Category Recognition Generic classes rather
Unsupervised Learning of Categories from Sets of Partially Matching Image Features
 Unsupervised Learning of Categories from Sets of Partially Matching Image Features Kristen Grauman and Trevor Darrell Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of
Unsupervised Learning of Categories from Sets of Partially Matching Image Features Kristen Grauman and Trevor Darrell Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of
Analysis: TextonBoost and Semantic Texton Forests. Daniel Munoz Februrary 9, 2009
 Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
Analysis: TextonBoost and Semantic Texton Forests Daniel Munoz 16-721 Februrary 9, 2009 Papers [shotton-eccv-06] J. Shotton, J. Winn, C. Rother, A. Criminisi, TextonBoost: Joint Appearance, Shape and Context
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Random projection for non-gaussian mixture models
 Random projection for non-gaussian mixture models Győző Gidófalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract Recently,
Random projection for non-gaussian mixture models Győző Gidófalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract Recently,
Determinant of homography-matrix-based multiple-object recognition
 Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Determinant of homography-matrix-based multiple-object recognition 1 Nagachetan Bangalore, Madhu Kiran, Anil Suryaprakash Visio Ingenii Limited F2-F3 Maxet House Liverpool Road Luton, LU1 1RS United Kingdom
Local Features based Object Categories and Object Instances Recognition
 Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Local Features based Object Categories and Object Instances Recognition Eric Nowak Ph.D. thesis defense 17th of March, 2008 1 Thesis in Computer Vision Computer vision is the science and technology of
Recognizing hand-drawn images using shape context
 Recognizing hand-drawn images using shape context Gyozo Gidofalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract The objective
Recognizing hand-drawn images using shape context Gyozo Gidofalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract The objective
Exploring Bag of Words Architectures in the Facial Expression Domain
 Exploring Bag of Words Architectures in the Facial Expression Domain Karan Sikka, Tingfan Wu, Josh Susskind, and Marian Bartlett Machine Perception Laboratory, University of California San Diego {ksikka,ting,josh,marni}@mplab.ucsd.edu
Exploring Bag of Words Architectures in the Facial Expression Domain Karan Sikka, Tingfan Wu, Josh Susskind, and Marian Bartlett Machine Perception Laboratory, University of California San Diego {ksikka,ting,josh,marni}@mplab.ucsd.edu
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
A Survey on Image Classification using Data Mining Techniques Vyoma Patel 1 G. J. Sahani 2
 IJSRD - International Journal for Scientific Research & Development Vol. 2, Issue 10, 2014 ISSN (online): 2321-0613 A Survey on Image Classification using Data Mining Techniques Vyoma Patel 1 G. J. Sahani
IJSRD - International Journal for Scientific Research & Development Vol. 2, Issue 10, 2014 ISSN (online): 2321-0613 A Survey on Image Classification using Data Mining Techniques Vyoma Patel 1 G. J. Sahani
Detecting Object Instances Without Discriminative Features
 Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Detecting Object Instances Without Discriminative Features Edward Hsiao June 19, 2013 Thesis Committee: Martial Hebert, Chair Alexei Efros Takeo Kanade Andrew Zisserman, University of Oxford 1 Object Instance
Codebook Graph Coding of Descriptors
 Int'l Conf. Par. and Dist. Proc. Tech. and Appl. PDPTA'5 3 Codebook Graph Coding of Descriptors Tetsuya Yoshida and Yuu Yamada Graduate School of Humanities and Science, Nara Women s University, Nara,
Int'l Conf. Par. and Dist. Proc. Tech. and Appl. PDPTA'5 3 Codebook Graph Coding of Descriptors Tetsuya Yoshida and Yuu Yamada Graduate School of Humanities and Science, Nara Women s University, Nara,
Ensemble of Bayesian Filters for Loop Closure Detection
 Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
Ensemble of Bayesian Filters for Loop Closure Detection Mohammad Omar Salameh, Azizi Abdullah, Shahnorbanun Sahran Pattern Recognition Research Group Center for Artificial Intelligence Faculty of Information
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Distances and Kernels. Motivation
 Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
Distances and Kernels Amirshahed Mehrtash Motivation How similar? 1 Problem Definition Designing a fast system to measure the similarity il it of two images. Used to categorize images based on appearance.
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction
 Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking
Hand Posture Recognition Using Adaboost with SIFT for Human Robot Interaction Chieh-Chih Wang and Ko-Chih Wang Department of Computer Science and Information Engineering Graduate Institute of Networking