Tour Into the Picture using a Vanishing Line and its Extension to Panoramic Images
|
|
|
- Dwain Summers
- 5 years ago
- Views:
Transcription
1 EUROGRAPHICS 2001 / A. Chalmers and T.-M. Rhyne (Guest Editors) Volume 20 (2001), Number 3 Tour Into the Picture using a Vanishing Line and its Extension to Panoramic Images Hyung Woo Kang, Soon Hyoung Pyo, Ken-ichi Anjyo, and Sung Yong Shin Department of Computer Science, Korea Advanced Institute of Science and Technology Electronics and Telecommunications Research Institute OLM Digital, Inc. {henry, syshin}@jupiter.kaist.ac.kr, shpyo@etri.re.kr, anjyo@acm.org Abstract Tour into the picture (TIP) proposed by Horry et al. 13 is a method for generating a sequence of walk-through images from a single reference picture (or image). By navigating a 3D scene model constructed from the picture, TIP produces convincing 3D effects. Assuming that the picture has one, they proposed the scene modeling scheme called spidery mesh. However, this scheme has to go through major modification when the picture contains multiple s or does not have any well-defined. Moreover, the spidery mesh is hard to generalize for other types of images such as panoramic images. In this paper, we propose a new scheme for TIP which is based on a single vanishing line instead of a. Based on projective geometry, our scheme is simple and yet general enough to address the problems faced with the previous method. We also show that our scheme can be naturally extended to a panoramic image. Keywords: Image-based modeling/rendering, projective geometry, vanishing line, panoramic image. 1. Introduction 1.1. Motivation Real-time generation of photorealistic images is a recurring theme in computer graphics. Several rendering techniques, such as ray-tracing or radiosity, have been developed to create images of high quality. However, these techniques may not be applicable to real-time rendering for a scene of complex geometry, since their image generation time depends on the geometric complexity of the scene. Moreover, it takes excessive human effort to model the complex scene itself. Recently, a different approach for real-time realistic image generation, called image-based rendering, has been of much attention. In this approach, an image viewed from an arbitrary viewpoint is synthesized using scene information extracted from a set of reference images. Compared to traditional rendering, this approach has several advantages: It does not require modeling of complex geometry of a scene. It provides real-time scene rendering since the image generation time depends only on the size of the image. Moreover, a high-quality image can be generated when photorealistic images are used as reference images. Tour into the picture (TIP) proposed by Horry et al. 13 is a method that facilitates image-based navigation into a single reference picture (or image). This method constructs a simple 3D scene model from a 2D image and generates realistic walk-through images by navigating the model. They proposed an interactive modeling scheme called spidery mesh based on the location of a in the image. However, since their scheme assumes that the image has one vanishing point, major modification is required when the image contains multiple s or no clearly-identified. Moreover, the spidery mesh is hard to generalize for other types of images such as panoramic images. In this paper, we present a new modeling scheme for TIP based on a single vanishing line rather than a single vanishing point. A vanishing line contains, according to projective geometry 16, all s caused by parallel lines in a plane. The scene model is constructed with respect to the vanishing line interactively specified by the user. The new scheme is simpler than the spidery mesh, and yet general enough to deal with the problems faced with the previous method. Also, we show that our scheme can be naturally extended to navigation into a panoramic image. Published by Blackwell Publishers, 108 Cowley Road, Oxford OX4 1JF, UK and 30 Main Street, Malden, MA 02148, USA.
2 1.2. Related work McMillan et al. explained image-based rendering with the notion of a plenoptic function, which defines the radiant energy at each point in the space through every incident direction 7. In this point of view, reference images are samples of the plenoptic function. An image-based rendering technique reconstructs the plenoptic function by interpolating those samples. An image viewed from an arbitrary viewpoint is generated by resampling the plenoptic function thus obtained. An early approach to image-based rendering is to employ environment maps as samples of the plenoptic function at selected locations 1, 2, 3, 4. To navigate the environment, one has to move the viewpoint discretely from location to location while continuously changing the viewing direction. That is, continuous camera translation is not supported in this approach. To avoid this problem, a warp function is employed to establish the relative movement of each pixel with respect to camera movement, 6, 7, 8. In general, a reliable warp function is hard to obtain automatically for a real environment whose exact geometry is not available. A different approach is to construct a light field from a set of plenoptic samples such as multiple reference images taken at regular grid points 9, 10, 11. This approach requires an efficient way to maintain dense plenoptic samples. Debevec proposed an efficient method for modeling existing architectural scenes from a sparse set of still photographs 12. A basic geometric model of the scene is built with primitives such as boxes, prisms, and surfaces of revolution, and then their dimensions are optimized to match the input photographs. Additional geometric detail of the model is automatically recovered through stereo matching. They used a view-dependent texture mapping method to render a novel view of the scene from the desired location. When the input image is full of man-made structures (e.g. buildings and houses) a rather complex 3D model can be constructed from even a single image. Liebowitz et al. presented algorithms useful for building architectural models from a single image 1. Using various geometric constraints that are common especially in architectural scenes such as parallelism and orthogonality, these algorithms are able to measure plane orientations, point locations, internal camera parameters, etc. Based on measured data, the architectural scene can be recovered from a single image. This approach rather focuses on accurately reconstructing the foreground object from a single image of architectural scene with artificial regularities, and is not intended for image-based navigation for non-sophisticated users Overview Given a single reference image, our goal is to provide a simple, efficient, and general modeling scheme and an interface that gives convincing visual effects of traveling into the scene, rather than to accurately reconstruct the original structure of objects from the image. While the spidery mesh of TIP is usually suited for an image with a single vanishing point, our modeling scheme is directly applicable to a larger set of images which contain clear or unclear vanishing points. Moreover, our modeling scheme is naturally extended to navigation into a panoramic image. The scene model consists of a background model and foreground object models. The background model is constructed based on the location of a vanishing line, and the foreground object models are then placed on the ground plane of the background model, exploiting their relationship to the camera position and the. By interactively specifying the geometric constraints in the scene through simple interface, users can make their imagination real as they find or feel in the 2D image. We propose simple methods to compute all the 3D coordinates for the models, and to generate their corresponding texture maps (called background image and foreground images) from the input image. The idea for planar images nicely carries over to panoramic images by defining vanishing circles that play the same role of vanishing lines. The remainder of this paper is organized as follows. In Section 2, we briefly discuss the method of Horry et al. Section 3 presents how our background model is constructed based on the notion of a vanishing line. Section 4 deals with the foreground models that are to be attached to the background model to form a scene. We discuss how to generate walkthrough images from the constructed scene model in Section. In Section 6, we show how to adapt our scheme to a panoramic image. Section 7 shows the experimental results both for planar and panoramic images. Finally, we conclude this paper in Section Tour into the picture TIP proposed by Horry et al. is a method to create an image viewed from a camera which can be walked-through or flown-through a simple 3D scene model constructed from an input image. The overall flow diagram for this method is illustrated in Fig. 1. To generate an output image viewed from a new viewpoint, we must construct a 3D scene model to be rendered, and obtain the images containing the texture information of the model. input image spidery mesh construction foreground objects segmentation scene model background model background image texture and mask images foreground model foreground mask camera positioning & rendering Figure 1: Flow diagram for the original TIP output image
3 The scene model is composed of a background model together with the foreground object models. To interactively construct the scene model, they proposed a modeling scheme called spidery mesh. In a basic form of spidery mesh, the location of the as well as that of the inner rectangle are interactively specified (Fig. 2a), and the image is decomposed into five polygons based on the specification (Fig. 2b). The background model is then constructed with five rectangles in the 3D space which correspond to these five polygons (Fig. 2c). These rectangles represent the floor, the ceiling, the left wall, the right wall, and the rear wall, respectively. The authors also suggested a simplified version of spidery mesh for an image which has no clearly identified. In this case, the background model is constructed with just the floor and the rear wall. Later, they added another type of the spidery mesh that can be applied to images with two s 14. Those types of spidery mesh have quite different structures specialized for corresponding input images. After the background model is constructed, the foreground objects are also interactively identified in the image. They are modeled as polygons in the 3D space and attached to the background model by computing their 3D coordinates in the scene model. inner rectangle outer rectangle (a) spidery mesh 11 9 left wall ceiling 7 8 right rear wall 1 wall 2 floor (b) deduced 2D polygons (c) 3D structure Figure 2: Spidery mesh and the background model of the original TIP Together with the scene model, the images called background image and foreground mask are generated by segmenting the foreground objects from the input image. The background image is used as a texture which is to be mapped onto the background model. This image is obtained by erasing the region occupied by the foreground objects and painting the region with neighboring colors, using conventional 2D painting tools. For foreground objects, the input image is used as their texture map. However, additional information is needed to distinguish the exact portion of the foreground object from the background portion within the polygonal foreground model. This information is recorded in a gray-scale image called foreground mask, where it is white in the region for the foreground object and black elsewhere. By properly assigning the alpha value of the white colored pixels in the mask, we can control the opacity of the foreground object. Thus, an image viewed from a novel viewpoint is created by choosing the camera position and rendering the constructed scene model. The color of each pixel in the output image is decided by referring to the background image, the input image, and the foreground mask Background model 3.1. Vanishing line A is formed in an image by a set of parallel lines. In Fig. 3, the real objects lie on a plane called object plane (e.g., the horizontal plane on which the viewer stands). A point a in the object plane appears as a point a in the image plane which is an intersection point between the image plane and the line connecting a and the eye point. In the similar way, the line A on the object plane appears in the image plane as an intersection line A between the image plane and the plane π A which contains A and the eye position. object plane horizon plane A B π A π B a A B a image plane l vanishing line Figure 3: and vanishing line As shown in the figure, lines A and B on the object plane are parallel, and appear in the image as A and B, respectively. Since the two planes π A and π B (the one containing A and the eye point and the other containing B and the eye point) are not parallel, A and B intersect at a point in the image plane called a. In fact, the vanishing point is the point at which the intersection line l of π A with π B meets the image plane. Since A and B are parallel on the object plane, l is parallel to A, B and the object plane. Hence, l lies on the plane which contains the eye point and is parallel to the object plane. This plane is called a horizon plane. As the lines A and B in the object plane take on all possible inclinations (relative to the image plane), l also takes on the same inclinations on the horizon plane as those of A and B, describing a line of s in the image plane. This line is called a vanishing line. It is the intersection of the image plane with the horizon plane. For example, the horizon that we can see through the landscape, is a vanishing line formed by all parallel lines on the object plane. We can obtain important information from the location of the vanishing line in an image. Since the horizon plane which contains the vanishing line and the eye point is always parallel to the object plane, the line starting from the eye position and intersecting the image plane below the vanishing line always meets the object plane. On the contrary, the line containing the eye position and a point in the image plane above the vanishing line does not intersect the object plane. Hence, a vanishing line can be used to distinguish the region in the image corresponding to the object plane from that corresponding to the space above it. For example, if a eye
4 horizon appears in the landscape image, the region below the horizon corresponds to the object plane Model construction Our modeling scheme is different from the spidery mesh in that it is based on the vanishing line rather than the vanishing point in the image. With the new scheme, a vanishing line in the input image is interactively specified by a user, and the image is then divided by the vanishing line into two disjoint regions. The region below the vanishing line in the image corresponds to the object plane in the 3D environment, and that above the vanishing line corresponds to the space above the object plane. This space contains no objects that occlude another ones after all the foreground objects are extracted from the input image. Hence this space can be thought of as a plane of infinite distance. Based on this observation, we construct a background model with two planes (called a and a back plane ) corresponding to the two regions in the image separated by the vanishing line (Fig. 4). 1 3 vanishing line 2 4 (a) 2D image back plane 4 (b) 3D polygons Figure 4: new background model 3 6 In Fig., vertices 1 4 are the four corners of the image and vertices and 6 are the intersection points of the vanishing line with the image boundary. To render the background model, the 3D coordinates of the vertices of the model must be computed. For easy computation, we assume that the camera is positioned at the origin, the view direction is towards +z, the view-up vector is towards +y, and the focal length of the camera is d. back plane (at infinity) 1 background model 6 3 image 1 2 (=2 ) (=4 ) z=d z y x O (camera) Figure : Vertex coordinates of the new background model The vertices 1 6 of the image have the following coordinates in the image plane: 1:(x L, y 1, d), 2 :(x L, y 2, d), 3 :(x R, y 3, d) 4:(x R, y 4, d), :(x L, y, d), 6 :(x R, y 6, d) where x L and x R are the x-coordinates of the left and the right border of the image, respectively. Vertices 2 and 4 in the background model coincide with corner vertices 2 and 4, at the bottom of the image respectively. The rest of vertices, 1,3,, and 6 are respectively the ideal points in the directions from the viewpoint to the corresponding vertices, 1, 3,, and 6 in the image. For example, vertex 3 is assigned a homogeneous coordinate (x R, y 3, d,0) since this vertex is an ideal point in the direction from the origin to the vertex 3 in the image. Similarly, the homogeneous coordinates of each vertex in the background model are given. Thus, the coordinates of each vertex in the background model are: 1 :(x L, y 1, d,0), 2 :(x L, y 2, d,1), 3 :(x R, y 3, d,0) 4 :(x R, y 4, d,1), :(x L, y, d,0), 6 :(x R, y 6, d,0) With these vertex coordinates, the equation for each plane of the background model can be obtained. The plane that contains a point p =(x 1,x 2,x 3,x 4 ) satisfies π 1 x 1 + π 2 x 2 + π 3 x 3 + π 4 x 4 = 0. Let the coordinates of the three distinct points q, r, s be (q 1,q 2,q 3,q 4 ),(r 1,r 2,r 3,r 4 ), (s 1,s 2,s 3,s 4 ), respectively. Then, the coefficients of the plane containing these points are computed as follows: π 1 = π 3 = q 2 q 3 q 4 r 2 r 3 r 4 s 2 s 3 s 4 q 1 q 2 q 4 r 1 r 2 r 4 s 1 s 2 s 4, π 2 =, π 4 = q 1 q 3 q 4 r 1 r 3 r 4 s 1 s 3 s 4 q 1 q 2 q 3 r 1 r 2 r 3 s 1 s 2 s 3,. Using the above equations, the is computed from vertices 2,4, (or 6 ), and the back plane is computed from vertices 1,3, (or 6 ). The resulting plane equations are used for constructing the scene model and for rendering, which will be discussed in Section 4, and, respectively Discussion Based on projective geometry, our scheme is simple and yet general enough to cover a broader class of images than that of Horry et al. For a one-point perspective image, the left wall, the right wall, and the ceiling, constructed by the standard spidery mesh, can be modeled as foreground objects with our scheme. For a perspective image with two vanishing points, our scheme is still applicable since those points lie on a vanishing line. As mentioned in Section 2, the simplified spidery mesh of Horry et al. is used for an image that has no clearly identified. This simplified spidery mesh looks similar to our modeling scheme since both of the resulting background models consist of only two quadrangles. That is, the rear wall and the floor of their model look similar to back and s of our model, respectively.
5 However, the back plane is located at infinity together with the vanishing line, while the rear wall is placed at some place of finite distance from the original viewpoint to prevent the camera from going beyond it. floor rear wall floor rear wall back plane vanishing line (a) Simplified model of Horry et al. (b) another simplified model (c) our model Figure 6: Comparison between the simplified background model of Horry et al. and our model Fig. 6 shows an image which needs the simplified spidery mesh when the method of Horry et al is adopted. The horizon (i.e., the vanishing line) divides the image into two regions for both schemes. According to projective geometry, a should lie somewhere on this vanishing line. However, as shown in the Fig. 6a, the vanishing point is not placed on the vanishing line with the simplified spidery mesh, which is a contradiction. Suppose that we place the on the bottom edge of the rear wall (where the vanishing line is located in this image). Then, the floor would disappear in their background model. To avoid this, we have to place the vanishing line inside the rear wall as shown in Fig. 6b. Unfortunately, it causes the ground in the image to be divided into two perpendicular planes in 3D space. On the contrary, our background model is well suited for this image as shown in Fig. 6c. 4. Foreground model A foreground object specified in the image is modeled as a 3D polygon, and the coordinates of its vertices are computed by finding the intersection points between the and the ray starting from the viewpoint and passing through the corresponding vertices in the image plane. For example, the foreground object in Fig. 7 is modeled as a quadrangle with four vertices P 0,P 1,P 2, and P 3. These vertices have the corresponding vertices P 0,P 1,P 2, and P 3 in the image. Given a plane Π whose coefficients are π 1,π 2,π 3,π 4, and two arbitrary points q and r, the intersection point p between Π and the line containing q and r is given as follows: p =( q π T ) r ( r π T ) q (1) where π =(π 1,π 2,π 3,π 4 ) 16. This equation gives the coordinates of the vertices P 0 and P 1 (on the ). That is, P 0 is the intersection of the with a line containing the viewpoint and P 0. P 1 is found similarly. The plane equation for the foreground polygon is then computed with an assumption that the polygon stands perpendicular to the. With the plane equation thus obtained, the coordinates for the remaining vertices P 2,P 3 are computed. By attaching all such polygons to the, the scene model is completed. As proposed in 13, a foreground object can have a hierarchical structure in a more complex environment. That is, another foreground object can be attached on a foreground object standing on the to form a hierarchical structure. The wall and the ceiling generated by the standard spidery mesh can be modeled as a hierarchical foreground object with our scheme. As mentioned in Section 2, the method of Horry et al. requires an input image and a foreground mask to render the foreground objects. Assuming that there is no foreground object occluding others, the input image gives the RGB color information of the foreground objects, and the foreground mask gives the alpha values specifying the exact portion of those objects. Instead of splitting the information in separate images, we use a single RGBA image called foreground image, which is generated by appending the alpha values of the foreground mask to the input image. That is, the foreground image consists of both the RGB components and the alpha values for the foreground objects. The alpha value of 1 is assigned inside the foreground object, and the value of 0 is assigned elsewhere to show the background model. To enable the smooth transition from the foreground to the background, a fractional value between 0 and 1 is assigned in the boundary of the foreground object. The foreground image thus obtained is texture-mapped onto the corresponding foreground polygon. FG3 FG2 FG1 FG1 FG2 FG3 Figure 8: Foreground objects and corresponding foreground images background model P 3 P 0 P 2 P 1 image plane P 2 P 3 P 1 P 0 O (camera) Figure 7: Vertex coordinates of the foreground objects When there are foreground objects occluding others in the image, the occluded portions of the foreground objects should be restored to generate an image from a new viewpoint. As suggested in 14, multiple foreground images are required in this case so that each occluded object can be associated with its corresponding foreground image. Each foreground image is obtained by recovering the occluded region of the corresponding foreground object using a convenc The Eurographics Association and Blackwell Publishers 2001.
6 tional 2D painting tool. In addition, appropriate alpha values are assigned to specify the exact portion of the recovered foreground object. Each of these foreground images is texture-mapped on the corresponding foreground polygon. Fig. 8 shows an image where some foreground objects are occluded by others. Their corresponding foreground images are also shown on the right.. Rendering An output image is generated by determining which part of the scene model is viewed by the camera through each pixel of the image. As shown in Fig. 9, we find the location of a point P on the scene model which is viewed through each pixel P O of the output image from a given camera, by intersecting the viewing ray with the polygons in the scene model. Provided with the initial camera position and orientation, the point P R in the reference image corresponding to the point P can be computed. The pixel P O is then assigned the same color as that of the point P R. To reduce the aliasing artifact, the color of P R is decided by bilinearly interpolating those of the four nearest pixels. If P is on the background model, the background image is used as a reference image. Otherwise, P is on one of the foreground polygons. In this case, the alpha value of P R in the corresponding foreground image is checked to see if P is inside an object in a foreground model. If the alpha value is 1, then P is inside the foreground object and the color of P R is assigned to P O. However, if the alpha value is less than 1, P is outside or on the boundary of the foreground object and additional checks are done to find the next intersection point P in the scene model. Thus, the color of P O is decided by blending the color of P and that of P with the specified alpha value. This process is repeated until the next intersection point is either on a background model or on a foreground object whose alpha value is 1 at that point. scene model projection mentioned in the previous section, the appropriate alpha values in the foreground images are referenced to render the foreground objects correctly. In hardware texture mapping, the graphics engine performs automatic perspective correction on the texture coordinates. In our case, however, the texture maps have already gone through the necessary perspective distortion. This means that simply assigning the texture coordinates to the corresponding vertices produces incorrect results caused by double perspective corrections. To avoid this, we transform the texture coordinates according to the depths of the corresponding vertices so that the automatic perspective correction is nullified. Details of this transformation is described in Extension to panoramic images In this section, we show how to extend our modeling scheme to a panoramic image such as cylindrical or spherical image. Since the spherical image is regarded as the most general form of panoramic image, we focus on demonstrating our modeling scheme for a spherical image. For other types of panorama images, this scheme can easily be adapted Background model In a (spherical) panorama image, the environment viewed from a camera is mapped onto the base sphere centered at the camera position. As shown in Fig. 10, parallel lines A and B on the are projected onto this sphere as arcs A and B, respectively. A and B intersect at a point on the base sphere referred to as a of the spherical image. Since A and B on the take on any inclinations, the set of all s on the sphere form a circle, that is the intersection of the base sphere with the horizon plane. This circle is said to be a vanishing circle that is analogous to the vanishing line for the planar image. P O P P R base sphere vanishing circle camera reference image horizon plane l output image color Figure 9: Rendering mechanism π A π B a A B a A eye B However, it is time-consuming to find P and P R for every pixel P O in the output image. Instead, we use hardware texture mapping with OpenGL. Since an infinite value is not allowed in OpenGL, we should set the last component of the homogeneous coordinates for the back plane to have an infinitesimally small value. The background image is divided by the vanishing line into two subimages, which are texturemapped onto the two polygons of the background model, respectively. For each of the foreground polygons, the corresponding foreground image is used as a texture map. As Figure 10: Vanishing point and vanishing circle The vanishing circle divides the base sphere into two disjoint hemispheres. The lower hemisphere corresponds to the in the 3D environment, and the upper hemisphere corresponds to the space above the. Thus, the vanishing circle can be thought of as the horizon that separates the earth represented by the from
7 the sky. If we inversely project the vanishing circle back to the scene, it is mapped to a set of points at infinity on the. Each of these points is an ideal point on a line connecting the viewpoint and a point on the vanishing circle. Instead of the back plane in the background model for a planar image, we use a hemisphere of an arbitrarily large radius centered at the camera position. In analogy to the back plane, we call it the back hemisphere. We first specify the vanishing circle interactively and then project the upper hemisphere of the base sphere on the back hemisphere. The lower hemisphere is projected onto the. In practice, the back hemisphere is set to have some finite radius to avoid computational dificulty. This is equivalent to slightly moving down the vanishing circle from the horizon plane. back hemisphere y (=3 ) (θ, φ) 4 (=4 ) z 6 6 φ A B φv O 1 2 θ base sphere vanishing circle Figure 11: Point correspondences between the base sphere and the background model The correspondence between the points on the base sphere and those on the background model is illustrated in Fig. 11. The base sphere is centered at the origin O and has two poles, that is, points and 6. Consider great arcs A and B on the base sphere. Let points 1 and 2 be the intersections of A and B with the vanishing circle, respectively. Their intersections with the are points 3 and 4, respectively. Arc A contains points 6, 1 and, and arc B does points 6, 2, and. Points 1 and 2 are mapped to points 1 and 2 on the bottom circle of the back hemisphere. The points 3 and 4 are coincident with their projections, that is, points 3 and 4 on the. Points and 6 are mapped to points and 6. Point is on the, and point 6 is on the back hemisphere. Thus, the region 6, 1, 2 on the base sphere are projected to the region 6,1,2 on the back hemisphere, the region 1,2,3,4 to the region 1,2,3,4 on the, and finally the region 3,4, to region 3,4, on the ground plane. Now, we show how to compute the position of the point on the background model, corresponding to a point on the base sphere. Without loss of generality, we assume that the camera is positioned at the origin, the initial view-up vector is towards +z, the horizon plane is coincident with the x-y plane, and the height of the camera from the ground plane is h. We use a spherical coordinate (θ,φ) for each x point on the base sphere. Let φ v denote the angle between the positive z-axis and the vector from the origin to a point on the vanishing circle. If φ < φ v, then the projected point is on the back hemisphere; otherwise, it is mapped on the. The radius R of the back hemisphere is h/cosφ v. Therefore, a point (θ,φ) is projected to the point ( hcosθsinφ/cosφ v, hsinθsinφ/cosφ v, hcosφ/cosφ v) on the back hemisphere if φ < φ v; otherwise, it goes to (h cos θ tanφ, h sinθ tanφ, h) on the. The background image for the background model is obtained in a similar way to that for the planar image. The foreground objects are interactively segmented out from the panoramic image and filled by inpainting techniques 17, 18, 19. Again, we divide the image into two disjoint subimages using the line on the background image corresponding to the vanishing circle of the base sphere. The upper subimage serves as a texture map for the back hemisphere, and the lower subimage for the. When we use a hardware texture mapping, we have to make sure all the texture maps are for linear (line-to-line) perspective mapping. Since the spherical image contains a line-to-arc map, we cannot directly use this image as a texture map for the. Thus, aside from the transformation avoiding incorrect results caused by double perspective corrections (see Section ), the lower subimage of a spherical image needs an additional transformation to be used as a texture map for the. That is, we convert the non-linear map into a linear map using a projective mapping from the base sphere onto the Foreground model A foreground object for a panoramic image is interactively specified as a polygon standing on the. We compute the coordinates for the two vertices of the polygon on the. Those vertices form the bottom edge of the polygon on which it stands. Assuming that the foreground polygon stands vertically to the, the coordinates of the remaining vertices are computed using Equation 1 in Section 4. In Fig. 12, foreground objects A and B on the base sphere are respectively modeled as a polygonal object A and B standing on a. Note that A is modeled inside the base sphere since the bottom of the object appears under the. On the other hand, the object B, whose bottom falls between the horizon plane and the, goes outside the base sphere. The scene model is completed when all the foreground polygons are attached on the. The foreground image for each foreground object is obtained from the base object. Similar to the background image, we cannot directly use the panoramic image since it is a non-linear texture map. By converting it into a linear map, we obtain the foreground image. To do this, we first set a bounding rectangle of the foreground polygon on a plane
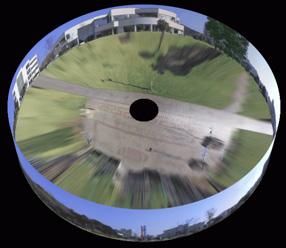
8 back hemisphere A A O base sphere B B Figure 12: Foreground model for a spherical image containing it and then project onto this rectangle the portion of the panoramic image which is visible from the camera through the rectangle. The resulting image on the rectangle provides a correct linear map to be used as a foreground image of the object. The exact portion of the foreground object is determined by assigning appropriate alpha values after interactive segmentation of the foreground image. With all the texture images thus obtained, we generate a novel view from a desired camera position by rendering the constructed scene model. 7. Experimental Results Fig. 13 illustrates how to generate an image viewed from a new viewpoint. Given an input image (Fig. 13a), the vanishing line and the foreground objects are interactively specified (Fig. 13b). Based on the specification, the 3D scene model is constructed and the texture images such as those in Figs. 13c and 13d are prepared. Fig. 13e is an image generated after moving the camera forward from its initial position in the scene. Note that only the foreground objects are scaled, leaving the background fixed. This type of result cannot be obtained just by scaling the image. Fig. 14b shows the individual foreground images whose occluded regions are recovered. Each of these images is to be texture-mapped onto the corresponding foreground object. The pixels not covered by a foreground object are marked with an alpha value of 0 in the foreground image so that they do not appear in the output image. Even a new object that does not exist in the input image can be inserted into the scene model with its foreground image. Fig. 14c is the scene image obtained after moving the camera close to the foreground objects. As shown in this figure, the occluded portion of a house is recovered (the second foreground image), and a man who does not appear in the input image, is added as a foreground object beside the front house (the last foreground image). Fig. 1 illustrates a case with an image containing two s. These s are formed by two distinct roads in the scene. Although Horry et al. proposed a modeling scheme for an image with two s, it is not suitable for this image since their scheme only deals with the case where the two s are formed by a box-shaped structure in the image. Their standard spidery mesh is not suitable either since only one of the two vanishing points should be selected to construct the background model, resulting that the other one appears on the left or the right wall. In Fig. 16, our modeling scheme is compared with that of Horry et al. by applying them to the same picture. As shown in Fig. 16a, the is clearly identified in this input image. When the scheme of Horry et al. is applied to this image, the is placed inside the rear wall and thus a straight line (the railroad in the input image) bends as the camera moves leftward or rightward (Fig. 16b). However, the straight line is preserved with our scheme since the image is divided by the vanishing line so that the ground plane or the back plane is prevented from being separated into multiple planes. Fig. 16c shows our model viewed from the same camera position as that of the Fig. 16b. Fig. 17 shows the result of our scheme applied to a picture which was used in 14. The scene in the Fig. 17a is well suited for the scheme of Horry et al. since only one vanishing point is formed by the road in the image, and the buildings are placed on both sides of the road. Their scheme (i.e., the standard spidery mesh) constructs the background model by assigning the left buildings in the image to the left wall, the right buildings to the right wall, the building in the middle to the rear wall, the ground to the floor, and the sky to the ceiling. All the remaining objects are modeled as foreground objects. On the other hand, our scheme constructs the background model just with the ground and the sky in the image, and all the buildings and other objects are considered as foreground objects (Fig. 17b). Yet, a similar result to that of Horry et al. can be generated with our scheme as shown in Fig. 17c. Fig. 18 demonstrates our extended modeling scheme applied to a spherical panoramic image. Given an input spherical image (Fig. 18a), the scene model is constructed based on the location of a vanishing circle (Fig. 18b). Fig. 18c e are some output images obtained from novel viewpoints other than the center of the base sphere. The 3D parallax effects shown in these images cannot be generated by typical panoramic image viewers. Similarly, results for a cylindrical input image are shown in Fig. 19. Unlike for the spherical image, there appears a hole at the center of since the cylindrical image has no information for this region. This hole, however, can be easily recovered by inpainting techniques since the corresponding spot in the scene tends to be flat and contains no important objects, considering that the photographer stood on this spot for taking pictures. The rendering speed is dependent on the number of foreground objects in the image and the image size. Our system is implemented in C++ with OpenGL library on Intel Pentium R PC (PIII 800 MHz processor and 12 MB
9 memory) equipped with nvidia GeForce2GTS R graphics processor. On average, the output sequence of images with pixels is generated at an interactive rate (over 100 frames/sec). 8. Conclusions and Future work In this paper, we proposed a new modeling scheme for TIP based on a vanishing line. We first divide the input image into two regions by the vanishing line, and then construct the scene model consisting of two planes corresponding to those regions in the image. According to projective geometry, these planes represent the background of infinite distance and the ground on which the viewer stands, respectively. Our scheme is simpler than the spidery mesh of Horry et al., and yet more general to cover a broader class of input images. We also have shown our modeling scheme is naturally extended to navigation into a panoramic image. Based on a vanishing circle which is analogous to the vanishing line in a planar image, the scene model for a panoramic image is interactively constructed, which is then used for navigation. Compared to the conventional panoramic viewers (such as QuickTime VR R ) which allows camera pan, tilt, and zoom control from only a fixed viewpoint, we provide the real sense of walk-through or navigation into the panoramic scene by enabling continuous camera translation as well as rotation. We are currently working on extending our scheme to a video stream, that is, a sequence of images. Exploiting time coherence, we believe that our scheme can be enhanced to handle an interesting class of scenes in videos such as sports games and cartoon animations that have a static background and some moving foreground objects. 9. Acknowledgements This work has been supported by the NRL (National Research Laboratory) project of KISTEP (Korea Institute of Science & Technology Evaluation and Planning). References 1. A. Lippman. Movie Maps: An Application of the Optical Videodisc to Computer Graphics, ACM SIGGRAPH 80 Conference Proceedings, pp (August 1980) A. R. Mohl. Cognitive Space in the Interactive Movie Map: an Investigation of Spatial Learning in the Virtual Environments, PhD Thesis, MIT, G. Miller, E. Hoffert, S. E. Chen, E. Patterson, D. Blackketter, S. Rubin, S. A. Applin, D. Yim, and J. Hanan. The Virtual Musuem: Interactive 3D Navigation of a Multimedia Database, The Journal of Visualization and Computer Animation, 3, pp (August 1992) S. E. Chen. QuickTime VR - An Image-Based Approach to Virtual Environment Navigation, ACM SIGGRAPH 9 Conference Proceedings, pp (August 199). 2. S. E. Chen and L. Williams. View Interpolation for Image Synthesis, ACM SIGGRAPH 93 Conference Proceedings, pp (August 1993) L. Darsa, B. C. Silva, and A. Varshney. Navigating Static Environments Using Image-Space Simplification and Morphing, Proc Symposium on Interactive 3D Graphics, pp (April 1997). 2, 6 7. L. McMillan and G. Bishop. Plenoptic Modeling: An Image- Based Rendering System, ACM SIGGRAPH 9 Conference Proceedings, pp (August 199) W. R. Mark and L. McMillan and G. Bishop. Post-Rendering 3D Warping, Proceedings 1997 Symposiums on Interactive 3D Graphics, pp (1997) M. Levoy and P. Hanrahan. Light Field Rendering, ACM SIGGRAPH 96 Conference Proceedings, pp (August 1996) S. J. Gortler, R. Grzeszczuk, R. Szeliski, and M. F. Cohen. The Lumigraph, ACM SIGGRAPH 96 Conference Proceedings, pp (August 1996) P. -P. Sloan, M. F. Cohen, and S. J. Gortler. Time Critical Lumigraph Rendering, Proceedings 1997 Symposium on Interactive 3D Graphics, pp (1997) P. E. Debevec, C. J. Taylor, and J. Malik. Modeling and rendering architecture from photographs: A hybrid geometryand image- based approach, ACM SIGGRAPH 96 Conference Proceedings, pp (August 1996) Y. Horry, K. Anjyo, and K. Arai. Tour Into the Picture: Using a Spidery Mesh Interface to Make Animation from a Single Image, ACM SIGGRAPH 97 Conference Proceedings, pp (August 1997). 1, 14. K. Anjyo and Y. Horry. Theory and Practice of Tour Into the Picture. InCourse Notes #8 (SIGGRAPH 98), ,, 8 1. D. Liebowitz, A. Criminisi, and A. Zisserman. Creating Architectural Models from Images, EuroGraphics 99 Conference Proceedings, pp (September 1999) M. A. Penna and R. R. Patterson. Projective Geometry and Its Applications to Computer Graphics. Prentice-Hall, , 17. A. A. Efros and T. K. Leung. Texture Synthesis by Nonparametric Sampling, Proceedings of IEEE International Conference on Computer Vision, (1999) M. Bertalmio, G. Sapiro, V. Caselles, and C. Ballester. Image Inpainting, ACM SIGGRAPH 2000 Conference Proceedings, pp (August 2000) L.-Y. Wei, M. Levoy. Fast Texture Synthesis using Treestructured Vector Quantization, ACM SIGGRAPH 2000 Conference Proceedings, pp (August 2000). 7



 User")
")


")



 Moving")

")

")


 Output")
 Output")


10 H. Kang, S. Pyo, K. Anjyo, and S. Shin / Tour Into the Picture using a Vanishing Line and its Extension to Panoramic Images (a) Input image (b) User s specification (c) Foreground image (d) Background image (e) Output image Figure 13: Generating a scene from a new camera position (a) Initial scene (b) Foreground images for the foreground objects (c) Moving forward Figure 14: Multi layered foreground objects (a) Initial scene (b) Moving toward the left (b) Moving toward the right Figure 1: Image with multiple s (a) Input image (b) Specification (c) Moving forward Figure 17: One point perspective image (a) Input image (b) Model of Horry et al. (c) Our model Figure 16: Image distortion (a) Spherical image (b) Scene model (c) Output image 1 (d) Output image 2 (e) Output image 3 (c) Output image 1 (d) Output image 2 Figure 18: Spherical panoramic image (a) Cylindrical image (b) Scene model Figure 19: Cylindrical panoramic image c The Eurographics Association and Blackwell Publishers 2001.
Projective Texture Mapping with Full Panorama
 EUROGRAPHICS 2002 / G. Drettakis and H.-P. Seidel Volume 21 (2002), Number 3 (Guest Editors) Projective Texture Mapping with Full Panorama Dongho Kim and James K. Hahn Department of Computer Science, The
EUROGRAPHICS 2002 / G. Drettakis and H.-P. Seidel Volume 21 (2002), Number 3 (Guest Editors) Projective Texture Mapping with Full Panorama Dongho Kim and James K. Hahn Department of Computer Science, The
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Image-Based Deformation of Objects in Real Scenes
 Image-Based Deformation of Objects in Real Scenes Han-Vit Chung and In-Kwon Lee Dept. of Computer Science, Yonsei University sharpguy@cs.yonsei.ac.kr, iklee@yonsei.ac.kr Abstract. We present a new method
Image-Based Deformation of Objects in Real Scenes Han-Vit Chung and In-Kwon Lee Dept. of Computer Science, Yonsei University sharpguy@cs.yonsei.ac.kr, iklee@yonsei.ac.kr Abstract. We present a new method
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India
 A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
A Review of Image- based Rendering Techniques Nisha 1, Vijaya Goel 2 1 Department of computer science, University of Delhi, Delhi, India Keshav Mahavidyalaya, University of Delhi, Delhi, India Abstract
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments
 Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Tour into the picture with water surface reflection and object movements. By Jinho Park, Nambin Heo, Sunghee Choi and Sung Yong Shin ...
 COMPUTER ANIMATION AND VIRTUAL WORLDS Comp. Anim. Virtual Worlds 2006; 17: 315 324 Published online in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/cav.135 Tour into the picture with water
COMPUTER ANIMATION AND VIRTUAL WORLDS Comp. Anim. Virtual Worlds 2006; 17: 315 324 Published online in Wiley InterScience (www.interscience.wiley.com). DOI: 10.1002/cav.135 Tour into the picture with water
Creating Walk-through Images from a Video Sequence of a Dynamic Scene
 Creating Walk-through Images from a Video Sequence of a Dynamic Scene Hyung W. Kang and Sung Yong Shin University of Missouri - St. Louis One University Blvd. St. Louis, MO 63121 e-mail: kang@cs.umsl.edu
Creating Walk-through Images from a Video Sequence of a Dynamic Scene Hyung W. Kang and Sung Yong Shin University of Missouri - St. Louis One University Blvd. St. Louis, MO 63121 e-mail: kang@cs.umsl.edu
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, Breaking out of 2D now we are ready to break out of 2D And enter the
Image Base Rendering: An Introduction
 Image Base Rendering: An Introduction Cliff Lindsay CS563 Spring 03, WPI 1. Introduction Up to this point, we have focused on showing 3D objects in the form of polygons. This is not the only approach to
Image Base Rendering: An Introduction Cliff Lindsay CS563 Spring 03, WPI 1. Introduction Up to this point, we have focused on showing 3D objects in the form of polygons. This is not the only approach to
A simple method for interactive 3D reconstruction and camera calibration from a single view
 A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
A simple method for interactive 3D reconstruction and camera calibration from a single view Akash M Kushal Vikas Bansal Subhashis Banerjee Department of Computer Science and Engineering Indian Institute
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James with a lot of slides stolen from Steve Seitz and David Brogan, 15-463: Computational Photography Alexei Efros, CMU, Fall 2005 Classes
Image-Based Rendering. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
Optimizing an Inverse Warper
 Optimizing an Inverse Warper by Robert W. Marcato, Jr. Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of Bachelor
Optimizing an Inverse Warper by Robert W. Marcato, Jr. Submitted to the Department of Electrical Engineering and Computer Science in Partial Fulfillment of the Requirements for the Degrees of Bachelor
Scene Modeling for a Single View
 Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Scene Modeling for a Single View René MAGRITTE Portrait d'edward James CS194: Image Manipulation & Computational Photography with a lot of slides stolen from Alexei Efros, UC Berkeley, Fall 2014 Steve
Efficiently Modeling 3D Scenes from a Single Image
 Efficiently Modeling 3D Scenes from a Single Image Satoshi Iizuka 1 Yoshihiro Kanamori 1 Jun Mitani 1,2 Yukio Fukui 1 1 University of Tsukuba 2 JST ERATO e-mail: iizuka@npal.cs.tsukuba.ac.jp {kanamori,
Efficiently Modeling 3D Scenes from a Single Image Satoshi Iizuka 1 Yoshihiro Kanamori 1 Jun Mitani 1,2 Yukio Fukui 1 1 University of Tsukuba 2 JST ERATO e-mail: iizuka@npal.cs.tsukuba.ac.jp {kanamori,
A million pixels, a million polygons. Which is heavier? François X. Sillion. imagis* Grenoble, France
 A million pixels, a million polygons. Which is heavier? François X. Sillion imagis* Grenoble, France *A joint research project of CNRS, INRIA, INPG and UJF MAGIS Why this question? Evolution of processing
A million pixels, a million polygons. Which is heavier? François X. Sillion imagis* Grenoble, France *A joint research project of CNRS, INRIA, INPG and UJF MAGIS Why this question? Evolution of processing
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Nonphotorealistic Virtual Environment Navigation from Images
 Nonphotorealistic Virtual Environment Navigation from Images Hyung W. Kang Department of Mathematics and Computer Science University of Missouri - St. Louis One University Blvd. St. Louis, MO 63121, USA
Nonphotorealistic Virtual Environment Navigation from Images Hyung W. Kang Department of Mathematics and Computer Science University of Missouri - St. Louis One University Blvd. St. Louis, MO 63121, USA
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Inexpensive Construction of a 3D Face Model from Stereo Images
 Inexpensive Construction of a 3D Face Model from Stereo Images M. Shahriar Hossain, Monika Akbar and J. Denbigh Starkey Department of Computer Science, Montana State University, Bozeman, MT 59717, USA.
Inexpensive Construction of a 3D Face Model from Stereo Images M. Shahriar Hossain, Monika Akbar and J. Denbigh Starkey Department of Computer Science, Montana State University, Bozeman, MT 59717, USA.
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Rendering. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric( info) as key component of model representation What s Good about IBR Model acquisition
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration
 ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
ATIP A Tool for 3D Navigation inside a Single Image with Automatic Camera Calibration Kévin Boulanger, Kadi Bouatouch, Sumanta Pattanaik IRISA, Université de Rennes I, France University of Central Florida,
Implementation of a panoramic-based walkthrough system
 Implementation of a panoramic-based walkthrough system Abstract A key component in most virtual reality systems is the ability to perform a walkthrough of a virtual environment from different viewing positions
Implementation of a panoramic-based walkthrough system Abstract A key component in most virtual reality systems is the ability to perform a walkthrough of a virtual environment from different viewing positions
But, vision technology falls short. and so does graphics. Image Based Rendering. Ray. Constant radiance. time is fixed. 3D position 2D direction
 Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Computer Graphics -based rendering Output Michael F. Cohen Microsoft Research Synthetic Camera Model Computer Vision Combined Output Output Model Real Scene Synthetic Camera Model Real Cameras Real Scene
Hybrid Rendering for Collaborative, Immersive Virtual Environments
 Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
Hybrid Rendering for Collaborative, Immersive Virtual Environments Stephan Würmlin wuermlin@inf.ethz.ch Outline! Rendering techniques GBR, IBR and HR! From images to models! Novel view generation! Putting
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Light Fields. Johns Hopkins Department of Computer Science Course : Rendering Techniques, Professor: Jonathan Cohen
 Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Light Fields Light Fields By Levoy and Hanrahan, SIGGRAPH 96 Representation for sampled plenoptic function stores data about visible light at various positions and directions Created from set of images
Rendering by Manifold Hopping
 International Journal of Computer Vision 50(2), 185 201, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Rendering by Manifold Hopping HEUNG-YEUNG SHUM, LIFENG WANG, JIN-XIANG
International Journal of Computer Vision 50(2), 185 201, 2002 c 2002 Kluwer Academic Publishers. Manufactured in The Netherlands. Rendering by Manifold Hopping HEUNG-YEUNG SHUM, LIFENG WANG, JIN-XIANG
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Real Time Rendering. CS 563 Advanced Topics in Computer Graphics. Songxiang Gu Jan, 31, 2005
 Real Time Rendering CS 563 Advanced Topics in Computer Graphics Songxiang Gu Jan, 31, 2005 Introduction Polygon based rendering Phong modeling Texture mapping Opengl, Directx Point based rendering VTK
Real Time Rendering CS 563 Advanced Topics in Computer Graphics Songxiang Gu Jan, 31, 2005 Introduction Polygon based rendering Phong modeling Texture mapping Opengl, Directx Point based rendering VTK
Texture. Texture Mapping. Texture Mapping. CS 475 / CS 675 Computer Graphics. Lecture 11 : Texture
 Texture CS 475 / CS 675 Computer Graphics Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. Lecture 11 : Texture http://en.wikipedia.org/wiki/uv_mapping
Texture CS 475 / CS 675 Computer Graphics Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. Lecture 11 : Texture http://en.wikipedia.org/wiki/uv_mapping
CS 475 / CS 675 Computer Graphics. Lecture 11 : Texture
 CS 475 / CS 675 Computer Graphics Lecture 11 : Texture Texture Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. http://en.wikipedia.org/wiki/uv_mapping
CS 475 / CS 675 Computer Graphics Lecture 11 : Texture Texture Add surface detail Paste a photograph over a surface to provide detail. Texture can change surface colour or modulate surface colour. http://en.wikipedia.org/wiki/uv_mapping
Image-Based Rendering and Light Fields
 CS194-13: Advanced Computer Graphics Lecture #9 Image-Based Rendering University of California Berkeley Image-Based Rendering and Light Fields Lecture #9: Wednesday, September 30th 2009 Lecturer: Ravi
CS194-13: Advanced Computer Graphics Lecture #9 Image-Based Rendering University of California Berkeley Image-Based Rendering and Light Fields Lecture #9: Wednesday, September 30th 2009 Lecturer: Ravi
Efficient Rendering of Glossy Reflection Using Graphics Hardware
 Efficient Rendering of Glossy Reflection Using Graphics Hardware Yoshinori Dobashi Yuki Yamada Tsuyoshi Yamamoto Hokkaido University Kita-ku Kita 14, Nishi 9, Sapporo 060-0814, Japan Phone: +81.11.706.6530,
Efficient Rendering of Glossy Reflection Using Graphics Hardware Yoshinori Dobashi Yuki Yamada Tsuyoshi Yamamoto Hokkaido University Kita-ku Kita 14, Nishi 9, Sapporo 060-0814, Japan Phone: +81.11.706.6530,
Image-Based Rendering. Image-Based Rendering
 Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric info) as key component of model representation 1 What s Good about IBR Model acquisition
Image-Based Rendering Image-Based Rendering What is it? Still a difficult question to answer Uses images (photometric info) as key component of model representation 1 What s Good about IBR Model acquisition
FAST ALGORITHM FOR CREATING IMAGE-BASED STEREO IMAGES
 FAST AGRITHM FR CREATING IMAGE-BASED STERE IMAGES Przemysław Kozankiewicz Institute of Computer Science, Warsaw University of Technology, ul. Nowowiejska 15/19, 00-665 Warsaw, Poland pkozanki@ii.pw.edu.pl
FAST AGRITHM FR CREATING IMAGE-BASED STERE IMAGES Przemysław Kozankiewicz Institute of Computer Science, Warsaw University of Technology, ul. Nowowiejska 15/19, 00-665 Warsaw, Poland pkozanki@ii.pw.edu.pl
An Algorithm for Seamless Image Stitching and Its Application
 An Algorithm for Seamless Image Stitching and Its Application Jing Xing, Zhenjiang Miao, and Jing Chen Institute of Information Science, Beijing JiaoTong University, Beijing 100044, P.R. China Abstract.
An Algorithm for Seamless Image Stitching and Its Application Jing Xing, Zhenjiang Miao, and Jing Chen Institute of Information Science, Beijing JiaoTong University, Beijing 100044, P.R. China Abstract.
A Warping-based Refinement of Lumigraphs
 A Warping-based Refinement of Lumigraphs Wolfgang Heidrich, Hartmut Schirmacher, Hendrik Kück, Hans-Peter Seidel Computer Graphics Group University of Erlangen heidrich,schirmacher,hkkueck,seidel@immd9.informatik.uni-erlangen.de
A Warping-based Refinement of Lumigraphs Wolfgang Heidrich, Hartmut Schirmacher, Hendrik Kück, Hans-Peter Seidel Computer Graphics Group University of Erlangen heidrich,schirmacher,hkkueck,seidel@immd9.informatik.uni-erlangen.de
A million pixels, a million polygons: which is heavier?
 A million pixels, a million polygons: which is heavier? François X. Sillion To cite this version: François X. Sillion. A million pixels, a million polygons: which is heavier?. Eurographics 97, Sep 1997,
A million pixels, a million polygons: which is heavier? François X. Sillion To cite this version: François X. Sillion. A million pixels, a million polygons: which is heavier?. Eurographics 97, Sep 1997,
Compositing a bird's eye view mosaic
 Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Compositing a bird's eye view mosaic Robert Laganiere School of Information Technology and Engineering University of Ottawa Ottawa, Ont KN 6N Abstract This paper describes a method that allows the composition
Visualization Insider A Little Background Information
 Visualization Insider A Little Background Information Visualization Insider 2 Creating Backgrounds for 3D Scenes Backgrounds are a critical part of just about every type of 3D scene. Although they are
Visualization Insider A Little Background Information Visualization Insider 2 Creating Backgrounds for 3D Scenes Backgrounds are a critical part of just about every type of 3D scene. Although they are
Scene Modeling for a Single View
 on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
on to 3D Scene Modeling for a Single View We want real 3D scene walk-throughs: rotation translation Can we do it from a single photograph? Reading: A. Criminisi, I. Reid and A. Zisserman, Single View Metrology
Capturing and View-Dependent Rendering of Billboard Models
 Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
Capturing and View-Dependent Rendering of Billboard Models Oliver Le, Anusheel Bhushan, Pablo Diaz-Gutierrez and M. Gopi Computer Graphics Lab University of California, Irvine Abstract. In this paper,
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 17: Recursive Ray Tracing. Where is the way where light dwelleth? Job 38:19
 Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
Lecture 17: Recursive Ray Tracing Where is the way where light dwelleth? Job 38:19 1. Raster Graphics Typical graphics terminals today are raster displays. A raster display renders a picture scan line
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Automatic Photo Popup
 Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
Automatic Photo Popup Derek Hoiem Alexei A. Efros Martial Hebert Carnegie Mellon University What Is Automatic Photo Popup Introduction Creating 3D models from images is a complex process Time-consuming
IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS
 IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS Xiaoyong Sun A Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for
IMAGE-BASED RENDERING TECHNIQUES FOR APPLICATION IN VIRTUAL ENVIRONMENTS Xiaoyong Sun A Thesis submitted to the Faculty of Graduate and Postdoctoral Studies in partial fulfillment of the requirements for
FLY THROUGH VIEW VIDEO GENERATION OF SOCCER SCENE
 FLY THROUGH VIEW VIDEO GENERATION OF SOCCER SCENE Naho INAMOTO and Hideo SAITO Keio University, Yokohama, Japan {nahotty,saito}@ozawa.ics.keio.ac.jp Abstract Recently there has been great deal of interest
FLY THROUGH VIEW VIDEO GENERATION OF SOCCER SCENE Naho INAMOTO and Hideo SAITO Keio University, Yokohama, Japan {nahotty,saito}@ozawa.ics.keio.ac.jp Abstract Recently there has been great deal of interest
5LSH0 Advanced Topics Video & Analysis
 1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
1 Multiview 3D video / Outline 2 Advanced Topics Multimedia Video (5LSH0), Module 02 3D Geometry, 3D Multiview Video Coding & Rendering Peter H.N. de With, Sveta Zinger & Y. Morvan ( p.h.n.de.with@tue.nl
Image-based modeling (IBM) and image-based rendering (IBR)
 and image-based rendering (IBR)") Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Image-based modeling (IBM) and image-based rendering (IBR) CS 248 - Introduction to Computer Graphics Autumn quarter, 2005 Slides for December 8 lecture The graphics pipeline modeling animation rendering
Simple 3D Reconstruction of Single Indoor Image with Perspe
 Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Simple 3D Reconstruction of Single Indoor Image with Perspective Cues Jingyuan Huang Bill Cowan University of Waterloo May 26, 2009 1 Introduction 2 Our Method 3 Results and Conclusions Problem Statement
Image Based Rendering
 Image Based Rendering an overview Photographs We have tools that acquire and tools that display photographs at a convincing quality level 2 1 3 4 2 5 6 3 7 8 4 9 10 5 Photographs We have tools that acquire
Image Based Rendering an overview Photographs We have tools that acquire and tools that display photographs at a convincing quality level 2 1 3 4 2 5 6 3 7 8 4 9 10 5 Photographs We have tools that acquire
An Efficient Visual Hull Computation Algorithm
 An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
Reflection & Mirrors
 Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Reflection & Mirrors Geometric Optics Using a Ray Approximation Light travels in a straight-line path in a homogeneous medium until it encounters a boundary between two different media A ray of light is
Distortion Correction for Conical Multiplex Holography Using Direct Object-Image Relationship
 Proc. Natl. Sci. Counc. ROC(A) Vol. 25, No. 5, 2001. pp. 300-308 Distortion Correction for Conical Multiplex Holography Using Direct Object-Image Relationship YIH-SHYANG CHENG, RAY-CHENG CHANG, AND SHIH-YU
Proc. Natl. Sci. Counc. ROC(A) Vol. 25, No. 5, 2001. pp. 300-308 Distortion Correction for Conical Multiplex Holography Using Direct Object-Image Relationship YIH-SHYANG CHENG, RAY-CHENG CHANG, AND SHIH-YU
Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds
 1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
1 Interactive Collision Detection for Engineering Plants based on Large-Scale Point-Clouds Takeru Niwa 1 and Hiroshi Masuda 2 1 The University of Electro-Communications, takeru.niwa@uec.ac.jp 2 The University
Efficient View-Dependent Image-Based Rendering with Projective Texture-Mapping
 Efficient View-Dependent Image-Based Rendering with Projective Texture-Mapping Paul Debevec, Yizhou Yu, and George Borshukov Univeristy of California at Berkeley debevec@cs.berkeley.edu Abstract. This
Efficient View-Dependent Image-Based Rendering with Projective Texture-Mapping Paul Debevec, Yizhou Yu, and George Borshukov Univeristy of California at Berkeley debevec@cs.berkeley.edu Abstract. This
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
Light Field Occlusion Removal
 Light Field Occlusion Removal Shannon Kao Stanford University kaos@stanford.edu Figure 1: Occlusion removal pipeline. The input image (left) is part of a focal stack representing a light field. Each image
Light Field Occlusion Removal Shannon Kao Stanford University kaos@stanford.edu Figure 1: Occlusion removal pipeline. The input image (left) is part of a focal stack representing a light field. Each image
Computer Graphics Shadow Algorithms
 Computer Graphics Shadow Algorithms Computer Graphics Computer Science Department University of Freiburg WS 11 Outline introduction projection shadows shadow maps shadow volumes conclusion Motivation shadows
Computer Graphics Shadow Algorithms Computer Graphics Computer Science Department University of Freiburg WS 11 Outline introduction projection shadows shadow maps shadow volumes conclusion Motivation shadows
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Digitization of 3D Objects for Virtual Museum
 Digitization of 3D Objects for Virtual Museum Yi-Ping Hung 1, 2 and Chu-Song Chen 2 1 Department of Computer Science and Information Engineering National Taiwan University, Taipei, Taiwan 2 Institute of
Digitization of 3D Objects for Virtual Museum Yi-Ping Hung 1, 2 and Chu-Song Chen 2 1 Department of Computer Science and Information Engineering National Taiwan University, Taipei, Taiwan 2 Institute of
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Reconstruction PSNR [db]
![Reconstruction PSNR [db]](/thumbs/72/66578785.jpg "Reconstruction PSNR [db]") Proc. Vision, Modeling, and Visualization VMV-2000 Saarbrücken, Germany, pp. 199-203, November 2000 Progressive Compression and Rendering of Light Fields Marcus Magnor, Andreas Endmann Telecommunications
Proc. Vision, Modeling, and Visualization VMV-2000 Saarbrücken, Germany, pp. 199-203, November 2000 Progressive Compression and Rendering of Light Fields Marcus Magnor, Andreas Endmann Telecommunications
Acquisition and Visualization of Colored 3D Objects
 Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
Acquisition and Visualization of Colored 3D Objects Kari Pulli Stanford University Stanford, CA, U.S.A kapu@cs.stanford.edu Habib Abi-Rached, Tom Duchamp, Linda G. Shapiro and Werner Stuetzle University
PAPER Three-Dimensional Scene Walkthrough System Using Multiple Acentric Panorama View (APV) Technique
 Technique") IEICE TRANS. INF. & SYST., VOL.E86 D, NO.1 JANUARY 2003 117 PAPER Three-Dimensional Scene Walkthrough System Using Multiple Acentric Panorama View (APV) Technique Ping-Hsien LIN and Tong-Yee LEE, Nonmembers
IEICE TRANS. INF. & SYST., VOL.E86 D, NO.1 JANUARY 2003 117 PAPER Three-Dimensional Scene Walkthrough System Using Multiple Acentric Panorama View (APV) Technique Ping-Hsien LIN and Tong-Yee LEE, Nonmembers
IMA Preprint Series # 2016
 VIDEO INPAINTING OF OCCLUDING AND OCCLUDED OBJECTS By Kedar A. Patwardhan Guillermo Sapiro and Marcelo Bertalmio IMA Preprint Series # 2016 ( January 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
VIDEO INPAINTING OF OCCLUDING AND OCCLUDED OBJECTS By Kedar A. Patwardhan Guillermo Sapiro and Marcelo Bertalmio IMA Preprint Series # 2016 ( January 2005 ) INSTITUTE FOR MATHEMATICS AND ITS APPLICATIONS
View-based Rendering: Visualizing Real Objects from Scanned Range and Color Data
 View-based Rendering: Visualizing Real Objects from Scanned Range and Color Data Kari Pulli Michael Cohen y Tom Duchamp Hugues Hoppe y Linda Shapiro Werner Stuetzle University of Washington, Seattle, WA
View-based Rendering: Visualizing Real Objects from Scanned Range and Color Data Kari Pulli Michael Cohen y Tom Duchamp Hugues Hoppe y Linda Shapiro Werner Stuetzle University of Washington, Seattle, WA
Rendering Hair-Like Objects with Indirect Illumination
 Rendering Hair-Like Objects with Indirect Illumination CEM YUKSEL and ERGUN AKLEMAN Visualization Sciences Program, Department of Architecture Texas A&M University TR0501 - January 30th 2005 Our method
Rendering Hair-Like Objects with Indirect Illumination CEM YUKSEL and ERGUN AKLEMAN Visualization Sciences Program, Department of Architecture Texas A&M University TR0501 - January 30th 2005 Our method
Ray tracing based fast refraction method for an object seen through a cylindrical glass
 20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Ray tracing based fast refraction method for an object seen through a cylindrical
20th International Congress on Modelling and Simulation, Adelaide, Australia, 1 6 December 2013 www.mssanz.org.au/modsim2013 Ray tracing based fast refraction method for an object seen through a cylindrical
CS 684 Fall 2005 Image-based Modeling and Rendering. Ruigang Yang
 CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
Visualization 2D-to-3D Photo Rendering for 3D Displays
 Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
Visualization 2D-to-3D Photo Rendering for 3D Displays Sumit K Chauhan 1, Divyesh R Bajpai 2, Vatsal H Shah 3 1 Information Technology, Birla Vishvakarma mahavidhyalaya,sumitskc51@gmail.com 2 Information
As-Built 3D Modeling of Large Facilities Based on Interactive Feature Editing
 1 As-Built 3D Modeling of Large Facilities Based on Interactive Feature Editing H. Masuda 1 and Ichiro Tanaka 2 1 The University of Tokyo, masuda@nakl.t.u-tokyo.ac.jp 2 Tokyo Denki University, tanaka@cck.dendai.ac.jp
1 As-Built 3D Modeling of Large Facilities Based on Interactive Feature Editing H. Masuda 1 and Ichiro Tanaka 2 1 The University of Tokyo, masuda@nakl.t.u-tokyo.ac.jp 2 Tokyo Denki University, tanaka@cck.dendai.ac.jp
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Interactive 3D Scene Reconstruction from Images
 Interactive 3D Scene Reconstruction from Images Aaron Hertzmann Media Research Laboratory Department of Computer Science New York University 719 Broadway, 12th Floor New York, NY 10003 hertzman@mrl.nyu.edu
Interactive 3D Scene Reconstruction from Images Aaron Hertzmann Media Research Laboratory Department of Computer Science New York University 719 Broadway, 12th Floor New York, NY 10003 hertzman@mrl.nyu.edu
Hardware-Assisted Relief Texture Mapping
 EUROGRAPHICS 0x / N.N. and N.N. Short Presentations Hardware-Assisted Relief Texture Mapping Masahiro Fujita and Takashi Kanai Keio University Shonan-Fujisawa Campus, Fujisawa, Kanagawa, Japan Abstract
EUROGRAPHICS 0x / N.N. and N.N. Short Presentations Hardware-Assisted Relief Texture Mapping Masahiro Fujita and Takashi Kanai Keio University Shonan-Fujisawa Campus, Fujisawa, Kanagawa, Japan Abstract
Overview. A real-time shadow approach for an Augmented Reality application using shadow volumes. Augmented Reality.
 Overview A real-time shadow approach for an Augmented Reality application using shadow volumes Introduction of Concepts Standard Stenciled Shadow Volumes Method Proposed Approach in AR Application Experimental
Overview A real-time shadow approach for an Augmented Reality application using shadow volumes Introduction of Concepts Standard Stenciled Shadow Volumes Method Proposed Approach in AR Application Experimental
Synthesis of Textures with Intricate Geometries using BTF and Large Number of Textured Micropolygons. Abstract. 2. Related studies. 1.
 Synthesis of Textures with Intricate Geometries using BTF and Large Number of Textured Micropolygons sub047 Abstract BTF has been studied extensively and much progress has been done for measurements, compression
Synthesis of Textures with Intricate Geometries using BTF and Large Number of Textured Micropolygons sub047 Abstract BTF has been studied extensively and much progress has been done for measurements, compression
Simple Silhouettes for Complex Surfaces
 Eurographics Symposium on Geometry Processing(2003) L. Kobbelt, P. Schröder, H. Hoppe (Editors) Simple Silhouettes for Complex Surfaces D. Kirsanov, P. V. Sander, and S. J. Gortler Harvard University Abstract
Eurographics Symposium on Geometry Processing(2003) L. Kobbelt, P. Schröder, H. Hoppe (Editors) Simple Silhouettes for Complex Surfaces D. Kirsanov, P. V. Sander, and S. J. Gortler Harvard University Abstract
Physics for Scientists & Engineers 2
 Geometric Optics Physics for Scientists & Engineers 2 Spring Semester 2005 Lecture 36! The study of light divides itself into three fields geometric optics wave optics quantum optics! In the previous chapter,
Geometric Optics Physics for Scientists & Engineers 2 Spring Semester 2005 Lecture 36! The study of light divides itself into three fields geometric optics wave optics quantum optics! In the previous chapter,
TSBK03 Screen-Space Ambient Occlusion
 TSBK03 Screen-Space Ambient Occlusion Joakim Gebart, Jimmy Liikala December 15, 2013 Contents 1 Abstract 1 2 History 2 2.1 Crysis method..................................... 2 3 Chosen method 2 3.1 Algorithm
TSBK03 Screen-Space Ambient Occlusion Joakim Gebart, Jimmy Liikala December 15, 2013 Contents 1 Abstract 1 2 History 2 2.1 Crysis method..................................... 2 3 Chosen method 2 3.1 Algorithm
Rendering Grass Terrains in Real-Time with Dynamic Lighting. Kévin Boulanger, Sumanta Pattanaik, Kadi Bouatouch August 1st 2006
 Rendering Grass Terrains in Real-Time with Dynamic Lighting Kévin Boulanger, Sumanta Pattanaik, Kadi Bouatouch August 1st 2006 Goal Rendering millions of grass blades, at any distance, in real-time, with:
Rendering Grass Terrains in Real-Time with Dynamic Lighting Kévin Boulanger, Sumanta Pattanaik, Kadi Bouatouch August 1st 2006 Goal Rendering millions of grass blades, at any distance, in real-time, with:
Model-Based Stereo. Chapter Motivation. The modeling system described in Chapter 5 allows the user to create a basic model of a
 96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
96 Chapter 7 Model-Based Stereo 7.1 Motivation The modeling system described in Chapter 5 allows the user to create a basic model of a scene, but in general the scene will have additional geometric detail
Mosaics, Plenoptic Function, and Light Field Rendering. Last Lecture
 Mosaics, Plenoptic Function, and Light Field Rendering Topics in Image-ased Modeling and Rendering CSE291 J00 Lecture 3 Last Lecture Camera Models Pinhole perspective Affine/Orthographic models Homogeneous
Mosaics, Plenoptic Function, and Light Field Rendering Topics in Image-ased Modeling and Rendering CSE291 J00 Lecture 3 Last Lecture Camera Models Pinhole perspective Affine/Orthographic models Homogeneous
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
A Hybrid LOD-Sprite Technique for Interactive Rendering of Large Datasets
 A Hybrid LOD-Sprite Technique for Interactive Rendering of Large Datasets Baoquan Chen 1 J. Edward Swan II 2 Arie Kaufman 1 Abstract We present a new rendering technique, termed LOD-sprite rendering, which
A Hybrid LOD-Sprite Technique for Interactive Rendering of Large Datasets Baoquan Chen 1 J. Edward Swan II 2 Arie Kaufman 1 Abstract We present a new rendering technique, termed LOD-sprite rendering, which
ABSTRACT. BORSE, JITENDRA ARUN. Real-time Image Based Rendering for Stereo Views of Vegetation. (Under the direction of Dr.
 ABSTRACT BORSE, JITENDRA ARUN. Real-time Image Based Rendering for Stereo Views of Vegetation. (Under the direction of Dr. David McAllister) Rendering of detailed vegetation for real-time applications
ABSTRACT BORSE, JITENDRA ARUN. Real-time Image Based Rendering for Stereo Views of Vegetation. (Under the direction of Dr. David McAllister) Rendering of detailed vegetation for real-time applications
SYSTEM FOR ACTIVE VIDEO OBSERVATION OVER THE INTERNET
 SYSTEM FOR ACTIVE VIDEO OBSERVATION OVER THE INTERNET Borut Batagelj, Peter Peer, Franc Solina University of Ljubljana Faculty of Computer and Information Science Computer Vision Laboratory Tržaška 25,
SYSTEM FOR ACTIVE VIDEO OBSERVATION OVER THE INTERNET Borut Batagelj, Peter Peer, Franc Solina University of Ljubljana Faculty of Computer and Information Science Computer Vision Laboratory Tržaška 25,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection
 3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
Image Warping and Mosacing
 Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
Image Warping and Mosacing 15-463: Rendering and Image Processing Alexei Efros with a lot of slides stolen from Steve Seitz and Rick Szeliski Today Mosacs Image Warping Homographies Programming Assignment
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Evolution of Imaging Technology in Computer Graphics. Related Areas
 Evolution of Imaging Technology in Computer Graphics Jonas Gomes Rio de Janeiro http://www.visgraf.impa.br Image computation Related Areas 1 Related Areas An integrated view Problems on the frontiers Graphical
Evolution of Imaging Technology in Computer Graphics Jonas Gomes Rio de Janeiro http://www.visgraf.impa.br Image computation Related Areas 1 Related Areas An integrated view Problems on the frontiers Graphical