Photo Tourism: Exploring Photo Collections in 3D
|
|
|
- Garry Chambers
- 5 years ago
- Views:
Transcription




1 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 15,464 37,383 76, Noah Snavely 15,464 37,383 76,389 Reproduced with permission of Yahoo! Inc by Yahoo! Inc. YAHOO! and the YAHOO! logo are trademarks of Yahoo! Inc.







2 Photo Tourism Photo Tourism overview Input photographs Scene reconstruction Relative camera positions and orientations Point cloud Sparse correspondence Photo Explorer Related work Image-based modeling Related work Image browsing Debevec, et al. SIGGRAPH 1996 Schaffalitzky and Zisserman ECCV 2002 Brown and Lowe 3DIM 2005 Image-based rendering Aspen Movie Map Lippman, et al., 1978 Photorealistic IBR: Levoy and Hanrahan, SIGGRAPH 1996 Gortler, et al, SIGGRAPH 1996 Seitz and Dyer, SIGGRAPH 1996 Aliaga, et al, SIGGRAPH 2001 and many others Toyama, et al, Int. Conf. Multimedia, 2003 McCurdy and Griswold Mobisys 2003 Sivic and Zisserman ICCV 2003
3 Photo Tourism overview Scene reconstruction Automatically estimate position, orientation, and focal length of cameras 3D positions of feature points Scene reconstruction Feature detection Input photographs Photo Explorer Pairwise feature matching Incremental structure from motion Correspondence estimation Feature detection Detect features using SIFT [Lowe, IJCV 2004] Feature detection Detect features using SIFT [Lowe, IJCV 2004]


4 Pairwise feature matching Match features between each pair of images Pairwise feature matching Refine matching using RANSAC [Fischler & Bolles 1987] to estimate fundamental matrices between pairs Feature detection Detect features using SIFT [Lowe, IJCV 2004] Feature detection Detect features using SIFT [Lowe, IJCV 2004]
5 Feature detection Detect features using SIFT [Lowe, IJCV 2004] Feature matching Match features between each pair of images Feature matching Refine matching using RANSAC [Fischler & Bolles 1987] to estimate fundamental matrices between pairs Correspondence estimation Link up pairwise matches to form connected components of matches across several images Image 1 Image 2 Image 3 Image 4
 p 5 p 6 p 7")

6 Structure from motion Incremental structure from motion p 1 p 4 p 3 p 2 minimize f(r,t,p) p 5 p 6 p 7 Camera 1 Camera 3 R 1,t 1 Camera 2 R 3,t 3 R 2,t 2 Incremental structure from motion Incremental structure from motion

7 Incremental structure from motion Incremental structure from motion Incremental structure from motion Reconstruction performance For photo sets from the Internet, 20% to 75% of the photos were registered Most unregistered photos belonged to different connected components Running time: < 1 hour for 80 photos > 1 week for 2600 photo






8 Photo Tourism overview Photo Explorer Input photographs Scene reconstruction Photo Explorer Demo Photo Tourism overview Input photographs Scene reconstruction Photo Explorer Navigation Rendering Annotations





9 Navigation controls Object-based based browsing Free-flight navigation Object-based browsing Relation-based browsing Overhead map Object-based based browsing Relation-based browsing Visibility Resolution Head-on view Find all similar images Find all details Find all zoom outs Zoom in Move left Move right Zoom out
10 Relation-based browsing Relation-based browsing is to the left of Image B is to the left of Image B is detail of is detail of Image A is a zoom out of Image C Image A is a zoom out of Image C Image D Image D Relation-based browsing Relation-based browsing Image A Image A Image B Image B
11 Relation-based browsing Relation-based browsing to the right of to the right of Image A Image B Image A Image B Image C Image C Relation-based browsing Relation-based browsing to the right of to the right of Image A Image B Image A Image B is detail of is detail of Image C Image C Image D Image D


12 Relation-based browsing Overhead map to the left of to the right of Image A Image B is zoom-out of is detail of is detail of is detail of is zoom-out of is zoom-out of Image C is detail of Image D Prague Old Town Square Prague Rome


13 Photo Tourism overview Rendering Input photographs Scene reconstruction Photo Explorer Navigation Rendering Annotations Rendering Rendering


14 Rendering transitions Rendering transitions Rendering transitions Rendering transitions Camera A Camera B


15 Photo Tourism overview Input photographs Scene reconstruction Photo Explorer Navigation Rendering Annotations Paris Rome Prague Annotations Annotations Reproduced with permission of Yahoo! Inc by Yahoo! Inc. YAHOO! and the YAHOO! logo are trademarks of Yahoo! Inc.





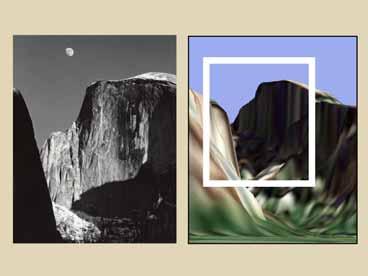
16 Annotations Paris Prague Yosemite Rome Yosemite Yosemite Topographic data courtesy USGS

 algorithms Plane-based transitions lack parallax Limitations / Future work Limitations / Future work Not all photos can be reliably matched")
17 Contributions Automated system for registering photo collections in 3D for interactive exploration Structure from motion algorithm demonstrated on hundreds of photos from the Internet Photo exploration system combining new imagebased rendering and photo navigation techniques Limitations / Future work Not all photos can be reliably matched Better feature detection / matching Integrating GPS & other localization info. Structure from motion scalability More efficient (sparse) algorithms Plane-based transitions lack parallax Limitations / Future work Limitations / Future work Not all photos can be reliably matched Better feature detection / matching Integrating GPS & other localization info. Structure from motion scalability More efficient (sparse) algorithms Plane-based transitions lack parallax Richer transitions Photo explorer scalability
 Future work Photo explorer scalability Scale to all of the world s photos (and videos ) Computational complexity: avoid matching all images to")
18 Future work Photosynth Photo explorer scalability Design client-server architecture for streaming images and geometry at required resolution Scale to all of the world s photos (and videos ) Photosynth project at Microsoft Live Labs (live demo) Future work Photo explorer scalability Scale to all of the world s photos (and videos ) Computational complexity: avoid matching all images to all other images vocabulary trees [Nister] graphical models, nested dissection [Dellaert] serendipitous (?) probabilistic inference Acknowledgements National Science Foundation Achievement Rewards for College Scientists (ARCS) The many people who allowed use of their photos UW GRAIL Lab MSR Interactive Visual Media Lab Kevin Chiu and Andy Hou for writing the Java applet




19 Conclusion Indexing the world s photos in 3D provides a new way to share and experience our world To find out more: Saint Basil's Cathedral Trafalgar Square Rockefeller Center Mount Rushmore Statistics Dataset # input # registered Trevi Fountain Yosemite 325 1,893 Notre Dame 597 2,635 Prague Reconstruction running time Great Wall: 82 / 120 photos registered Running time: ~ 3 hours Notre Dame: 597 / 2,635 photos registered Running time: ~ 2 weeks Great Wall Trafalgar Square 278 1,893
20 Future work Visibility Incorporate other metadata (e.g., time, photographer) and media (e.g., panoramas, video) Enhanced morphing Scale up structure from motion algorithm Visibility Advantages of 3D over 2D 3D geometry has multi-image consistency Can annotate point cloud directly Can import annotations from georeferenced sources (e.g., landmark databases) Can use depth as cue for rejecting outliers in selection
21 Post-processing the reconstruction Compute gravity direction Center point cloud at the origin Scale model to unit variance
Noah Snavely Steven M. Seitz. Richard Szeliski. University of Washington. Microsoft Research. Modified from authors slides
 Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Photo Tourism: Exploring Photo Collections in 3D Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Modified from authors slides
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Photo Tourism: Exploring Photo Collections in 3D
 Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Click! Click! Oooo!! Click! Zoom click! Click! Some other camera noise!! Photo Tourism: Exploring Photo Collections in 3D Click! Click! Ahhh! Click! Click! Overview of Research at Microsoft, 2007 Jeremy
Image correspondences and structure from motion
 Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
Image correspondences and structure from motion http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2017, Lecture 20 Course announcements Homework 5 posted.
The Light Field and Image-Based Rendering
 Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 11: The Light Field and Image-Based Rendering Visual Computing Systems Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So far in course: rendering = synthesizing an image from
Lecture 15: Image-Based Rendering and the Light Field. Kayvon Fatahalian CMU : Graphics and Imaging Architectures (Fall 2011)
") Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Lecture 15: Image-Based Rendering and the Light Field Kayvon Fatahalian CMU 15-869: Graphics and Imaging Architectures (Fall 2011) Demo (movie) Royal Palace: Madrid, Spain Image-based rendering (IBR) So
Sparse 3D Model Reconstruction from photographs
 Sparse 3D Model Reconstruction from photographs Kanchalai Suveepattananont ksuvee@seas.upenn.edu Professor Norm Badler badler@seas.upenn.edu Advisor Aline Normoyle alinen@seas.upenn.edu Abstract Nowaday,
Sparse 3D Model Reconstruction from photographs Kanchalai Suveepattananont ksuvee@seas.upenn.edu Professor Norm Badler badler@seas.upenn.edu Advisor Aline Normoyle alinen@seas.upenn.edu Abstract Nowaday,
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Region Graphs for Organizing Image Collections
 Region Graphs for Organizing Image Collections Alexander Ladikos 1, Edmond Boyer 2, Nassir Navab 1, and Slobodan Ilic 1 1 Chair for Computer Aided Medical Procedures, Technische Universität München 2 Perception
Region Graphs for Organizing Image Collections Alexander Ladikos 1, Edmond Boyer 2, Nassir Navab 1, and Slobodan Ilic 1 1 Chair for Computer Aided Medical Procedures, Technische Universität München 2 Perception
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
International Journal for Research in Applied Science & Engineering Technology (IJRASET) A Review: 3D Image Reconstruction From Multiple Images
 A Review: 3D Image Reconstruction From Multiple Images") A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
A Review: 3D Image Reconstruction From Multiple Images Rahul Dangwal 1, Dr. Sukhwinder Singh 2 1 (ME Student) Department of E.C.E PEC University of TechnologyChandigarh, India-160012 2 (Supervisor)Department
Hierarchical Photo Organization using Geo-Relevance
 Proceedings of the 15th International Symposium on Advances in Geographic Information Systems ACM GIS 2007 Hierarchical Photo Organization using Geo-Relevance Boris Epshtein Borisep@microsoft.com Eyal
Proceedings of the 15th International Symposium on Advances in Geographic Information Systems ACM GIS 2007 Hierarchical Photo Organization using Geo-Relevance Boris Epshtein Borisep@microsoft.com Eyal
Structure from Motion
 /8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
/8/ Structure from Motion Computer Vision CS 43, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from motion
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from Motion
 11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
11/18/11 Structure from Motion Computer Vision CS 143, Brown James Hays Many slides adapted from Derek Hoiem, Lana Lazebnik, Silvio Saverese, Steve Seitz, and Martial Hebert This class: structure from
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
A New Representation for Video Inspection. Fabio Viola
 A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
A New Representation for Video Inspection Fabio Viola Outline Brief introduction to the topic and definition of long term goal. Description of the proposed research project. Identification of a short term
CS231M Mobile Computer Vision Structure from motion
 CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
CS231M Mobile Computer Vision Structure from motion - Cameras - Epipolar geometry - Structure from motion Pinhole camera Pinhole perspective projection f o f = focal length o = center of the camera z y
Painting-to-3D Model Alignment Via Discriminative Visual Elements. Mathieu Aubry (INRIA) Bryan Russell (Intel) Josef Sivic (INRIA)
 Bryan Russell (Intel) Josef Sivic (INRIA)") Painting-to-3D Model Alignment Via Discriminative Visual Elements Mathieu Aubry (INRIA) Bryan Russell (Intel) Josef Sivic (INRIA) This work Browsing across time 1699 1740 1750 1800 1800 1699 1740 1750
Painting-to-3D Model Alignment Via Discriminative Visual Elements Mathieu Aubry (INRIA) Bryan Russell (Intel) Josef Sivic (INRIA) This work Browsing across time 1699 1740 1750 1800 1800 1699 1740 1750
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Image-Based Modeling and Rendering
 Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Traditional Computer Graphics Image-Based Modeling and Rendering Thomas Funkhouser Princeton University COS 426 Guest Lecture Spring 2003 How would you model and render this scene? (Jensen) How about this
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry
 3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry Bryan C. Russell et al. SIGGRAPH Asia 2013 Presented by YoungBin Kim 2014. 01. 10 Abstract Produce annotated 3D
3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry Bryan C. Russell et al. SIGGRAPH Asia 2013 Presented by YoungBin Kim 2014. 01. 10 Abstract Produce annotated 3D
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-based rendering using plane-sweeping modelisation
 Author manuscript, published in "IAPR Machine Vision and Applications MVA2005, Japan (2005)" Image-based rendering using plane-sweeping modelisation Vincent Nozick, Sylvain Michelin and Didier Arquès Marne
Author manuscript, published in "IAPR Machine Vision and Applications MVA2005, Japan (2005)" Image-based rendering using plane-sweeping modelisation Vincent Nozick, Sylvain Michelin and Didier Arquès Marne
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Efficient and Rich Annotations for Large Photo Collections
 Efficient and Rich Annotations for Large Photo Collections Jayaguru Panda jayaguru.panda@research.iiit.ac.in IIIT Hyderabad, India C V Jawahar jawahar@iiit.ac.in IIIT Hyderabad, India Abstract Large unstructured
Efficient and Rich Annotations for Large Photo Collections Jayaguru Panda jayaguru.panda@research.iiit.ac.in IIIT Hyderabad, India C V Jawahar jawahar@iiit.ac.in IIIT Hyderabad, India Abstract Large unstructured
Advanced Digital Photography and Geometry Capture. Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015
 Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
Advanced Digital Photography and Geometry Capture Visual Imaging in the Electronic Age Lecture #10 Donald P. Greenberg September 24, 2015 Eye of a Fly AWARE-2 Duke University http://www.nanowerk.com/spotlight/spotid=3744.php
EE 6882 Visual Search Engine
 3/9/22 EE 6882 Visual Search Engine Prof. Shih Fu Chang, March 9, 22 Lecture #8 Mid Term Project Presentation Structure from Motion: Photo Synth/Tourism Course Project 3/26 mid term presentation slides
3/9/22 EE 6882 Visual Search Engine Prof. Shih Fu Chang, March 9, 22 Lecture #8 Mid Term Project Presentation Structure from Motion: Photo Synth/Tourism Course Project 3/26 mid term presentation slides
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
C280, Computer Vision
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 11: Structure from Motion Roadmap Previous: Image formation, filtering, local features, (Texture) Tues: Feature-based Alignment
Improving Initial Estimations for Structure from Motion Methods
 Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Improving Initial Estimations for Structure from Motion Methods University of Bonn Outline Motivation Computer-Vision Basics Stereo Vision Bundle Adjustment Feature Matching Global Initial Estimation Component
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Computational Photography
 End of Semester is the last lecture of new material Quiz on Friday 4/30 Sample problems are posted on website Computational Photography Final Project Presentations Wednesday May 12 1-5pm, CII 4040 Attendance
End of Semester is the last lecture of new material Quiz on Friday 4/30 Sample problems are posted on website Computational Photography Final Project Presentations Wednesday May 12 1-5pm, CII 4040 Attendance
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Presentation Outline 1 2 3 Sample Problem
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry
 CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
CS664 Lecture #19: Layers, RANSAC, panoramas, epipolar geometry Some material taken from: David Lowe, UBC Jiri Matas, CMP Prague http://cmp.felk.cvut.cz/~matas/papers/presentations/matas_beyondransac_cvprac05.ppt
Geometry for Computer Vision
 Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Geometry for Computer Vision Lecture 5b Calibrated Multi View Geometry Per-Erik Forssén 1 Overview The 5-point Algorithm Structure from Motion Bundle Adjustment 2 Planar degeneracy In the uncalibrated
Image stitching. Digital Visual Effects Yung-Yu Chuang. with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac
 Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Image stitching Digital Visual Effects Yung-Yu Chuang with slides by Richard Szeliski, Steve Seitz, Matthew Brown and Vaclav Hlavac Image stitching Stitching = alignment + blending geometrical registration
Structure from Motion
 Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
Structure from Motion Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz, N Snavely, and D. Hoiem Administrative stuffs HW 3 due 11:55 PM, Oct 17 (Wed) Submit your alignment results!
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Last lecture. Passive Stereo Spacetime Stereo
 Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Last lecture Passive Stereo Spacetime Stereo Today Structure from Motion: Given pixel correspondences, how to compute 3D structure and camera motion? Slides stolen from Prof Yungyu Chuang Epipolar geometry
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Epipolar Geometry CSE P576. Dr. Matthew Brown
 Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
Epipolar Geometry CSE P576 Dr. Matthew Brown Epipolar Geometry Epipolar Lines, Plane Constraint Fundamental Matrix, Linear solution + RANSAC Applications: Structure from Motion, Stereo [ Szeliski 11] 2
CS 4758: Automated Semantic Mapping of Environment
 CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
CS 4758: Automated Semantic Mapping of Environment Dongsu Lee, ECE, M.Eng., dl624@cornell.edu Aperahama Parangi, CS, 2013, alp75@cornell.edu Abstract The purpose of this project is to program an Erratic
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Structure from Motion
 04/4/ Structure from Motion Comuter Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adated from Lana Lazebnik, Silvio Saverese, Steve Seitz his class: structure from motion Reca
04/4/ Structure from Motion Comuter Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Many slides adated from Lana Lazebnik, Silvio Saverese, Steve Seitz his class: structure from motion Reca
Image-based Modeling and Rendering: 8. Image Transformation and Panorama
 Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Image-based Modeling and Rendering: 8. Image Transformation and Panorama I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung Univ, Taiwan Outline Image transformation How to represent the
Structure from Motion. Introduction to Computer Vision CSE 152 Lecture 10
 Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
Structure from Motion CSE 152 Lecture 10 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 8: Structure from Motion Optional: Multiple View Geometry in Computer Vision, 2nd edition, Hartley
EECS 442 Computer vision. 3D Object Recognition and. Scene Understanding
 EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments
 Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Morphable 3D-Mosaics: a Hybrid Framework for Photorealistic Walkthroughs of Large Natural Environments Nikos Komodakis and Georgios Tziritas Computer Science Department, University of Crete E-mails: {komod,
Image-Based Rendering
 Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Image-Based Rendering COS 526, Fall 2016 Thomas Funkhouser Acknowledgments: Dan Aliaga, Marc Levoy, Szymon Rusinkiewicz What is Image-Based Rendering? Definition 1: the use of photographic imagery to overcome
Computational Photography: Advanced Topics. Paul Debevec
 Computational Photography: Advanced Topics Paul Debevec Class: Computational Photography, Advanced Topics Module 1: 105 minutes Debevec,, Raskar and Tumblin 1:45: A.1 Introduction and Overview (Raskar,
Computational Photography: Advanced Topics Paul Debevec Class: Computational Photography, Advanced Topics Module 1: 105 minutes Debevec,, Raskar and Tumblin 1:45: A.1 Introduction and Overview (Raskar,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection
 3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
Augmenting Reality, Naturally:
 Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Augmenting Reality, Naturally: Scene Modelling, Recognition and Tracking with Invariant Image Features by Iryna Gordon in collaboration with David G. Lowe Laboratory for Computational Intelligence Department
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 8.2 Structure from Motion. Thomas Opsahl
 Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Lecture 8.2 Structure from Motion Thomas Opsahl More-than-two-view geometry Correspondences (matching) More views enables us to reveal and remove more mismatches than we can do in the two-view case More
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images
 Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
Real-time Generation and Presentation of View-dependent Binocular Stereo Images Using a Sequence of Omnidirectional Images Abstract This paper presents a new method to generate and present arbitrarily
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/91/106305353.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Extrinsic camera calibration method and its performance evaluation Jacek Komorowski 1 and Przemyslaw Rokita 2 arxiv:1809.11073v1 [cs.cv] 28 Sep 2018 1 Maria Curie Sklodowska University Lublin, Poland jacek.komorowski@gmail.com
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Perception. Autonomous Mobile Robots. Sensors Vision Uncertainties, Line extraction from laser scans. Autonomous Systems Lab. Zürich.
 Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Autonomous Mobile Robots Localization "Position" Global Map Cognition Environment Model Local Map Path Perception Real World Environment Motion Control Perception Sensors Vision Uncertainties, Line extraction
Applications of Image-Based Modeling and Rendering in Art and Cinema
 Applications of Image-Based Modeling and Rendering in Art and Cinema Paul Debevec Overview Image-based techniques are used in many ways; for each we can ask: What is the model? How are images used? What
Applications of Image-Based Modeling and Rendering in Art and Cinema Paul Debevec Overview Image-based techniques are used in many ways; for each we can ask: What is the model? How are images used? What
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
3D Reconstruction on GPU: A Parallel Processing Approach
 3D Reconstruction on GPU: A Parallel Processing Approach Shubham Gupta, Siddharth Choudhary, and P.J. Narayanan Center for Visual Information Technology International Institute of Information Technology
3D Reconstruction on GPU: A Parallel Processing Approach Shubham Gupta, Siddharth Choudhary, and P.J. Narayanan Center for Visual Information Technology International Institute of Information Technology
Generalized Detection and Merging of Loop Closures for Video Sequences
 Generalized Detection and Merging of Loop Closures for Video Sequences Manfred Klopschitz 1, Christopher Zach 2, Arnold Irschara 1, Dieter Schmalstieg 1 1 Graz University of Technology {klopschitz,irschara,schmalstieg}@icg.tugraz.at
Generalized Detection and Merging of Loop Closures for Video Sequences Manfred Klopschitz 1, Christopher Zach 2, Arnold Irschara 1, Dieter Schmalstieg 1 1 Graz University of Technology {klopschitz,irschara,schmalstieg}@icg.tugraz.at
In-Situ 3D Indoor Modeler with a Camera and Self-Contained Sensors
 In-Situ 3D Indoor Modeler with a Camera and Self-Contained Sensors Tomoya Ishikawa 1, Kalaivani Thangamani 12, Masakatsu Kourogi 1, Andrew P. Gee 3, Walterio Mayol-Cuevas 3, Keechul Jung 4 and Takeshi
In-Situ 3D Indoor Modeler with a Camera and Self-Contained Sensors Tomoya Ishikawa 1, Kalaivani Thangamani 12, Masakatsu Kourogi 1, Andrew P. Gee 3, Walterio Mayol-Cuevas 3, Keechul Jung 4 and Takeshi
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs
 Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Computer Vision for Computer Graphics
 Computer Vision for Computer Graphics Mark Borg Computer Vision & Computer Graphics I Computer Vision Understanding the content of an image (normaly by creating a model of the observed scene) Computer
Computer Vision for Computer Graphics Mark Borg Computer Vision & Computer Graphics I Computer Vision Understanding the content of an image (normaly by creating a model of the observed scene) Computer
Reconstructing the World* in Six Days *(As Captured by the Yahoo 100 Million Image Dataset)
") Reconstructing the World* in Six Days *(As Captured by the Yahoo 100 Million Image Dataset) Jared Heinly, Johannes L. Schönberger, Enrique Dunn, Jan-Michael Frahm Department of Computer Science, The University
Reconstructing the World* in Six Days *(As Captured by the Yahoo 100 Million Image Dataset) Jared Heinly, Johannes L. Schönberger, Enrique Dunn, Jan-Michael Frahm Department of Computer Science, The University
Srikumar Ramalingam. Review. 3D Reconstruction. Pose Estimation Revisited. School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
School of Computing University of Utah Presentation Outline 1 2 3 Forward Projection (Reminder) u v 1 KR ( I t ) X m Y m Z m 1 Backward Projection (Reminder) Q K 1 q Q K 1 u v 1 What is pose estimation?
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Network Principles for SfM: Disambiguating Repeated Structures with Local Context
 2013 IEEE International Conference on Computer Vision Network Principles for SfM: Disambiguating Repeated Structures with Local Context Kyle Wilson Noah Snavely Cornell University {klw229,snavely}@cornell.edu
2013 IEEE International Conference on Computer Vision Network Principles for SfM: Disambiguating Repeated Structures with Local Context Kyle Wilson Noah Snavely Cornell University {klw229,snavely}@cornell.edu
Layered Depth Panoramas
 Layered Depth Panoramas Ke Colin Zheng 1, Sing Bing Kang 2 Michael F. Cohen 2, Richard Szeliski 2 1 University of Washington, Seattle, WA 2 Microsoft Research, Redmond, WA Abstract Representations for
Layered Depth Panoramas Ke Colin Zheng 1, Sing Bing Kang 2 Michael F. Cohen 2, Richard Szeliski 2 1 University of Washington, Seattle, WA 2 Microsoft Research, Redmond, WA Abstract Representations for
Building Rome in a Day
 Building Rome in a Day Sameer Agarwal 1, Noah Snavely 2 Ian Simon 1 Steven M. Seitz 1 Richard Szeliski 3 1 University of Washington 2 Cornell University 3 Microsoft Research Abstract We present a system
Building Rome in a Day Sameer Agarwal 1, Noah Snavely 2 Ian Simon 1 Steven M. Seitz 1 Richard Szeliski 3 1 University of Washington 2 Cornell University 3 Microsoft Research Abstract We present a system
Structure from Motion and Multi- view Geometry. Last lecture
 Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,
Structure from Motion and Multi- view Geometry Topics in Image-Based Modeling and Rendering CSE291 J00 Lecture 5 Last lecture S. J. Gortler, R. Grzeszczuk, R. Szeliski,M. F. Cohen The Lumigraph, SIGGRAPH,