Detecting and Tracking Moving Objects for Video Surveillance. Isaac Cohen and Gerard Medioni University of Southern California
|
|
|
- Augustus Morris
- 5 years ago
- Views:
Transcription
1 Detecting and Tracking Moving Objects for Video Surveillance Isaac Cohen and Gerard Medioni University of Southern California
2 Their application sounds familiar. Video surveillance Sensors with pan-tilt and zoom Sensors mounted on moving airborne platforms Requirement for detection and tracking of moving objects and the relationship of their trajectories Requirement for high-level description of the whole video sequence
3 Approach First find optical flow and perform motion compensation to stabilize. Find large numbers of moving regions. Use the residual flow field and its normal component to detect errors. Define a attributed graph whose nodes are detected regions and edges are possible matches between two regions detected in two different frames. Use the graph as a dynamic template for tracking moving objects.
4 Their Idea Detection after stabilization doesn t work well. So integrate the detection into the stabilization algorithm by locating regions of the image where a residual motion occurs using the normal component of the optical flow field.
5 What is Normal Flow? The optical flow equation constrains the image velocity in the direction of the local image gradient, but not the tangential velocity. Normal flow corresponds to the image velocity along the image gradient. It is computed from both image gradients and temporal gradients of the stabilized sequence. The amplitude is large near moving regions. The amplitude is near zero near stationary regions.
6 Computation of Normal Flow Let τ ij denote the warping of image to reference frame j. The stabilized image sequence is defined by I i (τ ij ). Given reference image I 0 and target I 1, image stabilization consists of registering the two images and computing the geometric transform τ that warps I 1 so it aligns with I 0.
7 Parameter Estimation of the Geometric Transform Minimize the least squares equation Detect and remove outliers through an iterative process.
8 Definition of Normal Flow The warping function is integrated into the formula so that the image gradients are computed on the original image grids and not the warped ones. This simplifies the computation and allows for a more accurate estimation of the residual normal flow.
9 Finding Moving Objects Given a pair of image frames, find the moving objects by thresholding the normal flow. Does this overcome problems of other approaches?
10 Graph Representation of Moving Objects Nodes are the moving regions. Edges are the relationships between 2 moving regions detected in 2 separate frames. Each new frame generates a set of regions corresponding to the moving objects. We want to know which moving objects in the new frame are the same as those in the old.
11 Why is this Difficult? Little information about the objects is known. Objects tend to be of small size in aerial imagery. Large changes in object size are possible.

12 Sample Detection
13 Detection Videos seq1.avi seq1_det.avi seq6.avi seq6_det.avi
14 Example Graph: What s going on?
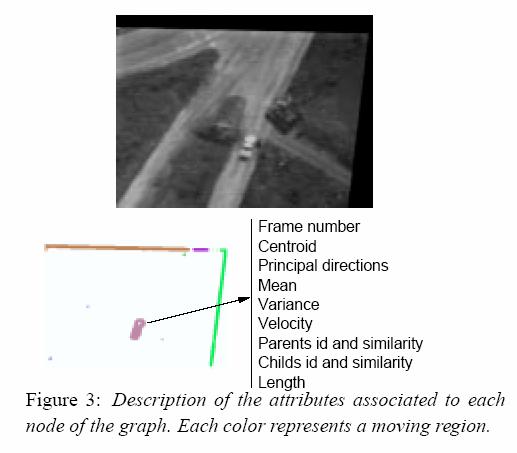
15 Attributes of a Node
16 Keeping Track of Moving Regions Among the detected regions, some small ones should be merged into a larger one. They cluster the detected regions in the graph, instead of using single images. Use a median shape template to keep track of the different moving regions.
17 Moving objects that don t appear in some frames can be hypothesized. hypothesized
18 Extraction of Object Trajectories The graph representation changes as new frames are acquired and processed. The goal is to find the full trajectory of each moving object. But we don t know where each one starts or where it ends. So we have to consider each node with no predecessor a possible start and each with no successor a possible end.
19 Optimal Path Assign each edge of the graph a cost, which is the similarity between the connected nodes. i c ij = C ij / (1 + d ij2 ) j C ij is the gray-level and shape correlation between i and j. d ij is the distance between their centroids.
20 Optimal Path This formulation does not lead to the optimal solution. Instead they define the length l j of node j as the maximal length of the path starting at that node. Then the modified cost function C ij =l j c ij is used to find the optimal paths from each node without predecessor, using a greedy search method.
21 Quantitative Evaluation TP = true positives of moving objects FP = false positives of moving objects FN = false negatives (not detected) Metrics: DR = TP / (TP + FN) Detection Ratio FAR = FP / (TP + FP) False Alarm Ratio

22 Evaluation Results on 5 Shots
23 Tracking Demos seq1_mos_track.avi seq6_track.avi
24 Questions/Comments Have they solved our problem? Has anyone done better? No one seems to use the metrics. But a 2005 paper by Nicolescu and Medioni compares results of 4 methods on fake sequences (and beats them, of course) Another recent paper by Xiao and Shah says they compared their results to those of Ke and Kanade, Wang and Adelson, and Ayer and Sawhney, but no numbers are given. Can we beat these people?
Event Detection and Analysis from Video Streams
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 23, NO. 8, AUGUST 2001 873 Event Detection and Analysis from Video Streams Ge rard Medioni, Senior Member, IEEE, Isaac Cohen, Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 23, NO. 8, AUGUST 2001 873 Event Detection and Analysis from Video Streams Ge rard Medioni, Senior Member, IEEE, Isaac Cohen, Member,
Representing Moving Images with Layers. J. Y. Wang and E. H. Adelson MIT Media Lab
 Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Representing Moving Images with Layers J. Y. Wang and E. H. Adelson MIT Media Lab Goal Represent moving images with sets of overlapping layers Layers are ordered in depth and occlude each other Velocity
Motion Tracking and Event Understanding in Video Sequences
 Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Motion Tracking and Event Understanding in Video Sequences Isaac Cohen Elaine Kang, Jinman Kang Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA Objectives!
Outline. Data Association Scenarios. Data Association Scenarios. Data Association Scenarios
 Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Outline Data Association Scenarios Track Filtering and Gating Global Nearest Neighbor (GNN) Review: Linear Assignment Problem Murthy s k-best Assignments Algorithm Probabilistic Data Association (PDAF)
Dense Image-based Motion Estimation Algorithms & Optical Flow
 Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Dense mage-based Motion Estimation Algorithms & Optical Flow Video A video is a sequence of frames captured at different times The video data is a function of v time (t) v space (x,y) ntroduction to motion
Global Flow Estimation. Lecture 9
 Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
Motion Models Image Transformations to relate two images 3D Rigid motion Perspective & Orthographic Transformation Planar Scene Assumption Transformations Translation Rotation Rigid Affine Homography Pseudo
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences
 Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences Yuping Lin and Gérard Medioni Computer Science Department, University of Southern California 941 W. 37th Place,
Map-Enhanced UAV Image Sequence Registration and Synchronization of Multiple Image Sequences Yuping Lin and Gérard Medioni Computer Science Department, University of Southern California 941 W. 37th Place,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 11 140311 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Motion Analysis Motivation Differential Motion Optical
Motion and Target Tracking (Overview) Suya You. Integrated Media Systems Center Computer Science Department University of Southern California
 Suya You. Integrated Media Systems Center Computer Science Department University of Southern California") Motion and Target Tracking (Overview) Suya You Integrated Media Systems Center Computer Science Department University of Southern California 1 Applications - Video Surveillance Commercial - Personals/Publics
Motion and Target Tracking (Overview) Suya You Integrated Media Systems Center Computer Science Department University of Southern California 1 Applications - Video Surveillance Commercial - Personals/Publics
Optical Flow-Based Motion Estimation. Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides.
 Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
Optical Flow-Based Motion Estimation Thanks to Steve Seitz, Simon Baker, Takeo Kanade, and anyone else who helped develop these slides. 1 Why estimate motion? We live in a 4-D world Wide applications Object
2 Algorithm Description Active contours are initialized using the output of the SUSAN edge detector [10]. Edge runs that contain a reasonable number (
![2 Algorithm Description Active contours are initialized using the output of the SUSAN edge detector [10]. Edge runs that contain a reasonable number (](/thumbs/93/112190940.jpg "2 Algorithm Description Active contours are initialized using the output of the SUSAN edge detector [10]. Edge runs that contain a reasonable number (") Motion-Based Object Segmentation Using Active Contours Ben Galvin, Kevin Novins, and Brendan McCane Computer Science Department, University of Otago, Dunedin, New Zealand. Abstract: The segmentation of
Motion-Based Object Segmentation Using Active Contours Ben Galvin, Kevin Novins, and Brendan McCane Computer Science Department, University of Otago, Dunedin, New Zealand. Abstract: The segmentation of
Mixture Models and EM
 Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Mixture Models and EM Goal: Introduction to probabilistic mixture models and the expectationmaximization (EM) algorithm. Motivation: simultaneous fitting of multiple model instances unsupervised clustering
Vehicle and Person Tracking in UAV Videos
 Vehicle and Person Tracking in UAV Videos Jiangjian Xiao, Changjiang Yang, Feng Han, and Hui Cheng Sarnoff Corporation {jxiao, cyang, fhan, hcheng}@sarnoff.com Abstract. This paper presents two tracking
Vehicle and Person Tracking in UAV Videos Jiangjian Xiao, Changjiang Yang, Feng Han, and Hui Cheng Sarnoff Corporation {jxiao, cyang, fhan, hcheng}@sarnoff.com Abstract. This paper presents two tracking
Global Flow Estimation. Lecture 9
 Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
Global Flow Estimation Lecture 9 Global Motion Estimate motion using all pixels in the image. Parametric flow gives an equation, which describes optical flow for each pixel. Affine Projective Global motion
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Motion in 2D image sequences
 Motion in 2D image sequences Definitely used in human vision Object detection and tracking Navigation and obstacle avoidance Analysis of actions or activities Segmentation and understanding of video sequences
Motion in 2D image sequences Definitely used in human vision Object detection and tracking Navigation and obstacle avoidance Analysis of actions or activities Segmentation and understanding of video sequences
Lecture 28 Intro to Tracking
 Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Lecture 28 Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 Recall: Blob Merge/Split merge occlusion occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28
 Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Recall: Blob Merge/Split Lecture 28 merge occlusion Intro to Tracking Some overlap with T&V Section 8.4.2 and Appendix A.8 occlusion split When two objects pass close to each other, they are detected as
Marcel Worring Intelligent Sensory Information Systems
 Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Marcel Worring worring@science.uva.nl Intelligent Sensory Information Systems University of Amsterdam Information and Communication Technology archives of documentaries, film, or training material, video
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
VEHICLE QUEUE DETECTION IN SATELLITE IMAGES OF URBAN AREAS
 VEHICLE QUEUE DETECTION IN SATELLITE IMAGES OF URBAN AREAS J. Leitloff 1, S. Hinz 2, U. Stilla 1 1 Photogrammetry and Remote Sensing, 2 Remote Sensing Technology Technische Universitaet Muenchen, Arcisstrasse
VEHICLE QUEUE DETECTION IN SATELLITE IMAGES OF URBAN AREAS J. Leitloff 1, S. Hinz 2, U. Stilla 1 1 Photogrammetry and Remote Sensing, 2 Remote Sensing Technology Technische Universitaet Muenchen, Arcisstrasse
Accurate 3D Face and Body Modeling from a Single Fixed Kinect
 Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Accurate 3D Face and Body Modeling from a Single Fixed Kinect Ruizhe Wang*, Matthias Hernandez*, Jongmoo Choi, Gérard Medioni Computer Vision Lab, IRIS University of Southern California Abstract In this
Classification of Subject Motion for Improved Reconstruction of Dynamic Magnetic Resonance Imaging
 1 CS 9 Final Project Classification of Subject Motion for Improved Reconstruction of Dynamic Magnetic Resonance Imaging Feiyu Chen Department of Electrical Engineering ABSTRACT Subject motion is a significant
1 CS 9 Final Project Classification of Subject Motion for Improved Reconstruction of Dynamic Magnetic Resonance Imaging Feiyu Chen Department of Electrical Engineering ABSTRACT Subject motion is a significant
Efficient Acquisition of Human Existence Priors from Motion Trajectories
 Efficient Acquisition of Human Existence Priors from Motion Trajectories Hitoshi Habe Hidehito Nakagawa Masatsugu Kidode Graduate School of Information Science, Nara Institute of Science and Technology
Efficient Acquisition of Human Existence Priors from Motion Trajectories Hitoshi Habe Hidehito Nakagawa Masatsugu Kidode Graduate School of Information Science, Nara Institute of Science and Technology
Performance study on point target detection using super-resolution reconstruction
 Performance study on point target detection using super-resolution reconstruction Judith Dijk a,adamw.m.vaneekeren ab, Klamer Schutte a Dirk-Jan J. de Lange a, Lucas J. van Vliet b a Electro Optics Group
Performance study on point target detection using super-resolution reconstruction Judith Dijk a,adamw.m.vaneekeren ab, Klamer Schutte a Dirk-Jan J. de Lange a, Lucas J. van Vliet b a Electro Optics Group
University of Florida CISE department Gator Engineering. Clustering Part 2
 Clustering Part 2 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville Partitional Clustering Original Points A Partitional Clustering Hierarchical
Clustering Part 2 Dr. Sanjay Ranka Professor Computer and Information Science and Engineering University of Florida, Gainesville Partitional Clustering Original Points A Partitional Clustering Hierarchical
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling
 Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
Aircraft Tracking Based on KLT Feature Tracker and Image Modeling Khawar Ali, Shoab A. Khan, and Usman Akram Computer Engineering Department, College of Electrical & Mechanical Engineering, National University
Motion. 1 Introduction. 2 Optical Flow. Sohaib A Khan. 2.1 Brightness Constancy Equation
 Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Motion Sohaib A Khan 1 Introduction So far, we have dealing with single images of a static scene taken by a fixed camera. Here we will deal with sequence of images taken at different time intervals. Motion
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition. Motion Tracking. CS4243 Motion Tracking 1
 Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
Leow Wee Kheng CS4243 Computer Vision and Pattern Recognition Motion Tracking CS4243 Motion Tracking 1 Changes are everywhere! CS4243 Motion Tracking 2 Illumination change CS4243 Motion Tracking 3 Shape
CSE 527: Introduction to Computer Vision
 CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
CSE 527: Introduction to Computer Vision Week 5 - Class 1: Matching, Stitching, Registration September 26th, 2017 ??? Recap Today Feature Matching Image Alignment Panoramas HW2! Feature Matches Feature
Multimedia Systems Video II (Video Coding) Mahdi Amiri April 2012 Sharif University of Technology
 Mahdi Amiri April 2012 Sharif University of Technology") Course Presentation Multimedia Systems Video II (Video Coding) Mahdi Amiri April 2012 Sharif University of Technology Video Coding Correlation in Video Sequence Spatial correlation Similar pixels seem
Course Presentation Multimedia Systems Video II (Video Coding) Mahdi Amiri April 2012 Sharif University of Technology Video Coding Correlation in Video Sequence Spatial correlation Similar pixels seem
Nonrigid Surface Modelling. and Fast Recovery. Department of Computer Science and Engineering. Committee: Prof. Leo J. Jia and Prof. K. H.
 Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Nonrigid Surface Modelling and Fast Recovery Zhu Jianke Supervisor: Prof. Michael R. Lyu Committee: Prof. Leo J. Jia and Prof. K. H. Wong Department of Computer Science and Engineering May 11, 2007 1 2
Visual Tracking (1) Feature Point Tracking and Block Matching
 Feature Point Tracking and Block Matching") Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Intelligent Control Systems Visual Tracking (1) Feature Point Tracking and Block Matching Shingo Kagami Graduate School of Information Sciences, Tohoku University swk(at)ic.is.tohoku.ac.jp http://www.ic.is.tohoku.ac.jp/ja/swk/
Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation
 ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
ÖGAI Journal 24/1 11 Colour Segmentation-based Computation of Dense Optical Flow with Application to Video Object Segmentation Michael Bleyer, Margrit Gelautz, Christoph Rhemann Vienna University of Technology
Motion-based obstacle detection and tracking for car driving assistance
 Motion-based obstacle detection and tracking for car driving assistance G. Lefaix, E. Marchand, Patrick Bouthemy To cite this version: G. Lefaix, E. Marchand, Patrick Bouthemy. Motion-based obstacle detection
Motion-based obstacle detection and tracking for car driving assistance G. Lefaix, E. Marchand, Patrick Bouthemy To cite this version: G. Lefaix, E. Marchand, Patrick Bouthemy. Motion-based obstacle detection
16720 Computer Vision: Homework 3 Template Tracking and Layered Motion.
 16720 Computer Vision: Homework 3 Template Tracking and Layered Motion. Instructor: Martial Hebert TAs: Varun Ramakrishna and Tomas Simon Due Date: October 24 th, 2011. 1 Instructions You should submit
16720 Computer Vision: Homework 3 Template Tracking and Layered Motion. Instructor: Martial Hebert TAs: Varun Ramakrishna and Tomas Simon Due Date: October 24 th, 2011. 1 Instructions You should submit
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
BCC Optical Stabilizer Filter
 BCC Optical Stabilizer Filter The Optical Stabilizer filter allows you to stabilize shaky video footage. The Optical Stabilizer uses optical flow technology to analyze a specified region and then adjusts
BCC Optical Stabilizer Filter The Optical Stabilizer filter allows you to stabilize shaky video footage. The Optical Stabilizer uses optical flow technology to analyze a specified region and then adjusts
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Continuous Multi-Views Tracking using Tensor Voting
 Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Continuous Multi-Views racking using ensor Voting Jinman Kang, Isaac Cohen and Gerard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles, CA 90089-073.
Bus Detection and recognition for visually impaired people
 Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
Bus Detection and recognition for visually impaired people Hangrong Pan, Chucai Yi, and Yingli Tian The City College of New York The Graduate Center The City University of New York MAP4VIP Outline Motivation
CS 664 Structure and Motion. Daniel Huttenlocher
 CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS 664 Structure and Motion Daniel Huttenlocher Determining 3D Structure Consider set of 3D points X j seen by set of cameras with projection matrices P i Given only image coordinates x ij of each point
CS664 Lecture #18: Motion
 CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CS664 Lecture #18: Motion Announcements Most paper choices were fine Please be sure to email me for approval, if you haven t already This is intended to help you, especially with the final project Use
CHAPTER 5 MOTION DETECTION AND ANALYSIS
 CHAPTER 5 MOTION DETECTION AND ANALYSIS 5.1. Introduction: Motion processing is gaining an intense attention from the researchers with the progress in motion studies and processing competence. A series
CHAPTER 5 MOTION DETECTION AND ANALYSIS 5.1. Introduction: Motion processing is gaining an intense attention from the researchers with the progress in motion studies and processing competence. A series
CS-465 Computer Vision
 CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
CS-465 Computer Vision Nazar Khan PUCIT 9. Optic Flow Optic Flow Nazar Khan Computer Vision 2 / 25 Optic Flow Nazar Khan Computer Vision 3 / 25 Optic Flow Where does pixel (x, y) in frame z move to in
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Hierarchical Clustering 4/5/17
 Hierarchical Clustering 4/5/17 Hypothesis Space Continuous inputs Output is a binary tree with data points as leaves. Useful for explaining the training data. Not useful for making new predictions. Direction
Hierarchical Clustering 4/5/17 Hypothesis Space Continuous inputs Output is a binary tree with data points as leaves. Useful for explaining the training data. Not useful for making new predictions. Direction
Clustering. Informal goal. General types of clustering. Applications: Clustering in information search and analysis. Example applications in search
 Informal goal Clustering Given set of objects and measure of similarity between them, group similar objects together What mean by similar? What is good grouping? Computation time / quality tradeoff 1 2
Informal goal Clustering Given set of objects and measure of similarity between them, group similar objects together What mean by similar? What is good grouping? Computation time / quality tradeoff 1 2
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
CV: 3D to 2D mathematics. Perspective transformation; camera calibration; stereo computation; and more
 CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
CV: 3D to 2D mathematics Perspective transformation; camera calibration; stereo computation; and more Roadmap of topics n Review perspective transformation n Camera calibration n Stereo methods n Structured
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 7.1: 2D Motion Estimation in Images Jürgen Sturm Technische Universität München 3D to 2D Perspective Projections
Journal of Industrial Engineering Research
 IWNEST PUBLISHER Journal of Industrial Engineering Research (ISSN: 2077-4559) Journal home page: http://www.iwnest.com/aace/ Mammogram Image Segmentation Using voronoi Diagram Properties Dr. J. Subash
IWNEST PUBLISHER Journal of Industrial Engineering Research (ISSN: 2077-4559) Journal home page: http://www.iwnest.com/aace/ Mammogram Image Segmentation Using voronoi Diagram Properties Dr. J. Subash
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation. Selim Aksoy. Bilkent University
 Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Image Segmentation Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Examples of grouping in vision [http://poseidon.csd.auth.gr/lab_research/latest/imgs/s peakdepvidindex_img2.jpg]
Displacement estimation
 Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Displacement estimation Displacement estimation by block matching" l Search strategies" l Subpixel estimation" Gradient-based displacement estimation ( optical flow )" l Lukas-Kanade" l Multi-scale coarse-to-fine"
Using 3D Scene Structure to Improve Tracking
 Using 3D Scene Structure to Improve Tracking Jan Prokaj and Gérard Medioni University of Southern California Los Angeles, CA 90089 {prokaj medioni}@usc.edu Abstract In this work we consider the problem
Using 3D Scene Structure to Improve Tracking Jan Prokaj and Gérard Medioni University of Southern California Los Angeles, CA 90089 {prokaj medioni}@usc.edu Abstract In this work we consider the problem
Flexible Visual Inspection. IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO
 Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Flexible Visual Inspection IAS-13 Industrial Forum Horizon 2020 Dr. Eng. Stefano Tonello - CEO IT+Robotics Spin-off of University of Padua founded in 2005 Strong relationship with IAS-LAB (Intelligent
Two-Frames Accurate Motion Segmentation Using Tensor Voting and Graph-Cuts
 Two-Frames Accurate Motion Segmentation Using Tensor Voting and Graph-Cuts Thang Dinh * and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles,
Two-Frames Accurate Motion Segmentation Using Tensor Voting and Graph-Cuts Thang Dinh * and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California Los Angeles,
Traffic Surveillance using Aerial Video
 Traffic Surveillance using Aerial Video UGP Project III (EE491) Report By Anurag Prabhakar(11140) Ritesh Kumar(11602) Under the guidance of Dr. K. S. Venkatesh Professor Department of Electrical Engineering
Traffic Surveillance using Aerial Video UGP Project III (EE491) Report By Anurag Prabhakar(11140) Ritesh Kumar(11602) Under the guidance of Dr. K. S. Venkatesh Professor Department of Electrical Engineering
Detection of Moving Objects in Colour based and Graph s axis Change method
 Detection of Moving Objects in Colour based and Graph s axis Change method Gagandeep Kaur1 Student of Master of Technology, Department of Computer Engineering, YCOE, GuruKashi Campus, Punjabi university,
Detection of Moving Objects in Colour based and Graph s axis Change method Gagandeep Kaur1 Student of Master of Technology, Department of Computer Engineering, YCOE, GuruKashi Campus, Punjabi university,
Matching. Compare region of image to region of image. Today, simplest kind of matching. Intensities similar.
 Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
Matching Compare region of image to region of image. We talked about this for stereo. Important for motion. Epipolar constraint unknown. But motion small. Recognition Find object in image. Recognize object.
CSE 158. Web Mining and Recommender Systems. Midterm recap
 CSE 158 Web Mining and Recommender Systems Midterm recap Midterm on Wednesday! 5:10 pm 6:10 pm Closed book but I ll provide a similar level of basic info as in the last page of previous midterms CSE 158
CSE 158 Web Mining and Recommender Systems Midterm recap Midterm on Wednesday! 5:10 pm 6:10 pm Closed book but I ll provide a similar level of basic info as in the last page of previous midterms CSE 158
A GPU-based implementation of Motion Detection from a Moving Platform
 A GPU-based implementation of Motion Detection from a Moving Platform Qian Yu, and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California {qianyu, medioni}@usc.edu
A GPU-based implementation of Motion Detection from a Moving Platform Qian Yu, and Gérard Medioni Institute for Robotics and Intelligent Systems University of Southern California {qianyu, medioni}@usc.edu
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
AUTOMATIC OBJECT DETECTION IN VIDEO SEQUENCES WITH CAMERA IN MOTION. Ninad Thakoor, Jean Gao and Huamei Chen
 AUTOMATIC OBJECT DETECTION IN VIDEO SEQUENCES WITH CAMERA IN MOTION Ninad Thakoor, Jean Gao and Huamei Chen Computer Science and Engineering Department The University of Texas Arlington TX 76019, USA ABSTRACT
AUTOMATIC OBJECT DETECTION IN VIDEO SEQUENCES WITH CAMERA IN MOTION Ninad Thakoor, Jean Gao and Huamei Chen Computer Science and Engineering Department The University of Texas Arlington TX 76019, USA ABSTRACT
DT-Binarize: A Hybrid Binarization Method using Decision Tree for Protein Crystallization Images
 DT-Binarize: A Hybrid Binarization Method using Decision Tree for Protein Crystallization Images İmren Dinç 1, Semih Dinç 1, Madhav Sigdel 1, Madhu S. Sigdel 1, Marc L. Pusey 2, Ramazan S. Aygün 1 1 DataMedia
DT-Binarize: A Hybrid Binarization Method using Decision Tree for Protein Crystallization Images İmren Dinç 1, Semih Dinç 1, Madhav Sigdel 1, Madhu S. Sigdel 1, Marc L. Pusey 2, Ramazan S. Aygün 1 1 DataMedia
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
INF4820, Algorithms for AI and NLP: Evaluating Classifiers Clustering
 INF4820, Algorithms for AI and NLP: Evaluating Classifiers Clustering Erik Velldal University of Oslo Sept. 18, 2012 Topics for today 2 Classification Recap Evaluating classifiers Accuracy, precision,
INF4820, Algorithms for AI and NLP: Evaluating Classifiers Clustering Erik Velldal University of Oslo Sept. 18, 2012 Topics for today 2 Classification Recap Evaluating classifiers Accuracy, precision,
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Lecture: k-means & mean-shift clustering
 Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap: Image Segmentation Goal: identify groups of pixels that go together 2 Recap: Gestalt
Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 Recap: Image Segmentation Goal: identify groups of pixels that go together 2 Recap: Gestalt
Lecture: k-means & mean-shift clustering
 Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap: Image Segmentation Goal: identify groups of pixels that go together
Lecture: k-means & mean-shift clustering Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab Lecture 11-1 Recap: Image Segmentation Goal: identify groups of pixels that go together
Locally Weighted Learning for Control. Alexander Skoglund Machine Learning Course AASS, June 2005
 Locally Weighted Learning for Control Alexander Skoglund Machine Learning Course AASS, June 2005 Outline Locally Weighted Learning, Christopher G. Atkeson et. al. in Artificial Intelligence Review, 11:11-73,1997
Locally Weighted Learning for Control Alexander Skoglund Machine Learning Course AASS, June 2005 Outline Locally Weighted Learning, Christopher G. Atkeson et. al. in Artificial Intelligence Review, 11:11-73,1997
Idle Object Detection in Video for Banking ATM Applications
 Research Journal of Applied Sciences, Engineering and Technology 4(24): 5350-5356, 2012 ISSN: 2040-7467 Maxwell Scientific Organization, 2012 Submitted: March 18, 2012 Accepted: April 06, 2012 Published:
Research Journal of Applied Sciences, Engineering and Technology 4(24): 5350-5356, 2012 ISSN: 2040-7467 Maxwell Scientific Organization, 2012 Submitted: March 18, 2012 Accepted: April 06, 2012 Published:
CSE 5243 INTRO. TO DATA MINING
 CSE 5243 INTRO. TO DATA MINING Cluster Analysis: Basic Concepts and Methods Huan Sun, CSE@The Ohio State University 09/25/2017 Slides adapted from UIUC CS412, Fall 2017, by Prof. Jiawei Han 2 Chapter 10.
CSE 5243 INTRO. TO DATA MINING Cluster Analysis: Basic Concepts and Methods Huan Sun, CSE@The Ohio State University 09/25/2017 Slides adapted from UIUC CS412, Fall 2017, by Prof. Jiawei Han 2 Chapter 10.
CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS
 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS CHAPTER 4 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS 4.1 Introduction Optical character recognition is one of
CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS CHAPTER 4 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS 4.1 Introduction Optical character recognition is one of
Center for Automation Research, University of Maryland. The independence measure is the residual normal
 Independent Motion: The Importance of History Robert Pless, Tomas Brodsky, and Yiannis Aloimonos Center for Automation Research, University of Maryland College Park, MD, 74-375 Abstract We consider a problem
Independent Motion: The Importance of History Robert Pless, Tomas Brodsky, and Yiannis Aloimonos Center for Automation Research, University of Maryland College Park, MD, 74-375 Abstract We consider a problem
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Moving Object Segmentation using Scene Understanding
 Moving Object Segmentation using Scene Understanding A. G. Amitha Perera Glen Brooksby Anthony Hoogs Gianfranco Doretto GE Global Research One Research Circle, Niskayuna, New York 1239 {perera,brooksby,hoogs,doretto}@research.ge.com
Moving Object Segmentation using Scene Understanding A. G. Amitha Perera Glen Brooksby Anthony Hoogs Gianfranco Doretto GE Global Research One Research Circle, Niskayuna, New York 1239 {perera,brooksby,hoogs,doretto}@research.ge.com
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Spatio temporal Segmentation using Laserscanner and Video Sequences
 Spatio temporal Segmentation using Laserscanner and Video Sequences Nico Kaempchen, Markus Zocholl and Klaus C.J. Dietmayer Department of Measurement, Control and Microtechnology University of Ulm, D 89081
Spatio temporal Segmentation using Laserscanner and Video Sequences Nico Kaempchen, Markus Zocholl and Klaus C.J. Dietmayer Department of Measurement, Control and Microtechnology University of Ulm, D 89081
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
k-means A classical clustering algorithm
 k-means A classical clustering algorithm Devert Alexandre School of Software Engineering of USTC 30 November 2012 Slide 1/65 Table of Contents 1 Introduction 2 Visual demo Step by step Voronoi diagrams
k-means A classical clustering algorithm Devert Alexandre School of Software Engineering of USTC 30 November 2012 Slide 1/65 Table of Contents 1 Introduction 2 Visual demo Step by step Voronoi diagrams
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION
 COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
COMPARATIVE STUDY OF DIFFERENT APPROACHES FOR EFFICIENT RECTIFICATION UNDER GENERAL MOTION Mr.V.SRINIVASA RAO 1 Prof.A.SATYA KALYAN 2 DEPARTMENT OF COMPUTER SCIENCE AND ENGINEERING PRASAD V POTLURI SIDDHARTHA
Information Retrieval and Web Search Engines
 Information Retrieval and Web Search Engines Lecture 7: Document Clustering December 4th, 2014 Wolf-Tilo Balke and José Pinto Institut für Informationssysteme Technische Universität Braunschweig The Cluster
Information Retrieval and Web Search Engines Lecture 7: Document Clustering December 4th, 2014 Wolf-Tilo Balke and José Pinto Institut für Informationssysteme Technische Universität Braunschweig The Cluster
SURVEILLANCE cameras have been widely deployed to
 1 Long-Term Identity-Aware Multi-Person Tracking for Surveillance Video Summarization Shoou-I Yu, Yi Yang, Xuanchong Li, and Alexander G. Hauptmann arxiv:1604.07468v2 [cs.cv] 11 Apr 2017 Abstract Multi-person
1 Long-Term Identity-Aware Multi-Person Tracking for Surveillance Video Summarization Shoou-I Yu, Yi Yang, Xuanchong Li, and Alexander G. Hauptmann arxiv:1604.07468v2 [cs.cv] 11 Apr 2017 Abstract Multi-person
Unsupervised Learning
 Unsupervised Learning Unsupervised learning Until now, we have assumed our training samples are labeled by their category membership. Methods that use labeled samples are said to be supervised. However,
Unsupervised Learning Unsupervised learning Until now, we have assumed our training samples are labeled by their category membership. Methods that use labeled samples are said to be supervised. However,
LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION
 LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION Ammar Zayouna Richard Comley Daming Shi Middlesex University School of Engineering and Information Sciences Middlesex University, London NW4 4BT, UK A.Zayouna@mdx.ac.uk
LOCAL-GLOBAL OPTICAL FLOW FOR IMAGE REGISTRATION Ammar Zayouna Richard Comley Daming Shi Middlesex University School of Engineering and Information Sciences Middlesex University, London NW4 4BT, UK A.Zayouna@mdx.ac.uk
Automated Video Analysis of Crowd Behavior
 Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009. We Are... Lab for Perception, Action and Cognition Research Interest:
Automated Video Analysis of Crowd Behavior Robert Collins CSE Department Mar 30, 2009 Computational Science Seminar Series, Spring 2009. We Are... Lab for Perception, Action and Cognition Research Interest:
Clustering. Robert M. Haralick. Computer Science, Graduate Center City University of New York
 Clustering Robert M. Haralick Computer Science, Graduate Center City University of New York Outline K-means 1 K-means 2 3 4 5 Clustering K-means The purpose of clustering is to determine the similarity
Clustering Robert M. Haralick Computer Science, Graduate Center City University of New York Outline K-means 1 K-means 2 3 4 5 Clustering K-means The purpose of clustering is to determine the similarity
Tracking-Learning-Detection
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract Long-term tracking is the
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 6, NO., JANUARY 200 Tracking-Learning-Detection Zdenek Kalal, Krystian Mikolajczyk, and Jiri Matas, Abstract Long-term tracking is the
Unsupervised Camera Motion Estimation and Moving Object Detection in Videos
 Proceedings of the Irish Machine Vision and Image Processing conference, pp. 102-109, 2006 Unsupervised Camera Motion Estimation and Moving Object Detection in Videos Rozenn Dahyot School of Computer Science
Proceedings of the Irish Machine Vision and Image Processing conference, pp. 102-109, 2006 Unsupervised Camera Motion Estimation and Moving Object Detection in Videos Rozenn Dahyot School of Computer Science
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
VIDEO STABILIZATION WITH L1-L2 OPTIMIZATION. Hui Qu, Li Song
 VIDEO STABILIZATION WITH L-L2 OPTIMIZATION Hui Qu, Li Song Institute of Image Communication and Network Engineering, Shanghai Jiao Tong University ABSTRACT Digital videos often suffer from undesirable
VIDEO STABILIZATION WITH L-L2 OPTIMIZATION Hui Qu, Li Song Institute of Image Communication and Network Engineering, Shanghai Jiao Tong University ABSTRACT Digital videos often suffer from undesirable
Registration: Rigid vs. Deformable
 Lecture 20 Deformable / Non-Rigid Registration ch. 11 of Insight into Images edited by Terry Yoo, et al. Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by
Lecture 20 Deformable / Non-Rigid Registration ch. 11 of Insight into Images edited by Terry Yoo, et al. Spring 2017 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by
Object detection using Region Proposals (RCNN) Ernest Cheung COMP Presentation
 Ernest Cheung COMP Presentation") Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Object detection using Region Proposals (RCNN) Ernest Cheung COMP790-125 Presentation 1 2 Problem to solve Object detection Input: Image Output: Bounding box of the object 3 Object detection using CNN
Gesture based PTZ camera control
 Gesture based PTZ camera control Report submitted in May 2014 to the department of Computer Science and Engineering of National Institute of Technology Rourkela in partial fulfillment of the requirements
Gesture based PTZ camera control Report submitted in May 2014 to the department of Computer Science and Engineering of National Institute of Technology Rourkela in partial fulfillment of the requirements