CS488. Visible-Surface Determination. Luc RENAMBOT
|
|
|
- Leo Richard
- 5 years ago
- Views:
Transcription
1 CS488 Visible-Surface Determination Luc RENAMBOT 1
2 Visible-Surface Determination So far in the class we have dealt mostly with simple wireframe drawings of the models The main reason for this is so that we did not have to deal with hidden surface removal Now we want to deal with more sophisticated images so we need to deal with which parts of the model obscure other parts of the model 2


3 Examples The following sets of images show a wireframe version, a wireframe version with hidden line removal, and a solid polygonal representation of the same object 3
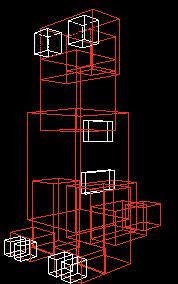

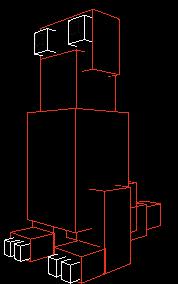

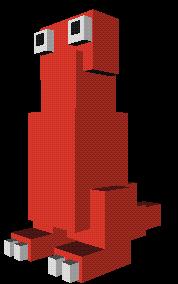
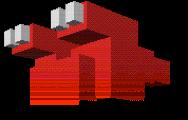
4 Examples

5 Drawing Order If we do not have a way of determining which surfaces are visible then which surfaces are visible depends on the order in which they are drawn with surfaces being drawn later appearing in front of surfaces drawn previously 5


6 Principles We do not want to draw surfaces that are hidden. If we can quickly compute which surfaces are hidden, we can bypass them and draw only the surfaces that are visible For example, if we have a solid 6 sided cube, at most 3 of the 6 sides are visible at any one time, so at least 3 of the sides do not even need to be drawn because they are the back sides 6
7 Principles We also want to avoid having to draw the polygons in a particular order. We would like to tell the graphics routines to draw all the polygons in whatever order we choose and let the graphics routines determine which polygons are in front of which other polygons With the same cube as above we do not want to have to compute for ourselves which order to draw the visible faces, and then tell the graphics routines to draw them in that order. 7
8 Principles The idea is to speed up the drawing, and give the programmer an easier time, by doing some computation before drawing Unfortunately these computations can take a lot of time, so special purpose hardware is often used to speed up the process 8
9 Techniques Two types of approaches Object space Image space 9
10 Object Space Object space algorithms do their work on the objects themselves before they are converted to pixels in the frame buffer. The resolution of the display device is irrelevant here as this calculation is done at the mathematical level of the objects For each object a in the scene Determine which parts of object a are visible (involves comparing the polygons in object a to other polygons in a and to polygons in every other object in the scene) 10
11 Image Space Image space algorithms do their work as the objects are being converted to pixels in the frame buffer The resolution of the display device is important here as this is done on a pixel by pixel basis For each pixel in the frame buffer Determine which polygon is closest to the viewer at that pixel location Determine the color of the pixel with the color of that polygon at that location 11
12 Approaches As in our discussion of vector vs raster graphics earlier in the term The mathematical (object space) algorithms tended to be used with the vector hardware Whereas the pixel based (image space) algorithms tended to be used with the raster hardware 12
13 Homogeneous Coordinates When we talked about 3D transformations we reached a point near the end when we converted the 3D (or 4D with homogeneous coordinates) to 2D by ignoring the Z values Now we will use those Z values to determine which parts of which polygons (or lines) are in front of which parts of other polygons 13
14 Technique There are different levels of checking that can be done: Object Polygon Part of a Polygon 14
15 Transparency There are also times when we may not want to cull out polygons that are behind other polygons If the frontmost polygon is transparent then we want to be able to 'see through' it to the polygons that are behind it as shown below 15


16 Transparent Objects Which objects are transparent in the scene? 16
17 Coherence We used the idea of coherence before in our line drawing algorithm We want to exploit 'local similarity' to reduce the amount of computation needed This is how compression algorithms work 17
18 Coherence Face - properties (such as color, lighting) vary smoothly across a face (or polygon) Depth - adjacent areas on a surface have similar depths Frame - images at successive time intervals tend to be similar Scan Line - adjacent scan lines tend to have similar spans of objects Area - adjacent pixels tend to be covered by the same face Object - if objects are separate from each other (ie they do not overlap) then we only need to compare polygons of the same object, and not one object to another Edge - edges only disappear when they go behind another edge or face Implied Edge - line of intersection of 2 faces can be determined by the endpoints of the intersection 18
19 Extent Rather than dealing with a complex object, it is often easier to deal with a simpler version of the object In 2D: a bounding box In 3D: a bounding volume 19
20 Bounding Box We convert a complex object into a simpler outline, generally in the shape of a box Every part of the object is guaranteed to fall within the bounding box 20
21 Bounding Box Checks can then be made on the bounding box to make quick decisions (ie does a ray pass through the box.) For more detail, checks would then be made on the object in the box. There are many ways to define the bounding box 21
22 Bounding Box The simplest way is to take the minimum and maximum X, Y, and Z values to create a box You can also have bounding boxes that rotate with the object, bounding spheres, bounding cylinders, etc. 22
23 Back-Face Culling Back-face culling an object space algorithm Works on 'solid' objects which you are looking at from the outside That is, the polygons of the surface of the object completely enclose the object 23
24 Normals Every planar polygon has a surface normal, that is, a vector that is normal to the surface of the polygon Actually every planar polygon has two normals Given that this polygon is part of a 'solid' object we are interested in the normal that points OUT, rather than the normal that points in 24


25 Back Face Front facing OpenGL specifies that all polygons be drawn such that the vertices are given in counterclockwise order as you look at the visible side of polygon in order to generate the 'correct' normal. Any polygons whose normal points away from the viewer is a 'back-facing' polygon and does not need to be further investigated Back facing 25

26 Computing To find back facing polygons, the dot product of the surface normal of each polygon is taken with a vector from the center of projection to any point on the polygon The dot product is then used to determine what direction the polygon is facing: greater than 0 : back facing equal to 0 : polygon viewed on edge less than 0 : front facing 26
27 Dot Product a.b = a b cos(theta) a.b = 0 orthogonal vectors a.b = ax*bx + ay*by+ az*bz 27


28 Example 28
29 OpenGL OpenGL back-face culling is turned on using: glcullface(gl_back); glenable(gl_cull_face); 29

30 Remarks Back-face culling can very quickly remove unnecessary polygons Unfortunately there are often times when back-face culling can not be used if you wish to make an open-topped box - the inside and the outside of the box both need to be visible, so either two sets of polygons must be generated, one set facing out and another facing in, or back-face culling must be turned off to draw that object 30
31 Depth Buffer Early on we talked about the frame buffer which holds the color for each pixel to be displayed This buffer could contain a variable number of bytes for each pixel depending on whether it was a grayscale, RGB, or color indexed frame buffer All of the elements of the frame buffer are initially set to be the background color As lines and polygons are drawn the color is set to be the color of the line or polygon at that point 31
32 Depth Buffer We now introduce another buffer which is the same size as the frame buffer but contains depth information instead of color information 32
33 Z-Buffering Image-space algorithm All of the elements of the z-buffer are initially set to be 'very far away Whenever a pixel color is to be changed, the depth of this new color is compared to the current depth in the z- buffer If this color is 'closer' than the previous color the pixel is given the new color The z-buffer entry for that pixel is updated as well Otherwise, the pixel retains the old color, the z-buffer retains its old value 33
34 Algorithm for each polygon for each pixel p in the polygon's projection { //z ranges from -1 to 0 pz = polygon's normalized z-value at (x, y); if (pz > zbuffer[x, y]) // closer to the camera { zbuffer[x, y] = pz; framebuffer[x, y] = colour of pixel p } } 34
35 Remarks This is very nice since the order of drawing polygons does not matter, the algorithm will always display the color of the closest point The biggest problem with the z-buffer is its finite precision It is important to set the near and far clipping planes to be as close together as possible to increase the resolution of the z-buffer within that range Otherwise, even though one polygon may mathematically be 'in front' of another that difference may disappear due to roundoff error 35
36 OpenGL OpenGL z-buffer and frame buffer are cleared using: glclear(gl_depth_buffer_bit GL_COLOR_BUFFER_BIT); OpenGL z-buffering is turned on using: glenable(gl_depth_test); Also gldepthfunc(gl_less) gldepthrange(0, 1) 36

37 Example The depth-buffer is especially useful when it is difficult to order the polygons in the scene based on their depth 37
38 Warnock's Algorithm Warnock's algorithm is a recursive areasubdivision algorithm It looks at an area of the image If is is easy to determine which polygons are visible in the area, they are drawn else the area is subdivided into smaller parts and the algorithm recurses. Eventually an area will be represented by a single non-intersecting polygon 38

39 Iteration At each iteration the area of interest is subdivided into four equal areas Each polygon is compared to each area and is put into one of four bins Surrounding polygons - completely contain the area Intersecting polygons - intersect the area Contained polygons - completely contained in the area Disjoint polygons - completely outside the area 39
40 For a given area: Iteration case 1. If all polygons are disjoint then the background color fills the area case 2. If there is a single contained polygon or intersecting polygon then the background color is used to fill the area, then the part of the polygon contained in the area is filled with the color of that polygon case 3. If there is a single surrounding polygon and no intersecting or contained polygons then the area is filled with the color of the surrounding polygon case 4. If there is a surrounding polygon in front of any other surrounding, intersecting, or contained polygons then the area is filled with the color of the front surrounding polygon Otherwise break the area into 4 equal parts and recurse 40

41 Example Book, pages case 1. If all polygons are disjoint case 2. If there is a single contained polygon or intersecting polygon case 3. If there is a single surrounding polygon and no intersecting or contained polygons case 4. If there is a surrounding polygon in front of any other surrounding, intersecting, or contained polygons 41
42 Remarks Bounding boxes can help At worst, log base 2 of the max(screen width, screen height) recursive steps will be needed At that point the area being looked at is only a single pixel which can't be divided further At that point, the distance to each polygon intersecting,contained in, or surrounding the area is computed at the center of the polygon to determine the closest polygon and its color Could be faster than z-buffer, but only for small number of polygons 42
43 Next Time More Visible-Surface Determination Assignment 3: Monday 20th November 43
Page 1. Area-Subdivision Algorithms z-buffer Algorithm List Priority Algorithms BSP (Binary Space Partitioning Tree) Scan-line Algorithms
 Scan-line Algorithms") Visible Surface Determination Visibility Culling Area-Subdivision Algorithms z-buffer Algorithm List Priority Algorithms BSP (Binary Space Partitioning Tree) Scan-line Algorithms Divide-and-conquer strategy:
Visible Surface Determination Visibility Culling Area-Subdivision Algorithms z-buffer Algorithm List Priority Algorithms BSP (Binary Space Partitioning Tree) Scan-line Algorithms Divide-and-conquer strategy:
Identifying those parts of a scene that are visible from a chosen viewing position, and only process (scan convert) those parts
 those parts") Visible Surface Detection Identifying those parts of a scene that are visible from a chosen viewing position, and only process (scan convert) those parts Two approaches: 1. Object space methods 2. Image
Visible Surface Detection Identifying those parts of a scene that are visible from a chosen viewing position, and only process (scan convert) those parts Two approaches: 1. Object space methods 2. Image
Hidden Surface Removal
 Outline Introduction Hidden Surface Removal Hidden Surface Removal Simone Gasparini gasparini@elet.polimi.it Back face culling Depth sort Z-buffer Introduction Graphics pipeline Introduction Modeling Geom
Outline Introduction Hidden Surface Removal Hidden Surface Removal Simone Gasparini gasparini@elet.polimi.it Back face culling Depth sort Z-buffer Introduction Graphics pipeline Introduction Modeling Geom
4.5 VISIBLE SURFACE DETECTION METHODES
 4.5 VISIBLE SURFACE DETECTION METHODES A major consideration in the generation of realistic graphics displays is identifying those parts of a scene that are visible from a chosen viewing position. There
4.5 VISIBLE SURFACE DETECTION METHODES A major consideration in the generation of realistic graphics displays is identifying those parts of a scene that are visible from a chosen viewing position. There
Computer Graphics. Bing-Yu Chen National Taiwan University
 Computer Graphics Bing-Yu Chen National Taiwan University Visible-Surface Determination Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm Scan-Line Algorithm
Computer Graphics Bing-Yu Chen National Taiwan University Visible-Surface Determination Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm Scan-Line Algorithm
Two basic types: image-precision and object-precision. Image-precision For each pixel, determine which object is visable Requires np operations
 walters@buffalo.edu CSE 480/580 Lecture 21 Slide 1 Visible-Surface Determination (Hidden Surface Removal) Computationaly expensive Two basic types: image-precision and object-precision For n objects and
walters@buffalo.edu CSE 480/580 Lecture 21 Slide 1 Visible-Surface Determination (Hidden Surface Removal) Computationaly expensive Two basic types: image-precision and object-precision For n objects and
Visible-Surface Detection Methods. Chapter? Intro. to Computer Graphics Spring 2008, Y. G. Shin
 Visible-Surface Detection Methods Chapter? Intro. to Computer Graphics Spring 2008, Y. G. Shin The Visibility Problem [Problem Statement] GIVEN: a set of 3-D surfaces, a projection from 3-D to 2-D screen,
Visible-Surface Detection Methods Chapter? Intro. to Computer Graphics Spring 2008, Y. G. Shin The Visibility Problem [Problem Statement] GIVEN: a set of 3-D surfaces, a projection from 3-D to 2-D screen,
CSE 167: Introduction to Computer Graphics Lecture #9: Visibility. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2018
 CSE 167: Introduction to Computer Graphics Lecture #9: Visibility Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2018 Announcements Midterm Scores are on TritonEd Exams to be
CSE 167: Introduction to Computer Graphics Lecture #9: Visibility Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2018 Announcements Midterm Scores are on TritonEd Exams to be
More Visible Surface Detection. CS116B Chris Pollett Mar. 16, 2005.
 More Visible Surface Detection CS116B Chris Pollett Mar. 16, 2005. Outline The A-Buffer Method The Scan-Line Method The Depth Sorting Method BSP Trees, Area Subdivision, and Octrees Wire-frame Visibility
More Visible Surface Detection CS116B Chris Pollett Mar. 16, 2005. Outline The A-Buffer Method The Scan-Line Method The Depth Sorting Method BSP Trees, Area Subdivision, and Octrees Wire-frame Visibility
9. Visible-Surface Detection Methods
 9. Visible-Surface Detection Methods More information about Modelling and Perspective Viewing: Before going to visible surface detection, we first review and discuss the followings: 1. Modelling Transformation:
9. Visible-Surface Detection Methods More information about Modelling and Perspective Viewing: Before going to visible surface detection, we first review and discuss the followings: 1. Modelling Transformation:
Computer Graphics. Bing-Yu Chen National Taiwan University The University of Tokyo
 Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Hidden-Surface Removal Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm
Computer Graphics Bing-Yu Chen National Taiwan University The University of Tokyo Hidden-Surface Removal Back-Face Culling The Depth-Sort Algorithm Binary Space-Partitioning Trees The z-buffer Algorithm
Visible Surface Detection Methods
 Visible urface Detection Methods Visible-urface Detection identifying visible parts of a scene (also hidden- elimination) type of algorithm depends on: complexity of scene type of objects available equipment
Visible urface Detection Methods Visible-urface Detection identifying visible parts of a scene (also hidden- elimination) type of algorithm depends on: complexity of scene type of objects available equipment
Werner Purgathofer
 Einführung in Visual Computing 186.822 Visible Surface Detection Werner Purgathofer Visibility in the Rendering Pipeline scene objects in object space object capture/creation ti modeling viewing projection
Einführung in Visual Computing 186.822 Visible Surface Detection Werner Purgathofer Visibility in the Rendering Pipeline scene objects in object space object capture/creation ti modeling viewing projection
Culling. Computer Graphics CSE 167 Lecture 12
 Culling Computer Graphics CSE 167 Lecture 12 CSE 167: Computer graphics Culling Definition: selecting from a large quantity In computer graphics: selecting primitives (or batches of primitives) that are
Culling Computer Graphics CSE 167 Lecture 12 CSE 167: Computer graphics Culling Definition: selecting from a large quantity In computer graphics: selecting primitives (or batches of primitives) that are
VISIBILITY & CULLING. Don t draw what you can t see. Thomas Larsson, Afshin Ameri DVA338, Spring 2018, MDH
 VISIBILITY & CULLING Don t draw what you can t see. Thomas Larsson, Afshin Ameri DVA338, Spring 2018, MDH Visibility Visibility Given a set of 3D objects, which surfaces are visible from a specific point
VISIBILITY & CULLING Don t draw what you can t see. Thomas Larsson, Afshin Ameri DVA338, Spring 2018, MDH Visibility Visibility Given a set of 3D objects, which surfaces are visible from a specific point
CSE528 Computer Graphics: Theory, Algorithms, and Applications
 CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
CSE528 Computer Graphics: Theory, Algorithms, and Applications Hong Qin State University of New York at Stony Brook (Stony Brook University) Stony Brook, New York 11794--4400 Tel: (631)632-8450; Fax: (631)632-8334
(Refer Slide Time 03:00)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture #30 Visible Surface Detection (Contd ) We continue the discussion on Visible
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture #30 Visible Surface Detection (Contd ) We continue the discussion on Visible
Clipping. Angel and Shreiner: Interactive Computer Graphics 7E Addison-Wesley 2015
 Clipping 1 Objectives Clipping lines First of implementation algorithms Clipping polygons (next lecture) Focus on pipeline plus a few classic algorithms 2 Clipping 2D against clipping window 3D against
Clipping 1 Objectives Clipping lines First of implementation algorithms Clipping polygons (next lecture) Focus on pipeline plus a few classic algorithms 2 Clipping 2D against clipping window 3D against
Computer Graphics II
 Computer Graphics II Autumn 2017-2018 Outline Visible Surface Determination Methods (contd.) 1 Visible Surface Determination Methods (contd.) Outline Visible Surface Determination Methods (contd.) 1 Visible
Computer Graphics II Autumn 2017-2018 Outline Visible Surface Determination Methods (contd.) 1 Visible Surface Determination Methods (contd.) Outline Visible Surface Determination Methods (contd.) 1 Visible
CSE 167: Introduction to Computer Graphics Lecture #10: View Frustum Culling
 CSE 167: Introduction to Computer Graphics Lecture #10: View Frustum Culling Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2015 Announcements Project 4 due tomorrow Project
CSE 167: Introduction to Computer Graphics Lecture #10: View Frustum Culling Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2015 Announcements Project 4 due tomorrow Project
Motivation. Culling Don t draw what you can t see! What can t we see? Low-level Culling
 Motivation Culling Don t draw what you can t see! Thomas Larsson Mälardalen University April 7, 2016 Image correctness Rendering speed One day we will have enough processing power!? Goals of real-time
Motivation Culling Don t draw what you can t see! Thomas Larsson Mälardalen University April 7, 2016 Image correctness Rendering speed One day we will have enough processing power!? Goals of real-time
CSE328 Fundamentals of Computer Graphics: Concepts, Theory, Algorithms, and Applications
 CSE328 Fundamentals of Computer Graphics: Concepts, Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-4400 Tel: (631)632-8450; Fax:
CSE328 Fundamentals of Computer Graphics: Concepts, Theory, Algorithms, and Applications Hong Qin Stony Brook University (SUNY at Stony Brook) Stony Brook, New York 11794-4400 Tel: (631)632-8450; Fax:
Pipeline Operations. CS 4620 Lecture 10
 Pipeline Operations CS 4620 Lecture 10 2008 Steve Marschner 1 Hidden surface elimination Goal is to figure out which color to make the pixels based on what s in front of what. Hidden surface elimination
Pipeline Operations CS 4620 Lecture 10 2008 Steve Marschner 1 Hidden surface elimination Goal is to figure out which color to make the pixels based on what s in front of what. Hidden surface elimination
8. Hidden Surface Elimination
 8. Hidden Surface Elimination Identification and Removal of parts of picture that are not visible from a chosen viewing position. 1 8. Hidden Surface Elimination Basic idea: Overwriting Paint things in
8. Hidden Surface Elimination Identification and Removal of parts of picture that are not visible from a chosen viewing position. 1 8. Hidden Surface Elimination Basic idea: Overwriting Paint things in
Overview. Pipeline implementation I. Overview. Required Tasks. Preliminaries Clipping. Hidden Surface removal
 Overview Pipeline implementation I Preliminaries Clipping Line clipping Hidden Surface removal Overview At end of the geometric pipeline, vertices have been assembled into primitives Must clip out primitives
Overview Pipeline implementation I Preliminaries Clipping Line clipping Hidden Surface removal Overview At end of the geometric pipeline, vertices have been assembled into primitives Must clip out primitives
Clipping & Culling. Lecture 11 Spring Trivial Rejection Outcode Clipping Plane-at-a-time Clipping Backface Culling
 Clipping & Culling Trivial Rejection Outcode Clipping Plane-at-a-time Clipping Backface Culling Lecture 11 Spring 2015 What is Clipping? Clipping is a procedure for spatially partitioning geometric primitives,
Clipping & Culling Trivial Rejection Outcode Clipping Plane-at-a-time Clipping Backface Culling Lecture 11 Spring 2015 What is Clipping? Clipping is a procedure for spatially partitioning geometric primitives,
Visible-Surface Detection 1. 2IV60 Computer graphics set 11: Hidden Surfaces. Visible-Surface Detection 3. Visible-Surface Detection 2
 Visible-urface Detection IV60 omputer graphics set : Hidden urfaces Problem: Given a scene and a projection, what can we see? Jack van Wijk TU/e Visible-urface Detection Terminology: Visible-surface detection
Visible-urface Detection IV60 omputer graphics set : Hidden urfaces Problem: Given a scene and a projection, what can we see? Jack van Wijk TU/e Visible-urface Detection Terminology: Visible-surface detection
CSE 167: Introduction to Computer Graphics Lecture #11: Visibility Culling
 CSE 167: Introduction to Computer Graphics Lecture #11: Visibility Culling Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017 Announcements Project 3 due Monday Nov 13 th at
CSE 167: Introduction to Computer Graphics Lecture #11: Visibility Culling Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2017 Announcements Project 3 due Monday Nov 13 th at
CSE 167: Introduction to Computer Graphics Lecture #4: Vertex Transformation
 CSE 167: Introduction to Computer Graphics Lecture #4: Vertex Transformation Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Project 2 due Friday, October 11
CSE 167: Introduction to Computer Graphics Lecture #4: Vertex Transformation Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Announcements Project 2 due Friday, October 11
Topic #1: Rasterization (Scan Conversion)
") Topic #1: Rasterization (Scan Conversion) We will generally model objects with geometric primitives points, lines, and polygons For display, we need to convert them to pixels for points it s obvious but
Topic #1: Rasterization (Scan Conversion) We will generally model objects with geometric primitives points, lines, and polygons For display, we need to convert them to pixels for points it s obvious but
Shadows in the graphics pipeline
 Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
Shadows in the graphics pipeline Steve Marschner Cornell University CS 569 Spring 2008, 19 February There are a number of visual cues that help let the viewer know about the 3D relationships between objects
CEng 477 Introduction to Computer Graphics Fall 2007
 Visible Surface Detection CEng 477 Introduction to Computer Graphics Fall 2007 Visible Surface Detection Visible surface detection or hidden surface removal. Realistic scenes: closer objects occludes the
Visible Surface Detection CEng 477 Introduction to Computer Graphics Fall 2007 Visible Surface Detection Visible surface detection or hidden surface removal. Realistic scenes: closer objects occludes the
Speeding up your game
 Speeding up your game The scene graph Culling techniques Level-of-detail rendering (LODs) Collision detection Resources and pointers (adapted by Marc Levoy from a lecture by Tomas Möller, using material
Speeding up your game The scene graph Culling techniques Level-of-detail rendering (LODs) Collision detection Resources and pointers (adapted by Marc Levoy from a lecture by Tomas Möller, using material
VIII. Visibility algorithms (II)
") VIII. Visibility algorithms (II) Hybrid algorithsms: priority list algorithms Find the object visibility Combine the operations in object space (examples: comparisons and object partitioning) with operations
VIII. Visibility algorithms (II) Hybrid algorithsms: priority list algorithms Find the object visibility Combine the operations in object space (examples: comparisons and object partitioning) with operations
Computer Science 426 Midterm 3/11/04, 1:30PM-2:50PM
 NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
NAME: Login name: Computer Science 46 Midterm 3//4, :3PM-:5PM This test is 5 questions, of equal weight. Do all of your work on these pages (use the back for scratch space), giving the answer in the space
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Last Time? The Traditional Graphics Pipeline Reading for Today A Practical Model for Subsurface Light Transport, Jensen, Marschner, Levoy, & Hanrahan, SIGGRAPH 2001 Participating Media Measuring BRDFs
Renderer Implementation: Basics and Clipping. Overview. Preliminaries. David Carr Virtual Environments, Fundamentals Spring 2005
 INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Renderer Implementation: Basics and Clipping David Carr Virtual Environments, Fundamentals Spring 2005 Feb-28-05 SMM009, Basics and Clipping 1
INSTITUTIONEN FÖR SYSTEMTEKNIK LULEÅ TEKNISKA UNIVERSITET Renderer Implementation: Basics and Clipping David Carr Virtual Environments, Fundamentals Spring 2005 Feb-28-05 SMM009, Basics and Clipping 1
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1
 graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1
 graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
graphics pipeline computer graphics graphics pipeline 2009 fabio pellacini 1 graphics pipeline sequence of operations to generate an image using object-order processing primitives processed one-at-a-time
Computer Graphics. Shadows
 Computer Graphics Lecture 10 Shadows Taku Komura Today Shadows Overview Projective shadows Shadow texture Shadow volume Shadow map Soft shadows Why Shadows? Shadows tell us about the relative locations
Computer Graphics Lecture 10 Shadows Taku Komura Today Shadows Overview Projective shadows Shadow texture Shadow volume Shadow map Soft shadows Why Shadows? Shadows tell us about the relative locations
Computing Visibility. Backface Culling for General Visibility. One More Trick with Planes. BSP Trees Ray Casting Depth Buffering Quiz
 Computing Visibility BSP Trees Ray Casting Depth Buffering Quiz Power of Plane Equations We ve gotten a lot of mileage out of one simple equation. Basis for D outcode-clipping Basis for plane-at-a-time
Computing Visibility BSP Trees Ray Casting Depth Buffering Quiz Power of Plane Equations We ve gotten a lot of mileage out of one simple equation. Basis for D outcode-clipping Basis for plane-at-a-time
CS 498 VR. Lecture 18-4/4/18. go.illinois.edu/vrlect18
 CS 498 VR Lecture 18-4/4/18 go.illinois.edu/vrlect18 Review and Supplement for last lecture 1. What is aliasing? What is Screen Door Effect? 2. How image-order rendering works? 3. If there are several
CS 498 VR Lecture 18-4/4/18 go.illinois.edu/vrlect18 Review and Supplement for last lecture 1. What is aliasing? What is Screen Door Effect? 2. How image-order rendering works? 3. If there are several
Lecture 4. Viewing, Projection and Viewport Transformations
 Notes on Assignment Notes on Assignment Hw2 is dependent on hw1 so hw1 and hw2 will be graded together i.e. You have time to finish both by next monday 11:59p Email list issues - please cc: elif@cs.nyu.edu
Notes on Assignment Notes on Assignment Hw2 is dependent on hw1 so hw1 and hw2 will be graded together i.e. You have time to finish both by next monday 11:59p Email list issues - please cc: elif@cs.nyu.edu
COMP30019 Graphics and Interaction Scan Converting Polygons and Lines
 COMP30019 Graphics and Interaction Scan Converting Polygons and Lines Department of Computer Science and Software Engineering The Lecture outline Introduction Scan conversion Scan-line algorithm Edge coherence
COMP30019 Graphics and Interaction Scan Converting Polygons and Lines Department of Computer Science and Software Engineering The Lecture outline Introduction Scan conversion Scan-line algorithm Edge coherence
Lecture 3 Sections 2.2, 4.4. Mon, Aug 31, 2009
 Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
Model s Lecture 3 Sections 2.2, 4.4 World s Eye s Clip s s s Window s Hampden-Sydney College Mon, Aug 31, 2009 Outline Model s World s Eye s Clip s s s Window s 1 2 3 Model s World s Eye s Clip s s s Window
3D Object Representation
 3D Object Representation Object Representation So far we have used the notion of expressing 3D data as points(or vertices) in a Cartesian or Homogeneous coordinate system. We have simplified the representation
3D Object Representation Object Representation So far we have used the notion of expressing 3D data as points(or vertices) in a Cartesian or Homogeneous coordinate system. We have simplified the representation
The Traditional Graphics Pipeline
 Final Projects Proposals due Thursday 4/8 Proposed project summary At least 3 related papers (read & summarized) Description of series of test cases Timeline & initial task assignment The Traditional Graphics
Final Projects Proposals due Thursday 4/8 Proposed project summary At least 3 related papers (read & summarized) Description of series of test cases Timeline & initial task assignment The Traditional Graphics
Computer Graphics. Chapter 1 (Related to Introduction to Computer Graphics Using Java 2D and 3D)
") Computer Graphics Chapter 1 (Related to Introduction to Computer Graphics Using Java 2D and 3D) Introduction Applications of Computer Graphics: 1) Display of Information 2) Design 3) Simulation 4) User
Computer Graphics Chapter 1 (Related to Introduction to Computer Graphics Using Java 2D and 3D) Introduction Applications of Computer Graphics: 1) Display of Information 2) Design 3) Simulation 4) User
FROM VERTICES TO FRAGMENTS. Lecture 5 Comp3080 Computer Graphics HKBU
 FROM VERTICES TO FRAGMENTS Lecture 5 Comp3080 Computer Graphics HKBU OBJECTIVES Introduce basic implementation strategies Clipping Scan conversion OCTOBER 9, 2011 2 OVERVIEW At end of the geometric pipeline,
FROM VERTICES TO FRAGMENTS Lecture 5 Comp3080 Computer Graphics HKBU OBJECTIVES Introduce basic implementation strategies Clipping Scan conversion OCTOBER 9, 2011 2 OVERVIEW At end of the geometric pipeline,
Rendering. Converting a 3D scene to a 2D image. Camera. Light. Rendering. View Plane
 Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
Rendering Pipeline Rendering Converting a 3D scene to a 2D image Rendering Light Camera 3D Model View Plane Rendering Converting a 3D scene to a 2D image Basic rendering tasks: Modeling: creating the world
SFU CMPT 361 Computer Graphics Fall 2017 Assignment 2. Assignment due Thursday, October 19, 11:59pm
 SFU CMPT 361 Computer Graphics Fall 2017 Assignment 2 Assignment due Thursday, October 19, 11:59pm For this assignment, you are to interpret a 3D graphics specification language, along with doing some
SFU CMPT 361 Computer Graphics Fall 2017 Assignment 2 Assignment due Thursday, October 19, 11:59pm For this assignment, you are to interpret a 3D graphics specification language, along with doing some
The Traditional Graphics Pipeline
 Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Last Time? The Traditional Graphics Pipeline Participating Media Measuring BRDFs 3D Digitizing & Scattering BSSRDFs Monte Carlo Simulation Dipole Approximation Today Ray Casting / Tracing Advantages? Ray
Notes on Assignment. Notes on Assignment. Notes on Assignment. Notes on Assignment
 Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
Notes on Assignment Notes on Assignment Objects on screen - made of primitives Primitives are points, lines, polygons - watch vertex ordering The main object you need is a box When the MODELVIEW matrix
CS Computer Graphics: Hidden Surface Removal
 CS 543 - Computer Graphics: Hidden Surface Removal by Robert W. Lindeman gogo@wpi.edu (with help from Emmanuel Agu ;-) Hidden Surface Removal Drawing polygonal faces on screen consumes CPU cycles We cannot
CS 543 - Computer Graphics: Hidden Surface Removal by Robert W. Lindeman gogo@wpi.edu (with help from Emmanuel Agu ;-) Hidden Surface Removal Drawing polygonal faces on screen consumes CPU cycles We cannot
Class of Algorithms. Visible Surface Determination. Back Face Culling Test. Back Face Culling: Object Space v. Back Face Culling: Object Space.
 Utah School of Computing Spring 13 Class of Algorithms Lecture Set Visible Surface Determination CS56 Computer Graphics From Rich Riesenfeld Spring 13 Object (Model) Space Algorithms Work in the model
Utah School of Computing Spring 13 Class of Algorithms Lecture Set Visible Surface Determination CS56 Computer Graphics From Rich Riesenfeld Spring 13 Object (Model) Space Algorithms Work in the model
Deferred Rendering Due: Wednesday November 15 at 10pm
 CMSC 23700 Autumn 2017 Introduction to Computer Graphics Project 4 November 2, 2017 Deferred Rendering Due: Wednesday November 15 at 10pm 1 Summary This assignment uses the same application architecture
CMSC 23700 Autumn 2017 Introduction to Computer Graphics Project 4 November 2, 2017 Deferred Rendering Due: Wednesday November 15 at 10pm 1 Summary This assignment uses the same application architecture
CSE 167: Lecture #5: Rasterization. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012
 CSE 167: Introduction to Computer Graphics Lecture #5: Rasterization Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #2 due this Friday, October
CSE 167: Introduction to Computer Graphics Lecture #5: Rasterization Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2012 Announcements Homework project #2 due this Friday, October
8. Hidden Surface Elimination
 -04-8 Hidden Surface Elimination To eliminate edges and surfaces not visible to the viewer Two categories: Object space methods: Image space methods: deal with object definitions directly Order the surfaces
-04-8 Hidden Surface Elimination To eliminate edges and surfaces not visible to the viewer Two categories: Object space methods: Image space methods: deal with object definitions directly Order the surfaces
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into
 2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
2D rendering takes a photo of the 2D scene with a virtual camera that selects an axis aligned rectangle from the scene. The photograph is placed into the viewport of the current application window. A pixel
Hidden surface removal. Computer Graphics
 Lecture Hidden Surface Removal and Rasterization Taku Komura Hidden surface removal Drawing polygonal faces on screen consumes CPU cycles Illumination We cannot see every surface in scene We don t want
Lecture Hidden Surface Removal and Rasterization Taku Komura Hidden surface removal Drawing polygonal faces on screen consumes CPU cycles Illumination We cannot see every surface in scene We don t want
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Computer Graphics. Lecture 9 Hidden Surface Removal. Taku Komura
 Computer Graphics Lecture 9 Hidden Surface Removal Taku Komura 1 Why Hidden Surface Removal? A correct rendering requires correct visibility calculations When multiple opaque polygons cover the same screen
Computer Graphics Lecture 9 Hidden Surface Removal Taku Komura 1 Why Hidden Surface Removal? A correct rendering requires correct visibility calculations When multiple opaque polygons cover the same screen
Ray Tracing. Foley & Van Dam, Chapters 15 and 16
 Ray Tracing Foley & Van Dam, Chapters 15 and 16 Ray Tracing Visible Surface Ray Tracing (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Ray Tracing Determine visibility
Ray Tracing Foley & Van Dam, Chapters 15 and 16 Ray Tracing Visible Surface Ray Tracing (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Ray Tracing Determine visibility
Computer Graphics. Rendering. by Brian Wyvill University of Calgary. cpsc/enel P 1
 Computer Graphics Rendering by Brian Wyvill University of Calgary cpsc/enel P Rendering Techniques Wire Frame Z Buffer Ray Tracing A Buffer cpsc/enel P 2 Rendering Visible Surface Determination Many Algorithms,
Computer Graphics Rendering by Brian Wyvill University of Calgary cpsc/enel P Rendering Techniques Wire Frame Z Buffer Ray Tracing A Buffer cpsc/enel P 2 Rendering Visible Surface Determination Many Algorithms,
Ray Tracing Foley & Van Dam, Chapters 15 and 16
 Foley & Van Dam, Chapters 15 and 16 (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Determine visibility of a surface by tracing rays of light from the viewer s eye
Foley & Van Dam, Chapters 15 and 16 (Ray Casting) Examples Efficiency Issues Computing Boolean Set Operations Recursive Determine visibility of a surface by tracing rays of light from the viewer s eye
Project 1, 467. (Note: This is not a graphics class. It is ok if your rendering has some flaws, like those gaps in the teapot image above ;-)
") Project 1, 467 Purpose: The purpose of this project is to learn everything you need to know for the next 9 weeks about graphics hardware. What: Write a 3D graphics hardware simulator in your language of
Project 1, 467 Purpose: The purpose of this project is to learn everything you need to know for the next 9 weeks about graphics hardware. What: Write a 3D graphics hardware simulator in your language of
Hidden Surface Elimination Raytracing. Pre-lecture business. Outline for today. Review Quiz. Image-Space vs. Object-Space
 Hidden Surface Elimination Raytracing Pre-lecture business Get going on pp4 Submit exam questions by Sunday CS148: Intro to CG Instructor: Dan Morris TA: Sean Walker August 2, 2005 Remote folks: let us
Hidden Surface Elimination Raytracing Pre-lecture business Get going on pp4 Submit exam questions by Sunday CS148: Intro to CG Instructor: Dan Morris TA: Sean Walker August 2, 2005 Remote folks: let us
(Refer Slide Time: 00:02:00)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 18 Polyfill - Scan Conversion of a Polygon Today we will discuss the concepts
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture - 18 Polyfill - Scan Conversion of a Polygon Today we will discuss the concepts
Point Cloud Filtering using Ray Casting by Eric Jensen 2012 The Basic Methodology
 Point Cloud Filtering using Ray Casting by Eric Jensen 01 The Basic Methodology Ray tracing in standard graphics study is a method of following the path of a photon from the light source to the camera,
Point Cloud Filtering using Ray Casting by Eric Jensen 01 The Basic Methodology Ray tracing in standard graphics study is a method of following the path of a photon from the light source to the camera,
Volume Shadows Tutorial Nuclear / the Lab
 Volume Shadows Tutorial Nuclear / the Lab Introduction As you probably know the most popular rendering technique, when speed is more important than quality (i.e. realtime rendering), is polygon rasterization.
Volume Shadows Tutorial Nuclear / the Lab Introduction As you probably know the most popular rendering technique, when speed is more important than quality (i.e. realtime rendering), is polygon rasterization.
CS 488. More Shading and Illumination. Luc RENAMBOT
 CS 488 More Shading and Illumination Luc RENAMBOT 1 Illumination No Lighting Ambient model Light sources Diffuse reflection Specular reflection Model: ambient + specular + diffuse Shading: flat, gouraud,
CS 488 More Shading and Illumination Luc RENAMBOT 1 Illumination No Lighting Ambient model Light sources Diffuse reflection Specular reflection Model: ambient + specular + diffuse Shading: flat, gouraud,
Hidden Surface Elimination: BSP trees
 Hidden Surface Elimination: BSP trees Outline Binary space partition (BSP) trees Polygon-aligned 1 BSP Trees Basic idea: Preprocess geometric primitives in scene to build a spatial data structure such
Hidden Surface Elimination: BSP trees Outline Binary space partition (BSP) trees Polygon-aligned 1 BSP Trees Basic idea: Preprocess geometric primitives in scene to build a spatial data structure such
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) April 1, 2003 [Angel 9.10] Frank Pfenning Carnegie
COMP371 COMPUTER GRAPHICS
 COMP371 COMPUTER GRAPHICS LECTURE 14 RASTERIZATION 1 Lecture Overview Review of last class Line Scan conversion Polygon Scan conversion Antialiasing 2 Rasterization The raster display is a matrix of picture
COMP371 COMPUTER GRAPHICS LECTURE 14 RASTERIZATION 1 Lecture Overview Review of last class Line Scan conversion Polygon Scan conversion Antialiasing 2 Rasterization The raster display is a matrix of picture
Topics and things to know about them:
 Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Practice Final CMSC 427 Distributed Tuesday, December 11, 2007 Review Session, Monday, December 17, 5:00pm, 4424 AV Williams Final: 10:30 AM Wednesday, December 19, 2007 General Guidelines: The final will
Graphics and Interaction Rendering pipeline & object modelling
 433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
433-324 Graphics and Interaction Rendering pipeline & object modelling Department of Computer Science and Software Engineering The Lecture outline Introduction to Modelling Polygonal geometry The rendering
Ray tracing. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 3/19/07 1
 Spring Instructor: Brandon Lloyd 3/19/07 1") Ray tracing Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 3/19/07 1 From last time Hidden surface removal Painter s algorithm Clipping algorithms Area subdivision BSP trees Z-Buffer
Ray tracing Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 3/19/07 1 From last time Hidden surface removal Painter s algorithm Clipping algorithms Area subdivision BSP trees Z-Buffer
Computer Graphics. Lecture 9 Environment mapping, Mirroring
 Computer Graphics Lecture 9 Environment mapping, Mirroring Today Environment Mapping Introduction Cubic mapping Sphere mapping refractive mapping Mirroring Introduction reflection first stencil buffer
Computer Graphics Lecture 9 Environment mapping, Mirroring Today Environment Mapping Introduction Cubic mapping Sphere mapping refractive mapping Mirroring Introduction reflection first stencil buffer
(Refer Slide Time 05:03 min)
") Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture # 27 Visible Surface Detection (Contd ) Hello and welcome everybody to the
Computer Graphics Prof. Sukhendu Das Dept. of Computer Science and Engineering Indian Institute of Technology, Madras Lecture # 27 Visible Surface Detection (Contd ) Hello and welcome everybody to the
PowerVR Hardware. Architecture Overview for Developers
 Public Imagination Technologies PowerVR Hardware Public. This publication contains proprietary information which is subject to change without notice and is supplied 'as is' without warranty of any kind.
Public Imagination Technologies PowerVR Hardware Public. This publication contains proprietary information which is subject to change without notice and is supplied 'as is' without warranty of any kind.
Chapter 4. Chapter 4. Computer Graphics 2006/2007 Chapter 4. Introduction to 3D 1
 Chapter 4 Chapter 4 Chapter 4. Introduction to 3D graphics 4.1 Scene traversal 4.2 Modeling transformation 4.3 Viewing transformation 4.4 Clipping 4.5 Hidden faces removal 4.6 Projection 4.7 Lighting 4.8
Chapter 4 Chapter 4 Chapter 4. Introduction to 3D graphics 4.1 Scene traversal 4.2 Modeling transformation 4.3 Viewing transformation 4.4 Clipping 4.5 Hidden faces removal 4.6 Projection 4.7 Lighting 4.8
Graphics (Output) Primitives. Chapters 3 & 4
 Primitives. Chapters 3 & 4") Graphics (Output) Primitives Chapters 3 & 4 Graphic Output and Input Pipeline Scan conversion converts primitives such as lines, circles, etc. into pixel values geometric description a finite scene area
Graphics (Output) Primitives Chapters 3 & 4 Graphic Output and Input Pipeline Scan conversion converts primitives such as lines, circles, etc. into pixel values geometric description a finite scene area
Robust Stencil Shadow Volumes. CEDEC 2001 Tokyo, Japan
 Robust Stencil Shadow Volumes CEDEC 2001 Tokyo, Japan Mark J. Kilgard Graphics Software Engineer NVIDIA Corporation 2 Games Begin to Embrace Robust Shadows 3 John Carmack s new Doom engine leads the way
Robust Stencil Shadow Volumes CEDEC 2001 Tokyo, Japan Mark J. Kilgard Graphics Software Engineer NVIDIA Corporation 2 Games Begin to Embrace Robust Shadows 3 John Carmack s new Doom engine leads the way
Today. CS-184: Computer Graphics. Lecture #10: Clipping and Hidden Surfaces. Clipping. Hidden Surface Removal
 Today CS-184: Computer Graphics Lecture #10: Clipping and Hidden Surfaces!! Prof. James O Brien University of California, Berkeley! V2015-S-10-1.0 Clipping Clipping to view volume Clipping arbitrary polygons
Today CS-184: Computer Graphics Lecture #10: Clipping and Hidden Surfaces!! Prof. James O Brien University of California, Berkeley! V2015-S-10-1.0 Clipping Clipping to view volume Clipping arbitrary polygons
Spatial Data Structures
 15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
15-462 Computer Graphics I Lecture 17 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) March 28, 2002 [Angel 8.9] Frank Pfenning Carnegie
Visualization Concepts
 AML710 CAD LECTURE 36 Visualization Concepts Visible Lines and Surfaces Visibility - Hidden lines / Surfaces Many applications require the visibility determination for lines, points, edges, surfaces or
AML710 CAD LECTURE 36 Visualization Concepts Visible Lines and Surfaces Visibility - Hidden lines / Surfaces Many applications require the visibility determination for lines, points, edges, surfaces or
Homework #2 and #3 Due Friday, October 12 th and Friday, October 19 th
 Homework #2 and #3 Due Friday, October 12 th and Friday, October 19 th 1. a. Show that the following sequences commute: i. A rotation and a uniform scaling ii. Two rotations about the same axis iii. Two
Homework #2 and #3 Due Friday, October 12 th and Friday, October 19 th 1. a. Show that the following sequences commute: i. A rotation and a uniform scaling ii. Two rotations about the same axis iii. Two
CS488 2D Graphics. Luc RENAMBOT
 CS488 2D Graphics Luc RENAMBOT 1 Topics Last time, hardware and frame buffer Now, how lines and polygons are drawn in the frame buffer. Then, how 2D and 3D models drawing into the frame buffer Then, more
CS488 2D Graphics Luc RENAMBOT 1 Topics Last time, hardware and frame buffer Now, how lines and polygons are drawn in the frame buffer. Then, how 2D and 3D models drawing into the frame buffer Then, more
COMP environment mapping Mar. 12, r = 2n(n v) v
 v") Rendering mirror surfaces The next texture mapping method assumes we have a mirror surface, or at least a reflectance function that contains a mirror component. Examples might be a car window or hood,
Rendering mirror surfaces The next texture mapping method assumes we have a mirror surface, or at least a reflectance function that contains a mirror component. Examples might be a car window or hood,
Visible Surface Determination: Intro
 Visible Surface Determination: Intro VSD deals with determining what is visible in a scene 2 general approaches are used: 1. Object precision Older approach Designed for vector displays Determines visibility
Visible Surface Determination: Intro VSD deals with determining what is visible in a scene 2 general approaches are used: 1. Object precision Older approach Designed for vector displays Determines visibility
Hidden-Surface Removal.
 Hidden-Surface emoval. Here we need to discover whether an object is visible or another one obscures it. here are two fundamental approaches to remove the hidden surfaces: ) he object-space approach )
Hidden-Surface emoval. Here we need to discover whether an object is visible or another one obscures it. here are two fundamental approaches to remove the hidden surfaces: ) he object-space approach )
Spatial Data Structures and Speed-Up Techniques. Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology
 Spatial Data Structures and Speed-Up Techniques Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology Spatial data structures What is it? Data structure that organizes
Spatial Data Structures and Speed-Up Techniques Tomas Akenine-Möller Department of Computer Engineering Chalmers University of Technology Spatial data structures What is it? Data structure that organizes
Spatial Data Structures
 Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) [Angel 9.10] Outline Ray tracing review what rays matter? Ray tracing speedup faster
Spatial Data Structures Hierarchical Bounding Volumes Regular Grids Octrees BSP Trees Constructive Solid Geometry (CSG) [Angel 9.10] Outline Ray tracing review what rays matter? Ray tracing speedup faster
Lecture 25 of 41. Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees
 Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Spatial Sorting: Binary Space Partitioning Quadtrees & Octrees William H. Hsu Department of Computing and Information Sciences, KSU KSOL course pages: http://bit.ly/hgvxlh / http://bit.ly/evizre Public
Adaptive Point Cloud Rendering
 1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
1 Adaptive Point Cloud Rendering Project Plan Final Group: May13-11 Christopher Jeffers Eric Jensen Joel Rausch Client: Siemens PLM Software Client Contact: Michael Carter Adviser: Simanta Mitra 4/29/13
Ray Tracing. Outline. Ray Tracing: History
 Foundations of omputer Graphics Online Lecture 9: Ray Tracing 1 History and asic Ray asting Ravi Ramamoorthi Effects needed for Realism (Soft) Shadows Reflections (Mirrors and Glossy) Transparency (Water,
Foundations of omputer Graphics Online Lecture 9: Ray Tracing 1 History and asic Ray asting Ravi Ramamoorthi Effects needed for Realism (Soft) Shadows Reflections (Mirrors and Glossy) Transparency (Water,
Lecture 11: Ray tracing (cont.)
") Interactive Computer Graphics Ray tracing - Summary Lecture 11: Ray tracing (cont.) Graphics Lecture 10: Slide 1 Some slides adopted from H. Pfister, Harvard Graphics Lecture 10: Slide 2 Ray tracing -
Interactive Computer Graphics Ray tracing - Summary Lecture 11: Ray tracing (cont.) Graphics Lecture 10: Slide 1 Some slides adopted from H. Pfister, Harvard Graphics Lecture 10: Slide 2 Ray tracing -
Pipeline Operations. CS 4620 Lecture Steve Marschner. Cornell CS4620 Spring 2018 Lecture 11
 Pipeline Operations CS 4620 Lecture 11 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives to pixels RASTERIZATION
Pipeline Operations CS 4620 Lecture 11 1 Pipeline you are here APPLICATION COMMAND STREAM 3D transformations; shading VERTEX PROCESSING TRANSFORMED GEOMETRY conversion of primitives to pixels RASTERIZATION
The Rendering Pipeline (1)
") The Rendering Pipeline (1) Alessandro Martinelli alessandro.martinelli@unipv.it 30 settembre 2014 The Rendering Pipeline (1) Rendering Architecture First Rendering Pipeline Second Pipeline: Illumination
The Rendering Pipeline (1) Alessandro Martinelli alessandro.martinelli@unipv.it 30 settembre 2014 The Rendering Pipeline (1) Rendering Architecture First Rendering Pipeline Second Pipeline: Illumination
CS 563 Advanced Topics in Computer Graphics QSplat. by Matt Maziarz
 CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and
CS 563 Advanced Topics in Computer Graphics QSplat by Matt Maziarz Outline Previous work in area Background Overview In-depth look File structure Performance Future Point Rendering To save on setup and