Yuichiro Fujimoto, Tomohisa Yamada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato. Nara Institute of Science and Technology, Japan
|
|
|
- Clementine Maxwell
- 5 years ago
- Views:
Transcription




1 Yuichiro Fujimoto, Tomohisa Yamada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and Technology, Japan
2 Designing for product development For developing sales products, it is important to make prototypes and improve product s design. if developers or designers want to change the color or texture of prototypes, they have to remake the prototype. very high cost 918 spyder porsche, 2

3 Projection-based AR for design support This system can change the appearance of the target object without the need of remaking it every time Multiple people can observe the target object simultaneously. J. C. Verlinden, A. d. Smit, A. W. J. Peeters, and M. H. van Gelderen. Development of a flexible augmented prototyping system. In WSCG,
4 Limitation of current system for design support Factors for design Appearance Shape Only the appearance can be changed easily Useful if the shape of the object is able to be changed too Method This is possible if deformable materials can be used to make prototypes. 4




5 Goal and overview of completed system Geometrically-correct projection onto a object which can be reshaped by hand Several projector-camera systems, axes of which are corresponded with each other Target object made of deformable materials (Project with University of South Australia) 5


6 Factor 1. Recognize the local positions on the target object Required factors to achieve geometrically-correct projection Need to take correspondences Factor 2. Appropriate projection by several projector-camera systems Target object Projected image Method to achieve it: Place (retro-reflective) markers which can be detected by an IR-camera on the target object 6




7 Method to recognize the local positions on the object We develop a deformable marker and its recognition Projector + IR-camera Projected texture Deformable marker using retro-reflective materials 7

")
8 Overview of current system For a first step, one projector-camera system is used Instead of using a projector-camera system axes of which were corresponded, gray code patterns were used to take correspondences between a projector and a camera Projector Camera (switchable RGB-to-IR function) Target marker 8



 flat")

9 Required features for new marker Marker 1. Can be recognized partially, because the whole marker can not always be observed 2. Can be recognized even if the marker is bent (by hands) flat Occlusion by Obstacles reshape Partially observed bent 9


10 Related works: Pattern marker Pattern marker which can be recognized as long as a 4 4 grid region is observed Reference pattern 1. Can be recognized partially when the whole marker can not always be observed 2. Can be recognized even if the marker is bent I. Szentandrasi, M. Zacharias, J. Havel, A. Herout, M. Dubska, and R. Kajan. Uniform marker fields: Camera localization by orientable de bruijn tori. In Proceedings of the th IEEE International Symposium on Mixed and Augmented Reality, p. 2. Institute of Electrical and Electronics Engineers,

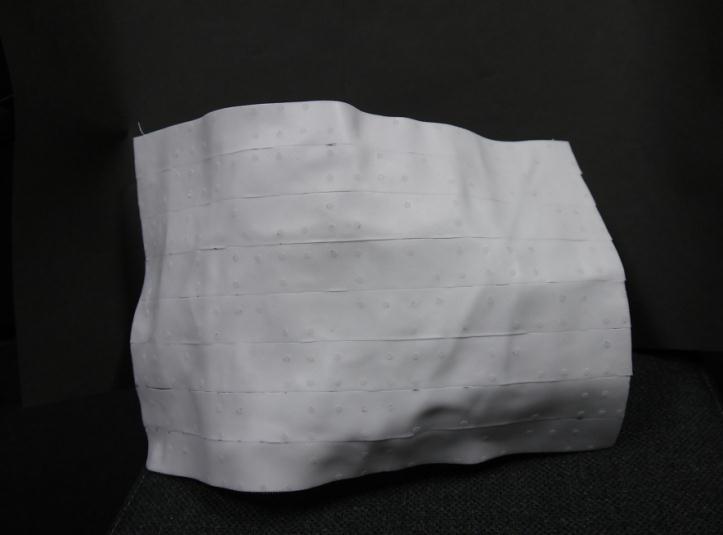
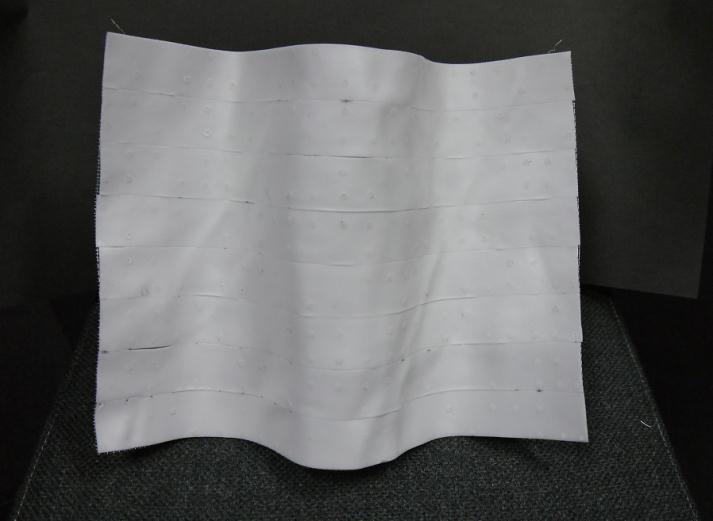
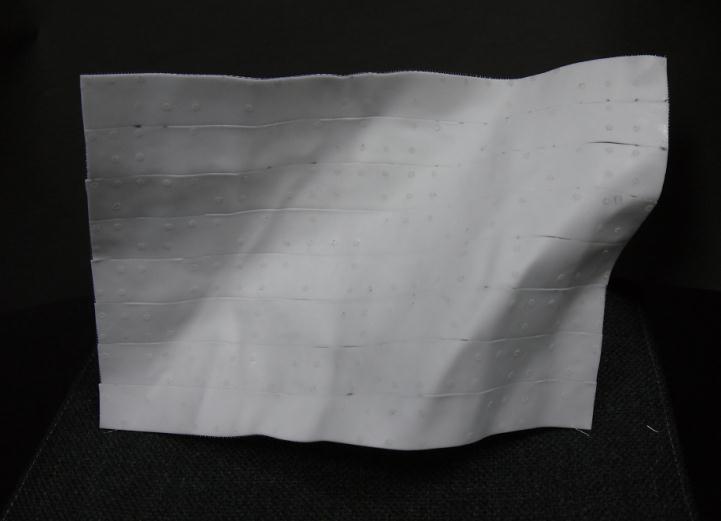
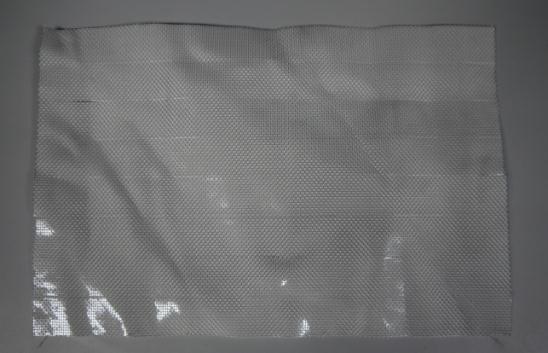

11 Overview of proposed deformable marker The shape of this marker can be easily changed by hand Metal mesh Back side 11

12 ID for each location on the marker Marker has dot patterns (retro-reflective material) Using an IR-camera, these patterns are used as the ID of each location in the marker 12

13 Approach for marker recognition For 2. Can be recognized even if marker is bent Need a new recognition algorithm Plane surface Curved surface It is difficult to acquire the whole shape information using the whole region at one times Divide into small regions, recognize smaller patterns and then merge all 13
14 Flow of marker recognition processes 1.Detect points 2.Divide regions in a hierarchical way 3.Create grids in each segment Problem to be solved (meaning of recognition) Calculate corresponding points on the reference pattern Reference pattern 4.Matching between detected grid points and points on the reference pattern 5. Merge all grids and reject errors Captured image (project a texture onto the marker) 14
15 Each step of recognition (1/4) 1. Detect points 2. Divide regions in a hierarchical way Small segment Large segment 15
16 Each step of recognition(2/4) 3. Create grids in each segment 16

17 Each step of recognition(3/4) 4. Matching between detected grid points and points on the reference pattern A part of detected marker Reference pattern 17

18 Each step of recognition(4/4) 5. Merge all grids and reject errors Point ID in the reference pattern 18

19 Projection results 19



20 Another projection results Projected image 20
 (b) Shape of marker (a) (b) Mean error (mm) 1.8 1.")
21 Accuracy of projection Project grid points (red points) and measure the distance between each projected point to each corresponding retro-reflective point on the marker on the marker. (a) (b) Shape of marker (a) (b) Mean error (mm)
22 Problems and next steps Marker is partially recognized only. Reason 1. Retro-reflective points are not observed on the surface, which normal is oblique toward the light axis of the camera difficult to observe Reason 2. Current marker recognition algorithm is too depend on heuristics How do you decide the size of segment and hierarchal steps? How do you detect detect threshold of voting number to reject error matching between detected points and reference points? 22
23 Goal Summary and future work Geometrically-correct projection onto the material which can be reshaped by hand for design support Method development of a deformable marker and its recognition method Achievement Can project texture images onto the correctly-recognized part of the deformable marker Next step Improving the accuracy of the marker recognition developing how to project by several projector-cameras simultaneously 23
Geometrically-Correct Projection-Based Texture Mapping onto a Deformable Object
 540 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 20, NO. 4, APRIL 2014 Geometrically-Correct Projection-Based Texture Mapping onto a Deformable Object Yuichiro Fujimoto, Ross T. Smith,
540 IEEE TRANSACTIONS ON VISUALIZATION AND COMPUTER GRAPHICS, VOL. 20, NO. 4, APRIL 2014 Geometrically-Correct Projection-Based Texture Mapping onto a Deformable Object Yuichiro Fujimoto, Ross T. Smith,
Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality
 Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality Kazuya Okada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and
Intrinsic and Extrinsic Camera Parameter Estimation with Zoomable Camera for Augmented Reality Kazuya Okada, Takafumi Taketomi, Goshiro Yamamoto, Jun Miyazaki, Hirokazu Kato Nara Institute of Science and
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS
 DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
DETECTION OF 3D POINTS ON MOVING OBJECTS FROM POINT CLOUD DATA FOR 3D MODELING OF OUTDOOR ENVIRONMENTS Tsunetake Kanatani,, Hideyuki Kume, Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Hyogo Prefectural
Local quadrics surface approximation for real-time tracking of textureless 3D rigid curved objects
 Local quadrics surface approximation for real-time tracking of textureless 3D rigid curved objects Marina Atsumi Oikawa, Takafumi Taketomi, Goshiro Yamamoto Nara Institute of Science and Technology, Japan
Local quadrics surface approximation for real-time tracking of textureless 3D rigid curved objects Marina Atsumi Oikawa, Takafumi Taketomi, Goshiro Yamamoto Nara Institute of Science and Technology, Japan
Robotic Perception and Action - Project. Augmented Reality for the Man in the Loop. M. De Cecco - Robotic Perception and Action
 Robotic Perception and Action - Project Augmented Reality for the Man in the Loop Jaakko Hyry, Max Krichenbauer, Goshiro Yamamoto, Takafumi Taketomi, Christian Sandor, Hirokazu Kato, Petri Pulli, Design
Robotic Perception and Action - Project Augmented Reality for the Man in the Loop Jaakko Hyry, Max Krichenbauer, Goshiro Yamamoto, Takafumi Taketomi, Christian Sandor, Hirokazu Kato, Petri Pulli, Design
Localization of Wearable Users Using Invisible Retro-reflective Markers and an IR Camera
 Localization of Wearable Users Using Invisible Retro-reflective Markers and an IR Camera Yusuke Nakazato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science
Localization of Wearable Users Using Invisible Retro-reflective Markers and an IR Camera Yusuke Nakazato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute of Science
Augmented Reality of Robust Tracking with Realistic Illumination 1
 International Journal of Fuzzy Logic and Intelligent Systems, vol. 10, no. 3, June 2010, pp. 178-183 DOI : 10.5391/IJFIS.2010.10.3.178 Augmented Reality of Robust Tracking with Realistic Illumination 1
International Journal of Fuzzy Logic and Intelligent Systems, vol. 10, no. 3, June 2010, pp. 178-183 DOI : 10.5391/IJFIS.2010.10.3.178 Augmented Reality of Robust Tracking with Realistic Illumination 1
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor
 AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
AR Cultural Heritage Reconstruction Based on Feature Landmark Database Constructed by Using Omnidirectional Range Sensor Takafumi Taketomi, Tomokazu Sato, and Naokazu Yokoya Graduate School of Information
Detection of surfaces for projection of texture
 Detection of surfaces for projection of texture Thierry Molinier a, David Fofi a, Patrick Gorria a, Joaquim Salvi b a Le2i UMR CNRS 5158, University of Burgundy, France b Computer Vision and Robotics Group,
Detection of surfaces for projection of texture Thierry Molinier a, David Fofi a, Patrick Gorria a, Joaquim Salvi b a Le2i UMR CNRS 5158, University of Burgundy, France b Computer Vision and Robotics Group,
Appearance Control in Dynamic Light Environments with a Projector-Camera System
 Appearance Control in Dynamic Light Environments with a Projector-Camera System Ryo Akiyama Takafumi Taketomi Goshiro Yamamoto Christian Sandor Toshiyuki Amano Wakayama University Hirokazu Kato ABSTRACT
Appearance Control in Dynamic Light Environments with a Projector-Camera System Ryo Akiyama Takafumi Taketomi Goshiro Yamamoto Christian Sandor Toshiyuki Amano Wakayama University Hirokazu Kato ABSTRACT
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
A Stereo Vision-based Mixed Reality System with Natural Feature Point Tracking
 A Stereo Vision-based Mixed Reality System with Natural Feature Point Tracking Masayuki Kanbara y, Hirofumi Fujii z, Haruo Takemura y and Naokazu Yokoya y ygraduate School of Information Science, Nara
A Stereo Vision-based Mixed Reality System with Natural Feature Point Tracking Masayuki Kanbara y, Hirofumi Fujii z, Haruo Takemura y and Naokazu Yokoya y ygraduate School of Information Science, Nara
Mapping textures on 3D geometric model using reflectance image
 Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Mapping textures on 3D geometric model using reflectance image Ryo Kurazume M. D. Wheeler Katsushi Ikeuchi The University of Tokyo Cyra Technologies, Inc. The University of Tokyo fkurazume,kig@cvl.iis.u-tokyo.ac.jp
Project report Augmented reality with ARToolKit
 Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
Project report Augmented reality with ARToolKit FMA175 Image Analysis, Project Mathematical Sciences, Lund Institute of Technology Supervisor: Petter Strandmark Fredrik Larsson (dt07fl2@student.lth.se)
An Initialization Tool for Installing Visual Markers in Wearable Augmented Reality
 An Initialization Tool for Installing Visual Markers in Wearable Augmented Reality Yusuke Nakazato, Masayuki Kanbara, and Naokazu Yokoya Nara Institute of Science and Technology, 8916 5 Takayama, Ikoma,
An Initialization Tool for Installing Visual Markers in Wearable Augmented Reality Yusuke Nakazato, Masayuki Kanbara, and Naokazu Yokoya Nara Institute of Science and Technology, 8916 5 Takayama, Ikoma,
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera
 Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
Dense 3-D Reconstruction of an Outdoor Scene by Hundreds-baseline Stereo Using a Hand-held Video Camera Tomokazu Satoy, Masayuki Kanbaray, Naokazu Yokoyay and Haruo Takemuraz ygraduate School of Information
EASY PROJECTOR AND MONOCHROME CAMERA CALIBRATION METHOD USING PLANE BOARD WITH MULTIPLE ENCODED MARKERS
 EASY PROJECTOR AND MONOCHROME CAMERA CALIBRATION METHOD USING PLANE BOARD WITH MULTIPLE ENCODED MARKERS Tatsuya Hanayama 1 Shota Kiyota 1 Ryo Furukawa 3 Hiroshi Kawasaki 1 1 Faculty of Engineering, Kagoshima
EASY PROJECTOR AND MONOCHROME CAMERA CALIBRATION METHOD USING PLANE BOARD WITH MULTIPLE ENCODED MARKERS Tatsuya Hanayama 1 Shota Kiyota 1 Ryo Furukawa 3 Hiroshi Kawasaki 1 1 Faculty of Engineering, Kagoshima
Augmented reality with the ARToolKit FMA175 version 1.3 Supervisor Petter Strandmark By Olle Landin
 Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Augmented reality with the ARToolKit FMA75 version.3 Supervisor Petter Strandmark By Olle Landin Ic7ol3@student.lth.se Introduction Agumented Reality (AR) is the overlay of virtual computer graphics images
Live Video Integration for High Presence Virtual World
 Live Video Integration for High Presence Virtual World Tetsuro OGI, Toshio YAMADA Gifu MVL Research Center, TAO IML, The University of Tokyo 2-11-16, Yayoi, Bunkyo-ku, Tokyo 113-8656, Japan Michitaka HIROSE
Live Video Integration for High Presence Virtual World Tetsuro OGI, Toshio YAMADA Gifu MVL Research Center, TAO IML, The University of Tokyo 2-11-16, Yayoi, Bunkyo-ku, Tokyo 113-8656, Japan Michitaka HIROSE
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
MR-Mirror: A Complex of Real and Virtual Mirrors
 MR-Mirror: A Complex of Real and Virtual Mirrors Hideaki Sato 1, Itaru Kitahara 1, and Yuichi Ohta 1 1 Department of Intelligent Interaction Technologies, Graduate School of Systems and Information Engineering,
MR-Mirror: A Complex of Real and Virtual Mirrors Hideaki Sato 1, Itaru Kitahara 1, and Yuichi Ohta 1 1 Department of Intelligent Interaction Technologies, Graduate School of Systems and Information Engineering,
Job Title: Apply and Edit Modifiers. Objective:
 Job No: 06 Duration: 16H Job Title: Apply and Edit Modifiers Objective: To understand that a modifier can be applied to a 2D shape to turn it into a 3D object, and that the modifier s parameters can be
Job No: 06 Duration: 16H Job Title: Apply and Edit Modifiers Objective: To understand that a modifier can be applied to a 2D shape to turn it into a 3D object, and that the modifier s parameters can be
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Virtual Reality Model of Koumokuten Generated from Measurement
 Virtual Reality Model of Koumokuten Generated from Measurement Hiroki UNTEN Graduate School of Information Science and Technology The University of Tokyo unten@cvl.iis.u-tokyo.ac.jp Katsushi IKEUCHI Graduate
Virtual Reality Model of Koumokuten Generated from Measurement Hiroki UNTEN Graduate School of Information Science and Technology The University of Tokyo unten@cvl.iis.u-tokyo.ac.jp Katsushi IKEUCHI Graduate
Computation of Three-Dimensional Electromagnetic Fields for an Augmented Reality Environment
 Excerpt from the Proceedings of the COMSOL Conference 2008 Hannover Computation of Three-Dimensional Electromagnetic Fields for an Augmented Reality Environment André Buchau 1 * and Wolfgang M. Rucker
Excerpt from the Proceedings of the COMSOL Conference 2008 Hannover Computation of Three-Dimensional Electromagnetic Fields for an Augmented Reality Environment André Buchau 1 * and Wolfgang M. Rucker
Hybrid SURF-Golay Marker Detection Method for Augmented Reality Applications
 Hybrid SURF-Golay Marker Detection Method for Augmented Reality Applications David Prochazka, Ondrej Popelka, Tomas Koubek, Jaromir Landa, Jan Kolomaznik Mendel University in Brno Zemedelska 1 61300, Brno,
Hybrid SURF-Golay Marker Detection Method for Augmented Reality Applications David Prochazka, Ondrej Popelka, Tomas Koubek, Jaromir Landa, Jan Kolomaznik Mendel University in Brno Zemedelska 1 61300, Brno,
Wide area tracking method for augmented reality supporting nuclear power plant maintenance work
 Journal of Marine Science and Application, Vol.6, No.1, January 2006, PP***-*** Wide area tracking method for augmented reality supporting nuclear power plant maintenance work ISHII Hirotake 1, YAN Weida
Journal of Marine Science and Application, Vol.6, No.1, January 2006, PP***-*** Wide area tracking method for augmented reality supporting nuclear power plant maintenance work ISHII Hirotake 1, YAN Weida
Robust Global Tracking using a Seamless Structured Pattern of Dots
 Robust Global Tracking using a Seamless Structured Pattern of Dots Lode Jorissen, Steven Maesen, Ashish Doshi, Philippe Bekaert Hasselt University - tul - iminds Expertise Centre for Digital Media - Wetenschapspark
Robust Global Tracking using a Seamless Structured Pattern of Dots Lode Jorissen, Steven Maesen, Ashish Doshi, Philippe Bekaert Hasselt University - tul - iminds Expertise Centre for Digital Media - Wetenschapspark
3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS
 3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS Dorian Garcia, Jean-José Orteu École des Mines d Albi, F-81013 ALBI CT Cedex 09, France Dorian.Garcia@enstimac.fr,
3D DEFORMATION MEASUREMENT USING STEREO- CORRELATION APPLIED TO EXPERIMENTAL MECHANICS Dorian Garcia, Jean-José Orteu École des Mines d Albi, F-81013 ALBI CT Cedex 09, France Dorian.Garcia@enstimac.fr,
Automated Detection of Human for Visual Surveillance System
 Automated Detection of Human for Visual Surveillance System Yuji KUNO, Takahiro WATANABE, Yoshinori SHIMOSAKODA, and Satoshi NAKAGAWA Kansai Laboratory, Oki Electric Industry Co., Ltd., 2-27 Shiromi 1-chome,
Automated Detection of Human for Visual Surveillance System Yuji KUNO, Takahiro WATANABE, Yoshinori SHIMOSAKODA, and Satoshi NAKAGAWA Kansai Laboratory, Oki Electric Industry Co., Ltd., 2-27 Shiromi 1-chome,
Estimating Camera Position And Posture by Using Feature Landmark Database
 Estimating Camera Position And Posture by Using Feature Landmark Database Motoko Oe 1, Tomokazu Sato 2 and Naokazu Yokoya 2 1 IBM Japan 2 Nara Institute of Science and Technology, Japan Abstract. Estimating
Estimating Camera Position And Posture by Using Feature Landmark Database Motoko Oe 1, Tomokazu Sato 2 and Naokazu Yokoya 2 1 IBM Japan 2 Nara Institute of Science and Technology, Japan Abstract. Estimating
CURVE SKETCHING EXAM QUESTIONS
 CURVE SKETCHING EXAM QUESTIONS Question 1 (**) a) Express f ( x ) in the form ( ) 2 f x = x + 6x + 10, x R. f ( x) = ( x + a) 2 + b, where a and b are integers. b) Describe geometrically the transformations
CURVE SKETCHING EXAM QUESTIONS Question 1 (**) a) Express f ( x ) in the form ( ) 2 f x = x + 6x + 10, x R. f ( x) = ( x + a) 2 + b, where a and b are integers. b) Describe geometrically the transformations
An Automatic Hole Filling Method of Point Cloud for 3D Scanning
 An Automatic Hole Filling Method of Point Cloud for 3D Scanning Yuta MURAKI Osaka Institute of Technology Osaka, Japan yuta.muraki@oit.ac.jp Koji NISHIO Osaka Institute of Technology Osaka, Japan koji.a.nishio@oit.ac.jp
An Automatic Hole Filling Method of Point Cloud for 3D Scanning Yuta MURAKI Osaka Institute of Technology Osaka, Japan yuta.muraki@oit.ac.jp Koji NISHIO Osaka Institute of Technology Osaka, Japan koji.a.nishio@oit.ac.jp
Optical Flow-Based Person Tracking by Multiple Cameras
 Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Proc. IEEE Int. Conf. on Multisensor Fusion and Integration in Intelligent Systems, Baden-Baden, Germany, Aug. 2001. Optical Flow-Based Person Tracking by Multiple Cameras Hideki Tsutsui, Jun Miura, and
Chapter 5. Projections and Rendering
 Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Chapter 5 Projections and Rendering Topics: Perspective Projections The rendering pipeline In order to view manipulate and view a graphics object we must find ways of storing it a computer-compatible way.
Single Image Camera Calibration with Lenticular Arrays for Augmented Reality
 Single Image Camera Calibration with Lenticular Arrays for Augmented Reality Ian Schillebeeckx Washington University in St. Louis 1 Brookings Dr, St. Louis, MO 63130 ischillebeeckx@wustl.edu Robert Pless
Single Image Camera Calibration with Lenticular Arrays for Augmented Reality Ian Schillebeeckx Washington University in St. Louis 1 Brookings Dr, St. Louis, MO 63130 ischillebeeckx@wustl.edu Robert Pless
Peg-Free Hand Geometry Verification System
 Peg-Free Hand Geometry Verification System Pavan K Rudravaram Venu Govindaraju Center for Unified Biometrics and Sensors (CUBS), University at Buffalo,New York,USA. {pkr, govind} @cedar.buffalo.edu http://www.cubs.buffalo.edu
Peg-Free Hand Geometry Verification System Pavan K Rudravaram Venu Govindaraju Center for Unified Biometrics and Sensors (CUBS), University at Buffalo,New York,USA. {pkr, govind} @cedar.buffalo.edu http://www.cubs.buffalo.edu
CS4495/6495 Introduction to Computer Vision
 CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
CS4495/6495 Introduction to Computer Vision 9C-L1 3D perception Some slides by Kelsey Hawkins Motivation Why do animals, people & robots need vision? To detect and recognize objects/landmarks Is that a
Real-Time Geometric Registration Using Feature Landmark Database for Augmented Reality Applications
 Real-Time Geometric Registration Using Feature Landmark Database for Augmented Reality Applications Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Real-Time Geometric Registration Using Feature Landmark Database for Augmented Reality Applications Takafumi Taketomi, Tomokazu Sato and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Human Body Measurement by Digital Photogrammetry System
 Human Body Measurement by Digital Photogrammetry System Nobuo KOCHI*, Kazuo KITAMURA, Hiroto WATANABE, Takayuki NOMA, Mitsuharu YAMADA Imaging and Measuring Laboratory, R&D Center, Topcon Corporation,
Human Body Measurement by Digital Photogrammetry System Nobuo KOCHI*, Kazuo KITAMURA, Hiroto WATANABE, Takayuki NOMA, Mitsuharu YAMADA Imaging and Measuring Laboratory, R&D Center, Topcon Corporation,
Projection Center Calibration for a Co-located Projector Camera System
 Projection Center Calibration for a Co-located Camera System Toshiyuki Amano Department of Computer and Communication Science Faculty of Systems Engineering, Wakayama University Sakaedani 930, Wakayama,
Projection Center Calibration for a Co-located Camera System Toshiyuki Amano Department of Computer and Communication Science Faculty of Systems Engineering, Wakayama University Sakaedani 930, Wakayama,
High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images
 MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
MECATRONICS - REM 2016 June 15-17, 2016 High-speed Three-dimensional Mapping by Direct Estimation of a Small Motion Using Range Images Shinta Nozaki and Masashi Kimura School of Science and Engineering
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Structured Light. Tobias Nöll Thanks to Marc Pollefeys, David Nister and David Lowe
 Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Structured Light Tobias Nöll tobias.noell@dfki.de Thanks to Marc Pollefeys, David Nister and David Lowe Introduction Previous lecture: Dense reconstruction Dense matching of non-feature pixels Patch-based
Computers & Graphics
 Computers & Graphics 35 (2011) 768 777 Contents lists available at ScienceDirect Computers & Graphics journal homepage: www.elsevier.com/locate/cag Mobile Augmented Reality Real-time and accurate extrinsic
Computers & Graphics 35 (2011) 768 777 Contents lists available at ScienceDirect Computers & Graphics journal homepage: www.elsevier.com/locate/cag Mobile Augmented Reality Real-time and accurate extrinsic
FRED Display Application Note
 FRED Display Application Note Most displays consist of several optical components. The most important component is the source of light that illuminates the display. All displays need a mechanism to send
FRED Display Application Note Most displays consist of several optical components. The most important component is the source of light that illuminates the display. All displays need a mechanism to send
Simple and Robust Tracking of Hands and Objects for Video-based Multimedia Production
 Simple and Robust Tracking of Hands and Objects for Video-based Multimedia Production Masatsugu ITOH Motoyuki OZEKI Yuichi NAKAMURA Yuichi OHTA Institute of Engineering Mechanics and Systems University
Simple and Robust Tracking of Hands and Objects for Video-based Multimedia Production Masatsugu ITOH Motoyuki OZEKI Yuichi NAKAMURA Yuichi OHTA Institute of Engineering Mechanics and Systems University
3DCITY. Spatial Mapping and Holographic Tools for 3D Data Acquisition and Visualization of Underground Infrastructure Networks
 3DCITY Spatial Mapping and Holographic Tools for 3D Data Acquisition and Visualization of Underground Infrastructure Networks CONTENT 1. 3DCITY Project 2. Geolocation 3. Spatial Mapping 4. MR Visualization
3DCITY Spatial Mapping and Holographic Tools for 3D Data Acquisition and Visualization of Underground Infrastructure Networks CONTENT 1. 3DCITY Project 2. Geolocation 3. Spatial Mapping 4. MR Visualization
Surface Registration. Gianpaolo Palma
 Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
Surface Registration Gianpaolo Palma The problem 3D scanning generates multiple range images Each contain 3D points for different parts of the model in the local coordinates of the scanner Find a rigid
CITS 4402 Computer Vision
 CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
CITS 4402 Computer Vision Prof Ajmal Mian Lecture 12 3D Shape Analysis & Matching Overview of this lecture Revision of 3D shape acquisition techniques Representation of 3D data Applying 2D image techniques
3D Modeling of Objects Using Laser Scanning
 1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
1 3D Modeling of Objects Using Laser Scanning D. Jaya Deepu, LPU University, Punjab, India Email: Jaideepudadi@gmail.com Abstract: In the last few decades, constructing accurate three-dimensional models
SketchUp. SketchUp. Google SketchUp. Using SketchUp. The Tool Set
 Google Google is a 3D Modelling program which specialises in making computer generated representations of real-world objects, especially architectural, mechanical and building components, such as windows,
Google Google is a 3D Modelling program which specialises in making computer generated representations of real-world objects, especially architectural, mechanical and building components, such as windows,
Deformable 3D Reconstruction with an Object Database
 Pablo F. Alcantarilla and Adrien Bartoli BMVC 2012 1 of 22 Pablo F. Alcantarilla and Adrien Bartoli ISIT-UMR 6284 CNRS, Université d Auvergne, Clermont Ferrand, France BMVC 2012, Guildford, UK Pablo F.
Pablo F. Alcantarilla and Adrien Bartoli BMVC 2012 1 of 22 Pablo F. Alcantarilla and Adrien Bartoli ISIT-UMR 6284 CNRS, Université d Auvergne, Clermont Ferrand, France BMVC 2012, Guildford, UK Pablo F.
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
MODERN DIMENSIONAL MEASURING TECHNIQUES BASED ON OPTICAL PRINCIPLES
 MODERN DIMENSIONAL MEASURING TECHNIQUES BASED ON OPTICAL PRINCIPLES J. Reichweger 1, J. Enzendorfer 1 and E. Müller 2 1 Steyr Daimler Puch Engineering Center Steyr GmbH Schönauerstrasse 5, A-4400 Steyr,
MODERN DIMENSIONAL MEASURING TECHNIQUES BASED ON OPTICAL PRINCIPLES J. Reichweger 1, J. Enzendorfer 1 and E. Müller 2 1 Steyr Daimler Puch Engineering Center Steyr GmbH Schönauerstrasse 5, A-4400 Steyr,
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Geometric Hashing. Overview (1) Overview (2) Reference Frames. Recognition under Similarity Transformations. Feb Goo Jun
 Overview (2) Reference Frames. Recognition under Similarity Transformations. Feb Goo Jun") Geometric Hashing Feb. 27. 2007 Goo Jun Overview (1) Origins of Geometric Hashing Developed as a solution to computer vision problem Find common substructures in a scene regardless of rotation, translation,
Geometric Hashing Feb. 27. 2007 Goo Jun Overview (1) Origins of Geometric Hashing Developed as a solution to computer vision problem Find common substructures in a scene regardless of rotation, translation,
Augmented interiors with digital camera images
 PAPER VI Augmented interiors with digital camera images In: Piekarski, W. (Ed.) 7th Australasian User Interface Conference (AUIC); CRPIT. Vol. 50. ACS. Pp. 33 36. Copyright 2006 ACS. Reprinted with permission
PAPER VI Augmented interiors with digital camera images In: Piekarski, W. (Ed.) 7th Australasian User Interface Conference (AUIC); CRPIT. Vol. 50. ACS. Pp. 33 36. Copyright 2006 ACS. Reprinted with permission
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond
 High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
High-Fidelity Augmented Reality Interactions Hrvoje Benko Researcher, MSR Redmond New generation of interfaces Instead of interacting through indirect input devices (mice and keyboard), the user is interacting
A 3-D Scanner Capturing Range and Color for the Robotics Applications
 J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
J.Haverinen & J.Röning, A 3-D Scanner Capturing Range and Color for the Robotics Applications, 24th Workshop of the AAPR - Applications of 3D-Imaging and Graph-based Modeling, May 25-26, Villach, Carinthia,
Computer Graphics II
 Computer Graphics II Autumn 2018-2019 Outline 1 Transformations Outline Transformations 1 Transformations Orthogonal Projections Suppose we want to project a point x onto a plane given by its unit-length
Computer Graphics II Autumn 2018-2019 Outline 1 Transformations Outline Transformations 1 Transformations Orthogonal Projections Suppose we want to project a point x onto a plane given by its unit-length
Marco Cavallo Riverwalk: Incorporating Historical Photographs in Public Outdoor Augmented Reality Experiences
 Marco Cavallo Riverwalk: Incorporating Historical Photographs in Public Outdoor Augmented Reality Experiences First of all some discussions about terminology used could be done, but for now we will stick
Marco Cavallo Riverwalk: Incorporating Historical Photographs in Public Outdoor Augmented Reality Experiences First of all some discussions about terminology used could be done, but for now we will stick
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
PHOTOGRAMMETRIC TECHNIQUE FOR TEETH OCCLUSION ANALYSIS IN DENTISTRY
 PHOTOGRAMMETRIC TECHNIQUE FOR TEETH OCCLUSION ANALYSIS IN DENTISTRY V. A. Knyaz a, *, S. Yu. Zheltov a, a State Research Institute of Aviation System (GosNIIAS), 539 Moscow, Russia (knyaz,zhl)@gosniias.ru
PHOTOGRAMMETRIC TECHNIQUE FOR TEETH OCCLUSION ANALYSIS IN DENTISTRY V. A. Knyaz a, *, S. Yu. Zheltov a, a State Research Institute of Aviation System (GosNIIAS), 539 Moscow, Russia (knyaz,zhl)@gosniias.ru
Projector and Camera Calibration Method for Oneshot Scan System with Static Pattern Projector and Monochrome Camera
 IIEEJ Paper Projector and Camera Calibration Method for Oneshot Scan System with Static Pattern Projector and Monochrome Camera Hiroshi KAWASAKI (Member), Shota KIYOTA, Tatsuya HANAYAMA, Michihiro MIKAMO
IIEEJ Paper Projector and Camera Calibration Method for Oneshot Scan System with Static Pattern Projector and Monochrome Camera Hiroshi KAWASAKI (Member), Shota KIYOTA, Tatsuya HANAYAMA, Michihiro MIKAMO
Shape Modeling of A String And Recognition Using Distance Sensor
 Proceedings of the 24th IEEE International Symposium on Robot and Human Interactive Communication Kobe, Japan, Aug 31 - Sept 4, 2015 Shape Modeling of A String And Recognition Using Distance Sensor Keisuke
Proceedings of the 24th IEEE International Symposium on Robot and Human Interactive Communication Kobe, Japan, Aug 31 - Sept 4, 2015 Shape Modeling of A String And Recognition Using Distance Sensor Keisuke
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA
 TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
TEXTURE OVERLAY ONTO NON-RIGID SURFACE USING COMMODITY DEPTH CAMERA Tomoki Hayashi 1, Francois de Sorbier 1 and Hideo Saito 1 1 Graduate School of Science and Technology, Keio University, 3-14-1 Hiyoshi,
Computational Foundations of Cognitive Science
 Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization
 Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
Room Reconstruction from a Single Spherical Image by Higher-order Energy Minimization Kosuke Fukano, Yoshihiko Mochizuki, Satoshi Iizuka, Edgar Simo-Serra, Akihiro Sugimoto, and Hiroshi Ishikawa Waseda
2 OVERVIEW OF RELATED WORK
 Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Utsushi SAKAI Jun OGATA This paper presents a pedestrian detection system based on the fusion of sensors for LIDAR and convolutional neural network based image classification. By using LIDAR our method
Task analysis based on observing hands and objects by vision
 Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Task analysis based on observing hands and objects by vision Yoshihiro SATO Keni Bernardin Hiroshi KIMURA Katsushi IKEUCHI Univ. of Electro-Communications Univ. of Karlsruhe Univ. of Tokyo Abstract In
Gesture-Based 3D Mesh Modeler
 Gesture-Based 3D Mesh Modeler Roland Carlos 1, Clarence Dalan 1, Aaron Sanchez 1, Kevin Tolentino 1 and Florante R. Salvador 1, * 1De La Salle University, Manila *Corresponding Author: florante.salvador@dlsu.edu.ph
Gesture-Based 3D Mesh Modeler Roland Carlos 1, Clarence Dalan 1, Aaron Sanchez 1, Kevin Tolentino 1 and Florante R. Salvador 1, * 1De La Salle University, Manila *Corresponding Author: florante.salvador@dlsu.edu.ph
SEOUL NATIONAL UNIVERSITY
 Fashion Technology 3. Pattern Design Sungmin Kim SEOUL NATIONAL UNIVERSITY Design Process Overview Concept Design Fabric Design Scalable vector graphics Feature-based design Weave CAD 2.5D Mapping Design
Fashion Technology 3. Pattern Design Sungmin Kim SEOUL NATIONAL UNIVERSITY Design Process Overview Concept Design Fabric Design Scalable vector graphics Feature-based design Weave CAD 2.5D Mapping Design
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Corner Detection from Room Environment Using the Handy Video Camera
 3D Corner Detection from Room Environment Using the Handy Video Camera Ryo HIROSE, Hideo SAITO and Masaaki MOCHIMARU : Graduated School of Science and Technology, Keio University, Japan {ryo, saito}@ozawa.ics.keio.ac.jp
3D Corner Detection from Room Environment Using the Handy Video Camera Ryo HIROSE, Hideo SAITO and Masaaki MOCHIMARU : Graduated School of Science and Technology, Keio University, Japan {ryo, saito}@ozawa.ics.keio.ac.jp
Journal of Advanced Mechanical Design, Systems, and Manufacturing
 Note on Tangible Interaction Using Paper Models for AR-Based Design Evaluation* Hyungjun PARK**, Sang-Jin PARK** and Ho-Kyun JUNG** ** Department of Industrial Engineering, Chosun University 375 Seosuk-Dong,
Note on Tangible Interaction Using Paper Models for AR-Based Design Evaluation* Hyungjun PARK**, Sang-Jin PARK** and Ho-Kyun JUNG** ** Department of Industrial Engineering, Chosun University 375 Seosuk-Dong,
Chapter 3 Image Registration. Chapter 3 Image Registration
 Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Chapter 3 Image Registration Distributed Algorithms for Introduction (1) Definition: Image Registration Input: 2 images of the same scene but taken from different perspectives Goal: Identify transformation
Avatar Communication: Virtual Instructor in the Demonstration Exhibit
 Avatar Communication: Virtual Instructor in the Demonstration Exhibit Tetsuro Ogi 1, 2, 3, Toshio Yamada 1, Takuro Kayahara 1, 2, Yuji Kurita 1 1 Telecommunications Advancement Organization of Japan 2
Avatar Communication: Virtual Instructor in the Demonstration Exhibit Tetsuro Ogi 1, 2, 3, Toshio Yamada 1, Takuro Kayahara 1, 2, Yuji Kurita 1 1 Telecommunications Advancement Organization of Japan 2
CPSC / Sonny Chan - University of Calgary. Collision Detection II
 CPSC 599.86 / 601.86 Sonny Chan - University of Calgary Collision Detection II Outline Broad phase collision detection: - Problem definition and motivation - Bounding volume hierarchies - Spatial partitioning
CPSC 599.86 / 601.86 Sonny Chan - University of Calgary Collision Detection II Outline Broad phase collision detection: - Problem definition and motivation - Bounding volume hierarchies - Spatial partitioning
Automatic generation of 3-d building models from multiple bounded polygons
 icccbe 2010 Nottingham University Press Proceedings of the International Conference on Computing in Civil and Building Engineering W Tizani (Editor) Automatic generation of 3-d building models from multiple
icccbe 2010 Nottingham University Press Proceedings of the International Conference on Computing in Civil and Building Engineering W Tizani (Editor) Automatic generation of 3-d building models from multiple
Single Camera Calibration
 Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
Single Camera Calibration using Partially Visible Calibration Objects Based on Random Dots Marker Tracking Algorithm *Yuji Oyamada1,2, Pascal Fallavollita2, and Nassir Navab2 1. Keio University, Japan
IMAGE-BASED RENDERING
 IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
IMAGE-BASED RENDERING 1. What is Image-Based Rendering? - The synthesis of new views of a scene from pre-recorded pictures.!"$#% "'&( )*+,-/.). #0 1 ' 2"&43+5+, 2. Why? (1) We really enjoy visual magic!
Real-Time Cooperative Multi-Target.
 Title Real-Time Cooperative Multi-Target Communicating Active Vision Agents( Author(s) Ukita, Norimichi Citation Kyoto University ( 京都大学 ) Issue Date 2001-09-25 URL https://doi.org/10.14989/doctor.k91
Title Real-Time Cooperative Multi-Target Communicating Active Vision Agents( Author(s) Ukita, Norimichi Citation Kyoto University ( 京都大学 ) Issue Date 2001-09-25 URL https://doi.org/10.14989/doctor.k91
ECS 175 COMPUTER GRAPHICS. Ken Joy.! Winter 2014
 ECS 175 COMPUTER GRAPHICS Ken Joy Winter 2014 Shading To be able to model shading, we simplify Uniform Media no scattering of light Opaque Objects No Interreflection Point Light Sources RGB Color (eliminating
ECS 175 COMPUTER GRAPHICS Ken Joy Winter 2014 Shading To be able to model shading, we simplify Uniform Media no scattering of light Opaque Objects No Interreflection Point Light Sources RGB Color (eliminating
VISUAL NAVIGATION SYSTEM ON WINDSHIELD HEAD-UP DISPLAY
 VISUAL NAVIGATION SYSTEM ON WINDSHIELD HEAD-UP DISPLAY Akihiko SATO *, Itaru KITAHARA, Yoshinari KAMEDA, Yuichi OHTA Department of Intelligent Interaction Technologies, Graduate School of Systems and Information
VISUAL NAVIGATION SYSTEM ON WINDSHIELD HEAD-UP DISPLAY Akihiko SATO *, Itaru KITAHARA, Yoshinari KAMEDA, Yuichi OHTA Department of Intelligent Interaction Technologies, Graduate School of Systems and Information
Scalar Field Visualization I
 Scalar Field Visualization I What is a Scalar Field? The approximation of certain scalar function in space f(x,y,z). Image source: blimpyb.com f What is a Scalar Field? The approximation of certain scalar
Scalar Field Visualization I What is a Scalar Field? The approximation of certain scalar function in space f(x,y,z). Image source: blimpyb.com f What is a Scalar Field? The approximation of certain scalar
Using the CMA Warp Editor
 Using the CMA Warp Editor Overview The Warp Editor feature lets you adjust Axon HD, Axon HD Pro, DLHD or MMS100 output to match complex projection surfaces. These forms allow the projection to match irregular
Using the CMA Warp Editor Overview The Warp Editor feature lets you adjust Axon HD, Axon HD Pro, DLHD or MMS100 output to match complex projection surfaces. These forms allow the projection to match irregular
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
Problem definition Image acquisition Image segmentation Connected component analysis. Machine vision systems - 1
 Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
Machine vision systems Problem definition Image acquisition Image segmentation Connected component analysis Machine vision systems - 1 Problem definition Design a vision system to see a flat world Page
JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION
 Gexcel JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION In this tutorial you will learn how to Include in the project external digital pictures of the scene you are modeling Calculate the original
Gexcel JRC 3D Reconstructor CAMERA CALIBRATION & ORIENTATION In this tutorial you will learn how to Include in the project external digital pictures of the scene you are modeling Calculate the original
MR-Guided Mixed Reality for Breast Conserving Surgical Planning
 MR-Guided Mixed Reality for Breast Conserving Surgical Planning Suba Srinivasan (subashini7@gmail.com) March 30 th 2017 Mentors: Prof. Brian A. Hargreaves, Prof. Bruce L. Daniel MEDICINE MRI Guided Mixed
MR-Guided Mixed Reality for Breast Conserving Surgical Planning Suba Srinivasan (subashini7@gmail.com) March 30 th 2017 Mentors: Prof. Brian A. Hargreaves, Prof. Bruce L. Daniel MEDICINE MRI Guided Mixed
Landmark Detection on 3D Face Scans by Facial Model Registration
 Landmark Detection on 3D Face Scans by Facial Model Registration Tristan Whitmarsh 1, Remco C. Veltkamp 2, Michela Spagnuolo 1 Simone Marini 1, Frank ter Haar 2 1 IMATI-CNR, Genoa, Italy 2 Dept. Computer
Landmark Detection on 3D Face Scans by Facial Model Registration Tristan Whitmarsh 1, Remco C. Veltkamp 2, Michela Spagnuolo 1 Simone Marini 1, Frank ter Haar 2 1 IMATI-CNR, Genoa, Italy 2 Dept. Computer
A Fast and Stable Approach for Restoration of Warped Document Images
 A Fast and Stable Approach for Restoration of Warped Document Images Kok Beng Chua, Li Zhang, Yu Zhang and Chew Lim Tan School of Computing, National University of Singapore 3 Science Drive 2, Singapore
A Fast and Stable Approach for Restoration of Warped Document Images Kok Beng Chua, Li Zhang, Yu Zhang and Chew Lim Tan School of Computing, National University of Singapore 3 Science Drive 2, Singapore
A Wearable Augmented Reality System Using an IrDA Device and a Passometer
 A Wearable Augmented Reality System Using an IrDA Device and a Passometer Ryuhei Tenmoku a Masayuki Kanbara a and Naokazu Yokoya a a Graduate School of Information Science, Nara Institute of Science and
A Wearable Augmented Reality System Using an IrDA Device and a Passometer Ryuhei Tenmoku a Masayuki Kanbara a and Naokazu Yokoya a a Graduate School of Information Science, Nara Institute of Science and
New Sony DepthSense TM ToF Technology
 ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting
ADVANCED MATERIAL HANDLING WITH New Sony DepthSense TM ToF Technology Jenson Chang Product Marketing November 7, 2018 1 3D SENSING APPLICATIONS Pick and Place Drones Collision Detection People Counting