Sequential Constructiveness, SCL and SCCharts
|
|
|
- Lionel Taylor
- 5 years ago
- Views:
Transcription
1 Sequential Constructiveness, SCL and SCCharts Incorporating synchrony in conventional languages Reinhard von Hanxleden (U Kiel) 14 March 2018, Collège de France
2 Reactive Systems pause input I output O 4
3 1980s: Statecharts [David Harel, Statecharts: A Visual Formalism for Complex Systems, Science of Computer Programming 1987] 5


4 1990s: Many Statecharts [Michael von der Beeck, A Comparison of Statecharts Variants, Formal Techniques in Real-Time and Fault-Tolerant Systems, LNCS 863, 1994] 6

5 1991: Argos [Florence Maraninchi, The Argos language: Graphical Representation of Automata and Description of Reactive Systems, IEEE Workshop on Visual Languages, Kobe, Japan, 1991] 7
6 1995: SyncCharts, a.k.a. Safe State Machines [Charles André, SyncCharts: A Visual Representation of Reactive Behaviors, Research Report 95-52, I3S, Sophia Antipolis, 1995] 8
7 SCCharts Motivation
8 Limitations of Strict Synchrony if (!x) { x = true; Good C } 10
9 Limitations of Strict Synchrony Bad SyncChart Good SCChart 11
10 Limitations of Strict Synchrony present x else Bad Esterel emit x end Good SCEst 12
11 SCCharts Motivation Preserve nice properties of synchronous programming Determinacy Sound semantic basis Efficient synthesis Reduce the pain Make it easy to adapt for mainstream programmer Reject only models where determinacy is compromised 13
12 Model of Computation
13 Sequential Constructiveness Sequential control flow overrides write before read Writes visible only to reads that are 1. sequential successors or 2. concurrent [v. Hanxleden, Mendler, et al., Sequentially Constructive Concurrency A Conservative Extension of the Synchronous Model of Computation, ACM TECS 14] 15
14 SCCharts MoC It s all about scheduling variable accesses within reaction Sequential accesses to x: unconstrained Concurrent accesses to x ( iur protocol ): init updates x = 1 x += 2 x += 5 reads y = x z = x Concurrent accesses may lead to causality cycles compiler must reject those 16
15 SCCharts MoC SCChart / SCEst program is SC, is sequentially constructive, if 1. there exist runs obeying iur protocol 2. all such runs produce same result SCC, corresponds to sequentially constructive circuit, if it is SC and does not speculate 17
16 Program Classes module XYpresent: [ emit X present X then emit Y end ] module XYelse: [ present X then emit Y end present Y else emit X end ] module XY: [ present X then emit Y end present Y then emit X end ] BC Acyclic BC Acyclic SCC SC module ABBA: [ present A and I then emit B end present B and not I then emit A end present A or B then emit O end ] module OffOn: present S then emit T end; emit S; present S then emit U end module Dynamic: loop emit S; present I then pause end; present S then emit T end; present I else pause end end 18
17 SCCharts The Language(s)
18 Interface declaration Initialization 21
19 Interface declaration Initialization Superstate 22
20 Interface declaration Initialization Superstate Region 23
21 Interface declaration Initialization Superstate Region Initial state 24
22 Interface declaration Initialization Superstate Region Initial state Final state 25
23 Interface declaration Delayed Transition (+ Trigger) Initialization Superstate Region Initial state Final state 26
24 Interface declaration Initialization Superstate Delayed Transition (+ Trigger) Immediate transition (+ Effect) Region Initial state Final state 27
25 Interface declaration Initialization Superstate Delayed Transition (+ Trigger) Immediate transition (+ Effect) Region Strong abort Initial state Final state 28
 Region Strong abort Initial state Final state")
26 Interface declaration Initialization Superstate Delayed Transition (+ Trigger) Immediate transition (+ Effect) Region Strong abort Initial state Final state Termination 29
27 SCChart Building Blocks 32





28 M2M Mappings Thread Conditional Assignment Concurrency Delay SCL t if (c) s1 else s2 x = e fork t1 par t2 join pause SCG 33
29 Some Syntactic Sugar: Core SCCharts Interface declaration Region ID Transition trigger/ effect Initial state Immediate transition Transition priority Root state Local declaration Superstate Anonymous simple state Termination Named simple state Final state 34
30 More Syntactic Sugar: Extended SCCharts
31 Compilation: Expand Signals 36

32 Compilation: Expand Signals 37

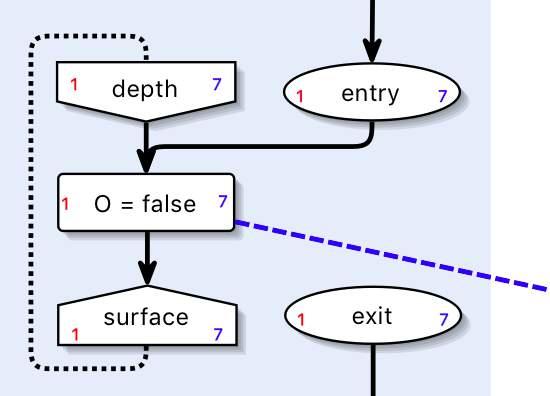
33 Expand During Action 38

34 Expand Abort 39

35 Core SCChart 40

36 Normalized Core SCChart 41

37 Normalized Core SCChart 42
38 Corresponding SCG 43
39 Taking Stock SCCharts defined by M2M Transformations Extended SCCharts Core SCCharts Normalized Core SCCharts SCL/SCG 44
40 SCCharts Pragmatics
41 Key to Pragmatics: MVC A model represents knowledge A view is a (visual) representation of its model. It would ordinarily highlight certain attributes of the model and suppress others. It is thus acting as a presentation filter. A controller is the link between a user and the system. It provides the user with input by arranging for relevant views to present themselves in appropriate places on the screen. [Trygve Reenskaug, Models Views Controllers, Xerox PARC technical note, 1979] 52
42 Textual Modeling SCChart model specified in.sctx Efficient editing Facilitates model comparison Easy revision control Graphical view automatically synthesized with KIELER (controller) Customizable view Saves developer time scchart ABRO { input signal A, B, R output signal O initial state ABthenO { initial state WaitAandB { region "HandleA" { initial state wa if A go to da final state da } region "HandleB" { initial state wb if B go to db final state db } } join to done do O final state done } if R abort to ABthenO } 53


43 SCCharts Eclipse Layout Kernel All open source, under EPL license 54

44 View Synthesis

45 Adding Region HandleC
46 Back to Original ABRO
47 Graphics-to-Text Navigation: Select Region
48 Graphics-to-Text Navigation: Select Transition

49 View Filtering: Hide Declarations

50 View Filtering: Collapse Regions
51 Direction VH (Vertical-Horizontal)
52 Change Layout: Direction HV

53 Change Layout: Direction Down

54 Change Layout: Direction Right
55 Simulation Initialization
56 Simulation Tick 1
57 Simulation Tick 1
58 Simulation Tick 2
59 Simulation Tick 3
60 Simulation Tick 3
61 Simulation Tick 4
62 Simulation Tick 5
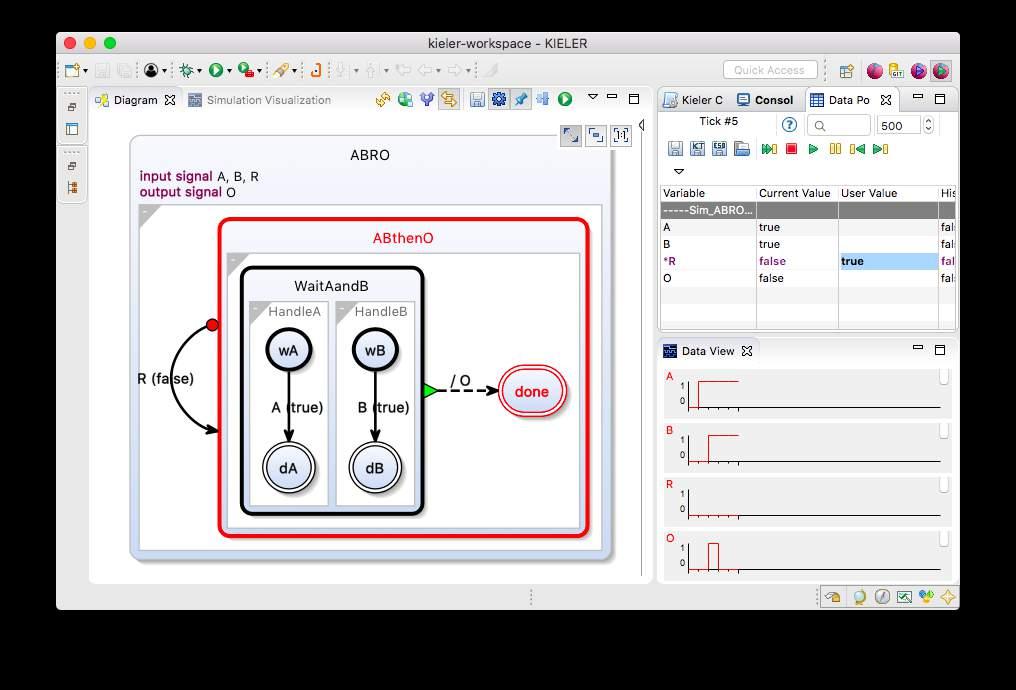
63 Simulation Tick 5
64 Simulation Tick 6
65 SCCharts Classroom-Tested 77


66 SCCharts Classroom-Tested / SCChart nodes before/after normalization lines of C-code Compiles in about 2 min s 2 ms reaction time 78
67 SCCharts Modeling Dataflow

68 Dataflow View in ABRO

69 Dataflow View in ABRO

70 Dataflow View in ABRO

71 Dataflow View, with Communication [Wechselberg, Schulz-Rosengarten, Smyth, von Hanxleden Augmenting State Models with Data Flow Principles of Modeling LNCS Festschrift on Edward Lee's 60th Birthday (to appear)]

72 Dataflow View, with Communication [Wechselberg, Schulz-Rosengarten, Smyth, von Hanxleden Augmenting State Models with Data Flow Principles of Modeling LNCS Festschrift on Edward Lee's 60th Birthday (to appear)]
73 Dataflow View, with Communication [Wechselberg, Schulz-Rosengarten, Smyth, von Hanxleden Augmenting State Models with Data Flow Principles of Modeling LNCS Festschrift on Edward Lee's 60th Birthday (to appear)]

74 Dataflow View, with Communication [Wechselberg, Schulz-Rosengarten, Smyth, von Hanxleden Augmenting State Models with Data Flow Principles of Modeling LNCS Festschrift on Edward Lee's 60th Birthday (to appear)]
75 [Colaço, Pagano, Pouzet, A Conservative Extension of Synchronous Dataflow with State Machines, EMSOFT'05] 87

76 [Clement Pascutto (ENS), Internship project at Kiel]

77 [Clement Pascutto (ENS), Internship project at Kiel]
78
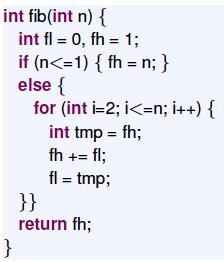
79 From C to SCCharts

80 Extracting Visual Models from C [Smyth, Lenga, von Hanxleden, Model Extraction of Legacy C Code in SCCharts, ISoLA DS 2016] 92
81 93
82 94
83 96
84 97
85 SCCharts Wrap-Up Language 5 core constructs Smörgåsboard of extensions Model of Computation Relaxed synchrony Still determinate Can model C programs Compilation M2M transformations Stress-tested in KIELER Still plenty of things to do: Variants on SC MoC, optimize code generation, pragmatics improvements for schedulability analysis,
86 Code Generation
87 Downstream Compilation So far, two alternative compilation strategies from SCL/SCG to C/VHDL Dataflow Priority Accepts instantaneous loops + Can synthesize hardware + Can synthesize software + + Size scales well (linear in size of SCChart) + + Speed scales well (execute only active parts) + Instruction-cache friendly (good locality) + Pipeline friendly (little/no branching) + WCRT predictable (simple control flow) + +/ Low execution time jitter (simple/fixed flow) + [von Hanxleden, Duderstadt, Motika, et al., SCCharts: Sequentially Constructive Statecharts for Safety-Critical Applications, PLDI'14] 100
88 Compilation Option 1: Dataflow 101
89 Dataflow SCG 102

90 Compilation Option 2: Priority-Based 103

91 Compilation Option 2: Priority-Based 104
92 Priority-Based C Code int tick() { tickstart(7); fork1(_region_0,_region_1, 3) { _region_0: O = 0; pause; goto _region_0; _region_3: fork1(handleb,handlea, 1) { HandleB: prio(5); pause; if(r){ } else { if(b){ } else { prio(1); goto HandleA; } } } join2(2, 5); if(r){ } par { _region_1: fork1(_region_2,_region_3, 2) { _region_2: prio(6); pause; if(r){ } else { prio(3); goto _region_2; } } par { } else { prio(2); goto HandleB; } } } par { HandleA: prio(4); pause; if(r){ } else { if(a){ } else { O = 1; } } join2(3, 6); prio(3); goto _region_1; } join1(7); tickreturn(); } 105
93 SCCharts and Time I 0 O 0 I 1 O 1 I 2 O t l Synchrony Hypothesis: Outputs are synchronous with inputs Computation "does not take time" Actual computation time does not influence result Sequence of outputs determined by inputs 106
94 Synchronous Execution [Benveniste et al., The Synchronous Languages Twelve Years Later, Proc. IEEE, 2003] 107
95 Multiform Notion of Time Only the simultaneity and precedence of events are considered. This means that the physical time does not play any special role. This is called multiform notion of time. [ 108
96 Packaging Physical Time as Events [Timothy Bourke, SYNCHRON 2009] Event "HMS": 100 μsec have passed since last HMS Event "TMS": 1000 μsec have passed since last TMS 109
97 A Problem With That... [Timothy Bourke, SYNCHRON 2009] 110


98 Dynamic Ticks I 0 O 0 I 1 O 1 I 2 O 2 Recall logical time: t l Physical time, time-triggered: Physical time, dynamic ticks: [von Hanxleden, Bourke, Girault, Real-Time Ticks for Synchronous Programming, FDL'17]
99 SCCharts Textual Representation /** Controller for stepper motor */ scchart MOTOR { output int currentusec = 0; // [usec] Current simulated time; // when deployed, this should be input output int wakeusec; // [usec] Time for next wake-up input bool accel, decel; // Increase/decrease speed input bool stop; // Emergency stop - sets (angular) speeds to 0 output bool motor = false; // Motor pulse output float v; // [cm/sec] Robot speed output int pmotorusec; // [usec] Half period for motor int psetspeedsmaxusec = ; // [usec] Maximum period of speed control loop int psetspeedsminusec = ; // [usec] Minimum period of speed control loop output int pusec; // [usec] Previous period (delta of wake-up times) output int pminusec = psetspeedsmaxusec; // [usec] Minimum period float dv = 2; // [cm/sec] Delta v applied during one speed // control loop cycle float vmax = 20; // [cm/sec] Max speed of left/right motor float cmperhalfperiod = 1; // [cm] Distance traveled by motor per half period 114 // (duration of true or false)
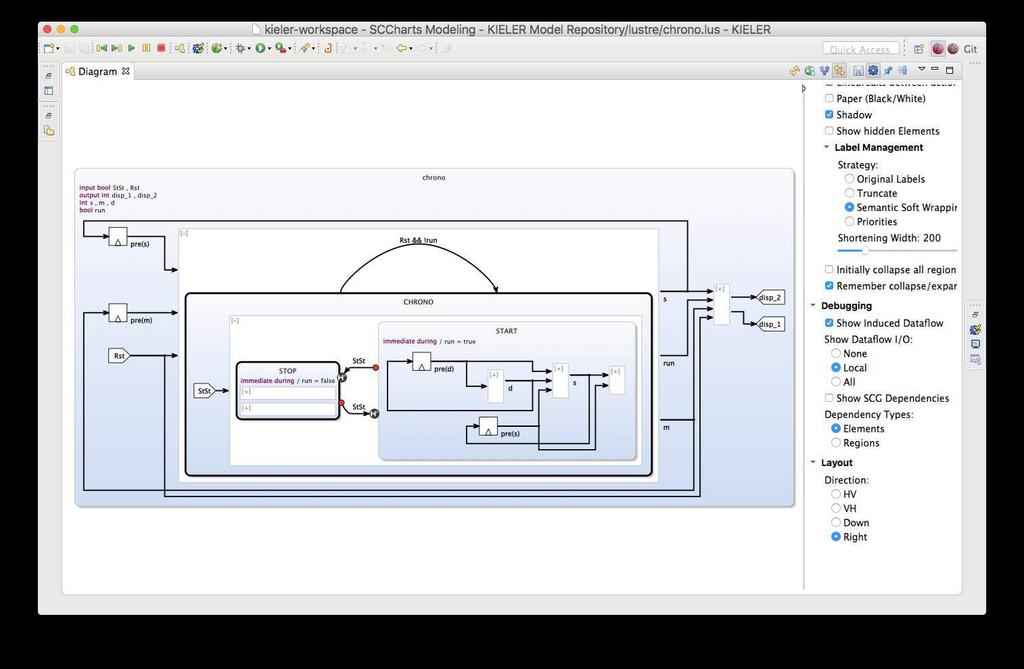
![/** Controller for stepper motor */ scchart MOTOR { output int currentusec = 0; // [usec] Current simulated time; when deployed, this should be input output int wakeusec; // [usec] Time for next](/docs-images/94/120354319/images/100-0.jpg "wake-up input bool accel, decel; // Increase/decrease speed input bool stop; // Emergency stop - sets (angular) speeds to 0 Now use KIELER to int psetspeedsmaxusec = 500000; // [usec] Maximum period")
![of speed control loop // [cm/sec] Delta v applied during one speed control loop cycle synthesize graphical output bool motor = false; // Motor pulse output float v; // [cm/sec] Robot speed output int](/docs-images/94/120354319/images/100-1.jpg "pmotorusec; // [usec] Half period for motor int psetspeedsminusec = 400000; // [usec] Minimum period of speed control loop output int pusec; // [usec] Previous period (delta of wake-up times) output")
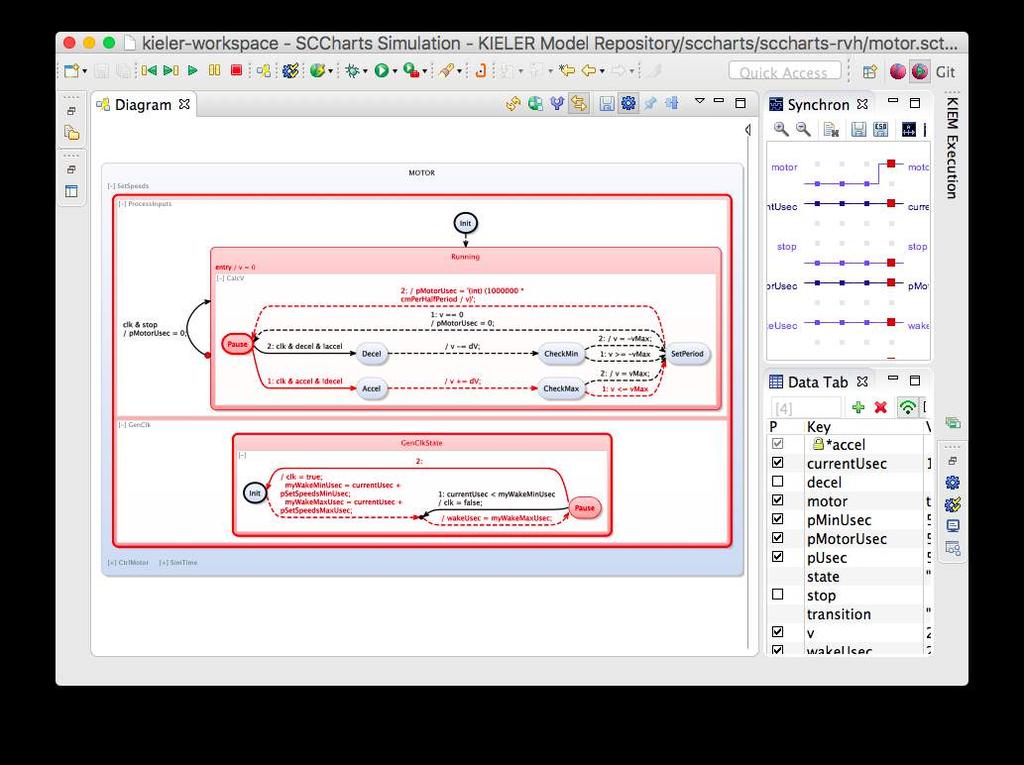
100 /** Controller for stepper motor */ scchart MOTOR { output int currentusec = 0; // [usec] Current simulated time; when deployed, this should be input output int wakeusec; // [usec] Time for next wake-up input bool accel, decel; // Increase/decrease speed input bool stop; // Emergency stop - sets (angular) speeds to 0 Now use KIELER to int psetspeedsmaxusec = ; // [usec] Maximum period of speed control loop // [cm/sec] Delta v applied during one speed control loop cycle synthesize graphical output bool motor = false; // Motor pulse output float v; // [cm/sec] Robot speed output int pmotorusec; // [usec] Half period for motor int psetspeedsminusec = ; // [usec] Minimum period of speed control loop output int pusec; // [usec] Previous period (delta of wake-up times) output int pminusec = psetspeedsmaxusec; // [usec] Minimum period float dv = 2; float vmax = 20; // [cm/sec] Max speed of left/right motor float cmperhalfperiod = 1; // [cm] Distance traveled by motor per half period (duration of true or false) // =================================================================================== region SetSpeeds: initial state SetSpeeds "" { // Possible syntax, to replace the clk flag and the GenClk region, // and not having to condition delayed triggers with "clk &": // clock type = soft, min = psetspeedsminusec, max = psetspeedsmaxusec bool clk; // Local clock // =================================================================================== region ProcessInputs: initial state Init --> Running immediate; state Running { entry / v = 0; // =================================================================================== region CalcV: initial state Pause --> Accel with clk & accel &!decel --> Decel with clk & decel &!accel; state Accel --> CheckMax immediate with / v += dv; state Decel --> CheckMin immediate with / v -= dv; state CheckMax --> SetPeriod immediate with v <= vmax --> SetPeriod immediate with / v = vmax; // =================================================================================== region GenClk: initial state GenClkState { int mywakeminusec, mywakemaxusec; }; }; initial state Init --> AssertWakeTime immediate with / clk = true; mywakeminusec = currentusec + psetspeedsminusec; mywakemaxusec = currentusec + psetspeedsmaxusec; connector state AssertWakeTime --> Pause immediate with / wakeusec = mywakemaxusec; // Initialize LAST state Pause --> AssertWakeTime with currentusec < mywakeminusec / clk = false --> Init; // =================================================================================== region CtrlMotor: initial state CtrlMotor "" { // Possible syntax, to replace the clk flag and the GenClk region, // and not having to condition delayed triggers with "clk &": // clock type = hard, min = * cmperhalfperiod / vmax // = bool clk; // Local clock // =================================================================================== SCChart with region GenClk: ELK initial state GenClkState "" { int mywakeusec; initial state Stopped --> AssertWakeTime immediate with pmotorusec > 0 / mywakeusec = currentusec + pmotorusec; clk = true; connector state AssertWakeTime and simulate --> Running immediate with / wakeusec min= mywakeusec;... // Initialize LAST state Running --> ResetClock with / clk = false; connector state ResetClock --> AssertWakeTime immediate with pmotorusec > 0 & currentusec < mywakeusec --> Stopped immediate; }; // =================================================================================== region Motor: initial state Low --> High with clk / motor = true; state CheckMin --> SetPeriod immediate with v >= - vmax --> SetPeriod immediate with / v = - vmax; state SetPeriod --> Pause immediate with v == 0 / pmotorusec = 0 --> Pause immediate with / pmotorusec = '(int) ( * cmperhalfperiod / v)'; } o-> Running with clk & stop / pmotorusec = 0; 115 state High --> Low with clk / motor = false; }; // =================================================================================== region SimTime: initial state SimTimeState "" { during / pusec = currentusec; currentusec = pre(wakeusec); pusec = currentusec - pusec; pminusec min= pusec; }; }
101 116
]")
102 [Wechselberg, Schulz-Rosengarten, Smyth, von Hanxleden Augmenting State Models with Data Flow Principles of Modeling LNCS Festschrift on Edward Lee's 60th Birthday (to appear)] 117
Overview. Synchronous Languages Lecture 12. Code Generation for Sequential Constructiveness. Compilation Overview. The 5-Minute Review Session
 Synchronous Languages Lecture 12 Overview Prof. Dr. Reinhard von Hanxleden Steven Smyth Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and Embedded Systems Group
Synchronous Languages Lecture 12 Overview Prof. Dr. Reinhard von Hanxleden Steven Smyth Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and Embedded Systems Group
Updates on SCCharts Christian Motika Steven Smyth
 Updates on SCCharts Updates on SCCharts Christian Motika Steven Smyth SYNCHRON 2015 04. DEC 2015, Kiel 1 Reactive System Updates on SCCharts Safety-critical systems State based reactions Concurrency Synchronous
Updates on SCCharts Updates on SCCharts Christian Motika Steven Smyth SYNCHRON 2015 04. DEC 2015, Kiel 1 Reactive System Updates on SCCharts Safety-critical systems State based reactions Concurrency Synchronous
SCCharts. Sequentially Constructive Charts
 SCCharts Sequentially Constructive Charts Reinhard von Hanxleden, Björn Duderstadt, Christian Motika, Steven Smyth, Michael Mendler, Joaquin Aguado, Stephen Mercer, and Owen O Brien Real-Time Systems and
SCCharts Sequentially Constructive Charts Reinhard von Hanxleden, Björn Duderstadt, Christian Motika, Steven Smyth, Michael Mendler, Joaquin Aguado, Stephen Mercer, and Owen O Brien Real-Time Systems and
Compiling SCCharts A Case-Study on Interactive Model-Based Compilation
 Compiling SCCharts A Case-Study on Interactive Model-Based Compilation Christian Motika, Steven Smyth, and Reinhard von Hanxleden Real-Time and Embedded Systems Group, Department of Computer Science Christian-Albrechts-Universität
Compiling SCCharts A Case-Study on Interactive Model-Based Compilation Christian Motika, Steven Smyth, and Reinhard von Hanxleden Real-Time and Embedded Systems Group, Department of Computer Science Christian-Albrechts-Universität
A Data-Flow Approach for Compiling the Sequentially Constructive Language (SCL)
") A Data-Flow Approach for Compiling the Sequentially Constructive Language (SCL) Steven Smyth, Christian Motika, and Reinhard von Hanxleden Real-Time and Embedded Systems Group, Department of Computer Science
A Data-Flow Approach for Compiling the Sequentially Constructive Language (SCL) Steven Smyth, Christian Motika, and Reinhard von Hanxleden Real-Time and Embedded Systems Group, Department of Computer Science
Reinhard v. Hanxleden 1, Michael Mendler 2, J. Aguado 2, Björn Duderstadt 1, Insa Fuhrmann 1, Christian Motika 1, Stephen Mercer 3 and Owen Brian 3
 Sequentially Constructive Concurrency * A conservative extension of the Synchronous Model of Computation Reinhard v. Hanxleden, Michael Mendler 2, J. Aguado 2, Björn Duderstadt, Insa Fuhrmann, Christian
Sequentially Constructive Concurrency * A conservative extension of the Synchronous Model of Computation Reinhard v. Hanxleden, Michael Mendler 2, J. Aguado 2, Björn Duderstadt, Insa Fuhrmann, Christian
Synchronous Statecharts. Christian Motika
 Execution (KlePto) Esterel to transformation (KIES) Synchronous Statecharts for executing Esterel with Ptolemy Christian Motika Real-Time Systems and Embedded Systems Group Department of Computer Science
Execution (KlePto) Esterel to transformation (KIES) Synchronous Statecharts for executing Esterel with Ptolemy Christian Motika Real-Time Systems and Embedded Systems Group Department of Computer Science
Synchronous Dataflow Processong
 Synchronous Dataflow Processong Claus Traulsen and Reinhard von Hanxleden Christian-Albrechts Universität zu Kiel Echtzeitsysteme / Eingebettete Systeme March 00 CAU Claus Traulsen / 8 Outline Motivation
Synchronous Dataflow Processong Claus Traulsen and Reinhard von Hanxleden Christian-Albrechts Universität zu Kiel Echtzeitsysteme / Eingebettete Systeme March 00 CAU Claus Traulsen / 8 Outline Motivation
Interactive Esterel to SyncCharts Transformation. Christian Motika
 Interactive Esterel to SyncCharts Transformation for executing Esterel with Ptolemy Christian Motika Real-Time Systems and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität
Interactive Esterel to SyncCharts Transformation for executing Esterel with Ptolemy Christian Motika Real-Time Systems and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität
INSTITUT FÜR INFORMATIK
 INSTITUT FÜR INFORMATIK A Sequentially Constructive Circuit Semantics for Esterel Alexander Schulz-Rosengarten, Steven Smyth, Reinhard von Hanxleden, Michael Mendler Bericht Nr. 1801 February 2018 ISSN
INSTITUT FÜR INFORMATIK A Sequentially Constructive Circuit Semantics for Esterel Alexander Schulz-Rosengarten, Steven Smyth, Reinhard von Hanxleden, Michael Mendler Bericht Nr. 1801 February 2018 ISSN
Interactive Incremental Hardware Synthesis
 Interactive Incremental Hardware Synthesis for SCCharts Francesca Rybicki Bachelor Thesis March 2016 Kiel University Prof. Dr. von Hanxleden Real-Time and Embedded Systems Advised by: Dipl.-Inf. Christian
Interactive Incremental Hardware Synthesis for SCCharts Francesca Rybicki Bachelor Thesis March 2016 Kiel University Prof. Dr. von Hanxleden Real-Time and Embedded Systems Advised by: Dipl.-Inf. Christian
Concurrent Models of Computation
 Concurrent Models of Computation Edward A. Lee Robert S. Pepper Distinguished Professor, UC Berkeley EECS 219D Concurrent Models of Computation Fall 2011 Copyright 2009-2011, Edward A. Lee, All rights
Concurrent Models of Computation Edward A. Lee Robert S. Pepper Distinguished Professor, UC Berkeley EECS 219D Concurrent Models of Computation Fall 2011 Copyright 2009-2011, Edward A. Lee, All rights
Modal Models in Ptolemy
 Modal Models in Ptolemy Edward A. Lee Stavros Tripakis UC Berkeley Workshop on Equation-Based Object-Oriented Modeling Languages and Tools 3rd International Workshop on Equation-Based Object-Oriented Modeling
Modal Models in Ptolemy Edward A. Lee Stavros Tripakis UC Berkeley Workshop on Equation-Based Object-Oriented Modeling Languages and Tools 3rd International Workshop on Equation-Based Object-Oriented Modeling
Synchronous C + WCRT Algebra 101
 Synchronous C + 101 Reinhard von Hanxleden Joint work with Michael Mendler, Claus Traulsen,... Real-Time and Embedded Systems Group (RTSYS) Department of Computer Science Christian-Albrechts-Universität
Synchronous C + 101 Reinhard von Hanxleden Joint work with Michael Mendler, Claus Traulsen,... Real-Time and Embedded Systems Group (RTSYS) Department of Computer Science Christian-Albrechts-Universität
Executing SyncCharts with Ptolemy
 Executing SyncCharts with Christian Motika Real-Time Systems and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität zu Kiel, Germany KIEL ER SYNCHRON Workshop 2010 Frejús,
Executing SyncCharts with Christian Motika Real-Time Systems and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität zu Kiel, Germany KIEL ER SYNCHRON Workshop 2010 Frejús,
Predictable multithreading of embedded applications using PRET-C
 Predictable multithreading of embedded applications using PRET-C Sidharta Andalam University of Auckland New Zealand Interactive Presentation March 2010 Andalam (UoA) PRET DATE'10 1 / 20 Layout 1 Introduction
Predictable multithreading of embedded applications using PRET-C Sidharta Andalam University of Auckland New Zealand Interactive Presentation March 2010 Andalam (UoA) PRET DATE'10 1 / 20 Layout 1 Introduction
Submitted to Special Issue on Application of Concurrency to System Design
 Submitted to Special Issue on Application of Concurrency to System Design A Sequentially Constructive Concurrency A Conservative Extension of the Synchronous Model of Computation REINHARD VON HANXLEDEN,
Submitted to Special Issue on Application of Concurrency to System Design A Sequentially Constructive Concurrency A Conservative Extension of the Synchronous Model of Computation REINHARD VON HANXLEDEN,
PRET-C: A New Language for Programming Precision Timed Architectures (extended abstract)
") PRET-C: A New Language for Programming Precision Timed Architectures (extended abstract) Sidharta Andalam 1, Partha S Roop 1, Alain Girault 2, and Claus Traulsen 3 1 University of Auckland, New Zealand
PRET-C: A New Language for Programming Precision Timed Architectures (extended abstract) Sidharta Andalam 1, Partha S Roop 1, Alain Girault 2, and Claus Traulsen 3 1 University of Auckland, New Zealand
Synchronous reactive programming
 Synchronous reactive programming Marcus Sundman Department of Computer Science Åbo Akademi University, FIN-20520 Åbo, Finland e-mail: marcus.sundman@iki.fi URL: http://www.iki.fi/marcus.sundman/ Abstract
Synchronous reactive programming Marcus Sundman Department of Computer Science Åbo Akademi University, FIN-20520 Åbo, Finland e-mail: marcus.sundman@iki.fi URL: http://www.iki.fi/marcus.sundman/ Abstract
Reactive Parallel Processing for Synchronous Dataflow
 Reactive Parallel Processing for Synchronous Dataflow Claus Traulsen and Reinhard von Hanxleden Real-Time and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität zu Kiel
Reactive Parallel Processing for Synchronous Dataflow Claus Traulsen and Reinhard von Hanxleden Real-Time and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität zu Kiel
EE382N.23: Embedded System Design and Modeling
 EE382N.23: Embedded System Design and Modeling Lecture 3 Language Semantics Andreas Gerstlauer Electrical and Computer Engineering University of Texas at Austin gerstl@ece.utexas.edu Lecture 3: Outline
EE382N.23: Embedded System Design and Modeling Lecture 3 Language Semantics Andreas Gerstlauer Electrical and Computer Engineering University of Texas at Austin gerstl@ece.utexas.edu Lecture 3: Outline
SyncCharts in C. Reinhard von Hanxleden
 SyncCharts in C Reinhard von Hanxleden Real-Time and Embedded Systems Group (RTSYS) Department of Computer Science Christian-Albrechts-Universität zu Kiel www.informatik.uni-kiel.de/rtsys EMSOFT 09, Grenoble,
SyncCharts in C Reinhard von Hanxleden Real-Time and Embedded Systems Group (RTSYS) Department of Computer Science Christian-Albrechts-Universität zu Kiel www.informatik.uni-kiel.de/rtsys EMSOFT 09, Grenoble,
Prof. Dr. Reinhard von Hanxleden. Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and Embedded Systems Group
 Design of Embedded Systems: Models, Validation and Synthesis (EE 249) Lecture 4a Prof. Dr. Reinhard von Hanxleden Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and
Design of Embedded Systems: Models, Validation and Synthesis (EE 249) Lecture 4a Prof. Dr. Reinhard von Hanxleden Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and
States Transitions Connectors Esterel Studio
 Time in Differences SyncCharts differ from other implementations of : Synchronous framework Determinism Compilation into backend language Esterel No interpretation for simulations No hidden behaviour Multiple
Time in Differences SyncCharts differ from other implementations of : Synchronous framework Determinism Compilation into backend language Esterel No interpretation for simulations No hidden behaviour Multiple
Fusing Dataflow with Finite State Machines
 May 3, 1996 U N T H E I V E R S I T Y A O F LE T TH E R E B E 1 8 6 8 LIG H T C A L I A I F O R N Fusing Dataflow with Finite State Machines Department of Electrical Engineering and Computer Science Bilung
May 3, 1996 U N T H E I V E R S I T Y A O F LE T TH E R E B E 1 8 6 8 LIG H T C A L I A I F O R N Fusing Dataflow with Finite State Machines Department of Electrical Engineering and Computer Science Bilung
Hierarchical FSMs with Multiple CMs
 Hierarchical FSMs with Multiple CMs Manaloor Govindarajan Balasubramanian Manikantan Bharathwaj Muthuswamy (aka Bharath) Reference: Hierarchical FSMs with Multiple Concurrency Models. Alain Girault, Bilung
Hierarchical FSMs with Multiple CMs Manaloor Govindarajan Balasubramanian Manikantan Bharathwaj Muthuswamy (aka Bharath) Reference: Hierarchical FSMs with Multiple Concurrency Models. Alain Girault, Bilung
Lecture 2. The SCADE Language Data Flow Kernel. Daniel Kästner AbsInt GmbH 2012
 Lecture 2 The SCADE Language Data Flow Kernel Daniel Kästner AbsInt GmbH 2012 2 Synchronous Programming Two simple ways of implementing reactive systems: Event-driven Foreach input_event
Lecture 2 The SCADE Language Data Flow Kernel Daniel Kästner AbsInt GmbH 2012 2 Synchronous Programming Two simple ways of implementing reactive systems: Event-driven Foreach input_event
Deterministic Concurrency
 Candidacy Exam p. 1/35 Deterministic Concurrency Candidacy Exam Nalini Vasudevan Columbia University Motivation Candidacy Exam p. 2/35 Candidacy Exam p. 3/35 Why Parallelism? Past Vs. Future Power wall:
Candidacy Exam p. 1/35 Deterministic Concurrency Candidacy Exam Nalini Vasudevan Columbia University Motivation Candidacy Exam p. 2/35 Candidacy Exam p. 3/35 Why Parallelism? Past Vs. Future Power wall:
Synchronous Kahn Networks (ten years later)
") Synchronous Kahn Networks (ten years later) Marc Pouzet LRI Marc.Pouzet@lri.fr Workshop SYNCHRON, 27/11/06 Overview The origins From Lustre to Lucid Synchrone Developping a Language Conclusion The origins
Synchronous Kahn Networks (ten years later) Marc Pouzet LRI Marc.Pouzet@lri.fr Workshop SYNCHRON, 27/11/06 Overview The origins From Lustre to Lucid Synchrone Developping a Language Conclusion The origins
The Esterel language
 Pascal Raymond, Verimag-CNRS Introduction 2 The first synchronous language (early 80 s) Gérard Berry and his team (École des Mines de Paris / INRIA Sophia-Antipolis) Imperative, sequential style (i.e.
Pascal Raymond, Verimag-CNRS Introduction 2 The first synchronous language (early 80 s) Gérard Berry and his team (École des Mines de Paris / INRIA Sophia-Antipolis) Imperative, sequential style (i.e.
Introduction 2 The first synchronous language (early 80 s) Gérard Berry and his team (École des Mines de Paris / INRIA Sophia-Antipolis) Imperative, s
 Gérard Berry and his team (École des Mines de Paris / INRIA Sophia-Antipolis) Imperative, s") Pascal Raymond, Verimag-CNRS Introduction 2 The first synchronous language (early 80 s) Gérard Berry and his team (École des Mines de Paris / INRIA Sophia-Antipolis) Imperative, sequential style (i.e.
Pascal Raymond, Verimag-CNRS Introduction 2 The first synchronous language (early 80 s) Gérard Berry and his team (École des Mines de Paris / INRIA Sophia-Antipolis) Imperative, sequential style (i.e.
Predictable multithreading of embedded applications using PRET-C
 Author manuscript, published in "International Conference on Formal Methods and Models for Codesign, MEMOCODE'1 (21) 159-168" DOI : 1.119/MEMCOD.21.5558636 Predictable multithreading of embedded applications
Author manuscript, published in "International Conference on Formal Methods and Models for Codesign, MEMOCODE'1 (21) 159-168" DOI : 1.119/MEMCOD.21.5558636 Predictable multithreading of embedded applications
Separate Translation of Synchronous Programs to Guarded Actions
 Separate Translation of Synchronous Programs to Guarded Actions Jens Brandt and Klaus Schneider Embedded Systems Group Department of Computer Science University of Kaiserslautern http://es.cs.uni-kl.de
Separate Translation of Synchronous Programs to Guarded Actions Jens Brandt and Klaus Schneider Embedded Systems Group Department of Computer Science University of Kaiserslautern http://es.cs.uni-kl.de
A Simple Example. The Synchronous Language Esterel. A First Try: An FSM. The Esterel Version. The Esterel Version. The Esterel Version
 The Synchronous Language Prof. Stephen. Edwards Simple Example The specification: The output O should occur when inputs and have both arrived. The R input should restart this behavior. First Try: n FSM
The Synchronous Language Prof. Stephen. Edwards Simple Example The specification: The output O should occur when inputs and have both arrived. The R input should restart this behavior. First Try: n FSM
Time for Reactive System Modeling: Interactive Timing Analysis with Hotspot Highlighting
 Time for Reactive System Modeling: Interactive Timing Analysis with Hotspot Highlighting Insa Fuhrmann Kiel University, Department of Computer Science Kiel, Germany ima@informatik.unikiel.de David Broman
Time for Reactive System Modeling: Interactive Timing Analysis with Hotspot Highlighting Insa Fuhrmann Kiel University, Department of Computer Science Kiel, Germany ima@informatik.unikiel.de David Broman
Programming Languages for Real-Time Systems. LS 12, TU Dortmund
 Programming Languages for Real-Time Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20 June 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 41 References Slides are based on Prof. Wang Yi, Prof.
Programming Languages for Real-Time Systems Prof. Dr. Jian-Jia Chen LS 12, TU Dortmund 20 June 2016 Prof. Dr. Jian-Jia Chen (LS 12, TU Dortmund) 1 / 41 References Slides are based on Prof. Wang Yi, Prof.
A Multi-Threaded Reactive Processor
 A Multi-Threaded Reactive Processor Xin Li Marian Boldt Reinhard v. Hanxleden Real-Time Systems and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität zu Kiel, Germany
A Multi-Threaded Reactive Processor Xin Li Marian Boldt Reinhard v. Hanxleden Real-Time Systems and Embedded Systems Group Department of Computer Science Christian-Albrechts-Universität zu Kiel, Germany
A Synchronous-based Code Generator For Explicit Hybrid Systems Languages
 A Synchronous-based Code Generator For Explicit Hybrid Systems Languages Timothy Bourke 1 Jean-Louis Colaço 2 Bruno Pagano 2 Cédric Pasteur 2 Marc Pouzet 3,1 1. INRIA Paris-Rocquencourt 2. Esterel-Technologies/ANSYS,
A Synchronous-based Code Generator For Explicit Hybrid Systems Languages Timothy Bourke 1 Jean-Louis Colaço 2 Bruno Pagano 2 Cédric Pasteur 2 Marc Pouzet 3,1 1. INRIA Paris-Rocquencourt 2. Esterel-Technologies/ANSYS,
Analyzing Robustness of UML State Machines
 Analyzing Robustness of UML State Machines Reinhard von Hanxleden Department of Computer Science and Applied Mathematics Real-Time Systems and Embedded Systems Group Christian-Albrecht Universität zu Kiel
Analyzing Robustness of UML State Machines Reinhard von Hanxleden Department of Computer Science and Applied Mathematics Real-Time Systems and Embedded Systems Group Christian-Albrecht Universität zu Kiel
Synchronous Languages Lecture 07
 Synchronous Languages Lecture 07 Prof. Dr. Reinhard von Hanxleden Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and Embedded Systems Group 27 May 2015 Last compiled:
Synchronous Languages Lecture 07 Prof. Dr. Reinhard von Hanxleden Christian-Albrechts Universität Kiel Department of Computer Science Real-Time Systems and Embedded Systems Group 27 May 2015 Last compiled:
Programming Deterministic Reactive Systems with Synchronous Java
 Programming Deterministic Reactive Systems with Synchronous Java Christian Motika and Reinhard von Hanxleden and Mirko Heinold Dept. of Computer Science Christian-Albrechts-Unversität zu Kiel 24098 Kiel,
Programming Deterministic Reactive Systems with Synchronous Java Christian Motika and Reinhard von Hanxleden and Mirko Heinold Dept. of Computer Science Christian-Albrechts-Unversität zu Kiel 24098 Kiel,
Embedded Software Engineering
 Embedded Software Engineering 3 Unit Course, Spring 2002 EECS Department, UC Berkeley Christoph Kirsch www.eecs.berkeley.edu/~fresco/giotto/course-2002 It s significant $4 billion development effort >
Embedded Software Engineering 3 Unit Course, Spring 2002 EECS Department, UC Berkeley Christoph Kirsch www.eecs.berkeley.edu/~fresco/giotto/course-2002 It s significant $4 billion development effort >
SyncCharts in C: A Proposal for Light-Weight, Deterministic Concurrency
 SyncCharts in C: A Proposal for Light-Weight, Deterministic Concurrency [Extended Abstract] Reinhard von Hanxleden Department of Computer Science, Christian-Albrechts-Universität zu Kiel Olshausenstr.
SyncCharts in C: A Proposal for Light-Weight, Deterministic Concurrency [Extended Abstract] Reinhard von Hanxleden Department of Computer Science, Christian-Albrechts-Universität zu Kiel Olshausenstr.
Removing Cycles in Esterel Programs
 Removing Cycles in Esterel Programs Dissertation zur Erlangung des akademischen Grades Doktor der Naturwissenschaften (Dr. rer. nat.) der Technischen Fakultät der Christian-Albrechts-Universität zu Kiel
Removing Cycles in Esterel Programs Dissertation zur Erlangung des akademischen Grades Doktor der Naturwissenschaften (Dr. rer. nat.) der Technischen Fakultät der Christian-Albrechts-Universität zu Kiel
The Esterel Language. The Esterel Version. Basic Ideas of Esterel
 The Synchronous Language Esterel OMS W4995-02 Prof. Stephen. Edwards Fall 2002 olumbia University epartment of omputer Science The Esterel Language eveloped by Gérard erry starting 1983 Originally for
The Synchronous Language Esterel OMS W4995-02 Prof. Stephen. Edwards Fall 2002 olumbia University epartment of omputer Science The Esterel Language eveloped by Gérard erry starting 1983 Originally for
ESUIF: An Open Esterel Compiler
 ESUIF: An Open Esterel Compiler Stephen A. Edwards Department of Computer Science Columbia University www.cs.columbia.edu/ sedwards Not Another One... My research agenda is to push Esterel compilation
ESUIF: An Open Esterel Compiler Stephen A. Edwards Department of Computer Science Columbia University www.cs.columbia.edu/ sedwards Not Another One... My research agenda is to push Esterel compilation
Cyber Physical System Verification with SAL
 Cyber Physical System Verification with July 22, 2013 Cyber Physical System Verification with Outline 1 2 3 4 5 Cyber Physical System Verification with Table of Contents 1 2 3 4 5 Cyber Physical System
Cyber Physical System Verification with July 22, 2013 Cyber Physical System Verification with Outline 1 2 3 4 5 Cyber Physical System Verification with Table of Contents 1 2 3 4 5 Cyber Physical System
Clock-directed Modular Code-generation for Synchronous Data-flow Languages
 1 Clock-directed Modular Code-generation for Synchronous Data-flow Languages Dariusz Biernacki Univ. of Worclaw (Poland) Jean-Louis Colaço Prover Technologies (France) Grégoire Hamon The MathWorks (USA)
1 Clock-directed Modular Code-generation for Synchronous Data-flow Languages Dariusz Biernacki Univ. of Worclaw (Poland) Jean-Louis Colaço Prover Technologies (France) Grégoire Hamon The MathWorks (USA)
Chapter 2 Synchronous Programming: Overview
 Chapter 2 Synchronous Programming: Overview Abstract This chapter gives an overview of synchronous programming through the presentation of the main existing languages together with their associated tools.
Chapter 2 Synchronous Programming: Overview Abstract This chapter gives an overview of synchronous programming through the presentation of the main existing languages together with their associated tools.
UML Profile for MARTE: Time Model and CCSL
 UML Profile for MARTE: Time Model and CCSL Frédéric Mallet 1 Université Nice Sophia Antipolis, Aoste team INRIA/I3S, Sophia Antipolis, France Frederic.Mallet@unice.fr Abstract. This 90 minutes tutorial
UML Profile for MARTE: Time Model and CCSL Frédéric Mallet 1 Université Nice Sophia Antipolis, Aoste team INRIA/I3S, Sophia Antipolis, France Frederic.Mallet@unice.fr Abstract. This 90 minutes tutorial
State Machines in OpenModelica
 State Machines in OpenModelica Current Status and Further Development Bernhard Thiele PELAB Linköping University 02. February 2015 - Open Modelica Annual Workshop 1 / 16 Goals of this presentation Introduce
State Machines in OpenModelica Current Status and Further Development Bernhard Thiele PELAB Linköping University 02. February 2015 - Open Modelica Annual Workshop 1 / 16 Goals of this presentation Introduce
Section 8. The Basic Step Algorithm
 Section 8. The Basic Step Algorithm Inputs The status of the system The current time A list of external changes presented by the environment since the last step Comments Scheduled action appears in the
Section 8. The Basic Step Algorithm Inputs The status of the system The current time A list of external changes presented by the environment since the last step Comments Scheduled action appears in the
Safe Reactive Programming: the FunLoft Proposal
 Safe Reactive Programming: the FunLoft Proposal Frédéric Boussinot MIMOSA Project, Inria Sophia-Antipolis (Joint work with Frédéric Dabrowski) http://www.inria.fr/mimosa/rp With support from ALIDECS SYNCHRON
Safe Reactive Programming: the FunLoft Proposal Frédéric Boussinot MIMOSA Project, Inria Sophia-Antipolis (Joint work with Frédéric Dabrowski) http://www.inria.fr/mimosa/rp With support from ALIDECS SYNCHRON
Using and Compiling Esterel
 Using and Compiling Esterel Stephen A. Edwards Columbia University Department of Computer Science sedwards@cs.columbia.edu http://www.cs.columbia.edu/ sedwards/ Memocode Tutorial, July 11, 2005 The Esterel
Using and Compiling Esterel Stephen A. Edwards Columbia University Department of Computer Science sedwards@cs.columbia.edu http://www.cs.columbia.edu/ sedwards/ Memocode Tutorial, July 11, 2005 The Esterel
World Wide Web Server.
 World Wide Web Server Complete distribution of version 0.5.2, including all source code. Distribution of Ptiny Ptolemy, a small demonstration version. An evolving quick tour of Ptolemy with animations
World Wide Web Server Complete distribution of version 0.5.2, including all source code. Distribution of Ptiny Ptolemy, a small demonstration version. An evolving quick tour of Ptolemy with animations
Relaxed Memory-Consistency Models
 Relaxed Memory-Consistency Models [ 9.1] In small multiprocessors, sequential consistency can be implemented relatively easily. However, this is not true for large multiprocessors. Why? This is not the
Relaxed Memory-Consistency Models [ 9.1] In small multiprocessors, sequential consistency can be implemented relatively easily. However, this is not true for large multiprocessors. Why? This is not the
IEC [1] is an international standard that defines a
![IEC [1] is an international standard that defines a](/thumbs/75/71630453.jpg "IEC [1] is an international standard that defines a") 1 A Synchronous Approach for IEC 61499 Function Block Implementation Li Hsien Yoong, Partha S Roop, Valeriy Vyatkin and Zoran Salcic Abstract IEC 61499 has been orsed as the standard for modelling and
1 A Synchronous Approach for IEC 61499 Function Block Implementation Li Hsien Yoong, Partha S Roop, Valeriy Vyatkin and Zoran Salcic Abstract IEC 61499 has been orsed as the standard for modelling and
Tutorial and Reference Manual
 Zélus: a Synchronous Language with ODEs Release, version 1.2 Tutorial and Reference Manual http://zelus.di.ens.fr Marc Pouzet Albert Benveniste, Timothy Bourke and Benoit Caillaud Inria Project Team PARKAS,
Zélus: a Synchronous Language with ODEs Release, version 1.2 Tutorial and Reference Manual http://zelus.di.ens.fr Marc Pouzet Albert Benveniste, Timothy Bourke and Benoit Caillaud Inria Project Team PARKAS,
SYNCHRON'16, Bamberg. Lego Mindstorms 6. Lego Mindstorms Preparations 7. Exercise V: SCCharts for Lego Mindstorms 8. Exercise VI: SCCharts Pathfinder
 SCCharts Tutorial, KIELER SCCharts 1. Tutorial Preparations 2. Exercise I: Textical Modeling 3. Exercise II: Interactive Compilation 4. Exercise III: Simulation 5. Bonus Exercise IV: SCG Lego Mindstorms
SCCharts Tutorial, KIELER SCCharts 1. Tutorial Preparations 2. Exercise I: Textical Modeling 3. Exercise II: Interactive Compilation 4. Exercise III: Simulation 5. Bonus Exercise IV: SCG Lego Mindstorms
Embedded software design with Polychrony
 Embedded software design with Polychrony DATE 09 tutorial on Correct-by-Construction Embedded Software Synthesis: Formal Frameworks, Methodologies, and Tools Jean-Pierre Talpin, RIA List of contributors
Embedded software design with Polychrony DATE 09 tutorial on Correct-by-Construction Embedded Software Synthesis: Formal Frameworks, Methodologies, and Tools Jean-Pierre Talpin, RIA List of contributors
Model-based Code Generation: Esterel Scade. Daniel Kästner AbsInt Angewandte Informatik GmbH
 Model-based Code Generation: Esterel Scade Daniel Kästner kaestner@absint.com AbsInt Angewandte Informatik GmbH AbsInt GmbH 2 Model-based Software Development 3 Model is software specification. Hardware/Software
Model-based Code Generation: Esterel Scade Daniel Kästner kaestner@absint.com AbsInt Angewandte Informatik GmbH AbsInt GmbH 2 Model-based Software Development 3 Model is software specification. Hardware/Software
Specifications Part 1
 pm3 12 Specifications Part 1 Embedded System Design Kluwer Academic Publisher by Peter Marwedel TU Dortmund 2008/11/15 ine Marwedel, 2003 Graphics: Alexandra Nolte, Ges Introduction 12, 2008-2 - 1 Specification
pm3 12 Specifications Part 1 Embedded System Design Kluwer Academic Publisher by Peter Marwedel TU Dortmund 2008/11/15 ine Marwedel, 2003 Graphics: Alexandra Nolte, Ges Introduction 12, 2008-2 - 1 Specification
Modeling Statecharts and Activitycharts as Signal Equations
 Modeling Statecharts and Activitycharts as Signal Equations J.-R. BEAUVAIS IRISA/INRIA-Rennes E. RUTTEN INRIA Rhône-Alpes and T. GAUTIER, R. HOUDEBINE, P. LE GUERNIC, and Y.-M. TANG IRISA/INRIA-Rennes
Modeling Statecharts and Activitycharts as Signal Equations J.-R. BEAUVAIS IRISA/INRIA-Rennes E. RUTTEN INRIA Rhône-Alpes and T. GAUTIER, R. HOUDEBINE, P. LE GUERNIC, and Y.-M. TANG IRISA/INRIA-Rennes
Hardware Description Languages & System Description Languages Properties
 Hardware Description Languages & System Description Languages Properties There is a need for executable specification language that is capable of capturing the functionality of the system in a machine-readable
Hardware Description Languages & System Description Languages Properties There is a need for executable specification language that is capable of capturing the functionality of the system in a machine-readable
Towards Interactive Timing Analysis for Designing Reactive Systems
 Towards Interactive Timing Analysis for Designing Reactive Systems Insa Fuhrmann 1, David Broman 2,3, Steven Smyth 1, and Reinhard von Hanxleden 1 1 Christian-Albrechts-Universität zu Kiel, Germany 2 University
Towards Interactive Timing Analysis for Designing Reactive Systems Insa Fuhrmann 1, David Broman 2,3, Steven Smyth 1, and Reinhard von Hanxleden 1 1 Christian-Albrechts-Universität zu Kiel, Germany 2 University
Review of last lecture. Peer Quiz. DPHPC Overview. Goals of this lecture. Lock-based queue
 Review of last lecture Design of Parallel and High-Performance Computing Fall 2016 Lecture: Linearizability Motivational video: https://www.youtube.com/watch?v=qx2driqxnbs Instructor: Torsten Hoefler &
Review of last lecture Design of Parallel and High-Performance Computing Fall 2016 Lecture: Linearizability Motivational video: https://www.youtube.com/watch?v=qx2driqxnbs Instructor: Torsten Hoefler &
Reactive Web Programming
 Reactive Web Programming Colin Vidal colin.vidal@inria.fr INRIA Sophia Antipolis Supervisors : Manuel Serrano Gérard Berry December 2, 2015 1 / 14 JavaScript language A mainstream language to write web
Reactive Web Programming Colin Vidal colin.vidal@inria.fr INRIA Sophia Antipolis Supervisors : Manuel Serrano Gérard Berry December 2, 2015 1 / 14 JavaScript language A mainstream language to write web
Principles of Real-Time Programming
 Principles of Real-Time Programming Christoph M. Kirsch Department of Electrical Engineering and Computer Sciences University of California, Berkeley cm@eecs.berkeley.edu Abstract. Real-time programming
Principles of Real-Time Programming Christoph M. Kirsch Department of Electrical Engineering and Computer Sciences University of California, Berkeley cm@eecs.berkeley.edu Abstract. Real-time programming
Simulink/Stateflow. June 2008
 Simulink/Stateflow Paul Caspi http://www-verimag.imag.fr/ Pieter Mosterman http://www.mathworks.com/ June 2008 1 Introduction Probably, the early designers of Simulink in the late eighties would have been
Simulink/Stateflow Paul Caspi http://www-verimag.imag.fr/ Pieter Mosterman http://www.mathworks.com/ June 2008 1 Introduction Probably, the early designers of Simulink in the late eighties would have been
XEVE, an ESTEREL Verification Environment
 XEVE, an ESTEREL Verification Environment Amar Bouali INRIA, B.P. 93, F-06902 Sophia-Antipolis cedex amar@sophia, inria, fr Abstract. We describe the verification methods and tools we are currently developing
XEVE, an ESTEREL Verification Environment Amar Bouali INRIA, B.P. 93, F-06902 Sophia-Antipolis cedex amar@sophia, inria, fr Abstract. We describe the verification methods and tools we are currently developing
Relaxed Memory-Consistency Models
 Relaxed Memory-Consistency Models Review. Why are relaxed memory-consistency models needed? How do relaxed MC models require programs to be changed? The safety net between operations whose order needs
Relaxed Memory-Consistency Models Review. Why are relaxed memory-consistency models needed? How do relaxed MC models require programs to be changed? The safety net between operations whose order needs
A Multi-Threaded Reactive Processor
 Introduction The Kiel Esterel Processor Experimental Results and Outlook A Multi-Threaded Reactive Processor Reinhard v. Hanxleden Joint work with Xin Li* and Marian Boldt Real-Time Systems and Embedded
Introduction The Kiel Esterel Processor Experimental Results and Outlook A Multi-Threaded Reactive Processor Reinhard v. Hanxleden Joint work with Xin Li* and Marian Boldt Real-Time Systems and Embedded
Synchronous Estelle: Just Another Synchronous Language?
 Electronic Notes in Theoretical Computer Science 88 (2003) URL: http://www.elsevier.nl/locate/entcs/volume88.html 15 pages Synchronous Estelle: Just Another Synchronous Language? Miguel Riesco 1 Javier
Electronic Notes in Theoretical Computer Science 88 (2003) URL: http://www.elsevier.nl/locate/entcs/volume88.html 15 pages Synchronous Estelle: Just Another Synchronous Language? Miguel Riesco 1 Javier
A PRIMITIVE EXECUTION MODEL FOR HETEROGENEOUS MODELING
 A PRIMITIVE EXECUTION MODEL FOR HETEROGENEOUS MODELING Frédéric Boulanger Supélec Département Informatique, 3 rue Joliot-Curie, 91192 Gif-sur-Yvette cedex, France Email: Frederic.Boulanger@supelec.fr Guy
A PRIMITIVE EXECUTION MODEL FOR HETEROGENEOUS MODELING Frédéric Boulanger Supélec Département Informatique, 3 rue Joliot-Curie, 91192 Gif-sur-Yvette cedex, France Email: Frederic.Boulanger@supelec.fr Guy
Real-Time Programming Languages (ADA and Esterel as Examples)
") Real-Time Programming Languages (ADA and Esterel as Examples) Real-Time Systems, 2008 RT Languages, 1 RT Language Classes HLL suitable for RT-Analysis (e.g., rms or time-driven) Synchronous HLL (clock
Real-Time Programming Languages (ADA and Esterel as Examples) Real-Time Systems, 2008 RT Languages, 1 RT Language Classes HLL suitable for RT-Analysis (e.g., rms or time-driven) Synchronous HLL (clock
Efficient Synthesis of Production Schedules by Optimization of Timed Automata
 Efficient Synthesis of Production Schedules by Optimization of Timed Automata Inga Krause Institute of Automatic Control Engineering Technische Universität München inga.krause@mytum.de Joint Advanced Student
Efficient Synthesis of Production Schedules by Optimization of Timed Automata Inga Krause Institute of Automatic Control Engineering Technische Universität München inga.krause@mytum.de Joint Advanced Student
Review of last lecture. Goals of this lecture. DPHPC Overview. Lock-based queue. Lock-based queue
 Review of last lecture Design of Parallel and High-Performance Computing Fall 2013 Lecture: Linearizability Instructor: Torsten Hoefler & Markus Püschel TA: Timo Schneider Cache-coherence is not enough!
Review of last lecture Design of Parallel and High-Performance Computing Fall 2013 Lecture: Linearizability Instructor: Torsten Hoefler & Markus Püschel TA: Timo Schneider Cache-coherence is not enough!
CMSC Computer Architecture Lecture 15: Memory Consistency and Synchronization. Prof. Yanjing Li University of Chicago
 CMSC 22200 Computer Architecture Lecture 15: Memory Consistency and Synchronization Prof. Yanjing Li University of Chicago Administrative Stuff! Lab 5 (multi-core) " Basic requirements: out later today
CMSC 22200 Computer Architecture Lecture 15: Memory Consistency and Synchronization Prof. Yanjing Li University of Chicago Administrative Stuff! Lab 5 (multi-core) " Basic requirements: out later today
Project IST , COLUMBUS. Design of Embedded Controllers for Safety Critical Systems. Deliverables DMM1 and DMM2
 Project IST 200 3834, COLUMBUS Design of Embedded Controllers for Safety Critical Systems Deliverables DMM and DMM2 Report on formal framework of meta models resp. INRIA Authors: B. CAILLAUD (INRIA) and
Project IST 200 3834, COLUMBUS Design of Embedded Controllers for Safety Critical Systems Deliverables DMM and DMM2 Report on formal framework of meta models resp. INRIA Authors: B. CAILLAUD (INRIA) and
Compiling Esterel. Dumitru Potop-Butucaru. Stephen A. Edwards Gérard Berry
 Compiling Esterel Compiling Esterel Dumitru Potop-Butucaru Stephen A. Edwards Gérard Berry A C.I.P. Catalogue record for this book is available from the Library of Congress. ISBN 978-0-387-70626-9 (HB)
Compiling Esterel Compiling Esterel Dumitru Potop-Butucaru Stephen A. Edwards Gérard Berry A C.I.P. Catalogue record for this book is available from the Library of Congress. ISBN 978-0-387-70626-9 (HB)
Motivation was to facilitate development of systems software, especially OS development.
 A History Lesson C Basics 1 Development of language by Dennis Ritchie at Bell Labs culminated in the C language in 1972. Motivation was to facilitate development of systems software, especially OS development.
A History Lesson C Basics 1 Development of language by Dennis Ritchie at Bell Labs culminated in the C language in 1972. Motivation was to facilitate development of systems software, especially OS development.
Deterministic Concurrency: A Clock-Synchronised Shared Memory Approach
 Deterministic Concurrency: A Clock-Synchronised Shared Memory Approach Joaquín Aguado 1, Michael Mendler 1, Marc Pouzet 2, Partha Roop 3, and Reinhard von Hanxleden 4 1 Otto-Friedrich-Universität Bamberg,
Deterministic Concurrency: A Clock-Synchronised Shared Memory Approach Joaquín Aguado 1, Michael Mendler 1, Marc Pouzet 2, Partha Roop 3, and Reinhard von Hanxleden 4 1 Otto-Friedrich-Universität Bamberg,
Re-engineering engineering Home Service Robots Improving Software Reliability: A Case Study. Moonzoo Kim, etc
 Re-engineering engineering Home Service Robots Improving Software Reliability: A Case Study Moonzoo Kim, etc Agenda Introduction Re-engineering engineering Software Architecture Control Plane Re-engineering
Re-engineering engineering Home Service Robots Improving Software Reliability: A Case Study Moonzoo Kim, etc Agenda Introduction Re-engineering engineering Software Architecture Control Plane Re-engineering
Research Article Removing Cycles in Esterel Programs
 Hindawi Publishing Corporation EURASIP Journal on Embedded Systems Volume 2007, Article ID 48979, 23 pages doi:10.1155/2007/48979 Research Article Removing Cycles in Esterel Programs Jan Lukoschus and
Hindawi Publishing Corporation EURASIP Journal on Embedded Systems Volume 2007, Article ID 48979, 23 pages doi:10.1155/2007/48979 Research Article Removing Cycles in Esterel Programs Jan Lukoschus and
How useful is the UML profile SPT without Semantics? 1
 How useful is the UML profile SPT without Semantics? 1 Susanne Graf, Ileana Ober VERIMAG 2, avenue de Vignate - F-38610 Gières - France e-mail:{susanne.graf, Ileana.Ober}@imag.fr http://www-verimag.imag.fr/~{graf,iober}
How useful is the UML profile SPT without Semantics? 1 Susanne Graf, Ileana Ober VERIMAG 2, avenue de Vignate - F-38610 Gières - France e-mail:{susanne.graf, Ileana.Ober}@imag.fr http://www-verimag.imag.fr/~{graf,iober}
Programming and Timing Analysis of Parallel Programs on Multicores
 Programming and Timing Analysis of Parallel Programs on Multicores Eugene Yip, Partha Roop, Morteza Biglari-Abhari, Alain Girault To cite this version: Eugene Yip, Partha Roop, Morteza Biglari-Abhari,
Programming and Timing Analysis of Parallel Programs on Multicores Eugene Yip, Partha Roop, Morteza Biglari-Abhari, Alain Girault To cite this version: Eugene Yip, Partha Roop, Morteza Biglari-Abhari,
A Deterministic Concurrent Language for Embedded Systems
 A Deterministic Concurrent Language for Embedded Systems Stephen A. Edwards Columbia University Joint work with Olivier Tardieu SHIM:A Deterministic Concurrent Language for Embedded Systems p. 1/38 Definition
A Deterministic Concurrent Language for Embedded Systems Stephen A. Edwards Columbia University Joint work with Olivier Tardieu SHIM:A Deterministic Concurrent Language for Embedded Systems p. 1/38 Definition
Hardware Description Languages & System Description Languages Properties
 Hardware Description Languages & System Description Languages Properties There is a need for executable specification language that is capable of capturing the functionality of the system in a machine-readable
Hardware Description Languages & System Description Languages Properties There is a need for executable specification language that is capable of capturing the functionality of the system in a machine-readable
Remote Control. IMMS.de
 Remote Control Statecharts Kurzdefinition [Harel88]: Statecharts = state-diagrams + depth + orthogonality + broadcast communication Statecharts Elements (1) Events (e.g. txt)» Typeless» no value (it exists
Remote Control Statecharts Kurzdefinition [Harel88]: Statecharts = state-diagrams + depth + orthogonality + broadcast communication Statecharts Elements (1) Events (e.g. txt)» Typeless» no value (it exists
State Machine Diagrams
 State Machine Diagrams Introduction A state machine diagram, models the dynamic aspects of the system by showing the flow of control from state to state for a particular class. 2 Introduction Whereas an
State Machine Diagrams Introduction A state machine diagram, models the dynamic aspects of the system by showing the flow of control from state to state for a particular class. 2 Introduction Whereas an
EE249 Lab September 30 h, 2008 Hugo A. Andrade
 High-Level Development Tools Data Flow C Code Textual Math Modeling Statechart EE249 Lab September 30 h, 2008 Hugo A. Andrade Graphical System Design Platform Linux Macintosh Windows Real-Time FPGA Micro
High-Level Development Tools Data Flow C Code Textual Math Modeling Statechart EE249 Lab September 30 h, 2008 Hugo A. Andrade Graphical System Design Platform Linux Macintosh Windows Real-Time FPGA Micro
Overview: Memory Consistency
 Overview: Memory Consistency the ordering of memory operations basic definitions; sequential consistency comparison with cache coherency relaxing memory consistency write buffers the total store ordering
Overview: Memory Consistency the ordering of memory operations basic definitions; sequential consistency comparison with cache coherency relaxing memory consistency write buffers the total store ordering
A Time-Triggered View. Peter PUSCHNER
 Predictable Timing on MPSoC A Time-Triggered View Peter PUSCHNER 1 st Workshop on Mapping Applications to MPSoCs Schloss Rheinfels, Germany June 2008 Focus goal: build safety-critical hard real-time systems
Predictable Timing on MPSoC A Time-Triggered View Peter PUSCHNER 1 st Workshop on Mapping Applications to MPSoCs Schloss Rheinfels, Germany June 2008 Focus goal: build safety-critical hard real-time systems
Orccad Control Architecture
 In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Orccad Control Architecture K. Kapellos
In Proceedings of the 9th ESA Workshop on Advanced Space Technologies for Robotics and Automation 'ASTRA 2006' ESTEC, Noordwijk, The Netherlands, November 28-30, 2006 Orccad Control Architecture K. Kapellos
D7020E. Robust and Energy-Efficient Real-Time Systems D7020E. Lecture 2: Components & the Timber language
 Robust and Energy-Efficient Real-Time Systems Lecture 2: Components & the Timber language 1 1 Recall The dynamic evolution of a system... with offset asynchronous calls synchronous call T T blocked buffered
Robust and Energy-Efficient Real-Time Systems Lecture 2: Components & the Timber language 1 1 Recall The dynamic evolution of a system... with offset asynchronous calls synchronous call T T blocked buffered
D7020E. The dynamic evolution of a system Robust and Energy-Efficient Real-Time Systems. blocked Lecture 2: Components & the Timber language.
 Recall The dynamic evolution of a system Robust and Energy-Efficient Real-Time Systems with offset asynchronous calls synchronous call T T blocked Lecture 2: Components & the Timber language buffered??
Recall The dynamic evolution of a system Robust and Energy-Efficient Real-Time Systems with offset asynchronous calls synchronous call T T blocked Lecture 2: Components & the Timber language buffered??
Programming Embedded Systems
 Programming Embedded Systems Lecture 10 An introduction to Lustre Wednesday Feb 15, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Course topic: programming lang. Which language to
Programming Embedded Systems Lecture 10 An introduction to Lustre Wednesday Feb 15, 2012 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Course topic: programming lang. Which language to
ECL: A SPECIFICATION ENVIRONMENT FOR SYSTEM-LEVEL DESIGN
 / ECL: A SPECIFICATION ENVIRONMENT FOR SYSTEM-LEVEL DESIGN Gerard Berry Ed Harcourt Luciano Lavagno Ellen Sentovich Abstract We propose a new specification environment for system-level design called ECL.
/ ECL: A SPECIFICATION ENVIRONMENT FOR SYSTEM-LEVEL DESIGN Gerard Berry Ed Harcourt Luciano Lavagno Ellen Sentovich Abstract We propose a new specification environment for system-level design called ECL.
Behavioral Specification of a Circuit using SyncCharts: A Case Study
 Behavioral Specification of a Circuit using SyncCharts: A Case Study Charles André, Marie-Agnès Peraldi-Frati I3S Laboratory - University of Nice Sophia-Antipolis / CNRS 2000 route des Lucioles, BP 121
Behavioral Specification of a Circuit using SyncCharts: A Case Study Charles André, Marie-Agnès Peraldi-Frati I3S Laboratory - University of Nice Sophia-Antipolis / CNRS 2000 route des Lucioles, BP 121
An Introduction to Lustre
 An Introduction to Lustre Monday Oct 06, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/35 ES Programming languages Which language to write embedded software in? Traditional: low-level
An Introduction to Lustre Monday Oct 06, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/35 ES Programming languages Which language to write embedded software in? Traditional: low-level