LAMPIRAN A PROGRAM PELATIHAN DAN PENGUJIAN
|
|
|
- Cynthia Booth
- 5 years ago
- Views:
Transcription
1 LAMPIRAN A PROGRAM PELATIHAN DAN PENGUJIAN
2 Program Preprocessing Image clc; clear all; % Preprocessing Image daniel{1}=imread('daniel1.bmp'); daniel{2}=imread('daniel2.bmp'); daniel{3}=imread('daniel3.bmp'); daniel{4}=imread('daniel4.bmp'); for i1=1:4 GR{1,i1}=rgb2gray(daniel{i1}) ; BW{1,i1}=im2bw(GR{1,i1}); im{1,i1}=imresize(bw{1,i1},[ ]) brs{1,i1}=im{1,i1}(:); klm{1,i1}=brs{1,i1}'; jan{1}=imread('jan1.bmp'); jan{2}=imread('jan2.bmp'); jan{3}=imread('jan3.bmp'); jan{4}=imread('jan4.bmp'); for i2=1:4 GR{2,i2}=rgb2gray(jan{i2}) BW{2,i2}=im2bw(GR{2,i2}); im{2,i2}=imresize(bw{2,i2},[ ]) brs{2,i2}=im{2,i2}(:); klm{2,i2}=brs{2,i2}'; danielh{1}=imread('danielh1.bmp'); danielh{2}=imread('danielh2.bmp'); danielh{3}=imread('danielh3.bmp'); danielh{4}=imread('danielh4.bmp'); for i3=1:4 GR{3,i3}=rgb2gray(danielh{i3}) ; BW{3,i3}=im2bw(GR{3,i3}); im{3,i3}=imresize(bw{3,i3},[ ]) brs{3,i3}=im{3,i3}(:); klm{3,i3}=brs{3,i3}'; yance{1}=imread('yance1.bmp'); yance{2}=imread('yance2.bmp'); yance{3}=imread('yance3.bmp'); yance{4}=imread('yance4.bmp'); for i4=1:4 GR{4,i4}=rgb2gray(yance{i4}) ; BW{4,i4}=im2bw(GR{4,i4}); im{4,i4}=imresize(bw{4,i4},[ ]) brs{4,i4}=im{4,i4}(:); klm{4,i4}=brs{4,i4}'; agus{1}=imread('agus1.bmp'); agus{2}=imread('agus2.bmp'); agus{3}=imread('agus3.bmp'); agus{4}=imread('agus4.bmp');
3 for i5=1:4 GR{5,i5}=rgb2gray(agus{i5}) ; BW{5,i5}=im2bw(GR{5,i5}); im{5,i5}=imresize(bw{5,i5},[ ]) brs{5,i5}=im{5,i5}(:); klm{5,i5}=brs{5,i5}'; alfianto{1}=imread('alfianto1.bmp'); alfianto{2}=imread('alfianto2.bmp'); alfianto{3}=imread('alfianto3.bmp'); alfianto{4}=imread('alfianto4.bmp'); for i6=1:4 GR{6,i6}=rgb2gray(alfianto{i6}) ; BW{6,i6}=im2bw(GR{6,i6}); im{6,i6}=imresize(bw{6,i6},[ ]) brs{6,i6}=im{6,i6}(:); klm{6,i6}=brs{6,i6}'; tony{1}=imread('tony1.bmp'); tony{2}=imread('tony2.bmp'); tony{3}=imread('tony3.bmp'); tony{4}=imread('tony4.bmp'); for i7=1:4 GR{7,i7}=rgb2gray(tony{i7}) ; BW{7,i7}=im2bw(GR{7,i7}); im{7,i7}=imresize(bw{7,i7},[ ]) brs{7,i7}=im{7,i7}(:); klm{7,i7}=brs{7,i7}'; gerald{1}=imread('gerald1.bmp'); gerald{2}=imread('gerald2.bmp'); gerald{3}=imread('gerald3.bmp'); gerald{4}=imread('gerald4.bmp'); for i8=1:4 GR{8,i8}=rgb2gray(gerald{i8}) ; BW{8,i8}=im2bw(GR{8,i8}); im{8,i8}=imresize(bw{8,i8},[ ]) brs{8,i8}=im{8,i8}(:); klm{8,i8}=brs{8,i8}'; gelar{1}=imread('gelar1.bmp'); gelar{2}=imread('gelar2.bmp'); gelar{3}=imread('gelar3.bmp'); gelar{4}=imread('gelar4.bmp'); for i9=1:4 GR{9,i9}=rgb2gray(gelar{i9}) ; BW{9,i9}=im2bw(GR{9,i9}); im{9,i9}=imresize(bw{9,i9},[ ]) brs{9,i9}=im{9,i9}(:); klm{9,i9}=brs{9,i9}'; nofan{1}=imread('nofan1.bmp');
4 nofan{2}=imread('nofan2.bmp'); nofan{3}=imread('nofan3.bmp'); nofan{4}=imread('nofan4.bmp'); for i10=1:4 GR{10,i10}=rgb2gray(nofan{i10}) BW{10,i10}=im2bw(GR{10,i10}); im{10,i10}=imresize(bw{10,i10},[ ]) brs{10,i10}=im{10,i10}(:); klm{10,i10}=brs{10,i10}'; im1=klm' klm=im1(:) im=klm' save preproses im Program Preprocessing Image clc; clear all; % Preprocessing, mencari nilai moment central & 7 nilai moment invariant load preproses im t=length(im) for i=1:t [r,c] = find(im{i}==1); rbar = mean(r); cbar = mean(c); n = length(r); % nilai X & Y % mean X % mean Y % proses mencari nilai moment central momlist = zeros(n,1); for m = 1 : n; momlist00(m) = (r(m) - rbar)^0 * (c(m) - cbar)^0; momlist10(m) = (r(m) - rbar)^1 * (c(m) - cbar)^0; momlist01(m) = (r(m) - rbar)^0 * (c(m) - cbar)^1; momlist11(m) = (r(m) - rbar)^1 * (c(m) - cbar)^1; momlist12(m) = (r(m) - rbar)^1 * (c(m) - cbar)^2; momlist21(m) = (r(m) - rbar)^2 * (c(m) - cbar)^1; momlist20(m) = (r(m) - rbar)^2 * (c(m) - cbar)^0; momlist02(m) = (r(m) - rbar)^0 * (c(m) - cbar)^2; momlist30(m) = (r(m) - rbar)^3 * (c(m) - cbar)^0; momlist03(m) = (r(m) - rbar)^0 * (c(m) - cbar)^3; % moment central tingkat ke m00 = sum(momlist00); m10 = sum(momlist10); m01 = sum(momlist01); % moment central pusat m00 % moment central pusat m10 % moment central pusat m01 % syarat moment central tingkat 2 & 3 (p+q>=2)yang di normalisasi m11 = sum(momlist11); % moment central tingkat ke 2 m12 = sum(momlist12); % moment central tingkat ke 3
5 m21 = sum(momlist21); % moment central tingkat ke 3 m20 = sum(momlist20); % moment central tingkat ke 2 m02 = sum(momlist02); % moment central tingkat ke 2 m30 = sum(momlist30); % moment central tingkat ke 3 m03 = sum(momlist03); % moment central tingkat ke 3 % proses normalisasi moment central tingkat ke 2 & 3 % area = bwarea(bw). salah satu cara mencari moment central pusat ke 0 (m00) area = bwarea(im{i}); u11 = m11 / (area^2); u12 = m12 / (area^2.5); u21 = m21 / (area^2.5); u20 = m20 / (area^2); u02 = m02 / (area^2); u30 = m30 / (area^2.5); u03 = m03 / (area^2.5); % proses perhitungan 7 moment invariant h1 = u20 + u02; h2 = (u20-u02)^2 + 4*u11^2; h3 = (u30-3*u12)^2 + (u03-3*u21)^2; h4 = (u30 + u12)^2 + (u03 + u21)^2; h5 = (u30-3*u12) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) + (3*u21 - u03) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); h6 = (u20 - u02) * ( (u30 + u12)^2 - (u03 + u21)^2 ) + 4*u11 * (u30 + u12) * (u03 + u21); h7 = (3*u21 - u03) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) - (3*u12 - u30) * (u03 + u21) * ( 3*(u30 + u12)^2- (u03 + u21)^2 ); moment{i}=[ h1 h2 h3 h4 h5 h6 h7] global moment format long save moment Program Pelatihan Back Propagation %% ==Step_0==Inisialisasi================================= clc clear all load moment input=[]; input3=[]; for j=1:20 input1=[]; input1=im{j}; input4=[]; input3=[input3;input1]; n = 7; %INPUT p = 4; m = 4; % OUTPUT
6 alpha = ; e = 0.05; % error limit % %%% Inisialisasi Input & Target x = [input3]; t = [ 0; 0; 1; 1; ; ; ; ; ; ; ; ; 0 ;0 ; ; ; 1 ;1 ; ; ;]; tr = size(x,1); % %%% Inisialisasi %update bobot vi=length(vv); vv=(0.5-( rand(n,p)*((0.5)-(-0.5))) ); v0 = (0.5-( rand(1,p)*((0.5)-(-0.5))) ); w = rand(p,m) ; w0 = rand(1,m); for jj=1:p c(jj)=0 for ii=1:n c(jj)=c(jj)+(vv(ii,jj).^2); xx(jj)=sqrt(c(jj)); b=0.7*((sqrt(j)).^2); bb=2.212; v(ii,jj)=(bb*vv(ii,jj))/xx(jj); %%% hidden Layer pertama zin = zeros(tr,p); z = zeros(tr,p); din = zeros(tr,p); dj = zeros(tr,p); chv = zeros(n,p); chv0 = zeros(1,p); %%%Output Layer yin = zeros(tr,m); y = zeros(tr,m); d = zeros(tr,m); chw = zeros(p,m); chw0 = zeros(1,m); error=zeros(tr,m); iteration =1; er = 0; error = 0; %% ==Step_1==================================================== while er==0 iteration errormax(iteration) = max(max(error)); disp(sprintf('max err : %d', errormax(iteration))); %%% ==Step_2==================================================== for Tp=1:tr; %% Feed forward: %%% ==Step_3==================================================== %%% ==Step_4================================================== %%% First Layer for j=1:p zin(tp,j) = 0; for i=1:n
7 zin(tp,j) = zin(tp,j) + x(tp,i) * v(i,j); zin(tp,j) = v0(j) + zin(tp,j); z(tp,j) = (2/(1+exp(-zin(Tp,j))))-1; %aktivasi function Z %%% ==Step_5================================================== %%% Output Layer for k=1:m yin(tp,k) = 0; for j=1:p yin(tp,k) = yin(tp,k) + z(tp,j) * w(j,k); yin(tp,k) = w0(k) + yin(tp,k); y(tp,k) = 1/(1+exp(-yin(Tp,k))); %aktivasi function Y %% Backpropagation error %%% ==Step_6================================================== for k=1:m d(tp,k) = 0; d(tp,k) = (t(tp,k) - y(tp,k)) * (y(tp,k) *(1 - y(tp,k))); for j=1:p chw(j,k) = alpha * d(tp,k) * z(tp,j); chw0(k) = alpha * d(tp,k); %%% ==Step_7================================================== for j=1:p din(tp,j) = 0; for k=1:m din(tp,j) = din(tp,j) + d(tp,k) * w(j,k); dj(tp,j) = 0; dj(tp,j) = (din(tp,j) * ((1/2) * (1 + z(tp,j))* (1 - z(tp,j)))); for i=1:n chv(i,j) = alpha * dj(tp,j) * x(tp,i); chv0(j) = alpha * dj(tp,j); %% ==Step_8==Update_bobot dan bias======================== for k=1:m for j=1:p w(j,k)=w(j,k)+chw(j,k); w0(k)=w0(k)+chw0(k); for j=1:p for i=1:n v(i,j)=v(i,j)+chv(i,j); v0(j)=v0(j)+chv0(j); %% ==Step_9==Test_stop_kondisi========================== for k=1:m error(tp,k) =sqrt((t(tp,k)-y(tp,k)).^2); if max(max(error)) < e er =1; else er = 0; if (~mod(iteration,20000)) figure plot(1:20000,errormax(iteration-19999:iteration)) getframe;% F(iteration) = potongframe;
8 iteration = iteration +1; if (iteration > 1000) break for k=1:m if y(tp,k) < 0.5 y(tp,k)=0; else y(tp,k)=1; y save langsung11 v save langsung22 w save langsung12 v0 save langsung21 w0 save('weight6040.dat','v','v0','w','w0') erline = ones(1,size(errormax,2))*0.05; clf('reset'), cla reset plot(1:size(errormax,2),errormax,1:size(errormax,2),erline,'r') xlabel('iteration '), ylabel('error '), title('plot of the error') Program Pengujian Back Propagation %% ==Step_0==Inisialisasi================================= clc clear all % test tanda tangan tanpa moment invariant % load preproses im load ramdan11 moment22 load jan11 moment11 load langsung11 v load langsung22 w load langsung12 v0 load langsung21 w0 % % input=[]; % input3=[]; % for j=1:4 % input1=[]; % input1=moment{j}; % input4=[]; % input3=[input3;input1]; % n = 14; %INPUT p = 2; m = 4; % OUTPUT alpha = ; e = 0.05; % error limit % %%% Inisialisasi Input & Target x1=moment22 x2=moment11 x = [x1 ; x2]; t=[ 1; ]; tr = size(x,1);
9 % %%% hidden Layer pertama zin = zeros(tr,p); z = zeros(tr,p); din = zeros(tr,p); dj = zeros(tr,p); chv = zeros(n,p); chv0 = zeros(1,p); %%%Output Layer yin = zeros(tr,m); y = zeros(tr,m); d = zeros(tr,m); chw = zeros(p,m); chw0 = zeros(1,m); error=zeros(tr,m); iteration =1; er = 0; error = 0; %% ==Step_1==================================================== %%% ==Step_2==================================================== for Tp=1:tr; %% Feed forward: %%% ==Step_3==================================================== %%% ==Step_4==================================================== %%% First Layer for j=1:p zin(tp,j) = 0; for i=1:n zin(tp,j) = zin(tp,j) + x(tp,i) * v(i,j); zin(tp,j) = v0(j) + zin(tp,j); z(tp,j) = (2/(1+exp(-zin(Tp,j))))-1; %aktivasi function Z %%% ==Step_5================================================== %%% Output Layer for k=1:m yin(tp,k) = 0; for j=1:p yin(tp,k) = yin(tp,k) + z(tp,j) * w(j,k); yin(tp,k) = w0(k) + yin(tp,k); y(tp,k) = 1/(1+exp(-yin(Tp,k))); %aktivasi function Y %% ==Step_9==Test_stop_kondisi========================== for k=1:m error(tp,k) =sqrt((t(tp,k)-y(tp,k)).^2); for k=1:m if y(k) < 0.5 y(k)=0; else y(k)=1 y errors=sum(error)/4 global y format short
10 Program Pelatihan GUI % *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one % instance to run (singleton)". % % See also: GUIDE, GUIDATA, GUIHANDLES % Edit the above text to modify the response to help guinyobanyoba % Last Modified by GUIDE v Feb :28:17 % Begin initialization code - DO NOT EDIT gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_layoutfcn', [],... 'gui_callback', []); if nargin && ischar(varargin{1}) gui_state.gui_callback = str2func(varargin{1}); if nargout [varargout{1:nargout}] = gui_mainfcn(gui_state, varargin{:}); else gui_mainfcn(gui_state, varargin{:}); % End initialization code - DO NOT EDIT % Preprocessing, mencari nilai moment central & 7 nilai moment invariant % Image prosessing load preproses2 klm t=length(klm) for i=1:t [r,c] = find(klm{i}==1); rbar = mean(r); cbar = mean(c); n = length(r); % nilai X & Y % mean X % mean Y % proses mencari nilai moment central momlist = zeros(n,1); for m = 1 : n; momlist00(m) = (r(m) - rbar)^0 * (c(m) - cbar)^0; momlist10(m) = (r(m) - rbar)^1 * (c(m) - cbar)^0; momlist01(m) = (r(m) - rbar)^0 * (c(m) - cbar)^1; momlist11(m) = (r(m) - rbar)^1 * (c(m) - cbar)^1; momlist12(m) = (r(m) - rbar)^1 * (c(m) - cbar)^2; momlist21(m) = (r(m) - rbar)^2 * (c(m) - cbar)^1; momlist20(m) = (r(m) - rbar)^2 * (c(m) - cbar)^0; momlist02(m) = (r(m) - rbar)^0 * (c(m) - cbar)^2; momlist30(m) = (r(m) - rbar)^3 * (c(m) - cbar)^0; momlist03(m) = (r(m) - rbar)^0 * (c(m) - cbar)^3; % moment central tingkat ke
11 m00 = sum(momlist00); m10 = sum(momlist10); m01 = sum(momlist01); % moment central pusat m00 % moment central pusat m10 % moment central pusat m01 % syarat moment central tingkat kedua & ketiga (p+q>=2)yang di normalisasi m11 = sum(momlist11); % moment central tingkat ke 2 m12 = sum(momlist12); % moment central tingkat ke 3 m21 = sum(momlist21); % moment central tingkat ke 3 m20 = sum(momlist20); % moment central tingkat ke 2 m02 = sum(momlist02); % moment central tingkat ke 2 m30 = sum(momlist30); % moment central tingkat ke 3 m03 = sum(momlist03); % moment central tingkat ke 3 % proses perhitungan normalisasi moment central tingkat ke 2 & 3 % area = bwarea(bw) salah satu cara mencari moment central pusat ke 0 (m00) area = bwarea(klm{i}); u11 = m11 / (area^2); % normalize moment central tingkat ke 2 u12 = m12 / (area^2.5); % normalize moment central tingkat ke 3 u21 = m21 / (area^2.5); % normalize moment central tingkat ke 3 u20 = m20 / (area^2); % normalize moment central tingkat ke 2 u02 = m02 / (area^2); % normalize moment central tingkat ke 2 u30 = m30 / (area^2.5); % normalize moment central tingkat ke 3 u03 = m03 / (area^2.5); % normalize moment central tingkat ke 3 % proses perhitungan 7 moment invariant h1 = u20 + u02; h2 = (u20-u02)^2 + 4*u11^2; h3 = (u30-3*u12)^2 + (u03-3*u21)^2; h4 = (u30 + u12)^2 + (u03 + u21)^2; h5 = (u30-3*u12) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) + (3*u21 - u03) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); h6 = (u20 - u02) * ( (u30 + u12)^2 - (u03 + u21)^2 ) + 4*u11 * (u30 + u12) * (u03 + u21); h7 = (3*u21 - u03) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) - (3*u12 - u30) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); moment1{i}=[ h1 h2 h3 h4 h5 h6 h7 ] cc=moment1{i}(:) global moment format long save long moment1 set(handles.listbox3,'string',cc); function edit1_callback(hobject, eventdata, handles) % hobject handle to edit1 (see GCBO) % Hints: get(hobject,'string') returns contents of edit1 as text % str2double(get(hobject,'string')) returns contents of edit1 as a double % --- Executes during object creation, after setting all properties. function edit1_createfcn(hobject, eventdata, handles) % hobject handle to edit1 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER.
12 if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on button press in pushbutton2. function pushbutton2_callback(hobject, eventdata, handles) % hobject handle to pushbutton2 (see GCBO) % load otomatic1 moment1 load long moment1 input=[]; input3=[]; for j=1:20 input1=[]; input1=moment1{j}; input4=[]; input3=[input3;input1]; n = 7; %INPUT p = 2; m = 4; % OUTPUT alpha = ; e = 0.001; % error limit % %%% Inisialisasi Input & Target x = [input3 ]; % t=[ 0; 0]; t = [ 0; 0; 1; 1; ; ; ; ; ; ; ; ; 0 ;0 ; ; ; 1 ;1 ; ; ; ]; tr = size(x,1); % %%% Inisialisasi %update bobot vi=length(vv); vv=(0.5-( rand(n,p)*((0.5)-(-0.5))) ); v0 = (0.5-( rand(1,p)*((0.5)-(-0.5))) ); w = rand(p,m) ; w0 = rand(1,m); for jj=1:p c(jj)=0 for ii=1:n c(jj)=c(jj)+(vv(ii,jj).^2); xx(jj)=sqrt(c(jj)); b=0.7*((sqrt(j)).^2); bb=2.212; v(ii,jj)=(bb*vv(ii,jj))/xx(jj);
13 %%% hidden Layer pertama zin = zeros(tr,p); z = zeros(tr,p); din = zeros(tr,p); dj = zeros(tr,p); chv = zeros(n,p); chv0 = zeros(1,p); %%%Output Layer yin = zeros(tr,m); y = zeros(tr,m); d = zeros(tr,m); chw = zeros(p,m); chw0 = zeros(1,m); error=zeros(tr,m); iteration =1; er = 0; error = 0; %% ==Step_1==================================================== while er==0 iteration errormax(iteration) = max(max(error)); disp(sprintf('max err : %d', errormax(iteration))); %%% ==Step_2==================================================== for Tp=1:tr; %% Feed forward: %%% ==Step_3==================================================== %%% ==Step_4================================================== %%% First Layer for j1=1:p zin(tp,j1) = 0; for i=1:n zin(tp,j1) = zin(tp,j1) + x(tp,i) * v(i,j1); zin(tp,j1) = v0(j1) + zin(tp,j1); z(tp,j1) = (2/(1+exp(-zin(Tp,j1))))-1; %aktivasi function Z %%% ==Step_5================================================== %%% Output Layer for k=1:m yin(tp,k) = 0; for j5=1:p yin(tp,k) = yin(tp,k) + z(tp,j5) * w(j5,k); yin(tp,k) = w0(k) + yin(tp,k); y(tp,k) = 1/(1+exp(-yin(Tp,k))); %aktivasi function Y %% Backpropagation error %%% ==Step_6================================================== for k=1:m d(tp,k) = 0; d(tp,k) = (t(tp,k) - y(tp,k)) * (y(tp,k) *(1 - y(tp,k))); for j6=1:p chw(j6,k) = alpha * d(tp,k) * z(tp,j6); chw0(k) = alpha * d(tp,k); %%% ==Step_7================================================== for j2=1:p din(tp,j2) = 0; for k=1:m din(tp,j2) = din(tp,j2) + d(tp,k) * w(j2,k); dj(tp,j2) = 0; dj(tp,j2) = (din(tp,j2) * ((1/2) * (1 + z(tp,j2))* (1 - z(tp,j2)))); for i=1:n chv(i,j2) = alpha * dj(tp,j2) * x(tp,i); chv0(j2) = alpha * dj(tp,j2); %% ==Step_8==Update_bobot dan bias======================== for k=1:m
14 for j3=1:p w(j3,k)=w(j3,k)+chw(j3,k); w0(k)=w0(k)+chw0(k); for j3=1:p for i=1:n v(i,j3)=v(i,j3)+chv(i,j3); v0(j3)=v0(j3)+chv0(j3); %% ==Step_9==Test_stop_kondisi========================== for k=1:m error(tp,k) =sqrt((t(tp,k)-y(tp,k)).^2); if max(max(error)) < e er =1; else er = 0; % if (~mod(iteration,20000)) % figure % plot(1:20000,errormax(iteration-19999:iteration)) % getframe;% F(iteration) = potongframe; % iteration = iteration +1; if (iteration > ) break for k=1:m if y(tp,k) < 0.5 y(tp,k)=0; else y(tp,k)=1; y save bobota v save bobotb v0 save bobotc w save bobotd w0 z=y(:); z1=error(:); axes(handles.axes1); erline = ones(1,size(errormax,2))*0.05; plot(1:size(errormax,2),errormax,1:size(errormax,2),erline,'r') xlabel('iteration '), ylabel('error '), title('plot of the error') set(handles.edit1,'string',z1); set(handles.listbox2,'string',z); % --- Executes on slider movement. function listbox1_callback(hobject, eventdata, handles) % hobject handle to listbox1 (see GCBO) % Hints: get(hobject,'value') returns position of slider % get(hobject,'min') and get(hobject,'max') to determine range of slider
15 % --- Executes during object creation, after setting all properties. function listbox1_createfcn(hobject, eventdata, handles) % hobject handle to listbox1 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: slider controls usually have a light gray background. if isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor',[.9.9.9]); % --- Executes on selection change in listbox2. function listbox2_callback(hobject, eventdata, handles) % hobject handle to listbox2 (see GCBO) % Hints: contents = get(hobject,'string') returns listbox2 contents as cell array % contents{get(hobject,'value')} returns selected item from listbox2 % --- Executes during object creation, after setting all properties. function listbox2_createfcn(hobject, eventdata, handles) % hobject handle to listbox2 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: listbox controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on button press in pushbutton3. function pushbutton3_callback(hobject, eventdata, handles) % hobject handle to pushbutton3 (see GCBO) selection=questdlg(['keluar...file...',get(handles.figure1,'name') '?'],['Keluar...',get(handles.figure1,'Name') '...'],'Ya','Tidak','Ya'); if strcmp(selection,'tidak') return; delete(handles.figure1) % --- Executes on slider movement. function slider1_callback(hobject, eventdata, handles) % hobject handle to slider1 (see GCBO) % Hints: get(hobject,'value') returns position of slider % get(hobject,'min') and get(hobject,'max') to determine range of slider % --- Executes during object creation, after setting all properties. function slider1_createfcn(hobject, eventdata, handles) % hobject handle to slider1 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: slider controls usually have a light gray background. if isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor'))
16 set(hobject,'backgroundcolor',[.9.9.9]); % function Untitled_1_Callback(hObject, eventdata, handles) % hobject handle to Untitled_1 (see GCBO) % function Untitled_2_Callback(hObject, eventdata, handles) % hobject handle to Untitled_2 (see GCBO) % function Untitled_3_Callback(hObject, eventdata, handles) % hobject handle to Untitled_3 (see GCBO) % --- Executes on button press in pushbutton5. function pushbutton5_callback(hobject, eventdata, handles) % hobject handle to pushbutton5 (see GCBO) % --- Executes on selection change in listbox3. function listbox3_callback(hobject, eventdata, handles) % hobject handle to listbox3 (see GCBO) % Hints: contents = get(hobject,'string') returns listbox3 contents as cell array % contents{get(hobject,'value')} returns selected item from listbox3 % --- Executes during object creation, after setting all properties. function listbox3_createfcn(hobject, eventdata, handles) % hobject handle to listbox3 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: listbox controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on button press in pushbutton6. function pushbutton6_callback(hobject, eventdata, handles) % hobject handle to pushbutton6 (see GCBO) load preproses2 klm klm1=rot90(klm); t=length(klm) for i=1:t [r,c] = find(klm{i}==1); rbar = mean(r); cbar = mean(c); % nilai X & Y % mean X % mean Y
17 n = length(r); % proses mencari nilai moment central momlist = zeros(n,1); for m = 1 : n; momlist00(m) = (r(m) - rbar)^0 * (c(m) - cbar)^0; momlist10(m) = (r(m) - rbar)^1 * (c(m) - cbar)^0; momlist01(m) = (r(m) - rbar)^0 * (c(m) - cbar)^1; momlist11(m) = (r(m) - rbar)^1 * (c(m) - cbar)^1; momlist12(m) = (r(m) - rbar)^1 * (c(m) - cbar)^2; momlist21(m) = (r(m) - rbar)^2 * (c(m) - cbar)^1; momlist20(m) = (r(m) - rbar)^2 * (c(m) - cbar)^0; momlist02(m) = (r(m) - rbar)^0 * (c(m) - cbar)^2; momlist30(m) = (r(m) - rbar)^3 * (c(m) - cbar)^0; momlist03(m) = (r(m) - rbar)^0 * (c(m) - cbar)^3; % moment central tingkat ke m00 = sum(momlist00); m10 = sum(momlist10); m01 = sum(momlist01); % moment central pusat m00 % moment central pusat m10 % moment central pusat m01 % syarat moment central tingkat kedua & ketiga (p+q>=2)yang di normalisasi m11 = sum(momlist11); % moment central tingkat ke 2 m12 = sum(momlist12); % moment central tingkat ke 3 m21 = sum(momlist21); % moment central tingkat ke 3 m20 = sum(momlist20); % moment central tingkat ke 2 m02 = sum(momlist02); % moment central tingkat ke 2 m30 = sum(momlist30); % moment central tingkat ke 3 m03 = sum(momlist03); % moment central tingkat ke 3 % proses perhitungan normalisasi moment central tingkat ke 2 & 3 % area = bwarea(bw) salah satu cara mencari moment central pusat ke 0 (m00) area = bwarea(klm{i}); u11 = m11 / (area^2); % normalize moment central tingkat ke 2 u12 = m12 / (area^2.5); % normalize moment central tingkat ke 3 u21 = m21 / (area^2.5); % normalize moment central tingkat ke 3 u20 = m20 / (area^2); % normalize moment central tingkat ke 2 u02 = m02 / (area^2); % normalize moment central tingkat ke 2 u30 = m30 / (area^2.5); % normalize moment central tingkat ke 3 u03 = m03 / (area^2.5); % normalize moment central tingkat ke 3 % proses perhitungan 7 moment invariant h1 = u20 + u02; h2 = (u20-u02)^2 + 4*u11^2; h3 = (u30-3*u12)^2 + (u03-3*u21)^2; h4 = (u30 + u12)^2 + (u03 + u21)^2; h5 = (u30-3*u12) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) + (3*u21 - u03) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); h6 = (u20 - u02) * ( (u30 + u12)^2 - (u03 + u21)^2 ) + 4*u11 * (u30 + u12) * (u03 + u21); h7 = (3*u21 - u03) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) - (3*u12 - u30) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); moment1{i}=[ h1 h2 h3 h4 h5 h6 h7 ] cc=moment1{i}(:) global moment format long
18 save long moment1 set(handles.listbox3,'string',cc); % --- Executes on button press in radiobutton1. function radiobutton1_callback(hobject, eventdata, handles) % hobject handle to radiobutton1 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton1 % --- Executes on button press in radiobutton2. function radiobutton2_callback(hobject, eventdata, handles) % hobject handle to radiobutton2 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton2 % --- Executes on button press in radiobutton3. function radiobutton3_callback(hobject, eventdata, handles) % hobject handle to radiobutton3 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton3 % --- Executes on button press in pushbutton7. function pushbutton7_callback(hobject, eventdata, handles) % hobject handle to pushbutton7 (see GCBO) % --- Executes on button press in pushbutton8. function pushbutton8_callback(hobject, eventdata, handles) % hobject handle to pushbutton8 (see GCBO) load preproses2 klm klm1=flipud(klm); t=length(klm) for i=1:t [r,c] = find(klm{i}==1); rbar = mean(r); cbar = mean(c); n = length(r); % nilai X & Y % mean X % mean Y % proses mencari nilai moment central momlist = zeros(n,1); for m = 1 : n; momlist00(m) = (r(m) - rbar)^0 * (c(m) - cbar)^0; momlist10(m) = (r(m) - rbar)^1 * (c(m) - cbar)^0; momlist01(m) = (r(m) - rbar)^0 * (c(m) - cbar)^1; momlist11(m) = (r(m) - rbar)^1 * (c(m) - cbar)^1; momlist12(m) = (r(m) - rbar)^1 * (c(m) - cbar)^2; momlist21(m) = (r(m) - rbar)^2 * (c(m) - cbar)^1; momlist20(m) = (r(m) - rbar)^2 * (c(m) - cbar)^0; momlist02(m) = (r(m) - rbar)^0 * (c(m) - cbar)^2; momlist30(m) = (r(m) - rbar)^3 * (c(m) - cbar)^0;
19 momlist03(m) = (r(m) - rbar)^0 * (c(m) - cbar)^3; % moment central tingkat ke m00 = sum(momlist00); m10 = sum(momlist10); m01 = sum(momlist01); % moment central pusat m00 % moment central pusat m10 % moment central pusat m01 % syarat moment central tingkat kedua & ketiga (p+q>=2)yang di normalisasi m11 = sum(momlist11); % moment central tingkat ke 2 m12 = sum(momlist12); % moment central tingkat ke 3 m21 = sum(momlist21); % moment central tingkat ke 3 m20 = sum(momlist20); % moment central tingkat ke 2 m02 = sum(momlist02); % moment central tingkat ke 2 m30 = sum(momlist30); % moment central tingkat ke 3 m03 = sum(momlist03); % moment central tingkat ke 3 % proses perhitungan normalisasi moment central tingkat ke 2 & 3 % area = bwarea(bw) salah satu cara mencari moment central pusat ke 0 (m00) area = bwarea(klm{i}); u11 = m11 / (area^2); % normalize moment central tingkat ke 2 u12 = m12 / (area^2.5); % normalize moment central tingkat ke 3 u21 = m21 / (area^2.5); % normalize moment central tingkat ke 3 u20 = m20 / (area^2); % normalize moment central tingkat ke 2 u02 = m02 / (area^2); % normalize moment central tingkat ke 2 u30 = m30 / (area^2.5); % normalize moment central tingkat ke 3 u03 = m03 / (area^2.5); % normalize moment central tingkat ke 3 % proses perhitungan 7 moment invariant h1 = u20 + u02; h2 = (u20-u02)^2 + 4*u11^2; h3 = (u30-3*u12)^2 + (u03-3*u21)^2; h4 = (u30 + u12)^2 + (u03 + u21)^2; h5 = (u30-3*u12) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) + (3*u21 - u03) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); h6 = (u20 - u02) * ( (u30 + u12)^2 - (u03 + u21)^2 ) + 4*u11 * (u30 + u12) * (u03 + u21); h7 = (3*u21 - u03) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) - (3*u12 - u30) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); moment1{i}=[ h1 h2 h3 h4 h5 h6 h7 ] cc=moment1{i}(:) global moment format long save long moment1 set(handles.listbox3,'string',cc); % --- Executes on button press in pushbutton9. function pushbutton9_callback(hobject, eventdata, handles) % hobject handle to pushbutton9 (see GCBO) load preproses2 klm klm1=fliplr(klm); t=length(klm) for i=1:t
20 [r,c] = find(klm{i}==1); rbar = mean(r); cbar = mean(c); n = length(r); % nilai X & Y % mean X % mean Y % proses mencari nilai moment central momlist = zeros(n,1); for m = 1 : n; momlist00(m) = (r(m) - rbar)^0 * (c(m) - cbar)^0; momlist10(m) = (r(m) - rbar)^1 * (c(m) - cbar)^0; momlist01(m) = (r(m) - rbar)^0 * (c(m) - cbar)^1; momlist11(m) = (r(m) - rbar)^1 * (c(m) - cbar)^1; momlist12(m) = (r(m) - rbar)^1 * (c(m) - cbar)^2; momlist21(m) = (r(m) - rbar)^2 * (c(m) - cbar)^1; momlist20(m) = (r(m) - rbar)^2 * (c(m) - cbar)^0; momlist02(m) = (r(m) - rbar)^0 * (c(m) - cbar)^2; momlist30(m) = (r(m) - rbar)^3 * (c(m) - cbar)^0; momlist03(m) = (r(m) - rbar)^0 * (c(m) - cbar)^3; % moment central tingkat ke m00 = sum(momlist00); m10 = sum(momlist10); m01 = sum(momlist01); % moment central pusat m00 % moment central pusat m10 % moment central pusat m01 % syarat moment central tingkat kedua & ketiga (p+q>=2)yang di normalisasi m11 = sum(momlist11); % moment central tingkat ke 2 m12 = sum(momlist12); % moment central tingkat ke 3 m21 = sum(momlist21); % moment central tingkat ke 3 m20 = sum(momlist20); % moment central tingkat ke 2 m02 = sum(momlist02); % moment central tingkat ke 2 m30 = sum(momlist30); % moment central tingkat ke 3 m03 = sum(momlist03); % moment central tingkat ke 3 % proses perhitungan normalisasi moment central tingkat ke 2 & 3 % area = bwarea(bw) salah satu cara mencari moment central pusat ke 0 (m00) area = bwarea(klm{i}); u11 = m11 / (area^2); % normalize moment central tingkat ke 2 u12 = m12 / (area^2.5); % normalize moment central tingkat ke 3 u21 = m21 / (area^2.5); % normalize moment central tingkat ke 3 u20 = m20 / (area^2); % normalize moment central tingkat ke 2 u02 = m02 / (area^2); % normalize moment central tingkat ke 2 u30 = m30 / (area^2.5); % normalize moment central tingkat ke 3 u03 = m03 / (area^2.5); % normalize moment central tingkat ke 3 % proses perhitungan 7 moment invariant h1 = u20 + u02; h2 = (u20-u02)^2 + 4*u11^2; h3 = (u30-3*u12)^2 + (u03-3*u21)^2; h4 = (u30 + u12)^2 + (u03 + u21)^2; h5 = (u30-3*u12) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) + (3*u21 - u03) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); h6 = (u20 - u02) * ( (u30 + u12)^2 - (u03 + u21)^2 ) + 4*u11 * (u30 + u12) * (u03 + u21); h7 = (3*u21 - u03) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) - (3*u12 - u30) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); moment1{i}=[ h1 h2 h3 h4 h5 h6 h7 ] cc=moment1{i}(:)
21 global moment format long save long moment1 set(handles.listbox3,'string',cc); Program Pengujian GUI function varargout = GUITEST(varargin) % GUITEST M-file for GUITEST.fig % GUITEST, by itself, creates a new GUITEST or raises the existing % singleton*. % % H = GUITEST returns the handle to a new GUITEST or the handle to % the existing singleton*. % % GUITEST('CALLBACK',hObject,eventData,handles,...) calls the local % function named CALLBACK in GUITEST.M with the given input arguments. % % GUITEST('Property','Value',...) creates a new GUITEST or raises the % existing singleton*. Starting from the left, property value pairs are % applied to the GUI before GUITEST_OpeningFcn gets called. An % unrecognized property name or invalid value makes property application % stop. All inputs are passed to GUITEST_OpeningFcn via varargin. % % *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only one % instance to run (singleton)". % % See also: GUIDE, GUIDATA, GUIHANDLES % Edit the above text to modify the response to help GUITEST % Last Modified by GUIDE v Feb :48:42 % Begin initialization code - DO NOT EDIT gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_layoutfcn', [],... 'gui_callback', []); if nargin && ischar(varargin{1}) gui_state.gui_callback = str2func(varargin{1}); if nargout [varargout{1:nargout}] = gui_mainfcn(gui_state, varargin{:}); else gui_mainfcn(gui_state, varargin{:}); % End initialization code - DO NOT EDIT % --- Executes just before GUITEST is made visible. function GUITEST_OpeningFcn(hObject, eventdata, handles, varargin) % This function has no output args, see OutputFcn. % hobject handle to figure % varargin command line arguments to GUITEST (see VARARGIN) % Choose default command line output for GUITEST handles.output = hobject; % Update handles structure
22 guidata(hobject, handles); % UIWAIT makes GUITEST wait for user response (see UIRESUME) % uiwait(handles.figure1); % --- Outputs from this function are returned to the command line. function varargout = GUITEST_OutputFcn(hObject, eventdata, handles) % varargout cell array for returning output args (see VARARGOUT); % hobject handle to figure % Get default command line output from handles structure varargout{1} = handles.output; % --- Executes on button press in panggil. function panggil_callback(hobject, eventdata, handles) % hobject handle to panggil (see GCBO) file=uigetfile('*bmp'); if~isequal(file,0) myform=guidata(gcbo); gambar=imread(file); imshow(gambar); axes=(myform.axes1); open(file); % --- Executes on button press in pushbutton2. function pushbutton2_callback(hobject, eventdata, handles) % hobject handle to pushbutton2 (see GCBO) myform=guidata(gcbo); gambar=(myform.panggil); gambar=im2bw(gambar); im=imresize(gambar,[ ]); [r,c] = find(im==1); rbar = mean(r); cbar = mean(c); n = length(r); % nilai X & Y % mean X % mean Y % proses mencari nilai moment central momlist = zeros(n,1); for m = 1 : n; momlist00(m) = (r(m) - rbar)^0 * (c(m) - cbar)^0; momlist10(m) = (r(m) - rbar)^1 * (c(m) - cbar)^0; momlist01(m) = (r(m) - rbar)^0 * (c(m) - cbar)^1; momlist11(m) = (r(m) - rbar)^1 * (c(m) - cbar)^1; momlist12(m) = (r(m) - rbar)^1 * (c(m) - cbar)^2; momlist21(m) = (r(m) - rbar)^2 * (c(m) - cbar)^1; momlist20(m) = (r(m) - rbar)^2 * (c(m) - cbar)^0; momlist02(m) = (r(m) - rbar)^0 * (c(m) - cbar)^2; momlist30(m) = (r(m) - rbar)^3 * (c(m) - cbar)^0; momlist03(m) = (r(m) - rbar)^0 * (c(m) - cbar)^3; % moment central tingkat ke
23 m00 = sum(momlist00); m10 = sum(momlist10); m01 = sum(momlist01); % moment central pusat m00 % moment central pusat m10 % moment central pusat m01 % syarat moment central tingkat kedua & ketiga (p+q>=2)yang di normalisasi m11 = sum(momlist11); % moment central tingkat ke 2 m12 = sum(momlist12); % moment central tingkat ke 3 m21 = sum(momlist21); % moment central tingkat ke 3 m20 = sum(momlist20); % moment central tingkat ke 2 m02 = sum(momlist02); % moment central tingkat ke 2 m30 = sum(momlist30); % moment central tingkat ke 3 m03 = sum(momlist03); % moment central tingkat ke 3 % proses perhitungan normalisasi moment central tingkat ke 2 & 3 % area = bwarea(bw) salah satu cara mencari moment central pusat ke 0 (m00) area = bwarea(im); u11 = m11 / (area^2); % normalize moment central tingkat ke 2 u12 = m12 / (area^2.5); % normalize moment central tingkat ke 3 u21 = m21 / (area^2.5); % normalize moment central tingkat ke 3 u20 = m20 / (area^2); % normalize moment central tingkat ke 2 u02 = m02 / (area^2); % normalize moment central tingkat ke 2 u30 = m30 / (area^2.5); % normalize moment central tingkat ke 3 u03 = m03 / (area^2.5); % normalize moment central tingkat ke 3 % proses perhitungan 7 moment invariant h1 = u20 + u02; h2 = (u20-u02)^2 + 4*u11^2; h3 = (u30-3*u12)^2 + (u03-3*u21)^2; h4 = (u30 + u12)^2 + (u03 + u21)^2; h5 = (u30-3*u12) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) + (3*u21 - u03) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); h6 = (u20 - u02) * ( (u30 + u12)^2 - (u03 + u21)^2 ) + 4*u11 * (u30 + u12) * (u03 + u21); h7 = (3*u21 - u03) * (u30 + u12) * ( (u30 + u12)^2-3*(u03 + u21)^2 ) - (3*u12 - u30) * (u03 + u21) * ( 3*(u30 + u12)^2 - (u03 + u21)^2 ); momentgui=[ h1 h2 h3 h4 h5 h6 h7 rbar cbar area] % global moment format long save gui1 momentgui function edit1_callback(hobject, eventdata, handles) % hobject handle to edit1 (see GCBO) % Hints: get(hobject,'string') returns contents of edit1 as text % str2double(get(hobject,'string')) returns contents of edit1 as a double % --- Executes during object creation, after setting all properties. function edit1_createfcn(hobject, eventdata, handles) % hobject handle to edit1 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor'))
24 set(hobject,'backgroundcolor','white'); function edit2_callback(hobject, eventdata, handles) % hobject handle to edit2 (see GCBO) % Hints: get(hobject,'string') returns contents of edit2 as text % str2double(get(hobject,'string')) returns contents of edit2 as a double % --- Executes during object creation, after setting all properties. function edit2_createfcn(hobject, eventdata, handles) % hobject handle to edit2 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: edit controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on button press in pushbutton4. function pushbutton4_callback(hobject, eventdata, handles) selection=questdlg(['keluar...file...',get(handles.figure1,'name') '?'],['Keluar...',get(handles.figure1,'Name') '...'],'Ya','Tidak','Ya'); if strcmp(selection,'tidak') return; delete(handles.figure1) % hobject handle to pushbutton4 (see GCBO) % --- Executes on button press in pushbutton6. function pushbutton6_callback(hobject, eventdata, handles) % hobject handle to pushbutton6 (see GCBO) clc clear all myform=guidata(gcbo); load gui1 momentgui load asli1 v load asli2 w load asli3 v0 load asli4 w0 n = 10; %INPUT p = 2; m = 4; % OUTPUT alpha = ; e = 0.05; % error limit % %%% Inisialisasi Input & Target x = [momentgui]; t=[ 1]; tr = size(x,1); %
25 %%% hidden Layer pertama zin = zeros(tr,p); z = zeros(tr,p); din = zeros(tr,p); dj = zeros(tr,p); chv = zeros(n,p); chv0 = zeros(1,p); %%%Output Layer yin = zeros(tr,m); y = zeros(tr,m); d = zeros(tr,m); chw = zeros(p,m); chw0 = zeros(1,m); error=zeros(tr,m); iteration =1; er = 0; error = 0; %% ==Step_1==================================================== %%% ==Step_2==================================================== for Tp=1:tr; %% Feed forward: %%% ==Step_3==================================================== %%% ==Step_4==================================================== %%% First Layer for j=1:p zin(tp,j) = 0; for i=1:n zin(tp,j) = zin(tp,j) + x(tp,i) * v(i,j); zin(tp,j) = v0(j) + zin(tp,j); z(tp,j) = (2/(1+exp(-zin(Tp,j))))-1; %aktivasi function Z %%% ==Step_5================================================== %%% Output Layer for k=1:m yin(tp,k) = 0; for j=1:p yin(tp,k) = yin(tp,k) + z(tp,j) * w(j,k); yin(tp,k) = w0(k) + yin(tp,k); y(tp,k) = 1/(1+exp(-yin(Tp,k))); %aktivasi function Y %% ==Step_9==Test_stop_kondisi========================== for k=1:m error(tp,k) =sqrt((t(tp,k)-y(tp,k)).^2); % % for k=1:m % if y(k) < 0.5 % y(k)=0; % else % y(k)=1 % % errors=sum(error)/4 global y format short set(myform.listbox1,'string',error); set(myform.listbox2,'string',y); for k=1:m if y(k) < 0.5
26 y(k)=0; else y(k)=1 set(myform.listbox3,'string',y); % --- Executes on key press with focus on uitable1 and none of its controls. function uitable1_keypressfcn(hobject, eventdata, handles) % hobject handle to uitable1 (see GCBO) % eventdata structure with the following fields (see UITABLE) % Key: name of the key that was pressed, in lower case % Character: character interpretation of the key(s) that was pressed % Modifier: name(s) of the modifier key(s) (i.e., control, shift) pressed % --- Executes on selection change in listbox1. function listbox1_callback(hobject, eventdata, handles) % hobject handle to listbox1 (see GCBO) % Hints: contents = get(hobject,'string') returns listbox1 contents as cell array % contents{get(hobject,'value')} returns selected item from listbox1 % --- Executes during object creation, after setting all properties. function listbox1_createfcn(hobject, eventdata, handles) % hobject handle to listbox1 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: listbox controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on selection change in listbox2. function listbox2_callback(hobject, eventdata, handles) % hobject handle to listbox2 (see GCBO) % Hints: contents = get(hobject,'string') returns listbox2 contents as cell array % contents{get(hobject,'value')} returns selected item from listbox2 % --- Executes during object creation, after setting all properties. function listbox2_createfcn(hobject, eventdata, handles) % hobject handle to listbox2 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: listbox controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white'); % --- Executes on button press in radiobutton1. function radiobutton1_callback(hobject, eventdata, handles)
27 % hobject handle to radiobutton1 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton1 % --- Executes on button press in radiobutton2. function radiobutton2_callback(hobject, eventdata, handles) % hobject handle to radiobutton2 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton2 % --- Executes on button press in radiobutton3. function radiobutton3_callback(hobject, eventdata, handles) % hobject handle to radiobutton3 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton3 % --- Executes on button press in radiobutton4. function radiobutton4_callback(hobject, eventdata, handles) % hobject handle to radiobutton4 (see GCBO) % Hint: get(hobject,'value') returns toggle state of radiobutton4 % --- Executes on selection change in listbox3. function listbox3_callback(hobject, eventdata, handles) % hobject handle to listbox3 (see GCBO) % Hints: contents = get(hobject,'string') returns listbox3 contents as cell array % contents{get(hobject,'value')} returns selected item from listbox3 % --- Executes during object creation, after setting all properties. function listbox3_createfcn(hobject, eventdata, handles) % hobject handle to listbox3 (see GCBO) % handles empty - handles not created until after all CreateFcns called % Hint: listbox controls usually have a white background on Windows. % See ISPC and COMPUTER. if ispc && isequal(get(hobject,'backgroundcolor'), get(0,'defaultuicontrolbackgroundcolor')) set(hobject,'backgroundcolor','white');
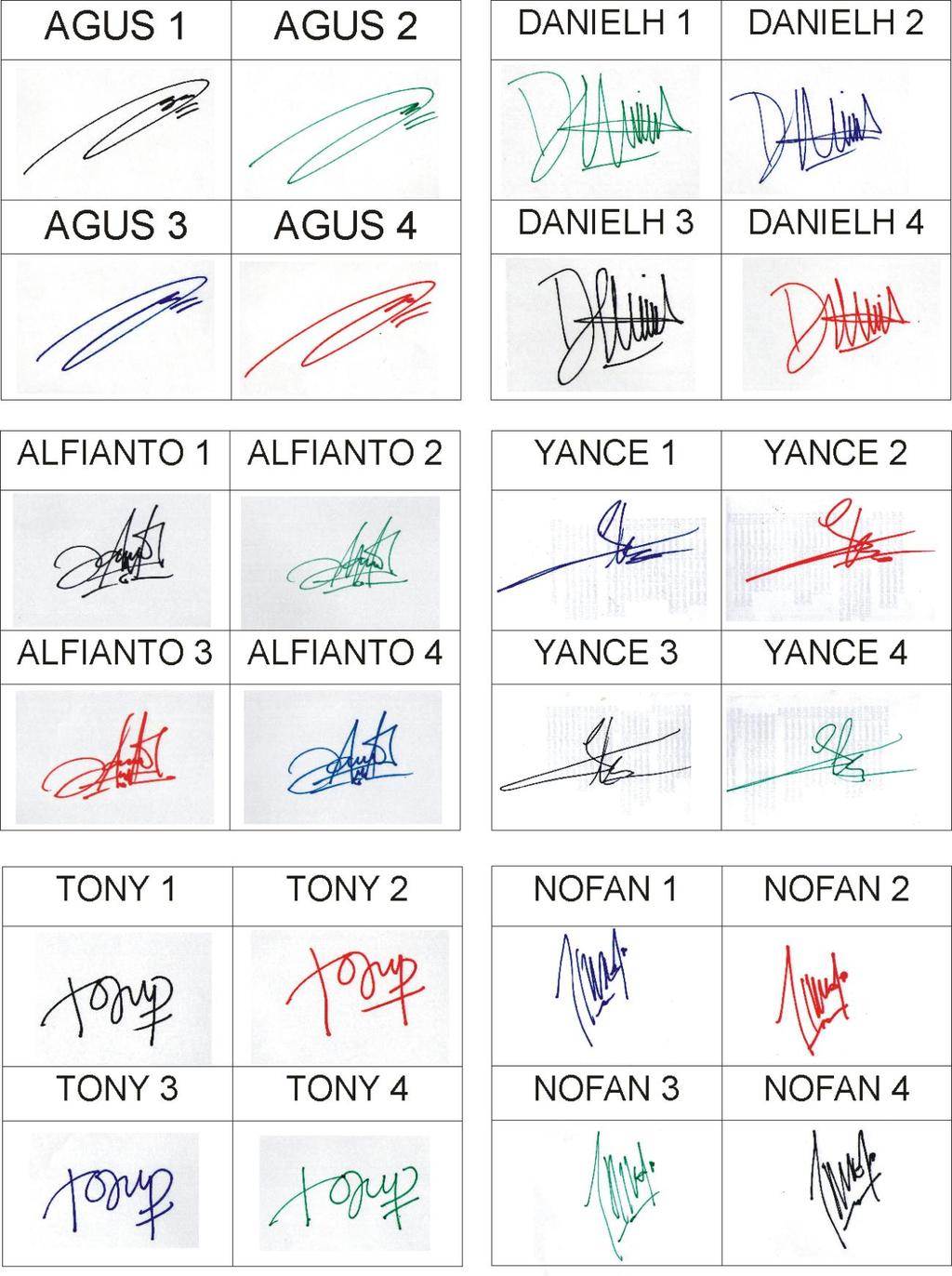
28 LAMPIRAN B DATA CITRA TANDA TANGAN
29

30
31 LAMPIRAN C DATA UJI HIPOTESIS
32 1. Uji Hipotesis (Tabel 4.2) Target Output Selisih t t o t o
33 Target Output Selisih t o D (rata rata) 1E-05 SD (Standar Deviasi) t (Satistik Uji) t Ta (Alpha)
34 2. Uji Hipotesis (Tabel 4.4) Target Output Selisih t t o t o
35 Target Output Selisih t o D (rata rata) SD (Standar Deviasi) t (Satistik Uji) t Ta (Alpha)
36 3. Uji Hipotesis (Tabel 4.5, 4.6) Target Output Selisih t1 t2 0 0 o2 0 t o
37 Target Output Selisih t o D (rata rata) SD (Standar Deviasi) t (Satistik Uji) t Ta (Alpha)
38 4. Uji Hipotesis (Tabel 4.8) Target Output Selisih t t o t o
39 Target Output Selisih t o D (rata rata) SD (Standar Deviasi) t (Satistik Uji) t Ta (Alpha)
40 5. Uji Hipotesis (Tabel 4.9, 2.10) Target Output Selisih t1 t2 0 0 o2 0 t o
41 Target Output Selisih t o D (rata rata) SD (Standar Deviasi) t (Satistik Uji) t Ta (Alpha)
42 6. Uji Hipotesis (Tabel 4.12) Target Output Selisih t t o t o
43 Target Output Selisih t o D (rata rata) SD (Standar Deviasi) t (Satistik Uji) t Ta (Alpha)
Signal and Systems. Matlab GUI based analysis. XpertSolver.com
 Signal and Systems Matlab GUI based analysis Description: This Signal and Systems based Project takes a sound file in.wav format and performed a detailed analysis, as well as filtering of the signal. The
Signal and Systems Matlab GUI based analysis Description: This Signal and Systems based Project takes a sound file in.wav format and performed a detailed analysis, as well as filtering of the signal. The
LAMPIRAN 1. Percobaan
 LAMPIRAN 1 1. Larutan 15 ppm Polystyrene ENERGI Percobaan 1 2 3 PROBABILITY 0.07 0.116 0.113 0.152 0.127 0.15 0.256 0.143 0.212 0.203 0.22 0.24 0.234 0.23 0.234 0.3 0.239 0.35 0.201 0.263 0.37 0.389 0.382
LAMPIRAN 1 1. Larutan 15 ppm Polystyrene ENERGI Percobaan 1 2 3 PROBABILITY 0.07 0.116 0.113 0.152 0.127 0.15 0.256 0.143 0.212 0.203 0.22 0.24 0.234 0.23 0.234 0.3 0.239 0.35 0.201 0.263 0.37 0.389 0.382
% Edit the above text to modify the response to help Video_Player. % Last Modified by GUIDE v May :38:12
 FILE NAME: Video_Player DESCRIPTION: Video Player Name Date Reason Sahariyaz 28-May-2015 Basic GUI concepts function varargout = Video_Player(varargin) VIDEO_PLAYER MATLAB code for Video_Player.fig VIDEO_PLAYER,
FILE NAME: Video_Player DESCRIPTION: Video Player Name Date Reason Sahariyaz 28-May-2015 Basic GUI concepts function varargout = Video_Player(varargin) VIDEO_PLAYER MATLAB code for Video_Player.fig VIDEO_PLAYER,
LISTING PROGRAM. % Edit the above text to modify the response to help cover. % Last Modified by GUIDE v Jun :24:43
 A1 LISTING PROGRAM 1. Form Cover function varargout = cover(varargin) COVER MATLAB code for cover.fig COVER, by itself, creates a new COVER or raises the existing singleton*. H = COVER returns the handle
A1 LISTING PROGRAM 1. Form Cover function varargout = cover(varargin) COVER MATLAB code for cover.fig COVER, by itself, creates a new COVER or raises the existing singleton*. H = COVER returns the handle
LISTING PROGRAM. % UIWAIT makes pertama wait for user response (see UIRESUME) % uiwait(handles.figure1);
 % uiwait(handles.figure1);") LISTING PROGRAM FORM PERTAMA : function varargout = pertama(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @pertama_openingfcn,...
LISTING PROGRAM FORM PERTAMA : function varargout = pertama(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @pertama_openingfcn,...
1. Peralatan LAMPIRAN
 1. Peralatan LAMPIRAN 2. Data Sampel a. Air murni 3ml Energy(mj) Probability Air Murni 0.07 0.001 0.15 0.003 0.22 0.006 0.3 0.028 0.37 0.045 0.39 0.049 0.82 0.053 0.89 0.065 1.28 0.065 1.42 0.106 1.7
1. Peralatan LAMPIRAN 2. Data Sampel a. Air murni 3ml Energy(mj) Probability Air Murni 0.07 0.001 0.15 0.003 0.22 0.006 0.3 0.028 0.37 0.045 0.39 0.049 0.82 0.053 0.89 0.065 1.28 0.065 1.42 0.106 1.7
% Edit the above text to modify the response to help Principal
 function varargout = Principal(varargin) % OPFGUI MATLAB code for Principal.fig % OPFGUI, by itself, creates a new OPFGUI or raises the existing % singleton*. % % H = OPFGUI returns the handle to a new
function varargout = Principal(varargin) % OPFGUI MATLAB code for Principal.fig % OPFGUI, by itself, creates a new OPFGUI or raises the existing % singleton*. % % H = OPFGUI returns the handle to a new
GUI code for different sections is in following sections
 Software Listing The Graphical User Interface (GUI) and Fuzzy Inference System (FIS) are developed in MATLAB. Software code is developed for different sections like Weaving section, Motor Status, Environment,
Software Listing The Graphical User Interface (GUI) and Fuzzy Inference System (FIS) are developed in MATLAB. Software code is developed for different sections like Weaving section, Motor Status, Environment,
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,500 108,000 1.7 M Open access books available International authors and editors Downloads Our
Lampiran 1. Script M-File Global Ridge
 LAMPIRAN 67 Lampiran 1. Script M-File Global Ridge function [l, e, L, E] = globalridge(h, Y, l) [l, e, L, E] = globalridge(h, Y, l, options, U) Calculates the best global ridge regression parameter (l)
LAMPIRAN 67 Lampiran 1. Script M-File Global Ridge function [l, e, L, E] = globalridge(h, Y, l) [l, e, L, E] = globalridge(h, Y, l, options, U) Calculates the best global ridge regression parameter (l)
Homeworks on FFT Instr. and Meas. for Communication Systems- Gianfranco Miele. Name Surname
 Homeworks on FFT 90822- Instr. and Meas. for Communication Systems- Gianfranco Miele Name Surname October 15, 2014 1 Name Surname 90822 (Gianfranco Miele): Homeworks on FFT Contents Exercise 1 (Solution)............................................
Homeworks on FFT 90822- Instr. and Meas. for Communication Systems- Gianfranco Miele Name Surname October 15, 2014 1 Name Surname 90822 (Gianfranco Miele): Homeworks on FFT Contents Exercise 1 (Solution)............................................
Supplementary Information
 Supplementary Information Retooling Laser Speckle Contrast Analysis Algorithm to Enhance Non-Invasive High Resolution Laser Speckle Functional Imaging of Cutaneous Microcirculation Surya C Gnyawali 1,
Supplementary Information Retooling Laser Speckle Contrast Analysis Algorithm to Enhance Non-Invasive High Resolution Laser Speckle Functional Imaging of Cutaneous Microcirculation Surya C Gnyawali 1,
Finding a Minimum Covering Circle Based on Infinity Norms
 Finding a Minimum Covering Circle Based on Infinity Norms by Andrew A. Thompson ARL-TR-4495 July 2008 Approved for public release; distribution is unlimited. NOTICES Disclaimers The findings in this report
Finding a Minimum Covering Circle Based on Infinity Norms by Andrew A. Thompson ARL-TR-4495 July 2008 Approved for public release; distribution is unlimited. NOTICES Disclaimers The findings in this report
Akkad Bakad Bambai Bo
 Akkad Bakad Bambai Bo The Josephus Problem Shivam Sharma, Rajat Saini and Natasha Sharma Cluster Innovation Center, University of Delhi Abstract We aim to give explanation of the recursive formula for
Akkad Bakad Bambai Bo The Josephus Problem Shivam Sharma, Rajat Saini and Natasha Sharma Cluster Innovation Center, University of Delhi Abstract We aim to give explanation of the recursive formula for
Ear Recognition. By: Zeyangyi Wang
 Ear Recognition By: Zeyangyi Wang Ear Recognition By: Zeyangyi Wang Online: < http://cnx.org/content/col11604/1.3/ > C O N N E X I O N S Rice University, Houston, Texas This selection and arrangement
Ear Recognition By: Zeyangyi Wang Ear Recognition By: Zeyangyi Wang Online: < http://cnx.org/content/col11604/1.3/ > C O N N E X I O N S Rice University, Houston, Texas This selection and arrangement
ECE Fall 05. Undergraduate Research: Digital Signal Processing & Quantization Effects
 ECE 491-153 Fall 05 Undergraduate Research: Digital Signal Processing & Quantization Effects Done By: Tanim Taher SID# 10370800 Date: December 19, 2005 DSP & Quantization 1 Tanim Taher ACKNOWLEDGEMENTS
ECE 491-153 Fall 05 Undergraduate Research: Digital Signal Processing & Quantization Effects Done By: Tanim Taher SID# 10370800 Date: December 19, 2005 DSP & Quantization 1 Tanim Taher ACKNOWLEDGEMENTS
MV 1:00 1:05 1:00 1:05
 1 54 MV 1:00 1:05 1:00 1:05 55 DTW 56 function varargout = my_filter8(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @my_filter8_openingfcn,...
1 54 MV 1:00 1:05 1:00 1:05 55 DTW 56 function varargout = my_filter8(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @my_filter8_openingfcn,...
A NEW MACHINING COST CALCULATOR (MC 2 )
") A NEW MACHINING COST CALCULATOR (MC 2 ) By MATHEW RUSSELL JOHNSON A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER
A NEW MACHINING COST CALCULATOR (MC 2 ) By MATHEW RUSSELL JOHNSON A THESIS PRESENTED TO THE GRADUATE SCHOOL OF THE UNIVERSITY OF FLORIDA IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF MASTER
OMR Sheet Recognition
 International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 8, Number 1 (2018), pp. 11-32 International Research Publications House http://www. irphouse.com OMR Sheet Recognition
International Journal of Information & Computation Technology. ISSN 0974-2239 Volume 8, Number 1 (2018), pp. 11-32 International Research Publications House http://www. irphouse.com OMR Sheet Recognition
Lithium-Ion Battery Data. Management
 Lithium-Ion Battery Data Management Frank Ferrato Dr. Jung-Hyun Kim April 2018 Abstract: Lithium Ion Battery research is growing due to the need for renewable resources. Since the amount of research is
Lithium-Ion Battery Data Management Frank Ferrato Dr. Jung-Hyun Kim April 2018 Abstract: Lithium Ion Battery research is growing due to the need for renewable resources. Since the amount of research is
LAMPIRAN LISTING PROGRAM
 A1 LAMPIRAN LISTING PROGRAM Prototype.m function varargout = prototype(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @prototype_openingfcn,...
A1 LAMPIRAN LISTING PROGRAM Prototype.m function varargout = prototype(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @prototype_openingfcn,...
LISTING PROGRAM. if nargout [varargout{1:nargout}] = gui_mainfcn(gui_state, varargin{:}); else gui_mainfcn(gui_state, varargin{:}); end
![LISTING PROGRAM. if nargout [varargout{1:nargout}] = gui_mainfcn(gui_state, varargin{:}); else gui_mainfcn(gui_state, varargin{:}); end](/thumbs/81/82678263.jpg "LISTING PROGRAM. if nargout [varargout{1:nargout}] = gui_mainfcn(gui_state, varargin{:}); else gui_mainfcn(gui_state, varargin{:}); end") A-1 LISTING PROGRAM 1. Form Cover function varargout = cover(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @cover_openingfcn,...
A-1 LISTING PROGRAM 1. Form Cover function varargout = cover(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn', @cover_openingfcn,...
% --- Executes on button press in btn_gsn. function btn_gsn_callback(hobject, eventdata, handles) GaussianSpeckleNoise close AiSoftware;
 GaussianSpeckleNoise close AiSoftware;") A-2 'gui_openingfcn', @AiSoftware_OpeningFcn,... 'gui_outputfcn', @AiSoftware_OutputFcn,... 'gui_layoutfcn', [],... 'gui_callback', []); if nargin && ischar(varargin{1}) gui_state.gui_callback = str2func(varargin{1});
A-2 'gui_openingfcn', @AiSoftware_OpeningFcn,... 'gui_outputfcn', @AiSoftware_OutputFcn,... 'gui_layoutfcn', [],... 'gui_callback', []); if nargin && ischar(varargin{1}) gui_state.gui_callback = str2func(varargin{1});
1.Matlab Image Encryption Code
 1.Matlab Image Encryption Code (URL: http://www.cheers4all.com/2012/04/matlab-image-encryption-code/) This project is Image Encryption & Decryption. The user will give an input and encryption factor. The
1.Matlab Image Encryption Code (URL: http://www.cheers4all.com/2012/04/matlab-image-encryption-code/) This project is Image Encryption & Decryption. The user will give an input and encryption factor. The
LAMPIRAN A LISTINGPROGRAM
 LAMPIRAN A LISTINGPROGRAM 1. Form Utama (myprogram.fig) function varargout = myprogram(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn',
LAMPIRAN A LISTINGPROGRAM 1. Form Utama (myprogram.fig) function varargout = myprogram(varargin) gui_singleton = 1; gui_state = struct('gui_name', mfilename,... 'gui_singleton', gui_singleton,... 'gui_openingfcn',
PROGRAMMING IN MATLAB
 PROGRAMMING IN MATLAB Rohan D sa Rafael Love Todd Page OBJECTIVE: This document gives an overview of a few aspects related to programming in Matlab. With the help of a sample program, it goes through some
PROGRAMMING IN MATLAB Rohan D sa Rafael Love Todd Page OBJECTIVE: This document gives an overview of a few aspects related to programming in Matlab. With the help of a sample program, it goes through some
Airfoil Boundary Layer Separation Prediction
 Airfoil Boundary Layer Separation Prediction A project present to The Faculty of the Department of Aerospace Engineering San Jose State University in partial fulfillment of the requirements for the degree
Airfoil Boundary Layer Separation Prediction A project present to The Faculty of the Department of Aerospace Engineering San Jose State University in partial fulfillment of the requirements for the degree
GUI Signal Analysis and Filtering Design
 i GUI Signal Analysis and Filtering Design Axel Daniela Campero Vega, Electrical Engineering Project Advisor: Dr. Dick Blandford April 26, 2018 Evansville, Indiana ii Acknowledgements I want to thank Dr.
i GUI Signal Analysis and Filtering Design Axel Daniela Campero Vega, Electrical Engineering Project Advisor: Dr. Dick Blandford April 26, 2018 Evansville, Indiana ii Acknowledgements I want to thank Dr.
Contents INTERFACING MATLAB WITH EMBEDDED SYSTEMS
 Contents MATLAB INTRODUCTION:... 1 Why it is useful for prototyping AI projects??... 2 Using MATLAB as a calculator:... 3 How to use conditions... 8 Serial/Parallel communication:... 9 Color Detection
Contents MATLAB INTRODUCTION:... 1 Why it is useful for prototyping AI projects??... 2 Using MATLAB as a calculator:... 3 How to use conditions... 8 Serial/Parallel communication:... 9 Color Detection
Parallel-connected solar arrays
 Scholars' Mine Masters Theses Student Research & Creative Works Spring 2013 Parallel-connected solar arrays Majed Meshal Alabbass Follow this and additional works at: http://scholarsmine.mst.edu/masters_theses
Scholars' Mine Masters Theses Student Research & Creative Works Spring 2013 Parallel-connected solar arrays Majed Meshal Alabbass Follow this and additional works at: http://scholarsmine.mst.edu/masters_theses
Solving Sudoku with MATLAB
 Solving Sudoku with MATLAB Raluca Marinescu Andrea Garcia Ivan Castro Eduard Paul Enoiu Mälardalen University, Västerås, Sweden {rmu09001, aga09001, ico09002, eeu09001}@student.mdh.se March 25, 2011 Abstract
Solving Sudoku with MATLAB Raluca Marinescu Andrea Garcia Ivan Castro Eduard Paul Enoiu Mälardalen University, Västerås, Sweden {rmu09001, aga09001, ico09002, eeu09001}@student.mdh.se March 25, 2011 Abstract
Main Form visual Studio
 Main Form visual Studio using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Windows.Forms;
Main Form visual Studio using System; using System.Collections.Generic; using System.ComponentModel; using System.Data; using System.Drawing; using System.Linq; using System.Text; using System.Windows.Forms;
.., 7. References. [ 1] 1 mage Analysis and Mathematical Morphology:J.Serra. [2] Erosion, dilation and related operators,by Mariusz Jankowski
![.., 7. References. [ 1] 1 mage Analysis and Mathematical Morphology:J.Serra. [2] Erosion, dilation and related operators,by Mariusz Jankowski](/thumbs/81/84607140.jpg ".., 7. References. [ 1] 1 mage Analysis and Mathematical Morphology:J.Serra. [2] Erosion, dilation and related operators,by Mariusz Jankowski") 7. References [ 1] 1 mage Analysis and Mathematical Morphology:J.Serra [2] Erosion, dilation and related operators,by Mariusz Jankowski [3] Morphological Image Processing by Ranga Rodrigo [4] Application
7. References [ 1] 1 mage Analysis and Mathematical Morphology:J.Serra [2] Erosion, dilation and related operators,by Mariusz Jankowski [3] Morphological Image Processing by Ranga Rodrigo [4] Application
COMPLETELY AUTOMATED PUBLIC TURING TEST TO TELL COMPUTERS AND HUMANS APART
 COMPLETELY AUTOMATED PUBLIC TURING TEST TO TELL COMPUTERS AND HUMANS APART 1 Varjith Anchuri, 2 K.Hanuman Krishna, 3 M.Gopi Chand, 4 S.Rishi, UG Scholar Dept Of CSE, SRM University,Chennai. Abstract A
COMPLETELY AUTOMATED PUBLIC TURING TEST TO TELL COMPUTERS AND HUMANS APART 1 Varjith Anchuri, 2 K.Hanuman Krishna, 3 M.Gopi Chand, 4 S.Rishi, UG Scholar Dept Of CSE, SRM University,Chennai. Abstract A
Implementation of a Motion Detection System
 Implementation of a Motion Detection System Asif Ansari 1, T.C.Manjunath (Ph.D., IIT Bombay) 2, C.Ardil 3 Abstract In today s competitive environment, the security concerns have grown tremously. In the
Implementation of a Motion Detection System Asif Ansari 1, T.C.Manjunath (Ph.D., IIT Bombay) 2, C.Ardil 3 Abstract In today s competitive environment, the security concerns have grown tremously. In the
Real-Time IIR Digital Filters
 Real-Time IIR Digital Filters Chapter 8 Introduction Infinite impulse response (IIR) filter design has its roots in traditional analog filter design. One of the main issues in IIR digital filter design
Real-Time IIR Digital Filters Chapter 8 Introduction Infinite impulse response (IIR) filter design has its roots in traditional analog filter design. One of the main issues in IIR digital filter design
ALGORITHMS AND INTERFACE FOR OCEAN ACOUSTIC RAY-TRACING (Developed in MATLAB)
") ALGORITHMS AND INTERFACE FOR OCEAN ACOUSTIC RAY-TRACING (Developed in MATLAB) Technical Report No. NIO/TR 09/005 T.V.Ramana Murty M.M.Malleswara Rao S.Surya Prakash P.Chandramouli K.S.R.Murthy Regional
ALGORITHMS AND INTERFACE FOR OCEAN ACOUSTIC RAY-TRACING (Developed in MATLAB) Technical Report No. NIO/TR 09/005 T.V.Ramana Murty M.M.Malleswara Rao S.Surya Prakash P.Chandramouli K.S.R.Murthy Regional
Accepted by... John H. Lienhard V
 The Understanding, Characterization, and Implementation of a SICK LMS-291 Laser Scanner for Use in an Experimental Environment by Marcos Berrios Submitted to the Department of Mechanical Engineering in
The Understanding, Characterization, and Implementation of a SICK LMS-291 Laser Scanner for Use in an Experimental Environment by Marcos Berrios Submitted to the Department of Mechanical Engineering in
TREBALL FINAL DE GRAU
 Estudi del procés constructiu de ponts atirantats construïts sobre suports provisionals. ANNEXOS Treball realitzat per: Joan Fraile Diana Dirigit per: José Turmo Coderque Jose Antonio Lozano Galant Grau
Estudi del procés constructiu de ponts atirantats construïts sobre suports provisionals. ANNEXOS Treball realitzat per: Joan Fraile Diana Dirigit per: José Turmo Coderque Jose Antonio Lozano Galant Grau
MEASURING INTERFACIAL TENSION WITH THE PENDANT DROP METHOD
 MEASURING INTERFACIAL TENSION WITH THE PENDANT DROP METHOD A Thesis Presented to The Academic Faculty by Kevin K. Mohan-Nair In Partial Fulfillment of the Requirements for the Degree Bachelor of Science
MEASURING INTERFACIAL TENSION WITH THE PENDANT DROP METHOD A Thesis Presented to The Academic Faculty by Kevin K. Mohan-Nair In Partial Fulfillment of the Requirements for the Degree Bachelor of Science
MATLAB. Creating Graphical User Interfaces Version 7. The Language of Technical Computing
 MATLAB The Language of Technical Computing Note This revision of Creating Graphical User Interfaces, issued May 2006, adds three new chapters that provide more information for creating GUIs programmatically.
MATLAB The Language of Technical Computing Note This revision of Creating Graphical User Interfaces, issued May 2006, adds three new chapters that provide more information for creating GUIs programmatically.
1 Lab 3, Simulation of crank-piston system
 1 Lab 3, Simulation of crank-piston system 1.1 Problem description Simulation 3 Slider-Crank Mechanism with a Piston In your text, the slider-crank kinematic mechanism is discussed and equations of motion
1 Lab 3, Simulation of crank-piston system 1.1 Problem description Simulation 3 Slider-Crank Mechanism with a Piston In your text, the slider-crank kinematic mechanism is discussed and equations of motion
IMAGE STEGANOGRAPHY USING DISCRETE COSINE TRNASFORM ALGORITHM
 RCC Institute of Information Technology Canal South Road, Beliaghata, Kolkata 700 015 [Affiliated to West Bengal University of Technology] IMAGE STEGANOGRAPHY USING DISCRETE COSINE TRNASFORM ALGORITHM
RCC Institute of Information Technology Canal South Road, Beliaghata, Kolkata 700 015 [Affiliated to West Bengal University of Technology] IMAGE STEGANOGRAPHY USING DISCRETE COSINE TRNASFORM ALGORITHM
LOK-Viewer : Graphical Interface Application for Geomagnetic Data in Observatory Geomagnetic Lombok
 LOK-Viewer : Graphical Interface Application for Geomagnetic Data in Observatory Geomagnetic Lombok Giri W. Wiriasto, Teti Zubaidah, Bulkis Kanata Electrical Engineering Dept. Mataram University Lombok,
LOK-Viewer : Graphical Interface Application for Geomagnetic Data in Observatory Geomagnetic Lombok Giri W. Wiriasto, Teti Zubaidah, Bulkis Kanata Electrical Engineering Dept. Mataram University Lombok,
Keywords: Learning automata, Vertex multicoloring.
 ISSN XXXX XXXX 2018 IJESC Research Article Volume 8 Issue No.4 Scheduling Algorithm for High Density MIMO Channels C.Elayaraja 1, P.Manju 2, I.Parsana Begam 3 Associate Professor 1, Student 2, 3 Department
ISSN XXXX XXXX 2018 IJESC Research Article Volume 8 Issue No.4 Scheduling Algorithm for High Density MIMO Channels C.Elayaraja 1, P.Manju 2, I.Parsana Begam 3 Associate Professor 1, Student 2, 3 Department
Design of Automated Digital Eye Palpation Exam for Intraocular Pressure Measurement
 Design of Automated Digital Eye Palpation Exam for Intraocular Pressure Measurement Item Type text; Electronic Thesis Authors Luce, Alexander Vallejo Publisher The University of Arizona. Rights Copyright
Design of Automated Digital Eye Palpation Exam for Intraocular Pressure Measurement Item Type text; Electronic Thesis Authors Luce, Alexander Vallejo Publisher The University of Arizona. Rights Copyright
Introduction To MATLAB Interactive Graphics
 Introduction To MATLAB Interactive Graphics Eric Peasley, Department of Engineering Science, University of Oxford version 3.0, 2017 An Introduction to MATLAB Interactive Graphics Table of Contents Data
Introduction To MATLAB Interactive Graphics Eric Peasley, Department of Engineering Science, University of Oxford version 3.0, 2017 An Introduction to MATLAB Interactive Graphics Table of Contents Data
GENDER ESTIMATION BASED ON FACIAL IMAGE AZLIN BT YAJID UNIVERSITI TEKNOLOGI MALAYSIA
 GENDER ESTIMATION BASED ON FACIAL IMAGE AZLIN BT YAJID UNIVERSITI TEKNOLOGI MALAYSIA PSZ 19:16 (PIND. 1/97) UNIVERSITI TEKNOLOGI MALAYSIA BORANG PENGESAHAN STATUS TESIS JUDUL: GENDER ESTIMATION BASED ON
GENDER ESTIMATION BASED ON FACIAL IMAGE AZLIN BT YAJID UNIVERSITI TEKNOLOGI MALAYSIA PSZ 19:16 (PIND. 1/97) UNIVERSITI TEKNOLOGI MALAYSIA BORANG PENGESAHAN STATUS TESIS JUDUL: GENDER ESTIMATION BASED ON
The Language of Technical Computing. Computation. Visualization. Programming. Creating Graphical User Interfaces Version 1
 MATLAB The Language of Technical Computing Computation Visualization Programming Creating Graphical User Interfaces Version 1 How to Contact The MathWorks: 508-647-7000 Phone 508-647-7001 Fax The MathWorks,
MATLAB The Language of Technical Computing Computation Visualization Programming Creating Graphical User Interfaces Version 1 How to Contact The MathWorks: 508-647-7000 Phone 508-647-7001 Fax The MathWorks,
Blind to Change. More on Graphical User Interfaces. Exploring change blindness
 Blind to Change More on Graphical User Interfaces CS112 Scientific Computation Department of Computer Science Wellesley College Exploring change blindness The human visual system can be blind to changes
Blind to Change More on Graphical User Interfaces CS112 Scientific Computation Department of Computer Science Wellesley College Exploring change blindness The human visual system can be blind to changes
SBT 645 Introduction to Scientific Computing in Sports Science #5
 SBT 645 Introduction to Scientific Computing in Sports Science #5 SERDAR ARITAN serdar.aritan@hacettepe.edu.tr Biyomekanik Araştırma Grubu www.biomech.hacettepe.edu.tr Spor Bilimleri Fakültesi www.sbt.hacettepe.edu.tr
SBT 645 Introduction to Scientific Computing in Sports Science #5 SERDAR ARITAN serdar.aritan@hacettepe.edu.tr Biyomekanik Araştırma Grubu www.biomech.hacettepe.edu.tr Spor Bilimleri Fakültesi www.sbt.hacettepe.edu.tr
Part #10. AE0B17MTB Matlab. Miloslav Čapek Viktor Adler, Pavel Valtr, Filip Kozák
 AE0B17MTB Matlab Part #10 Miloslav Čapek miloslav.capek@fel.cvut.cz Viktor Adler, Pavel Valtr, Filip Kozák Department of Electromagnetic Field B2-634, Prague Learning how to GUI #2 user? GUI function3
AE0B17MTB Matlab Part #10 Miloslav Čapek miloslav.capek@fel.cvut.cz Viktor Adler, Pavel Valtr, Filip Kozák Department of Electromagnetic Field B2-634, Prague Learning how to GUI #2 user? GUI function3
UNIVERSITÀ DEGLI STUDI DI PADOVA
 UNIVERSITÀ DEGLI STUDI DI PADOVA FACOLTÀ DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA BIOMEDICA DESIGN OF NEUROPHYSIOLOGICAL SIGNAL ANAYSIS SOFTWARE GIACOMO BASSETTO SUPERVISOR: PROFESSOR STEFANO VASSANELLI
UNIVERSITÀ DEGLI STUDI DI PADOVA FACOLTÀ DI INGEGNERIA CORSO DI LAUREA IN INGEGNERIA BIOMEDICA DESIGN OF NEUROPHYSIOLOGICAL SIGNAL ANAYSIS SOFTWARE GIACOMO BASSETTO SUPERVISOR: PROFESSOR STEFANO VASSANELLI
Ultraplatjoslas radaru izmantošana automašīnu skaitīšanai
 Projekts: Valsts pētījumu programmas SOPHIS Projekts Nr.4. Tehnoloģijas drošai un uzticamai gudrajai pilsētai Ultraplatjoslas radaru izmantošana automašīnu skaitīšanai Tehnoloģijas lietošanas apraksts
Projekts: Valsts pētījumu programmas SOPHIS Projekts Nr.4. Tehnoloģijas drošai un uzticamai gudrajai pilsētai Ultraplatjoslas radaru izmantošana automašīnu skaitīšanai Tehnoloģijas lietošanas apraksts
LAMPIRAN A: LISTING PROGRAM
 A-1 LAMPIRAN A: LISTING PROGRAM 1. Latih.m input = xlsread('ayam1.xlsx', 'Sheet1', 'B2:P49'); %memasukkan input dari excel file Ayam, sheet Sheet1, baris kolom 'B2:BJ17' input= input'; %transpose input
A-1 LAMPIRAN A: LISTING PROGRAM 1. Latih.m input = xlsread('ayam1.xlsx', 'Sheet1', 'B2:P49'); %memasukkan input dari excel file Ayam, sheet Sheet1, baris kolom 'B2:BJ17' input= input'; %transpose input
Intel Quark microcontroller D2000 How to communicate with MATLAB over UART
 Intel Quark microcontroller D2000 How to communicate with MATLAB over UART Introduction Intel System Studio 2016 for Microcontrollers is an integrated tool suite for developing, optimizing, and debugging
Intel Quark microcontroller D2000 How to communicate with MATLAB over UART Introduction Intel System Studio 2016 for Microcontrollers is an integrated tool suite for developing, optimizing, and debugging
Special Topics II: Graphical User Interfaces (GUIs)
") Special Topics II: Graphical User Interfaces (GUIs) December 8, 2011 Structures Structures (structs, for short) are a way of managing and storing data in most programming languages, including MATLAB. Assuming
Special Topics II: Graphical User Interfaces (GUIs) December 8, 2011 Structures Structures (structs, for short) are a way of managing and storing data in most programming languages, including MATLAB. Assuming
Sandia National Laboratories: Implementation of and Experimenting with a Clustering Tool
 Sandia National Laboratories: Implementation of and Experimenting with a Clustering Tool Team: Avani Gadani, Daniel Lowd, Brian Roney, Eric Wu Harvey Mudd College Dr. Belinda Thom (Advisor) Dr. Kevin Boyack
Sandia National Laboratories: Implementation of and Experimenting with a Clustering Tool Team: Avani Gadani, Daniel Lowd, Brian Roney, Eric Wu Harvey Mudd College Dr. Belinda Thom (Advisor) Dr. Kevin Boyack
Still More About Matlab GUI s (v. 1.3) Popup Menus. Popup Menu Exercise. Still More GUI Info - GE /29/2012. Copyright C. S. Tritt, Ph.D.
 Popup Menus. Popup Menu Exercise. Still More GUI Info - GE /29/2012. Copyright C. S. Tritt, Ph.D.") Still More About Matlab GUI s (v. 1.3) Dr. C. S. Tritt with slides from Dr. J. LaMack January 24, 2012 Popup Menus User selects one from a mutually exclusive list of options The String property is typically
Still More About Matlab GUI s (v. 1.3) Dr. C. S. Tritt with slides from Dr. J. LaMack January 24, 2012 Popup Menus User selects one from a mutually exclusive list of options The String property is typically
Computational Methods of Scientific Programming. Matlab Lecture 3 Lecturers Thomas A Herring Chris Hill
 12.010 Computational Methods of Scientific Programming Matlab Lecture 3 Lecturers Thomas A Herring Chris Hill Summary of last class Continued examining Matlab operations path and addpath commands Variables
12.010 Computational Methods of Scientific Programming Matlab Lecture 3 Lecturers Thomas A Herring Chris Hill Summary of last class Continued examining Matlab operations path and addpath commands Variables
Interactive Programs
 Interactive Programs Graphical User Interfaces CS112 Scientific Computation Department of Computer Science Wellesley College Properties of graphics objects All plotting and graphics functions create graphic
Interactive Programs Graphical User Interfaces CS112 Scientific Computation Department of Computer Science Wellesley College Properties of graphics objects All plotting and graphics functions create graphic
Building a Graphical User Interface
 148 CHAPTER 9 Building a Graphical User Interface Building a Graphical User Interface CHAPTER 9 9.1 Getting started with GUIDE 9.2 Starting an action with a GUI element 9.3 Communicating with GUI elements
148 CHAPTER 9 Building a Graphical User Interface Building a Graphical User Interface CHAPTER 9 9.1 Getting started with GUIDE 9.2 Starting an action with a GUI element 9.3 Communicating with GUI elements
CS547, Neural Networks: Homework 5
 CS547, Neural Networks: Homework 5 Christopher E. Davis - chris2d@cs.unm.edu University of New Mexico November 16, 2004 1 Computer Problem Radial Basis Function Learning a) Treat this assignment as a function
CS547, Neural Networks: Homework 5 Christopher E. Davis - chris2d@cs.unm.edu University of New Mexico November 16, 2004 1 Computer Problem Radial Basis Function Learning a) Treat this assignment as a function
SECTION 2: PROGRAMMING WITH MATLAB. MAE 4020/5020 Numerical Methods with MATLAB
 SECTION 2: PROGRAMMING WITH MATLAB MAE 4020/5020 Numerical Methods with MATLAB 2 Functions and M Files M Files 3 Script file so called due to.m filename extension Contains a series of MATLAB commands The
SECTION 2: PROGRAMMING WITH MATLAB MAE 4020/5020 Numerical Methods with MATLAB 2 Functions and M Files M Files 3 Script file so called due to.m filename extension Contains a series of MATLAB commands The
BUILDING A MATLAB GUI. Education Transfer Plan Seyyed Khandani, Ph.D. IISME 2014
 BUILDING A MATLAB GUI Education Transfer Plan Seyyed Khandani, Ph.D. IISME 2014 Graphical User Interface (GUI) A GUI is useful for presenting your final software. It makes adjusting parameters and visualizing
BUILDING A MATLAB GUI Education Transfer Plan Seyyed Khandani, Ph.D. IISME 2014 Graphical User Interface (GUI) A GUI is useful for presenting your final software. It makes adjusting parameters and visualizing
GUI Building for Test & Measurement Applications
 by: Ahmed Abdalla, The MathWorks GUI Building for Test & Measurement Applications This article demonstrates how you can utilize the below-listed products to create a custom test and measurement GUI application
by: Ahmed Abdalla, The MathWorks GUI Building for Test & Measurement Applications This article demonstrates how you can utilize the below-listed products to create a custom test and measurement GUI application
DAFTAR ISI. HALAMAN JUDUL... Error! Bookmark not defined. LEMBAR PERSETUJUAN... Error! Bookmark not defined.
 DAFTAR ISI Hlm HALAMAN JUDUL... Error! Bookmark not LEMBAR PERSETUJUAN... Error! Bookmark not LEMBAR PENGESAHAN... Error! Bookmark not LEMBAR PERSEMBAHAN... Error! Bookmark not ABSTRAK... Error! Bookmark
DAFTAR ISI Hlm HALAMAN JUDUL... Error! Bookmark not LEMBAR PERSETUJUAN... Error! Bookmark not LEMBAR PENGESAHAN... Error! Bookmark not LEMBAR PERSEMBAHAN... Error! Bookmark not ABSTRAK... Error! Bookmark
INTRODUCTION TO MATLAB INTERACTIVE GRAPHICS EXERCISES
 INTRODUCTION TO MATLAB INTERACTIVE GRAPHICS EXERCISES Eric Peasley, Department of Engineering Science, University of Oxford version 3.0, 2017 MATLAB Interactive Graphics Exercises In these exercises you
INTRODUCTION TO MATLAB INTERACTIVE GRAPHICS EXERCISES Eric Peasley, Department of Engineering Science, University of Oxford version 3.0, 2017 MATLAB Interactive Graphics Exercises In these exercises you
Flow Control. Spring Flow Control Spring / 26
 Flow Control Spring 2019 Flow Control Spring 2019 1 / 26 Relational Expressions Conditions in if statements use expressions that are conceptually either true or false. These expressions are called relational
Flow Control Spring 2019 Flow Control Spring 2019 1 / 26 Relational Expressions Conditions in if statements use expressions that are conceptually either true or false. These expressions are called relational
LAMPIRAN. Tests of Normality. Kolmogorov-Smirnov a. Berat_Limfa KB KP P
 LAMPIRAN 1. Data Analisis Statistik 1.1 Berat Limpa U1 U2 U3 U4 U5 U6 Rata- SD Rata KB 0.53 0.17 0.18 0.2 0.18 0.13 0.23 0.15 KP 0.31 0.27 0.27 0.27 0.11 0.23 0.24 0.07 P1 0.23 0.21 0.12 0.2 0.24 0.23
LAMPIRAN 1. Data Analisis Statistik 1.1 Berat Limpa U1 U2 U3 U4 U5 U6 Rata- SD Rata KB 0.53 0.17 0.18 0.2 0.18 0.13 0.23 0.15 KP 0.31 0.27 0.27 0.27 0.11 0.23 0.24 0.07 P1 0.23 0.21 0.12 0.2 0.24 0.23
W1005 Intro to CS and Programming in MATLAB. Data Structures. Fall 2014 Instructor: Ilia Vovsha. hep://
 W1005 Intro to CS and Programming in MATLAB Data Structures Fall 2014 Instructor: Ilia Vovsha hep://www.cs.columbia.edu/~vovsha/w1005 Outline Cell arrays FuncNons with variable arguments Structure arrays
W1005 Intro to CS and Programming in MATLAB Data Structures Fall 2014 Instructor: Ilia Vovsha hep://www.cs.columbia.edu/~vovsha/w1005 Outline Cell arrays FuncNons with variable arguments Structure arrays
C Language Advanced Concepts. Microcomputer Architecture and Interfacing Colorado School of Mines Professor William Hoff
 C Language Advanced Concepts 1 Switch Statement Syntax Example switch (expression) { } case const_expr1: statement1; case const_expr2: : statement2; default: statementn; The break statement causes control
C Language Advanced Concepts 1 Switch Statement Syntax Example switch (expression) { } case const_expr1: statement1; case const_expr2: : statement2; default: statementn; The break statement causes control
Computational Methods of Scientific Programming
 12.010 Computational Methods of Scientific Programming Lecturers Thomas A Herring, Jim Elliot, Chris Hill, Summary of last class Continued examining Matlab operations path and addpath commands Variables
12.010 Computational Methods of Scientific Programming Lecturers Thomas A Herring, Jim Elliot, Chris Hill, Summary of last class Continued examining Matlab operations path and addpath commands Variables
ECSE 321 Assignment 2
 ECSE 321 Assignment 2 Instructions: This assignment is worth a total of 40 marks. The assignment is due by noon (12pm) on Friday, April 5th 2013. The preferred method of submission is to submit a written
ECSE 321 Assignment 2 Instructions: This assignment is worth a total of 40 marks. The assignment is due by noon (12pm) on Friday, April 5th 2013. The preferred method of submission is to submit a written
Chapter 6 User-Defined Functions. dr.dcd.h CS 101 /SJC 5th Edition 1
 Chapter 6 User-Defined Functions dr.dcd.h CS 101 /SJC 5th Edition 1 MATLAB Functions M-files are collections of MATLAB statements that stored in a file, called a script file. Script files share the command
Chapter 6 User-Defined Functions dr.dcd.h CS 101 /SJC 5th Edition 1 MATLAB Functions M-files are collections of MATLAB statements that stored in a file, called a script file. Script files share the command
Additions to the CREWES Matlab Library
 Additions to CREWES library Additions to the CREWES Matlab Library Christopher B. Harrison ABSTRACT This report will show and discuss the various Matlab programs that have been significantly altered and
Additions to CREWES library Additions to the CREWES Matlab Library Christopher B. Harrison ABSTRACT This report will show and discuss the various Matlab programs that have been significantly altered and
PFLib An Object Oriented MATLAB Toolbox for Particle Filtering
 PFLib An Object Oriented MATLAB Toolbox for Particle Filtering Lingji Chen a, Chihoon Lee b, Amarjit Budhiraja b and Raman K. Mehra a a Scientific Systems Company Inc., Woburn, MA, USA; b University of
PFLib An Object Oriented MATLAB Toolbox for Particle Filtering Lingji Chen a, Chihoon Lee b, Amarjit Budhiraja b and Raman K. Mehra a a Scientific Systems Company Inc., Woburn, MA, USA; b University of
LAMPIRAN 1 PENGARUH KETERSEDIAAN KOLEKSI PERPUSTAKAAN TERHADAP MINAT BACA SISWA SMP NEGERI 30 MEDAN
 LAMPIRAN 1 ANGKET PENELITIAN PENGARUH KETERSEDIAAN KOLEKSI PERPUSTAKAAN TERHADAP MINAT BACA SISWA SMP NEGERI 30 MEDAN Saya mengharapkan kesediaan Saudara untuk mengisi angket dalam rangka penelitian tetang
LAMPIRAN 1 ANGKET PENELITIAN PENGARUH KETERSEDIAAN KOLEKSI PERPUSTAKAAN TERHADAP MINAT BACA SISWA SMP NEGERI 30 MEDAN Saya mengharapkan kesediaan Saudara untuk mengisi angket dalam rangka penelitian tetang
PFLib An Object Oriented MATLAB Toolbox for Particle Filtering
 PFLib An Object Oriented MATLAB Toolbox for Particle Filtering Lingji Chen a, Chihoon Lee b, Amarjit Budhiraja b and Raman K. Mehra a a Scientific Systems Company Inc., Woburn, MA, USA; b University of
PFLib An Object Oriented MATLAB Toolbox for Particle Filtering Lingji Chen a, Chihoon Lee b, Amarjit Budhiraja b and Raman K. Mehra a a Scientific Systems Company Inc., Woburn, MA, USA; b University of
Introduction to Problem Solving and Programming in Python.
 Introduction to Problem Solving and Programming in Python http://cis-linux1.temple.edu/~tuf80213/courses/temple/cis1051/ Overview Types of errors Testing methods Debugging in Python 2 Errors An error in
Introduction to Problem Solving and Programming in Python http://cis-linux1.temple.edu/~tuf80213/courses/temple/cis1051/ Overview Types of errors Testing methods Debugging in Python 2 Errors An error in
1 >> Lecture 3 2 >> 3 >> -- Functions 4 >> Zheng-Liang Lu 169 / 221
 1 >> Lecture 3 2 >> 3 >> -- Functions 4 >> Zheng-Liang Lu 169 / 221 Functions Recall that an algorithm is a feasible solution to the specific problem. 1 A function is a piece of computer code that accepts
1 >> Lecture 3 2 >> 3 >> -- Functions 4 >> Zheng-Liang Lu 169 / 221 Functions Recall that an algorithm is a feasible solution to the specific problem. 1 A function is a piece of computer code that accepts
Purpose: How to train an MLP neural network in MATLAB environment!
 Purpose: How to train an MLP neural network in MATLAB environment! that is For good computations, we need good formulae for good algorithms; and good visualization for good illustration and proper testing
Purpose: How to train an MLP neural network in MATLAB environment! that is For good computations, we need good formulae for good algorithms; and good visualization for good illustration and proper testing
Computational Methods of Scientific Programming
 12.010 Computational Methods of Scientific Programming Lecturers Thomas A Herring, Jim Elliot, Chris Hill, Summary of Today s class We will look at Matlab: History Getting help Variable definitions and
12.010 Computational Methods of Scientific Programming Lecturers Thomas A Herring, Jim Elliot, Chris Hill, Summary of Today s class We will look at Matlab: History Getting help Variable definitions and
1 >> Lecture 3 2 >> 3 >> -- Functions 4 >> Zheng-Liang Lu 172 / 225
 1 >> Lecture 3 2 >> 3 >> -- Functions 4 >> Zheng-Liang Lu 172 / 225 Functions The first thing of the design of algorithms is to divide and conquer. A large and complex problem would be solved by couples
1 >> Lecture 3 2 >> 3 >> -- Functions 4 >> Zheng-Liang Lu 172 / 225 Functions The first thing of the design of algorithms is to divide and conquer. A large and complex problem would be solved by couples
MATLAB for the Sciences
 Error Checking,, and MATLAB Movies January 26, 2009 Making Sure Things Work Correctly All through each program we ve assumed that inputs are of a certain type and dimension. What if someone stumbles upon
Error Checking,, and MATLAB Movies January 26, 2009 Making Sure Things Work Correctly All through each program we ve assumed that inputs are of a certain type and dimension. What if someone stumbles upon
ANEXO G. % Se calcula el valor de la señal cuando a llegado % al 28.3% y 63.2% de su de su cambio total.
 ANEXO G CÓDIGOS DE LOS PROGRAMAS DE MATLAB function [Kp,tao,to]=ajuste_fit3(c,t,dm) % Ajuste de una curva por el mètodo del FIT3 % A la función se le pasan los valores del tiempo, la salida y el cambio
ANEXO G CÓDIGOS DE LOS PROGRAMAS DE MATLAB function [Kp,tao,to]=ajuste_fit3(c,t,dm) % Ajuste de una curva por el mètodo del FIT3 % A la función se le pasan los valores del tiempo, la salida y el cambio
DAFTAR ISI. ABSTRAK... Error! Bookmark not defined. ABSTRACT... Error! Bookmark not defined. KATA PENGANTAR... Error! Bookmark not defined.
 DAFTAR ISI ABSTRAK... Error! Bookmark not ABSTRACT... Error! Bookmark not KATA PENGANTAR... Error! Bookmark not DAFTAR ISI... 64 DAFTAR TABEL... 67 DAFTAR GAMBAR... 68 BAB I PENDAHULUAN... Error! Bookmark
DAFTAR ISI ABSTRAK... Error! Bookmark not ABSTRACT... Error! Bookmark not KATA PENGANTAR... Error! Bookmark not DAFTAR ISI... 64 DAFTAR TABEL... 67 DAFTAR GAMBAR... 68 BAB I PENDAHULUAN... Error! Bookmark
Excel Tools Features... 1 Comments... 2 List Comments Formatting... 3 Center Across... 3 Hide Blank Rows... 3 Lists... 3 Sheet Links...
 CONTEXTURES EXCEL TOOLS FEATURES LIST PAGE 1 Excel Tools Features The following features are contained in the Excel Tools Add-in. Excel Tools Features... 1 Comments... 2 List Comments... 2 Comments...
CONTEXTURES EXCEL TOOLS FEATURES LIST PAGE 1 Excel Tools Features The following features are contained in the Excel Tools Add-in. Excel Tools Features... 1 Comments... 2 List Comments... 2 Comments...
ECE Lesson Plan - Class 1 Fall, 2001
 ECE 201 - Lesson Plan - Class 1 Fall, 2001 Software Development Philosophy Matrix-based numeric computation - MATrix LABoratory High-level programming language - Programming data type specification not
ECE 201 - Lesson Plan - Class 1 Fall, 2001 Software Development Philosophy Matrix-based numeric computation - MATrix LABoratory High-level programming language - Programming data type specification not
5. SystemVerilog 3.1 scheduling semantics
 5. SystemVerilog 3.1 scheduling semantics Extracted from IEEE Std. 1364-2001 Edited and expanded by Phil Moorby Feb 2003 Edited by David Smith Feb 2003 Version 6. 5.1 Execution of a hardware model and
5. SystemVerilog 3.1 scheduling semantics Extracted from IEEE Std. 1364-2001 Edited and expanded by Phil Moorby Feb 2003 Edited by David Smith Feb 2003 Version 6. 5.1 Execution of a hardware model and
Matlab for Engineers
 Matlab for Engineers Alistair Johnson 31st May 2012 Centre for Doctoral Training in Healthcare Innovation Institute of Biomedical Engineering Department of Engineering Science University of Oxford Supported
Matlab for Engineers Alistair Johnson 31st May 2012 Centre for Doctoral Training in Healthcare Innovation Institute of Biomedical Engineering Department of Engineering Science University of Oxford Supported
Documentation for LISP in BASIC
 Documentation for LISP in BASIC The software and the documentation are both Copyright 2008 Arthur Nunes-Harwitt LISP in BASIC is a LISP interpreter for a Scheme-like dialect of LISP, which happens to have
Documentation for LISP in BASIC The software and the documentation are both Copyright 2008 Arthur Nunes-Harwitt LISP in BASIC is a LISP interpreter for a Scheme-like dialect of LISP, which happens to have
Flow Control and Functions
 Flow Control and Functions Script files If's and For's Basics of writing functions Checking input arguments Variable input arguments Output arguments Documenting functions Profiling and Debugging Introduction
Flow Control and Functions Script files If's and For's Basics of writing functions Checking input arguments Variable input arguments Output arguments Documenting functions Profiling and Debugging Introduction
10 M-File Programming
 MATLAB Programming: A Quick Start Files that contain MATLAB language code are called M-files. M-files can be functions that accept arguments and produce output, or they can be scripts that execute a series
MATLAB Programming: A Quick Start Files that contain MATLAB language code are called M-files. M-files can be functions that accept arguments and produce output, or they can be scripts that execute a series
Office 2016 Excel Basics 06 Video/Class Project #18 Excel Basics 6: Customize Quick Access Toolbar (QAT) and Show New Ribbon Tabs
 and Show New Ribbon Tabs") **These pdf Notes are for video 6-8. Scroll down to see notes for all three videos. Office 2016 Excel Basics 06 Video/Class Project #18 Excel Basics 6: Customize Quick Access Toolbar (QAT) and Show New
**These pdf Notes are for video 6-8. Scroll down to see notes for all three videos. Office 2016 Excel Basics 06 Video/Class Project #18 Excel Basics 6: Customize Quick Access Toolbar (QAT) and Show New
LAMPIRAN A PROGRAM FLOWSTONE
 LAMPIRAN A PROGRAM FLOWSTONE A-1 Tampilan GUI pada FlowStone A-2 Program Tambahan yang Dibuat Untuk Membaca Frekuensi A-3 Program Tambahan yang Dibuat Untuk Menyimpan Data A-4 LAMPIRAN B PROGRAM VISUAL
LAMPIRAN A PROGRAM FLOWSTONE A-1 Tampilan GUI pada FlowStone A-2 Program Tambahan yang Dibuat Untuk Membaca Frekuensi A-3 Program Tambahan yang Dibuat Untuk Menyimpan Data A-4 LAMPIRAN B PROGRAM VISUAL
Watch the video below to learn more about freezing panes in Excel. *Video removed from printing pages. To freeze rows:
 Excel 06 Freezing Panes and View Options Introduction Whenever you're working with a lot of data, it can be di icult to compare information in your workbook. Fortunately, Excel includes several tools that
Excel 06 Freezing Panes and View Options Introduction Whenever you're working with a lot of data, it can be di icult to compare information in your workbook. Fortunately, Excel includes several tools that
Introduction. Like other programming languages, MATLAB has means for modifying the flow of a program
 Flow control 1 Introduction Like other programming languages, MATLAB has means for modying the flow of a program All common constructs are implemented in MATLAB: for while then else switch try 2 FOR loops.
Flow control 1 Introduction Like other programming languages, MATLAB has means for modying the flow of a program All common constructs are implemented in MATLAB: for while then else switch try 2 FOR loops.
This homework has an opportunity for substantial extra credit, which is described at the end of this document.
 CS 2316 Pair Homework Box Packer Due: Tuesday, June 17th, before 11:55 PM Out of 100 points Files to submit: 1. boxpacker.py For Help: - TA Helpdesk Schedule posted on class website. - Email TA's or use
CS 2316 Pair Homework Box Packer Due: Tuesday, June 17th, before 11:55 PM Out of 100 points Files to submit: 1. boxpacker.py For Help: - TA Helpdesk Schedule posted on class website. - Email TA's or use
Binary Space Partition Trees. Overview. Binary Space Partitioning Trees (Fuchs, Kedem and Naylor `80)
") Binary Space Partition Trees Anthony Steed, Yiorgos Chrysanthou 999-200, Celine Loscos 200, Jan Kautz 2007-2009 Overview Previous list priority algorithms fail in a number of cases, non of them is completely
Binary Space Partition Trees Anthony Steed, Yiorgos Chrysanthou 999-200, Celine Loscos 200, Jan Kautz 2007-2009 Overview Previous list priority algorithms fail in a number of cases, non of them is completely