ECE 477 Design Review Team 8 Spring Mike Cianciarulo, Josh Wildey, Robert Toepfer, Trent Nelson
|
|
|
- Jonathan Lewis
- 5 years ago
- Views:
Transcription


1 ECE 477 Design Review Team 8 Spring 2008 Mike Cianciarulo, Josh Wildey, Robert Toepfer, Trent Nelson


2 Outline Project overview Project-specific success criteria Block diagram Component selection rationale Packaging design Schematic and theory of operation PCB layout Software design/development status Project completion timeline Questions/discussion
3 Project Overview Part of solution for Purdue IEEE Aerial Robotics team that competes in I.A.R.C. Autonomously navigated rover Control vehicle motion (Direction and Speed) Static sensors interfacing and filtering using μc Structural detection/avoidance Room mapping algorithms (SLAM) Image capturing Compressed image relay to base station Simple Logo identification Wireless (bi-directional) data relay in urban setting b/g (TCP/IP)

4 Project-Specific Success Criteria 1. An ability to control vehicle direction and speed. 2. An ability to detect and avoid obstacles. 3. An ability to autonomously map room and determine vehicle path. 4. An ability to capture still images. 5. An ability to identify a logo within a captured image.

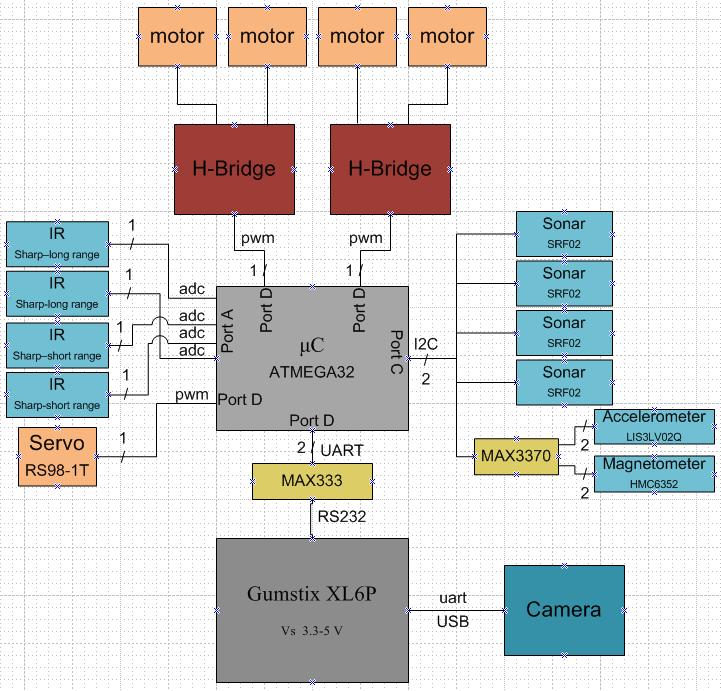
5 Block Diagram
, Camera (USB), wireless communications Microcontroller 6 ADCs, 3 PWMs,")
6 Component Selection Rationale Embedded Computer Requirements Enough computational power for image recognition and room mapping algorithms Small size and robust Interface with μc (UART), Camera (USB), wireless communications Microcontroller 6 ADCs, 3 PWMs, UART, I 2 C
7 Component Selection Rationale Embedded Computer Gumstix XL6P Adequate computation power (600 MHz) Very small form factor 80mm x 20mm 128 MB of RAM RS232 serial to sensors uc Host mode USB to camera Low power (5 V, common to other devices) Ethernet connectivity Triton 320 Maximum of 800 MHz DIMM200 Slot Hard to find small wireless card to connect via PCMCIA Uncommon power requirements (1.8 V) Poor documentation
8 Component Selection Rationale Microcontroller ATmega32 Satisfies all on-chip peripheral requirements Development board already on-hand Familiarity with Atmel microcontrollers Already have DIP and QFP packages of ATmega32 Motorola HCS12 Satisfies all on-chip peripheral requirements
9 Packaging Design Very few packaging constraints Size and weight IR minimum range Wide enough for motors

10 Packaging Design
11 Schematic/Theory of Operation
12 Schematic/Theory of Operation
13 Schematic/Theory of Operation
14 Schematic/Theory of Operation Part Voltage Rail Max Current Units Quantity Total Current Gumstix 5 V 0.5 A ATmega32 5 V A IR(long) 5 V 0.33 A IR(short) 5 V 0.05 A Sonar (I2C) 5 V 0.5 A 4 1 H-Bridge 5 V 0.01 A Accelerometer 3.3 V A Magenetometer 3.3 V A Motor V batt 2.05 A Total Current Draw 5 V Rail Total Current Draw 3.3 V Rail Total Current Draw from V batt 10.5



15 PCB Layout Major Current Draw Gumstix, camera, wireless Micro, sensors, motors Size and weight Needs to fit on helicopter Data Accurate and precise Reliable

16 PCB Layout Use headers to interface Components pre-packaged Sensors go on top Motor Controller on bottom Gumstix, camera, wireless too big


17 PCB Layout Sections Power Volt regulator Volt regulator Battery Analog ADC lines for IR and Motor Controller Digital

18 PCB Layout Microcontroller Bypass Capacitors LC for ADC Power Regulators have bypass capacitors Volt at 1A each Gumstix Everything else
19 PCB Layout


20 PCB Layout Sonar Level Trans IR Power


21 PCB Layout ADC Lines

22 PCB Layout 3.3 V and 5.0 V for Gumstix

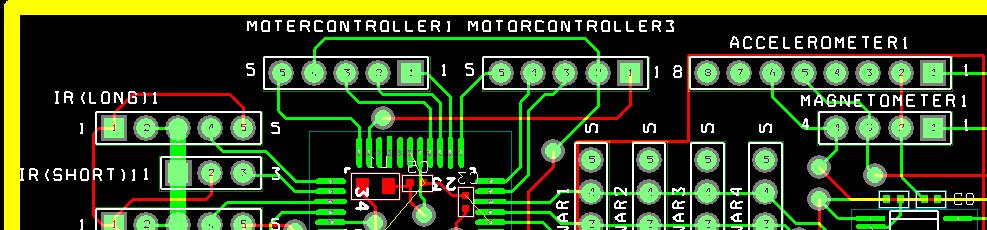
23 PCB Layout Arrangement

24 `PCB Layout Capacitors and LC

25 PCB Layout Copper Pour


26 PCB Layout 3.5 x 2 Copper Pour Changes Headers smaller Route 5 V to sensors Less white space
27 Software Design/Development Status
28 Software Design/Development Status
29 Project Completion Timeline Month Week Task March Interface/test motor controller Receive Gumstix expansion boards Finalize PCB Replace bad magnetometer Order final quantities of sensors Interface Gumstix with camera and base station Test cross compiled OpenCV library Get basic operation of micro controller with all peripherals at once Establish communication between Gumstix and microcontroller Detect obstacles on microcontroller Choose SLAM algorithm Implement SLAM algorithm Debug April 1 Debug 2 3 Debug Complete design Start on final report 4 Complete final report
30 Questions / Discussion
Goal: We want to build an autonomous vehicle (robot)
") Goal: We want to build an autonomous vehicle (robot) This means it will have to think for itself, its going to need a brain Our robot s brain will be a tiny computer called a microcontroller Specifically
Goal: We want to build an autonomous vehicle (robot) This means it will have to think for itself, its going to need a brain Our robot s brain will be a tiny computer called a microcontroller Specifically
Open Sesame. Grant Apodaca Jeffrey Bolin Eric Taba Richie Agpaoa Evin Sellin
 Open Sesame Grant Apodaca Jeffrey Bolin Eric Taba Richie Agpaoa Evin Sellin 1 Description Open Sesame is a portable, affordable, compact and easyto-use door security accessory, that can unlock your door
Open Sesame Grant Apodaca Jeffrey Bolin Eric Taba Richie Agpaoa Evin Sellin 1 Description Open Sesame is a portable, affordable, compact and easyto-use door security accessory, that can unlock your door
ECE 477 Final Report Spring 2008 Team 8 OMAR
 Team 8 OMAR Trent Nelson Mike Cianciarulo Josh Wildey Robert Toepfer Team Members: #1: Signature: Date: #2: Signature: Date: #3: Signature: Date: #4: Signature: Date: CRITERION SCORE MPY PTS Technical
Team 8 OMAR Trent Nelson Mike Cianciarulo Josh Wildey Robert Toepfer Team Members: #1: Signature: Date: #2: Signature: Date: #3: Signature: Date: #4: Signature: Date: CRITERION SCORE MPY PTS Technical
Intel Galileo gen 2 Board
 Intel Galileo gen 2 Board The Arduino Intel Galileo board is a microcontroller board based on the Intel Quark SoC X1000, a 32- bit Intel Pentium -class system on a chip (SoC). It is the first board based
Intel Galileo gen 2 Board The Arduino Intel Galileo board is a microcontroller board based on the Intel Quark SoC X1000, a 32- bit Intel Pentium -class system on a chip (SoC). It is the first board based
Homework 6: Printed Circuit Board Layout Design Narrative
 Homework 6: Printed Circuit Board Layout Design Narrative Team Code Name: Home Kinection Group No. 1 Team Member Completing This Homework: Stephen Larew E-mail Address of Team Member: sglarew @ purdue.edu
Homework 6: Printed Circuit Board Layout Design Narrative Team Code Name: Home Kinection Group No. 1 Team Member Completing This Homework: Stephen Larew E-mail Address of Team Member: sglarew @ purdue.edu
Embedded System Project (521423S) - Specifications
 - Specifications") Embedded System Project (521423S) - Specifications Design phases power consumption, environment etc. partitioning, basic solutions System requirements Sketch of hardware Sketch of software operation procedures
Embedded System Project (521423S) - Specifications Design phases power consumption, environment etc. partitioning, basic solutions System requirements Sketch of hardware Sketch of software operation procedures
Robotics Training Module ABLab Solutions
 Robotics Training Module ABLab Solutions www.ablab.in Table of Contents Course Outline... 4 Introduction to Robotics... 4 Overview of Basic Electronic... 4 Overview of Digital Electronic... 4 Power Supply...
Robotics Training Module ABLab Solutions www.ablab.in Table of Contents Course Outline... 4 Introduction to Robotics... 4 Overview of Basic Electronic... 4 Overview of Digital Electronic... 4 Power Supply...
Unlocking the Potential of Your Microcontroller
 Unlocking the Potential of Your Microcontroller Ethan Wu Storming Robots, Branchburg NJ, USA Abstract. Many useful hardware features of advanced microcontrollers are often not utilized to their fullest
Unlocking the Potential of Your Microcontroller Ethan Wu Storming Robots, Branchburg NJ, USA Abstract. Many useful hardware features of advanced microcontrollers are often not utilized to their fullest
Homework 5: Circuit Design and Theory of Operation Due: Friday, February 24, at NOON
 Homework 5: Circuit Design and Theory of Operation Due: Friday, February 24, at NOON Team Code Name: Motion Tracking Laser Platform Group No.: 9 Team Member Completing This Homework: David Kristof NOTE:
Homework 5: Circuit Design and Theory of Operation Due: Friday, February 24, at NOON Team Code Name: Motion Tracking Laser Platform Group No.: 9 Team Member Completing This Homework: David Kristof NOTE:
Interesting Items Volume 16. Dave Jaffe 04/23/2011
 Interesting Items Volume 16 Dave Jaffe 04/23/2011 Caveats I came across these products in recent magazines I have not bought or used these products I do not endorse these products I do not know much more
Interesting Items Volume 16 Dave Jaffe 04/23/2011 Caveats I came across these products in recent magazines I have not bought or used these products I do not endorse these products I do not know much more
Autonomous, Surveillance Fire Extinguisher Robotic Vehicle with Obstacle Detection and Bypass using Arduino Microcontroller
 Autonomous, Surveillance Fire Extinguisher Robotic Vehicle with Obstacle Detection and Bypass using Arduino Microcontroller Sumanta Chatterjee Asst. Professor JIS College of Engineering Kalyani, WB, India
Autonomous, Surveillance Fire Extinguisher Robotic Vehicle with Obstacle Detection and Bypass using Arduino Microcontroller Sumanta Chatterjee Asst. Professor JIS College of Engineering Kalyani, WB, India
Modular Rapid Monitoring System
 Modular Rapid Monitoring System Timothy Kritzler and Joseph Mintun Sponsor: Martin Engineering, Illinois Advisors: Dr. Malinowski and Dr. Ahn Bradley University Electrical and Computer Engineering October
Modular Rapid Monitoring System Timothy Kritzler and Joseph Mintun Sponsor: Martin Engineering, Illinois Advisors: Dr. Malinowski and Dr. Ahn Bradley University Electrical and Computer Engineering October
CprE 288 Introduction to Embedded Systems (Project and Platform Overview)
") CprE 288 Introduction to Embedded Systems (Project and Platform Overview) Instructor: Dr. Phillip Jones http://class.ece.iastate.edu/cpre288 1 Overview of Today s Lecture Announcements What are Embedded
CprE 288 Introduction to Embedded Systems (Project and Platform Overview) Instructor: Dr. Phillip Jones http://class.ece.iastate.edu/cpre288 1 Overview of Today s Lecture Announcements What are Embedded
Homework 3: Design Constraint Analysis and Component Selection Rationale
 Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: 2D-MPR Group No. 12 Team Member Completing This Homework: James Phillips E-mail Address of Team Member: jephilli@
Homework 3: Design Constraint Analysis and Component Selection Rationale Team Code Name: 2D-MPR Group No. 12 Team Member Completing This Homework: James Phillips E-mail Address of Team Member: jephilli@
EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 25th 2010
 Final Report April 25th 2010") Nguyen Nguyen Situation See Spot Track 1 EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 25th 2010 Project Title: See Spot Track Team Name: Nguyen Nguyen Situation Team Members:
Nguyen Nguyen Situation See Spot Track 1 EEL 4924 Electrical Engineering Design (Senior Design) Final Report April 25th 2010 Project Title: See Spot Track Team Name: Nguyen Nguyen Situation Team Members:
GROUP 23 Military Surveillance Robotic Vehicle. Ryan Hromada - EE John Baumgartner - EE Austin King - CpE Kevin Plaza - CpE
 GROUP 23 Military Surveillance Robotic Vehicle Ryan Hromada - EE John Baumgartner - EE Austin King - CpE Kevin Plaza - CpE INTRODUCTION Autonomous tracking vehicle Commands: Basic Movement Commands Wander
GROUP 23 Military Surveillance Robotic Vehicle Ryan Hromada - EE John Baumgartner - EE Austin King - CpE Kevin Plaza - CpE INTRODUCTION Autonomous tracking vehicle Commands: Basic Movement Commands Wander
CSE 466 Exam 1 Winter, 2010
 This take-home exam has 100 points and is due at the beginning of class on Friday, Feb. 13. (!!!) Please submit printed output if possible. Otherwise, write legibly. Both the Word document and the PDF
This take-home exam has 100 points and is due at the beginning of class on Friday, Feb. 13. (!!!) Please submit printed output if possible. Otherwise, write legibly. Both the Word document and the PDF
PCB Design for Capacitance Rain Sensor
 PCB Design for Capacitance Rain Sensor Danny Kang April 14, 2010 EXECUTIVE SUMMARY The definition of sensor is a device that measures a physical quantity and converts it into a signal which can be read
PCB Design for Capacitance Rain Sensor Danny Kang April 14, 2010 EXECUTIVE SUMMARY The definition of sensor is a device that measures a physical quantity and converts it into a signal which can be read
Technical Specification for Educational Robots
 Technical Specification for Educational Robots 1. Introduction The e-yantra project, sponsored by MHRD, aims to start a robotic revolution in the country through the deployment of low-cost educational
Technical Specification for Educational Robots 1. Introduction The e-yantra project, sponsored by MHRD, aims to start a robotic revolution in the country through the deployment of low-cost educational
AeroCore 2 for DragonBoard
 AeroCore 2 for DragonBoard TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special or consequential
AeroCore 2 for DragonBoard TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special or consequential
1.0. Presents. techathon 3.0
 1.0 Presents techathon 3.0 Course Content - techathon techathon 3.0 is a Robotics and Embedded systems Workshop designed by team Robo-Minions. It is a 2 days workshop with each day divided into two sessions
1.0 Presents techathon 3.0 Course Content - techathon techathon 3.0 is a Robotics and Embedded systems Workshop designed by team Robo-Minions. It is a 2 days workshop with each day divided into two sessions
TEVATRON TECHNOLOGIES PVT. LTD Embedded! Robotics! IoT! VLSI Design! Projects! Technical Consultancy! Education! STEM! Software!
 Summer Training 2016 Advance Embedded Systems Fast track of AVR and detailed working on STM32 ARM Processor with RTOS- Real Time Operating Systems Covering 1. Hands on Topics and Sessions Covered in Summer
Summer Training 2016 Advance Embedded Systems Fast track of AVR and detailed working on STM32 ARM Processor with RTOS- Real Time Operating Systems Covering 1. Hands on Topics and Sessions Covered in Summer
MAVRIC-IIB Mega AVR Integrated Controller II Revision B Technical Manual
 MAVRIC-IIB Mega AVR Integrated Controller II Revision B Technical Manual BDMICRO http://www.bdmicro.com/ March 28, 2005 Copyright (c) 2004 BDMICRO All Rights Reserved. MAVRIC-IIB Technical Manual March
MAVRIC-IIB Mega AVR Integrated Controller II Revision B Technical Manual BDMICRO http://www.bdmicro.com/ March 28, 2005 Copyright (c) 2004 BDMICRO All Rights Reserved. MAVRIC-IIB Technical Manual March
A.U.R.A.S Autonomous Ultrasonic Robot for Area Scanning
 A.U.R.A.S Autonomous Ultrasonic Robot for Area Scanning Project Presentation ECE 511 Fall 2014 George Mason University 12/05/2014 Group: 2 Team Members: DevarajDhakshinamurthy Krishna Nikhila Kalinga Gagandeep
A.U.R.A.S Autonomous Ultrasonic Robot for Area Scanning Project Presentation ECE 511 Fall 2014 George Mason University 12/05/2014 Group: 2 Team Members: DevarajDhakshinamurthy Krishna Nikhila Kalinga Gagandeep
UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES. 8 th April 2010 Phang Swee King
 UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES 8 th April 2010 Phang Swee King OUTLINES Introduction Platform Design Helicopter Avionics System Ground Station Sensors Measurement
UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES 8 th April 2010 Phang Swee King OUTLINES Introduction Platform Design Helicopter Avionics System Ground Station Sensors Measurement
Society A Publish/Subscribe Architecture for Behavior Based Control
 Society A Publish/Subscribe Architecture for Behavior Based Control CPE 426 - Senior Projects Hardware Component Lance Hutchinson Department of Computer Science and Engineering University of Nevada, Reno
Society A Publish/Subscribe Architecture for Behavior Based Control CPE 426 - Senior Projects Hardware Component Lance Hutchinson Department of Computer Science and Engineering University of Nevada, Reno
12v Power Controller Project Board
 12v Power Controller Project Board 12 Volt Power Controller Introduction This board provides three functions... DC power gate Low voltage disconnect Voltage / current display The typical usage for this
12v Power Controller Project Board 12 Volt Power Controller Introduction This board provides three functions... DC power gate Low voltage disconnect Voltage / current display The typical usage for this
OBSTACLE AVOIDANCE ROBOT
 e-issn 2455 1392 Volume 3 Issue 4, April 2017 pp. 85 89 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com OBSTACLE AVOIDANCE ROBOT Sanjay Jaiswal 1, Saurabh Kumar Singh 2, Rahul Kumar 3 1,2,3
e-issn 2455 1392 Volume 3 Issue 4, April 2017 pp. 85 89 Scientific Journal Impact Factor : 3.468 http://www.ijcter.com OBSTACLE AVOIDANCE ROBOT Sanjay Jaiswal 1, Saurabh Kumar Singh 2, Rahul Kumar 3 1,2,3
AeroCore 2 for Intel Joule Module
 AeroCore 2 for Intel Joule Module TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special
AeroCore 2 for Intel Joule Module TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special
ARDUINO PRIMO. Code: A000135
 ARDUINO PRIMO Code: A000135 Primo combines the processing power from the Nordic nrf52 processor, an Espressif ESP8266 for WiFi, as well as several onboard sensors and a battery charger. The nrf52 includes
ARDUINO PRIMO Code: A000135 Primo combines the processing power from the Nordic nrf52 processor, an Espressif ESP8266 for WiFi, as well as several onboard sensors and a battery charger. The nrf52 includes
Team 2228 CougarTech 1. Training L2. Software Environment
 Team 2228 CougarTech 1 Training L2 Software Environment Team 2228 CougarTech 2 Objectives Understand: Understand the software components Understand the hardware that software interfaces to Understand the
Team 2228 CougarTech 1 Training L2 Software Environment Team 2228 CougarTech 2 Objectives Understand: Understand the software components Understand the hardware that software interfaces to Understand the
Fun Low-power Observer-interactive Waterfall Sponsored by Orlando Utility Commision
 Fun Low-power Observer-interactive Waterfall Sponsored by Orlando Utility Commision Group 5 - Blue Team Connor Heckman - CPE Ben King - EE Robert Perkins - EE Jack Gray - EE Motivation Existing solar sculptures
Fun Low-power Observer-interactive Waterfall Sponsored by Orlando Utility Commision Group 5 - Blue Team Connor Heckman - CPE Ben King - EE Robert Perkins - EE Jack Gray - EE Motivation Existing solar sculptures
Autopilot System. Specification V1.1
 Autopilot System Specification V1.1 Catalog Summary... 1 Specification... 2 1. Hardware... 3 MCU... 3 Sensors... 3 Communication... 3 Power... 3 Extension... 3 2. Interface... 5 1) PIN... 5 2) Looper...
Autopilot System Specification V1.1 Catalog Summary... 1 Specification... 2 1. Hardware... 3 MCU... 3 Sensors... 3 Communication... 3 Power... 3 Extension... 3 2. Interface... 5 1) PIN... 5 2) Looper...
Arduino Internals. Dale Wheat. Apress
 Arduino Internals Dale Wheat Apress Contents About the Authors About the Technical Reviewers Acknowledgments Preface xv xvi xvii xviii Chapter 1: Hardware 1 What Is an Arduino? 1 The Arduino Uno 2 Processor
Arduino Internals Dale Wheat Apress Contents About the Authors About the Technical Reviewers Acknowledgments Preface xv xvi xvii xviii Chapter 1: Hardware 1 What Is an Arduino? 1 The Arduino Uno 2 Processor
Blobo Clone Angry Birds Toy Upgrade. Schedule of the project and log of work done
 Blobo Clone Angry Birds Toy Upgrade Schedule of the project and log of work done DOCUMENT INFORMATION Subject: Authors:, Keywords: Comments: Creation date: 10 December 2012 Revision date: 02/21/13 Print
Blobo Clone Angry Birds Toy Upgrade Schedule of the project and log of work done DOCUMENT INFORMATION Subject: Authors:, Keywords: Comments: Creation date: 10 December 2012 Revision date: 02/21/13 Print
Introduction to Microcontroller Apps for Amateur Radio Projects Using the HamStack Platform.
 Introduction to Microcontroller Apps for Amateur Radio Projects Using the HamStack Platform www.sierraradio.net www.hamstack.com Topics Introduction Hardware options Software development HamStack project
Introduction to Microcontroller Apps for Amateur Radio Projects Using the HamStack Platform www.sierraradio.net www.hamstack.com Topics Introduction Hardware options Software development HamStack project
Sanguino TSB. Introduction: Features:
 Sanguino TSB Introduction: Atmega644 is being used as CNC machine driver for a while. In 2012, Kristian Sloth Lauszus from Denmark developed a hardware add-on of Atmega644 for the popular Arduino IDE and
Sanguino TSB Introduction: Atmega644 is being used as CNC machine driver for a while. In 2012, Kristian Sloth Lauszus from Denmark developed a hardware add-on of Atmega644 for the popular Arduino IDE and
Freeduino USB 1.0. Arduino Compatible Development Board Starter Guide. 1. Overview
 Freeduino USB 1.0 Arduino Compatible Development Board Starter Guide 1. Overview 1 Arduino is an open source embedded development platform consisting of a simple development board based on Atmel s AVR
Freeduino USB 1.0 Arduino Compatible Development Board Starter Guide 1. Overview 1 Arduino is an open source embedded development platform consisting of a simple development board based on Atmel s AVR
The industrial technology is rapidly moving towards ARM based solutions. Keeping this in mind, we are providing a Embedded ARM Training Suite.
 EMBEDDED ARM TRAINING SUITE ARM SUITE INCLUDES ARM 7 TRAINER KIT COMPILER AND DEBUGGER THROUGH JTAG INTERFACE PROJECT DEVELOPMENT SOLUTION FOR ARM 7 e-linux LAB FOR ARM 9 TRAINING PROGRAM INTRODUCTION
EMBEDDED ARM TRAINING SUITE ARM SUITE INCLUDES ARM 7 TRAINER KIT COMPILER AND DEBUGGER THROUGH JTAG INTERFACE PROJECT DEVELOPMENT SOLUTION FOR ARM 7 e-linux LAB FOR ARM 9 TRAINING PROGRAM INTRODUCTION
Cookie User Manual. For NuMicro Edition 1.0. Rev. 1.0 Release: forum.coocox.org.
 Cookie User Manual For NuMicro Edition 1.0 Rev. 1.0 Release: 2012-08-09 Website: Forum: Techinal: Market: www.coocox.org forum.coocox.org master@coocox.com market@coocox.com 1 Introduction Cookie is an
Cookie User Manual For NuMicro Edition 1.0 Rev. 1.0 Release: 2012-08-09 Website: Forum: Techinal: Market: www.coocox.org forum.coocox.org master@coocox.com market@coocox.com 1 Introduction Cookie is an
Fire Bird V Insect - Nex Robotics
 Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
Servosila Robotic Heads
 Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Servosila Robotic Heads www.servosila.com TABLE OF CONTENTS SERVOSILA ROBOTIC HEADS 2 SOFTWARE-DEFINED FUNCTIONS OF THE ROBOTIC HEADS 2 SPECIFICATIONS: ROBOTIC HEADS 4 DIMENSIONS OF ROBOTIC HEAD 5 DIMENSIONS
Preliminary Design Report. Project Title: Human-Powered Sub. Team Name: Depth Perception
 EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 19 April 2011 Project Title: Team Name: Depth Perception Team Members: Name: Jared Korn Email: ex.malfunction@gmail.com
EEL 4924 Electrical Engineering Design (Senior Design) Preliminary Design Report 19 April 2011 Project Title: Team Name: Depth Perception Team Members: Name: Jared Korn Email: ex.malfunction@gmail.com
Wireless Sensor Networks. FireFly 2.2 Datasheet
 2.2 Datasheet July 6, 2010 This page intentionally left blank. Contents 1. INTRODUCTION...1 Features...1 Applications...2 2. BLOCK DIAGRAM...3 3. HARDWARE CONNECTIONS...4 Power...5 Header 1 ( UARTS, I2C,
2.2 Datasheet July 6, 2010 This page intentionally left blank. Contents 1. INTRODUCTION...1 Features...1 Applications...2 2. BLOCK DIAGRAM...3 3. HARDWARE CONNECTIONS...4 Power...5 Header 1 ( UARTS, I2C,
3.3V regulator. JA H-bridge. Doc: page 1 of 7
 Digilent Cerebot Board Reference Manual Revision: 11/17/2005 www.digilentinc.com 215 E Main Suite D Pullman, WA 99163 (509) 334 6306 Voice and Fax Overview The Digilent Cerebot Board is a useful tool for
Digilent Cerebot Board Reference Manual Revision: 11/17/2005 www.digilentinc.com 215 E Main Suite D Pullman, WA 99163 (509) 334 6306 Voice and Fax Overview The Digilent Cerebot Board is a useful tool for
ASV 2008 Son of a Boatname. Group 1 Michael Podel Gor Beglaryan Kiran Bernard Christina Sylvia
 ASV 2008 Son of a Boatname Group 1 Michael Podel Gor Beglaryan Kiran Bernard Christina Sylvia ASV 2009 SS Boatname ASV 2010 Boatname the Brave Autonomous Surface Vehicle Robotics Club at UCF AUVSI and
ASV 2008 Son of a Boatname Group 1 Michael Podel Gor Beglaryan Kiran Bernard Christina Sylvia ASV 2009 SS Boatname ASV 2010 Boatname the Brave Autonomous Surface Vehicle Robotics Club at UCF AUVSI and
GUIDE TO SP STARTER SHIELD (V3.0)
") OVERVIEW: The SP Starter shield provides a complete learning platform for beginners and newbies. The board is equipped with loads of sensors and components like relays, user button, LED, IR Remote and
OVERVIEW: The SP Starter shield provides a complete learning platform for beginners and newbies. The board is equipped with loads of sensors and components like relays, user button, LED, IR Remote and
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with 8051 µc INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic
Software Development & Education Center Embedded Robotics Robotics Development with 8051 µc INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic
AVR Intermediate Development Board. Product Manual. Contents. 1) Overview 2) Features 3) Using the board 4) Troubleshooting and getting help
 Overview 2) Features 3) Using the board 4) Troubleshooting and getting help") AVR Intermediate Development Board Product Manual Contents 1) Overview 2) Features 3) Using the board 4) Troubleshooting and getting help 1. Overview 2. Features The board is built on a high quality FR-4(1.6
AVR Intermediate Development Board Product Manual Contents 1) Overview 2) Features 3) Using the board 4) Troubleshooting and getting help 1. Overview 2. Features The board is built on a high quality FR-4(1.6
Advance Robotics with Embedded System Design (ARESD)
") Advance Robotics with Embedded System Design (ARESD) LEARN HOW TO: Use Arduino hardware &Arduino programming for microcontroller based hobby project development Use WinAVRcross compiler formicrocontroller
Advance Robotics with Embedded System Design (ARESD) LEARN HOW TO: Use Arduino hardware &Arduino programming for microcontroller based hobby project development Use WinAVRcross compiler formicrocontroller
ARDUINO BOARD LINE UP
 Technical Specifications Pinout Diagrams Technical Comparison Board Name Processor Operating/Input Voltage CPU Speed Analog In/Out Digital IO/PWM USB UART 101 Intel Curie 3.3 V/ 7-12V 32MHz 6/0 14/4 Regular
Technical Specifications Pinout Diagrams Technical Comparison Board Name Processor Operating/Input Voltage CPU Speed Analog In/Out Digital IO/PWM USB UART 101 Intel Curie 3.3 V/ 7-12V 32MHz 6/0 14/4 Regular
Wall-Follower. Xiaodong Fang. EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering
 Wall-Follower Xiaodong Fang EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering TAs: Tim Martin Josh Weaver Instructors: Dr. A. Antonio Arroyo
Wall-Follower Xiaodong Fang EEL5666 Intelligent Machines Design Laboratory University of Florida School of Electrical and Computer Engineering TAs: Tim Martin Josh Weaver Instructors: Dr. A. Antonio Arroyo
HEXIWEAR COMPLETE IOT DEVELOPMENT SOLUTION
 HEXIWEAR COMPLETE IOT DEVELOPMENT SOLUTION NXP SEMICONDUCTORS PUBLIC THE ONLY SUPPLIER TO PROVIDE COMPLETE IoT SOLUTIONS DSPs, MCUs & CPUs Suite of Sensors NFC, BLE, Thread, zigbee, sub-ghz Wireless Interconnects
HEXIWEAR COMPLETE IOT DEVELOPMENT SOLUTION NXP SEMICONDUCTORS PUBLIC THE ONLY SUPPLIER TO PROVIDE COMPLETE IoT SOLUTIONS DSPs, MCUs & CPUs Suite of Sensors NFC, BLE, Thread, zigbee, sub-ghz Wireless Interconnects
AC : INFRARED COMMUNICATIONS FOR CONTROLLING A ROBOT
 AC 2007-1527: INFRARED COMMUNICATIONS FOR CONTROLLING A ROBOT Ahad Nasab, Middle Tennessee State University SANTOSH KAPARTHI, Middle Tennessee State University American Society for Engineering Education,
AC 2007-1527: INFRARED COMMUNICATIONS FOR CONTROLLING A ROBOT Ahad Nasab, Middle Tennessee State University SANTOSH KAPARTHI, Middle Tennessee State University American Society for Engineering Education,
Electronic Design for Power Control Technology and Knowledge transferred from University to Industry
 CITCEA-UPC Electronic Design for Power Control www.citcea.upc.edu Technology and Knowledge transferred from University to Industry 1 CITCEA-UPC is a centre for research and technology innovation born in
CITCEA-UPC Electronic Design for Power Control www.citcea.upc.edu Technology and Knowledge transferred from University to Industry 1 CITCEA-UPC is a centre for research and technology innovation born in
Pridgen Vermeer Robotics ATmega128 Revision 0
 Features: 6x 8-bit I/O Ports 4x A/D Inputs 6x PWM Headers 2x RS 232 Terminals Power Bus LCD Header (4-bit mode) Smart Power Connecter Power Switch Header Power LED Debug LED Note: Some pins have multiple
Features: 6x 8-bit I/O Ports 4x A/D Inputs 6x PWM Headers 2x RS 232 Terminals Power Bus LCD Header (4-bit mode) Smart Power Connecter Power Switch Header Power LED Debug LED Note: Some pins have multiple
Arduino Dock 2. The Hardware
 Arduino Dock 2 The Arduino Dock 2 is our supercharged version of an Arduino Uno R3 board. These two boards share the same microcontroller, the ATmel ATmega328P microcontroller (MCU), and have identical
Arduino Dock 2 The Arduino Dock 2 is our supercharged version of an Arduino Uno R3 board. These two boards share the same microcontroller, the ATmel ATmega328P microcontroller (MCU), and have identical
Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
AVR 40 Pin Rapid Robot controller board
 AVR 40 Pin Rapid Robot controller board User Manual Robokits India http://www.robokits.org info@robokits.org - 1 - Thank you for purchasing the AVR 40 Pin Rapid Robot controller board. This unit has been
AVR 40 Pin Rapid Robot controller board User Manual Robokits India http://www.robokits.org info@robokits.org - 1 - Thank you for purchasing the AVR 40 Pin Rapid Robot controller board. This unit has been
keyestudio Keyestudio MEGA 2560 R3 Board
 Keyestudio MEGA 2560 R3 Board Introduction: Keyestudio Mega 2560 R3 is a microcontroller board based on the ATMEGA2560-16AU, fully compatible with ARDUINO MEGA 2560 REV3. It has 54 digital input/output
Keyestudio MEGA 2560 R3 Board Introduction: Keyestudio Mega 2560 R3 is a microcontroller board based on the ATMEGA2560-16AU, fully compatible with ARDUINO MEGA 2560 REV3. It has 54 digital input/output
Module 1. Introduction. Version 2 EE IIT, Kharagpur 1
 Module 1 Introduction Version 2 EE IIT, Kharagpur 1 Lesson 3 Embedded Systems Components Part I Version 2 EE IIT, Kharagpur 2 Structural Layout with Example Instructional Objectives After going through
Module 1 Introduction Version 2 EE IIT, Kharagpur 1 Lesson 3 Embedded Systems Components Part I Version 2 EE IIT, Kharagpur 2 Structural Layout with Example Instructional Objectives After going through
CORRIGENDUM ISSUED FOR NATIONAL COMPETITIVE BIDDING UNDER TEQIP PHASE-II
 CORRIGENDUM ISSUED FOR NATIONAL COMPETITIVE BIDDING UNDER TEQIP PHASE-II The prebid meeting for the packages to be purchased under national competitive bidding for TEQIP Phase II was held on 15/10/2013
CORRIGENDUM ISSUED FOR NATIONAL COMPETITIVE BIDDING UNDER TEQIP PHASE-II The prebid meeting for the packages to be purchased under national competitive bidding for TEQIP Phase II was held on 15/10/2013
Robotic Systems ECE 401RB Fall 2006
 The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 15: Processors Part 3 Chapter 14, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Peripherals
The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 15: Processors Part 3 Chapter 14, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Peripherals
CEIBO FE-51RD2 Development System
 CEIBO FE-51RD2 Development System Development System for Atmel AT89C51RD2 Microcontrollers FEATURES Emulates Atmel AT89C51RD2 60K Code Memory Real-Time Emulation Frequency up to 40MHz / 3V, 5V ISP and
CEIBO FE-51RD2 Development System Development System for Atmel AT89C51RD2 Microcontrollers FEATURES Emulates Atmel AT89C51RD2 60K Code Memory Real-Time Emulation Frequency up to 40MHz / 3V, 5V ISP and
Product Overview -A 16 bit Micro Experimenter for Solderless Breadboards
 Product Overview -A 16 bit Micro Experimenter for Solderless Breadboards 1.0 Introduction The 16 Bit Micro Experimenter is an innovative solderless breadboard kit solution developed by a Microchip Academic
Product Overview -A 16 bit Micro Experimenter for Solderless Breadboards 1.0 Introduction The 16 Bit Micro Experimenter is an innovative solderless breadboard kit solution developed by a Microchip Academic
This is an inspection failure, not meeting the requirement of >10k Ohm between either PD battery post and chassis.
 Troubleshooting This is a document put together by CSA Laura Rhodes that contains a lot of information about troubleshooting steps for a lot of common control system problems encountered at events. No
Troubleshooting This is a document put together by CSA Laura Rhodes that contains a lot of information about troubleshooting steps for a lot of common control system problems encountered at events. No
Homework 6: Printed Circuit Board Layout Design Narrative Due: Friday, February 27, at NOON
 Homework 6: Printed Circuit Board Layout Design Narrative Due: Friday, February 27, at NOON Team Code Name: _Magic Wand Group No. 5 Team Member Completing This Homework: Michelle Zhang E-mail Address of
Homework 6: Printed Circuit Board Layout Design Narrative Due: Friday, February 27, at NOON Team Code Name: _Magic Wand Group No. 5 Team Member Completing This Homework: Michelle Zhang E-mail Address of
solutions for teaching and learning
 RKP18Motor Component List and Instructions PCB layout Constructed PCB Schematic Diagram RKP18Motor Project PCB Page 1 Description The RKP18Motor project PCB has been designed to use PIC microcontrollers
RKP18Motor Component List and Instructions PCB layout Constructed PCB Schematic Diagram RKP18Motor Project PCB Page 1 Description The RKP18Motor project PCB has been designed to use PIC microcontrollers
acknowledgments...xiii foreword...xiv
 Contents in Detail acknowledgments...xiii foreword...xiv Introduction... xv Why Build and Learn About Robots?...xvi Why the Raspberry Pi?... xvii What Is in This Book?... xvii Who is This Book For?...xix
Contents in Detail acknowledgments...xiii foreword...xiv Introduction... xv Why Build and Learn About Robots?...xvi Why the Raspberry Pi?... xvii What Is in This Book?... xvii Who is This Book For?...xix
Home Automation using IoT
 International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 6 (2017) pp. 939-944 Research India Publications http://www.ripublication.com Home Automation using IoT Dr. A.
International Journal of Electronics Engineering Research. ISSN 0975-6450 Volume 9, Number 6 (2017) pp. 939-944 Research India Publications http://www.ripublication.com Home Automation using IoT Dr. A.
Dual-POB. View Full-Size Image View Full-Size Image. ( POB-Technology ) ( POB-Technology ) Description
 ( POB-Technology ) Description") View Full-Size Image View Full-Size Image Dual-POB ( POB-Technology ) ( POB-Technology ) Description The Dual-POB is a board that allows you to easily create your robot with many kinds of things that are
View Full-Size Image View Full-Size Image Dual-POB ( POB-Technology ) ( POB-Technology ) Description The Dual-POB is a board that allows you to easily create your robot with many kinds of things that are
EK307 Lab: Microcontrollers
 EK307 Lab: Microcontrollers Laboratory Goal: Program a microcontroller to perform a variety of digital tasks. Learning Objectives: Learn how to program and use the Atmega 323 microcontroller Suggested
EK307 Lab: Microcontrollers Laboratory Goal: Program a microcontroller to perform a variety of digital tasks. Learning Objectives: Learn how to program and use the Atmega 323 microcontroller Suggested
ATmega32U4 IoT Weather Station
 ATmega32U4 IoT Weather Station TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special
ATmega32U4 IoT Weather Station TM Gumstix, Inc. shall have no liability of any kind, express or implied, arising out of the use of the Information in this document, including direct, indirect, special
Homework 5: Theory of Operation and Hardware Design Narrative
 ECE 477 Digital Systems Senior Design Project Rev 9/12 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: Hackers of Catron Group No. 03 Team Member Completing This Homework:
ECE 477 Digital Systems Senior Design Project Rev 9/12 Homework 5: Theory of Operation and Hardware Design Narrative Team Code Name: Hackers of Catron Group No. 03 Team Member Completing This Homework:
MT2 Introduction Embedded Systems. MT2.1 Mechatronic systems
 MT2 Introduction Embedded Systems MT2.1 Mechatronic systems Mechatronics is the synergistic integration of mechanical engineering, with electronics and intelligent computer control in the design and manufacturing
MT2 Introduction Embedded Systems MT2.1 Mechatronic systems Mechatronics is the synergistic integration of mechanical engineering, with electronics and intelligent computer control in the design and manufacturing
Overview The Microcontroller The Flex Board Expansion boards Multibus board Demo board How to: Compile demo Flash & Run Demos
 RETIS Lab Real-Time Systems Laboratory FLEX Developement Environment Mauro Marinoni [nino@evidence.eu.com [ nino@evidence.eu.com] ] Overview The Microcontroller The Flex Board Expansion boards Multibus
RETIS Lab Real-Time Systems Laboratory FLEX Developement Environment Mauro Marinoni [nino@evidence.eu.com [ nino@evidence.eu.com] ] Overview The Microcontroller The Flex Board Expansion boards Multibus
Freedom FRDM-KV31F Development Platform User s Guide
 Freescale Semiconductor, Inc. Document Number: FRDMKV31FUG User's Guide 0, 02/2016 Freedom FRDM-KV31F Development Platform User s Guide 1. Introduction The Freedom development platform is a set of software
Freescale Semiconductor, Inc. Document Number: FRDMKV31FUG User's Guide 0, 02/2016 Freedom FRDM-KV31F Development Platform User s Guide 1. Introduction The Freedom development platform is a set of software
CanSat Project Supervisor: Adam Cseh 0931/ Robotics Hall / Office 4
 CanSat Project 2008 Supervisor: Adam Cseh cseh@informatik.uni-wuerzburg.de 0931/888 6754 Robotics Hall / Office 4 Overview/Goals CanSat: Satellite in a Can. A device which can perform scientific experiments
CanSat Project 2008 Supervisor: Adam Cseh cseh@informatik.uni-wuerzburg.de 0931/888 6754 Robotics Hall / Office 4 Overview/Goals CanSat: Satellite in a Can. A device which can perform scientific experiments
MYD-SAMA5D3X Development Board
 MYD-SAMA5D3X Development Board MYC-SAMA5D3X CPU Module as Controller Board DDR2 SO-DIMM 200-pin Signals Consistent with Atmel's Official Board 536MHz Atmel SAMA5D3 Series ARM Cortex-A5 Processors 512MB
MYD-SAMA5D3X Development Board MYC-SAMA5D3X CPU Module as Controller Board DDR2 SO-DIMM 200-pin Signals Consistent with Atmel's Official Board 536MHz Atmel SAMA5D3 Series ARM Cortex-A5 Processors 512MB
WIFI ENABLED SMART ROBOT
 WIFI ENABLED SMART ROBOT Shashank U Moro School of Mechanical and Building Science, VIT University, Vellore-632014, TamilNadu, India moroshash@gmail.com; +91-9597428287 Abstract: The field of robotics
WIFI ENABLED SMART ROBOT Shashank U Moro School of Mechanical and Building Science, VIT University, Vellore-632014, TamilNadu, India moroshash@gmail.com; +91-9597428287 Abstract: The field of robotics
OBSTACLE DETECTION WITH BLUETOOTH CONTROLLED VEHICLE MOTION
 PROJECT REPORT ON OBSTACLE DETECTION WITH BLUETOOTH CONTROLLED VEHICLE MOTION BY Sasank Das Alladi Naga Aiswarya Vadlamani Priyadarsini Pethanaraj Rohit Chaitanya Kunkumagunta ECE 511: MICROPROCESSORS
PROJECT REPORT ON OBSTACLE DETECTION WITH BLUETOOTH CONTROLLED VEHICLE MOTION BY Sasank Das Alladi Naga Aiswarya Vadlamani Priyadarsini Pethanaraj Rohit Chaitanya Kunkumagunta ECE 511: MICROPROCESSORS
PAC5523EVK1. Power Application Controllers. PAC5523EVK1 User s Guide. Copyright 2017 Active-Semi, Inc.
 PAC5523EVK1 Power Application Controllers PAC5523EVK1 User s Guide www.active-semi.com Copyright 2017 Active-Semi, Inc. CONTENTS Contents...2 Overview...3 PAC5523EVK1 Resources...5 Pinout and Signal Connectivity...5
PAC5523EVK1 Power Application Controllers PAC5523EVK1 User s Guide www.active-semi.com Copyright 2017 Active-Semi, Inc. CONTENTS Contents...2 Overview...3 PAC5523EVK1 Resources...5 Pinout and Signal Connectivity...5
Freescale Semiconductor Inc. Microcontroller Solutions Group. FRDM-KL46Z User s Manual FRDM-KL46Z-UM Rev. 1.0
 Freescale Semiconductor Inc. Microcontroller Solutions Group FRDM-KL46Z User s Manual FRDM-KL46Z-UM Rev. 1.0 Table of Contents 1 FRDM-KL46Z Overview... 3 2 References documents... 3 3 Getting started...
Freescale Semiconductor Inc. Microcontroller Solutions Group FRDM-KL46Z User s Manual FRDM-KL46Z-UM Rev. 1.0 Table of Contents 1 FRDM-KL46Z Overview... 3 2 References documents... 3 3 Getting started...
Final Report. Project Title: Dial A Whip
 EEL 4924 Electrical Engineering Design (Senior Design) 25 April 2012 Project Title: Dial A Whip Team Members: Name: Chris Calvo Name: Daniel De Leo Project Abstract: Dial A Whip consists of a compact module
EEL 4924 Electrical Engineering Design (Senior Design) 25 April 2012 Project Title: Dial A Whip Team Members: Name: Chris Calvo Name: Daniel De Leo Project Abstract: Dial A Whip consists of a compact module
Homework 11: Reliability and Safety Analysis
 ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 11: Reliability and Safety Analysis Team Code Name: ATV Group No. _3 Team Member Completing This Homework: Sebastian Hening E-mail Address
ECE 477 Digital Systems Senior Design Project Rev 8/09 Homework 11: Reliability and Safety Analysis Team Code Name: ATV Group No. _3 Team Member Completing This Homework: Sebastian Hening E-mail Address
Basic Components of Digital Computer
 Digital Integrated Circuits & Microcontrollers Sl. Mihnea UDREA, mihnea@comm.pub.ro Conf. Mihai i STANCIU, ms@elcom.pub.ro 1 Basic Components of Digital Computer CPU (Central Processing Unit) Control and
Digital Integrated Circuits & Microcontrollers Sl. Mihnea UDREA, mihnea@comm.pub.ro Conf. Mihai i STANCIU, ms@elcom.pub.ro 1 Basic Components of Digital Computer CPU (Central Processing Unit) Control and
Getting to know the Arduino IDE
 Getting to know the Arduino IDE I ve heard about Arduino, what the heck is it? Arduino is a development environment Combination of hardware and software Hardware based on Atmel AVR processors Software
Getting to know the Arduino IDE I ve heard about Arduino, what the heck is it? Arduino is a development environment Combination of hardware and software Hardware based on Atmel AVR processors Software
Control System Consideration of IR Sensors based Tricycle Drive Wheeled Mobile Robot
 Control System Consideration of IR Sensors based Tricycle Drive Wheeled Mobile Robot Aye Aye New, Aye Aye Zan, and Wai Phyo Aung Abstract Nowadays, Wheeled Mobile Robots (WMRs) are built and the control
Control System Consideration of IR Sensors based Tricycle Drive Wheeled Mobile Robot Aye Aye New, Aye Aye Zan, and Wai Phyo Aung Abstract Nowadays, Wheeled Mobile Robots (WMRs) are built and the control
Husarion CORE2. Husarion CORE2 is a development board for Internet-connected automation & robotic devices.
 Husarion CORE2 Husarion CORE2 is a development board for Internet-connected automation & robotic devices. CORE2 Development board for Internet connected automation & robotic devices. compatible with Husarion
Husarion CORE2 Husarion CORE2 is a development board for Internet-connected automation & robotic devices. CORE2 Development board for Internet connected automation & robotic devices. compatible with Husarion
Mobile Autonomous Robotic Sentry (MARS) with Facial Detection and Recognition
 with Facial Detection and Recognition") Mobile Autonomous Robotic Sentry (MARS) with Facial Detection and Recognition Tyler M. Lovelly University of Florida, Dept. of Electrical & Computer Engineering 12315 Clarendon Ct Spring Hill, FL 34609
Mobile Autonomous Robotic Sentry (MARS) with Facial Detection and Recognition Tyler M. Lovelly University of Florida, Dept. of Electrical & Computer Engineering 12315 Clarendon Ct Spring Hill, FL 34609
Low-Cost Autonomous Multi-Robot Network
 Indiana University Purdue University Fort Wayne Opus: Research & Creativity at IPFW Engineering Senior Design Projects School of Engineering, Technology and Computer Science Design Projects 5-3-2012 Low-Cost
Indiana University Purdue University Fort Wayne Opus: Research & Creativity at IPFW Engineering Senior Design Projects School of Engineering, Technology and Computer Science Design Projects 5-3-2012 Low-Cost
Ali Karimpour Associate Professor Ferdowsi University of Mashhad
 AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
AUTOMATIC CONTROL SYSTEMS Ali Karimpour Associate Professor Ferdowsi University of Mashhad Main reference: Christopher T. Kilian, (2001), Modern Control Technology: Components and Systems Publisher: Delmar
Arduino Smart Robot Car Kit User Guide
 User Guide V1.0 04.2017 UCTRONIC Table of Contents 1. Introduction...3 2. Assembly...4 2.1 Arduino Uno R3...4 2.2 HC-SR04 Ultrasonic Sensor Module with Bracket / Holder...5 2.3 L293D Motor Drive Expansion
User Guide V1.0 04.2017 UCTRONIC Table of Contents 1. Introduction...3 2. Assembly...4 2.1 Arduino Uno R3...4 2.2 HC-SR04 Ultrasonic Sensor Module with Bracket / Holder...5 2.3 L293D Motor Drive Expansion
EZ-Bv4 Datasheet v0.7
 EZ-Bv4 Datasheet v0.7 Table of Contents Introduction... 2 Electrical Characteristics... 3 Regulated and Unregulated Power Pins... 4 Low Battery Warning... 4 Hardware Features Main CPU... 5 Fuse Protection...
EZ-Bv4 Datasheet v0.7 Table of Contents Introduction... 2 Electrical Characteristics... 3 Regulated and Unregulated Power Pins... 4 Low Battery Warning... 4 Hardware Features Main CPU... 5 Fuse Protection...
Garage Door Opener based on Image Processing. Adviser Ahmed Almelhem By Mohammed Bashmmakh
 Garage Door Opener based on Image Processing Adviser Ahmed Almelhem By Mohammed Bashmmakh Outline Introduction Problem Statment System requirement System Design Testing and Evaluation Engineering Tools
Garage Door Opener based on Image Processing Adviser Ahmed Almelhem By Mohammed Bashmmakh Outline Introduction Problem Statment System requirement System Design Testing and Evaluation Engineering Tools
Modules For Six Months Industrial Training On WIRELESS EMBEDDED SYSTEM DESIGN
 Modules For Six Months Industrial Training On WIRELESS EMBEDDED SYSTEM DESIGN 1 st Week Introduction to Embedded System a) Tool Hardware tool and Software tool b) Embedded designing, course study c) Board
Modules For Six Months Industrial Training On WIRELESS EMBEDDED SYSTEM DESIGN 1 st Week Introduction to Embedded System a) Tool Hardware tool and Software tool b) Embedded designing, course study c) Board
8051 Intermidiate Development Board. Product Manual. Contents. 1) Overview 2) Features 3) Using the board 4) Troubleshooting and getting help
 Overview 2) Features 3) Using the board 4) Troubleshooting and getting help") 8051 Intermidiate Development Board Product Manual Contents 1) Overview 2) Features 3) Using the board 4) Troubleshooting and getting help 1. Overview 2. Features The board is built on a high quality FR-4(1.6
8051 Intermidiate Development Board Product Manual Contents 1) Overview 2) Features 3) Using the board 4) Troubleshooting and getting help 1. Overview 2. Features The board is built on a high quality FR-4(1.6
Pridgen Vermeer Robotics Xmega128 Manual
 Features: 12x PWM signals with 5V supply 8x A/D Inputs with 3.3V supply 2x RS 232 Terminals 1x SPI Interface 4x 8-bit Digital IO ports 3.3V Power Bus LCD Header (4-bit mode) Smart Power Connecter Power
Features: 12x PWM signals with 5V supply 8x A/D Inputs with 3.3V supply 2x RS 232 Terminals 1x SPI Interface 4x 8-bit Digital IO ports 3.3V Power Bus LCD Header (4-bit mode) Smart Power Connecter Power
IDUINO for maker s life. User Manual. For IDUINO development Board.
 User Manual For IDUINO development Board 1.Overview 1.1 what is Arduino? Arduino is an open-source prototyping platform based on easy-to-use hardware and software. Arduino boards are able to read inputs
User Manual For IDUINO development Board 1.Overview 1.1 what is Arduino? Arduino is an open-source prototyping platform based on easy-to-use hardware and software. Arduino boards are able to read inputs
ARDUINO LEONARDO ETH Code: A000022
 ARDUINO LEONARDO ETH Code: A000022 All the fun of a Leonardo, plus an Ethernet port to extend your project to the IoT world. You can control sensors and actuators via the internet as a client or server.
ARDUINO LEONARDO ETH Code: A000022 All the fun of a Leonardo, plus an Ethernet port to extend your project to the IoT world. You can control sensors and actuators via the internet as a client or server.