UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES. 8 th April 2010 Phang Swee King
|
|
|
- Sheena White
- 5 years ago
- Views:
Transcription
1 UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES 8 th April 2010 Phang Swee King
2 OUTLINES Introduction Platform Design Helicopter Avionics System Ground Station Sensors Measurement Improvement Control Methodology Orientation and Position Track Navigation Flight Tests and Results Future Improvements Summary

3 INTRODUCTION


4 PROJECT INTRODUCTION Project Aims Develop a universal control methodology which can be universally applied to unmanned vehicles Motivations Minimize difficulty for control law design and implementation in the future.


5 UNMANNED VEHICLE TYPES Unmanned Ground Vehicles Unmanned Aerial Vehicles Remote observation of hazardous environment Military applications Police forces Unmanned Underwater Vehicles



6 UAV TYPES Ability of Vertical Take-off and Landing (VTOL) Able to hover More challenging control problem as it is unstable in nature Fixed Wing UAV Rotorcraft UAV Airship UAV
7 ROTORCRAFT UAV TYPES Single Rotor UAV Co-axial UAV Simpler Dynamic Smaller in size but higher takeoff weight Stabilizer bar as passive controller. Multi-rotor UAV
8 TASKS Navigation following colored track Enter a doorway Identify objects Height reference changes Automatic landing

9 PLATFORM DESIGN



10 HELICOPTER Esky Brushless Motor 3900KV Metal Shaft and Swashplate ESky Big Lama Co-axial Helicopter 3DPro Hard DuraBlade

11 AVIONICS SYSTEM 3 main groups Processors Sensors Wireless Communication Module
12 AVIONICS COMPONENTS PROCESSORS Gumstix Verdex Pro 600MHz processing speed Light weight, small size Gumstix Overo 600MHz processing speed Light weight, small size
13 AVIONICS COMPONENTS SENSORS MNAV100CA Including 3 accelerometers, 3 gyroscopes, 3 magnetometer, and GPS receiver Integrated with servo controller MaxSonar EZ4 Up to 6 meter range Light weight, small size Hp Pavillion DV5 built in Camera 2 megapixel resolution Light weight
14 AVIONICS COMPONENTS MODEMS XBee-Pro Indoor range: 100 meter Light weight, small size
15 SOLIDWORKS DESIGN Individual SolidWorks objects are drawn to scale

16 SOLIDWORKS DESIGN Centre of Gravity

17 SOLIDWORKS DESIGN SolidWorks design Real implementation
18 FINAL SPECIFICATIONS Rotors diameter 480 millimeters Weight 770 grams Takeoff weight ~1000 grams Motors Brushless 3900kV Voltage supply 11.1 V


19 GROUND STATION Run in Linux Ubuntu Two separate programs Camera view Console

20 SENSORS MEASUREMENT IMPROVEMENT
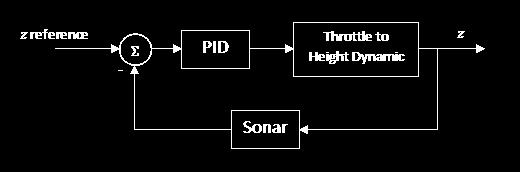
21 HEIGHT MEASUREMENT Spikes might occurs at rough surface Algorithm if abs{ dh } > 1 meter measured height = not valid else measured height = valid end if LPF h 1 h 0.2s + 1
22 TILT COMPENSATORS Tilting of the UAV affects the actual measurements h act h = mea tan θ + tan 2 φ d act = d mea h act tanφ
23 ACCURACY TESTS Orientation measurements Position measurements
24 CONTROL METHODOLOGY
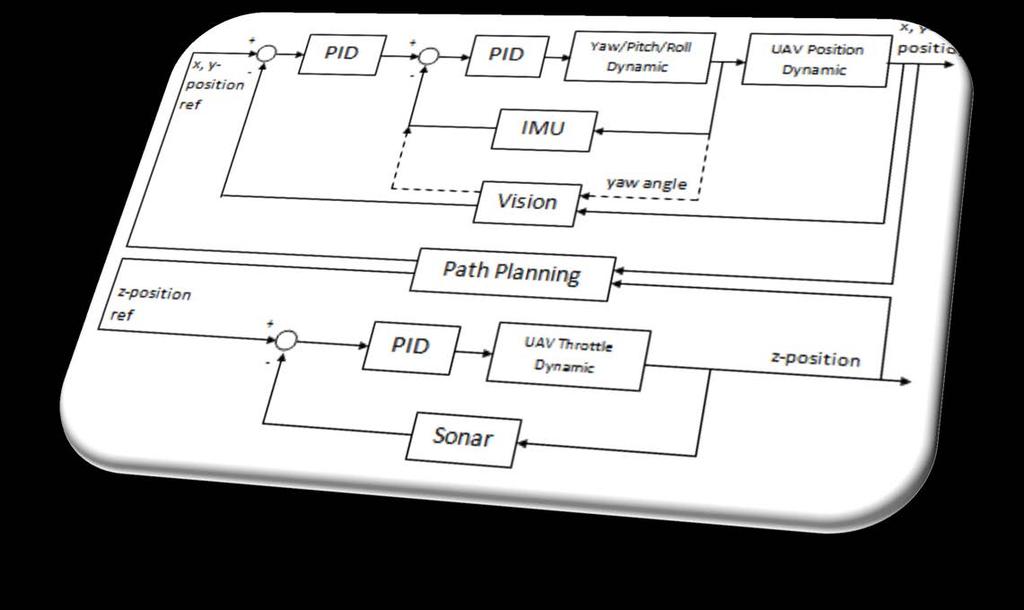
25 ORIENTATION CONTROL Pitch/Roll angle Yaw angle

26 POSITION CONTROL y-position z-position

27 TRACK NAVIGATION ), ( atan y y x x A A A A = θ Heading angle reference y-position reference θ sinθ 2 cos = y y x x d A A A A

28 FLIGHT TESTS AND RESULTS

29 FLIGHT PATH
30 FLIGHT TEST VIDEO
31 ORIENTATION AND HEIGHT PLOTS Height log Orientation log

32 OBJECTS IDENTIFICATION Rectangle box Paper cutter Measuring tape

33 FUTURE IMPROVEMENTS
34 FUTURE IMPROVEMENTS Better sensors Laser range finder Air speed sensor Obstacles detection More robust controller
35 SUMMARY
36 SUMMARY Introduction Why Co-axial helicopter Platform Design Helicopter Avionics system Processors Sensors Modems Ground station Measurement Improvements Height Lateral position Control Methodology Orientation and position Track navigation Flight Tests and Results Video Graphs Future Improvements Better sensors Obstacles detection More robust controller




37 SAFMC 2010
38 Thank You
Autonomous Mini-UAV for Indoor Flight with Embedded On-board Vision Processing as Navigation System
 722 IEEE Region 8 SIBIRCON-2010, Irkutsk Listvyanka, Russia, July 11 15, 2010 Autonomous Mini-UAV for Indoor Flight with Embedded On-board Vision Processing as Navigation System Swee King Phang, Jun Jie
722 IEEE Region 8 SIBIRCON-2010, Irkutsk Listvyanka, Russia, July 11 15, 2010 Autonomous Mini-UAV for Indoor Flight with Embedded On-board Vision Processing as Navigation System Swee King Phang, Jun Jie
EE4001: Final Year Project Continuous Assessment 1
 EE4001: Final Year Project Continuous Assessment 1 Universal Control Methodology Design and Implementation for Unmanned Vehicles Phang Swee King 24 th September 2009 Outlines Introduction Goal of the Project
EE4001: Final Year Project Continuous Assessment 1 Universal Control Methodology Design and Implementation for Unmanned Vehicles Phang Swee King 24 th September 2009 Outlines Introduction Goal of the Project
Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle
 Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle K. Senthil Kumar, Mohammad Rasheed, and T.Anand Abstract Helicopter offers the capability of hover, slow forward movement, vertical take-off
Design and Development of Unmanned Tilt T-Tri Rotor Aerial Vehicle K. Senthil Kumar, Mohammad Rasheed, and T.Anand Abstract Helicopter offers the capability of hover, slow forward movement, vertical take-off
A Control System for an Unmanned Micro Aerial Vehicle
 15th International Conference on Mechatronics Technology A Control System for an Unmanned Micro Aerial Vehicle L. Huang 1 and C. Murton 2 1 School of Engineering, Auckland University of Technology, New
15th International Conference on Mechatronics Technology A Control System for an Unmanned Micro Aerial Vehicle L. Huang 1 and C. Murton 2 1 School of Engineering, Auckland University of Technology, New
Construction, Modeling and Automatic Control of a UAV Helicopter
 Construction, Modeling and Automatic Control of a UAV Helicopter BEN M. CHENHEN EN M. C Department of Electrical and Computer Engineering National University of Singapore 1 Outline of This Presentation
Construction, Modeling and Automatic Control of a UAV Helicopter BEN M. CHENHEN EN M. C Department of Electrical and Computer Engineering National University of Singapore 1 Outline of This Presentation
IMPROVING QUADROTOR 3-AXES STABILIZATION RESULTS USING EMPIRICAL RESULTS AND SYSTEM IDENTIFICATION
 IMPROVING QUADROTOR 3-AXES STABILIZATION RESULTS USING EMPIRICAL RESULTS AND SYSTEM IDENTIFICATION Övünç Elbir & Electronics Eng. oelbir@etu.edu.tr Anıl Ufuk Batmaz & Electronics Eng. aubatmaz@etu.edu.tr
IMPROVING QUADROTOR 3-AXES STABILIZATION RESULTS USING EMPIRICAL RESULTS AND SYSTEM IDENTIFICATION Övünç Elbir & Electronics Eng. oelbir@etu.edu.tr Anıl Ufuk Batmaz & Electronics Eng. aubatmaz@etu.edu.tr
CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH SPINNING-MASS MECHANICAL GYROSCOPES
 8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING 19-21 April 2012, Tallinn, Estonia CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH SPINNING-MASS MECHANICAL GYROSCOPES Tiimus, K. & Tamre, M.
8th International DAAAM Baltic Conference "INDUSTRIAL ENGINEERING 19-21 April 2012, Tallinn, Estonia CAMERA GIMBAL PERFORMANCE IMPROVEMENT WITH SPINNING-MASS MECHANICAL GYROSCOPES Tiimus, K. & Tamre, M.
Unmanned Aerial Vehicles
 Unmanned Aerial Vehicles Embedded Control Edited by Rogelio Lozano WILEY Table of Contents Chapter 1. Aerodynamic Configurations and Dynamic Models 1 Pedro CASTILLO and Alejandro DZUL 1.1. Aerodynamic
Unmanned Aerial Vehicles Embedded Control Edited by Rogelio Lozano WILEY Table of Contents Chapter 1. Aerodynamic Configurations and Dynamic Models 1 Pedro CASTILLO and Alejandro DZUL 1.1. Aerodynamic
Autonomous Landing of an Unmanned Aerial Vehicle
 Autonomous Landing of an Unmanned Aerial Vehicle Joel Hermansson, Andreas Gising Cybaero AB SE-581 12 Linköping, Sweden Email: {joel.hermansson, andreas.gising}@cybaero.se Martin Skoglund and Thomas B.
Autonomous Landing of an Unmanned Aerial Vehicle Joel Hermansson, Andreas Gising Cybaero AB SE-581 12 Linköping, Sweden Email: {joel.hermansson, andreas.gising}@cybaero.se Martin Skoglund and Thomas B.
Real-Time Embedded Control System for VTOL Aircrafts: Application to stabilize a quad-rotor helicopter
 Proceedings of the 26 IEEE International Conference on Control Applications Munich, Germany, October 4-6, 26 FrA9.4 Real-Time Embedded Control System for VTOL Aircrafts: Application to stabilize a quad-rotor
Proceedings of the 26 IEEE International Conference on Control Applications Munich, Germany, October 4-6, 26 FrA9.4 Real-Time Embedded Control System for VTOL Aircrafts: Application to stabilize a quad-rotor
Autonomous Indoor Hovering with a Quadrotor
 Autonomous Indoor Hovering with a Quadrotor G. Angeletti, J. R. Pereira Valente, L. Iocchi, D. Nardi Sapienza University of Rome, Dept. of Computer and System Science, Via Ariosto 25, 00185 Rome, Italy
Autonomous Indoor Hovering with a Quadrotor G. Angeletti, J. R. Pereira Valente, L. Iocchi, D. Nardi Sapienza University of Rome, Dept. of Computer and System Science, Via Ariosto 25, 00185 Rome, Italy
Outline Plan UAV with stabilized camera
 Outline Plan UAV with stabilized camera Version 1.0 Author: Therese Kjelldal Date: December 5, 2010 Status Reviewed Approved Project Identity Group E-mail: Homepage: Orderer: Customer: Course Responsible:
Outline Plan UAV with stabilized camera Version 1.0 Author: Therese Kjelldal Date: December 5, 2010 Status Reviewed Approved Project Identity Group E-mail: Homepage: Orderer: Customer: Course Responsible:
Marker Based Localization of a Quadrotor. Akshat Agarwal & Siddharth Tanwar
 Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
Marker Based Localization of a Quadrotor Akshat Agarwal & Siddharth Tanwar Objective Introduction Objective: To implement a high level control pipeline on a quadrotor which could autonomously take-off,
State Space System Modeling of a Quad Copter UAV
 Indian Journal of Science Technology, Vol 9(27), DOI: 10.17485/ijst/2016/v9i27/95239, July 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 State Space System Modeling of a Quad Copter UAV Zaid
Indian Journal of Science Technology, Vol 9(27), DOI: 10.17485/ijst/2016/v9i27/95239, July 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 State Space System Modeling of a Quad Copter UAV Zaid
Camera Drones Lecture 2 Control and Sensors
 Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
Camera Drones Lecture 2 Control and Sensors Ass.Prof. Friedrich Fraundorfer WS 2017 1 Outline Quadrotor control principles Sensors 2 Quadrotor control - Hovering Hovering means quadrotor needs to hold
ECE 477 Design Review Team 8 Spring Mike Cianciarulo, Josh Wildey, Robert Toepfer, Trent Nelson
 ECE 477 Design Review Team 8 Spring 2008 Mike Cianciarulo, Josh Wildey, Robert Toepfer, Trent Nelson Outline Project overview Project-specific success criteria Block diagram Component selection rationale
ECE 477 Design Review Team 8 Spring 2008 Mike Cianciarulo, Josh Wildey, Robert Toepfer, Trent Nelson Outline Project overview Project-specific success criteria Block diagram Component selection rationale
Design, construction and modelling of a low cost, miniature UAV using machine vision
 Design, construction and modelling of a low cost, miniature UAV using machine vision Peter Beasley s475445@student.uq.edu.au Phillip Gray s476239@student.uq.edu.au Kane Usher kane.usher@csiro.au CSIRO
Design, construction and modelling of a low cost, miniature UAV using machine vision Peter Beasley s475445@student.uq.edu.au Phillip Gray s476239@student.uq.edu.au Kane Usher kane.usher@csiro.au CSIRO
Camera gimbal control system for unmanned platforms
 8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
8 th International Symposium Topical Problems in the Field of Electrical and Power Engineering Pärnu, Estonia, January 11-16, 2010 Camera gimbal control system for unmanned platforms Kristjan Tiimus, Mart
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter
 Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
Estimation of Altitude and Vertical Velocity for Multirotor Aerial Vehicle using Kalman Filter Przemys law G asior, Stanis law Gardecki, Jaros law Gośliński and Wojciech Giernacki Poznan University of
ALGORITHMS FOR DETECTING DISORDERS OF THE BLDC MOTOR WITH DIRECT CONTROL
 Journal of KONES Powertrain and Transport, Vol. 23, No. 4 2016 ALGORITHMS FOR DETECTING DISORDERS OF THE BLDC MOTOR WITH DIRECT CONTROL Marcin Chodnicki, Przemysław Kordowski Mirosław Nowakowski, Grzegorz
Journal of KONES Powertrain and Transport, Vol. 23, No. 4 2016 ALGORITHMS FOR DETECTING DISORDERS OF THE BLDC MOTOR WITH DIRECT CONTROL Marcin Chodnicki, Przemysław Kordowski Mirosław Nowakowski, Grzegorz
Vision-aided Tracking of a Moving Ground Vehicle with a Hybrid UAV
 7 3th IEEE International Conference on Control & Automation (ICCA) July 3-6, 7. Ohrid, Macedonia Vision-aided Tracking of a Moving Ground Vehicle with a Hybrid UAV Kangli Wang, Swee King Phang, Yijie Ke,
7 3th IEEE International Conference on Control & Automation (ICCA) July 3-6, 7. Ohrid, Macedonia Vision-aided Tracking of a Moving Ground Vehicle with a Hybrid UAV Kangli Wang, Swee King Phang, Yijie Ke,
Non-symmetric membership function for Fuzzy-based visual servoing onboard a UAV
 1 Non-symmetric membership function for Fuzzy-based visual servoing onboard a UAV M. A. Olivares-Méndez and P. Campoy and C. Martínez and I. F. Mondragón B. Computer Vision Group, DISAM, Universidad Politécnica
1 Non-symmetric membership function for Fuzzy-based visual servoing onboard a UAV M. A. Olivares-Méndez and P. Campoy and C. Martínez and I. F. Mondragón B. Computer Vision Group, DISAM, Universidad Politécnica
UAV Hyperspectral system for remote sensing application
 UAV Hyperspectral system for remote sensing application The system consists airborne imaging spectrophotometer placed on a frame suitable for use aircraft, a UAV helicopter and all components needed for
UAV Hyperspectral system for remote sensing application The system consists airborne imaging spectrophotometer placed on a frame suitable for use aircraft, a UAV helicopter and all components needed for
EE5110/6110 Special Topics in Automation and Control. Autonomous Systems: Unmanned Aerial Vehicles. UAV Platform Design
 EE5110/6110 Special Topics in Automation and Control Autonomous Systems: Unmanned Aerial Vehicles UAV Platform Design Dr. Lin Feng (tsllinf@nus.edu.sg) Unmanned Systems Research Group, Dept of Electrical
EE5110/6110 Special Topics in Automation and Control Autonomous Systems: Unmanned Aerial Vehicles UAV Platform Design Dr. Lin Feng (tsllinf@nus.edu.sg) Unmanned Systems Research Group, Dept of Electrical
2008 AUVSI Student Competition Helicopter Unmanned Aircraft System
 2008 AUVSI Student Competition Helicopter Unmanned Aircraft System Authors: Robert C. DeMott II Joshua S. Grinnan Jose E. Ortiz Advisor: Dr. Robert H. Klenke Submitted: May 28, 2008 Abstract The following
2008 AUVSI Student Competition Helicopter Unmanned Aircraft System Authors: Robert C. DeMott II Joshua S. Grinnan Jose E. Ortiz Advisor: Dr. Robert H. Klenke Submitted: May 28, 2008 Abstract The following
Designing Simple Indoor Navigation System for UAVs
 19th Mediterranean Conference on Control and Automation Aquis Corfu Holiday Palace, Corfu, Greece June 2-23, 211 ThBT3.1 Designing Simple Indoor Navigation System for UAVs Mohamed Kara Mohamed, Sourav
19th Mediterranean Conference on Control and Automation Aquis Corfu Holiday Palace, Corfu, Greece June 2-23, 211 ThBT3.1 Designing Simple Indoor Navigation System for UAVs Mohamed Kara Mohamed, Sourav
Make a Quadcopter using KK Flight Controller
 Make a Quadcopter using KK 2.1.5 Flight Controller 1 Typical Applications A quadcopter, also called a quadrotor helicopter or quadrotor, is a multirotor helicopter that is lifted and propelled by four
Make a Quadcopter using KK 2.1.5 Flight Controller 1 Typical Applications A quadcopter, also called a quadrotor helicopter or quadrotor, is a multirotor helicopter that is lifted and propelled by four
Anibal Ollero Professor and head of GRVC University of Seville (Spain)
") Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
Aerial Manipulation Anibal Ollero Professor and head of GRVC University of Seville (Spain) aollero@us.es Scientific Advisor of the Center for Advanced Aerospace Technologies (Seville, Spain) aollero@catec.aero
EE565:Mobile Robotics Lecture 3
 EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
EE565:Mobile Robotics Lecture 3 Welcome Dr. Ahmad Kamal Nasir Today s Objectives Motion Models Velocity based model (Dead-Reckoning) Odometry based model (Wheel Encoders) Sensor Models Beam model of range
Epic Made Easy The Redesigned 350 QX3
 Available November 2014 350 QX3 AP Combo BLH8160 (APC) Epic Made Easy The Redesigned 350 QX3 Capturing spectacular aerial video and stills is even easier with the new Blade 350 QX3. Its simplified controls,
Available November 2014 350 QX3 AP Combo BLH8160 (APC) Epic Made Easy The Redesigned 350 QX3 Capturing spectacular aerial video and stills is even easier with the new Blade 350 QX3. Its simplified controls,
QBALL-X4 QUICK START GUIDE
 QBALL-X4 QUICK START GUIDE A STEP BY STEP GUIDE TO FLY THE QBALL-X4 UAV This is a step by step guide to fly the Qball-X4 unmanned aerial vehicle. It is highly recommended to follow this guide particularly
QBALL-X4 QUICK START GUIDE A STEP BY STEP GUIDE TO FLY THE QBALL-X4 UAV This is a step by step guide to fly the Qball-X4 unmanned aerial vehicle. It is highly recommended to follow this guide particularly
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]
![9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]](/thumbs/86/94257860.jpg "9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430]") 9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
9 Degrees of Freedom Inertial Measurement Unit with AHRS [RKI-1430] Users Manual Robokits India info@robokits.co.in http://www.robokitsworld.com Page 1 This 9 Degrees of Freedom (DOF) Inertial Measurement
EE6102 Multivariable Control Systems
 EE612 Multivariable Control Systems Homework Assignments for Part 2 Prepared by Ben M. Chen Department of Electrical & Computer Engineering National University of Singapore April 21, 212 EE612 Multivariable
EE612 Multivariable Control Systems Homework Assignments for Part 2 Prepared by Ben M. Chen Department of Electrical & Computer Engineering National University of Singapore April 21, 212 EE612 Multivariable
Learning Helicopter Model Through Examples
 Learning Helicopter Model Through Examples TITO G. AMARAL EST-Setúbal, Instituto Politécnico de Setúbal Instituto de Sistemas e Robótica UC, Pólo II Rua Vale de Chaves, Estefanilha 294-508 Setúbal PORTUGAL
Learning Helicopter Model Through Examples TITO G. AMARAL EST-Setúbal, Instituto Politécnico de Setúbal Instituto de Sistemas e Robótica UC, Pólo II Rua Vale de Chaves, Estefanilha 294-508 Setúbal PORTUGAL
Control of a quadrotor manipulating a beam (2 projects available)
") Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
Reality Modeling Drone Capture Guide
 Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Virginia Commonwealth University. Helo UAS. Helicopter Unmanned Aircraft System. Authors: Robert A.Gleich III Robert C. DeMott II James W.
 Helo UAS Helicopter Unmanned Aircraft System Authors: Robert A.Gleich III Robert C. DeMott II James W. Homan Advisor: Dr. Robert H. Klenke Submitted: 1 June 2007 Abstract This paper discusses s design
Helo UAS Helicopter Unmanned Aircraft System Authors: Robert A.Gleich III Robert C. DeMott II James W. Homan Advisor: Dr. Robert H. Klenke Submitted: 1 June 2007 Abstract This paper discusses s design
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing
 for Remote Sensing") GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
Inertial Systems. Ekinox Series TACTICAL GRADE MEMS. Motion Sensing & Navigation IMU AHRS MRU INS VG
 Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Ekinox Series TACTICAL GRADE MEMS Inertial Systems IMU AHRS MRU INS VG ITAR Free 0.05 RMS Motion Sensing & Navigation AEROSPACE GROUND MARINE Ekinox Series R&D specialists usually compromise between high
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Vision-Based Control of a Multi-Rotor Helicopter
 Vision-Based Control of a Multi-Rotor Helicopter Justin Haines CMU-RI-TR-00-00 Submitted in partial fulfillment of the requirements for the degree of Master of Science in Robotics Robotics Institute Carnegie
Vision-Based Control of a Multi-Rotor Helicopter Justin Haines CMU-RI-TR-00-00 Submitted in partial fulfillment of the requirements for the degree of Master of Science in Robotics Robotics Institute Carnegie
Quadrotor Control Using Dual Camera Visual Feedback
 Proceedings of the 3 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 3 Quadrotor Control Using Dual Camera Visual Feedback Erdinç Altuğ, James P. Ostrowski, Camillo
Proceedings of the 3 IEEE International Conference on Robotics & Automation Taipei, Taiwan, September 14-19, 3 Quadrotor Control Using Dual Camera Visual Feedback Erdinç Altuğ, James P. Ostrowski, Camillo
Autonomous Navigation in GPS Denied Indoor Environment Using RGBD Sensor, Kinect
 Autonomous Navigation in GPS Denied Indoor Environment Using RGBD Sensor, Kinect Vihari Piratla*, Suraj B Malode*, Sachin Kumar Saini*, Anurag Jakhotia Anil K Sao, Bharat Singh Rajpurohit, Genemala Haobijam
Autonomous Navigation in GPS Denied Indoor Environment Using RGBD Sensor, Kinect Vihari Piratla*, Suraj B Malode*, Sachin Kumar Saini*, Anurag Jakhotia Anil K Sao, Bharat Singh Rajpurohit, Genemala Haobijam
User s Guide. SmartAP 4. Flight Control System. SmartAP AutoPilot User s Guide. All rights reserved
 SmartAP 4 Flight Control System User s Guide All rights reserved Contents Contents... 2 Introduction... 3 Description... 3 Flight performance... 3 General... 3 Processor... 3 Sensors... 3 Interfaces...
SmartAP 4 Flight Control System User s Guide All rights reserved Contents Contents... 2 Introduction... 3 Description... 3 Flight performance... 3 General... 3 Processor... 3 Sensors... 3 Interfaces...
UAV Autonomous Navigation in a GPS-limited Urban Environment
 UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
UAV Autonomous Navigation in a GPS-limited Urban Environment Yoko Watanabe DCSD/CDIN JSO-Aerial Robotics 2014/10/02-03 Introduction 2 Global objective Development of a UAV onboard system to maintain flight
Draganflyer X6 - Base Model SKU: DF-X6-BASE-PKG
 Draganflyer X6 - Base Model SKU: DF-X6-BASE-PKG RTF Basic System With no unnecessary moving parts, the Draganflyer X6 helicopter will operate without maintenance many times longer than conventional helicopters.
Draganflyer X6 - Base Model SKU: DF-X6-BASE-PKG RTF Basic System With no unnecessary moving parts, the Draganflyer X6 helicopter will operate without maintenance many times longer than conventional helicopters.
Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application
 Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial
Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial
Mapping Road surface condition using Unmanned Aerial Vehicle- Based Imaging System. Ahmed F. Elaksher St. Cloud State University
 Mapping Road surface condition using Unmanned Aerial Vehicle- Based Imaging System Ahmed F. Elaksher St. Cloud State University 1 Outline Introduction & Motivation Methodology Experimental Results & Analysis
Mapping Road surface condition using Unmanned Aerial Vehicle- Based Imaging System Ahmed F. Elaksher St. Cloud State University 1 Outline Introduction & Motivation Methodology Experimental Results & Analysis
Critical Design Review. Almog Dov Assaf Aloush Bar Ovadia Dafna Lavi Orad Eldar. Supervisor: Dror Artzi
 Critical Design Review Almog Dov Assaf Aloush Bar Ovadia Dafna Lavi Orad Eldar Supervisor: Dror Artzi Man-portable UAV Over the hill / Urban surveillance Fast field deployment Endurance: 3 min Simple to
Critical Design Review Almog Dov Assaf Aloush Bar Ovadia Dafna Lavi Orad Eldar Supervisor: Dror Artzi Man-portable UAV Over the hill / Urban surveillance Fast field deployment Endurance: 3 min Simple to
A New Protocol of CSI For The Royal Canadian Mounted Police
 A New Protocol of CSI For The Royal Canadian Mounted Police I. Introduction The Royal Canadian Mounted Police started using Unmanned Aerial Vehicles to help them with their work on collision and crime
A New Protocol of CSI For The Royal Canadian Mounted Police I. Introduction The Royal Canadian Mounted Police started using Unmanned Aerial Vehicles to help them with their work on collision and crime
UAV Position and Attitude Sensoring in Indoor Environment Using Cameras
 UAV Position and Attitude Sensoring in Indoor Environment Using Cameras 1 Peng Xu Abstract There are great advantages of indoor experiment for UAVs. Test flights of UAV in laboratory is more convenient,
UAV Position and Attitude Sensoring in Indoor Environment Using Cameras 1 Peng Xu Abstract There are great advantages of indoor experiment for UAVs. Test flights of UAV in laboratory is more convenient,
Over the years, they have been used several tools to perform aerial surveys of analyzed to archaeological sites and monuments. From the plane to the
 Over the years, they have been used several tools to perform aerial surveys of analyzed to archaeological sites and monuments. From the plane to the balloon, the balloon to the telescopic rods, all of
Over the years, they have been used several tools to perform aerial surveys of analyzed to archaeological sites and monuments. From the plane to the balloon, the balloon to the telescopic rods, all of
DRONE MOUNTED NATURAL GAS PIPELINE LEAK DETECTION AND ASSET SAFETY MONITORING
 DRONE MOUNTED NATURAL GAS PIPELINE LEAK DETECTION AND ASSET SAFETY MONITORING KEY WORDS: Asset monitoring, Safety checks, performance analysis, Mid IR range, Laser based Methane detection, unmanned aerial
DRONE MOUNTED NATURAL GAS PIPELINE LEAK DETECTION AND ASSET SAFETY MONITORING KEY WORDS: Asset monitoring, Safety checks, performance analysis, Mid IR range, Laser based Methane detection, unmanned aerial
Dynamical Modeling and Controlof Quadrotor
 Dynamical Modeling and Controlof Quadrotor Faizan Shahid NUST PNEC Pakistan engr.faizan_shahid@hotmail.com Muhammad Bilal Kadri, Nasir Aziz Jumani, Zaid Pirwani PAF KIET Pakistan bilal.kadri@pafkiet.edu.pk
Dynamical Modeling and Controlof Quadrotor Faizan Shahid NUST PNEC Pakistan engr.faizan_shahid@hotmail.com Muhammad Bilal Kadri, Nasir Aziz Jumani, Zaid Pirwani PAF KIET Pakistan bilal.kadri@pafkiet.edu.pk
Computer Pilot. Group 7. Nick McIntosh 1 Takashi V. Sato 2 Jing Chyuan Soong 3 Chee Boon Tan 4 Yutaka Tsutano 5. April 27, 2007
 ELEC495 Senior Desgin Project Computer Pilot Group 7 Nick McIntosh 1 Takashi V. Sato 2 Jing Chyuan Soong 3 Chee Boon Tan 4 Yutaka Tsutano 5 April 27, 2007 1 E-mail: mcintoshnick69@hotmail.com 2 E-mail:
ELEC495 Senior Desgin Project Computer Pilot Group 7 Nick McIntosh 1 Takashi V. Sato 2 Jing Chyuan Soong 3 Chee Boon Tan 4 Yutaka Tsutano 5 April 27, 2007 1 E-mail: mcintoshnick69@hotmail.com 2 E-mail:
Unmanned Aerial Vehicle of BITS Pilani, Dubai Campus for the International Aerial Robotics Competition 2011
 Unmanned Aerial Vehicle of BITS Pilani, Dubai Campus for the International Aerial Robotics Competition 2011 Saurabh Ladha, Deepan Kishore Kumar, Robin Singh,Pavitra Bhalla, Anant Mittal, Aditya Jain, Anshul
Unmanned Aerial Vehicle of BITS Pilani, Dubai Campus for the International Aerial Robotics Competition 2011 Saurabh Ladha, Deepan Kishore Kumar, Robin Singh,Pavitra Bhalla, Anant Mittal, Aditya Jain, Anshul
ESTGIS 2012 Priit Leomar 1
 5.12.2012 ESTGIS 2012 Priit Leomar 1 ELI 1995 Haljas tee 25 Tallinn 12012 Estonia +372 6480242 eli@eli.ee 5.12.2012 ESTGIS 2012 Priit Leomar 2 MAIN ACTIVITIES ELI ELI MILITARY SIMULATIONS ELI ENGINEERING
5.12.2012 ESTGIS 2012 Priit Leomar 1 ELI 1995 Haljas tee 25 Tallinn 12012 Estonia +372 6480242 eli@eli.ee 5.12.2012 ESTGIS 2012 Priit Leomar 2 MAIN ACTIVITIES ELI ELI MILITARY SIMULATIONS ELI ENGINEERING
Implementation of Decentralized Formation Control on Multi-Quadrotor Systems
 Implementation of Decentralized Formation Control on Multi-Quadrotor Systems by Nasrettin Koksal A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree
Implementation of Decentralized Formation Control on Multi-Quadrotor Systems by Nasrettin Koksal A thesis presented to the University of Waterloo in fulfillment of the thesis requirement for the degree
Visual Tracking and Following of a Quadrocopter by another Quadrocopter
 Visual Tracking and Following of a Quadrocopter by another Quadrocopter Karl E. Wenzel, Andreas Masselli and Andreas Zell Abstract We present a follow-the-leader scenario with a system of two small low-cost
Visual Tracking and Following of a Quadrocopter by another Quadrocopter Karl E. Wenzel, Andreas Masselli and Andreas Zell Abstract We present a follow-the-leader scenario with a system of two small low-cost
FUZZY LOGIC BASED QUADROTOR FLIGHT CONTROLLER
 FUZZY LOGIC BASED QUADROTOR FLIGHT CONTROLLER Syed Ali Raza and Wail Gueaieb School of Information Technology and Engineering, University of Ottawa 8 King Edward Avenue, Ottawa, ON, Canada syedali.raza@uottawa.ca,
FUZZY LOGIC BASED QUADROTOR FLIGHT CONTROLLER Syed Ali Raza and Wail Gueaieb School of Information Technology and Engineering, University of Ottawa 8 King Edward Avenue, Ottawa, ON, Canada syedali.raza@uottawa.ca,
Using the Paparazzi UAV System for Scientific Research
 Using the Paparazzi UAV System for Scientific Research Gautier Hattenberger, Murat Bronz, and Michel Gorraz ENAC, MAIAA, University of Toulouse, France IMAV2014 Delft August 2014 Hattenberger, Bronz, Gorraz
Using the Paparazzi UAV System for Scientific Research Gautier Hattenberger, Murat Bronz, and Michel Gorraz ENAC, MAIAA, University of Toulouse, France IMAV2014 Delft August 2014 Hattenberger, Bronz, Gorraz
2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE
 Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
System Identification, State Estimation, and Control of. Unmanned Aerial Robots. Caleb Chamberlain
 System Identification, State Estimation, and Control of Unmanned Aerial Robots Caleb Chamberlain A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements
System Identification, State Estimation, and Control of Unmanned Aerial Robots Caleb Chamberlain A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements
Design and Analysis of Quadcopter Classical Controller Ahmed H. Ahmed*, Ahmed N. Ouda*, Ahmed M.Kamel*, Y. Z. Elhalwagy*
 16 th International Conference on AEROSPACE SCIENCES & AVIATION TECHNOLOGY, ASAT - 16 May 26-28, 2015, E-Mail: asat@mtc.edu.eg Military Technical College, Kobry Elkobbah, Cairo, Egypt Tel : +(202) 24025292
16 th International Conference on AEROSPACE SCIENCES & AVIATION TECHNOLOGY, ASAT - 16 May 26-28, 2015, E-Mail: asat@mtc.edu.eg Military Technical College, Kobry Elkobbah, Cairo, Egypt Tel : +(202) 24025292
Elective in Robotics. Quadrotor Modeling (Marilena Vendittelli)
") Elective in Robotics Quadrotor Modeling (Marilena Vendittelli) Introduction Modeling Control Problems Models for control Main control approaches Elective in Robotics - Quadrotor Modeling (M. Vendittelli)
Elective in Robotics Quadrotor Modeling (Marilena Vendittelli) Introduction Modeling Control Problems Models for control Main control approaches Elective in Robotics - Quadrotor Modeling (M. Vendittelli)
Visual Servoing for Tracking Features in Urban Areas Using an Autonomous Helicopter
 Visual Servoing for Tracking Features in Urban Areas Using an Autonomous Helicopter Abstract The use of Unmanned Aerial Vehicles (UAVs) in civilian and domestic applications is highly demanding, requiring
Visual Servoing for Tracking Features in Urban Areas Using an Autonomous Helicopter Abstract The use of Unmanned Aerial Vehicles (UAVs) in civilian and domestic applications is highly demanding, requiring
Close Range Operation. Warning: Personal Safety Applications. MaxBotix Inc. Copyright MaxBotix Incorporated Patent 7,679,996
 HRUSB-MaxSonar -EZ Series USB Rangefinder, High Resolution Precision MB1403, MB1413, MB1423, MB1433, MB1443 4 The HRUSB-MaxSonar-EZ sensor line is a cost-effective solution for applications where precision
HRUSB-MaxSonar -EZ Series USB Rangefinder, High Resolution Precision MB1403, MB1413, MB1423, MB1433, MB1443 4 The HRUSB-MaxSonar-EZ sensor line is a cost-effective solution for applications where precision
A Novel Marker Based Tracking Method for Position and Attitude Control of MAVs
 A Novel Marker Based Tracking Method for Position and Attitude Control of MAVs A. Masselli and A. Zell Abstract In this paper we present a novel method for pose estimation for micro aerial vehicles (MAVs),
A Novel Marker Based Tracking Method for Position and Attitude Control of MAVs A. Masselli and A. Zell Abstract In this paper we present a novel method for pose estimation for micro aerial vehicles (MAVs),
Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots
 Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-04-29 Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots Stephen C. Quebe Brigham Young University
Brigham Young University BYU ScholarsArchive All Theses and Dissertations 2013-04-29 Modeling, Parameter Estimation, and Navigation of Indoor Quadrotor Robots Stephen C. Quebe Brigham Young University
DJI Ace One product release notes
 Date : 26 July 2012 Ace One firmware version : 4.02 Ace Assistant software version : 2.4 Low Voltage Warning Semi Auto Takeoff & Landing (Optional) Ground Station chargeable functions: View (optional)
Date : 26 July 2012 Ace One firmware version : 4.02 Ace Assistant software version : 2.4 Low Voltage Warning Semi Auto Takeoff & Landing (Optional) Ground Station chargeable functions: View (optional)
Low Cost solution for Pose Estimation of Quadrotor
 Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
Low Cost solution for Pose Estimation of Quadrotor mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute of Technology, Kanpur Mangal Kothari
FLYCAM Artist L4500 PRO MK2 Instruction Manual
 FLYCAM Artist L4500 PRO MK2 Instruction Manual FLYCAM Artist L4500 PRO MK2 camera mount is a super efficient tool specifically designed for hobbyists who d love to use wireless video cameras. It will fulfill
FLYCAM Artist L4500 PRO MK2 Instruction Manual FLYCAM Artist L4500 PRO MK2 camera mount is a super efficient tool specifically designed for hobbyists who d love to use wireless video cameras. It will fulfill
Lecture: Autonomous micro aerial vehicles
 Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
Lecture: Autonomous micro aerial vehicles Friedrich Fraundorfer Remote Sensing Technology TU München 1/41 Autonomous operation@eth Zürich Start 2/41 Autonomous operation@eth Zürich 3/41 Outline MAV system
An Indoor Flying Platform with Collision Robustness and Self-Recovery
 An Indoor Flying Platform with Collision Robustness and Self-Recovery Adam Klaptocz, Grégoire Boutinard-Rouelle, Adrien Briod, Jean-Christophe Zufferey, Dario Floreano Abstract This paper presents a new
An Indoor Flying Platform with Collision Robustness and Self-Recovery Adam Klaptocz, Grégoire Boutinard-Rouelle, Adrien Briod, Jean-Christophe Zufferey, Dario Floreano Abstract This paper presents a new
Quadrotor Flight Control Software Development
 International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347-5161 2014 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Abubakar
International Journal of Current Engineering and Technology E-ISSN 2277 4106, P-ISSN 2347-5161 2014 INPRESSCO, All Rights Reserved Available at http://inpressco.com/category/ijcet Research Article Abubakar
Implementation of Estimation and Control Solutions in Quadcopter Platforms
 Implementation of Estimation and Control Solutions in Quadcopter Platforms Flávio de Almeida Justino flavio.justino@tecnico.ulisboa.pt Instituto Superior Técnico, Universidade de Lisboa, Lisboa, Portugal
Implementation of Estimation and Control Solutions in Quadcopter Platforms Flávio de Almeida Justino flavio.justino@tecnico.ulisboa.pt Instituto Superior Técnico, Universidade de Lisboa, Lisboa, Portugal
Soft Computing Control System of an unmanned airship
 Proceedings of the 2011 International Conference on Industrial Engineering and Operations ManageKuala Lumpur, Malaysia, January 22 24, 2011 Soft Computing Control System of an unmanned airship Ali Chekima
Proceedings of the 2011 International Conference on Industrial Engineering and Operations ManageKuala Lumpur, Malaysia, January 22 24, 2011 Soft Computing Control System of an unmanned airship Ali Chekima
A Study of Fractal Geometry for Wing Design
 AMRC Design and Prototyping Group Case Study A Study of Fractal Geometry for Wing Design 1 Summary The AMRC Design and Prototyping Group (DPG) has carried out a study of self-supporting printed structures
AMRC Design and Prototyping Group Case Study A Study of Fractal Geometry for Wing Design 1 Summary The AMRC Design and Prototyping Group (DPG) has carried out a study of self-supporting printed structures
Vision-Based Precision Landings of a Tailsitter UAV. P. Travis Millet
 Vision-Based Precision Landings of a Tailsitter UAV P. Travis Millet A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of
Vision-Based Precision Landings of a Tailsitter UAV P. Travis Millet A thesis submitted to the faculty of Brigham Young University in partial fulfillment of the requirements for the degree of Master of
United Vision Solutions
 United Vision Solutions 10 Center Sr., Suite 401 & 402, Chicopee, MA 01013, USA Email: sales@unitedvisionsolutions.com Email: info@unitedvisionsolutions.com Sales Dept. 413-592-8477 United Vision Solutions,
United Vision Solutions 10 Center Sr., Suite 401 & 402, Chicopee, MA 01013, USA Email: sales@unitedvisionsolutions.com Email: info@unitedvisionsolutions.com Sales Dept. 413-592-8477 United Vision Solutions,
THE AIVA FLY-BY-WIRELESS UAV PLATFORM
 THE AIVA FLY-BY-WIRELESS UAV PLATFORM The AIVA project concerns to an UAV aimed to perform aerial surveillance, forest fire detection and also to monitor high voltage cables for stress or failures. The
THE AIVA FLY-BY-WIRELESS UAV PLATFORM The AIVA project concerns to an UAV aimed to perform aerial surveillance, forest fire detection and also to monitor high voltage cables for stress or failures. The
Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform. Project Proposal. Cognitive Robotics, Spring 2005
 Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform Project Proposal Cognitive Robotics, Spring 2005 Kaijen Hsiao Henry de Plinval Jason Miller Introduction In the context
Mapping Contoured Terrain Using SLAM with a Radio- Controlled Helicopter Platform Project Proposal Cognitive Robotics, Spring 2005 Kaijen Hsiao Henry de Plinval Jason Miller Introduction In the context
Optical Flow for Heading Estimation of a Quadrotor Helicopter
 Optical Flow for Heading Estimation of a Quadrotor Helicopter John Stowers, Andrew Bainbridge-Smith, Michael Hayes and Steven Mills University of Canterbury, New Zealand ABSTRACT This paper demonstrates
Optical Flow for Heading Estimation of a Quadrotor Helicopter John Stowers, Andrew Bainbridge-Smith, Michael Hayes and Steven Mills University of Canterbury, New Zealand ABSTRACT This paper demonstrates
Dynamic Modelling and Simulation of a Vectored Thrust Quad-Rotor
 Dynamic Modelling and Simulation of a Vectored Thrust Quad-Rotor Benjamin Faul School of Mechanical and Manufacturing Engineering University of New South Wales Sydney, NSW 252 Email: benjaminfaul@bigpond.com
Dynamic Modelling and Simulation of a Vectored Thrust Quad-Rotor Benjamin Faul School of Mechanical and Manufacturing Engineering University of New South Wales Sydney, NSW 252 Email: benjaminfaul@bigpond.com
Development Of A Quadrotor Testbed For Control And Sensor Development
 Clemson University TigerPrints All Theses Theses 12-2008 Development Of A Quadrotor Testbed For Control And Sensor Development Abhishek Bhargava Clemson University, mailbox.abhi@gmail.com Follow this and
Clemson University TigerPrints All Theses Theses 12-2008 Development Of A Quadrotor Testbed For Control And Sensor Development Abhishek Bhargava Clemson University, mailbox.abhi@gmail.com Follow this and
LibrePilot GCS Tutorial
 LibrePilot GCS Tutorial BY Wirginia Tomczyk page 1 of 13 Introduction The first dron of Drone Team project use Open Pilot Copter Control (CC). It is the flight controller supported by LibrePilot firmware.
LibrePilot GCS Tutorial BY Wirginia Tomczyk page 1 of 13 Introduction The first dron of Drone Team project use Open Pilot Copter Control (CC). It is the flight controller supported by LibrePilot firmware.
Sphero Lightning Lab Cheat Sheet
 Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Actions Tool Description Variables Ranges Roll Combines heading, speed and time variables to make the robot roll. Duration Speed Heading (0 to 999999 seconds) (degrees 0-359) Set Speed Sets the speed of
Project: UAV Payload Retract Mechanism. Company Background. Introduction
 Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
Ascent Vision Technologies LLC 90 Aviation Lane Belgrade, MT 59714 Tel 406.388.2092 Fax 406.388.8133 www.ascentvision.com Project: UAV Payload Retract Mechanism Company Background Ascent Vision Technologies
GPS denied Navigation Solutions
 GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
GPS denied Navigation Solutions Krishnraj Singh Gaur and Mangal Kothari ksgaur@iitk.ac.in, mangal@iitk.ac.in https://www.iitk.ac.in/aero/mangal/ Intelligent Guidance and Control Laboratory Indian Institute
Inspire 2 Release Notes
 Date: 2018.04.18 Remote Controller Firmware: DJI GO 4 app: V01.02.0100 V01.01.0010 ios V 4.2.12 or above, Android V 4.2.12 or above Added support for adjusting the maximum velocity of aircraft s real-time
Date: 2018.04.18 Remote Controller Firmware: DJI GO 4 app: V01.02.0100 V01.01.0010 ios V 4.2.12 or above, Android V 4.2.12 or above Added support for adjusting the maximum velocity of aircraft s real-time
Multi-MAV Deployment
 Multi-MAV Deployment A Major Qualifying Project Report Submitted to the Faculty Of the Worcester Polytechnic Institute In partial fulfillment of the requirements for the Degree of Bachelor of Science In
Multi-MAV Deployment A Major Qualifying Project Report Submitted to the Faculty Of the Worcester Polytechnic Institute In partial fulfillment of the requirements for the Degree of Bachelor of Science In
REAL FLIGHT DEMONSTRATION OF PITCH AND ROLL CONTROL FOR UAV CANYON FLIGHTS
 REAL FLIGHT DEMONSTRATION OF PITCH AND ROLL CONTROL FOR UAV CANYON FLIGHTS Cezary KOWNACKI * * Faculty of Mechanical Engineering, Department of Automatics and Robotics, Bialystok University of Technology,
REAL FLIGHT DEMONSTRATION OF PITCH AND ROLL CONTROL FOR UAV CANYON FLIGHTS Cezary KOWNACKI * * Faculty of Mechanical Engineering, Department of Automatics and Robotics, Bialystok University of Technology,
Autonomous Control of Tilt Tri-Rotor Unmanned Aerial Vehicle
 Indian Journal of Science and Technology, Vol 9(36), DOI: 10.17485/ijst/2016/v9i36/102160, September 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Autonomous Control of Tilt Tri-Rotor Unmanned
Indian Journal of Science and Technology, Vol 9(36), DOI: 10.17485/ijst/2016/v9i36/102160, September 2016 ISSN (Print) : 0974-6846 ISSN (Online) : 0974-5645 Autonomous Control of Tilt Tri-Rotor Unmanned
Multi-Band (Ku, C, Wideband - Satcom, Narrowband Satcom) Telemetry Test System for UAV Application
 Telemetry Test System for UAV Application") Multi-Band (Ku, C, Wideband - Satcom, Narrowband Satcom) Telemetry Test System for UAV Application Murat IMAY Turkish Aerospace Ind, Inc. Ankara, Turkey mimay@tai.com.tr, muratimay@gmail.com ABSTRACT "This
Multi-Band (Ku, C, Wideband - Satcom, Narrowband Satcom) Telemetry Test System for UAV Application Murat IMAY Turkish Aerospace Ind, Inc. Ankara, Turkey mimay@tai.com.tr, muratimay@gmail.com ABSTRACT "This
ROBOT TEAMS CH 12. Experiments with Cooperative Aerial-Ground Robots
 ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
ROBOT TEAMS CH 12 Experiments with Cooperative Aerial-Ground Robots Gaurav S. Sukhatme, James F. Montgomery, and Richard T. Vaughan Speaker: Jeff Barnett Paper Focus Heterogeneous Teams for Surveillance
Unmanned Vehicle Technology Researches for Outdoor Environments. *Ju-Jang Lee 1)
") Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
Keynote Paper Unmanned Vehicle Technology Researches for Outdoor Environments *Ju-Jang Lee 1) 1) Department of Electrical Engineering, KAIST, Daejeon 305-701, Korea 1) jjlee@ee.kaist.ac.kr ABSTRACT The
Attach the propeller, install the battery and you enter the fascinating world of photography and aerial video.
 XPLORER V - XIRO - HD XPLORER V Platform 3-axis stabilized HD Camera 1080 Manufacturer:XIRODRONE Reference:AXR-16001 Loyalty points offered:291 Price:699.00 XPLORER V - XIRO - HD EVERYTHING YOU NEED IN
XPLORER V - XIRO - HD XPLORER V Platform 3-axis stabilized HD Camera 1080 Manufacturer:XIRODRONE Reference:AXR-16001 Loyalty points offered:291 Price:699.00 XPLORER V - XIRO - HD EVERYTHING YOU NEED IN
USE OF DRONE TECHNOLOGY AND PHOTOGRAMMETRY FOR BEACH MORPHODYNAMICS AND BREAKWATER MONITORING.
 Proceedings of the 6 th International Conference on the Application of Physical Modelling in Coastal and Port Engineering and Science (Coastlab16) Ottawa, Canada, May 10-13, 2016 Copyright : Creative Commons
Proceedings of the 6 th International Conference on the Application of Physical Modelling in Coastal and Port Engineering and Science (Coastlab16) Ottawa, Canada, May 10-13, 2016 Copyright : Creative Commons
Multilayer real-time video image stabilization
 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Multilayer real-time video image stabilization Jens Windau, Laurent Itti Abstract
2011 IEEE/RSJ International Conference on Intelligent Robots and Systems September 25-30, 2011. San Francisco, CA, USA Multilayer real-time video image stabilization Jens Windau, Laurent Itti Abstract