EECS 442 Computer Vision fall 2012
|
|
|
- Estella Underwood
- 6 years ago
- Views:
Transcription
 Class Time & Location Tu Th 3:00PM - 4:30PM -- G906 COOL Conversation hour [it s part of the course!] Wed 3:30PM - 4:30PM -- 1013 DOW http://www.eecs.umich.")
1 EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao Class Time & Location Tu Th 3:00PM - 4:30PM -- G906 COOL Conversation hour [it s part of the course!] Wed 3:30PM - 4:30PM DOW
2 EECS 442 Computer Vision fall 2011 Text books: [FP] D. A. Forsyth and J. Ponce. Computer Vision: A Modern Approach (2nd Edition). Prentice Hall, 2011 (or first edition, 2003). [HZ] R. Hartley and A. Zisserman. Multiple View Geometry in Computer Vision. Academic Press, [R] R. Szeliski, Computer Vision: Algorithms and Applications, Springer, 2011 [HS] D. Hoiem and S. Savarese. Representations and Techniques for 3D Object Recognition and Scene Interpretation, Synthesis lecture on Artificial Intelligence and Machine Learning. Morgan Claypool Publishers, 2011 If you plan to audit this class, please signup your name on the mailing list
3 Agenda Administrative Grading policy Project What is computer vision? Syllabus
4 Grading policy Homeworks: 40% 5 homeworks Mid term exam: 10% [end of October] Course project: 45% progress report 5% final report 30% presentation 10% Attendance and class participation: 5% Questions, answers, remarks Late policy home works: If 1 day late, 50% off the grade for that homework Zero credits if more than one day. A 48-hours one-time late submission bonus" is available; that is, you can use this bonus to submit your HW late (i.e. after at most 48 hours). This is one time bonus: After you use your bonus, you must adhere to the standard late submission policy. No exceptions will be made. Late policy project: If 1 day late, 25% off the grade for the project If 2 days late, 50% off the grade for the project Zero credits if more than 2 days No "late submission bonus" is allowed when submitting your exam or project. Collaboration policy Read the student code book, understand what is collaboration and what is academic infraction. Discussing project assignment with each other is allowed, but coding must be done individually Home works or class project coding policy: using on line code or other students/researchers code is not allowed in general. Exceptions can be made and individual cases will be discussed with the instructor.
5 Course Project Replicate an interesting paper Comparing different methods to a test bed A new approach to an existing problem Original research Write a 8-page paper summarizing your results Release the final code Give a presentation We will introduce projects in two weeks Important dates: look up class schedule
6 Course Project Form your team: 1-3 people the quality is judged regardless of the number of people on the team be nice to your partner: do you plan to drop the course? Evaluation Quality of the project (including writing) Final ~15 minutes project presentation in class students will vote your presentation! For final code and paper due dates please consult webpage
7 Agenda Administrative Grading policy Project What is computer vision? Syllabus
8 There was a table set out under a tree in front of the house, and the March Hare and the Hatter were having tea at it. The table was a large one, but the three were all crowded together at one corner of it From A Mad Tea-Party Alice's Adventures in Wonderland by Lewis Carroll Illustration by Arthur Rackham
9 Computer vision Image/video Object 1 Object N - semantic -semantic
10 Computer vision Image/video Object 1 Object N - semantic -geometry -semantic -geometry
11 Computer vision Image/video Object 1 Object N - semantic -geometry -semantic -geometry spatial & temporal relations


12 Computer vision Image/video Object 1 Object N - semantic -geometry -semantic -geometry spatial & temporal relations Scene -Semantic - geometry



13 Computer vision Computer vision studies the tools and theories that enable the design of machines that can extract useful information from imagery data (images and videos) toward the goal of interpreting the world Scene Objects People Actions Sensing device Computational device Extract information Interpretation Information: visual cues, 3D structure, motion flows, etc Interpretation: recognize objects, scenes, actions, events






14 Semantic Actions, Events Have we reached humans? not yet computer vision is still no match for human perception but catching up, particularly in certain areas Categorization Object Recognition 3D modeling 3D scenes Physical attributes


15 Optical character recognition (OCR) Technology to convert scanned docs to text License plate readers Digit recognition, AT&T labs Source: S. Seitz

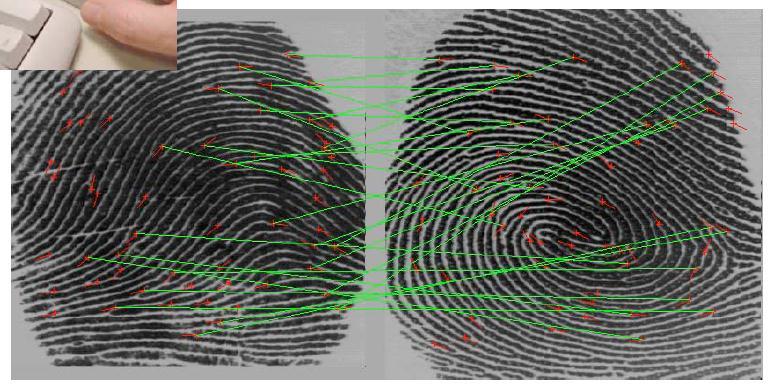

16 Biometrics Fingerprint recognition




17 Biometrics Iris Patterns recognition Source: S. Seitz How the Afghan Girl was Identified by Her Iris Patterns


18 Biometrics Face recognition systems Source: S. Seitz

19 Consumer applications

20 Consumer applications Face detection Many new digital cameras now detect faces Canon, Sony, Fuji, Source: S. Seitz

21 Consumer applications Smile detection Sony Cyber-shot T70 Digital Still Camera Source: S. Seitz




22 Special effects movies - videogames Source: S. Seitz

23 3D urban modeling Bing maps, Google Streetview Source: S. Seitz

24 3D urban modeling: Microsoft Photosynth Source: S. Seitz



25 Toy & Robots Credit slide: Fei-Fei Li

26 Mobile visual search: 4-Sep-12 27

27 Vision in supermarkets LaneHawk by EvolutionRobotics Source: S. Seitz
 Microsoft s Kinect Sony")
28 Vision-based interaction (and games) Microsoft s Kinect Sony EyeToy
 used for several tasks Panorama stitching 3D terrain")
29 Source: S. Seitz Vision for robotics, space exploration Vision systems (JPL) used for several tasks Panorama stitching 3D terrain modeling Obstacle detection, position tracking For more, read Computer Vision on Mars by Matthies et al. 30






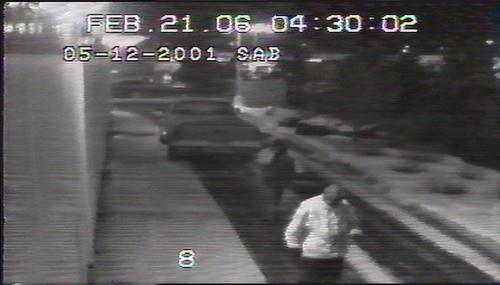
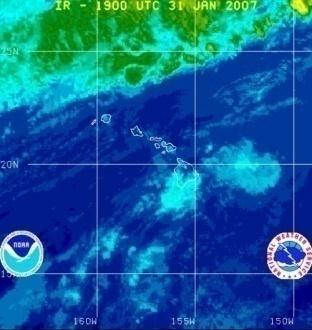
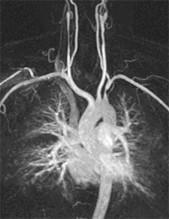
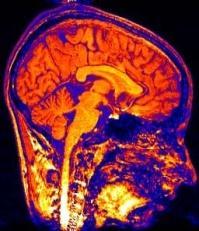
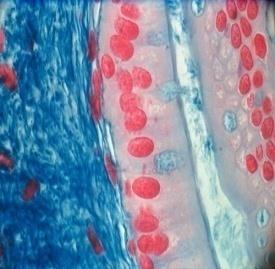
30 Applications of computer vision Medical Imaging Assistive technologies Surveillance Autonomous driving, robot navigation Sources: K. Grauman, L. Fei-Fei, S. Laznebick Driver assistance (collision warning, lane departure warning, rear object detection) Security
31 Automatic control Robotics Robot vision Signal processing Compression Non linear SP Multi-variate SP Neurobiology Biological vision Visual Psychophysics Data mining Image retrivial Computer vision Visual pattern recognition Machine learning Artificial intelligence Statistics Geometry Optimization Applied math Optics Smart cameras Acquisition methods Physics Imaging Computer graphics
32 EECS 442 course overview 1. Geometry 2. Low & Mid-level vision 3. High level vision
33 EECS 442 course overview 1. Geometry 2. Low & Mid-level vision 3. High level vision Geometry: - How to extract 3d information? - Which cues are useful? - What are the mathematical tools?

34 Visual cues: texture shading contours shadows reflections
35 Visual cues: texture shading contours shadows reflections
36 Visual cues: texture shading contours shadows reflections
37 Vision techniques Visual cues: texture shading contours shadows reflections

38 Visual cues: texture shading contours shadows reflections
39 Vision techniques Visual cues: texture shading contours shadows reflections Number of observers: monocular multiple views camera
40 Vision techniques Visual cues: texture shading contours shadows reflections Number of observers: monocular multiple views camera 1 camera 2 camera N


")



41 Stereo Epipolar geometry Tomasi & Kanade (1993) Structure from motion Image sources: S. Laznebick Projective structure from motion: Here be dragons!


42 Structure from motion Courtesy of Exford Visual Geometry Group
43 Vision techniques Visual cues: texture shading contours shadows reflections Number of observers: monocular multiple views Active lighting: laser stripes structured lighting patterns camera Laser/projector/light


44 3D Scanning Scanning Michelangelo s The David The Digital Michelangelo Project BILLION polygons, accuracy to.29mm Courtesy of Stanford computer graphics lab



45 3D Digital models Architecture Entertainment Medicine

46 The yellow line in superbowls


47 The yellow line in superbowls
48 Course overview 1. Geometry 2. Low & Mid-level vision 3. High level vision Mid-level vision: - Extract useful building blocks - Region segmentation - Motion flows


49 Extract useful building blocks




50 Mid-level vision Extract useful building blocks Alignment Extract planar regions Object segmentation

51 Image enhancement

52 Automatic Panorama Stitching Sources: M. Brown

53 Automatic Panorama Stitching Sources: M. Brown


54 Image Modeling

55 Tracking and 3D modeling Courtesy of Jean-Yves Bouguet Vision Lab, California Institute of Technology

56 Camera tracking and V.R. insertions Courtesy of Exford Visual Geometry Group
57 Course overview 1. Geometry 2. Low & Mid-level vision 3. High level vision High level operations Recognition of objects and people Places Actions & events

58 Object recognition and categorization Building Downtown chicago clock person car Pedestrians crossing street



59 Challenges: viewpoint variation Michelangelo slide credit: Fei-Fei, Fergus & Torralba

60 Challenges: illumination image credit: J. Koenderink


61 Challenges: scale slide credit: Fei-Fei, Fergus & Torralba


62 Challenges: deformation

63 Challenges: occlusion Magritte, 1957 slide credit: Fei-Fei, Fergus & Torralba

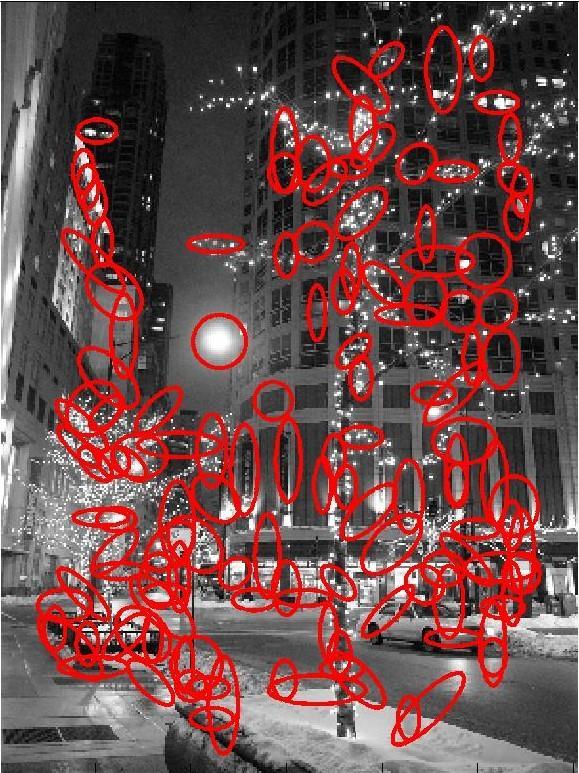
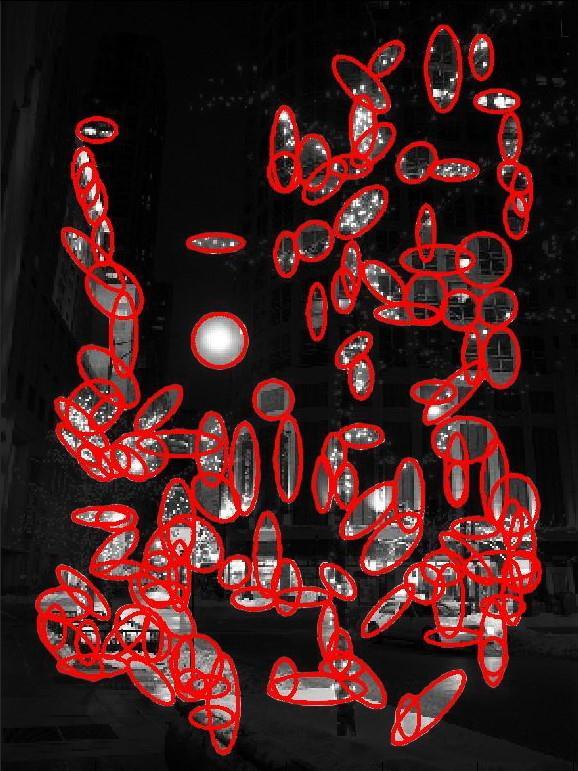
64 Challenges: background clutter Kilmeny Niland. 1995






65 Challenges: object intra-class variation slide credit: Fei-Fei, Fergus & Torralba

66
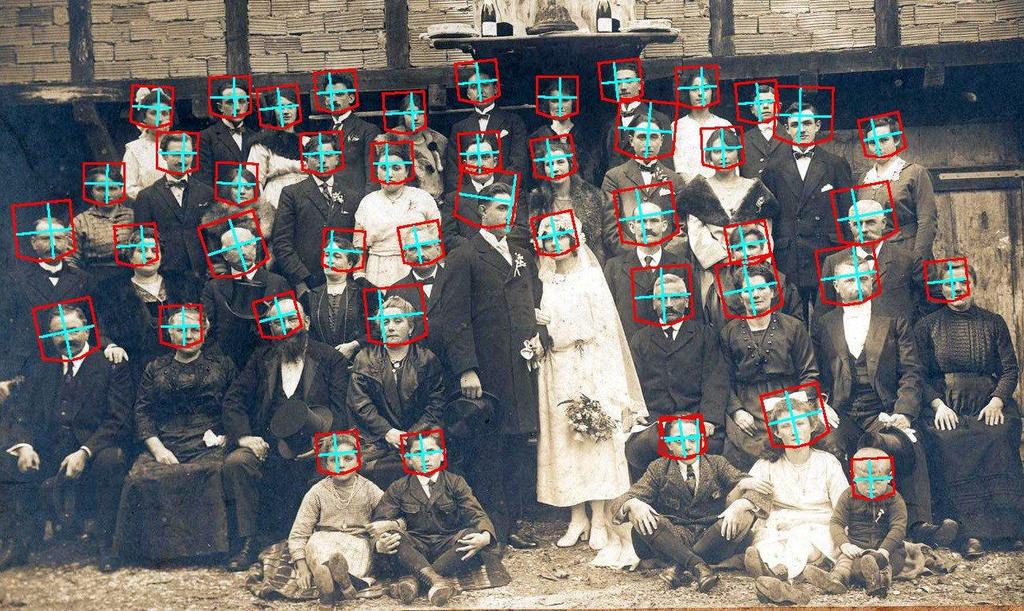
67 Face recognition




68 Recognizing scenes





















69 Sorting out millions of images/videos Personal photo albums Movies, news, sports Surveillance and security Medical and scientific images Credit slide: S. Lazebnik


70 Choi & Shahid & Savarese WMC 2010 Choi & Savarese, ECCV 2010 Detecting and tracking people



71 Recognizing human activities Biking Walking Walking Credit slide: Song & Perona
72 There was a table set out under a tree in front of the house, and the March Hare and the Hatter were having tea at it. The table was a large one, but the three were all crowded together at one corner of it From A Mad Tea-Party Alice's Adventures in Wonderland by Lewis Carroll
73 Syllabus See webpage
74 Next lecture - Review of linear algebra for multi-view geometry - Basic image transformations
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EE290T : 3D Reconstruction and Recognition
 EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
EE290T : 3D Reconstruction and Recognition Acknowledgement Courtesy of Prof. Silvio Savarese. Introduction There was a table set out under a tree in front of the house, and the March Hare and the Hatter
Introductions. Today. Computer Vision Jan 19, What is computer vision? 1. Vision for measurement. Computer Vision
 Introductions Instructor: Prof. Kristen Grauman grauman@cs.utexas.edu Computer Vision Jan 19, 2011 TA: Shalini Sahoo shalini@cs.utexas.edu Today What is computer vision? Course overview Requirements, logistics
Introductions Instructor: Prof. Kristen Grauman grauman@cs.utexas.edu Computer Vision Jan 19, 2011 TA: Shalini Sahoo shalini@cs.utexas.edu Today What is computer vision? Course overview Requirements, logistics
Introduction to Computer Vision. CSE 152, Spring Introduction to Computer Vision. CSE 152, Spring Introduction to Computer Vision
 We ll begin with some introductory material Introduction CSE 152 Lecture 1 and end with Syllabus Organizational materials Wait list What is computer vision? What is Computer Vision? Trucco and Verri: Computing
We ll begin with some introductory material Introduction CSE 152 Lecture 1 and end with Syllabus Organizational materials Wait list What is computer vision? What is Computer Vision? Trucco and Verri: Computing
12/3/2009. What is Computer Vision? Applications. Application: Assisted driving Pedestrian and car detection. Application: Improving online search
 Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Introduction to Artificial Intelligence V22.0472-001 Fall 2009 Lecture 26: Computer Vision Rob Fergus Dept of Computer Science, Courant Institute, NYU Slides from Andrew Zisserman What is Computer Vision?
Overview. Introduction to Computer Vision. CSE 152 Lecture 1. Introduction to Computer Vision. CSE 152, Spring 2018
 Overview CSE 152 Lecture 1 We ll begin with some introductory material and end with Syllabus Organizational materials Wait list What is computer vision? Done? Computer Vision An interdisciplinary field
Overview CSE 152 Lecture 1 We ll begin with some introductory material and end with Syllabus Organizational materials Wait list What is computer vision? Done? Computer Vision An interdisciplinary field
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Introduction. Computer Vision. Computer Vision. What is computer vision? Related Fields. We ll begin with some introductory material.
 We ll begin with some introductory material Introduction CSE 152 Lecture 1 and end with Syllabus Organizational materials Wait list What is computer vision? Done? Computer Vision An interdisciplinary field
We ll begin with some introductory material Introduction CSE 152 Lecture 1 and end with Syllabus Organizational materials Wait list What is computer vision? Done? Computer Vision An interdisciplinary field
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Computer Vision EE837, CS867, CE803
 Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Introduction. What is Computer Vision? Why is this hard? Underestimates. What is computer vision? We ll begin with some introductory material
 Introduction CSE 252A Lecture 1 We ll begin with some introductory material and end with Syllabus Organizational materials Wait list What is computer vision? What is Computer Vision? Trucco and Verri:
Introduction CSE 252A Lecture 1 We ll begin with some introductory material and end with Syllabus Organizational materials Wait list What is computer vision? What is Computer Vision? Trucco and Verri:
3D Computer Vision Introduction
 3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
CS4495/6495 Introduction to Computer Vision. 1A-L1 Introduction
 CS4495/6495 Introduction to Computer Vision 1A-L1 Introduction Outline What is computer vision? State of the art Why is this hard? Course overview Software Why study Computer Vision? Images (and movies)
CS4495/6495 Introduction to Computer Vision 1A-L1 Introduction Outline What is computer vision? State of the art Why is this hard? Course overview Software Why study Computer Vision? Images (and movies)
3D Computer Vision. Introduction. Introduction. CSc I6716 Fall Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
CSCD18: Computer Graphics. Instructor: Leonid Sigal
 CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
Have you ever used computer vision? How? Where? Think-Pair-Share
 Have you ever used computer vision? How? Where? Think-Pair-Share Jitendra Malik, UC Berkeley Three R s of Computer Vision Jitendra Malik, UC Berkeley Three R s of Computer Vision The classic problems of
Have you ever used computer vision? How? Where? Think-Pair-Share Jitendra Malik, UC Berkeley Three R s of Computer Vision Jitendra Malik, UC Berkeley Three R s of Computer Vision The classic problems of
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Course Administration
 Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Course Administration Project 2 results are online Project 3 is out today The first quiz is a week from today (don t panic!) Covers all material up to the quiz Emphasizes lecture material NOT project topics
Computer Vision. Introduction
 Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
Computer Vision Introduction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 About this course Official
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
3D Computer Vision Introduction
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2013 gerig@sci.utah.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Administrivia Classes:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2013 gerig@sci.utah.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Administrivia Classes:
CS535: Interactive Computer Graphics
 CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
Introduction to Computer Vision MARCH 2018
 Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Image Analysis. Lars Schmidt-Thieme
 Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Session 18 Object Recognition I Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering Lab
Digital Images. Kyungim Baek. Department of Information and Computer Sciences. ICS 101 (November 1, 2016) Digital Images 1
 Digital Images 1") Digital Images Kyungim Baek Department of Information and Computer Sciences ICS 101 (November 1, 2016) Digital Images 1 iclicker Question I know a lot about how digital images are represented, stored,
Digital Images Kyungim Baek Department of Information and Computer Sciences ICS 101 (November 1, 2016) Digital Images 1 iclicker Question I know a lot about how digital images are represented, stored,
CS231M Mobile Computer Vision Spring 2014
 CS231M Mobile Computer Vision Spring 2014 Instructors: - Prof Silvio Savarese (Stanford, CVGLab) - Dr Kari Pulli (Nvidia Research) CAs: - Saumitro Dasgupta saumitro@stanford.edu - Francois Chaubard fchaubar@stanford.edu
CS231M Mobile Computer Vision Spring 2014 Instructors: - Prof Silvio Savarese (Stanford, CVGLab) - Dr Kari Pulli (Nvidia Research) CAs: - Saumitro Dasgupta saumitro@stanford.edu - Francois Chaubard fchaubar@stanford.edu
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
CSE 167: Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
Methods for Representing and Recognizing 3D objects
 Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
Methods for Representing and Recognizing 3D objects part 1 Silvio Savarese University of Michigan at Ann Arbor Object: Building, 45º pose, 8-10 meters away Object: Person, back; 1-2 meters away Object:
CS380: Computer Graphics Introduction. Sung-Eui Yoon ( 윤성의 ) Course URL:
 Course URL:") CS380: Computer Graphics Introduction Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg About the Instructor Joined KAIST at 2007 Main Research Focus Handle massive data for various
CS380: Computer Graphics Introduction Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg About the Instructor Joined KAIST at 2007 Main Research Focus Handle massive data for various
Computer Vision, CS766. Staff. Instructor: Li Zhang TA: Jake Rosin
 Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
CSE 527: Intro. to Computer
 CSE 527: Intro. to Computer Vision CSE 527: Intro. to Computer Vision www.cs.sunysb.edu/~cse527 Instructor: Prof. M. Alex O. Vasilescu Email: maov@cs.sunysb.edu Phone: 631 632-8457 Office: 1421 Prerequisites:
CSE 527: Intro. to Computer Vision CSE 527: Intro. to Computer Vision www.cs.sunysb.edu/~cse527 Instructor: Prof. M. Alex O. Vasilescu Email: maov@cs.sunysb.edu Phone: 631 632-8457 Office: 1421 Prerequisites:
Introduction to Computer Vision. Srikumar Ramalingam School of Computing University of Utah
 Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Introduction to Computer Vision Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Course Website http://www.eng.utah.edu/~cs6320/ What is computer vision? Light source 3D
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
CS5670: Intro to Computer Vision
 CS5670: Intro to Computer Vision Noah Snavely Introduction to Recognition mountain tree banner building street lamp people vendor Announcements Final exam, in-class, last day of lecture (5/9/2018, 12:30
CS5670: Intro to Computer Vision Noah Snavely Introduction to Recognition mountain tree banner building street lamp people vendor Announcements Final exam, in-class, last day of lecture (5/9/2018, 12:30
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Dec 1 st 3:30 PM 4:45 PM Goodwin Hall Atrium Grading Three
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Computer Vision. CS664 Computer Vision. 1. Introduction. Course Requirements. Preparation. Applications. Applications of Computer Vision
 Computer Vision CS664 Computer Vision. Introduction Dan Huttenlocher Machines that see Broad field, any course will cover a subset of problems and techniques Closely related fields of study Artificial
Computer Vision CS664 Computer Vision. Introduction Dan Huttenlocher Machines that see Broad field, any course will cover a subset of problems and techniques Closely related fields of study Artificial
Lecture 9 & 10: Stereo Vision
 Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
Lecture 9 & 10: Stereo Vision Professor Fei- Fei Li Stanford Vision Lab 1 What we will learn today? IntroducEon to stereo vision Epipolar geometry: a gentle intro Parallel images Image receficaeon Solving
CSE 167: Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
What do we mean by recognition?
 Announcements Recognition Project 3 due today Project 4 out today (help session + photos end-of-class) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski, Chapter 14 1 Recognition What
Announcements Recognition Project 3 due today Project 4 out today (help session + photos end-of-class) The Margaret Thatcher Illusion, by Peter Thompson Readings Szeliski, Chapter 14 1 Recognition What
Computer Vision and Virtual Reality. Introduction
 Computer Vision and Virtual Reality Introduction Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: October
Computer Vision and Virtual Reality Introduction Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: October
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
EE795: Computer Vision and Intelligent Systems Spring 2013 TTh 17:30-18:45 FDH 204 Lecture 18 130404 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Object Recognition Intro (Chapter 14) Slides from
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Course Name: Computer Vision Course Code: IT444
 Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Course Name: Computer Vision Course Code: IT444 I. Basic Course Information Major or minor element of program: Major Department offering the course:information Technology Department Academic level:400
Computer Vision Introduction
 Computer Vision Introduction Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Classes: Instructor:
Computer Vision Introduction Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Classes: Instructor:
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Verification: is that a lamp? What do we mean by recognition? Recognition. Recognition
 Recognition Recognition The Margaret Thatcher Illusion, by Peter Thompson The Margaret Thatcher Illusion, by Peter Thompson Readings C. Bishop, Neural Networks for Pattern Recognition, Oxford University
Recognition Recognition The Margaret Thatcher Illusion, by Peter Thompson The Margaret Thatcher Illusion, by Peter Thompson Readings C. Bishop, Neural Networks for Pattern Recognition, Oxford University
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
There are many cues in monocular vision which suggests that vision in stereo starts very early from two similar 2D images. Lets see a few...
 STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
STEREO VISION The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their own
CS5620 Intro to Computer Graphics
 CS 5620 Fall 2015 www.youtube.com/watch?v=hjhic0mt4ts 3 Computer Graphics Synthesis of static/dynamic 2D images from 3D geometry using computers Teaching Staff Lecturer: Prof. Craig Gotsman Class: Mon
CS 5620 Fall 2015 www.youtube.com/watch?v=hjhic0mt4ts 3 Computer Graphics Synthesis of static/dynamic 2D images from 3D geometry using computers Teaching Staff Lecturer: Prof. Craig Gotsman Class: Mon
Computer Vision. Alexandra Branzan Albu Spring 2009
 Computer Vision Alexandra Branzan Albu Spring 2009 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 315): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2009 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 315): by appointment CENG 421/ ELEC 536 : Computer
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Computer Vision 2 Lecture 1
 Computer Vision 2 Lecture 1 Introduction (14.04.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de Organization
Computer Vision 2 Lecture 1 Introduction (14.04.2016) leibe@vision.rwth-aachen.de, stueckler@vision.rwth-aachen.de RWTH Aachen University, Computer Vision Group http://www.vision.rwth-aachen.de Organization
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Lecture 0 of 41: Part A Course Organization. Introduction to Computer Graphics: Course Organization and Survey
 Lecture 0 of 41: Part A Course Organization : Course Organization and Survey William H. Hsu Department of Computing and Information Sciences, KSU KSOL course page: http://bit.ly/hgvxlh Course web site:
Lecture 0 of 41: Part A Course Organization : Course Organization and Survey William H. Hsu Department of Computing and Information Sciences, KSU KSOL course page: http://bit.ly/hgvxlh Course web site:
Welcome to CS 4/57101 Computer Graphics
 Welcome to CS 4/57101 Computer Graphics Goal: The goal of this course is to provide an introduction to the theory and practice of computer graphics. The course will assume a good background in programming
Welcome to CS 4/57101 Computer Graphics Goal: The goal of this course is to provide an introduction to the theory and practice of computer graphics. The course will assume a good background in programming
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
Contexts and 3D Scenes
 Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
Contexts and 3D Scenes Computer Vision Jia-Bin Huang, Virginia Tech Many slides from D. Hoiem Administrative stuffs Final project presentation Nov 30 th 3:30 PM 4:45 PM Grading Three senior graders (30%)
EECS 442 Computer vision. 3D Object Recognition and. Scene Understanding
 EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
EECS 442 Computer vision 3D Object Recognition and Scene Understanding Interpreting the visual world Object: Building 8-10 meters away Object: Traffic light Object: Car, ¾ view 2-3 meters away How can
Image formation - About the course. Grading & Project. Tentative Schedule. Course Content. Students introduction
 About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
About the course Instructors: Haibin Ling (hbling@temple, Wachman 305) Hours Lecture: Tuesda 5:30-8:00pm, TTLMAN 403B Office hour: Tuesda 3:00-5:00pm, or b appointment Tetbook Computer Vision: Models,
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Computer Vision. Alexandra Branzan Albu Spring 2010
 Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Introduction. Prof. Kyoung Mu Lee SoEECS, Seoul National University
 Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
The Hilbert Problems of Computer Vision. Jitendra Malik UC Berkeley & Google, Inc.
 The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
The Hilbert Problems of Computer Vision Jitendra Malik UC Berkeley & Google, Inc. This talk The computational power of the human brain Research is the art of the soluble Hilbert problems, circa 2004 Hilbert
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Tracking wrapup Course recap. Announcements
 Tracking wrapup Course recap Tuesda, Dec 1 Announcements Pset 4 grades and solutions available toda Reminder: Pset 5 due 12/4, extended to 12/8 if needed Choose between Section I (short answers) and II
Tracking wrapup Course recap Tuesda, Dec 1 Announcements Pset 4 grades and solutions available toda Reminder: Pset 5 due 12/4, extended to 12/8 if needed Choose between Section I (short answers) and II
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
CSCE 441 Computer Graphics Fall 2018
 CSCE 441 Computer Graphics Fall 2018 Meetings: Monday, Wednesday, Friday 9:10-10:00 a.m. Location: HRBB 113 Instructor: Dr. John Keyser Office: 527C, H.R. Bright Building Phone: 458-0167 Email: keyser@cse.tamu.edu
CSCE 441 Computer Graphics Fall 2018 Meetings: Monday, Wednesday, Friday 9:10-10:00 a.m. Location: HRBB 113 Instructor: Dr. John Keyser Office: 527C, H.R. Bright Building Phone: 458-0167 Email: keyser@cse.tamu.edu
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Image Analysis. Lars Schmidt-Thieme
 Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Image Analysis Image Analysis Lars Schmidt-Thieme Information Systems and Machine Learning Lab (ISMLL) Institute for Business Economics and Information Systems & Institute for Computer Science University
Have you ever used computer vision? How? Where? Think-Pair-Share
 Have you ever used computer vision? How? Where? Think-Pair-Share Jitendra Malik, UC Berkeley Three R s of Computer Vision Jitendra Malik, UC Berkeley Three R s of Computer Vision The classic problems of
Have you ever used computer vision? How? Where? Think-Pair-Share Jitendra Malik, UC Berkeley Three R s of Computer Vision Jitendra Malik, UC Berkeley Three R s of Computer Vision The classic problems of
Computer Vision. Marc Pollefeys Vittorio Ferrari Luc Van Gool
 Computer Vision Marc Pollefeys Vittorio Ferrari Luc Van Gool Lecturers Marc Pollefeys Vittorio Ferrari Luc Van Gool Teaching assistants Olivier Saurer Petri Tanskanen Administrivia Classes: Wed, 13-16,
Computer Vision Marc Pollefeys Vittorio Ferrari Luc Van Gool Lecturers Marc Pollefeys Vittorio Ferrari Luc Van Gool Teaching assistants Olivier Saurer Petri Tanskanen Administrivia Classes: Wed, 13-16,
Stereo Epipolar Geometry for General Cameras. Sanja Fidler CSC420: Intro to Image Understanding 1 / 33
 Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
Stereo Epipolar Geometry for General Cameras Sanja Fidler CSC420: Intro to Image Understanding 1 / 33 Stereo Epipolar geometry Case with two cameras with parallel optical axes General case Now this Sanja
TCOM 663/CFRS Intrusion Detection and Forensics Department of Electrical and Computer Engineering George Mason University Fall, 2010
 TCOM 663/CFRS 663 - Intrusion Detection and Forensics Department of Electrical and Computer Engineering George Mason University Fall, 2010 Course Syllabus Revised: June. 16, 2010. Instructor Dr. Kafi Hassan
TCOM 663/CFRS 663 - Intrusion Detection and Forensics Department of Electrical and Computer Engineering George Mason University Fall, 2010 Course Syllabus Revised: June. 16, 2010. Instructor Dr. Kafi Hassan
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Today Course overview Course organization Vectors and Matrices 2 What is computer
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Today Course overview Course organization Vectors and Matrices 2 What is computer
CSc Topics in Computer Graphics 3D Photography
 CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
CSc 83010 Topics in Computer Graphics 3D Photography Tuesdays 11:45-1:45 1:45 Room 3305 Ioannis Stamos istamos@hunter.cuny.edu Office: 1090F, Hunter North (Entrance at 69 th bw/ / Park and Lexington Avenues)
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making