Geometric Modeling Assignment 3: Discrete Differential Quantities
|
|
|
- Scarlett Wells
- 5 years ago
- Views:
Transcription
1 Geometric Modeling Assignment : Discrete Differential Quantities Acknowledgements: Julian Panetta, Olga Diamanti
")





2 Assignment (Optional) Topic: Discrete Differential Quantities with libigl Vertex Normals, Curvature, Smoothing (Tutorials ) per-face per-vertex, uniform per-vertex, quadratic fit


3 Vertex Normals uniform average area-weighted average mean-curvature based libigl tutorial #201, igl::principal_curvature PCA on k-nearest neighbors quadratic fitting on k-nearest neighbors

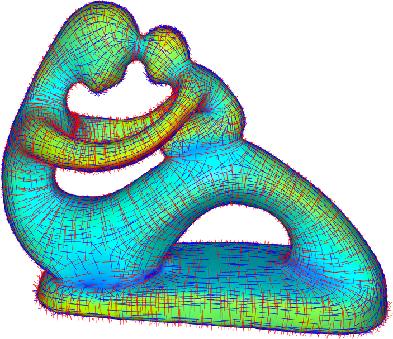
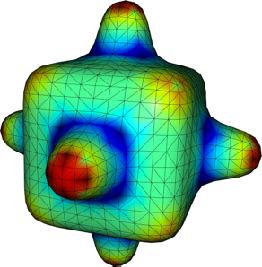
4 Curvature libigl tutorials #202, #20 min max mean gauss
k k (v i ) 2 P j Gaussian Curvature G(v i ) = j")

5 X Curvature 2 P Mean Curvature Sp = 2Hn k H(v i )=0.5kL c (v i )k k (v i ) 2 P j Gaussian Curvature G(v i ) = j A(v i ) (v j ) P j Min Curvature p apple p 1 = H + H 2 G G = apple 1 apple 2 Max Curvature p apple 1 = H H 2 p G 2H = apple 1 + apple 2
6 Data Smoothing: Grid Case Image/2D data smoothing: Filter out noise/rapid oscillations Solve the heat equation over some = f = Intuition: move toward the average of neighboring
7 Data Smoothing: = f Approach: discretize laplacian with finite differences Now we have an ordinary differential equation (ODE) Integrate (time-step) the ODE, e.g., with forward/backwards Euler
8 Data Smoothing: Surface Case Laplace-Beltrami operator lets us smooth functions on = Sf P E.g., with forward Euler (explicit smoothing) on a triangle mesh, M: f t+dt (v i )=f t (v i )+ dt f t (v M i ) 0 X = f t (v i )+ v j 2N(v i )[{v i } 1 w ij f t (v j ) A (v i ) vertices adjacent vi discrete Laplacian weights (v j )
9 Mesh Smoothing We can view the vertex positions as a (vector-valued) function to smooth! 2 f(v i )= x i y i z i 5 P Here, first-order explicit time stepping looks like: f t+dt (v i )=f t (v i )+ dt M f t (v i ) =) (v i ) vi new = v i + dt ( M v) i 0 1 X = v i + w ij v A j (v j ) v j 2N(v i )[{v i } Note: Laplacian weights generally change when mesh changes!
 matrix form: @t@t= @t @t n+1 n n n+1 n n+1 v v = dtlv v = v + dtlv p p + t p p p + t p p p + t p Discretization Discretization Discretization Intuition: vertices@f moving neighbor")
10 6 5 (I dtl)v = v Diffusion Flow Meshes Diffusion Flow on Meshes Diffusion Flow onon Meshes n+1 n ) (I + dtl)v vf (vn= n+1 n n n+1 v = v + dtlv = p = p = p Continuous Continuous In Continuous L(v) @t n+1 n n n+1 n n+1 v v = dtlv v = v + dtlv p p + t p p p + t p p p + t p Discretization Discretization Discretization Intuition: vertices@f moving neighbor i i i i i itoward i i i average. (I Explicit Smoothing n+1 v v n+1 n+1 n+1 n =n v n = (I + = 0 Iterations 0 Iterations 0 Iterations f v n+1 = (I + dtl)v = 10 Iterations Iterations 1010 Iterations 100 Iterations 100 Iterations 100 Iterations n
 2 6 5 Laplacian at next (unknown) step!")

11 6 5 Implicit Smoothing Backward Euler is more stable Take larger time steps without mesh blowing up (becoming jagged) Laplacian at next (unknown) step! v n+1 = v n + dtlv n+1 Must solve a linear system: (I dtl)v n+1 = v n libigl tutorial #205 original explicit, 1000 iterations, λ = 0.01 implicit, 1 iteration, λ = 20
12 2D Rectangular Grid Laplacian h (x j ) 20 1 X (x i ) h hf(x i ):= 1 h f(x j ) A f(x i ) 5 x j 2N(x i ) Measures difference from neighbor s average (if we divide by /h^2): 1 Weights can be represented by a stencil: 1-1 1
13 2D Rectangular Grid Laplacian 20 1 (x j ) X 1 (x i ) hf(x i ):= 1 h f(x j ) A f(x i ) x j 2N(x i ) 1 Derivation: Compute second derivatives by finite-differencing the forward difference approximation to first derivative: Sum second partial derivative approximations for each 2 2 (x, y) 1 h f(x + h, y) f(x, y) h f(x, y) f(x h, y) h f(x + h, y)+f(x h, y) 2f(x, y) = h 2 =) f(x, y) 2 (x, f y)+@2 (x, f(x + h, y)+f(x h, y)+f(x, y + h)+f(x, y h) f(x, y) h 2
= 1 @ h 2 X 1 f(x j ) A f(x i ) 5 X = f(x j ) f(x i ) x j 2N(x i ) x j 2N(x i ) This version easily generalizes to an arbitrary mesh, M: uniform X M f(v) = = v j 2N(v) 0 @ X")
14 Irregular Grid (Mesh) Laplacian First approach: umbrella operator assume all edges are unit length depends only on connectivity, not vertex locations Notice, when edge length h = 1 the 2D grid laplacian is: 20 hf(x i )= h 2 X 1 f(x j ) A f(x i ) 5 X = f(x j ) f(x i ) x j 2N(x i ) x j 2N(x i ) This version easily generalizes to an arbitrary mesh, M: uniform X M f(v) = = v j 2N(v) X v j 2N(v) f(v j ) 1 f(v j ) A f(v) N(v) f(v) #neighbors
15 Y = The Umbrella (Uniform) Laplacian In Matrix Form: 2 6 f(v 1 ) f(v 2 ) f(v ) f(v N ) 5 w ij = 8 >< 2 6 L = 8 < : uniform M f(v) = 6 X 5 Y = LF w 11 w 12 w 1N w 21 w 22 w 2N w N1 w N2 w NN 8 < = {w ij} 0 i 6= edge (i, j) 1 i 6= j, 9 edge (i, j) N(v i ) v j 2N(v) i = j 1 f(v j ) A N(v) f(v) F = f(v 1 ) f(v 2 ) f(v ) 5 f(v N ) 5
 X v i 2N(v) (cot( i ) + cot( i ))")


16 The Cotangent Laplacian cotan f(v) = 1 M 2A(v) X v i 2N(v) (cot( i ) + cot( i )) f(v i ) f(v) Accounts for edges differing lengths. Converges to the continuous Laplace-Beltrami operator S with mesh refinement Derivation in next recitation lecture.
17 The Cotangent Laplacian Y = In Matrix Form: 2 6 f(v 1 ) f(v 2 ) f(v ) f(v N ) cotan f(v) = 1 M 2A(v) 5 L = w ij = >< >: Y = LF w 11 w 12 w 1N w 21 w 22 w 2N < : w N1 w N2 w NN 8 < 5 5 = {w ij} 0 i 6= edge (i, j) cot j +cot j i 6= j, 9 edge (i, j) 2A(v P i ) i = j v k 2N(v i ) X v i 2N(v) w ik (cot( i ) + cot( i )) 2 F = f(v i ) f(v 1 ) f(v 2 ) f(v ) 5 f(v N ) 5 f(v)
18 Eigen Sparse Matrix Full-sized Laplacian can be huge for large meshes but most elements are zero! Instead, only store non-zero elements: Sparse Matrix #include <Eigen/Sparse> Eigen::SparseMatrix<double> Laplacian;
19 Eigen Sparse Matrix How to construct a sparse matrix in Eigen: //declare size of matrix L = SparseMatrix<double> (V.rows(), V.rows()); //declare list of non-zero elements (row, column, value) std::vector<eigen::triplet<double> > tripletlist; //insert element to the list //if multiple triplets exist with the same row and column, values will be *added* tripletlist.push_back(eigen::triplet<double>(source,dest,c(i,e))); //construct matrix from the list L.setFromTriplets(tripletList.begin(), tripletlist.end()); see igl::cotmatrix (V,F)
20 How to build cotangent matrix cotan f(v) = 1 M 2A(v) X v i 2N(v) Iterating over vertices is slow (cot( i ) + cot( i )) f(v i ) f(v) Instead, iterate over faces and add cot terms to the vertices incident each face edge for i = 1:number_of_faces for j = 1:face_valence source_vertex = faces(i,j); destination_vertex = faces(i,(j+1) % face_valence); weight =...; //laplacian weight for edge (source_vertex, destination_vertex)(cotan or uniform) Laplacian(source_vertex, destination_vertex) += weight; Laplacian(destination_vertex, source_vertex) += weight; Laplacian(destination_vertex, destination_vertex) -= weight; Laplacian(source_vertex, source_vertex) -= weight; end end
21 Averaged or Summed? We ll see next time that the cotan laplacian we introduced: cotan M f(v) = 1 2A(v) X v i 2N(v) (cot( i ) + cot( i )) f(v i ) f(v) computes the average Laplacian over some area A around v (hence the division by A) This gives an asymmetric matrix. But if we instead compute the summed laplacian (i.e., don t divide by A), we end up with a symmetric matrix. This summed, symmetric Laplacian is more standard in the finite element community, M = and is related to our Laplacian by a lumped (diagonal) mass matrix holding the areas: 2 6 lumped mass matrix (averaging region areas) A(0) A(1) A(N) 5 (L averaged corresponds to formula above) L averaged = M 1 L summed [L summed ] ij = 8 1 >< 2 cot( ij ) + cot( ij ) if j 2 N(i) P j2n(i) >: [Lsummed ] ij if i = j 0 otherwise
22 Averaged or Summed? Suppose we have a linear system: L averaged x = b i.e. using the asymmetric cotangent Laplacian we introduced earlier. Right hand side vector b represents a scalar field, storing the desired Laplacian value (not the summed value!) at each vertex. Solving symmetric sparse linear systems matrices is much more efficient, so we prefer to solve with the summed quantities: ML averaged x = L summed x = Mb

23 How to compute A(v) Barycentric area Connect edge midpoints and triangle barycenters Each of the incident triangles contributes 1/ of its area to all its vertices, regardless of the placement + Simple to compute + Always positive weights - Heavily connectivity-dependent - Changes if edges are flipped
24 How to compute A(v) Voronoi area Connect edge midpoints and triangle circumcenters The resulting quadrilaterals are not equareal Sum contributions from incident triangles + Only depends on vertex positioning - More complicated computations

25 How to compute A(v) Voronoi area Connect edge midpoints and triangle circumcenters The resulting quadrilaterals are not equiareal Sum contributions from incident triangles For obtuse triangles, circumcenter is outside the triangle -> negative areas! + Only depends on vertex positioning - More complicated computation - May introduce negative weights (obtuse triangles)
26 How to compute A(v) Voronoi area - compromise Connect edge midpoints with: triangle circumcenters, for non-obtuse triangles midpoint of opposite edge, for obtuse ones Sum contributions from incident triangles + Only depends on vertex positioning - More complicated computations
27 Linear Systems with Eigen #include <Eigen/SparseCholesky> //... SparseMatrix<double> A; // fill A VectorXd b, x; // fill b // solve Ax = b SimplicialLDLt<SparseMatrix<double> > solver; solver.compute(a); if(solver.info()!=success) return; // decomposition failed x = solver.solve(b); if(solver.info()!=success) return; // solving failed // solve for another right hand side: x1 = solver.solve(b1); Cholesky factorization works only for symmetric, positive definite A! Other solvers available, e.g. SparseLU:
28 Questions?
Shape Modeling and Geometry Processing
 252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
252-0538-00L, Spring 2018 Shape Modeling and Geometry Processing Discrete Differential Geometry Differential Geometry Motivation Formalize geometric properties of shapes Roi Poranne # 2 Differential Geometry
1.7.1 Laplacian Smoothing
 1.7.1 Laplacian Smoothing 320491: Advanced Graphics - Chapter 1 434 Theory Minimize energy functional total curvature estimate by polynomial-fitting non-linear (very slow!) 320491: Advanced Graphics -
1.7.1 Laplacian Smoothing 320491: Advanced Graphics - Chapter 1 434 Theory Minimize energy functional total curvature estimate by polynomial-fitting non-linear (very slow!) 320491: Advanced Graphics -
05 - Surfaces. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Daniele Panozzo
 05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
05 - Surfaces Acknowledgements: Olga Sorkine-Hornung Reminder Curves Turning Number Theorem Continuous world Discrete world k: Curvature is scale dependent is scale-independent Discrete Curvature Integrated
Geometric Modeling Assignment 5: Shape Deformation
 Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Geometric Modeling Assignment 5: Shape Deformation Acknowledgements: Olga Diamanti, Julian Panetta Shape Deformation Step 1: Select and Deform Handle Regions Draw vertex selection with mouse H 2 Move one
Lectures in Discrete Differential Geometry 3 Discrete Surfaces
 Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Lectures in Discrete Differential Geometry 3 Discrete Surfaces Etienne Vouga March 19, 2014 1 Triangle Meshes We will now study discrete surfaces and build up a parallel theory of curvature that mimics
Smoothing & Fairing. Mario Botsch
 Smoothing & Fairing Mario Botsch Motivation Filter out high frequency noise Desbrun, Meyer, Schroeder, Barr: Implicit Fairing of Irregular Meshes using Diffusion and Curvature Flow, SIGGRAPH 99 2 Motivation
Smoothing & Fairing Mario Botsch Motivation Filter out high frequency noise Desbrun, Meyer, Schroeder, Barr: Implicit Fairing of Irregular Meshes using Diffusion and Curvature Flow, SIGGRAPH 99 2 Motivation
Geodesics in heat: A new approach to computing distance
 Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Geodesics in heat: A new approach to computing distance based on heat flow Diana Papyan Faculty of Informatics - Technische Universität München Abstract In this report we are going to introduce new method
Assignment 5: Shape Deformation
 CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
CSCI-GA.3033-018 - Geometric Modeling Assignment 5: Shape Deformation Goal of this exercise In this exercise, you will implement an algorithm to interactively deform 3D models. You will construct a two-level
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 4. Geometric Registration 4.1 Rigid Registration Range Scanning: Reconstruction Set of raw scans Reconstructed
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 4. Geometric Registration 4.1 Rigid Registration Range Scanning: Reconstruction Set of raw scans Reconstructed
(Discrete) Differential Geometry
 Differential Geometry") (Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
(Discrete) Differential Geometry Motivation Understand the structure of the surface Properties: smoothness, curviness, important directions How to modify the surface to change these properties What properties
Contents. I The Basic Framework for Stationary Problems 1
 page v Preface xiii I The Basic Framework for Stationary Problems 1 1 Some model PDEs 3 1.1 Laplace s equation; elliptic BVPs... 3 1.1.1 Physical experiments modeled by Laplace s equation... 5 1.2 Other
page v Preface xiii I The Basic Framework for Stationary Problems 1 1 Some model PDEs 3 1.1 Laplace s equation; elliptic BVPs... 3 1.1.1 Physical experiments modeled by Laplace s equation... 5 1.2 Other
Parameterization of Meshes
 2-Manifold Parameterization of Meshes What makes for a smooth manifold? locally looks like Euclidian space collection of charts mutually compatible on their overlaps form an atlas Parameterizations are
2-Manifold Parameterization of Meshes What makes for a smooth manifold? locally looks like Euclidian space collection of charts mutually compatible on their overlaps form an atlas Parameterizations are
AMS527: Numerical Analysis II
 AMS527: Numerical Analysis II A Brief Overview of Finite Element Methods Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao SUNY Stony Brook AMS527: Numerical Analysis II 1 / 25 Overview Basic concepts Mathematical
AMS527: Numerical Analysis II A Brief Overview of Finite Element Methods Xiangmin Jiao SUNY Stony Brook Xiangmin Jiao SUNY Stony Brook AMS527: Numerical Analysis II 1 / 25 Overview Basic concepts Mathematical
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
THIS paper presents the recent advances in mesh deformation
 1 On Linear Variational Surface Deformation Methods Mario Botsch Computer Graphics Laboratory ETH Zurich Olga Sorkine Computer Graphics Group TU Berlin Abstract This survey reviews the recent advances
1 On Linear Variational Surface Deformation Methods Mario Botsch Computer Graphics Laboratory ETH Zurich Olga Sorkine Computer Graphics Group TU Berlin Abstract This survey reviews the recent advances
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 2 Don t you just invert
CS 468 (Spring 2013) Discrete Differential Geometry
 Discrete Differential Geometry") CS 468 (Spring 2013) Discrete Differential Geometry 1 Math Review Lecture 14 15 May 2013 Discrete Exterior Calculus Lecturer: Justin Solomon Scribe: Cassidy Saenz Before we dive into Discrete Exterior
CS 468 (Spring 2013) Discrete Differential Geometry 1 Math Review Lecture 14 15 May 2013 Discrete Exterior Calculus Lecturer: Justin Solomon Scribe: Cassidy Saenz Before we dive into Discrete Exterior
Laplacian Operator and Smoothing
 Laplacian Operator and Smoothing Xifeng Gao Acknowledgements for the slides: Olga Sorkine-Hornung, Mario Botsch, and Daniele Panozzo Applications in Geometry Processing Smoothing Parameterization Remeshing
Laplacian Operator and Smoothing Xifeng Gao Acknowledgements for the slides: Olga Sorkine-Hornung, Mario Botsch, and Daniele Panozzo Applications in Geometry Processing Smoothing Parameterization Remeshing
CS 523: Computer Graphics, Spring Shape Modeling. Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
CS 523: Computer Graphics, Spring 2011 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2011 2/22/2011 Differential Geometry of Surfaces Continuous and Discrete Motivation Smoothness
Surface Parameterization
 Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Surface Parameterization A Tutorial and Survey Michael Floater and Kai Hormann Presented by Afra Zomorodian CS 468 10/19/5 1 Problem 1-1 mapping from domain to surface Original application: Texture mapping
Assignment 4: Mesh Parametrization
 CSCI-GA.3033-018 - Geometric Modeling Assignment 4: Mesh Parametrization In this exercise you will Familiarize yourself with vector field design on surfaces. Create scalar fields whose gradients align
CSCI-GA.3033-018 - Geometric Modeling Assignment 4: Mesh Parametrization In this exercise you will Familiarize yourself with vector field design on surfaces. Create scalar fields whose gradients align
What is Multigrid? They have been extended to solve a wide variety of other problems, linear and nonlinear.
 AMSC 600/CMSC 760 Fall 2007 Solution of Sparse Linear Systems Multigrid, Part 1 Dianne P. O Leary c 2006, 2007 What is Multigrid? Originally, multigrid algorithms were proposed as an iterative method to
AMSC 600/CMSC 760 Fall 2007 Solution of Sparse Linear Systems Multigrid, Part 1 Dianne P. O Leary c 2006, 2007 What is Multigrid? Originally, multigrid algorithms were proposed as an iterative method to
The 3D DSC in Fluid Simulation
 The 3D DSC in Fluid Simulation Marek K. Misztal Informatics and Mathematical Modelling, Technical University of Denmark mkm@imm.dtu.dk DSC 2011 Workshop Kgs. Lyngby, 26th August 2011 Governing Equations
The 3D DSC in Fluid Simulation Marek K. Misztal Informatics and Mathematical Modelling, Technical University of Denmark mkm@imm.dtu.dk DSC 2011 Workshop Kgs. Lyngby, 26th August 2011 Governing Equations
Mesh data structures. Abstract. 1 Introduction. 2 Method. 2.1 Implement the half edge mesh LIU TNM
 Mesh data structures Fredrik Salomonsson fresa517@student.liu.se LIU TNM079 2010-05-28 Abstract When dealing with meshes containing large amount of triangles or quadrilaterals one need to have some kind
Mesh data structures Fredrik Salomonsson fresa517@student.liu.se LIU TNM079 2010-05-28 Abstract When dealing with meshes containing large amount of triangles or quadrilaterals one need to have some kind
Scanning Real World Objects without Worries 3D Reconstruction
 Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
Scanning Real World Objects without Worries 3D Reconstruction 1. Overview Feng Li 308262 Kuan Tian 308263 This document is written for the 3D reconstruction part in the course Scanning real world objects
(Sparse) Linear Solvers
 Linear Solvers") (Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
(Sparse) Linear Solvers Ax = B Why? Many geometry processing applications boil down to: solve one or more linear systems Parameterization Editing Reconstruction Fairing Morphing 1 Don t you just invert
04 - Normal Estimation, Curves
 04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
04 - Normal Estimation, Curves Acknowledgements: Olga Sorkine-Hornung Normal Estimation Implicit Surface Reconstruction Implicit function from point clouds Need consistently oriented normals < 0 0 > 0
Mesh Processing Pipeline
 Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Mesh Smoothing 1 Mesh Processing Pipeline... Scan Reconstruct Clean Remesh 2 Mesh Quality Visual inspection of sensitive attributes Specular shading Flat Shading Gouraud Shading Phong Shading 3 Mesh Quality
Geometric Modeling in Graphics
 Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
Geometric Modeling in Graphics Part 10: Surface reconstruction Martin Samuelčík www.sccg.sk/~samuelcik samuelcik@sccg.sk Curve, surface reconstruction Finding compact connected orientable 2-manifold surface
1 2 (3 + x 3) x 2 = 1 3 (3 + x 1 2x 3 ) 1. 3 ( 1 x 2) (3 + x(0) 3 ) = 1 2 (3 + 0) = 3. 2 (3 + x(0) 1 2x (0) ( ) = 1 ( 1 x(0) 2 ) = 1 3 ) = 1 3
 x 2 = 1 3 (3 + x 1 2x 3 ) 1. 3 ( 1 x 2) (3 + x(0) 3 ) = 1 2 (3 + 0) = 3. 2 (3 + x(0) 1 2x (0) ( ) = 1 ( 1 x(0) 2 ) = 1 3 ) = 1 3") 6 Iterative Solvers Lab Objective: Many real-world problems of the form Ax = b have tens of thousands of parameters Solving such systems with Gaussian elimination or matrix factorizations could require
6 Iterative Solvers Lab Objective: Many real-world problems of the form Ax = b have tens of thousands of parameters Solving such systems with Gaussian elimination or matrix factorizations could require
Simple Mesh Examples to Illustrate Specific Finite Element Mesh Requirements
 Simple Mesh Examples to Illustrate Specific Finite Element Mesh Requirements Peter Fleischmann, Robert Kosik, Bernhard Haindl, and Siegfried Selberherr Institute for Microelectronics, TU Vienna, Gu6hausstrafie
Simple Mesh Examples to Illustrate Specific Finite Element Mesh Requirements Peter Fleischmann, Robert Kosik, Bernhard Haindl, and Siegfried Selberherr Institute for Microelectronics, TU Vienna, Gu6hausstrafie
Lecture 2 Unstructured Mesh Generation
 Lecture 2 Unstructured Mesh Generation MIT 16.930 Advanced Topics in Numerical Methods for Partial Differential Equations Per-Olof Persson (persson@mit.edu) February 13, 2006 1 Mesh Generation Given a
Lecture 2 Unstructured Mesh Generation MIT 16.930 Advanced Topics in Numerical Methods for Partial Differential Equations Per-Olof Persson (persson@mit.edu) February 13, 2006 1 Mesh Generation Given a
Chapter 13. Boundary Value Problems for Partial Differential Equations* Linz 2002/ page
 Chapter 13 Boundary Value Problems for Partial Differential Equations* E lliptic equations constitute the third category of partial differential equations. As a prototype, we take the Poisson equation
Chapter 13 Boundary Value Problems for Partial Differential Equations* E lliptic equations constitute the third category of partial differential equations. As a prototype, we take the Poisson equation
Laplacian Meshes. COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman
 Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
Laplacian Meshes COS 526 Fall 2016 Slides from Olga Sorkine and Yaron Lipman Outline Differential surface representation Ideas and applications Compact shape representation Mesh editing and manipulation
CS 523: Computer Graphics, Spring Differential Geometry of Surfaces
 CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
CS 523: Computer Graphics, Spring 2009 Shape Modeling Differential Geometry of Surfaces Andrew Nealen, Rutgers, 2009 3/4/2009 Recap Differential Geometry of Curves Andrew Nealen, Rutgers, 2009 3/4/2009
Contents. F10: Parallel Sparse Matrix Computations. Parallel algorithms for sparse systems Ax = b. Discretized domain a metal sheet
 Contents 2 F10: Parallel Sparse Matrix Computations Figures mainly from Kumar et. al. Introduction to Parallel Computing, 1st ed Chap. 11 Bo Kågström et al (RG, EE, MR) 2011-05-10 Sparse matrices and storage
Contents 2 F10: Parallel Sparse Matrix Computations Figures mainly from Kumar et. al. Introduction to Parallel Computing, 1st ed Chap. 11 Bo Kågström et al (RG, EE, MR) 2011-05-10 Sparse matrices and storage
A new 8-node quadrilateral spline finite element
 Journal of Computational and Applied Mathematics 195 (2006) 54 65 www.elsevier.com/locate/cam A new 8-node quadrilateral spline finite element Chong-Jun Li, Ren-Hong Wang Institute of Mathematical Sciences,
Journal of Computational and Applied Mathematics 195 (2006) 54 65 www.elsevier.com/locate/cam A new 8-node quadrilateral spline finite element Chong-Jun Li, Ren-Hong Wang Institute of Mathematical Sciences,
Finite difference methods
 Finite difference methods Siltanen/Railo/Kaarnioja Spring 8 Applications of matrix computations Applications of matrix computations Finite difference methods Spring 8 / Introduction Finite difference methods
Finite difference methods Siltanen/Railo/Kaarnioja Spring 8 Applications of matrix computations Applications of matrix computations Finite difference methods Spring 8 / Introduction Finite difference methods
SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS
 SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS JIAN LIANG AND HONGKAI ZHAO Abstract. In this paper we present a general framework for solving partial differential equations on manifolds represented
SOLVING PARTIAL DIFFERENTIAL EQUATIONS ON POINT CLOUDS JIAN LIANG AND HONGKAI ZHAO Abstract. In this paper we present a general framework for solving partial differential equations on manifolds represented
The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a
 The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a coordinate system and then the measuring of the point with
The goal is the definition of points with numbers and primitives with equations or functions. The definition of points with numbers requires a coordinate system and then the measuring of the point with
Numerical Algorithms
 Chapter 10 Slide 464 Numerical Algorithms Slide 465 Numerical Algorithms In textbook do: Matrix multiplication Solving a system of linear equations Slide 466 Matrices A Review An n m matrix Column a 0,0
Chapter 10 Slide 464 Numerical Algorithms Slide 465 Numerical Algorithms In textbook do: Matrix multiplication Solving a system of linear equations Slide 466 Matrices A Review An n m matrix Column a 0,0
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras. Lecture - 36
 Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Lecture - 36 In last class, we have derived element equations for two d elasticity problems
Finite Element Analysis Prof. Dr. B. N. Rao Department of Civil Engineering Indian Institute of Technology, Madras Lecture - 36 In last class, we have derived element equations for two d elasticity problems
SHORTEST PATHS ON SURFACES GEODESICS IN HEAT
 SHORTEST PATHS ON SURFACES GEODESICS IN HEAT INF555 Digital Representation and Analysis of Shapes 28 novembre 2015 Ruoqi He & Chia-Man Hung 1 INTRODUCTION In this project we present the algorithm of a
SHORTEST PATHS ON SURFACES GEODESICS IN HEAT INF555 Digital Representation and Analysis of Shapes 28 novembre 2015 Ruoqi He & Chia-Man Hung 1 INTRODUCTION In this project we present the algorithm of a
Large Mesh Deformation Using the Volumetric Graph Laplacian
 Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU /858B Fall 2017
 DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B Fall 2017 LECTURE 10: DISCRETE CURVATURE DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B
DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B Fall 2017 LECTURE 10: DISCRETE CURVATURE DISCRETE DIFFERENTIAL GEOMETRY: AN APPLIED INTRODUCTION Keenan Crane CMU 15-458/858B
Spectral Compression of Mesh Geometry
 Spectral Compression of Mesh Geometry Zachi Karni, Craig Gotsman SIGGRAPH 2000 1 Introduction Thus far, topology coding drove geometry coding. Geometric data contains far more information (15 vs. 3 bits/vertex).
Spectral Compression of Mesh Geometry Zachi Karni, Craig Gotsman SIGGRAPH 2000 1 Introduction Thus far, topology coding drove geometry coding. Geometric data contains far more information (15 vs. 3 bits/vertex).
Parallel Implementations of Gaussian Elimination
 s of Western Michigan University vasilije.perovic@wmich.edu January 27, 2012 CS 6260: in Parallel Linear systems of equations General form of a linear system of equations is given by a 11 x 1 + + a 1n
s of Western Michigan University vasilije.perovic@wmich.edu January 27, 2012 CS 6260: in Parallel Linear systems of equations General form of a linear system of equations is given by a 11 x 1 + + a 1n
Estimating affine-invariant structures on triangle meshes
 Estimating affine-invariant structures on triangle meshes Thales Vieira Mathematics, UFAL Dimas Martinez Mathematics, UFAM Maria Andrade Mathematics, UFS Thomas Lewiner École Polytechnique Invariant descriptors
Estimating affine-invariant structures on triangle meshes Thales Vieira Mathematics, UFAL Dimas Martinez Mathematics, UFAM Maria Andrade Mathematics, UFS Thomas Lewiner École Polytechnique Invariant descriptors
CS 140: Sparse Matrix-Vector Multiplication and Graph Partitioning
 CS 140: Sparse Matrix-Vector Multiplication and Graph Partitioning Parallel sparse matrix-vector product Lay out matrix and vectors by rows y(i) = sum(a(i,j)*x(j)) Only compute terms with A(i,j) 0 P0 P1
CS 140: Sparse Matrix-Vector Multiplication and Graph Partitioning Parallel sparse matrix-vector product Lay out matrix and vectors by rows y(i) = sum(a(i,j)*x(j)) Only compute terms with A(i,j) 0 P0 P1
Introduction to Multigrid and its Parallelization
 Introduction to Multigrid and its Parallelization! Thomas D. Economon Lecture 14a May 28, 2014 Announcements 2 HW 1 & 2 have been returned. Any questions? Final projects are due June 11, 5 pm. If you are
Introduction to Multigrid and its Parallelization! Thomas D. Economon Lecture 14a May 28, 2014 Announcements 2 HW 1 & 2 have been returned. Any questions? Final projects are due June 11, 5 pm. If you are
Easy modeling generate new shapes by deforming existing ones
 Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Deformation I Deformation Motivation Easy modeling generate new shapes by deforming existing ones Motivation Easy modeling generate new shapes by deforming existing ones Motivation Character posing for
Multigrid Pattern. I. Problem. II. Driving Forces. III. Solution
 Multigrid Pattern I. Problem Problem domain is decomposed into a set of geometric grids, where each element participates in a local computation followed by data exchanges with adjacent neighbors. The grids
Multigrid Pattern I. Problem Problem domain is decomposed into a set of geometric grids, where each element participates in a local computation followed by data exchanges with adjacent neighbors. The grids
Parallel Computation of Spherical Parameterizations for Mesh Analysis. Th. Athanasiadis and I. Fudos University of Ioannina, Greece
 Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Parallel Computation of Spherical Parameterizations for Mesh Analysis Th. Athanasiadis and I. Fudos, Greece Introduction Mesh parameterization is a powerful geometry processing tool Applications Remeshing
Computational Fluid Dynamics - Incompressible Flows
 Computational Fluid Dynamics - Incompressible Flows March 25, 2008 Incompressible Flows Basis Functions Discrete Equations CFD - Incompressible Flows CFD is a Huge field Numerical Techniques for solving
Computational Fluid Dynamics - Incompressible Flows March 25, 2008 Incompressible Flows Basis Functions Discrete Equations CFD - Incompressible Flows CFD is a Huge field Numerical Techniques for solving
Subdivision Curves and Surfaces
 Subdivision Surfaces or How to Generate a Smooth Mesh?? Subdivision Curves and Surfaces Subdivision given polyline(2d)/mesh(3d) recursively modify & add vertices to achieve smooth curve/surface Each iteration
Subdivision Surfaces or How to Generate a Smooth Mesh?? Subdivision Curves and Surfaces Subdivision given polyline(2d)/mesh(3d) recursively modify & add vertices to achieve smooth curve/surface Each iteration
CS 177 Homework 1. Julian Panetta. October 22, We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F:
 CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
CS 177 Homework 1 Julian Panetta October, 009 1 Euler Characteristic 1.1 Polyhedral Formula We want to show for any polygonal disk consisting of vertex set V, edge set E, and face set F: V E + F = 1 First,
Semester Final Report
 CSUMS SemesterFinalReport InLaTex AnnKimball 5/20/2009 ThisreportisageneralsummaryoftheaccumulationofknowledgethatIhavegatheredthroughoutthis semester. I was able to get a birds eye view of many different
CSUMS SemesterFinalReport InLaTex AnnKimball 5/20/2009 ThisreportisageneralsummaryoftheaccumulationofknowledgethatIhavegatheredthroughoutthis semester. I was able to get a birds eye view of many different
Lecture 3: Camera Calibration, DLT, SVD
 Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
Computer Vision Lecture 3 23--28 Lecture 3: Camera Calibration, DL, SVD he Inner Parameters In this section we will introduce the inner parameters of the cameras Recall from the camera equations λx = P
THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION
 THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION Dan Englesson danen344@student.liu.se Sunday 12th April, 2011 Abstract In this lab assignment which was done in the course TNM079, Modeling and animation,
THE HALF-EDGE DATA STRUCTURE MODELING AND ANIMATION Dan Englesson danen344@student.liu.se Sunday 12th April, 2011 Abstract In this lab assignment which was done in the course TNM079, Modeling and animation,
Advanced Computer Architecture Lab 3 Scalability of the Gauss-Seidel Algorithm
 Advanced Computer Architecture Lab 3 Scalability of the Gauss-Seidel Algorithm Andreas Sandberg 1 Introduction The purpose of this lab is to: apply what you have learned so
Advanced Computer Architecture Lab 3 Scalability of the Gauss-Seidel Algorithm Andreas Sandberg 1 Introduction The purpose of this lab is to: apply what you have learned so
Shape Modeling and Geometry Processing Exercise 1: libigl Hello World
 Shape Modeling and Geometry Processing Exercise 1: libigl Hello World Acknowledgments: Olga Diamanti, Julian Panetta Exercise 1 - libigl Hello World! Experiment with the geometry processing library Exercise
Shape Modeling and Geometry Processing Exercise 1: libigl Hello World Acknowledgments: Olga Diamanti, Julian Panetta Exercise 1 - libigl Hello World! Experiment with the geometry processing library Exercise
Digital Geometry Processing. Computer Graphics CMU /15-662
 Digital Geometry Processing Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans, not fins
Digital Geometry Processing Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans, not fins
Robot Mapping. Least Squares Approach to SLAM. Cyrill Stachniss
 Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Robot Mapping Least Squares Approach to SLAM Cyrill Stachniss 1 Three Main SLAM Paradigms Kalman filter Particle filter Graphbased least squares approach to SLAM 2 Least Squares in General Approach for
Graphbased. Kalman filter. Particle filter. Three Main SLAM Paradigms. Robot Mapping. Least Squares Approach to SLAM. Least Squares in General
 Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Robot Mapping Three Main SLAM Paradigms Least Squares Approach to SLAM Kalman filter Particle filter Graphbased Cyrill Stachniss least squares approach to SLAM 1 2 Least Squares in General! Approach for
Why Use the GPU? How to Exploit? New Hardware Features. Sparse Matrix Solvers on the GPU: Conjugate Gradients and Multigrid. Semiconductor trends
 Imagine stream processor; Bill Dally, Stanford Connection Machine CM; Thinking Machines Sparse Matrix Solvers on the GPU: Conjugate Gradients and Multigrid Jeffrey Bolz Eitan Grinspun Caltech Ian Farmer
Imagine stream processor; Bill Dally, Stanford Connection Machine CM; Thinking Machines Sparse Matrix Solvers on the GPU: Conjugate Gradients and Multigrid Jeffrey Bolz Eitan Grinspun Caltech Ian Farmer
Development of a Maxwell Equation Solver for Application to Two Fluid Plasma Models. C. Aberle, A. Hakim, and U. Shumlak
 Development of a Maxwell Equation Solver for Application to Two Fluid Plasma Models C. Aberle, A. Hakim, and U. Shumlak Aerospace and Astronautics University of Washington, Seattle American Physical Society
Development of a Maxwell Equation Solver for Application to Two Fluid Plasma Models C. Aberle, A. Hakim, and U. Shumlak Aerospace and Astronautics University of Washington, Seattle American Physical Society
Numerical Analysis I - Final Exam Matrikelnummer:
 Dr. Behrens Center for Mathematical Sciences Technische Universität München Winter Term 2005/2006 Name: Numerical Analysis I - Final Exam Matrikelnummer: I agree to the publication of the results of this
Dr. Behrens Center for Mathematical Sciences Technische Universität München Winter Term 2005/2006 Name: Numerical Analysis I - Final Exam Matrikelnummer: I agree to the publication of the results of this
Dual Interpolants for Finite Element Methods
 Dual Interpolants for Finite Element Methods Andrew Gillette joint work with Chandrajit Bajaj and Alexander Rand Department of Mathematics Institute of Computational Engineering and Sciences University
Dual Interpolants for Finite Element Methods Andrew Gillette joint work with Chandrajit Bajaj and Alexander Rand Department of Mathematics Institute of Computational Engineering and Sciences University
High Performance Computing: Tools and Applications
 High Performance Computing: Tools and Applications Edmond Chow School of Computational Science and Engineering Georgia Institute of Technology Lecture 15 Numerically solve a 2D boundary value problem Example:
High Performance Computing: Tools and Applications Edmond Chow School of Computational Science and Engineering Georgia Institute of Technology Lecture 15 Numerically solve a 2D boundary value problem Example:
Comparison of different solvers for two-dimensional steady heat conduction equation ME 412 Project 2
 Comparison of different solvers for two-dimensional steady heat conduction equation ME 412 Project 2 Jingwei Zhu March 19, 2014 Instructor: Surya Pratap Vanka 1 Project Description The purpose of this
Comparison of different solvers for two-dimensional steady heat conduction equation ME 412 Project 2 Jingwei Zhu March 19, 2014 Instructor: Surya Pratap Vanka 1 Project Description The purpose of this
Geometry Processing & Geometric Queries. Computer Graphics CMU /15-662
 Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Geometry Processing & Geometric Queries Computer Graphics CMU 15-462/15-662 Last time: Meshes & Manifolds Mathematical description of geometry - simplifying assumption: manifold - for polygon meshes: fans,
Simulation in Computer Graphics. Deformable Objects. Matthias Teschner. Computer Science Department University of Freiburg
 Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Simulation in Computer Graphics Deformable Objects Matthias Teschner Computer Science Department University of Freiburg Outline introduction forces performance collision handling visualization University
Computing and Processing Correspondences with Functional Maps
 Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Computing and Processing Correspondences with Functional Maps SIGGRAPH 2017 course Maks Ovsjanikov, Etienne Corman, Michael Bronstein, Emanuele Rodolà, Mirela Ben-Chen, Leonidas Guibas, Frederic Chazal,
Surfaces, meshes, and topology
 Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
Surfaces from Point Samples Surfaces, meshes, and topology A surface is a 2-manifold embedded in 3- dimensional Euclidean space Such surfaces are often approximated by triangle meshes 2 1 Triangle mesh
SELECTIVE ALGEBRAIC MULTIGRID IN FOAM-EXTEND
 Student Submission for the 5 th OpenFOAM User Conference 2017, Wiesbaden - Germany: SELECTIVE ALGEBRAIC MULTIGRID IN FOAM-EXTEND TESSA UROIĆ Faculty of Mechanical Engineering and Naval Architecture, Ivana
Student Submission for the 5 th OpenFOAM User Conference 2017, Wiesbaden - Germany: SELECTIVE ALGEBRAIC MULTIGRID IN FOAM-EXTEND TESSA UROIĆ Faculty of Mechanical Engineering and Naval Architecture, Ivana
INF3320 Computer Graphics and Discrete Geometry
 INF3320 Computer Graphics and Discrete Geometry More smooth Curves and Surfaces Christopher Dyken, Michael Floater and Martin Reimers 10.11.2010 Page 1 More smooth Curves and Surfaces Akenine-Möller, Haines
INF3320 Computer Graphics and Discrete Geometry More smooth Curves and Surfaces Christopher Dyken, Michael Floater and Martin Reimers 10.11.2010 Page 1 More smooth Curves and Surfaces Akenine-Möller, Haines
Iterative Algorithms I: Elementary Iterative Methods and the Conjugate Gradient Algorithms
 Iterative Algorithms I: Elementary Iterative Methods and the Conjugate Gradient Algorithms By:- Nitin Kamra Indian Institute of Technology, Delhi Advisor:- Prof. Ulrich Reude 1. Introduction to Linear
Iterative Algorithms I: Elementary Iterative Methods and the Conjugate Gradient Algorithms By:- Nitin Kamra Indian Institute of Technology, Delhi Advisor:- Prof. Ulrich Reude 1. Introduction to Linear
Numerical Methods for PDEs. SSC Workgroup Meetings Juan J. Alonso October 8, SSC Working Group Meetings, JJA 1
 Numerical Methods for PDEs SSC Workgroup Meetings Juan J. Alonso October 8, 2001 SSC Working Group Meetings, JJA 1 Overview These notes are meant to be an overview of the various memory access patterns
Numerical Methods for PDEs SSC Workgroup Meetings Juan J. Alonso October 8, 2001 SSC Working Group Meetings, JJA 1 Overview These notes are meant to be an overview of the various memory access patterns
Solving Sparse Linear Systems. Forward and backward substitution for solving lower or upper triangular systems
 AMSC 6 /CMSC 76 Advanced Linear Numerical Analysis Fall 7 Direct Solution of Sparse Linear Systems and Eigenproblems Dianne P. O Leary c 7 Solving Sparse Linear Systems Assumed background: Gauss elimination
AMSC 6 /CMSC 76 Advanced Linear Numerical Analysis Fall 7 Direct Solution of Sparse Linear Systems and Eigenproblems Dianne P. O Leary c 7 Solving Sparse Linear Systems Assumed background: Gauss elimination
A Primer on Laplacians. Max Wardetzky. Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany
 A Primer on Laplacians Max Wardetzky Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany Warm-up: Euclidean case Warm-up The Euclidean case Chladni s vibrating plates
A Primer on Laplacians Max Wardetzky Institute for Numerical and Applied Mathematics Georg-August Universität Göttingen, Germany Warm-up: Euclidean case Warm-up The Euclidean case Chladni s vibrating plates
Ordinary Differential Equation (ODE)
") Ordinary Differential Equation (ODE) INTRODUCTION: Ordinary Differential Equations play an important role in different branches of science and technology In the practical field of application problems
Ordinary Differential Equation (ODE) INTRODUCTION: Ordinary Differential Equations play an important role in different branches of science and technology In the practical field of application problems
Efficient Minimization of New Quadric Metric for Simplifying Meshes with Appearance Attributes
 Efficient Minimization of New Quadric Metric for Simplifying Meshes with Appearance Attributes (Addendum to IEEE Visualization 1999 paper) Hugues Hoppe Steve Marschner June 2000 Technical Report MSR-TR-2000-64
Efficient Minimization of New Quadric Metric for Simplifying Meshes with Appearance Attributes (Addendum to IEEE Visualization 1999 paper) Hugues Hoppe Steve Marschner June 2000 Technical Report MSR-TR-2000-64
Discrete Exterior Calculus How to Turn Your Mesh into a Computational Structure. Discrete Differential Geometry
 Discrete Exterior Calculus How to Turn Your Mesh into a Computational Structure Discrete Differential Geometry Big Picture Deriving a whole Discrete Calculus you need first a discrete domain will induce
Discrete Exterior Calculus How to Turn Your Mesh into a Computational Structure Discrete Differential Geometry Big Picture Deriving a whole Discrete Calculus you need first a discrete domain will induce
Special Topics in Visualization
 Special Topics in Visualization Final Project Report Dual contouring of Hermite Data Submitted By S M Shahed Nejhum 8589-1199 May 19, 2008 Introduction Iso-surface extraction from 3D volumetric data is
Special Topics in Visualization Final Project Report Dual contouring of Hermite Data Submitted By S M Shahed Nejhum 8589-1199 May 19, 2008 Introduction Iso-surface extraction from 3D volumetric data is
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
A Global Laplacian Smoothing Approach with Feature Preservation
 A Global Laplacian Smoothing Approach with Feature Preservation hongping Ji Ligang Liu Guojin Wang Department of Mathematics State Key Lab of CAD&CG hejiang University Hangzhou, 310027 P.R. China jzpboy@yahoo.com.cn,
A Global Laplacian Smoothing Approach with Feature Preservation hongping Ji Ligang Liu Guojin Wang Department of Mathematics State Key Lab of CAD&CG hejiang University Hangzhou, 310027 P.R. China jzpboy@yahoo.com.cn,
ALF USER GUIDE. Date: September
 ALF USER GUIDE R. VERFÜRTH Contents 1. Introduction 1 2. User interface 2 3. Domain and initial grid 3 4. Differential equation 9 5. Discretization 12 6. Solver 12 7. Mesh refinement 14 8. Number of nodes
ALF USER GUIDE R. VERFÜRTH Contents 1. Introduction 1 2. User interface 2 3. Domain and initial grid 3 4. Differential equation 9 5. Discretization 12 6. Solver 12 7. Mesh refinement 14 8. Number of nodes
Fast marching methods
 1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
1 Fast marching methods Lecture 3 Alexander & Michael Bronstein tosca.cs.technion.ac.il/book Numerical geometry of non-rigid shapes Stanford University, Winter 2009 Metric discretization 2 Approach I:
Estimating normal vectors and curvatures by centroid weights
 Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Computer Aided Geometric Design 21 (2004) 447 458 www.elsevier.com/locate/cagd Estimating normal vectors and curvatures by centroid weights Sheng-Gwo Chen, Jyh-Yang Wu Department of Mathematics, National
Digital Geometry Processing
 Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
Digital Geometry Processing Spring 2011 physical model acquired point cloud reconstructed model 2 Digital Michelangelo Project Range Scanning Systems Passive: Stereo Matching Find and match features in
CSCE 5160 Parallel Processing. CSCE 5160 Parallel Processing
 HW #9 10., 10.3, 10.7 Due April 17 { } Review Completing Graph Algorithms Maximal Independent Set Johnson s shortest path algorithm using adjacency lists Q= V; for all v in Q l[v] = infinity; l[s] = 0;
HW #9 10., 10.3, 10.7 Due April 17 { } Review Completing Graph Algorithms Maximal Independent Set Johnson s shortest path algorithm using adjacency lists Q= V; for all v in Q l[v] = infinity; l[s] = 0;
UNIVERSITY OF CALGARY. Subdivision Surfaces. Advanced Geometric Modeling Faramarz Samavati
 Subdivision Surfaces Surfaces Having arbitrary Topologies Tensor Product Surfaces Non Tensor Surfaces We can t find u-curves and v-curves in general surfaces General Subdivision Coarse mesh Subdivision
Subdivision Surfaces Surfaces Having arbitrary Topologies Tensor Product Surfaces Non Tensor Surfaces We can t find u-curves and v-curves in general surfaces General Subdivision Coarse mesh Subdivision
Advanced Computer Graphics
 G22.2274 001, Fall 2010 Advanced Computer Graphics Project details and tools 1 Projects Details of each project are on the website under Projects Please review all the projects and come see me if you would
G22.2274 001, Fall 2010 Advanced Computer Graphics Project details and tools 1 Projects Details of each project are on the website under Projects Please review all the projects and come see me if you would
Research Proposal: Computational Geometry with Applications on Medical Images
 Research Proposal: Computational Geometry with Applications on Medical Images MEI-HENG YUEH yueh@nctu.edu.tw National Chiao Tung University 1 Introduction My research mainly focuses on the issues of computational
Research Proposal: Computational Geometry with Applications on Medical Images MEI-HENG YUEH yueh@nctu.edu.tw National Chiao Tung University 1 Introduction My research mainly focuses on the issues of computational
Sung-Eui Yoon ( 윤성의 )
") CS480: Computer Graphics Curves and Surfaces Sung-Eui Yoon ( 윤성의 ) Course URL: http://jupiter.kaist.ac.kr/~sungeui/cg Today s Topics Surface representations Smooth curves Subdivision 2 Smooth Curves and
CS480: Computer Graphics Curves and Surfaces Sung-Eui Yoon ( 윤성의 ) Course URL: http://jupiter.kaist.ac.kr/~sungeui/cg Today s Topics Surface representations Smooth curves Subdivision 2 Smooth Curves and
THE GEOMETRIC HEAT EQUATION AND SURFACE FAIRING
 THE GEOMETRIC HEAT EQUATION AN SURFACE FAIRING ANREW WILLIS BROWN UNIVERSITY, IVISION OF ENGINEERING, PROVIENCE, RI 02912, USA 1. INTROUCTION This paper concentrates on analysis and discussion of the heat
THE GEOMETRIC HEAT EQUATION AN SURFACE FAIRING ANREW WILLIS BROWN UNIVERSITY, IVISION OF ENGINEERING, PROVIENCE, RI 02912, USA 1. INTROUCTION This paper concentrates on analysis and discussion of the heat
Parameterization of triangular meshes
 Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
Parameterization of triangular meshes Michael S. Floater November 10, 2009 Triangular meshes are often used to represent surfaces, at least initially, one reason being that meshes are relatively easy to
CS205b/CME306. Lecture 9
 CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
CS205b/CME306 Lecture 9 1 Convection Supplementary Reading: Osher and Fedkiw, Sections 3.3 and 3.5; Leveque, Sections 6.7, 8.3, 10.2, 10.4. For a reference on Newton polynomial interpolation via divided
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment