Learning to Sample. Shai Avidan Tel-Aviv University. Oren Dovrat Tel-Aviv University. Itai Lang Tel-Aviv University. Abstract. 1.
|
|
|
- Magnus Preston
- 5 years ago
- Views:
Transcription
1 Learning to Sample Oren Dovrat Tel-Aviv University Itai Lang Tel-Aviv University Shai Avidan Tel-Aviv University We propose a simplification network, termed S-NET, that is based on the architecture of PointNet [1]. S-NET learns to generate a smaller point cloud (also referred to as the simplified point cloud) that is optimized for a downarxiv: v1 [cs.cv] 4 Dec 2018 Abstract Processing large point clouds is a challenging task. Therefore, the data is often sampled to a size that can be processed more easily. The question is how to sample the data? A popular sampling technique is Farthest Point Sampling (FPS). However, FPS is agnostic to a downstream application (classification, retrieval, etc.). The underlying assumption seems to be that minimizing the farthest point distance, as done by FPS, is a good proxy to other objective functions. We show that it is better to learn how to sample. To do that, we propose a deep network to simplify 3D point clouds. The network, termed S-NET, takes a point cloud and produces a smaller point cloud that is optimized for a particular task. The simplified point cloud is not guaranteed to be a subset of the original point cloud. Therefore, we match it to a subset of the original points in a post-processing step. We contrast our approach with FPS by experimenting on two standard data sets and show significantly better results for a variety of applications. Our code is publicly available Introduction Capturing 3D data is getting easier in recent years and there is a growing number of 3D shape repositories available online. This data can be represented in a variety of ways, including point clouds, multi-view images and voxel grids. A point cloud contains information only about the surface of a 3D object, while a grid based representation also holds data about free space, making the former much more efficient. However, processing a point cloud can be challenging, since it may contain a lot of data points. Reducing the number of points can be beneficial in many aspects, such as reduction of power consumption, computational cost and communication load, to name a few. One naive approach to reduce the data load is to randomly sample a subset of points. Another approach, which is commonly used in the literature, is Farthest Point Sam- 1 Equal contribution Corresponding author: Oren.Dovrat@gmail.com Training Inference Input points S-NET S-NET Matching Proposed sampling Generated points Sampled vpoints v v network network Fixed network Fixed Sampling loss loss Joint objective Evaluation metric Figure 1. An illustration of the proposed learned sampling approach. In the training phase, S-NET generates points that are passed to a task network, which was pre-trained and is held fixed. The minimization objective contains the task s loss and a sampling loss. The latter serves as a regularizer and encourages proximity between the input and generated points. At inference time, we match the points generated by S-NET with the input point cloud and get a subset of it. Only these points are then fed to the task network for performance evaluation. pling (FPS) [1, 2, 3]. This sampling method takes into account the structure of the point cloud and selects a group of points that are farthest apart from each other [4, 5]. These sampling methods, as well as other approaches in the literature [6, 7], operate according to a non-learned predetermined rule. In the last few years, deep learning techniques have been applied with great success to point cloud data. Among various applications one can find point cloud classification [1, 2, 3, 8, 9, 10], part segmentation [1, 2, 3, 9, 10, 11], semantic segmentation [1, 3, 10, 12, 13, 14] and retrieval [15, 16]. Other techniques perform point cloud autoencoding [17, 18, 19], generation [17, 20, 21], completion [17, 22, 23] and up-sampling [24, 25, 26]. Yet a learned point clouds sampling approach, subject to a subsequent task objective, has not been proposed before.
2 stream task, such as classification, retrieval or reconstruction. The simplified point cloud must balance two conflicting constraints. On the one hand, we would like it to preserve similarity to the original shape. On the other hand, we wish to optimize it to a subsequent task. We solve this by training the network to generate a set of points that satisfy two objectives: a sampling loss and the task s loss. The sampling loss drives the generated points close to the input point cloud. The task loss ensures that the points are optimal for the task. An advantages of FPS is that it samples a subset of the original points. In contrast, the simplified point cloud produced by S-NET is not guaranteed to be a subset of the input point cloud. To address this issue, we perform a postprocessing step at inference time, where we match the generated points with the input point cloud and obtain a subset of it, i.e., a set of sampled points (see Figure 1). Experiments show that better results for several tasks are achieved using our sampled points in comparison to FPS. Our approach can be thought of as a feature selection mechanism [27, 28]. Each point is a feature of the underlying shape and we seek to select the ones that contribute the most to the task. It can also be interpreted as a form of visual attention [29, 30], focusing the subsequent task network on the significant points. S-NET is trained to output a fixed sample size, which means that we need to train a different S-NET for every target size. To overcome this limitation, we introduce an extension of S-NET termed ProgressiveNet. ProgressiveNet orders points by importance to the task. This lets the sample size to be chosen at inference time, allowing for a dynamic level-of-detail management, according to the requirements and available resources. The proposed sampling approach is applied to three different tasks: point cloud classification, retrieval and reconstruction. We compare our approach with common non-data driven methods: random sampling and FPS. For the first task we show better classification accuracy; in the second we show improved retrieval results; and in the last we get a lower reconstruction error. To summarize, our key contributions are: A task-specific data-driven sampling approach for point clouds; A Progressive sampling method that orders points according to their relevance for the task; Improved performance for point cloud classification, retrieval and reconstruction with sampled point clouds. 2. Related work Point cloud simplification and sampling Several techniques for either point cloud simplification [31, 32] or sampling [33, 34] have been proposed in the literature. Pauly et al. [31] presented and analyzed several simplification methods for point-sampled surfaces, including: clustering methods, iterative simplification and particle simulation. The simplified point set, resulting from these algorithms, was not restricted to be a subset of the original one. Farthest point sampling was adopted in the work of Moenning and Dodgson [32] as a means to simplify point clouds of geometric shapes, in a uniform as well as feature-sensitive manner. Katz and Tal [33] suggested a view dependent algorithm to reduce the number of points. They used hidden-point removal and target-point occlusion operators in order to improve a human comprehension of the sampled point set. Recently, Chen et al. [34] employed graph-based filters to extract per point features. Points that preserve specific information are likely to be selected by a their sampling strategy. The desired information is assumed to be beneficial to a subsequent application. The above sampling approaches aim to optimize a variety of sampling objectives. However, they do not consider directly the objective of the task to be followed. Progressive simplification In a seminal paper, Hoppe [35] proposed a technique for progressive mesh simplification. In each step of his method, one edge is collapsed such that minimal geometric distortion is introduced. A recent work by Hanocka et al. [36] suggested a neural network that performs task-driven mesh simplification. Their network relies on the edges between the mesh vertices. This information is not available for point clouds. Several researchers studied the topic of point set compression [37, 38, 39]. An octree data structure was used for progressive encoding of the point cloud. The objective of the compression process was low distortion error. Deep learning on point sets The pioneering work of Qi et al. [1] presented PointNet, the first neural network that operates directly on unordered point cloud data. They constructed their network from per-point multi-layer perceptrons, a symmetric pooling operation and several fully connected layers. PointNet was employed for classification and segmentation tasks and showed impressive results. For assessing the applicability of PointNet for reduced number of input points, they used random sampling and FPS. In our work, we suggest a data-driven sampling approach, that improves the classification performance with sampled sets in comparison to these sampling methods. Later on, Qi et al. extended their network architecture for hierarchical feature learning [2]. In the training phase, centroid points for local feature aggregation were selected by FPS. Similar to their previous work [1], FPS was used for evaluating the ability of their network to operate on fewer input points. Li et al. [11] suggested to learn the centroid points for
3 feature aggregation by a self-organizing map (SOM). They used feature propagation between points and SOM nodes and showed improved results for point cloud classification and part segmentation. The SOM was optimized separately, as a pre-processing step. Building on the work of Qi et al. [1], Achlioptas et al. [17] developed auto-encoders and generative adversarial networks for point clouds. Instead of shape class or perpoint label, the output of their network was a set of 3D points. In this work we apply our sampling approach for the task of point cloud reconstruction with the auto-encoder proposed by Achlioptas et al. Several researchers tackled the problem of point cloud consolidation. Yu et al. [24] extracted point clouds from geodesic patches of mesh models. They randomly sampled the point sets and trained a network to reconstruct the original patch points. Their follow-up work [25] incorporated edge information to improve the reconstruction accuracy. Zhang et al. [26] studied the influence of sampling strategy on point cloud up-sampling. They used Monte-Carlo random sampling and curvature based sampling. Their network was trained to produce a fixed size point cloud from its sample. In contrast to these works, our study focuses on the down-sampling strategy. 3. Method Problem statement Given a point set P = {p i R 3, i = 1,..., n}, a sample size k n and a task network T, find a subset S of k points that minimizes the task network s objective function f: S = argmin S f(t (S)), S P, S = k n. (1) This problem poses a challenge, as sampling might seems akin to pooling, yet in pooling the pooled value is propagated forward, so the gradient with respect to it can be calculated. Discrete sampling, however, is like argpooling, where the propagated value cannot be updated incrementally. As a result, a sampling operation cannot be trained directly. Therefore, we propose a two-step process: first, we employ a neural network, i.e., S-NET, to generate a set of points. Second, we match the generated points with the input point cloud to obtain a subset of its points, i.e., the sampled points. Figure 1 illustrate the process. The input to S-NET is a set of n 3D coordinates, namely points, representing a 3D shape. The output of S-NET is k generated points. S-NET is followed by a task network. The task network is pre-trained on an input of n points, to perform a given task on the point cloud (i.e., classification, retrieval or reconstruction). It is kept fixed during training and testing of S-NET. This ensures that sampling is being optimized to the task, rather than the task being optimized to an arbitrary sampling. At the training phase, the generated points are fed to the task network. The points are optimized to the task at hand by minimizing the task loss. We use an additional sampling regularization loss term, that encourages each of the generated points to be close to one of the input points and forces the generated points to spread over the input cloud. At inference, the generated points are matched with the input point cloud in order to obtain a subset of it. These are the sampled points, the final output of our process. These points are passed through the task network and its performance is evaluated. We present two sampling versions: S-NET and ProgressiveNet. In the first version (Figure 1), we train a different sampling network per sample size. In the second one (Figure 19), we train one network that can be used to produce any sample size smaller than the input size S-NET The architecture of S-NET follows that of Qi et al. [1]. The input points undergo a set of 1 1 convolution layers, resulting in a per point feature vector. Then, a symmetric feature-wise max pooling operation is used to obtain a global feature vector. Finally, we use several fullyconnected layers. The output of the last layer is the set of generated points. Let us denote the generated point set as G and the input point set as P. We construct a sampling regularization loss, composed out of three terms: L f (G, P ) = 1 G x G min x y P y 2 2 (2) L m (G, P ) = max x G min y P x y 2 2 (3) L b (G, P ) = 1 P y P min y x G x 2 2. (4) L f and L m keeps the points in G close to those in P, in the average and worst case, respectively. This is designed to encourage tight matches in the following matching process. We found that mixing average and maximum operations speeds up convergence. L b ensures that the generated points are well spread over the input points, decreasing the number of collisions in the matching process. The sampling regularization loss is a weighted sum of these three terms: L s (G, P ) = L f (G, P ) + βl m (G, P ) +(γ + δ G )L b (G, P ). Note that this is a generalization of the Chamfer distance [40], achieved when β = 0, γ = 1 and δ = 0. In addition, we denote L task as the task network loss. The total S-NET loss is: (5) L S NET (G, P ) = L task (G) + αl s (G, P ) (6)
4 where α controls the regularization trade-off. The output of S-NET is a k 3 matrix, where k is the sample size, and we train separately for each k Matching The generated points G are not guaranteed to be a subset of the input points P. In order to get a subset of the input points, we match the generated points to the input point cloud. A widely used approach for matching two point sets is the Earth Mover s Distance (EMD) [17, 23, 26, 40]. EMD finds a bijection between the sets that minimizes the average distance of corresponding points, while the point sets are required to have the same size. In our case, however, G and P are of different size. We examine two matching methods. The first adapts EMD to uneven point sets. The second is based on nearest neighbour (NN) matching. Here we describe the latter, which yielded better results. The reader is referred to the supplementary for details about the other matching method. In NN-based matching, each point x G is replaced with its closest euclidean corresponding point y P : y = argmin y P x y 2. (7) Since several points in G might be closest to the same point in P, the number of unique sampled points might be smaller than the requested sample size. Therefore, we remove duplicate points and get an initial sampled set. Then, we complete this set, up to the size of G, by running farthest point sampling (FPS) [2], where in each step we add a point from P that is farthest from the current sampled set. The matching process is only applied at inference time, as the final step of inference. During training, the generated points are processed by the task network as-is, since the matching is not differentiable and cannot propagate the task loss back to S-NET ProgressiveNet: sampling as ordering S-NET is trained to sample the points to a single, predefined, sample size. If more than one sample size is required, more than one S-NET needs to be trained. But what if we want to train one network that can produce any sample size, i.e., sample the input at any sampling ratio? To this end we present ProgressiveNet. ProgressiveNet is trained to take a point cloud of a given size and return a point cloud of the same size, consisting of the same points. But, while the points of the input are arbitrarily ordered, the points of the output are ordered by their relevance to the task. This allows sampling to any sample size: to get a sample of size k, we simply take the first k points of the output point cloud of ProgressiveNet and discard the rest. The architecture of ProgressiveNet is the same as S-NET, with the last fully connected layer size equal to the input point cloud size (has 3n elements). Training ProgressiveNet S-NET v network loss Sampling loss network loss 4 Sampling loss Overall objective network loss 4 Sampling loss Figure 2. ProgressiveNet training. The generated points are divided into groups of increasing size, such that each group is a subset of the following larger group. Each group has corresponding task and sampling losses. The overall objective is the sum of the per-group losses. The task network was pre-trained and is kept fixed. To train ProgressiveNet (Figure 2) we define a set of sizes C s = {2 1, 2 2,..., 2 log2(n) }. For each size c C s we compute a task loss term and a sampling regularization loss term, such that the total ProgressiveNet s loss becomes: L P rogressivenet (G, P ) = c C s L S NET (G c, P )) (8) where L S NET is the loss term as defined in equation 6 and G c are the first c points from the points generated by ProgressiveNet (the first 3c elements of the output layer). This loss function defines a nested structure of point subsets. For example, the first subset, consisting of two points, is used in all terms L S NET (G c, P ), for c 2. Because this subset is used in all terms, it is contained in all larger subsets. Similarly, the first 4 points define the second subset, that includes the first subset and is part of all larger subsets. Under this training process, the first k generated points (for any k) are optimized to be suitable both for the task at hand as a stand-alone set and for integration with their preceding points to create a larger set that will improve results on the given task. This makes sure that a point that is more important for the task will appear earlier in the generated point set, while extra points will give diminishing marginal utility, resulting in a a task-oriented progressive decomposition of the point cloud [41]. At inference, the generated points (ProgressiveNet s output layer) are matched with the input point cloud using the same matching process we used in section 3.2 for S- NET. We transfer the order of the generated points to their matched points. To obtain a specific sample size k, we take the first k sampled points.
5 4. Results We applied S-NET to three tasks: point set classification [1], retrieval and reconstruction [17]. For classification and retrieval we adopt the ModelNet40 [42] point cloud data provided by Qi et al. [1] and PointNet [1] as the task network. For reconstruction we employ ShapeNet Core55 repository [43] and the point set autoencoder of Achlioptas et al. [17]. Random sampling and FPS are employed as alternative non-data driven sampling approaches for comparison with our suggested approach. In order to make a fair comparison, we only use S-NET points after the matching process, so both our sampled points and the alternative approaches points are subsets of the input point cloud. Further experimental details can be found in the supplementary material Classification We report instance classification results on the Model- Net40 data set, adopting the official train-test split. We employed the full version of PointNet as the task network for S-NET and the vanilla version of PointNet for ProgressiveNet (to save training time), except where otherwise noted. S-NET Figure 3 shows the classification accuracy of PointNet, when trained on the complete data (1024 points per point cloud) and tested on samples of different size. We compare several different sampling methods: random sampling with uniform distribution over the input points, FPS and S-NET. We trained 10 different S-NETs, for sample sizes of k {2, 4, 8,..., 1024} points. The sampling ratio is defined as n/k = 1024/k. We observe that the classification accuracy using S-NET s sampled points is equal or better than that of using FPS s points for any sampling ratio, with a margin of up to 34.2% (for sampling ratio 32). Table 1 shows that the accuracy of PointNet is also higher when training it on the points sampled by S-NET. Each of the numbers in this table represents a different PointNet, each trained and tested on point clouds of a specific size that was sampled with a different sampling method. We see, for example, that PointNet that was both trained and tested on point clouds of just 16 points, achieved 85.6% accuracy, when using S-NET, compared to only 76.7% with FPS. This shows that S-NET is not overfitted to the specific instance of the classifier it was trained with. Instead, it samples the points in a way that makes the sampled set easy to classify, creating a strong distinction between different classes in the data. ProgressiveNet In Figure 4 we compare the accuracy of PointNet vanilla on points sampled by S-NET (trained with PointNet vanilla, in this case) to those sampled by ProgressiveNet. The evaluation was done for all sample sizes in Classification Accuracy Random FPS S-NET Sampling ratio (log 2 scale) Figure 3. S-NET for classification. PointNet was trained on complete point clouds (1024 points) and evaluated on sampled point clouds of the test set using different sampling methods: random, FPS, and S-NET. The accuracy using S-NET is evidently higher. #Sampled points Random FPS S-NET Table 1. Training PointNet classifier on sampled point clouds. We sample the train and test data with different sampling methods: random sampling, FPS, and S-NET. Afterwards, PointNet is trained and evaluated on the sampled data. Applying S-NET allows good classification even with minimal data to train on. We conclude that S-NET transforms the data into a more separable representation. the range [2, 1024]. S-NET results are from 10 different S- NETs, each trained for a specific sample size, for sizes of k {2, 4, 8,..., 1024} points. For the sample sizes in between those values, we took the S-NET that was trained for a lower sample size and then completed with FPS to the required size. For example, to get a sample of size 48, we took the points sampled by S-NET that was trained to sample 32 points, and then made 16 steps of FPS. The Progressive results are from one ProgressiveNet with output size 1024, that was trained with classification and sampling loss terms for sizes C s = {2, 4, 8,..., 1024}. We observe that S-NET has better performance for the sample sizes it was trained for, while ProgressiveNet performs better for any sample size in between. This shows the advantage of ProgressiveNet, which orders the points by priority, so that the accuracy is approximately monotonically increasing in the sample size.
![Classification Accuracy 10 9 8 7 6 5 4 3 2 1 FPS S-NET ProgressiveNet 1 2 4 8 16 32 64 128 256 512 Sampling ratio (log 2 scale) Figure 4. ProgressiveNet vs. S-NET. PointNet vanilla was trained on complete point clouds (1024 points) and evaluated on every sample size k in the range [2, 1024].](/docs-images/91/107174690/images/6-0.jpg "The sampling ratio is defined as 1024/k. We compared three different sampling methods: FPS, S-NET and ProgressiveNet.")
6 Classification Accuracy FPS S-NET ProgressiveNet Sampling ratio (log 2 scale) Figure 4. ProgressiveNet vs. S-NET. PointNet vanilla was trained on complete point clouds (1024 points) and evaluated on every sample size k in the range [2, 1024]. The sampling ratio is defined as 1024/k. We compared three different sampling methods: FPS, S-NET and ProgressiveNet. S-NET is better for the sample sizes it was trained for, while ProgressiveNet performs better for sample sizes in between. Scalability by S-NET S-NET assumes that the task network is already trained. This will cause a problem in case of very large point clouds. We show that it is possible to train the task network on FPS-sampled point clouds and use that to train S-NET. The resulting S-NET can then be used to re-train the task network to a higher accuracy. Please see Figure 5 for an illustration of the proposed training and testing procedure. The following small scale simulation demonstrate this: We used FPS to sample ModelNet40 to k = 32 points per point cloud, and trained PointNet on those sampled points. This is our baseline. The accuracy of the baseline on the test set is 82.2%. When we fed this trained PointNet with point clouds of size 1024, the accuracy was just 46.6%. We then trained S-NET, using the 32-sized point clouds training set, and the baseline PointNet as the task network. Then we sampled ModleNet40 again to size k = 32, this time using S-NET. Finally, we trained PointNet on the points sampled by S-NET. The accuracy of the re-trained PointNet on the test set improved to 86.0%. Employing S-NET allows us to improve PointNet s accuracy without training on larger point clouds. Time and space considerations The time complexity of PointNet-like networks is dominated by their per-point convolution layers, and thus is strongly dependent on the size of the input point cloud. The space complexity of S-NET is a linear function of its output size k. S-NET offers a trade-off between space (number of parameters) and inference time (number of floating point operations). For example, cascading S-NET that samples a point cloud of 1024 to 16 points with a following PointNet reduces inference time by over 90% compared to running PointNet on the complete point cloud, with only 5% increase in space. Figure 5. Scalability by S-NET. Illustration of the proposed training and inference procedure on large point clouds. In stage 1 we use FPS to sample the point clouds to a trainable size and use the sampled point clouds to train the task network. In stage 2 we train S-NET on the sampled point clouds, employing the fixed task network. In stage 3 we apply S-NET to re-sample the large point clouds and in stage 4 we train the task network again, this time on S-NET s points. At inference time, we use S-NET to sample a large point cloud to the size the task network was trained for. Approximate sampling Up to this point we applied the matching post-processing step to compare ourselves directly with FPS. However, there might be settings where the k output points do not have to be a subset of the original point cloud. In such cases, we can use S-NET s generated points directly, forgoing the matching step. One can use either the generated or the sampled points. A third alternative is to interpolate between the two, i.e., using points that are up to ɛ away from the original input points. This is done by interpolating each generated point with its matched sampled point, to get a third point on the line between them, no more than ɛ away from the sampled point. Figure 6 shows that PointNet s accuracy is higher when feeding it the generated points. For point clouds normalized to the unit sphere, we find that choosing ɛ = 5 results in classification accuracy that is about mid-way between the accuracy on the sampled and generated points. Note that ɛ is set at inference time. Critical set sampling The critical set, as defined by Qi et al. [1], is the set of points that contributed to the max pooled features. A plausible alternative to our method might be to sample the critical points that contribute the most features. We tried this approach and found it viable only at small sampling ratios. See full details in the supplementary material Retrieval We now show that employing S-NET instead of FPS leads to better retrieval results. Specifically, we took the S- NET that was trained with PointNet for classification as the task network, without re-training it. We sampled the points
7 Classification Accuracy Sampled Generated Approximate ( = 5) Sampling ratio (log 2 scale) Precision Complete input points FPS - 32 points S-NET - 32 points Recall Figure 6. Approximate sampling. PointNet was trained on complete point clouds (1024 points) and evaluated on point clouds of different sizes. We use S-NET s generated and sampled points, as well as a third set of points, where each point is an interpolation between the generated and sampled point, bounded to be no more than ɛ = 5 away from an original input point. Approximate sampling enables higher accuracy, when deviating from original points is not a concern. Sampling ratio FPS map S-NET map Table 2. Point cloud retrieval. We took the same S-NET that was trained with PointNet classifier as the task network and applied it as the sampling method for retrieval. The shape descriptor was PointNet s activations of the layer before the last, with L 2 as the distance metric. We measured the macro mean Average Precision (map) for different sampling ratios and methods. S-NET performs better than FPS for large sampling ratios and is almost insensitive to the sampling ratio. that are fed to PointNet and used its penultimate layer as a shape descriptor. Retrieval was done based on L 2 distance on this shape descriptor. We repeated the experiment with every shape in the ModelNet40 test set serving as a query shape. The experiment was repeated with different sample sizes for both S-NET and FPS. Table 2 summarizes the mean Average Precision (map) for different sampling ratios and sampling methods. We see that S-NET performs much better for sampling ratios larger than 4 and is not very sensitive to the sampling ratio. Figure 7 presents the precision-recall curve for the original data and for the sampled data using FPS and S-NET, sampling to k=32 points per shape. We observe significantly better precision when applying S-NET across all recall values. Figure 7. Precision-Recall curve for point cloud retrieval. We compare FPS and S-NET when sampling 32 points, as well as using the complete 1024 points data. Significantly better precision is achieved when using S-NET compared to FPS, across all recall values Reconstruction We next learn to sample with an autoencoder as the task network. We used the ShapeNet Core55 point cloud data provided by Achlioptas et al. [17], as well as their autoencoder and trained it on four shape classes: table, car, chair and airplane. These classes have the most available models. Each shape class is split into 85%-5%-10% for trainvalidation-test sets. The autoencoder was trained to receive and reconstruct point clouds of 2048 points. The reconstruction error of the autoencoder is measured by the Chamfer distance [17]. In order to compare different sampling methods, we use Normalized Reconstruction Error (NRE). That is, we reconstruct the complete point set from a subset of points and from the complete point set and take the reconstruction error ratio between the two. We trained several S-NETs with the following sample sizes: k {32, 64,..., 2048}, and a single ProgressiveNet with loss terms for the same sizes. As an alternative sampling approach we used FPS. Normalized reconstruction error Figure 8 presents the NRE as a function of the sampling ratio, where the sampling ratio is defined as n/k = 2048/k. We compare FPS with S-NET and ProgressiveNet. For small sampling ratios, the NRE for our sampled points is similar to that of FPS. However, as the sampling ratio increases, our sampling methods outperform FPS. For example, at sampling ratio of 32, the NRE of FPS is a little over 2, while the NRE of S-NET and ProgressiveNet is about 1.5 and 1.75, respecitvely. S-NET achieves lower NRE than ProgressiveNet, since the former was optimized separately per sampling ratio, resulting in improved reconstruction performance. We learn to sample points from unseen shapes that enable lower reconstruction error. Sample and reconstruction visualization Figure 9 compares the reconstruction result from the entire point cloud,



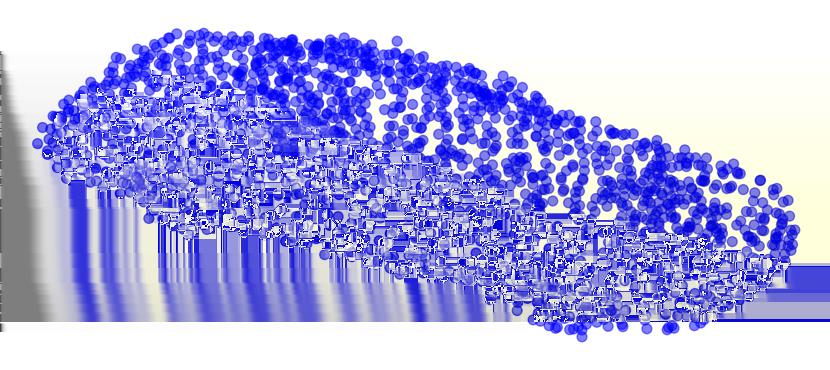
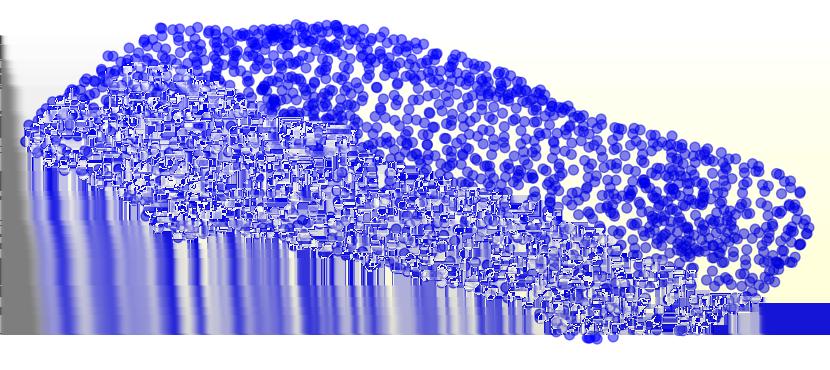
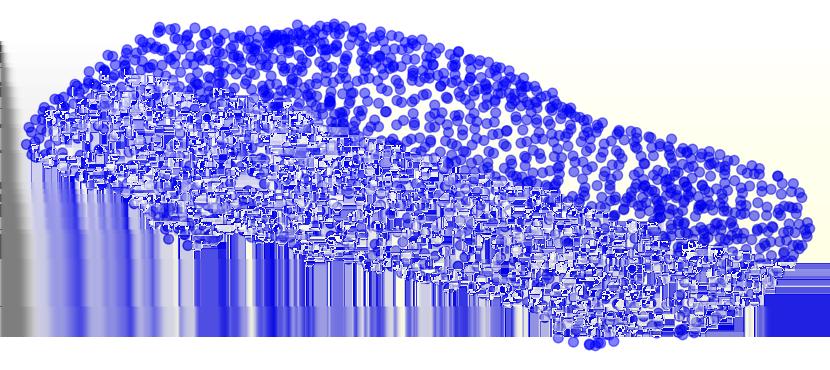
, input with 64 FPS points (in Magenta).")




8 Normalized Reconstruction Error FPS ProgressiveNet S-NET Sampling ratio (log2 scale) Figure 8. Normalized Reconstruction Error (NRE). We trained an autoencoder on complete point clouds of 2048 points, and evaluated the reconstruction error from sampled point clouds with FPS, S-NET and ProgressiveNet on the test split. Up to a sampling ratio of 8, the error for S-NET and ProgressiveNet is on par with FPS. However, at higher sampling ratios S-NET and ProgressiveNet achieves lower error. to that from a sample size of 64 points, where the samples are produced by either S-NET or FPS. The reconstruction quality when employing S-NET is higher than that of using FPS and approaches that of using the entire point cloud. Interestingly, the points sampled by S-NET are non-uniformly distributed, as opposed to the more uniform distribution of the points sampled by FPS. Complete Input NRE = 1.00 S-NET NRE = 1.11 FPS NRE = 2.38 Figure 9. Point cloud reconstruction. NRE stands for Normalized Reconstruction Error. Top row: complete input point cloud of 2048 points, input with 64 S-NET sampled points (in Green), input with 64 FPS points (in Magenta). The sampled and FPS points are enlarged for visualization purpose. Bottom row: reconstructed point cloud from the input and from the corresponding sample. The reconstructed point cloud from S-NET s sampled points is visually more similar to the input and has lower reconstruction error. Adversarial simplification In this proof of concept we show how to trick the autoencoder. We simplify a point cloud to be visually similar to one class but reconstructed by the autoencoder to a shape from a different class. We train S-NET with a single pair of input and target shapes, where the input is a shape from one class and the target is a shape from another class. The sampling loss was between the input and the points generated by S-NET. The reconstruction loss was between the target shape and the reconstructed one. Figure 10 shows the result of turning an airplane into a car. 5. Conclusions We presented a method that learns how to sample a point cloud that is optimized for a downstream task. The method consists of a simplifying network, S-NET, followed by a post-processing matching step. We also suggested a network, termed ProgressiveNet, for ordering a point cloud according to the contribution of each point to the task. The resulting methods outperform FPS in sampling points for several tasks: classification, retrieval and reconstruction of point clouds. The proposed method is general and can produce a small point cloud that consists of points that are not necessarily part of the original input shape. The output point cloud minimizes a geometric error with respect to the input point Figure 10. Adversarial simplification. Top row: input shape (in Blue) and 256 generated points (in Red). Bottom row: target shape and reconstruction from the generated points. While the simplified point cloud resembles the input airplane shape, it is reconstructed to a completely different shape - a car! cloud while optimizing the objective function of a downstream task. We have shown that learning to sample can improve results and be used in conjunction with various applications.
9 References [1] C. R. Qi, H. Su, K. Mo, and L. J. Guibas, PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp , , 2, 3, 5, 6, 11, 13 [2] C. R. Qi, L. Yi, H. Su, and L. J. Guibas, PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space, Proceedings of Advances in Neural Information Processing Systems (NIPS), , 2, 4 [3] Y. Li, R. Bu, M. Sun, W. Wu, X. Di, and B. Chen, PointCNN: Convolution On X-Transformed Points, Proceedings of Advances in Neural Information Processing Systems (NIPS), [4] T. F. Gonzalez, Clustering to minimize the maximum intercluster distance, Theoretical Computer Science, vol. 38, pp , [5] C. Moenning and N. A. Dodgson, Fast Marching farthest point sampling, Eurographics Poster Presentation, [6] M. Alexa, J. Behr, D. Cohen-Or, S. Fleishman, D. Levin, and C. T. Silva, Point Set Surfaces, Proceedings of IEEE Visualization Conference, pp , [7] L. Lars, Point Cloud Representation, Technical Report, Faculty of Computer Science, University of Karlsruhe, [8] M. Zaheer, S. Kottur, S. Ravanbhakhsh, B. Pczos, R. Salakhutdinov, and A. J. Smola, Deep Sets, Proceedings of Advances in Neural Information Processing Systems (NIPS), [9] Y. Shen, C. Feng, Y. Yang, and D. Tian, Mining Point Cloud Local Structures by Kernel Correlation and Graph Pooling, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [10] Y. Wang, Y. Sun, Z. Liu, S. E. Sarma, M. M. Bronstein, and J. M. Solomon, Dynamic Graph CNN for Learning on Point Clouds, arxiv preprint arxiv: , [11] J. Li, B. M. Chen, and G. H. Lee, SO-Net: Self-Organizing Network for Point Cloud Analysis, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), , 2 [12] L. Tchapmi, C. Choy, I. Armeni, J. Gwak, and S. Savarese, SEGCloud: Semantic Segmentation of 3D Point Clouds, Proceedings of the International Conference on 3D Vision (3DV), [13] H. Su, V. Jampani, D. Sun, S. Maji, E. Kalogerakis, M.-H. Yang, and J. Kautz, SPLATNet: Sparse Lattice Networks for Point Cloud Processing, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, pp , [14] B.-S. Hua, M.-K. Tran, and S.-K. Yeung, Pointwise Convolutional Neural Networks, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [15] M. A. Uy and G. H. Lee, PointNetVLAD: Deep Point Cloud Based Retrieval for Large-Scale Place Recognition, Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [16] Z. Kuang, J. Yu, J. Fan, and M. Tan, Deep Point Convolutional Approach for 3D Model Retrieval, Proceedings of the IEEE International Conference on Multimedia and Expo (ICME), [17] P. Achlioptas, O. Diamanti, I. Mitliagkas, and L. J. Guibas, Learning Representations and Generative Models For 3D Point Clouds, Proceedings of the International Conference on Learning Representations (ICLR), , 3, 4, 5, 7, 16 [18] Y. Yang, C. Feng, Y. Shen, and D. Tian, FoldingNet: Point Cloud Auto-encoder via Deep Grid Deformation, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [19] T. Groueix, M. Fisher, V. G. Kim, B. Russell, and M. Aubry, AtlasNet: A Papier-Mâché Approach to Learning 3D Surface Generation, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), [20] Y. Sun, Y. Wang, Z. Liu, J. E. Siegel, and S. E. Sarma, PointGrow: Autoregressively Learned Point Cloud Generation with Self-Attention, arxiv preprint arxiv: , [21] C.-L. Li, M. Zaheer, Y. Zhang, B. Poczos, and R. Salakhutdinov, Point Cloud GAN, arxiv preprint arxiv: , [22] S. Agrawal and S. Gurumurthy, High Fidelity Semantic Shape Completion for Point Clouds using Latent Optimization, Proceedings of the IEEE Winter Conference on Applications of Computer Vision (WACV), [23] W. Yuan, T. Khot, D. Held, C. Mertz, and M. Hebert, PCN: Point Completion Network, Proceedings of the International Conference on 3D Vision (3DV), , 4 [24] L. Yu, X. Li, C.-W. Fu, D. Cohen-Or, and P. A. Heng, PU- Net: Point Cloud Upsampling Network, Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR), , 3 [25] L. Yu, X. Li, C.-W. Fu, D. Cohen Or, and P. A. Heng, EC- Net: an Edge-aware Point set Consolidation Network, Proceedings of the European Conference on Computer Vision (ECCV), , 3 [26] W. Zhang, H. Jiang, Z. Yang, S. Yamakawa, K. Shimada, and L. B. Kara, Data-driven Upsampling of Point Clouds, arxiv preprint arxiv: , , 3, 4 [27] I. Guyon and A. Elisseeff, An introduction to variable and feature selection, The Journal of Machine Learning Research, pp , [28] R. Kohavi and G. H. John, Wrappers for feature subset selection, Artificial Intelligence, pp , [29] V. Mnih, N. Heess, A. Graves, and K. Kavukcuoglu, Recurrent Models of Visual Attention, Proceedings of Advances in Neural Information Processing Systems (NIPS),
10 [30] B. Jimmy, V. Mnih, and K. Kavukcuoglu, Multiple Object Recognition with Visual Attention, Proceedings of the International Conference on Learning Representations (ICLR), [31] M. Pauly, M. Gross, and L. P. Kobbelt, Efficient Simplification of Point-Sampled Surfaces, Proceedings of IEEE Visualization Conference, [32] C. Moenning and N. A. Dodgson, A new point cloud simplification algorithm, Proceedings of the IASTED International Conference on Visualization, Imaging and Image Processing (VIIP), [33] S. Katz and A. Tal, Improving the Visual Comprehension of Point Sets, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp , [34] S. Chen, D. Tian, C. Feng, A. Vetro, and J. Kovaevi, Fast Resampling of Three-Dimensional Point Clouds via Graphs, IEEE Transactions on Signal Processing, vol. 66, pp , [35] H. Hoppe, Progressive Meshes, Proceedings of the ACM Special Interest Group on Computer Graphics (SIGGRAPH), pp , [36] R. Hanocka, A. Hertz, N. Fish, R. Giryes, S. Fleishman, and D. Cohen-Or, MeshCNN: A Network with an Edge, arxiv preprint arxiv: , [37] J. Peng and C.-C. J. Kuo, Octree-Based Progressive Geometry Encoder, Proceedings of SPIE, pp , [38] Y. Huang, J. Peng, C.-C. J. Kuo, and M. Gopi, Octree-Based Progressive Geometry Coding of Point Clouds, Proceedings of the Eurographics Symposium on Point-Based Graphics, pp , [39] R. Schnabel and R. Klein, Octree-based Point-Cloud Compression, Proceedings of the Eurographics Symposium on Point-Based Graphic, [40] H. Fan, H. Su, and L. J. Guibas, A point set generation network for 3d object reconstruction from a single image, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), , 4, 11 [41] J. M. Singh and P. Narayanan, Progressive Decomposition of Point Clouds Without Local Planes, Computer Vision, Graphics and Image Processing, pp , [42] Z. Wu, S. Song, A. Khosla, F. Yu, L. Zhang, X. Tang, and J. Xiao, 3d shapenets: A deep representation for volumetric shapes, Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), pp , [43] A. X. Chang, T. Funkhouser, L. Guibas, P. Hanrahan, Q. Huang, Z. Li, S. Savarese, M. Savva, S. Song, H. Su, J. Xiao, L. Yi, and F. Yu, ShapeNet: An Information-Rich 3D Model Repository, arxiv preprint arxiv: , [44] V. Nair and G. E. Hinton, Rectified Linear Units Improve Restricted Boltzmann Machines, Proceedings of the International Conference on Machine Learning (ICML), [45] S. Ioffe and C. Szegedy, Batch Normalization: Accelerating Deep Network Training by Reducing Internal Covariate Shift, Proceedings of the International Conference on Machine Learning (ICML), [46] D. P. Kingma and J. L. Ba, Adam: A Method for Stochastic Optimization, Proceedings of the International Conference on Learning Representations (ICLR), [47] D. P. Bertsekas, A distributed asynchronous relaxation algorithm for the assignment problem, Proceedings of the 24th IEEE Conference on Decision and Control, pp ,
11 Supplementary In the following sections we provide additional details and analysis regarding our results. In Section A we provide experimental details and additional results for our method. Section B displays visual examples of retrieved shapes and progressive sampling. Section C offers a new application for the progressive concept: A progressive autoencoder. A. Additional results In this section we extend the results section of the paper to include: details of our experimental parameters, analysis of the different matching methods, evaluation of regularization parameters, elaboration of the space and time considerations, analysis of critical set sampling, and comparison of the class accuracy. A.1. Experimental details Classification Architecture The architecture of S-NET for the classification experiment is inspired by the vanilla version of PointNet by Qi et al. [1]. We use per point 1 1 convolution layers with output sizes of [64, 64, 64, 128, 128]. Then, a feature-wise max-pooling layer is used to obtain a global feature vector. This feature vector is passed through four fully connected layers of size [256, 256, 256, k 3], where k is the sample size.. All convolution and fully connected layers are followed by ReLU non-linearity [44] and batch-normalization layer [45], except for the output layer. ProgressiveNet takes the architecture of S-NET with k = Classification Optimization We used Adam optimizer [46] with a learning rate of 1, decay rate of 0.7 every steps and batch size of 32 point clouds. The regularization weights (for equations 5 and 6) were set to α = 30, β = 1, γ = 1, δ = 0 for S-NET and α = 30, β = 1, γ = 0.5, δ = 1/30 for ProgressiveNet. We trained the networks for 500 epochs with a GTX 1080 Ti GPU. When using PointNet as the task network, S-NET training takes between 2 to 7 hours, depending on the sample size. ProgressiveNet training takes 6 hours, when using PointNet vanilla as the task network. Classification Augmentation We employed the augmentation proposed by Qi et al. [1]: random rotation of the point cloud along the up-axis, and jittering the position of each point by a Gaussian noise with zero mean and 2 standard deviation. Reconstruction Architecture The architecture of S-NET for the reconstruction experiment follows the same basic structure as in the classification case, with 1 1 of sizes [64, 128, 128, 256, 128] and fully connected layers of seizes [256, 256, k 3]. ProgressiveNet takes the architecture of S-NET with k = Sampling FPS ProgressiveNet ProgressiveNet ratio (1 + ɛ) matching NN matching Table 3. Matching methods comparison. We compare the classification accuracy of PointNet vanilla on the sampled points when using different matching methods: (1 + ɛ) and Nearest Neighbour (NN). FPS is shown for reference. NN matching is better for all sampling ratios larger than 4. Reconstruction Optimization To train both S-NET and ProgressiveNet, we used Adam optimizer with a learning rate of 005, momentum 0.9 and mini-batches of 50 shapes. The regularization weights were set to α = 1, β = 1, γ = 0, δ = 1/64. We trained the networks for 500 epochs with a Titan X Pascal GPU. S-NET training takes between 4 to 8 hours, depending on the sample size. ProgressiveNet training time is about 12 hours. No augmentation was used for reconstruction. A.2. Matching methods We examined two matching methods. The first one is based on nearest neighbour (NN) matching, as detailed in Section 3.2. In the second one, we adapted the implementation of the (1 + ɛ) approximation scheme for EMD [47], provided by Fan et al. [40]. This implementation gives a matching score for each point in one point cloud to each point in the other one. We feed the algorithm with G and P and take the points from P corresponding to the highest matching score for each point in G. In Table 3 we compare these matching methods. The accuracy is better with NN matching for large sampling ratios, and is almost the same for small ones. NN matches every point in G with its closest point in P. This ensures that all generated points that S-NET learned are reflected in the matched set. This is not the case when using (1 + ɛ), where a generated point might be matched with a far input point, if it serves the (1 + ɛ) approximation scheme. In addition, NN matching is independent for each point, thus it guarantees to keep the order of the points produced by ProgressiveNet. A.3. Regularization In this section we explore the influence of the sampling regularization loss and it s components. The reader is referred to section 3.1 for the relevant background and equations.
12 Classification Accuracy FPS Sampled Sampled ( = 0) Generated Generated ( = 0) Sampling ratio (log 2 scale) Figure 11. Turning off the sampling regularization loss (α = 0). PointNet vanilla was trained on complete point clouds (1024 points) and evaluated on either S-NET s generated or sampled points, either with or without the sampling regularization loss. Without the regularization, the accuracy using the generated points is slightly increased. However, the accuracy when using the sampled points decreases substantially. Number of matched points Y=X ProgressiveNet ProgressiveNet ( = 0) Number of generated points Figure 12. Turning off the linear factor for L b component (δ = 0). Average number of unique points in the initial sampled set (after NN matching, before FPS completion) is shown as a function of the number of generated points. Ideally, we would like to get the line Y = X, which means that every generated point has a unique matched input point. Setting δ = 0 greatly reduce the number of unique matches. Turning off the regularization (α = 0) Figure 11 shows the accuracy of PointNet vanilla using either S-NET s generated or sampled points, with and without regularization. Without the regularization, the accuracy using the generated points is slightly increased, which is expected, since the regularization sacrifices some of the classification loss to minimize the sampling loss. However, after the matching process the classification accuracy on the unregularized sampled points is much lower than when using the regularization. Without the sampling regularization, the generated points are not close to the original points and are not spread out over the whole shape. As a result, the matching process causes the sampled points to be very different from the generated points. Therefore, the sampled points do not preserve the contribution of the generated points to the task. Turning off the linear factor for L b component (δ = 0) In Figure 12 we see the average number of unique points in the initial sampled set (after NN matching, before FPS completion) as a function of the number of generated points. For low values, the numbers are almost the same, but they diverge for higher values. Ideally, we would like to get the identity line Y = X, meaning that each generated point is uniquely matched with an input point without any collisions. Using a linear factor for the L b regularization term, such that the weight is larger for large sampling sizes, improves the spread of the generated points over the shape and reduces collisions. Turning off the L b component (γ, δ = 0) In Figure 13 we see the accuracy of PointNet vanilla using ProgressiveNet sampled points, either with or without the L b regularization term. Without this term, the generated points tend to concentrate on small portions of the input point cloud, resulting in many collisions in the matching process. This Classification Accuracy FPS ProgressiveNet ProgressiveNet (, = 0) Sampling ratio (log 2 scale) Figure 13. Turning off the L b component (γ, δ = 0). PointNet vanilla was trained on complete point clouds (1024 points) and evaluated on ProgressiveNet s sampled points, either with or without the L b regularization term. The results are evidently better with the L b term. makes the FPS completion more dominant. For low sampling ratios this is not a concern, since FPS gives decent results. For very high sampling ratios this is also not a concern, since the task loss forces the small number of generated points to spread over the input shape even without the regularization. However, for the mid-range of sampling ratios (larger than 4 and smaller than 64) the L b regularization term is crucial. It spreads the generated points over the input point cloud, allowing for better matching and therefore better accuracy when using the sampled points. Turning off the L m component (β = 0) Removing the L m term results in 3.5-fold increase in the maximal distance between the generated points and their matched points, averaged over the test set. This leads to less tight matches, resulting in up to 7% (obtained for k = 16) decrease in classification accuracy when using the sampled points.
13 Coverage error FPS ProgressiveNet ProgressiveNet with L c loss term Sampling ratio (log 2 scale) Figure 14. Adding L c component to the loss. Coverage error is defined as the distance of the next FPS point. We observe that adding the L c component closes most of the gap between FPS and ProgressiveNet. Adding an extra regularization term FPS minimizes a geometric measure, i.e, given k points it minimizes the distance to the k + 1 point. We regard this measure as the coverage error. Our work found it to be an inferior proxy to minimizing the task error. Nonetheless, if in some settings the coverage error is important, we can incorporate it by adding the following loss term to Equation 5: L c (G, P ) = max y P min x G y x 2 2. (9) Figure 14 shows the coverage error as a function of the sampling ratio, for FPS and ProgressiveNet, as well as for ProgressiveNet when trained with the extra L c loss term. We observe that adding the extra term removes most of the coverage error difference between FPS and ProgressiveNet. PointNet s accuracy when using the sampled points did not change substantially when adding the extra term, thus we conclude that it is unnecessary to minimize the coverage error in order to get a sample that is optimized for the task. However, it is not harmful to minimize this error as well, if needed. A.4. Time and space considerations In Section 4.1 we mentioned the influence of S-NET on inference time and memory consumption. This section elaborates on the subject. Table 4 demonstrates how we save most of the inference time by using S-NET for a small increase in memory. When fed with a complete point cloud (with 1024 points), PointNet performs 440M floating point multiplications (FLOPs). When feeding only 16 points, this number drops to 7M. S-NET that samples from 1024 to 16 points requires 35M FLOPs. Cascading them together amounts to 42M FLOPs, which is 90% reduction in inference time, compared to running PointNet on the complete points clouds. S-NET that samples 16 points requires 0.18M parameters, which is only 5% of PointNet s memory requirement. Network #Parameters FLOPs/ point cloud PointNet M 440M PointNet M 7M S-NET M 35M S-NET-16 + PointNet M 42M Table 4. Time and space complexity of S-NET and PointNet. M stands for million. FLOPs stands for number of floating point multiplications. S-NET-16 stands for S-NET with output size of 16 points. S-NET-16 + PointNet-16 stands for sampling 16 points with S-NET and then classifying them with PointNet. Sampling makes for a great reduction in time complexity for a modest price in terms of space complexity. Frequency of set size Critical set size Figure 15. Distribution of critical set sizes for PointNet vanilla over ModelNet40 test set. The critical set size is concentrated around 429 points. A.5. Critical set sampling The critical set, as defined by Qi et al. [1], is the set of points that contributes to the max pooled feature (MPF). A proposed alternative to S-NET might be to extract the critical set and use it as the sampled point cloud. This method has three main disadvantages: first, it does not allow to control the sample size, but only sample to the size of the critical set; Second, each point cloud will be sampled to a different size, since the critical set size is not the same across the dataset, which does not allow efficient processing and storing; Third, the average critical set size of PointNet vanilla on ModelNet40 test set is 429 out of 1024 points (see Figure 15), i.e., approximately 42% of the points, which is equivalent to sampling ratio of about 2.5. On the contrary, S-NET enables control of the sample size and performs well for much larger sampling ratios. This makes the proposed alternative to S-NET not viable. A more plausible alternative might be to sample a subset of the critical set that controls most of the features. To do so, we count the number of features that each point contributes to the max-pooled features and select the k points with most contribution. We denote this process as critical set sampling.
14 Sampling FPS ProgressiveNet Critical set ratio sampling Table 5. Critical set sampling. We compare the classification accuracy of PointNet vanilla for different sampling methods and sampling ratios. Critical set sampling samples the critical points that contribute to the most features to the MPF. This method is competitive for very small sampling ratios, but is not viable for larger sampling ratios. MPF absolute difference Random FPS S-NET Sampling ratio (log 2 scale) Figure 16. Absolute difference of the max pooled feature (MPF). Three sampling methods are compared: random, FPS and S-NET. The difference is averaged over the test set of Model- Net40. The MPF resulting from S-NET s points differs from the original MPF like random and FPS. In Table 5 we compare this sampling method with ProgressiveNet and FPS. We see that critical set sampling performs well for very small sampling ratios, but performs poorly for larger ratios. Relation between our sampling and the critical set In this experiment we measured the percentage of critical set points covered by S-NET s sampled points. We found that S-NET did not cover the critical set more than a random sample. To further investigate this issue, we computed the absolute difference between the MPF when feeding Point- Net with sampled points and with the complete point cloud of 1024 points. The results are shown in Figure 16. S-NET did not learn to sample the critical set. It also did not learn to reproduce the MPF. Instead, it learned to sample points that give better classification results, independently of the critical set. To explain this, we recall that the fully connected layers of PointNet, which process the MPF to infer the classification results, form a non-linear function. In addition, the MPF represents the shape class with redun- airplane bathtub bed bench bookshelf bottle bowl car chair cone cup curtain desk door dresser flower_pot glass_box guitar keyboard lamp laptop mantel monitor night_stand person piano plant radio range_hood sink sofa stairs stool table tent toilet tv_stand vase wardrobe xbox Class accuracy margin Figure 17. Class accuracy margin. PointNet was trained on the complete point clouds (1024 points) and evaluated on sampled point clouds of k = 64 points, using either FPS or S-NET sampling. S-NET achieves better results on 27 classes, with an average margin of 26%, while FPS achieves better results on 8 classes with an average margin of just 6%. dancy (1024 floating point numbers to represent a class out of 40 classes). Thus, it is possible to find several different MPFs that results in the same classification. Therefore, there are multiple sets of points that gives similar classification results. To further stress this point, we evaluated PointNet accuracy on the complementary set of the critical set for each shape, and the accuracy only drops by 1.5%, from 89.2% to 87.7%. We conclude that the critical set is not that critical. A.6. Class accuracy Up to this point we reported instance classification accuracy (also regarded as overall accuracy). Now we analyze the per class accuracy behaviour. Figure 17 shows the per-class difference in accuracy between using 64 S- NET and 64 FPS points. S-NET achieves superior results in 27 out of 40 classes (67.5%) while FPS is better in only 8 classes (20%). The results are equal for the remaining 5 classes. The average margin on the classes with superior S-NET results is 26%, compared to just 6% average margin for the classes with better FPS results. Notably, FPS achieves higher accuracy on the door class with a margin of 15% (80% vs 65%), while S-NET achieves higher accuracy on the car class with a margin of 75% (91% vs 16%).




















15 B. Visual examples Query S-NET-32 top five retrieved CAD Models Plant Query Plant Plant Plant Vase FPS-32 top five retrieved CAD Models Plant Plant Bowl Sofa Plant Sofa Sofa Figure 18. Retrieval example. We compare the top five retrievals from the test set when using 32 sampled points, either by S-NET or FPS. The sampled points were processes by PointNet (that was trained on complete point clouds of 1024 points) and its penultimate layer was used as a shape descriptor. Retrieval was done based on L2 distance on this shape descriptor. S-NET was trained with PointNet for classification, no additional training was done for retrieval. When using S-NET, four out of five retrieved shapes are correct (plant). For FPS, only the fifth retrieved shape is correct. Input 2048 ProgressiveNet 32 Reconstruction Input 2048 Reconstruction ProgressiveNet 64 ProgressiveNet 128 ProgressiveNet 256 Reconstructions from ProgressiveNet sampled points FPS 32 FPS 64 FPS 128 FPS 256 Reconstructions from FPS sampled points Figure 19. Progressive sampling. First and third rows: input point cloud and samples of different sizes by ProgressiveNet and FPS, respectively. Second and fourth rows: reconstruction from the input point cloud and from the corresponding samples. The sampled points are enlarged for visualization purpose. Even at a sample size as low as 64 points, the reconstruction from ProgressiveNet s points is visually similar to the reconstruction from the complete input point cloud. On the contrary, it takes four times more FPS points to achieve this level of similarity.
3D model classification using convolutional neural network
 3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D model classification using convolutional neural network JunYoung Gwak Stanford jgwak@cs.stanford.edu Abstract Our goal is to classify 3D models directly using convolutional neural network. Most of existing
3D Deep Learning on Geometric Forms. Hao Su
 3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
3D Deep Learning on Geometric Forms Hao Su Many 3D representations are available Candidates: multi-view images depth map volumetric polygonal mesh point cloud primitive-based CAD models 3D representation
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space
 PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space Sikai Zhong February 14, 2018 COMPUTER SCIENCE Table of contents 1. PointNet 2. PointNet++ 3. Experiments 1 PointNet Property
Structure-oriented Networks of Shape Collections
 Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material
Structure-oriented Networks of Shape Collections Noa Fish 1 Oliver van Kaick 2 Amit Bermano 3 Daniel Cohen-Or 1 1 Tel Aviv University 2 Carleton University 3 Princeton University 1 pplementary material
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
arxiv: v1 [cs.cv] 27 Jan 2019
![arxiv: v1 [cs.cv] 27 Jan 2019](/thumbs/95/122752774.jpg "arxiv: v1 [cs.cv] 27 Jan 2019") : Euclidean Point Cloud Auto-Encoder and Sampler Edoardo Remelli 1 Pierre Baque 1 Pascal Fua 1 Abstract arxiv:1901.09394v1 [cs.cv] 27 Jan 2019 Most algorithms that rely on deep learning-based approaches
: Euclidean Point Cloud Auto-Encoder and Sampler Edoardo Remelli 1 Pierre Baque 1 Pascal Fua 1 Abstract arxiv:1901.09394v1 [cs.cv] 27 Jan 2019 Most algorithms that rely on deep learning-based approaches
Cross-domain Deep Encoding for 3D Voxels and 2D Images
 Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
Cross-domain Deep Encoding for 3D Voxels and 2D Images Jingwei Ji Stanford University jingweij@stanford.edu Danyang Wang Stanford University danyangw@stanford.edu 1. Introduction 3D reconstruction is one
arxiv: v1 [cs.cv] 30 Sep 2018
![arxiv: v1 [cs.cv] 30 Sep 2018](/thumbs/89/99613806.jpg "arxiv: v1 [cs.cv] 30 Sep 2018") 3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
3D-PSRNet: Part Segmented 3D Point Cloud Reconstruction From a Single Image Priyanka Mandikal, Navaneet K L, and R. Venkatesh Babu arxiv:1810.00461v1 [cs.cv] 30 Sep 2018 Indian Institute of Science, Bangalore,
CS468: 3D Deep Learning on Point Cloud Data. class label part label. Hao Su. image. May 10, 2017
 CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
CS468: 3D Deep Learning on Point Cloud Data class label part label Hao Su image. May 10, 2017 Agenda Point cloud generation Point cloud analysis CVPR 17, Point Set Generation Pipeline render CVPR 17, Point
Learning to Match. Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li
 Learning to Match Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li 1. Introduction The main tasks in many applications can be formalized as matching between heterogeneous objects, including search, recommendation,
Learning to Match Jun Xu, Zhengdong Lu, Tianqi Chen, Hang Li 1. Introduction The main tasks in many applications can be formalized as matching between heterogeneous objects, including search, recommendation,
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY
 MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
MULTI-LEVEL 3D CONVOLUTIONAL NEURAL NETWORK FOR OBJECT RECOGNITION SAMBIT GHADAI XIAN LEE ADITYA BALU SOUMIK SARKAR ADARSH KRISHNAMURTHY Outline Object Recognition Multi-Level Volumetric Representations
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation. Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas
 PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
PointNet: Deep Learning on Point Sets for 3D Classification and Segmentation Charles R. Qi* Hao Su* Kaichun Mo Leonidas J. Guibas Big Data + Deep Representation Learning Robot Perception Augmented Reality
arxiv: v1 [cs.cv] 28 Nov 2018
![arxiv: v1 [cs.cv] 28 Nov 2018](/thumbs/91/104803963.jpg "arxiv: v1 [cs.cv] 28 Nov 2018") MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
MeshNet: Mesh Neural Network for 3D Shape Representation Yutong Feng, 1 Yifan Feng, 2 Haoxuan You, 1 Xibin Zhao 1, Yue Gao 1 1 BNRist, KLISS, School of Software, Tsinghua University, China. 2 School of
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material
 SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
SurfNet: Generating 3D shape surfaces using deep residual networks-supplementary Material Ayan Sinha MIT Asim Unmesh IIT Kanpur Qixing Huang UT Austin Karthik Ramani Purdue sinhayan@mit.edu a.unmesh@gmail.com
Supplementary A. Overview. C. Time and Space Complexity. B. Shape Retrieval. D. Permutation Invariant SOM. B.1. Dataset
 Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
Supplementary A. Overview This supplementary document provides more technical details and experimental results to the main paper. Shape retrieval experiments are demonstrated with ShapeNet Core55 dataset
Supplementary Material for Ensemble Diffusion for Retrieval
 Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Supplementary Material for Ensemble Diffusion for Retrieval Song Bai 1, Zhichao Zhou 1, Jingdong Wang, Xiang Bai 1, Longin Jan Latecki 3, Qi Tian 4 1 Huazhong University of Science and Technology, Microsoft
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Deep Learning. Vladimir Golkov Technical University of Munich Computer Vision Group
 Deep Learning Vladimir Golkov Technical University of Munich Computer Vision Group 1D Input, 1D Output target input 2 2D Input, 1D Output: Data Distribution Complexity Imagine many dimensions (data occupies
Deep Learning Vladimir Golkov Technical University of Munich Computer Vision Group 1D Input, 1D Output target input 2 2D Input, 1D Output: Data Distribution Complexity Imagine many dimensions (data occupies
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos
 Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Supplementary Material: Unsupervised Domain Adaptation for Face Recognition in Unlabeled Videos Kihyuk Sohn 1 Sifei Liu 2 Guangyu Zhong 3 Xiang Yu 1 Ming-Hsuan Yang 2 Manmohan Chandraker 1,4 1 NEC Labs
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
POINT CLOUD DEEP LEARNING
 POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
POINT CLOUD DEEP LEARNING Innfarn Yoo, 3/29/28 / 57 Introduction AGENDA Previous Work Method Result Conclusion 2 / 57 INTRODUCTION 3 / 57 2D OBJECT CLASSIFICATION Deep Learning for 2D Object Classification
Novel Lossy Compression Algorithms with Stacked Autoencoders
 Novel Lossy Compression Algorithms with Stacked Autoencoders Anand Atreya and Daniel O Shea {aatreya, djoshea}@stanford.edu 11 December 2009 1. Introduction 1.1. Lossy compression Lossy compression is
Novel Lossy Compression Algorithms with Stacked Autoencoders Anand Atreya and Daniel O Shea {aatreya, djoshea}@stanford.edu 11 December 2009 1. Introduction 1.1. Lossy compression Lossy compression is
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection
 Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Using the Deformable Part Model with Autoencoded Feature Descriptors for Object Detection Hyunghoon Cho and David Wu December 10, 2010 1 Introduction Given its performance in recent years' PASCAL Visual
Clustering and Unsupervised Anomaly Detection with l 2 Normalized Deep Auto-Encoder Representations
 Clustering and Unsupervised Anomaly Detection with l 2 Normalized Deep Auto-Encoder Representations Caglar Aytekin, Xingyang Ni, Francesco Cricri and Emre Aksu Nokia Technologies, Tampere, Finland Corresponding
Clustering and Unsupervised Anomaly Detection with l 2 Normalized Deep Auto-Encoder Representations Caglar Aytekin, Xingyang Ni, Francesco Cricri and Emre Aksu Nokia Technologies, Tampere, Finland Corresponding
COMP 551 Applied Machine Learning Lecture 16: Deep Learning
 COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
COMP 551 Applied Machine Learning Lecture 16: Deep Learning Instructor: Ryan Lowe (ryan.lowe@cs.mcgill.ca) Slides mostly by: Class web page: www.cs.mcgill.ca/~hvanho2/comp551 Unless otherwise noted, all
An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks
 An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks Report for Undergraduate Project - CS396A Vinayak Tantia (Roll No: 14805) Guide: Prof Gaurav Sharma CSE, IIT Kanpur, India
An Empirical Study of Generative Adversarial Networks for Computer Vision Tasks Report for Undergraduate Project - CS396A Vinayak Tantia (Roll No: 14805) Guide: Prof Gaurav Sharma CSE, IIT Kanpur, India
arxiv: v1 [cs.cv] 27 Nov 2018 Abstract
![arxiv: v1 [cs.cv] 27 Nov 2018 Abstract](/thumbs/91/105025156.jpg "arxiv: v1 [cs.cv] 27 Nov 2018 Abstract") Iterative Transformer Network for 3D Point Cloud Wentao Yuan David Held Christoph Mertz Martial Hebert The Robotics Institute Carnegie Mellon University {wyuan1, dheld, cmertz, mhebert}@cs.cmu.edu arxiv:1811.11209v1
Iterative Transformer Network for 3D Point Cloud Wentao Yuan David Held Christoph Mertz Martial Hebert The Robotics Institute Carnegie Mellon University {wyuan1, dheld, cmertz, mhebert}@cs.cmu.edu arxiv:1811.11209v1
Transfer Learning. Style Transfer in Deep Learning
 Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Transfer Learning & Style Transfer in Deep Learning 4-DEC-2016 Gal Barzilai, Ram Machlev Deep Learning Seminar School of Electrical Engineering Tel Aviv University Part 1: Transfer Learning in Deep Learning
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Deep Learning for Computer Vision II
 IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
IIIT Hyderabad Deep Learning for Computer Vision II C. V. Jawahar Paradigm Shift Feature Extraction (SIFT, HoG, ) Part Models / Encoding Classifier Sparrow Feature Learning Classifier Sparrow L 1 L 2 L
Photo-realistic Renderings for Machines Seong-heum Kim
 Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Photo-realistic Renderings for Machines 20105034 Seong-heum Kim CS580 Student Presentations 2016.04.28 Photo-realistic Renderings for Machines Scene radiances Model descriptions (Light, Shape, Material,
Unsupervised Learning
 Deep Learning for Graphics Unsupervised Learning Niloy Mitra Iasonas Kokkinos Paul Guerrero Vladimir Kim Kostas Rematas Tobias Ritschel UCL UCL/Facebook UCL Adobe Research U Washington UCL Timetable Niloy
Deep Learning for Graphics Unsupervised Learning Niloy Mitra Iasonas Kokkinos Paul Guerrero Vladimir Kim Kostas Rematas Tobias Ritschel UCL UCL/Facebook UCL Adobe Research U Washington UCL Timetable Niloy
Arbitrary Style Transfer in Real-Time with Adaptive Instance Normalization. Presented by: Karen Lucknavalai and Alexandr Kuznetsov
 Arbitrary Style Transfer in Real-Time with Adaptive Instance Normalization Presented by: Karen Lucknavalai and Alexandr Kuznetsov Example Style Content Result Motivation Transforming content of an image
Arbitrary Style Transfer in Real-Time with Adaptive Instance Normalization Presented by: Karen Lucknavalai and Alexandr Kuznetsov Example Style Content Result Motivation Transforming content of an image
Restricted Boltzmann Machines. Shallow vs. deep networks. Stacked RBMs. Boltzmann Machine learning: Unsupervised version
 Shallow vs. deep networks Restricted Boltzmann Machines Shallow: one hidden layer Features can be learned more-or-less independently Arbitrary function approximator (with enough hidden units) Deep: two
Shallow vs. deep networks Restricted Boltzmann Machines Shallow: one hidden layer Features can be learned more-or-less independently Arbitrary function approximator (with enough hidden units) Deep: two
CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS
 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS CHAPTER 4 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS 4.1 Introduction Optical character recognition is one of
CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS CHAPTER 4 CLASSIFICATION WITH RADIAL BASIS AND PROBABILISTIC NEURAL NETWORKS 4.1 Introduction Optical character recognition is one of
Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval
 Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval Alexandr Notchenko, Ermek Kapushev, Evgeny Burnaev {avnotchenko,kapushev,burnaevevgeny}@gmail.com Skolkovo Institute of Science and
Sparse 3D Convolutional Neural Networks for Large-Scale Shape Retrieval Alexandr Notchenko, Ermek Kapushev, Evgeny Burnaev {avnotchenko,kapushev,burnaevevgeny}@gmail.com Skolkovo Institute of Science and
An efficient face recognition algorithm based on multi-kernel regularization learning
 Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
Acta Technica 61, No. 4A/2016, 75 84 c 2017 Institute of Thermomechanics CAS, v.v.i. An efficient face recognition algorithm based on multi-kernel regularization learning Bi Rongrong 1 Abstract. A novel
MTTTS17 Dimensionality Reduction and Visualization. Spring 2018 Jaakko Peltonen. Lecture 11: Neighbor Embedding Methods continued
 MTTTS17 Dimensionality Reduction and Visualization Spring 2018 Jaakko Peltonen Lecture 11: Neighbor Embedding Methods continued This Lecture Neighbor embedding by generative modeling Some supervised neighbor
MTTTS17 Dimensionality Reduction and Visualization Spring 2018 Jaakko Peltonen Lecture 11: Neighbor Embedding Methods continued This Lecture Neighbor embedding by generative modeling Some supervised neighbor
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models
 One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
One Network to Solve Them All Solving Linear Inverse Problems using Deep Projection Models [Supplemental Materials] 1. Network Architecture b ref b ref +1 We now describe the architecture of the networks
Multi-Glance Attention Models For Image Classification
 Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
GLOBAL SAMPLING OF IMAGE EDGES. Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas
 GLOBAL SAMPLING OF IMAGE EDGES Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece {dgerogia,cnikou,arly}@cs.uoi.gr
GLOBAL SAMPLING OF IMAGE EDGES Demetrios P. Gerogiannis, Christophoros Nikou, Aristidis Likas Department of Computer Science and Engineering, University of Ioannina, 45110 Ioannina, Greece {dgerogia,cnikou,arly}@cs.uoi.gr
Accelerometer Gesture Recognition
 Accelerometer Gesture Recognition Michael Xie xie@cs.stanford.edu David Pan napdivad@stanford.edu December 12, 2014 Abstract Our goal is to make gesture-based input for smartphones and smartwatches accurate
Accelerometer Gesture Recognition Michael Xie xie@cs.stanford.edu David Pan napdivad@stanford.edu December 12, 2014 Abstract Our goal is to make gesture-based input for smartphones and smartwatches accurate
Learning Adversarial 3D Model Generation with 2D Image Enhancer
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Learning Adversarial 3D Model Generation with 2D Image Enhancer Jing Zhu, Jin Xie, Yi Fang NYU Multimedia and Visual Computing Lab
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) Learning Adversarial 3D Model Generation with 2D Image Enhancer Jing Zhu, Jin Xie, Yi Fang NYU Multimedia and Visual Computing Lab
Geometric Modeling and Processing
 Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Geometric Modeling and Processing Tutorial of 3DIM&PVT 2011 (Hangzhou, China) May 16, 2011 6. Mesh Simplification Problems High resolution meshes becoming increasingly available 3D active scanners Computer
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
arxiv: v1 [cs.cv] 20 Dec 2016
![arxiv: v1 [cs.cv] 20 Dec 2016](/thumbs/73/68905842.jpg "arxiv: v1 [cs.cv] 20 Dec 2016") End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
End-to-End Pedestrian Collision Warning System based on a Convolutional Neural Network with Semantic Segmentation arxiv:1612.06558v1 [cs.cv] 20 Dec 2016 Heechul Jung heechul@dgist.ac.kr Min-Kook Choi mkchoi@dgist.ac.kr
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching
 Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Geometric Registration for Deformable Shapes 3.3 Advanced Global Matching Correlated Correspondences [ASP*04] A Complete Registration System [HAW*08] In this session Advanced Global Matching Some practical
Real-time convolutional networks for sonar image classification in low-power embedded systems
 Real-time convolutional networks for sonar image classification in low-power embedded systems Matias Valdenegro-Toro Ocean Systems Laboratory - School of Engineering & Physical Sciences Heriot-Watt University,
Real-time convolutional networks for sonar image classification in low-power embedded systems Matias Valdenegro-Toro Ocean Systems Laboratory - School of Engineering & Physical Sciences Heriot-Watt University,
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network
 Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network Xinhai Liu, Zhizhong Han,2, Yu-Shen Liu, Matthias Zwicker 2 School of Software,
Point2Sequence: Learning the Shape Representation of 3D Point Clouds with an Attention-based Sequence to Sequence Network Xinhai Liu, Zhizhong Han,2, Yu-Shen Liu, Matthias Zwicker 2 School of Software,
Research on Pruning Convolutional Neural Network, Autoencoder and Capsule Network
 Research on Pruning Convolutional Neural Network, Autoencoder and Capsule Network Tianyu Wang Australia National University, Colledge of Engineering and Computer Science u@anu.edu.au Abstract. Some tasks,
Research on Pruning Convolutional Neural Network, Autoencoder and Capsule Network Tianyu Wang Australia National University, Colledge of Engineering and Computer Science u@anu.edu.au Abstract. Some tasks,
CPSC 340: Machine Learning and Data Mining. Deep Learning Fall 2016
 CPSC 340: Machine Learning and Data Mining Deep Learning Fall 2016 Assignment 5: Due Friday. Assignment 6: Due next Friday. Final: Admin December 12 (8:30am HEBB 100) Covers Assignments 1-6. Final from
CPSC 340: Machine Learning and Data Mining Deep Learning Fall 2016 Assignment 5: Due Friday. Assignment 6: Due next Friday. Final: Admin December 12 (8:30am HEBB 100) Covers Assignments 1-6. Final from
Su et al. Shape Descriptors - III
 Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Su et al. Shape Descriptors - III Siddhartha Chaudhuri http://www.cse.iitb.ac.in/~cs749 Funkhouser; Feng, Liu, Gong Recap Global A shape descriptor is a set of numbers that describes a shape in a way that
Facial Expression Classification with Random Filters Feature Extraction
 Facial Expression Classification with Random Filters Feature Extraction Mengye Ren Facial Monkey mren@cs.toronto.edu Zhi Hao Luo It s Me lzh@cs.toronto.edu I. ABSTRACT In our work, we attempted to tackle
Facial Expression Classification with Random Filters Feature Extraction Mengye Ren Facial Monkey mren@cs.toronto.edu Zhi Hao Luo It s Me lzh@cs.toronto.edu I. ABSTRACT In our work, we attempted to tackle
Robust PDF Table Locator
 Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Robust PDF Table Locator December 17, 2016 1 Introduction Data scientists rely on an abundance of tabular data stored in easy-to-machine-read formats like.csv files. Unfortunately, most government records
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Alternatives to Direct Supervision
 CreativeAI: Deep Learning for Graphics Alternatives to Direct Supervision Niloy Mitra Iasonas Kokkinos Paul Guerrero Nils Thuerey Tobias Ritschel UCL UCL UCL TUM UCL Timetable Theory and Basics State of
CreativeAI: Deep Learning for Graphics Alternatives to Direct Supervision Niloy Mitra Iasonas Kokkinos Paul Guerrero Nils Thuerey Tobias Ritschel UCL UCL UCL TUM UCL Timetable Theory and Basics State of
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Deep Learning. Visualizing and Understanding Convolutional Networks. Christopher Funk. Pennsylvania State University.
 Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
Visualizing and Understanding Convolutional Networks Christopher Pennsylvania State University February 23, 2015 Some Slide Information taken from Pierre Sermanet (Google) presentation on and Computer
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Deep Learning. Volker Tresp Summer 2014
 Deep Learning Volker Tresp Summer 2014 1 Neural Network Winter and Revival While Machine Learning was flourishing, there was a Neural Network winter (late 1990 s until late 2000 s) Around 2010 there
Deep Learning Volker Tresp Summer 2014 1 Neural Network Winter and Revival While Machine Learning was flourishing, there was a Neural Network winter (late 1990 s until late 2000 s) Around 2010 there
Neural Networks. CE-725: Statistical Pattern Recognition Sharif University of Technology Spring Soleymani
 Neural Networks CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Biological and artificial neural networks Feed-forward neural networks Single layer
Neural Networks CE-725: Statistical Pattern Recognition Sharif University of Technology Spring 2013 Soleymani Outline Biological and artificial neural networks Feed-forward neural networks Single layer
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks
 Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
Show, Discriminate, and Tell: A Discriminatory Image Captioning Model with Deep Neural Networks Zelun Luo Department of Computer Science Stanford University zelunluo@stanford.edu Te-Lin Wu Department of
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
arxiv: v1 [cs.cv] 2 Sep 2018
![arxiv: v1 [cs.cv] 2 Sep 2018](/thumbs/85/92128474.jpg "arxiv: v1 [cs.cv] 2 Sep 2018") Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
Natural Language Person Search Using Deep Reinforcement Learning Ankit Shah Language Technologies Institute Carnegie Mellon University aps1@andrew.cmu.edu Tyler Vuong Electrical and Computer Engineering
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
3D Deep Learning
 3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
3D Deep Learning Tutorial@CVPR2017 Hao Su (UCSD) Leonidas Guibas (Stanford) Michael Bronstein (Università della Svizzera Italiana) Evangelos Kalogerakis (UMass) Jimei Yang (Adobe Research) Charles Qi (Stanford)
3D Shape Analysis with Multi-view Convolutional Networks. Evangelos Kalogerakis
 3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
3D Shape Analysis with Multi-view Convolutional Networks Evangelos Kalogerakis 3D model repositories [3D Warehouse - video] 3D geometry acquisition [KinectFusion - video] 3D shapes come in various flavors
CS231N Project Final Report - Fast Mixed Style Transfer
 CS231N Project Final Report - Fast Mixed Style Transfer Xueyuan Mei Stanford University Computer Science xmei9@stanford.edu Fabian Chan Stanford University Computer Science fabianc@stanford.edu Tianchang
CS231N Project Final Report - Fast Mixed Style Transfer Xueyuan Mei Stanford University Computer Science xmei9@stanford.edu Fabian Chan Stanford University Computer Science fabianc@stanford.edu Tianchang
Stacked Denoising Autoencoders for Face Pose Normalization
 Stacked Denoising Autoencoders for Face Pose Normalization Yoonseop Kang 1, Kang-Tae Lee 2,JihyunEun 2, Sung Eun Park 2 and Seungjin Choi 1 1 Department of Computer Science and Engineering Pohang University
Stacked Denoising Autoencoders for Face Pose Normalization Yoonseop Kang 1, Kang-Tae Lee 2,JihyunEun 2, Sung Eun Park 2 and Seungjin Choi 1 1 Department of Computer Science and Engineering Pohang University
Machine Learning. The Breadth of ML Neural Networks & Deep Learning. Marc Toussaint. Duy Nguyen-Tuong. University of Stuttgart
 Machine Learning The Breadth of ML Neural Networks & Deep Learning Marc Toussaint University of Stuttgart Duy Nguyen-Tuong Bosch Center for Artificial Intelligence Summer 2017 Neural Networks Consider
Machine Learning The Breadth of ML Neural Networks & Deep Learning Marc Toussaint University of Stuttgart Duy Nguyen-Tuong Bosch Center for Artificial Intelligence Summer 2017 Neural Networks Consider
arxiv: v1 [cs.cv] 27 Dec 2018
![arxiv: v1 [cs.cv] 27 Dec 2018](/thumbs/93/111591852.jpg "arxiv: v1 [cs.cv] 27 Dec 2018") Ground Truth Our Result Input Shape with Desired Part Shape to Modify Cut-and-Paste Our Replacement 3D Point-Capsule Networks arxiv:1812.10775v1 [cs.cv] 27 Dec 2018 Yongheng Zhao Tolga Birdal * Haowen
Ground Truth Our Result Input Shape with Desired Part Shape to Modify Cut-and-Paste Our Replacement 3D Point-Capsule Networks arxiv:1812.10775v1 [cs.cv] 27 Dec 2018 Yongheng Zhao Tolga Birdal * Haowen
arxiv: v4 [cs.cv] 29 Mar 2019
![arxiv: v4 [cs.cv] 29 Mar 2019](/thumbs/96/128038877.jpg "arxiv: v4 [cs.cv] 29 Mar 2019") PartNet: A Recursive Part Decomposition Network for Fine-grained and Hierarchical Shape Segmentation Fenggen Yu 1 Kun Liu 1 * Yan Zhang 1 Chenyang Zhu 2 Kai Xu 2 1 Nanjing University 2 National University
PartNet: A Recursive Part Decomposition Network for Fine-grained and Hierarchical Shape Segmentation Fenggen Yu 1 Kun Liu 1 * Yan Zhang 1 Chenyang Zhu 2 Kai Xu 2 1 Nanjing University 2 National University
End-To-End Spam Classification With Neural Networks
 End-To-End Spam Classification With Neural Networks Christopher Lennan, Bastian Naber, Jan Reher, Leon Weber 1 Introduction A few years ago, the majority of the internet s network traffic was due to spam
End-To-End Spam Classification With Neural Networks Christopher Lennan, Bastian Naber, Jan Reher, Leon Weber 1 Introduction A few years ago, the majority of the internet s network traffic was due to spam
arxiv: v1 [cs.cv] 5 Jul 2017
![arxiv: v1 [cs.cv] 5 Jul 2017](/thumbs/95/123923253.jpg "arxiv: v1 [cs.cv] 5 Jul 2017") AlignGAN: Learning to Align Cross- Images with Conditional Generative Adversarial Networks Xudong Mao Department of Computer Science City University of Hong Kong xudonmao@gmail.com Qing Li Department of
AlignGAN: Learning to Align Cross- Images with Conditional Generative Adversarial Networks Xudong Mao Department of Computer Science City University of Hong Kong xudonmao@gmail.com Qing Li Department of
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material
 Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Deep Supervision with Shape Concepts for Occlusion-Aware 3D Object Parsing Supplementary Material Chi Li, M. Zeeshan Zia 2, Quoc-Huy Tran 2, Xiang Yu 2, Gregory D. Hager, and Manmohan Chandraker 2 Johns
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
CNN for Low Level Image Processing. Huanjing Yue
 CNN for Low Level Image Processing Huanjing Yue 2017.11 1 Deep Learning for Image Restoration General formulation: min Θ L( x, x) s. t. x = F(y; Θ) Loss function Parameters to be learned Key issues The
CNN for Low Level Image Processing Huanjing Yue 2017.11 1 Deep Learning for Image Restoration General formulation: min Θ L( x, x) s. t. x = F(y; Θ) Loss function Parameters to be learned Key issues The
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling
 Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Locally Weighted Least Squares Regression for Image Denoising, Reconstruction and Up-sampling Moritz Baecher May 15, 29 1 Introduction Edge-preserving smoothing and super-resolution are classic and important
Feature Extractors. CS 188: Artificial Intelligence Fall Nearest-Neighbor Classification. The Perceptron Update Rule.
 CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
CS 188: Artificial Intelligence Fall 2007 Lecture 26: Kernels 11/29/2007 Dan Klein UC Berkeley Feature Extractors A feature extractor maps inputs to feature vectors Dear Sir. First, I must solicit your
A Novel Image Super-resolution Reconstruction Algorithm based on Modified Sparse Representation
 , pp.162-167 http://dx.doi.org/10.14257/astl.2016.138.33 A Novel Image Super-resolution Reconstruction Algorithm based on Modified Sparse Representation Liqiang Hu, Chaofeng He Shijiazhuang Tiedao University,
, pp.162-167 http://dx.doi.org/10.14257/astl.2016.138.33 A Novel Image Super-resolution Reconstruction Algorithm based on Modified Sparse Representation Liqiang Hu, Chaofeng He Shijiazhuang Tiedao University,
Lab meeting (Paper review session) Stacked Generative Adversarial Networks
 Stacked Generative Adversarial Networks") Lab meeting (Paper review session) Stacked Generative Adversarial Networks 2017. 02. 01. Saehoon Kim (Ph. D. candidate) Machine Learning Group Papers to be covered Stacked Generative Adversarial Networks
Lab meeting (Paper review session) Stacked Generative Adversarial Networks 2017. 02. 01. Saehoon Kim (Ph. D. candidate) Machine Learning Group Papers to be covered Stacked Generative Adversarial Networks
3D Shape Segmentation with Projective Convolutional Networks
 3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
3D Shape Segmentation with Projective Convolutional Networks Evangelos Kalogerakis 1 Melinos Averkiou 2 Subhransu Maji 1 Siddhartha Chaudhuri 3 1 University of Massachusetts Amherst 2 University of Cyprus
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks
 Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Deep Tracking: Biologically Inspired Tracking with Deep Convolutional Networks Si Chen The George Washington University sichen@gwmail.gwu.edu Meera Hahn Emory University mhahn7@emory.edu Mentor: Afshin
Neural Network Optimization and Tuning / Spring 2018 / Recitation 3
 Neural Network Optimization and Tuning 11-785 / Spring 2018 / Recitation 3 1 Logistics You will work through a Jupyter notebook that contains sample and starter code with explanations and comments throughout.
Neural Network Optimization and Tuning 11-785 / Spring 2018 / Recitation 3 1 Logistics You will work through a Jupyter notebook that contains sample and starter code with explanations and comments throughout.
Eye Detection by Haar wavelets and cascaded Support Vector Machine
 Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Eye Detection by Haar wavelets and cascaded Support Vector Machine Vishal Agrawal B.Tech 4th Year Guide: Simant Dubey / Amitabha Mukherjee Dept of Computer Science and Engineering IIT Kanpur - 208 016
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation
 Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Large-Scale Traffic Sign Recognition based on Local Features and Color Segmentation M. Blauth, E. Kraft, F. Hirschenberger, M. Böhm Fraunhofer Institute for Industrial Mathematics, Fraunhofer-Platz 1,
Dynamic Routing Between Capsules
 Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Report Explainable Machine Learning Dynamic Routing Between Capsules Author: Michael Dorkenwald Supervisor: Dr. Ullrich Köthe 28. Juni 2018 Inhaltsverzeichnis 1 Introduction 2 2 Motivation 2 3 CapusleNet
Large Mesh Deformation Using the Volumetric Graph Laplacian
 Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Large Mesh Deformation Using the Volumetric Graph Laplacian Kun Zhou1 Jin Huang2 John Snyder3 Xinguo Liu1 Hujun Bao2 Baining Guo1 Heung-Yeung Shum1 1 Microsoft Research Asia 2 Zhejiang University 3 Microsoft
Learning based face hallucination techniques: A survey
 Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Vol. 3 (2014-15) pp. 37-45. : A survey Premitha Premnath K Department of Computer Science & Engineering Vidya Academy of Science & Technology Thrissur - 680501, Kerala, India (email: premithakpnath@gmail.com)
Example-Based Image Super-Resolution Techniques
 Example-Based Image Super-Resolution Techniques Mark Sabini msabini & Gili Rusak gili December 17, 2016 1 Introduction With the current surge in popularity of imagebased applications, improving content
Example-Based Image Super-Resolution Techniques Mark Sabini msabini & Gili Rusak gili December 17, 2016 1 Introduction With the current surge in popularity of imagebased applications, improving content
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs
 In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
In-Place Activated BatchNorm for Memory- Optimized Training of DNNs Samuel Rota Bulò, Lorenzo Porzi, Peter Kontschieder Mapillary Research Paper: https://arxiv.org/abs/1712.02616 Code: https://github.com/mapillary/inplace_abn
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Supplementary material for Analyzing Filters Toward Efficient ConvNet
 Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
Supplementary material for Analyzing Filters Toward Efficient Net Takumi Kobayashi National Institute of Advanced Industrial Science and Technology, Japan takumi.kobayashi@aist.go.jp A. Orthonormal Steerable
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Elastic Neural Networks for Classification
 Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3
Elastic Neural Networks for Classification Yi Zhou 1, Yue Bai 1, Shuvra S. Bhattacharyya 1, 2 and Heikki Huttunen 1 1 Tampere University of Technology, Finland, 2 University of Maryland, USA arxiv:1810.00589v3