Crowd simulation. Summerschool Utrecht: Multidisciplinary Game Research. Dr. Roland Geraerts 23 August 2017
|
|
|
- Allan Reynolds
- 5 years ago
- Views:
Transcription



1 Crowd simulation Summerschool Utrecht: Multidisciplinary Game Research Dr. Roland Geraerts 23 August



2 Societal relevance of crowd simulation The number of environments with big crowds are growing In how much time can a train station be evacuated? Where and how can potential dangerous situations appear? How can a city accommodate 0.5M people during an event? How can we populate a game world with a believable crowd? Love Parade deaths 510 injuries 2
3 A computational model of human navigation Challenge: Unify dispersed models for realistic, individual, small group, and collective human movements in interactive, heterogeneous environments. Dispersed models Agent-based: individuals, but problems with high densities Flow-based: no individuals, but good for high densities Realistic movements Comprise collaboration, smooth and energy-efficient movement, collision avoidance, and dealing with unrealistic congestions. Interactive environment Geometry can change dynamically, and the crowd reacts to it. Heterogeneous environment People need to take logical, distinct, and realistic paths over heterogeneous terrains in the environment. 3
4 4 Are we there yet?



5 Some results Optimizing pedestrian streams in the Tour de France Studying optimal light situations in smoky environments Evacuation studies in metro stations of the North/Southline 5
6 6 How can we simulate a crowd?
7 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 7
8 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 8



9 Representation of the traversable environment Requirements Path existence 100% coverage of the navigable space All cycles Fast computation and small storage Fast query time during simulation Flexible: surfaces instead of graphs 9

10 Representing 2D environments What is the best representation for the walkable space of an environment? Inspiration from fungus cultures Voronoi diagram 11

11 Representing 2D environments What is the best representation for the walkable space of an environment? leads to an efficient data structure: a navigation mesh 12

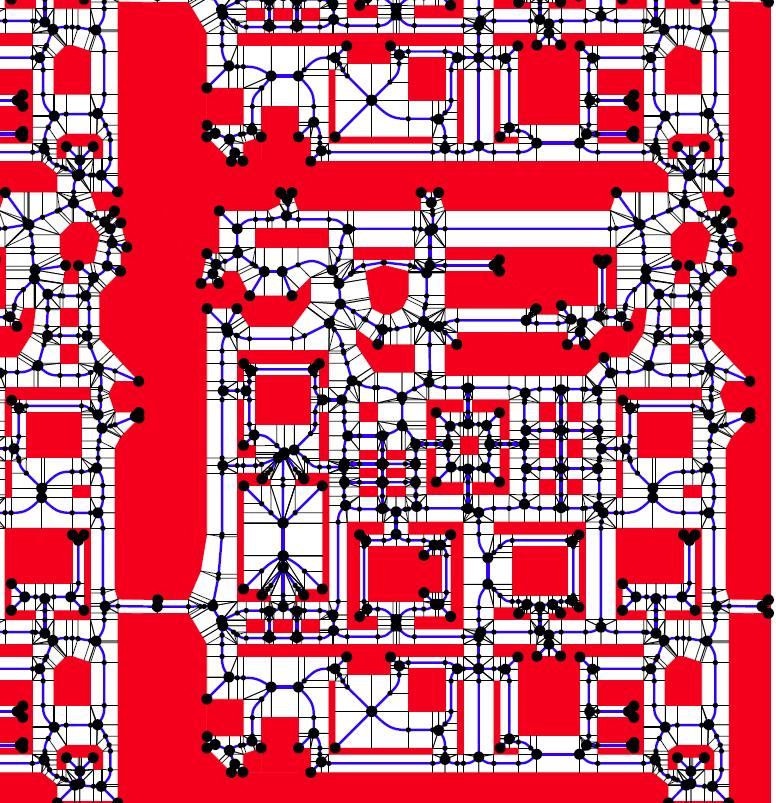
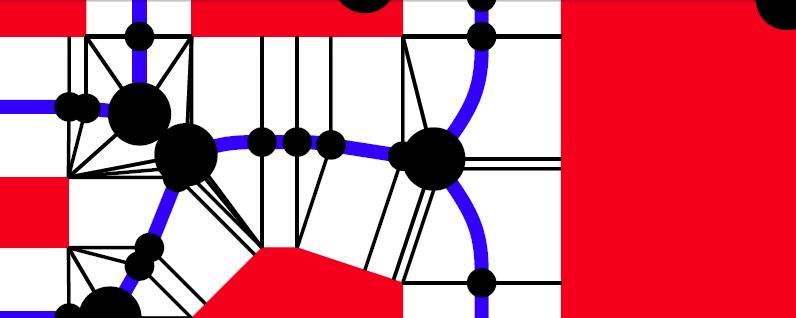
12 Representing 2D environments Can be huge E.g. 1 km 2 Fast to compute 13


13 What about 3D environments? 3D Voronoi diagram? No create a multi-layered Voronoi diagram M. Hemmer, O. Setter, and D. Halperin. Constructing the Exact Voronoi Diagram of Arbitrary Lines in Space with Fast Point-Location. RR-7273, INRIA. 2010, pp
14 What about 3D environments? Preprocessing steps that extract the walkable areas Input environment 15

15 What about 3D environments? Preprocessing steps that extract the walkable areas 1. Remove steep polygons 16
16 What about 3D environments? Preprocessing steps that extract the walkable areas 2. Remove small regions 17
17 What about 3D environments? Preprocessing steps that extract the walkable areas 3. Check vertical clearance (using all geometry) 18
18 What about 3D environments? Preprocessing steps that extract the walkable areas 4. Simplify triangulation 19
19 What about 3D environments? Preprocessing steps that extract the walkable areas 5. Separate into layers 20

20 What about 3D environments? 6. For each 2D layer, create a 2D navigation mesh 7. Stitch them together into a multi-layered navigation mesh 21 Van Toll et al, 2017: The Explicit Corridor Map A Medial Axis-Based Navigation Mesh for Multi-Layered Env.



21 Representation of the traversable environment Can be really huge E.g. many km 2 22 Van Toll et al, 2017: The Medial Axis of a Multi-Layered Environment and its Application as a Navigation Mesh

 O(1) 2D algorithms usually work in multi-layered environments 23")
22 Representation of the traversable environment Multi-layered navigation mesh Allows fast extraction of global routes and final paths Nice mathematical properties Fast to compute Small data structure Nearest obstacle computation O(n log n log k), with k connections O(n) O(1) 2D algorithms usually work in multi-layered environments 23

23 Representation of the traversable environment Handles dynamic changes 24 Van Toll et al, 2012: A Navigation Mesh for Dynamic Environments
24 25 Path planning errors in games

25 Crowd simulation Given this representation, how can we simulate a crowd? 26
26 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 27


27 Action planning Splits up a task into geometric queries Example: dynamic updates of the crowd Standard behavior: pedestrians take the same gate Improved behavior: pedestrians choose between different gates 28 M. Koenis, 2016: Impact of Pedestrians Bringing Along Their Bicycles on Evacuation Times of Subway Stations

28 Action planning Splits up a task into geometric queries Example: Dynamic updates of the crowd 29 Van Toll et al, 2015: Dynamically Pruned A* for Re-planning in Navigation Meshes
29 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 30


30 Indicative Routes A path planning algorithm should NOT compute a path A one-dimensional path limits the character s freedom Humans don t do that either It should produce An Indicative/Preferred Route Guides character to goal 31

31 Computing Indicative Routes Shortest path with clearance to obstacles 32 Jaklin et al, 2014: Computing High-Quality Paths in Weighted Regions
32 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 33

33 Traversing the routes Modified Indicative Routes And Navigation (MIRAN) Supports heterogeneous terrains separate character profiles customized smoothing 34 Jaklin et al, 2013: Real-Time Path Planning in Heterogeneous Environments
34 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 35

35 What is realistic collision-avoidance behavior? Smack the pony s01x02 36

36 What is realistic collision-avoidance behavior? Crowd prank in Japan 37

37 Adapting the routes: Collision avoidance Our model is derived from experiments in the MOCAP lab PhD students: Wouter van Toll and Norman Jaklin 38

38 Adapting the routes: Collision avoidance Our model slightly adjusts the people s movements 39 Karamouzas et al, 2009: A Predictive Collision Avoidance Model for Pedestrian Simulation

39 Adapting the routes: Social groups The group members stay close and visible to each other 40 Kremyzas et al, 2016: Towards Social Behavior in Virtual-Agent Navigation

40 Adapting the routes: Moving through a dense crowd People can make room for a passing individual 41 Stüvel et al, 2017: Torso crowds

41 Adapting the routes: Unification of individual and collective movements Our stream-based model allows local coordination, based on a character s incentive Deviation from the local flow Local density Internal motivation Spent time to reach goal 42 Van Goethem et al, 2015: On Streams and Incentives: A Synthesis of Individual and Collective Crowd Motion
42 So what is realistic collision avoidance? Rush Hour; by Fernando Livschitz 43
43 Crowd simulation framework Representation environment Level 5 Plans actions Level 4 Creates indicative routes Level 3 Traverses the routes Yields speed/direction pairs Level 2 Adapts routes E.g. to avoid collisions Level 1 Moves the characters Representation of the environment Level 5 Level 4 Level 3 Level 2 Level 1 High-level planning Global route Simulation step Route following Local movement Animation start/goal positions indicative route preferred velocity velocity 44

44 Crowd management Collect much information, study many scenario s 46 Van Goethem et al, 2015: On Streams and Incentives: A Synthesis of Individual and Collective Crowd Motion




45 Crowd safety measure, and act. But what should we measure? It s time for an experiment! r=0,56 C=3,54 A=1m 2 47

46 List of contributors Staff Roland Geraerts Marjan van den Akker Han Hoogeveen Frank van der Stappen Mark Overmars Marc van Kreveld PhD students Arthur van Goethem Norman Jaklin Ioannis Karamouzas Wouter van Toll Arne Hillebrand MSc students Angelos Kremyzas Mihai Polak Jordi Vermeulen Martijn Koenis Marijn van der Zwan Scientific programmers Angelos Kremyzas Mihai Polak Wouter van Toll Companies Movares, GreenDino InControl, Evaqaid, 48


47 Contact We welcome people to collaborate and participate! Roland Geraerts uu.nl/staff/rjgeraerts ucrowds.com 49
CROWD SIMULATION AS A SERVICE
 CROWD SIMULATION AS A SERVICE Client dr. Roland Geraerts (r.j.geraerts@uu.nl) Virtual Worlds Dept. of Information and computing sciences Utrecht University (version 13 12 2017) Screenshot of a crowd simulation
CROWD SIMULATION AS A SERVICE Client dr. Roland Geraerts (r.j.geraerts@uu.nl) Virtual Worlds Dept. of Information and computing sciences Utrecht University (version 13 12 2017) Screenshot of a crowd simulation
A comparative study of k-nearest neighbour techniques in crowd simulation
 A comparative study of k-nearest neighbour techniques in crowd simulation Jordi Vermeulen Arne Hillebrand Roland Geraerts Department of Information and Computing Sciences Utrecht University, The Netherlands
A comparative study of k-nearest neighbour techniques in crowd simulation Jordi Vermeulen Arne Hillebrand Roland Geraerts Department of Information and Computing Sciences Utrecht University, The Netherlands
GPGPU-Accelerated Construction of High-Resolution Generalized Voronoi Diagrams and Navigation Meshes
 GPGPU-Accelerated Construction of High-Resolution Generalized Voronoi Diagrams and Navigation Meshes Rudi Bonfiglioli Textkernel Wouter van Toll Utrecht University Roland Geraerts Utrecht University (a)
GPGPU-Accelerated Construction of High-Resolution Generalized Voronoi Diagrams and Navigation Meshes Rudi Bonfiglioli Textkernel Wouter van Toll Utrecht University Roland Geraerts Utrecht University (a)
Navigation for Characters and Crowds in Complex Virtual Environments. Wouter van Toll
 Navigation for Characters and Crowds in Complex Virtual Environments Wouter van Toll 2017 Wouter van Toll Cover design by Wouter van Toll This work is licensed under a Creative Commons Attribution 4.0
Navigation for Characters and Crowds in Complex Virtual Environments Wouter van Toll 2017 Wouter van Toll Cover design by Wouter van Toll This work is licensed under a Creative Commons Attribution 4.0
High-density Crowds. A masters student s journey to graphics and multi agent systems
 High-density Crowds A masters student s journey to graphics and multi agent systems Who am I and why am I here? Jack Shabo, student of CDATE, year 2012 Doing a degree project in Crowd Simulations with
High-density Crowds A masters student s journey to graphics and multi agent systems Who am I and why am I here? Jack Shabo, student of CDATE, year 2012 Doing a degree project in Crowd Simulations with
Beyond A*: Speeding up pathfinding through hierarchical abstraction. Daniel Harabor NICTA & The Australian National University
 Beyond A*: Speeding up pathfinding through hierarchical abstraction Daniel Harabor NICTA & The Australian National University Motivation Myth: Pathfinding is a solved problem. Motivation Myth: Pathfinding
Beyond A*: Speeding up pathfinding through hierarchical abstraction Daniel Harabor NICTA & The Australian National University Motivation Myth: Pathfinding is a solved problem. Motivation Myth: Pathfinding
Collision Avoidance with Unity3d
 Collision Avoidance with Unity3d Jassiem Ifill September 12, 2013 Abstract The primary goal of the research presented in this paper is to achieve natural crowd simulation and collision avoidance within
Collision Avoidance with Unity3d Jassiem Ifill September 12, 2013 Abstract The primary goal of the research presented in this paper is to achieve natural crowd simulation and collision avoidance within
Space-time Group Motion Planning
 Space-time Group Motion Planning Ioannis Karamouzas, Roland Geraerts, A. Frank van der Stappen Abstract We present a novel approach for planning and directing heterogeneous groups of virtual agents based
Space-time Group Motion Planning Ioannis Karamouzas, Roland Geraerts, A. Frank van der Stappen Abstract We present a novel approach for planning and directing heterogeneous groups of virtual agents based
How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park
 How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park http://www.cs.umd.edu/~sorelle Outline Introduction Algorithms Computational Geometry Art Museum Problem
How Do Computers Solve Geometric Problems? Sorelle Friedler, University of Maryland - College Park http://www.cs.umd.edu/~sorelle Outline Introduction Algorithms Computational Geometry Art Museum Problem
On the Topology of Walkable Environments
 On the Topology of Walkable Environments Benjamin Burton 1, Arne Hillebrand 2, Maarten Löffler 2, Schleimer, Saul 3, Dylan Thurston 4, Stephan Tillmann 5, and Wouter van Toll 2 1 University of Queensland,
On the Topology of Walkable Environments Benjamin Burton 1, Arne Hillebrand 2, Maarten Löffler 2, Schleimer, Saul 3, Dylan Thurston 4, Stephan Tillmann 5, and Wouter van Toll 2 1 University of Queensland,
Performing Multicut on Walkable Environments
 Performing Multicut on Walkable Environments Obtaining a Minimally Connected Multi-Layered Environment from a Walkable Environment Arne Hillebrand, Marjan van den Akker, Roland Geraerts, and Han Hoogeveen
Performing Multicut on Walkable Environments Obtaining a Minimally Connected Multi-Layered Environment from a Walkable Environment Arne Hillebrand, Marjan van den Akker, Roland Geraerts, and Han Hoogeveen
Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation
 Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill lin@cs.unc.edu Joint work
Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill lin@cs.unc.edu Joint work
Navigation Queries from Triangular Meshes
 In Proceedings of the Third International Conference on Motion in Games (MIG), 2010 Navigation Queries from Triangular Meshes Marcelo Kallmann University of California, Merced Abstract. Navigation meshes
In Proceedings of the Third International Conference on Motion in Games (MIG), 2010 Navigation Queries from Triangular Meshes Marcelo Kallmann University of California, Merced Abstract. Navigation meshes
Geometric Computation: Introduction
 : Introduction Piotr Indyk Welcome to 6.838! Overview and goals Course Information Syllabus 2D Convex hull Signup sheet Geometric computation occurs everywhere: Geographic Information Systems (GIS): nearest
: Introduction Piotr Indyk Welcome to 6.838! Overview and goals Course Information Syllabus 2D Convex hull Signup sheet Geometric computation occurs everywhere: Geographic Information Systems (GIS): nearest
CS 231. Crowd Simulation. Outline. Introduction to Crowd Simulation. Flocking Social Forces 2D Cellular Automaton Continuum Crowds
 CS 231 Crowd Simulation Outline Introduction to Crowd Simulation Fields of Study & Applications Visualization vs. Realism Microscopic vs. Macroscopic Flocking Social Forces 2D Cellular Automaton Continuum
CS 231 Crowd Simulation Outline Introduction to Crowd Simulation Fields of Study & Applications Visualization vs. Realism Microscopic vs. Macroscopic Flocking Social Forces 2D Cellular Automaton Continuum
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Behavioral Animation in Crowd Simulation. Ying Wei
 Behavioral Animation in Crowd Simulation Ying Wei Goal Realistic movement: Emergence of crowd behaviors consistent with real-observed crowds Collision avoidance and response Perception, navigation, learning,
Behavioral Animation in Crowd Simulation Ying Wei Goal Realistic movement: Emergence of crowd behaviors consistent with real-observed crowds Collision avoidance and response Perception, navigation, learning,
Scalable Multi Agent Simulation on the GPU. Avi Bleiweiss NVIDIA Corporation San Jose, 2009
 Scalable Multi Agent Simulation on the GPU Avi Bleiweiss NVIDIA Corporation San Jose, 2009 Reasoning Explicit State machine, serial Implicit Compute intensive Fits SIMT well Collision avoidance Motivation
Scalable Multi Agent Simulation on the GPU Avi Bleiweiss NVIDIA Corporation San Jose, 2009 Reasoning Explicit State machine, serial Implicit Compute intensive Fits SIMT well Collision avoidance Motivation
Indicative Routes for Path Planning and Crowd Simulation
 Indicative Routes for Path Planning and Crowd Simulation Ioannis Karamouzas Roland Geraerts Mark Overmars Department of Information and Computing Sciences, Utrecht University Padualaan 14, De Uithof, 3584CH
Indicative Routes for Path Planning and Crowd Simulation Ioannis Karamouzas Roland Geraerts Mark Overmars Department of Information and Computing Sciences, Utrecht University Padualaan 14, De Uithof, 3584CH
The Corridor Map Method: Real-Time High-Quality Path Planning
 27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 WeC11.3 The Corridor Map Method: Real-Time High-Quality Path Planning Roland Geraerts and Mark H. Overmars Abstract
27 IEEE International Conference on Robotics and Automation Roma, Italy, 1-14 April 27 WeC11.3 The Corridor Map Method: Real-Time High-Quality Path Planning Roland Geraerts and Mark H. Overmars Abstract
A Predictive Collision Avoidance Model for Pedestrian Simulation
 A Predictive Collision Avoidance Model for Pedestrian Simulation Ioannis Karamouzas, Peter Heil, Pascal van Beek, and Mark H. Overmars Center for Advanced Gaming and Simulation, Utrecht University, The
A Predictive Collision Avoidance Model for Pedestrian Simulation Ioannis Karamouzas, Peter Heil, Pascal van Beek, and Mark H. Overmars Center for Advanced Gaming and Simulation, Utrecht University, The
Announcements. Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6
 Covers material from Feb. 11 through March 6") Multi-Robot Path Planning and Multi-Robot Traffic Management March 6, 2003 Class Meeting 16 Announcements Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6 Up to Now Swarm-Type
Multi-Robot Path Planning and Multi-Robot Traffic Management March 6, 2003 Class Meeting 16 Announcements Exam #2 next Thursday (March 13) Covers material from Feb. 11 through March 6 Up to Now Swarm-Type
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Adding Virtual Characters to the Virtual Worlds. Yiorgos Chrysanthou Department of Computer Science University of Cyprus
 Adding Virtual Characters to the Virtual Worlds Yiorgos Chrysanthou Department of Computer Science University of Cyprus Cities need people However realistic the model is, without people it does not have
Adding Virtual Characters to the Virtual Worlds Yiorgos Chrysanthou Department of Computer Science University of Cyprus Cities need people However realistic the model is, without people it does not have
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Pathfinding. Pathfinding Planned Movement
 345 Ludic Computing Lecture 10 Pathfinding Simon Colton & Alison Pease Computational Creativity Group Department of Computing Imperial College London www.doc.ic.ac.uk/ccg 1 Pathfinding Planned Movement
345 Ludic Computing Lecture 10 Pathfinding Simon Colton & Alison Pease Computational Creativity Group Department of Computing Imperial College London www.doc.ic.ac.uk/ccg 1 Pathfinding Planned Movement
I may not have gone where I intended to go, but I think I have ended up where I needed to be. Douglas Adams
 Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Disclaimer: I use these notes as a guide rather than a comprehensive coverage of the topic. They are neither a substitute for attending the lectures nor for reading the assigned material. I may not have
Scene Management. Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development
 Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development Chap. 5 Scene Management Overview Scene Management vs Rendering This chapter is about rendering
Video Game Technologies 11498: MSc in Computer Science and Engineering 11156: MSc in Game Design and Development Chap. 5 Scene Management Overview Scene Management vs Rendering This chapter is about rendering
Sensitivity Analysis of Evacuation Simulations
 Sensitivity Analysis of Evacuation Simulations 07. November 2014, WOST Contents Introduction Project Motivation and Background Basics of Evacuation Simulation Pathfinder simulation Input and Output Parameters
Sensitivity Analysis of Evacuation Simulations 07. November 2014, WOST Contents Introduction Project Motivation and Background Basics of Evacuation Simulation Pathfinder simulation Input and Output Parameters
Robot Motion Planning Using Generalised Voronoi Diagrams
 Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Robot Motion Planning Using Generalised Voronoi Diagrams MILOŠ ŠEDA, VÁCLAV PICH Institute of Automation and Computer Science Brno University of Technology Technická 2, 616 69 Brno CZECH REPUBLIC Abstract:
Implementing a Hybrid Space Discretisation Within An Agent Based Evacuation Model
 Paper presented at PED 2010, NIST, Maryland USA, March 8-10 2010 Implementing a Hybrid Space Discretisation Within An Agent Based Evacuation Model N. Chooramun, P.J. Lawrence and E.R.Galea Fire Safety
Paper presented at PED 2010, NIST, Maryland USA, March 8-10 2010 Implementing a Hybrid Space Discretisation Within An Agent Based Evacuation Model N. Chooramun, P.J. Lawrence and E.R.Galea Fire Safety
High level NavMesh Building Components
 High level NavMesh Building Components Here we introduce four high level components for the navigation system: NavMeshSurface for building and enabling a navmesh surface for one agent type. NavMeshModifier
High level NavMesh Building Components Here we introduce four high level components for the navigation system: NavMeshSurface for building and enabling a navmesh surface for one agent type. NavMeshModifier
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
Collaborators. Multiple Agents & Crowd Simulation: training sytems 5/15/2010. Interactive Multi-Robot Planning and Multi-Agent Simulation
 Interactive Multi-Robot Planning and Multi-Agent Simulation Dinesh Manocha UNC Chapel Hill dm@cs.unc.edu http://gamma.cs.unc.edu Collaborators Ming C. Lin Jur van der Berg Sean Curtis Russell Gayle Stephen
Interactive Multi-Robot Planning and Multi-Agent Simulation Dinesh Manocha UNC Chapel Hill dm@cs.unc.edu http://gamma.cs.unc.edu Collaborators Ming C. Lin Jur van der Berg Sean Curtis Russell Gayle Stephen
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Multi-Level Formation Roadmaps for Collision-Free Dynamic Shape Changes with Non-holonomic Teams
 Multi-Level Formation Roadmaps for Collision-Free Dynamic Shape Changes with Non-holonomic Teams Athanasios Krontiris Sushil Louis Kostas E. Bekris Abstract Teams of robots can utilize formations to accomplish
Multi-Level Formation Roadmaps for Collision-Free Dynamic Shape Changes with Non-holonomic Teams Athanasios Krontiris Sushil Louis Kostas E. Bekris Abstract Teams of robots can utilize formations to accomplish
CHAPTER SIX. the RRM creates small covering roadmaps for all tested environments.
 CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
CHAPTER SIX CREATING SMALL ROADMAPS Many algorithms have been proposed that create a roadmap from which a path for a moving object can be extracted. These algorithms generally do not give guarantees on
Tutorial: Using the UUCS Crowd Simulation Plug-in for Unity
 Tutorial: Using the UUCS Crowd Simulation Plug-in for Unity Introduction Version 1.1 - November 15, 2017 Authors: Dionysi Alexandridis, Simon Dirks, Wouter van Toll In this assignment, you will use the
Tutorial: Using the UUCS Crowd Simulation Plug-in for Unity Introduction Version 1.1 - November 15, 2017 Authors: Dionysi Alexandridis, Simon Dirks, Wouter van Toll In this assignment, you will use the
Automatic Construction of High Quality Roadmaps for Path Planning
 Automatic Construction of High Quality Roadmaps for Path Planning D.Nieuwenhuisen A.Kamphuis M.Mooijekind M.H.Overmars institute of information and computing sciences, utrecht university technical report
Automatic Construction of High Quality Roadmaps for Path Planning D.Nieuwenhuisen A.Kamphuis M.Mooijekind M.H.Overmars institute of information and computing sciences, utrecht university technical report
From geometry to spatial reasoning : automatic structuring of 3D virtual environments
 From geometry to spatial reasoning : automatic structuring of 3D virtual environments Carl-Johan Jorgensen, Fabrice Lamarche Université de Rennes 1 IRISA, UMR CNRS 6074 Université Européenne de Bretagne
From geometry to spatial reasoning : automatic structuring of 3D virtual environments Carl-Johan Jorgensen, Fabrice Lamarche Université de Rennes 1 IRISA, UMR CNRS 6074 Université Européenne de Bretagne
Geometric Computation: Introduction. Piotr Indyk
 Geometric Computation: Introduction Piotr Indyk Welcome to 6.850! Overview and goals Course Information Closest pair Signup sheet Geometric Computation Geometric computation occurs everywhere: Robotics:
Geometric Computation: Introduction Piotr Indyk Welcome to 6.850! Overview and goals Course Information Closest pair Signup sheet Geometric Computation Geometric computation occurs everywhere: Robotics:
CPSC 695. Methods for interpolation and analysis of continuing surfaces in GIS Dr. M. Gavrilova
 CPSC 695 Methods for interpolation and analysis of continuing surfaces in GIS Dr. M. Gavrilova Overview Data sampling for continuous surfaces Interpolation methods Global interpolation Local interpolation
CPSC 695 Methods for interpolation and analysis of continuing surfaces in GIS Dr. M. Gavrilova Overview Data sampling for continuous surfaces Interpolation methods Global interpolation Local interpolation
Toward realistic and efficient virtual crowds. Julien Pettré - June 25, 2015 Habilitation à Diriger des Recherches
 Toward realistic and efficient virtual crowds Julien Pettré - June 25, 2015 Habilitation à Diriger des Recherches A short Curriculum 2 2003 PhD degree from the University of Toulouse III Locomotion planning
Toward realistic and efficient virtual crowds Julien Pettré - June 25, 2015 Habilitation à Diriger des Recherches A short Curriculum 2 2003 PhD degree from the University of Toulouse III Locomotion planning
Shorter, Smaller, Tighter Old and New Challenges
 How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
How can Computational Geometry help Robotics and Automation: Shorter, Smaller, Tighter Old and New Challenges Dan Halperin School of Computer Science Tel Aviv University Algorithms in the Field/CG, CG
11 Behavioural Animation. Chapter 11. Behavioural Animation. Department of Computer Science and Engineering 11-1
 Chapter 11 Behavioural Animation 11-1 Behavioral Animation Knowing the environment Aggregate behavior Primitive behavior Intelligent behavior Crowd management 11-2 Behavioral Animation 11-3 Knowing the
Chapter 11 Behavioural Animation 11-1 Behavioral Animation Knowing the environment Aggregate behavior Primitive behavior Intelligent behavior Crowd management 11-2 Behavioral Animation 11-3 Knowing the
Real-time Simulation and Rendering of Large-scale Crowd Motion
 Real-time Simulation and Rendering of Large-scale Crowd Motion A thesis submitted in partial fulfilment of the requirements for the Degree of Master of Science in Department of Computer Science by Bo Li
Real-time Simulation and Rendering of Large-scale Crowd Motion A thesis submitted in partial fulfilment of the requirements for the Degree of Master of Science in Department of Computer Science by Bo Li
CS 378: Computer Game Technology
 CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
Multi Agent Navigation on GPU. Avi Bleiweiss
 Multi Agent Navigation on GPU Avi Bleiweiss Reasoning Explicit Implicit Script, storytelling State machine, serial Compute intensive Fits SIMT architecture well Navigation planning Collision avoidance
Multi Agent Navigation on GPU Avi Bleiweiss Reasoning Explicit Implicit Script, storytelling State machine, serial Compute intensive Fits SIMT architecture well Navigation planning Collision avoidance
Strategies for simulating pedestrian navigation with multiple reinforcement learning agents
 Strategies for simulating pedestrian navigation with multiple reinforcement learning agents Francisco Martinez-Gil, Miguel Lozano, Fernando Ferna ndez Presented by: Daniel Geschwender 9/29/2016 1 Overview
Strategies for simulating pedestrian navigation with multiple reinforcement learning agents Francisco Martinez-Gil, Miguel Lozano, Fernando Ferna ndez Presented by: Daniel Geschwender 9/29/2016 1 Overview
Universiteit Leiden Computer Science
 Universiteit Leiden Computer Science Optimizing octree updates for visibility determination on dynamic scenes Name: Hans Wortel Student-no: 0607940 Date: 28/07/2011 1st supervisor: Dr. Michael Lew 2nd
Universiteit Leiden Computer Science Optimizing octree updates for visibility determination on dynamic scenes Name: Hans Wortel Student-no: 0607940 Date: 28/07/2011 1st supervisor: Dr. Michael Lew 2nd
INTRODUCTION. Contact us for more detailed information or a demonstration of Pedestrian Dynamics.
 PEDESTRIAN DYNAMICS Pedestrian Dynamics crowd simulation software is the ultimate tool to model, analyze, optimize and visualize pedestrian crowds in any infrastructure. APPLICATION AREAS Pedestrian Dynamics
PEDESTRIAN DYNAMICS Pedestrian Dynamics crowd simulation software is the ultimate tool to model, analyze, optimize and visualize pedestrian crowds in any infrastructure. APPLICATION AREAS Pedestrian Dynamics
Sampling-based Planning 2
 RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
RBE MOTION PLANNING Sampling-based Planning 2 Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Problem with KD-tree RBE MOTION PLANNING Curse of dimension
How do people queue? A study of different queuing models. TGF 2015 Delft, 28th October 2015
 How do people queue? A study of different queuing models TGF 2015 Delft, 28th October 2015 Motivation Whenever there are crowded spaces, queuing occurs Such queuing evolves in many different ways, depending
How do people queue? A study of different queuing models TGF 2015 Delft, 28th October 2015 Motivation Whenever there are crowded spaces, queuing occurs Such queuing evolves in many different ways, depending
Real-time Crowd Movement On Large Scale Terrains
 Real-time Crowd Movement On Large Scale Terrains Wen Tang, Tao Ruan Wan* and Sanket Patel School of Computing and Mathematics, University of Teesside, Middlesbrough, United Kingdom E-mail: w.tang@tees.ac.uk
Real-time Crowd Movement On Large Scale Terrains Wen Tang, Tao Ruan Wan* and Sanket Patel School of Computing and Mathematics, University of Teesside, Middlesbrough, United Kingdom E-mail: w.tang@tees.ac.uk
Simulation of Agent Movement with a Path Finding Feature Based on Modification of Physical Force Approach
 Simulation of Agent Movement with a Path Finding Feature Based on Modification of Physical Force Approach NURULAQILLA KHAMIS Malaysia-Japan International Institute of Technology, Universiti Teknologi Malaysia,
Simulation of Agent Movement with a Path Finding Feature Based on Modification of Physical Force Approach NURULAQILLA KHAMIS Malaysia-Japan International Institute of Technology, Universiti Teknologi Malaysia,
Finding Shortest Path on Land Surface
 Finding Shortest Path on Land Surface Lian Liu, Raymond Chi-Wing Wong Hong Kong University of Science and Technology June 14th, 211 Introduction Land Surface Land surfaces are modeled as terrains A terrain
Finding Shortest Path on Land Surface Lian Liu, Raymond Chi-Wing Wong Hong Kong University of Science and Technology June 14th, 211 Introduction Land Surface Land surfaces are modeled as terrains A terrain
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Motion Planning for Human Crowds: from Individuals to Groups of Virtual Characters
 Motion Planning for Human Crowds: from Individuals to Groups of Virtual Characters Cover design by Ioannis Karamouzas ISBN/EAN: 978-90-393-5786-6 Copyright 2012 by Ioannis Karamouzas. All rights reserved.
Motion Planning for Human Crowds: from Individuals to Groups of Virtual Characters Cover design by Ioannis Karamouzas ISBN/EAN: 978-90-393-5786-6 Copyright 2012 by Ioannis Karamouzas. All rights reserved.
(Master Course) Mohammad Farshi Department of Computer Science, Yazd University. Yazd Univ. Computational Geometry.
 Mohammad Farshi Department of Computer Science, Yazd University. Yazd Univ. Computational Geometry.") 1 / 17 (Master Course) Mohammad Farshi Department of Computer Science, Yazd University 1392-1 2 / 17 : Mark de Berg, Otfried Cheong, Marc van Kreveld, Mark Overmars, Algorithms and Applications, 3rd Edition,
1 / 17 (Master Course) Mohammad Farshi Department of Computer Science, Yazd University 1392-1 2 / 17 : Mark de Berg, Otfried Cheong, Marc van Kreveld, Mark Overmars, Algorithms and Applications, 3rd Edition,
Subdivision Of Triangular Terrain Mesh Breckon, Chenney, Hobbs, Hoppe, Watts
 Subdivision Of Triangular Terrain Mesh Breckon, Chenney, Hobbs, Hoppe, Watts MSc Computer Games and Entertainment Maths & Graphics II 2013 Lecturer(s): FFL (with Gareth Edwards) Fractal Terrain Based on
Subdivision Of Triangular Terrain Mesh Breckon, Chenney, Hobbs, Hoppe, Watts MSc Computer Games and Entertainment Maths & Graphics II 2013 Lecturer(s): FFL (with Gareth Edwards) Fractal Terrain Based on
Crowd simulation. Taku Komura
 Crowd simulation Taku Komura Animating Crowds We have been going through methods to simulate individual characters What if we want to simulate the movement of crowds? Pedestrians in the streets Flock of
Crowd simulation Taku Komura Animating Crowds We have been going through methods to simulate individual characters What if we want to simulate the movement of crowds? Pedestrians in the streets Flock of
CMSC 425: Lecture 9 Geometric Data Structures for Games: Geometric Graphs Thursday, Feb 21, 2013
 CMSC 425: Lecture 9 Geometric Data Structures for Games: Geometric Graphs Thursday, Feb 21, 2013 Reading: Today s materials is presented in part in Computational Geometry: Algorithms and Applications (3rd
CMSC 425: Lecture 9 Geometric Data Structures for Games: Geometric Graphs Thursday, Feb 21, 2013 Reading: Today s materials is presented in part in Computational Geometry: Algorithms and Applications (3rd
Advanced path planning. ROS RoboCup Rescue Summer School 2012
 Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making,
Advanced path planning ROS RoboCup Rescue Summer School 2012 Simon Lacroix Toulouse, France Where do I come from? Robotics at LAAS/CNRS, Toulouse, France Research topics Perception, planning and decision-making,
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
Social Value Creation via IoT
 Social Value Creation via IoT Smart City, Enterprise and Service Solutions Kurt Jacobs kurt.jacobs@necect.com NEC Enterprise Communication Technologies 3 June 2016 The Earth in 2050 (Source:OECD, FAO,
Social Value Creation via IoT Smart City, Enterprise and Service Solutions Kurt Jacobs kurt.jacobs@necect.com NEC Enterprise Communication Technologies 3 June 2016 The Earth in 2050 (Source:OECD, FAO,
Path Planning in Repetitive Environments
 MMAR 2006 12th IEEE International Conference on Methods and Models in Automation and Robotics 28-31 August 2006 Międzyzdroje, Poland Path Planning in Repetitive Environments Jur van den Berg Mark Overmars
MMAR 2006 12th IEEE International Conference on Methods and Models in Automation and Robotics 28-31 August 2006 Międzyzdroje, Poland Path Planning in Repetitive Environments Jur van den Berg Mark Overmars
INTRODUCTION. Contact us for more detailed information or a demonstration of Pedestrian Dynamics.
 PEDESTRIAN DYNAMICS Pedestrian Dynamics crowd simulation software is the ultimate tool to model, analyze, optimize and visualize pedestrian crowds in any infrastructure. INTRODUCTION APPLICATION AREAS
PEDESTRIAN DYNAMICS Pedestrian Dynamics crowd simulation software is the ultimate tool to model, analyze, optimize and visualize pedestrian crowds in any infrastructure. INTRODUCTION APPLICATION AREAS
Generating sparse navigation graphs for microscopic pedestrian simulation models
 Generating sparse navigation graphs for microscopic pedestrian simulation models Angelika Kneidl 1, André Borrmann 1, Dirk Hartmann 2 1 Computational Modeling and Simulation Group, TU München, Germany
Generating sparse navigation graphs for microscopic pedestrian simulation models Angelika Kneidl 1, André Borrmann 1, Dirk Hartmann 2 1 Computational Modeling and Simulation Group, TU München, Germany
AUTONOMOUS TAWAF CROWD SIMULATION. Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari
 BORNEO SCIENCE 36 (2): SEPTEMBER 2015 AUTONOMOUS TAWAF CROWD SIMULATION Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari MaGIC-X (Media and Games Innonovation Centre of Excellence UTM-IRDA
BORNEO SCIENCE 36 (2): SEPTEMBER 2015 AUTONOMOUS TAWAF CROWD SIMULATION Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari MaGIC-X (Media and Games Innonovation Centre of Excellence UTM-IRDA
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Clearance Based Path Optimization for Motion Planning
 Clearance Based Path Optimization for Motion Planning Roland Geraerts Mark Overmars institute of information and computing sciences, utrecht university technical report UU-CS-2003-039 www.cs.uu.nl Clearance
Clearance Based Path Optimization for Motion Planning Roland Geraerts Mark Overmars institute of information and computing sciences, utrecht university technical report UU-CS-2003-039 www.cs.uu.nl Clearance
Real-time Collision Avoidance for Pedestrian and Bicyclist Simulation: a smooth and predictive approach
 Available online at www.sciencedirect.com Procedia Computer Science 19 (2013 ) 815 820 The 2nd International Workshop on Agent-based Mobility, Traffic and Transportation Models, Methodologies and Applications
Available online at www.sciencedirect.com Procedia Computer Science 19 (2013 ) 815 820 The 2nd International Workshop on Agent-based Mobility, Traffic and Transportation Models, Methodologies and Applications
Smallest Intersecting Circle for a Set of Polygons
 Smallest Intersecting Circle for a Set of Polygons Peter Otfried Joachim Christian Marc Esther René Michiel Antoine Alexander 31st August 2005 1 Introduction Motivated by automated label placement of groups
Smallest Intersecting Circle for a Set of Polygons Peter Otfried Joachim Christian Marc Esther René Michiel Antoine Alexander 31st August 2005 1 Introduction Motivated by automated label placement of groups
Lecture 1: September 6, 2001
 Lecture 1: September 6, 2001 Welcome to 6.838J, Geometric Computation! Introductions Overview and Goals General Information Syllabus 2D Convex Hull Signup sheets (return by end of class) MIT 6.838J/4.214J
Lecture 1: September 6, 2001 Welcome to 6.838J, Geometric Computation! Introductions Overview and Goals General Information Syllabus 2D Convex Hull Signup sheets (return by end of class) MIT 6.838J/4.214J
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Workspace Skeleton Tools for Motion Planning
 Workspace Skeleton Tools for Motion Planning Kiffany Lyons, Diego Ruvalcaba, Mukulika Ghosh, Shawna Thomas, and Nancy Amato Abstract Motion planning is the ability to find a valid path from a start to
Workspace Skeleton Tools for Motion Planning Kiffany Lyons, Diego Ruvalcaba, Mukulika Ghosh, Shawna Thomas, and Nancy Amato Abstract Motion planning is the ability to find a valid path from a start to
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go)
 Steering, Flocking, Formations (behavior involving how to go)") Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Indexing Land Surface for Efficient knn Query
 Indexing Land Surface for Efficient knn Query Cyrus Shahabi, Lu-An Tang and Songhua Xing InfoLab University of Southern California Los Angeles, CA 90089-0781 http://infolab.usc.edu Outline q Mo+va+on q
Indexing Land Surface for Efficient knn Query Cyrus Shahabi, Lu-An Tang and Songhua Xing InfoLab University of Southern California Los Angeles, CA 90089-0781 http://infolab.usc.edu Outline q Mo+va+on q
arxiv: v1 [cs.cg] 24 Jul 2018
![arxiv: v1 [cs.cg] 24 Jul 2018](/thumbs/83/88957563.jpg "arxiv: v1 [cs.cg] 24 Jul 2018") Does a robot path have clearance c? Ovidiu Daescu and Hemant Malik University of Texas at Dallas, Richardson TX 75080, USA {daescu, malik}@utdallas.edu arxiv:1807.09392v1 [cs.cg] 24 Jul 2018 Abstract.
Does a robot path have clearance c? Ovidiu Daescu and Hemant Malik University of Texas at Dallas, Richardson TX 75080, USA {daescu, malik}@utdallas.edu arxiv:1807.09392v1 [cs.cg] 24 Jul 2018 Abstract.
Geometric and Discrete Path Planning for Interactive Virtual Worlds
 In Proceedings of SIGGRAPH 2016 Course Notes, Anaheim, CA. This is the manuscript of the authors and not the final publication. Geometric and Discrete Path Planning for Interactive Virtual Worlds Marcelo
In Proceedings of SIGGRAPH 2016 Course Notes, Anaheim, CA. This is the manuscript of the authors and not the final publication. Geometric and Discrete Path Planning for Interactive Virtual Worlds Marcelo
Towards more Realistic and Efficient Virtual Environment Description and Usage
 Towards more Realistic and Efficient Virtual Environment Description and Usage Sébastien Paris, Stéphane Donikian, Nicolas Bonvalet IRISA, Campus de Beaulieu, 35042 Rennes cedex - FRANCE AREP, 163 bis,
Towards more Realistic and Efficient Virtual Environment Description and Usage Sébastien Paris, Stéphane Donikian, Nicolas Bonvalet IRISA, Campus de Beaulieu, 35042 Rennes cedex - FRANCE AREP, 163 bis,
Multi-unit pathfinding and column generation
 Multi-unit pathfinding and column generation Corien Prins August 13, 2010 University of Utrecht, department of Mathematics in cooperation with the department of Information and Computing Sciences. Supervisors
Multi-unit pathfinding and column generation Corien Prins August 13, 2010 University of Utrecht, department of Mathematics in cooperation with the department of Information and Computing Sciences. Supervisors
CS248. Game Mechanics
 CS248 Game Mechanics INTRODUCTION TOM WANG 2007 BS/MS CS KEY GAME MECHANICS * * * * * WORLD BUILDING CONTROLS CAMERA AI PERFORMANCE WORLD BUILDING WORLD BUILDING Set the atmosphere and tone of the game.
CS248 Game Mechanics INTRODUCTION TOM WANG 2007 BS/MS CS KEY GAME MECHANICS * * * * * WORLD BUILDING CONTROLS CAMERA AI PERFORMANCE WORLD BUILDING WORLD BUILDING Set the atmosphere and tone of the game.
MODELING AND HIERARCHY
 MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
MODELING AND HIERARCHY Introduction Models are abstractions of the world both of the real world in which we live and of virtual worlds that we create with computers. We are all familiar with mathematical
Luiz Fernando Martha André Pereira
 IRSES Project TUG - Graz, Austria June 2014 Numerical simulation in technical sciences Computer Graphics for Engineering Luiz Fernando Martha André Pereira Speakers A little bit about us Research Group
IRSES Project TUG - Graz, Austria June 2014 Numerical simulation in technical sciences Computer Graphics for Engineering Luiz Fernando Martha André Pereira Speakers A little bit about us Research Group
Computer Game Programming Basic Path Finding
 15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
15-466 Computer Game Programming Basic Path Finding Robotics Institute Path Planning Sven Path Planning needs to be very fast (especially for games with many characters) needs to generate believable paths
Blender Notes. Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 1 The Blender Interface and Basic Shapes
 Blender Notes Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 1 The Blender Interface and Basic Shapes Introduction Blender is a powerful modeling, animation and rendering
Blender Notes Introduction to Digital Modelling and Animation in Design Blender Tutorial - week 1 The Blender Interface and Basic Shapes Introduction Blender is a powerful modeling, animation and rendering
CrowdMixer: Multiple Agent Types in Situation-Based Crowd Simulations
 CrowdMixer: Multiple Agent Types in Situation-Based Crowd Simulations Shannon Blyth and Howard J. Hamilton Department of Computer Science University of Regina, Regina, SK, Canada S4S 0A2 {blyth1sh, hamilton}@cs.uregina.ca
CrowdMixer: Multiple Agent Types in Situation-Based Crowd Simulations Shannon Blyth and Howard J. Hamilton Department of Computer Science University of Regina, Regina, SK, Canada S4S 0A2 {blyth1sh, hamilton}@cs.uregina.ca
Last update: May 6, Robotics. CMSC 421: Chapter 25. CMSC 421: Chapter 25 1
 Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Computational Geometry. Free Lab Exercises. Year Q1
 Computational Geometry Free Lab Exercises Year 2016-17 Q1 Vera Sacristán Departament de Matemàtiques Facultat d Informàtica de Barcelona Universitat Politècnica de Catalunya Computational Geometry - Free
Computational Geometry Free Lab Exercises Year 2016-17 Q1 Vera Sacristán Departament de Matemàtiques Facultat d Informàtica de Barcelona Universitat Politècnica de Catalunya Computational Geometry - Free
PETS2009: Dataset and Challenge
 PETS2009: Dataset and Challenge J. Ferryman and A. Shahrokni Computational Vision Group School of Systems Engineering University of Reading Whiteknights, Reading, RG6 6AY, UK {j.m.ferryman a.shahrokni}@reading.ac.uk
PETS2009: Dataset and Challenge J. Ferryman and A. Shahrokni Computational Vision Group School of Systems Engineering University of Reading Whiteknights, Reading, RG6 6AY, UK {j.m.ferryman a.shahrokni}@reading.ac.uk
c 2012 Katrina R Gossman
 c 2012 Katrina R Gossman DESIGN OF ENVIRONMENTS TO CONTROL ROBOTIC BEHAVIOR BY KATRINA R GOSSMAN THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer
c 2012 Katrina R Gossman DESIGN OF ENVIRONMENTS TO CONTROL ROBOTIC BEHAVIOR BY KATRINA R GOSSMAN THESIS Submitted in partial fulfillment of the requirements for the degree of Master of Science in Computer
Multi-Agent Simulation of Circular Pedestrian Movements Using Cellular Automata
 Second Asia International Conference on Modelling & Simulation Multi-Agent Simulation of Circular Pedestrian Movements Using Cellular Automata Siamak Sarmady, Fazilah Haron and Abdullah Zawawi Hj. Talib
Second Asia International Conference on Modelling & Simulation Multi-Agent Simulation of Circular Pedestrian Movements Using Cellular Automata Siamak Sarmady, Fazilah Haron and Abdullah Zawawi Hj. Talib
Animating cuts with on-the-fly re-meshing
 EUROGRAPHICS 2001 / Jonathan C. Roberts Short Presentations Animating cuts with on-the-fly re-meshing F. Ganovelli and C. O Sullivan Image Synthesis Group, Computer Science Department, Trinity College
EUROGRAPHICS 2001 / Jonathan C. Roberts Short Presentations Animating cuts with on-the-fly re-meshing F. Ganovelli and C. O Sullivan Image Synthesis Group, Computer Science Department, Trinity College
video 1 video 2 Motion Planning (It s all in the discretization) Digital Actors Basic problem Basic problem Two Possible Discretizations
 Digital Actors Basic problem Basic problem Two Possible Discretizations") Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
arxiv: v1 [cs.cg] 7 Jun 2016
![arxiv: v1 [cs.cg] 7 Jun 2016](/thumbs/78/77852109.jpg "arxiv: v1 [cs.cg] 7 Jun 2016") From Constrained Delaunay Triangulations to Roadmap Graphs with Arbitrary Clearance Stéphane Lens and Bernard Boigelot Montefiore Institute, B28 University of Liège B-4000 Liège, Belgium {lens,boigelot}@montefiore.ulg.ac.be
From Constrained Delaunay Triangulations to Roadmap Graphs with Arbitrary Clearance Stéphane Lens and Bernard Boigelot Montefiore Institute, B28 University of Liège B-4000 Liège, Belgium {lens,boigelot}@montefiore.ulg.ac.be
Implementing Geometric Algorithms. Wouter van Toll June 20, 2017
 Implementing Geometric Algorithms Wouter van Toll June 20, 2017 Introduction 6/20/2017 Lecture: Implementing Geometric Algorithms 2 Focus of this course Create algorithms to solve geometric problems Prove
Implementing Geometric Algorithms Wouter van Toll June 20, 2017 Introduction 6/20/2017 Lecture: Implementing Geometric Algorithms 2 Focus of this course Create algorithms to solve geometric problems Prove
Prof. Gill Barequet. Center for Graphics and Geometric Computing, Technion. Dept. of Computer Science The Technion Haifa, Israel
 Computational Geometry (CS 236719) http://www.cs.tufts.edu/~barequet/teaching/cg Chapter 1 Introduction 1 Copyright 2002-2009 2009 Prof. Gill Barequet Center for Graphics and Geometric Computing Dept.
Computational Geometry (CS 236719) http://www.cs.tufts.edu/~barequet/teaching/cg Chapter 1 Introduction 1 Copyright 2002-2009 2009 Prof. Gill Barequet Center for Graphics and Geometric Computing Dept.