Behavioral Animation in Crowd Simulation. Ying Wei
|
|
|
- Jocelin Rose
- 6 years ago
- Views:
Transcription
1 Behavioral Animation in Crowd Simulation Ying Wei
2 Goal Realistic movement: Emergence of crowd behaviors consistent with real-observed crowds Collision avoidance and response Perception, navigation, learning, communicating, decision-making Full-body motion synthesis Adapt to dynamically changing virtual environment Real-time
3 Crowd Simulation methods: Social force model: [HFV00][HMFB01] Apply repulsion and tangential forces to simulate interactions Vibrate unnaturally in high-density crowds Rule-based agent model: [Rey87] Used with cognitive models for more realism Cellular automata model: [KS02] Fast and simple to implement Tend to expose the underlying checkerboard pattern with high density population Flowing continuum model: [Hug03][TCP06]
4 Group Behavior from Video: A Data-Driven Approach to Crowd Simulation Controlling Individual Agents in High- Density Crowd Simulation
5 Group Behavior from Video: A Data-Driven Approach to Crowd Simulation Kang Hoon Lee, Myung Geol Choi, Qyoun Hong and Jehee Lee Seoul National University
6 Overview A data-driven method simulating crowd behavior that imitates real crowds Capture crowd videos Semi-automated tracker and keyframebased interactive interface for 2D trajectory extraction Learn low-level action model from observed trajectories based on locally weighted linear regression [AMS97] Reproduce desired group behavior
7 Related Work Track multiple moving objects in videos [CRM03], [ZN04] [KBD05], [EBD*05]: MCMC-based tracker Reproducing observed movement patterns in a simulated environment [LCF05]: dynamically update group formations from a set of formation patterns [BJ03], [FWTK]: adapt steering models to walking data to improve path planning [Sti00],[Tek02]: microscopic pedestrian model
8 Video Capture and Processing Uncontrolled environment Controlled environment: 40 volunteers Pedestrians crossing and streaming through a variety of environment features; lining up; watching performance, wandering, chatting, standing idly, etc.
9 Pre-Processing Video Data Identify environment features Manually annotate environment features on a frame (assume only agents are moving dynamically) Track 2D trajectories of individuals Keyframe-based tracking interface: [AHSS04] Kernal-based tracking algorithm User specify initial and final location of each individual: bidirectional tracking and linearly blending Apply to refined time intervals if necessary Understanding high-level behaviors Manually annotate trajectories with high-level behaviors associated
10 State-Action pair Actions are decided based on limited perception The behavior model is learned from stateaction samples {(si, ai)} State s: environment feature, motion of nearby agents, own motion Action a: 2D vector (speed)
 Weighed empirically 21-D vector: PCA=>reparameterize to 8-12D")
11 State Vector Self speed: (curpos-prevpos)/time interval Neighborhood formation: Subdivide neighborhood into 8 radial regions Include the current and previous frame Pivot At most one pivot each behavior model Local coordinates Intended moving direction Average moving direction in a window of past and future frames (ten frames) Weighed empirically 21-D vector: PCA=>reparameterize to 8-12D for learning
12 Group Behavior Model Each low-level model is a primitive action Think of an action model as a function that takes the state of an agent as input and outputs a desired action at next frame High-level module controls transition between low-level action models
13 State-action trajectories divided into groups Each group is an action model Locally weighted linear regression method select a small set of samples similar to the query state (computation-demanding) Divide possible outputs into clusters(k-means clusters) Choose a cluster: mi: mean of i-th cluster mprev: mean of previous selected cluster K: number of clusters Pi: probability of selecting the i-th cluster
14 Locally Weighted Linear Regression Given samples regression model for x-coordinates of output vectors Similarly build the regression model for y- coordinate

15 If a state is significantly different from any samples in the training data Perturb the regression output Radial lines: possible outputs Radial windows: allowable perturbations Perturbation limited by a constant multiple of standard deviation from mean direction and distance Choose the perturbation that minimize the distance to the nearest sample
16 High-Level Behavior: Crowd Simulation High-level module controls transition between low-level action models Finite state machine: each action model corresponds to a state Encode transition and control parameters such as average duration of each action Example: repeated transition between locomotion and group interaction Measure average size of groups, average duration of staying, average interpersonal distance in groups User creates environment layout and annotates appropriate behavior model in each part of the environment
17 Full-body Motion Synthesis: mocap Locomotion:walk in various speeds and turning angles in-place:chat, stand idly, cheer, turn, reposition feet Synthesize motion along given trajectory Lookahead ( 0.66 sec)
18 Experiment Results An hour of video in a 10mx10m region About forty volunteers walked in a variety of environment setups about 30 min to postprocess 200 frames about 20 people each frame For each query, find 100 nearest samples and sort into three groups
19 Discussion Capability of reproducing realistic group behaviors in simulated environments Hard to accomplish by rule-based agent models Need quantitative evaluation of results beside visual comparison
20 Group Behavior from Video: A Data-Driven Approach to Crowd Simulation Controlling Individual Agents in High- Density Crowd Simulation
21 Controlling Individual Agents in High-Density Crowd Simulation N. Pelechano, J.M. Allbeck and N.I.Badler University of Pennysylvania, USA
22

23 HiDAC Architecture Overview Multi-agent system without centralized controller Agent behaviors are computed at two levels: Both levels are affected by psychological and physiological attributes High-level module determines attractor point.[pb06][pos05]
24 The HiDAC Model A parameterized social force model that depends on psychological and geometrical rules The movement of agent i depends on the desired attractor, while avoiding walls w, obstacles k and other agents j and trying to keep its previous direction of movement to avoid abrupt changes in its trajectory All these forces are summed together with different weights determined by psychological and/or geometrical rules The force vector is therefore:
25 The new desired position for agent I is :

26 Avoidance Force Rectangle of influence
27 Perception: cell and portal graph Cell: room Cell contains a list of static and dynamic objects Wall and Obstacle Avoidance:

28 Other Agent Avoidance Di = 3m for low density and 1.5m for high density
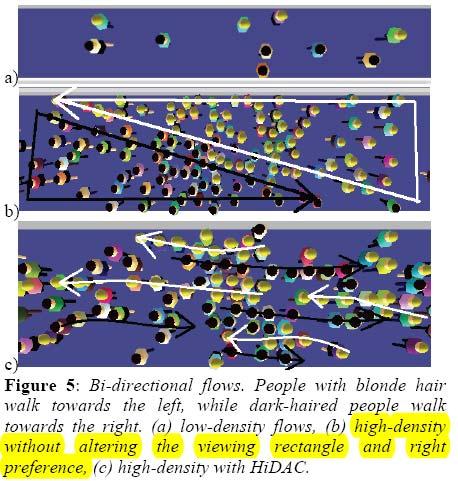
29
30 Repulsion Forces When overlapping occurs, a collision response force is applied.
31 Solution to shaking in High-Density stopping rules Personality Direction of other agent Current situation (panic/normal) Applies when repulsion forces from other agents is against desired direction and the situation is normal Set a timer to avoid deadlock When StoppingRule is true, is 0.
32

33 Organized behavior - queuing Influence disk Drive the temporal waiting behavior Work similar to stopping rules

34 Pushing Behavior Pushing behavior: a type of collision response. During an organized situation, individuals wait for space available before moving; but when in panic, they try to move until they collide with other individuals who impede forward progress. By combining both behaviors simultaneously for a heterogeneous crowd, we observe an emergent behavior where some individuals that do not respect personal space will get very close to other agents and push them away in order to open a path through a dense crowd. The effect of being pushed away is achieved by applying collision response forces and different personal space thresholds (εi, εj).
 can be stepped over.")
35 Falling and becoming Obstacles When the majority of pushing forces affecting one individual are approximately in the same direction, the agent will receive a sum of forces with magnitude high enough to make it lose equilibrium. Fallen agents represent a different type of obstacle: it is an obstacle that should be avoided, but if necessary (or unavoidable) can be stepped over. Fallen individuals => a rectangular obstacle When other agents approach this new obstacle, weak tangential forces are applied in order to walk around the fallen agent, but repulsive forces are not applied. Therefore, when the crowd is extremely dense and the pushing forces from behind are strong, the result is that agents may walk over the body on the floor.
36 Panic Propagation HiDAC can simulate an emergency evacuation. Agent personality and levels of panic. To propagate panic, we use either communication between agents (managed by the High-level behavior module), or perception to detect relevant changes in low-level behaviors, such as increasing crowd densities and number of people pushing or both.

 knowledge that the agent has about the internal connectivity of the")
37 Avoiding bottlenecks and interactive changes in the environment When dealing with high-density crowds in buildings, bottlenecks can appear in the portals. Find an alternative path: high-level module Base on its current position (doors, obstacles) knowledge that the agent has about the internal connectivity of the building.
38 Results 2.99 GHz Intel Xeon with 2GB of RAM measuring frame rates both for simulation only and for simulation and 3D rendering. When doing only simulation, HiDAC can handle up to 1800 agents with a frame rate of 25Hz. Simulation and 3D rendering using an NVIDIA Quadro FX 3400/4400 graphics system can achieve 25 frames/second (not using GPU rendering) for up to 600 simple 3D virtual human figures ( crayon figures ) each with about 100 vertices. For the frame rate tests, we used a large complex environment with 85 rooms and 53,448 vertices overall.
39 Conclusion Novel extensions to social forces models by adding stopping rules and influence region controls. Uses the best features of both rule-based and social forces systems, while eliminating their disadvantages. The implementation allows real-time simulations for hundreds of individualized agents. Future work: Map low level parameters to agent properties that are much more intuitive Add in agent actions other than locomotion.
Group Behavior from Video: A Data-Driven Approach to Crowd Simulation
 Eurographics/ ACM SIGGRAPH Symposium on Computer Animation (2007) D. Metaxas and J. Popovic (Editors) Group Behavior from Video: A Data-Driven Approach to Crowd Simulation Kang Hoon Lee, Myung Geol Choi,
Eurographics/ ACM SIGGRAPH Symposium on Computer Animation (2007) D. Metaxas and J. Popovic (Editors) Group Behavior from Video: A Data-Driven Approach to Crowd Simulation Kang Hoon Lee, Myung Geol Choi,
MODELING REALISTIC HIGH DENSITY AUTONOMOUS AGENT CROWD MOVEMENT: SOCIAL FORCES, COMMUNICATION, ROLES AND PSYCHOLOGICAL INFLUENCES A DISSERTATION
 MODELING REALISTIC HIGH DENSITY AUTONOMOUS AGENT CROWD MOVEMENT: SOCIAL FORCES, COMMUNICATION, ROLES AND PSYCHOLOGICAL INFLUENCES NURIA PELECHANO GOMEZ A DISSERTATION in Computer and Information Science
MODELING REALISTIC HIGH DENSITY AUTONOMOUS AGENT CROWD MOVEMENT: SOCIAL FORCES, COMMUNICATION, ROLES AND PSYCHOLOGICAL INFLUENCES NURIA PELECHANO GOMEZ A DISSERTATION in Computer and Information Science
CS 231. Crowd Simulation. Outline. Introduction to Crowd Simulation. Flocking Social Forces 2D Cellular Automaton Continuum Crowds
 CS 231 Crowd Simulation Outline Introduction to Crowd Simulation Fields of Study & Applications Visualization vs. Realism Microscopic vs. Macroscopic Flocking Social Forces 2D Cellular Automaton Continuum
CS 231 Crowd Simulation Outline Introduction to Crowd Simulation Fields of Study & Applications Visualization vs. Realism Microscopic vs. Macroscopic Flocking Social Forces 2D Cellular Automaton Continuum
Crowd simulation. Taku Komura
 Crowd simulation Taku Komura Animating Crowds We have been going through methods to simulate individual characters What if we want to simulate the movement of crowds? Pedestrians in the streets Flock of
Crowd simulation Taku Komura Animating Crowds We have been going through methods to simulate individual characters What if we want to simulate the movement of crowds? Pedestrians in the streets Flock of
Simulation of Agent Movement with a Path Finding Feature Based on Modification of Physical Force Approach
 Simulation of Agent Movement with a Path Finding Feature Based on Modification of Physical Force Approach NURULAQILLA KHAMIS Malaysia-Japan International Institute of Technology, Universiti Teknologi Malaysia,
Simulation of Agent Movement with a Path Finding Feature Based on Modification of Physical Force Approach NURULAQILLA KHAMIS Malaysia-Japan International Institute of Technology, Universiti Teknologi Malaysia,
AUTONOMOUS TAWAF CROWD SIMULATION. Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari
 BORNEO SCIENCE 36 (2): SEPTEMBER 2015 AUTONOMOUS TAWAF CROWD SIMULATION Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari MaGIC-X (Media and Games Innonovation Centre of Excellence UTM-IRDA
BORNEO SCIENCE 36 (2): SEPTEMBER 2015 AUTONOMOUS TAWAF CROWD SIMULATION Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari MaGIC-X (Media and Games Innonovation Centre of Excellence UTM-IRDA
Complex behavior emergent from simpler ones
 Reactive Paradigm: Basics Based on ethology Vertical decomposition, as opposed to horizontal decomposition of hierarchical model Primitive behaviors at bottom Higher behaviors at top Each layer has independent
Reactive Paradigm: Basics Based on ethology Vertical decomposition, as opposed to horizontal decomposition of hierarchical model Primitive behaviors at bottom Higher behaviors at top Each layer has independent
Strategies for simulating pedestrian navigation with multiple reinforcement learning agents
 Strategies for simulating pedestrian navigation with multiple reinforcement learning agents Francisco Martinez-Gil, Miguel Lozano, Fernando Ferna ndez Presented by: Daniel Geschwender 9/29/2016 1 Overview
Strategies for simulating pedestrian navigation with multiple reinforcement learning agents Francisco Martinez-Gil, Miguel Lozano, Fernando Ferna ndez Presented by: Daniel Geschwender 9/29/2016 1 Overview
Adding Virtual Characters to the Virtual Worlds. Yiorgos Chrysanthou Department of Computer Science University of Cyprus
 Adding Virtual Characters to the Virtual Worlds Yiorgos Chrysanthou Department of Computer Science University of Cyprus Cities need people However realistic the model is, without people it does not have
Adding Virtual Characters to the Virtual Worlds Yiorgos Chrysanthou Department of Computer Science University of Cyprus Cities need people However realistic the model is, without people it does not have
Multi-Agent Simulation of Circular Pedestrian Movements Using Cellular Automata
 Second Asia International Conference on Modelling & Simulation Multi-Agent Simulation of Circular Pedestrian Movements Using Cellular Automata Siamak Sarmady, Fazilah Haron and Abdullah Zawawi Hj. Talib
Second Asia International Conference on Modelling & Simulation Multi-Agent Simulation of Circular Pedestrian Movements Using Cellular Automata Siamak Sarmady, Fazilah Haron and Abdullah Zawawi Hj. Talib
Robot-Assisted Crowd Evacuation under Emergency Situations: A Survey
 robotics Article Robot-Assisted Crowd Evacuation under Emergency Situations: A Survey Ibraheem Sakour * and Huosheng Hu School of Computer and Electronic Engineering, University of Essex, Colchester CO4
robotics Article Robot-Assisted Crowd Evacuation under Emergency Situations: A Survey Ibraheem Sakour * and Huosheng Hu School of Computer and Electronic Engineering, University of Essex, Colchester CO4
Destination Flow for Crowd Simulation
 Destination Flow for Crowd Simulation Stefano Pellegrini 1,, Juergen Gall 2, Leonid Sigal 3, and Luc Van Gool 1 1 ETH Zurich, 2 MPI for Intelligent Systems, 3 Disney Research Pittsburgh Abstract. We present
Destination Flow for Crowd Simulation Stefano Pellegrini 1,, Juergen Gall 2, Leonid Sigal 3, and Luc Van Gool 1 1 ETH Zurich, 2 MPI for Intelligent Systems, 3 Disney Research Pittsburgh Abstract. We present
11 Behavioural Animation. Chapter 11. Behavioural Animation. Department of Computer Science and Engineering 11-1
 Chapter 11 Behavioural Animation 11-1 Behavioral Animation Knowing the environment Aggregate behavior Primitive behavior Intelligent behavior Crowd management 11-2 Behavioral Animation 11-3 Knowing the
Chapter 11 Behavioural Animation 11-1 Behavioral Animation Knowing the environment Aggregate behavior Primitive behavior Intelligent behavior Crowd management 11-2 Behavioral Animation 11-3 Knowing the
CS 378: Computer Game Technology
 CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
Collision Avoidance with Unity3d
 Collision Avoidance with Unity3d Jassiem Ifill September 12, 2013 Abstract The primary goal of the research presented in this paper is to achieve natural crowd simulation and collision avoidance within
Collision Avoidance with Unity3d Jassiem Ifill September 12, 2013 Abstract The primary goal of the research presented in this paper is to achieve natural crowd simulation and collision avoidance within
Motion Synthesis and Editing. Yisheng Chen
 Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Motion Synthesis and Editing Yisheng Chen Overview Data driven motion synthesis automatically generate motion from a motion capture database, offline or interactive User inputs Large, high-dimensional
Traffic/Flocking/Crowd AI. Gregory Miranda
 Traffic/Flocking/Crowd AI Gregory Miranda Introduction What is Flocking? Coordinated animal motion such as bird flocks and fish schools Initially described by Craig Reynolds Created boids in 1986, generic
Traffic/Flocking/Crowd AI Gregory Miranda Introduction What is Flocking? Coordinated animal motion such as bird flocks and fish schools Initially described by Craig Reynolds Created boids in 1986, generic
Motion Graphs for Character Animation
 Parag Chaudhuri Indian Institute of Technology Bombay Research Promotion Workshop on Introduction to Graph and Geometric Algorithms Thapar University Patiala October 30, 2010 Outline Introduction The Need
Parag Chaudhuri Indian Institute of Technology Bombay Research Promotion Workshop on Introduction to Graph and Geometric Algorithms Thapar University Patiala October 30, 2010 Outline Introduction The Need
A Responsiveness Metric for Controllable Characters Technical Report CS
 A Responsiveness Metric for Controllable Characters Technical Report CS05-50-0 Madhusudhanan Srinivasan Ronald A. Metoyer School of Electrical Engineering and Computer Science Oregon State University ρ
A Responsiveness Metric for Controllable Characters Technical Report CS05-50-0 Madhusudhanan Srinivasan Ronald A. Metoyer School of Electrical Engineering and Computer Science Oregon State University ρ
From Biological Cells to Populations of Individuals: Complex Systems Simulations with CUDA (S5133)
") From Biological Cells to Populations of Individuals: Complex Systems Simulations with CUDA (S5133) Dr Paul Richmond Research Fellow University of Sheffield (NVIDIA CUDA Research Centre) Overview Complex
From Biological Cells to Populations of Individuals: Complex Systems Simulations with CUDA (S5133) Dr Paul Richmond Research Fellow University of Sheffield (NVIDIA CUDA Research Centre) Overview Complex
A comparative study of k-nearest neighbour techniques in crowd simulation
 A comparative study of k-nearest neighbour techniques in crowd simulation Jordi Vermeulen Arne Hillebrand Roland Geraerts Department of Information and Computing Sciences Utrecht University, The Netherlands
A comparative study of k-nearest neighbour techniques in crowd simulation Jordi Vermeulen Arne Hillebrand Roland Geraerts Department of Information and Computing Sciences Utrecht University, The Netherlands
Particle Systems. Typical Time Step. Particle Generation. Controlling Groups of Objects: Particle Systems. Flocks and Schools
 Particle Systems Controlling Groups of Objects: Particle Systems Flocks and Schools A complex, fuzzy system represented by a large collection of individual elements. Each element has simple behavior and
Particle Systems Controlling Groups of Objects: Particle Systems Flocks and Schools A complex, fuzzy system represented by a large collection of individual elements. Each element has simple behavior and
Crowd simulation. Summerschool Utrecht: Multidisciplinary Game Research. Dr. Roland Geraerts 23 August 2017
 Crowd simulation Summerschool Utrecht: Multidisciplinary Game Research Dr. Roland Geraerts 23 August 2017 1 Societal relevance of crowd simulation The number of environments with big crowds are growing
Crowd simulation Summerschool Utrecht: Multidisciplinary Game Research Dr. Roland Geraerts 23 August 2017 1 Societal relevance of crowd simulation The number of environments with big crowds are growing
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go)
 Steering, Flocking, Formations (behavior involving how to go)") Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
A Framework for A Graph- and Queuing System-Based Pedestrian Simulation
 A Framework for A Graph- and Queuing System-Based Pedestrian Simulation Srihari Narasimhan IPVS Universität Stuttgart Stuttgart, Germany Hans-Joachim Bungartz Institut für Informatik Technische Universität
A Framework for A Graph- and Queuing System-Based Pedestrian Simulation Srihari Narasimhan IPVS Universität Stuttgart Stuttgart, Germany Hans-Joachim Bungartz Institut für Informatik Technische Universität
URBAN SCALE CROWD DATA ANALYSIS, SIMULATION, AND VISUALIZATION
 www.bsc.es URBAN SCALE CROWD DATA ANALYSIS, SIMULATION, AND VISUALIZATION Isaac Rudomin May 2017 ABSTRACT We'll dive deep into how we use heterogeneous clusters with GPUs for accelerating urban-scale crowd
www.bsc.es URBAN SCALE CROWD DATA ANALYSIS, SIMULATION, AND VISUALIZATION Isaac Rudomin May 2017 ABSTRACT We'll dive deep into how we use heterogeneous clusters with GPUs for accelerating urban-scale crowd
Context-Aware Motion Diversification for Crowd Simulation*
 Context-Aware Motion Diversification for Crowd Simulation* Qin Gu and Zhigang Deng Computer Science Department University of Houston Houston, TX, 77204, USA http://www.cs.uh.edu Technical Report Number
Context-Aware Motion Diversification for Crowd Simulation* Qin Gu and Zhigang Deng Computer Science Department University of Houston Houston, TX, 77204, USA http://www.cs.uh.edu Technical Report Number
Modeling pigeon behaviour using a Conditional Restricted Boltzmann Machine
 Modeling pigeon behaviour using a Conditional Restricted Boltzmann Machine Matthew D. Zeiler 1,GrahamW.Taylor 1, Nikolaus F. Troje 2 and Geoffrey E. Hinton 1 1- University of Toronto - Dept. of Computer
Modeling pigeon behaviour using a Conditional Restricted Boltzmann Machine Matthew D. Zeiler 1,GrahamW.Taylor 1, Nikolaus F. Troje 2 and Geoffrey E. Hinton 1 1- University of Toronto - Dept. of Computer
Simulation Modelling Practice and Theory
 Simulation Modelling Practice and Theory 19 (2011) 969 985 Contents lists available at ScienceDirect Simulation Modelling Practice and Theory journal homepage: www.elsevier.com/locate/simpat A cellular
Simulation Modelling Practice and Theory 19 (2011) 969 985 Contents lists available at ScienceDirect Simulation Modelling Practice and Theory journal homepage: www.elsevier.com/locate/simpat A cellular
Chapter 3 Implementing Simulations as Individual-Based Models
 24 Chapter 3 Implementing Simulations as Individual-Based Models In order to develop models of such individual behavior and social interaction to understand the complex of an urban environment, we need
24 Chapter 3 Implementing Simulations as Individual-Based Models In order to develop models of such individual behavior and social interaction to understand the complex of an urban environment, we need
MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC. Alexandre Meyer Master Informatique
 1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
1 MOTION CAPTURE DATA PROCESSING - MOTION EDITING / RETARGETING - MOTION CONTROL / GRAPH - INVERSE KINEMATIC Alexandre Meyer Master Informatique Overview: Motion data processing In this course Motion editing
Collision Avoidance for Preplanned Locomotion
 22 Collision Avoidance for Preplanned Locomotion Bobby Anguelov 22.1 Introduction 22.2 Collision Avoidance for Preplanned Locomotion 22.3 Collision Detection and Trivial Collision Resolution 22.4 Nontrivial
22 Collision Avoidance for Preplanned Locomotion Bobby Anguelov 22.1 Introduction 22.2 Collision Avoidance for Preplanned Locomotion 22.3 Collision Detection and Trivial Collision Resolution 22.4 Nontrivial
Watch Out! A Framework for Evaluating Steering Behaviors
 Watch Out! A Framework for Evaluating Steering Behaviors Shawn Singh, Mishali Naik, Mubbasir Kapadia, Petros Faloutsos, and Glenn Reinman University of California, Los Angeles Abstract. Interactive virtual
Watch Out! A Framework for Evaluating Steering Behaviors Shawn Singh, Mishali Naik, Mubbasir Kapadia, Petros Faloutsos, and Glenn Reinman University of California, Los Angeles Abstract. Interactive virtual
Clearance for diversity of agents sizes in Navigation Meshes
 Clearance for diversity of agents sizes in Navigation Meshes Ramon Oliva a,b, Nuria Pelechano a a Virvig, Universitat Politècnica de Catalunya b EventLab, Universitat de Barcelona Abstract There are two
Clearance for diversity of agents sizes in Navigation Meshes Ramon Oliva a,b, Nuria Pelechano a a Virvig, Universitat Politècnica de Catalunya b EventLab, Universitat de Barcelona Abstract There are two
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Research Article Parallel Motion Simulation of Large-Scale Real-Time Crowd in a Hierarchical Environmental Model
 Mathematical Problems in Engineering Volume 2012, Article ID 918497, 15 pages doi:10.1155/2012/918497 Research Article Parallel Motion Simulation of Large-Scale Real-Time Crowd in a Hierarchical Environmental
Mathematical Problems in Engineering Volume 2012, Article ID 918497, 15 pages doi:10.1155/2012/918497 Research Article Parallel Motion Simulation of Large-Scale Real-Time Crowd in a Hierarchical Environmental
Crowd simulation influenced by agent s sociopsychological
 HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/ Crowd simulation influenced by agent s sociopsychological state F. Cherif, and R. Chighoub 48 Abstract The aim our work is to create virtual humans as
HTTPS://SITES.GOOGLE.COM/SITE/JOURNALOFCOMPUTING/ Crowd simulation influenced by agent s sociopsychological state F. Cherif, and R. Chighoub 48 Abstract The aim our work is to create virtual humans as
LECTURE 16: SWARM INTELLIGENCE 2 / PARTICLE SWARM OPTIMIZATION 2
 15-382 COLLECTIVE INTELLIGENCE - S18 LECTURE 16: SWARM INTELLIGENCE 2 / PARTICLE SWARM OPTIMIZATION 2 INSTRUCTOR: GIANNI A. DI CARO BACKGROUND: REYNOLDS BOIDS Reynolds created a model of coordinated animal
15-382 COLLECTIVE INTELLIGENCE - S18 LECTURE 16: SWARM INTELLIGENCE 2 / PARTICLE SWARM OPTIMIZATION 2 INSTRUCTOR: GIANNI A. DI CARO BACKGROUND: REYNOLDS BOIDS Reynolds created a model of coordinated animal
Toward realistic and efficient virtual crowds. Julien Pettré - June 25, 2015 Habilitation à Diriger des Recherches
 Toward realistic and efficient virtual crowds Julien Pettré - June 25, 2015 Habilitation à Diriger des Recherches A short Curriculum 2 2003 PhD degree from the University of Toulouse III Locomotion planning
Toward realistic and efficient virtual crowds Julien Pettré - June 25, 2015 Habilitation à Diriger des Recherches A short Curriculum 2 2003 PhD degree from the University of Toulouse III Locomotion planning
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Video based Animation Synthesis with the Essential Graph. Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes
 Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Video based Animation Synthesis with the Essential Graph Adnane Boukhayma, Edmond Boyer MORPHEO INRIA Grenoble Rhône-Alpes Goal Given a set of 4D models, how to generate realistic motion from user specified
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Principles of Computer Game Design and Implementation. Revision Lecture
 Principles of Computer Game Design and Implementation Revision Lecture Introduction Brief history; game genres Game structure A series of interesting choices Series of convexities Variable difficulty increase
Principles of Computer Game Design and Implementation Revision Lecture Introduction Brief history; game genres Game structure A series of interesting choices Series of convexities Variable difficulty increase
Phase-Functioned Neural Networks for Motion Learning
 Phase-Functioned Neural Networks for Motion Learning TAMS University of Hamburg 03.01.2018 Sebastian Starke University of Edinburgh School of Informatics Institue of Perception, Action and Behaviour Sebastian.Starke@ed.ac.uk
Phase-Functioned Neural Networks for Motion Learning TAMS University of Hamburg 03.01.2018 Sebastian Starke University of Edinburgh School of Informatics Institue of Perception, Action and Behaviour Sebastian.Starke@ed.ac.uk
12 - More Steering. from Milligan, "Artificial Intelligence for Games", Morgan Kaufman, 2006
 12 - More Steering from Milligan, "Artificial Intelligence for Games", Morgan Kaufman, 2006 Separation commonly used in crowds, when all characters moving in roughly the same direction (repulsion steering)
12 - More Steering from Milligan, "Artificial Intelligence for Games", Morgan Kaufman, 2006 Separation commonly used in crowds, when all characters moving in roughly the same direction (repulsion steering)
Humanoid Robotics. Path Planning and Walking. Maren Bennewitz
 Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Humanoid Robotics Path Planning and Walking Maren Bennewitz 1 Introduction Given the robot s pose in a model of the environment Compute a path to a target location First: 2D path in a 2D grid map representation
Formations in flow fields
 Formations in flow fields Rick van Meer June 11, 2015 1 Introduction Pathfinding and formations (i.e. an arrangement of agents) are both a part of artificial intelligence and can be used in games. However,
Formations in flow fields Rick van Meer June 11, 2015 1 Introduction Pathfinding and formations (i.e. an arrangement of agents) are both a part of artificial intelligence and can be used in games. However,
Figure 2.1: High level diagram of system.
 Basile and Choudhury 6.111 Final Project: La PC-na Project Proposal 1 Introduction The luxury of purchasing separate pool tables, foosball tables, and air hockey tables is beyond the budget of many, particularly
Basile and Choudhury 6.111 Final Project: La PC-na Project Proposal 1 Introduction The luxury of purchasing separate pool tables, foosball tables, and air hockey tables is beyond the budget of many, particularly
Heterogenous Computing
 Heterogenous Computing Fall 2018 CS, SE - Freshman Seminar 11:00 a 11:50a Computer Architecture What are the components of a computer? How do these components work together to perform computations? How
Heterogenous Computing Fall 2018 CS, SE - Freshman Seminar 11:00 a 11:50a Computer Architecture What are the components of a computer? How do these components work together to perform computations? How
Full-Body Behavioral Path Planning in Cluttered Environments
 In Proceedings of the ACM SIGGRAPH Conference on Motion in Games (MIG), 2016. This is the manuscript of the authors. Full-Body Behavioral Path Planning in Cluttered Environments Alain Juarez-Perez University
In Proceedings of the ACM SIGGRAPH Conference on Motion in Games (MIG), 2016. This is the manuscript of the authors. Full-Body Behavioral Path Planning in Cluttered Environments Alain Juarez-Perez University
Implementing a Hybrid Space Discretisation Within An Agent Based Evacuation Model
 Paper presented at PED 2010, NIST, Maryland USA, March 8-10 2010 Implementing a Hybrid Space Discretisation Within An Agent Based Evacuation Model N. Chooramun, P.J. Lawrence and E.R.Galea Fire Safety
Paper presented at PED 2010, NIST, Maryland USA, March 8-10 2010 Implementing a Hybrid Space Discretisation Within An Agent Based Evacuation Model N. Chooramun, P.J. Lawrence and E.R.Galea Fire Safety
A Predictive Collision Avoidance Model for Pedestrian Simulation
 A Predictive Collision Avoidance Model for Pedestrian Simulation Ioannis Karamouzas, Peter Heil, Pascal van Beek, and Mark H. Overmars Center for Advanced Gaming and Simulation, Utrecht University, The
A Predictive Collision Avoidance Model for Pedestrian Simulation Ioannis Karamouzas, Peter Heil, Pascal van Beek, and Mark H. Overmars Center for Advanced Gaming and Simulation, Utrecht University, The
Exploiting Depth Camera for 3D Spatial Relationship Interpretation
 Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Exploiting Depth Camera for 3D Spatial Relationship Interpretation Jun Ye Kien A. Hua Data Systems Group, University of Central Florida Mar 1, 2013 Jun Ye and Kien A. Hua (UCF) 3D directional spatial relationships
Synthesis by Example. Connecting Motion Planning and Example based Movement. Michael Gleicher
 Synthesis by Example Connecting Motion Planning and Example based Movement Michael Gleicher Dept of Computer Sciences University of Wisconsin Madison Case Study 1 Part I. Michael Gleicher 1 What is Motion
Synthesis by Example Connecting Motion Planning and Example based Movement Michael Gleicher Dept of Computer Sciences University of Wisconsin Madison Case Study 1 Part I. Michael Gleicher 1 What is Motion
Ian Mitchell. Department of Computer Science The University of British Columbia
 CPSC 542D: Level Set Methods Dynamic Implicit Surfaces and the Hamilton-Jacobi Equation or What Water Simulation, Robot Path Planning and Aircraft Collision Avoidance Have in Common Ian Mitchell Department
CPSC 542D: Level Set Methods Dynamic Implicit Surfaces and the Hamilton-Jacobi Equation or What Water Simulation, Robot Path Planning and Aircraft Collision Avoidance Have in Common Ian Mitchell Department
Developing a massive real-time crowd simulation framework on the GPU
 Developing a massive real-time crowd simulation framework on the GPU October 13, 2016 Guillaume Payet gvp13@uclive.ac.nz Department of Computer Science and Software Engineering University of Canterbury,
Developing a massive real-time crowd simulation framework on the GPU October 13, 2016 Guillaume Payet gvp13@uclive.ac.nz Department of Computer Science and Software Engineering University of Canterbury,
Keywords affordance, egocentric, steering, space-time planning
 Keywords affordance, egocentric, steering, space-time planning Noname manuscript No. 2(will be inserted by the editor) M. Kapadia et al. Parallelized Egocentric Fields for Autonomous Navigation Mubbasir
Keywords affordance, egocentric, steering, space-time planning Noname manuscript No. 2(will be inserted by the editor) M. Kapadia et al. Parallelized Egocentric Fields for Autonomous Navigation Mubbasir
Real-time Simulation and Rendering of Large-scale Crowd Motion
 Real-time Simulation and Rendering of Large-scale Crowd Motion A thesis submitted in partial fulfilment of the requirements for the Degree of Master of Science in Department of Computer Science by Bo Li
Real-time Simulation and Rendering of Large-scale Crowd Motion A thesis submitted in partial fulfilment of the requirements for the Degree of Master of Science in Department of Computer Science by Bo Li
Multi Exit Configuration of Mesoscopic Pedestrian Simulation
 Multi Exit Configuration of Mesoscopic Pedestrian Simulation Allan Lao Lorma Colleges San Fernando City La Union alao@lorma.edu Kardi Teknomo Ateneo de Manila University Loyola Heights Quezon City teknomo@gmail.com
Multi Exit Configuration of Mesoscopic Pedestrian Simulation Allan Lao Lorma Colleges San Fernando City La Union alao@lorma.edu Kardi Teknomo Ateneo de Manila University Loyola Heights Quezon City teknomo@gmail.com
GPU-based Distributed Behavior Models with CUDA
 GPU-based Distributed Behavior Models with CUDA Courtesy: YouTube, ISIS Lab, Universita degli Studi di Salerno Bradly Alicea Introduction Flocking: Reynolds boids algorithm. * models simple local behaviors
GPU-based Distributed Behavior Models with CUDA Courtesy: YouTube, ISIS Lab, Universita degli Studi di Salerno Bradly Alicea Introduction Flocking: Reynolds boids algorithm. * models simple local behaviors
Sketch-based Interface for Crowd Animation
 Sketch-based Interface for Crowd Animation Masaki Oshita 1, Yusuke Ogiwara 1 1 Kyushu Institute of Technology 680-4 Kawazu, Iizuka, Fukuoka, 820-8502, Japan oshita@ces.kyutech.ac.p ogiwara@cg.ces.kyutech.ac.p
Sketch-based Interface for Crowd Animation Masaki Oshita 1, Yusuke Ogiwara 1 1 Kyushu Institute of Technology 680-4 Kawazu, Iizuka, Fukuoka, 820-8502, Japan oshita@ces.kyutech.ac.p ogiwara@cg.ces.kyutech.ac.p
High-density Crowds. A masters student s journey to graphics and multi agent systems
 High-density Crowds A masters student s journey to graphics and multi agent systems Who am I and why am I here? Jack Shabo, student of CDATE, year 2012 Doing a degree project in Crowd Simulations with
High-density Crowds A masters student s journey to graphics and multi agent systems Who am I and why am I here? Jack Shabo, student of CDATE, year 2012 Doing a degree project in Crowd Simulations with
Dynamic Adaptive Disaster Simulation: A Predictive Model of Emergency Behavior Using Cell Phone and GIS Data 1
 Dynamic Adaptive Disaster Simulation: A Predictive Model of Emergency Behavior Using Cell Phone and GIS Data 1, Zhi Zhai, Greg Madey Dept. of Computer Science and Engineering University of Notre Dame Notre
Dynamic Adaptive Disaster Simulation: A Predictive Model of Emergency Behavior Using Cell Phone and GIS Data 1, Zhi Zhai, Greg Madey Dept. of Computer Science and Engineering University of Notre Dame Notre
Collaborators. Multiple Agents & Crowd Simulation: training sytems 5/15/2010. Interactive Multi-Robot Planning and Multi-Agent Simulation
 Interactive Multi-Robot Planning and Multi-Agent Simulation Dinesh Manocha UNC Chapel Hill dm@cs.unc.edu http://gamma.cs.unc.edu Collaborators Ming C. Lin Jur van der Berg Sean Curtis Russell Gayle Stephen
Interactive Multi-Robot Planning and Multi-Agent Simulation Dinesh Manocha UNC Chapel Hill dm@cs.unc.edu http://gamma.cs.unc.edu Collaborators Ming C. Lin Jur van der Berg Sean Curtis Russell Gayle Stephen
Large Scale Crowd Simulation Using A Hybrid Agent Model
 Large Scale Crowd Simulation Using A Hybrid Agent Model Seung In Park 1, Yong Cao 1, Francis Quek 1 1 Department of Computer Science, Virginia Polytechnic Institute and State University, Blacksburg, Virginia,
Large Scale Crowd Simulation Using A Hybrid Agent Model Seung In Park 1, Yong Cao 1, Francis Quek 1 1 Department of Computer Science, Virginia Polytechnic Institute and State University, Blacksburg, Virginia,
Bimodal Spatial Reasoning with Continuous Motion
 Bimodal Spatial Reasoning with Continuous Motion Samuel Wintermute and John E. Laird University of Michigan 2260 Hayward St. Ann Arbor, MI 48109-2121 {swinterm, laird}@umich.edu Abstract Symbolic AI systems
Bimodal Spatial Reasoning with Continuous Motion Samuel Wintermute and John E. Laird University of Michigan 2260 Hayward St. Ann Arbor, MI 48109-2121 {swinterm, laird}@umich.edu Abstract Symbolic AI systems
Under the Guidance of
 Presented by Linga Venkatesh (10305085) Deepak Jayanth (10305913) Under the Guidance of Prof. Parag Chaudhuri Flocking/Swarming/Schooling Nature Phenomenon Collective Behaviour by animals of same size
Presented by Linga Venkatesh (10305085) Deepak Jayanth (10305913) Under the Guidance of Prof. Parag Chaudhuri Flocking/Swarming/Schooling Nature Phenomenon Collective Behaviour by animals of same size
Real-Time Rendering of a Scene With Many Pedestrians
 2015 http://excel.fit.vutbr.cz Real-Time Rendering of a Scene With Many Pedestrians Va clav Pfudl Abstract The aim of this text was to describe implementation of software that would be able to simulate
2015 http://excel.fit.vutbr.cz Real-Time Rendering of a Scene With Many Pedestrians Va clav Pfudl Abstract The aim of this text was to describe implementation of software that would be able to simulate
Robotic Behaviors. Potential Field Methods
 Robotic Behaviors Potential field techniques - trajectory generation - closed feedback-loop control Design of variety of behaviors - motivated by potential field based approach steering behaviors Closed
Robotic Behaviors Potential field techniques - trajectory generation - closed feedback-loop control Design of variety of behaviors - motivated by potential field based approach steering behaviors Closed
Mindtree's video analytic software.
 Mindtree's video analytic software. Overview Mindtree s video analytics algorithms suite are low complexity algorithms that analyze video streams in real time and provide timely actionable information
Mindtree's video analytic software. Overview Mindtree s video analytics algorithms suite are low complexity algorithms that analyze video streams in real time and provide timely actionable information
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Modeling the Virtual World
 Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
Modeling the Virtual World Joaquim Madeira November, 2013 RVA - 2013/2014 1 A VR system architecture Modeling the Virtual World Geometry Physics Haptics VR Toolkits RVA - 2013/2014 2 VR object modeling
STEERING BEHAVIORS. Markéta Popelová, marketa.popelova [zavináč] matfyz.cz. 2012, Umělé Bytosti, MFF UK
![STEERING BEHAVIORS. Markéta Popelová, marketa.popelova [zavináč] matfyz.cz. 2012, Umělé Bytosti, MFF UK](/thumbs/74/70541553.jpg "STEERING BEHAVIORS. Markéta Popelová, marketa.popelova [zavináč] matfyz.cz. 2012, Umělé Bytosti, MFF UK") STEERING BEHAVIORS Markéta Popelová, marketa.popelova [zavináč] matfyz.cz 2012, Umělé Bytosti, MFF UK MOTIVATION MOTIVATION REQUIREMENTS FOR MOTION CONTROL Responding to dynamic environment Avoiding obstacles
STEERING BEHAVIORS Markéta Popelová, marketa.popelova [zavináč] matfyz.cz 2012, Umělé Bytosti, MFF UK MOTIVATION MOTIVATION REQUIREMENTS FOR MOTION CONTROL Responding to dynamic environment Avoiding obstacles
Measuring the Steps: Generating Action Transitions Between Locomotion Behaviours
 Measuring the Steps: Generating Action Transitions Between Locomotion Behaviours Christos Mousas Paul Newbury Department of Informatics University of Sussex East Sussex, Brighton BN1 9QH Email: {c.mousas,
Measuring the Steps: Generating Action Transitions Between Locomotion Behaviours Christos Mousas Paul Newbury Department of Informatics University of Sussex East Sussex, Brighton BN1 9QH Email: {c.mousas,
Duksu Kim. Professional Experience Senior researcher, KISTI High performance visualization
 Duksu Kim Assistant professor, KORATEHC Education Ph.D. Computer Science, KAIST Parallel Proximity Computation on Heterogeneous Computing Systems for Graphics Applications Professional Experience Senior
Duksu Kim Assistant professor, KORATEHC Education Ph.D. Computer Science, KAIST Parallel Proximity Computation on Heterogeneous Computing Systems for Graphics Applications Professional Experience Senior
Fast continuous collision detection among deformable Models using graphics processors CS-525 Presentation Presented by Harish
 Fast continuous collision detection among deformable Models using graphics processors CS-525 Presentation Presented by Harish Abstract: We present an interactive algorithm to perform continuous collision
Fast continuous collision detection among deformable Models using graphics processors CS-525 Presentation Presented by Harish Abstract: We present an interactive algorithm to perform continuous collision
MODELLING AND SIMULATION OF REALISTIC PEDESTRIAN BEHAVIOURS
 MODELLING AND SIMULATION OF REALISTIC PEDESTRIAN BEHAVIOURS KOH WEE LIT School Of Computer Engineering A thesis submitted to the Nanyang Technological University in fulfillment of the requirement for the
MODELLING AND SIMULATION OF REALISTIC PEDESTRIAN BEHAVIOURS KOH WEE LIT School Of Computer Engineering A thesis submitted to the Nanyang Technological University in fulfillment of the requirement for the
How do people queue? A study of different queuing models. TGF 2015 Delft, 28th October 2015
 How do people queue? A study of different queuing models TGF 2015 Delft, 28th October 2015 Motivation Whenever there are crowded spaces, queuing occurs Such queuing evolves in many different ways, depending
How do people queue? A study of different queuing models TGF 2015 Delft, 28th October 2015 Motivation Whenever there are crowded spaces, queuing occurs Such queuing evolves in many different ways, depending
REINFORCEMENT LEARNING: MDP APPLIED TO AUTONOMOUS NAVIGATION
 REINFORCEMENT LEARNING: MDP APPLIED TO AUTONOMOUS NAVIGATION ABSTRACT Mark A. Mueller Georgia Institute of Technology, Computer Science, Atlanta, GA USA The problem of autonomous vehicle navigation between
REINFORCEMENT LEARNING: MDP APPLIED TO AUTONOMOUS NAVIGATION ABSTRACT Mark A. Mueller Georgia Institute of Technology, Computer Science, Atlanta, GA USA The problem of autonomous vehicle navigation between
Large Scale Data Visualization. CSC 7443: Scientific Information Visualization
 Large Scale Data Visualization Large Datasets Large datasets: D >> 10 M D D: Hundreds of gigabytes to terabytes and even petabytes M D : 1 to 4 GB of RAM Examples: Single large data set Time-varying data
Large Scale Data Visualization Large Datasets Large datasets: D >> 10 M D D: Hundreds of gigabytes to terabytes and even petabytes M D : 1 to 4 GB of RAM Examples: Single large data set Time-varying data
CS 231. Deformation simulation (and faces)
") CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
CS 231 Deformation simulation (and faces) 1 Cloth Simulation deformable surface model Represent cloth model as a triangular or rectangular grid Points of finite mass as vertices Forces or energies of points
Animation. Itinerary Computer Graphics Lecture 22
 15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University Itinerary Review Basic Animation Keyed Animation Motion Capture Physically-Based Animation Behavioral
15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University Itinerary Review Basic Animation Keyed Animation Motion Capture Physically-Based Animation Behavioral
Introduction to behavior-recognition and object tracking
 Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Introduction to behavior-recognition and object tracking Xuan Mo ipal Group Meeting April 22, 2011 Outline Motivation of Behavior-recognition Four general groups of behaviors Core technologies Future direction
Generating sparse navigation graphs for microscopic pedestrian simulation models
 Generating sparse navigation graphs for microscopic pedestrian simulation models Angelika Kneidl 1, André Borrmann 1, Dirk Hartmann 2 1 Computational Modeling and Simulation Group, TU München, Germany
Generating sparse navigation graphs for microscopic pedestrian simulation models Angelika Kneidl 1, André Borrmann 1, Dirk Hartmann 2 1 Computational Modeling and Simulation Group, TU München, Germany
Autonomous and Mobile Robotics. Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof.
 Prof.") Autonomous and Mobile Robotics Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof. Giuseppe Oriolo Motivations task-constrained motion planning: find collision-free
Autonomous and Mobile Robotics Whole-body motion planning for humanoid robots (Slides prepared by Marco Cognetti) Prof. Giuseppe Oriolo Motivations task-constrained motion planning: find collision-free
Intelligent Agent Simulator in Massive Crowd
 Indonesian Journal of Electrical Engineering and Computer Science Vol. 11, No. 2, August 2018, pp. 577~584 ISSN: 2502-4752, DOI: 10.11591/ijeecs.v11.i2.pp577-584 577 Intelligent Agent Simulator in Massive
Indonesian Journal of Electrical Engineering and Computer Science Vol. 11, No. 2, August 2018, pp. 577~584 ISSN: 2502-4752, DOI: 10.11591/ijeecs.v11.i2.pp577-584 577 Intelligent Agent Simulator in Massive
Animation. Itinerary. What is Animation? What is Animation? Animation Methods. Modeling vs. Animation Computer Graphics Lecture 22
 15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University What is Animation? Making things move What is Animation? Consider a model with n parameters Polygon
15-462 Computer Graphics Lecture 22 Animation April 22, 2003 M. Ian Graham Carnegie Mellon University What is Animation? Making things move What is Animation? Consider a model with n parameters Polygon
Animal: An Agent-Based Model of Circulation logic for Dynamo
 Animal: An Agent-Based Model of Circulation logic for Dynamo CHRISTIAN SJOBERG ALIREZA KARDUNI CHRISTOPHER BEORKREM JEFFERSON ELLINGER The variety of quantitative optimizations available in BIM software
Animal: An Agent-Based Model of Circulation logic for Dynamo CHRISTIAN SJOBERG ALIREZA KARDUNI CHRISTOPHER BEORKREM JEFFERSON ELLINGER The variety of quantitative optimizations available in BIM software
Simulation of Optimized Evacuation Processes in Complex Buildings Using Cellular Automata Model
 1428 JOURNAL OF SOFTWARE, VOL. 9, NO. 6, JUNE 2014 Simulation of Optimized Evacuation Processes in Complex Buildings Using Cellular Automata Model Rong Xie International School of Software, Wuhan University,
1428 JOURNAL OF SOFTWARE, VOL. 9, NO. 6, JUNE 2014 Simulation of Optimized Evacuation Processes in Complex Buildings Using Cellular Automata Model Rong Xie International School of Software, Wuhan University,
Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation
 Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill lin@cs.unc.edu Joint work
Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill lin@cs.unc.edu Joint work
Crowd simulation of pedestrians in a virtual city
 Crowd simulation of pedestrians in a virtual city Submitted in partial fulfilment of the requirements of the degree Bachelor of Science (Honours) of Rhodes University Flora Ponjou Tasse November 3, 2008
Crowd simulation of pedestrians in a virtual city Submitted in partial fulfilment of the requirements of the degree Bachelor of Science (Honours) of Rhodes University Flora Ponjou Tasse November 3, 2008
Model-based Real-Time Estimation of Building Occupancy During Emergency Egress
 Model-based Real-Time Estimation of Building Occupancy During Emergency Egress Robert Tomastik 1, Satish Narayanan 2, Andrzej Banaszuk 3, and Sean Meyn 4 1 Pratt & Whitney 400 Main St., East Hartford,
Model-based Real-Time Estimation of Building Occupancy During Emergency Egress Robert Tomastik 1, Satish Narayanan 2, Andrzej Banaszuk 3, and Sean Meyn 4 1 Pratt & Whitney 400 Main St., East Hartford,
A 2-Stages Locomotion Planner for Digital Actors
 A 2-Stages Locomotion Planner for Digital Actors Julien Pettré LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse, FRANCE Jean-Paul Laumond LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse,
A 2-Stages Locomotion Planner for Digital Actors Julien Pettré LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse, FRANCE Jean-Paul Laumond LAAS-CNRS 7, avenue du Colonel Roche 31077 Cedex 4 Toulouse,
Parallel Direct Simulation Monte Carlo Computation Using CUDA on GPUs
 Parallel Direct Simulation Monte Carlo Computation Using CUDA on GPUs C.-C. Su a, C.-W. Hsieh b, M. R. Smith b, M. C. Jermy c and J.-S. Wu a a Department of Mechanical Engineering, National Chiao Tung
Parallel Direct Simulation Monte Carlo Computation Using CUDA on GPUs C.-C. Su a, C.-W. Hsieh b, M. R. Smith b, M. C. Jermy c and J.-S. Wu a a Department of Mechanical Engineering, National Chiao Tung
Fast BVH Construction on GPUs
 Fast BVH Construction on GPUs Published in EUROGRAGHICS, (2009) C. Lauterbach, M. Garland, S. Sengupta, D. Luebke, D. Manocha University of North Carolina at Chapel Hill NVIDIA University of California
Fast BVH Construction on GPUs Published in EUROGRAGHICS, (2009) C. Lauterbach, M. Garland, S. Sengupta, D. Luebke, D. Manocha University of North Carolina at Chapel Hill NVIDIA University of California
Path Planning Directed Motion Control of Virtual Humans in Complex Environments
 1 Path Planning Directed Motion Control of Virtual Humans in Complex Environments Song Song, Weibin Liu, Ruxiang Wei Institute of Information Science Beijing Jiaotong University Beijing Key Laboratory
1 Path Planning Directed Motion Control of Virtual Humans in Complex Environments Song Song, Weibin Liu, Ruxiang Wei Institute of Information Science Beijing Jiaotong University Beijing Key Laboratory
Computer Animation and Visualisation. Lecture 3. Motion capture and physically-based animation of characters
 Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Computer Animation and Visualisation Lecture 3. Motion capture and physically-based animation of characters Character Animation There are three methods Create them manually Use real human / animal motions
Last update: May 6, Robotics. CMSC 421: Chapter 25. CMSC 421: Chapter 25 1
 Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Last update: May 6, 2010 Robotics CMSC 421: Chapter 25 CMSC 421: Chapter 25 1 A machine to perform tasks What is a robot? Some level of autonomy and flexibility, in some type of environment Sensory-motor
Complex Systems Simulations on the GPU
 Complex Systems Simulations on the GPU Dr Paul Richmond Talk delivered by Peter Heywood University of Sheffield EMIT2015 Overview Complex Systems A Framework for Modelling Agents Benchmarking and Application
Complex Systems Simulations on the GPU Dr Paul Richmond Talk delivered by Peter Heywood University of Sheffield EMIT2015 Overview Complex Systems A Framework for Modelling Agents Benchmarking and Application
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos
 Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,
Definition, Detection, and Evaluation of Meeting Events in Airport Surveillance Videos Sung Chun Lee, Chang Huang, and Ram Nevatia University of Southern California, Los Angeles, CA 90089, USA sungchun@usc.edu,