Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation
|
|
|
- Fay Copeland
- 5 years ago
- Views:
Transcription
1 Real-time Path Planning and Navigation for Multi-Agent and Heterogeneous Crowd Simulation Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill Joint work with Avneesh Sud, Russell Gayle, Jur Van den Berg, Sean Curtis, Stephen Guy, Erik Andersen, and Dinesh Manocha Problem Definition Navigating to goal - important behavior in multiple agents (robots or virtual agents) simulation Navigation requires path planning Compute collision-free paths Satisfy constraints on the path
2 Applications Training and Mission Rehearsal Disaster Response Urban Warfare Multi-robot planning Human-Robot Interaction Demining Scenario Evaluation Evacuation Planning New Territory Exploration Challenges Path planning for multiple (thousands of) independent agents simultaneously Each agent is a dynamic obstacle Exact path planning for each agent in dynamic environments difficult


3 Goal Real-time path planning for heterogeneous crowds Non uniform distribution Independent goals Indoor Environment: Tradeshow Goal Real-time path planning for heterogeneous crowds Non uniform distribution Independent goals Large urban environments

4 Goal Real-time path planning for heterogeneous crowds in dynamic environments Moving obstacles Evolving navigable regions Weapons effects Safety zones Real-time Path Planning for Virtual Agents in Dynamic Environments [Sud et al.; IEEE VR 2007]
5 Multi-Agent Navigation Graph Unified data structure for path planning of multiple agents Computed using 1 st and 2 nd order Voronoi diagrams Multi-Agent Navigation Graph Unified data structure for path planning of multiple agents Computed using 1 st and 2 nd order Voronoi diagrams Advantage: Provides pairwise proximity information for all agents simultaneously Compute collision free paths of all agents from single MaNG
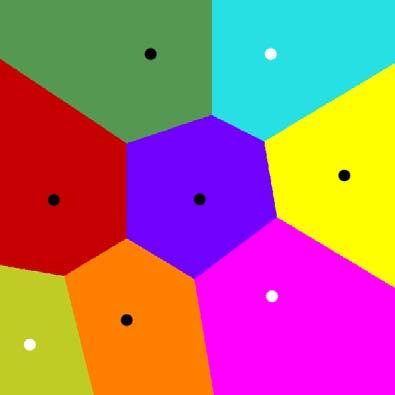
6 1 st Order Voronoi Diagram (VD 1 ) Agents Static Obstacle 1 st Order Voronoi Diagram (VD 1 ) Agents Static Obstacle
 VD 1 and VD 2 VD 1")
7 2 nd Order Voronoi Diagram (VD 2 ) VD 1 and VD 2 VD 1 VD 2


8 Voronoi Graphs VG 1 U VG 2 2 nd nearest nbr graph 2 nd order Voronoi graph 1 st order Voronoi graph
9 MaNG Subset of the 2 nd nearest neighbor graph Static Obstacle Multi-Agent Navigation Graph Unified data structure for path planning of multiple agents Computed using 1 st and 2 nd order Voronoi diagrams Advantage: Reduce omputation of many 1 st order Voronoi graphs to computation of a single MaNG
10 MaNG: Planner For each agent: 1. Connect agent (source) to VG 2 edges Agent MaNG: Planner For each agent: 1. Connect agent (source) to VG 2 edges 2. Connect destination to VG 1 edges
11 MaNG: Planner For each agent: 1. Connect agent (source) to VG 2 edges 2. Connect destination to VG 1 edges 3. Assign edge weights MaNG: Planner For each agent: 1. Connect agent (source) to VG 2 edges 2. Connect destination to VG 1 edges 3. Assign edge weights 4. Graph search
12 MaNG: Planner For each time step: Compute MaNG once Compute paths for all agents from same MaNG MaNG: Planner 2 nd order Voronoi diagram gives proximity to closest obstacle [Sud et al.06] Compute force fields at each step Repulsive forces from closest obstacle


![06] Culling techniques for fast 2D computation](/docs-images/87/97197427/images/13-2.jpg "(paper)")
13 MaNG Computation Computing exact Voronoi diagram difficult Non-linear boundaries High complexity MaNG Computation Computing exact Voronoi diagram difficult Compute Discrete Voronoi Diagram (DVD) Interactive computation using GPU [Sud et al. 06] Culling techniques for fast 2D computation (paper)
14 MaNG Computation Computing exact Voronoi diagram difficult Compute Discrete Voronoi Diagram (DVD) Compute closest site at finite set of points Undersampling Fixed grid resolution on GPU




 Demos Fruit")
15 Undersampling Disconnected Voronoi regions Complex graph Solution: Local tests to reduce graph complexity without changing connectivity (paper) Demos Fruit stealing Crowds in urban environment
16 Demos Fruit stealing Dynamic goal update Swarming behavior observed Crowds in urban environment Demo: Stealing Fruit 100-Agent simulation at 9 fps
17 Demos Fruit stealing Crowds in small urban environment Dynamic obstacles Demos: Crowd 100-Agent simulation at 10 fps
18 Main Approaches Adaptive Elastic Roadmaps (AERO): Connectivity graph structure that adapts to environment updates Pedestrian Levels of Detail (PLOD): Hierarchical data structure to accelerate large-scale crowd simulations Preliminary Results Interactive global path planning and local collision avoidance among virtual agents Capture independent behavior Individual goals, states
19 Preliminary Results Interactive global path planning and local collision avoidance among virtual agents Capture independent and collective behavior Individual goals, states Lane formation, oscillations Preliminary Results: Crowd Simulation

20 Adaptive Elastic ROadmaps Global connectivity graph for simultaneous path planning Continuously adapts to dynamic environment Deforms using local force models and global constraints Coherent agent motion Adaptive Elastic ROadmaps

21 Pedestrian Levels of Detail Hierarchical data structure to accelerate large-scale simulation of heterogeneous crowds Agents adaptively clustered based on pedestrian state = dynamic state, spatial proximity, behavior Efficient selective updates Empirically observed in real pedestrian flows Pedestrian Levels of Detail
22 Overview Adaptive Elastic Roadmap Environment (Static Obstacles, Dynamic Obstacles, and Agents) Scripted Behaviors PLOD Tree Event Queue Local Dynamics Collision Detection Demo: Maze agents navigating a maze 8 entry and exit points Closeup demonstrating lane formation

23 Demo: Maze Demo: Tradeshow Tradeshow attendees navigating an indoor environment of an exhibit hall 511 Booths agents visit multiple booths, stop at certain booths

24 Demo: Tradeshow Demo: City Environment Multiple city blocks, 924 buildings 2000 pedestrians 50 moving vehicles
25 Demo: City Environment Advantages Generality No assumption on motion Efficiency Selective hierarchical updates Computation using GPUs Global path planning with independent and collective effects
26 Summary Interactive global path planning and collision avoidance among thousands of virtual agents Application to heterogeneous crowd simulation Questions?
27 April 18, 2007 Reciprocal Velocity Obstacles for Mutli-Agent Navigation Independent Navigation Continuous cycle of sensing and acting (small time step Δt) Each cycle: each agent observes other agents (position, velocity) And select a new velocity for itself for the next cycle Problem: It does not know what the other agents are going to do How to act? (i.e. what velocity to select) Global planning vs. Local navigation Basic Idea Use position information of other agent, as well as velocity Assume other agents are moving obstacles (that maintain their current velocity for a while) Feurtey 00 Lamarche, Donikian 04 Reynolds 99 Velocity Obstacles [Fiorini, Shiller, 98] Case Study 3 - Part II - Ming Lin
 = {v A γ(p A, v A v B ) B A } Using Velocity")


28 April 18, 2007 Velocity Obstacle γ(p, v) = {p + tv t > 0} VO A B(v B ) = {v A γ(p A, v A v B ) B A } Using Velocity Obstacles In each cycle, select velocity outside velocity obstacle of any moving obstacle For multi-agent navigation? Agents are not passively moving, but react on each other Result: oscillations Case Study 3 - Part II - Ming Lin
29 April 18, 2007 New Approach Prevent oscillations No communication among agents or global coordination Simple idea: instead of choosing a new velocity outside the velocity obstacle, take the average of a velocity outside the velocity obstacle and the current velocity Formalized into Reciprocal Velocity Obstacle (RVO) Reciprocal Velocity Obstacle RVO A B(v B, v A ) = {v A 2v A v A VO A B(v B )} Case Study 3 - Part II - Ming Lin
30 April 18, 2007 Using RVO In each cycle, select velocity outside reciprocal velocity obstacle of any other agent Guaranteed to give safe navigation Guaranteed to prevent oscillations We use RVO as core operator of our navigation system Multi-Agent Navigation System n agents A 1,, A n with positions p 1,, p n, velocities v 1,, v n, preferred speeds v pref 1,, v pref n and goals g 1,, g n Each time step: for each agent: Compute preferred velocity Select new velocity (RVO) Update position of agent according to new velocity Case Study 3 - Part II - Ming Lin
31 April 18, 2007 Global Path Planning Global Path Planning Preprocessing Take only static obstacles into account Visibility graph (or other roadmap) Case Study 3 - Part II - Ming Lin
32 April 18, 2007 Select Preferred Velocity During simulation For each agent: Compute shortest path using roadmap Use direction along path as preferred velocity No local minima Select New Velocity Case Study 3 - Part II - Ming Lin

33 April 18, 2007 Select New Velocity Outside the union of the reciprocal velocity obstacles, closest to preferred velocity Select New Velocity Environment may become crowded: no valid velocity Solution: select velocity inside RVO but penalize Expected time to collision Distance to preferred velocity Select velocity with minimal penalty Case Study 3 - Part II - Ming Lin

34 April 18, 2007 Adding Realism Orientation and Kinodynamics Inferring Orientation Orientation in direction of motion Side-steps? Backsteps? Kinodynamic constraints Maximum velocity Maximum acceleration More complicated based on orientation Case Study 3 - Part II - Ming Lin
35 April 18, 2007 Selecting Neighbors Neighbor region More region (based on orientation) Results - Stadium scenario 250 agents entering a stadium four narrow entrances forming the word I3D2008 on the field 97 fps (without visualization) on an 8-core Intel Xeon 2.66 GHz Case Study 3 - Part II - Ming Lin
 on an 8-core Intel Xeon 2.")
36 April 18, 2007 Results - Stadium scenario Results - Office scenario 1000 agents evacuating an office building two narrow exits densely crowded scenario 46 fps (without visualization) on an 8-core Intel Xeon 2.66 GHz Case Study 3 - Part II - Ming Lin
 on an 8-core Intel Xeon 2.")
37 April 18, 2007 Results - Office scenario Results - Crosswalk scenario 100 agents in each corner of the crossroads move to other side of street opposite flow of agents: automatic lane formation 57 fps (without visualization) on an 8-core Intel Xeon 2.66 GHz Case Study 3 - Part II - Ming Lin

38 April 18, 2007 Results - Crosswalk scenario System Demonstrations Real-time Capture Case Study 3 - Part II - Ming Lin


39 April 18, 2007 Extension to 3D 500 agents on a sphere moving to the other side Composite Agents Case Study 3 - Part II - Ming Lin
40 April 18, 2007 Results - Scalability Performance (16 cores, Sitterson scene) Performance (5000 agents, Sitterson scene) Running time (sec/frame) Number of Agents Frame rate (frame/sec) Number of Cores Summary Powerful and simple (easy to implement) local collision avoidance technique for multi-agent navigation Allows for easy integration with global planning, kinodynamic constraints, visibility constraints, etc. Scalable with number of agents and number of processors used Application to Crowd Simulation & Games Case Study 3 - Part II - Ming Lin
41 April 18, 2007 Research Sponsors Army Research Office Defense Advanced Research Projects Agency Department of Energy (Fellowship) Intel Corporation National Science Foundation RDECOM Case Study 3 - Part II - Ming Lin
Collaborators. Multiple Agents & Crowd Simulation: training sytems 5/15/2010. Interactive Multi-Robot Planning and Multi-Agent Simulation
 Interactive Multi-Robot Planning and Multi-Agent Simulation Dinesh Manocha UNC Chapel Hill dm@cs.unc.edu http://gamma.cs.unc.edu Collaborators Ming C. Lin Jur van der Berg Sean Curtis Russell Gayle Stephen
Interactive Multi-Robot Planning and Multi-Agent Simulation Dinesh Manocha UNC Chapel Hill dm@cs.unc.edu http://gamma.cs.unc.edu Collaborators Ming C. Lin Jur van der Berg Sean Curtis Russell Gayle Stephen
Multi Agent Navigation on GPU. Avi Bleiweiss
 Multi Agent Navigation on GPU Avi Bleiweiss Reasoning Explicit Implicit Script, storytelling State machine, serial Compute intensive Fits SIMT architecture well Navigation planning Collision avoidance
Multi Agent Navigation on GPU Avi Bleiweiss Reasoning Explicit Implicit Script, storytelling State machine, serial Compute intensive Fits SIMT architecture well Navigation planning Collision avoidance
Crowd simulation. Taku Komura
 Crowd simulation Taku Komura Animating Crowds We have been going through methods to simulate individual characters What if we want to simulate the movement of crowds? Pedestrians in the streets Flock of
Crowd simulation Taku Komura Animating Crowds We have been going through methods to simulate individual characters What if we want to simulate the movement of crowds? Pedestrians in the streets Flock of
Reciprocal Collision Avoidance and Navigation for Video Games
 Reciprocal Collision Avoidance and Navigation for Video Games Jamie Snape, 1 Stephen J. Guy, 1 Deepak Vembar, 2 Adam Lake, 2 Ming C. Lin, 1 and Dinesh Manocha 11 1. Introduction COLLISION AVOIDANCE AND
Reciprocal Collision Avoidance and Navigation for Video Games Jamie Snape, 1 Stephen J. Guy, 1 Deepak Vembar, 2 Adam Lake, 2 Ming C. Lin, 1 and Dinesh Manocha 11 1. Introduction COLLISION AVOIDANCE AND
Scalable Multi Agent Simulation on the GPU. Avi Bleiweiss NVIDIA Corporation San Jose, 2009
 Scalable Multi Agent Simulation on the GPU Avi Bleiweiss NVIDIA Corporation San Jose, 2009 Reasoning Explicit State machine, serial Implicit Compute intensive Fits SIMT well Collision avoidance Motivation
Scalable Multi Agent Simulation on the GPU Avi Bleiweiss NVIDIA Corporation San Jose, 2009 Reasoning Explicit State machine, serial Implicit Compute intensive Fits SIMT well Collision avoidance Motivation
Interactive Modeling, Simulation and Control of Large-Scale Crowds and Traffic
 Interactive Modeling, Simulation and Control of Large-Scale Crowds and Traffic Ming C. Lin 1, Stephen Guy 1,RahulNarain 1, Jason Sewall 1, Sachin Patil 1, Jatin Chhugani 2, Abhinav Golas 1,JurvandenBerg
Interactive Modeling, Simulation and Control of Large-Scale Crowds and Traffic Ming C. Lin 1, Stephen Guy 1,RahulNarain 1, Jason Sewall 1, Sachin Patil 1, Jatin Chhugani 2, Abhinav Golas 1,JurvandenBerg
Simulating Group Formations Using RVO
 Simulating Group Formations Using RVO Martin Funkquist martinfu@kth.se Supervisor: Christopher Peters Staffan Sandberg stsand@kth.se May 25, 2016 Figure 1: From left to right. First figure displays a real
Simulating Group Formations Using RVO Martin Funkquist martinfu@kth.se Supervisor: Christopher Peters Staffan Sandberg stsand@kth.se May 25, 2016 Figure 1: From left to right. First figure displays a real
Deformable Distance Fields for Simulation of Non- Penetrating Flexible Bodies
 Deformable Distance Fields for Simulation of Non- Penetrating Flexible Bodies Susan Fisher and Ming C. Lin {sfisher, lin}@cs.unc.edu http://gamma.cs.unc.edu/ddf/ Department of Computer Science University
Deformable Distance Fields for Simulation of Non- Penetrating Flexible Bodies Susan Fisher and Ming C. Lin {sfisher, lin}@cs.unc.edu http://gamma.cs.unc.edu/ddf/ Department of Computer Science University
Goal Velocity Obstacles for Spatial Navigation of Multiple Autonomous Robots or Virtual Agents
 Goal Velocity Obstacles for Spatial Navigation of Multiple utonomous Robots or Virtual gents Jamie Snape and Dinesh Manocha University of North Carolina at Chapel Hill, Chapel Hill, NC 27599 {snape,dm}@cs.unc.edu
Goal Velocity Obstacles for Spatial Navigation of Multiple utonomous Robots or Virtual gents Jamie Snape and Dinesh Manocha University of North Carolina at Chapel Hill, Chapel Hill, NC 27599 {snape,dm}@cs.unc.edu
DiFi: Distance Fields - Fast Computation Using Graphics Hardware
 DiFi: Distance Fields - Fast Computation Using Graphics Hardware Avneesh Sud Dinesh Manocha UNC-Chapel Hill http://gamma.cs.unc.edu/difi Distance Fields Distance Function For a site a scalar function f:r
DiFi: Distance Fields - Fast Computation Using Graphics Hardware Avneesh Sud Dinesh Manocha UNC-Chapel Hill http://gamma.cs.unc.edu/difi Distance Fields Distance Function For a site a scalar function f:r
Robot Motion Planning
 Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Robot Motion Planning James Bruce Computer Science Department Carnegie Mellon University April 7, 2004 Agent Planning An agent is a situated entity which can choose and execute actions within in an environment.
Real-time Simulation of Heterogeneous Crowds
 Real-time Simulation of Heterogeneous Crowds Avneesh Sud Russell Gayle Stephen Guy Erik Andersen Ming Lin Dinesh Manocha Dept of Computer Science, University of North Carolina at Chapel Hill Figure 1:
Real-time Simulation of Heterogeneous Crowds Avneesh Sud Russell Gayle Stephen Guy Erik Andersen Ming Lin Dinesh Manocha Dept of Computer Science, University of North Carolina at Chapel Hill Figure 1:
A Predictive Collision Avoidance Model for Pedestrian Simulation
 A Predictive Collision Avoidance Model for Pedestrian Simulation Ioannis Karamouzas, Peter Heil, Pascal van Beek, and Mark H. Overmars Center for Advanced Gaming and Simulation, Utrecht University, The
A Predictive Collision Avoidance Model for Pedestrian Simulation Ioannis Karamouzas, Peter Heil, Pascal van Beek, and Mark H. Overmars Center for Advanced Gaming and Simulation, Utrecht University, The
ACCELERATING ROUTE PLANNING AND COLLISION DETECTION FOR COMPUTER GENERATED FORCES USING GPUS
 ACCELERATING ROUTE PLANNING AND COLLISION DETECTION FOR COMPUTER GENERATED FORCES USING GPUS David Tuft, Russell Gayle, Brian Salomon, Naga Govindaraju, Ming Lin, and Dinesh Manocha University of North
ACCELERATING ROUTE PLANNING AND COLLISION DETECTION FOR COMPUTER GENERATED FORCES USING GPUS David Tuft, Russell Gayle, Brian Salomon, Naga Govindaraju, Ming Lin, and Dinesh Manocha University of North
Collision Avoidance with Unity3d
 Collision Avoidance with Unity3d Jassiem Ifill September 12, 2013 Abstract The primary goal of the research presented in this paper is to achieve natural crowd simulation and collision avoidance within
Collision Avoidance with Unity3d Jassiem Ifill September 12, 2013 Abstract The primary goal of the research presented in this paper is to achieve natural crowd simulation and collision avoidance within
Modeling Collision Avoidance Behavior for Virtual Humans
 Modeling Collision voidance Behavior for Virtual Humans Stephen J. Guy Dept. of Computer Science UNC - Chapel Hill, NC sjguy@cs.unc.edu Ming C. Lin Dept. of Computer Science UNC - Chapel Hill, NC lin@cs.unc.edu
Modeling Collision voidance Behavior for Virtual Humans Stephen J. Guy Dept. of Computer Science UNC - Chapel Hill, NC sjguy@cs.unc.edu Ming C. Lin Dept. of Computer Science UNC - Chapel Hill, NC lin@cs.unc.edu
Goal. Interactive Walkthroughs using Multiple GPUs. Boeing 777. DoubleEagle Tanker Model
 Goal Interactive Walkthroughs using Multiple GPUs Dinesh Manocha University of North Carolina- Chapel Hill http://www.cs.unc.edu/~walk SIGGRAPH COURSE #11, 2003 Interactive Walkthrough of complex 3D environments
Goal Interactive Walkthroughs using Multiple GPUs Dinesh Manocha University of North Carolina- Chapel Hill http://www.cs.unc.edu/~walk SIGGRAPH COURSE #11, 2003 Interactive Walkthrough of complex 3D environments
Probabilistic Methods for Kinodynamic Path Planning
 16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
16.412/6.834J Cognitive Robotics February 7 th, 2005 Probabilistic Methods for Kinodynamic Path Planning Based on Past Student Lectures by: Paul Elliott, Aisha Walcott, Nathan Ickes and Stanislav Funiak
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Introduction to State-of-the-art Motion Planning Algorithms. Presented by Konstantinos Tsianos
 Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Introduction to State-of-the-art Motion Planning Algorithms Presented by Konstantinos Tsianos Robots need to move! Motion Robot motion must be continuous Geometric constraints Dynamic constraints Safety
Path Planning. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02 2399 3470 Path Planning Robotica for Computer Engineering students A.A. 2006/2007
Fast Proximity Computation among Deformable Models Using Discrete Voronoi Diagrams
 Fast Proximity Computation among Deformable Models Using Discrete Voronoi Diagrams Avneesh Sud Naga Govindaraju Russell Gayle Ilknur Kabul Dinesh Manocha Dept of Computer Science, University of North Carolina
Fast Proximity Computation among Deformable Models Using Discrete Voronoi Diagrams Avneesh Sud Naga Govindaraju Russell Gayle Ilknur Kabul Dinesh Manocha Dept of Computer Science, University of North Carolina
Efficient Multi-Agent Global Navigation Using Interpolating Bridges
 Efficient Multi-Agent Global Navigation Using Interpolating Bridges Liang He 1 and Jia Pan 2 and Dinesh Manocha 1 Abstract We present a novel approach for collision-free global navigation for continuous-time
Efficient Multi-Agent Global Navigation Using Interpolating Bridges Liang He 1 and Jia Pan 2 and Dinesh Manocha 1 Abstract We present a novel approach for collision-free global navigation for continuous-time
Collision Detection. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Computer Animation ILE5030 Computer Animation and Special Effects 2 Haptic
Collision Detection II. These slides are mainly from Ming Lin s course notes at UNC Chapel Hill
 Collision Detection II These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Some Possible Approaches Geometric methods Algebraic techniques Hierarchical
Collision Detection II These slides are mainly from Ming Lin s course notes at UNC Chapel Hill http://www.cs.unc.edu/~lin/comp259-s06/ Some Possible Approaches Geometric methods Algebraic techniques Hierarchical
Autonomous Mobile Robots, Chapter 6 Planning and Navigation Where am I going? How do I get there? Localization. Cognition. Real World Environment
 Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Planning and Navigation Where am I going? How do I get there?? Localization "Position" Global Map Cognition Environment Model Local Map Perception Real World Environment Path Motion Control Competencies
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017
 Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Geometric Path Planning McGill COMP 765 Oct 12 th, 2017 The Motion Planning Problem Intuition: Find a safe path/trajectory from start to goal More precisely: A path is a series of robot configurations
Collision Detection. Motivation - Dynamic Simulation ETH Zurich. Motivation - Path Planning ETH Zurich. Motivation - Biomedical Simulation ETH Zurich
 Collision Detection Motivation - Dynamic Simulation Collision detection is an essential part of physically realistic dynamic simulations. For each time step: compute dynamics detect collisions resolve
Collision Detection Motivation - Dynamic Simulation Collision detection is an essential part of physically realistic dynamic simulations. For each time step: compute dynamics detect collisions resolve
Motion Planning. Howie CHoset
 Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Motion Planning Howie CHoset Questions Where are we? Where do we go? Which is more important? Encoders Encoders Incremental Photodetector Encoder disk LED Photoemitter Encoders - Incremental Encoders -
Agent Based Intersection Traffic Simulation
 Agent Based Intersection Traffic Simulation David Wilkie May 7, 2009 Abstract This project focuses on simulating the traffic at an intersection using agent-based planning and behavioral methods. The motivation
Agent Based Intersection Traffic Simulation David Wilkie May 7, 2009 Abstract This project focuses on simulating the traffic at an intersection using agent-based planning and behavioral methods. The motivation
arxiv: v1 [cs.cv] 27 Sep 2018
![arxiv: v1 [cs.cv] 27 Sep 2018](/thumbs/87/96902752.jpg "arxiv: v1 [cs.cv] 27 Sep 2018") Interactive Surveillance Technologies for Dense Crowds Aniket Bera Department of Computer Science University of North Carolina at Chapel Hill Chapel Hill, NC Dinesh Manocha Department of Computer Science
Interactive Surveillance Technologies for Dense Crowds Aniket Bera Department of Computer Science University of North Carolina at Chapel Hill Chapel Hill, NC Dinesh Manocha Department of Computer Science
Space-time Group Motion Planning
 Space-time Group Motion Planning Ioannis Karamouzas, Roland Geraerts, A. Frank van der Stappen Abstract We present a novel approach for planning and directing heterogeneous groups of virtual agents based
Space-time Group Motion Planning Ioannis Karamouzas, Roland Geraerts, A. Frank van der Stappen Abstract We present a novel approach for planning and directing heterogeneous groups of virtual agents based
Robotics Tasks. CS 188: Artificial Intelligence Spring Manipulator Robots. Mobile Robots. Degrees of Freedom. Sensors and Effectors
 CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
CS 188: Artificial Intelligence Spring 2006 Lecture 5: Robot Motion Planning 1/31/2006 Dan Klein UC Berkeley Many slides from either Stuart Russell or Andrew Moore Motion planning (today) How to move from
GPU-based Distributed Behavior Models with CUDA
 GPU-based Distributed Behavior Models with CUDA Courtesy: YouTube, ISIS Lab, Universita degli Studi di Salerno Bradly Alicea Introduction Flocking: Reynolds boids algorithm. * models simple local behaviors
GPU-based Distributed Behavior Models with CUDA Courtesy: YouTube, ISIS Lab, Universita degli Studi di Salerno Bradly Alicea Introduction Flocking: Reynolds boids algorithm. * models simple local behaviors
Reactive Deformation Roadmaps: Motion Planning of Multiple Robots in Dynamic Environments
 Reactive Deformation Roadmaps: Motion Planning of Multiple Robots in Dynamic Environments Russell Gayle Avneesh Sud Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina
Reactive Deformation Roadmaps: Motion Planning of Multiple Robots in Dynamic Environments Russell Gayle Avneesh Sud Ming C. Lin Dinesh Manocha Department of Computer Science University of North Carolina
Strategies for simulating pedestrian navigation with multiple reinforcement learning agents
 Strategies for simulating pedestrian navigation with multiple reinforcement learning agents Francisco Martinez-Gil, Miguel Lozano, Fernando Ferna ndez Presented by: Daniel Geschwender 9/29/2016 1 Overview
Strategies for simulating pedestrian navigation with multiple reinforcement learning agents Francisco Martinez-Gil, Miguel Lozano, Fernando Ferna ndez Presented by: Daniel Geschwender 9/29/2016 1 Overview
Navigation Queries from Triangular Meshes
 In Proceedings of the Third International Conference on Motion in Games (MIG), 2010 Navigation Queries from Triangular Meshes Marcelo Kallmann University of California, Merced Abstract. Navigation meshes
In Proceedings of the Third International Conference on Motion in Games (MIG), 2010 Navigation Queries from Triangular Meshes Marcelo Kallmann University of California, Merced Abstract. Navigation meshes
CS 4649/7649 Robot Intelligence: Planning
 CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
CS 4649/7649 Robot Intelligence: Planning Probabilistic Roadmaps Sungmoon Joo School of Interactive Computing College of Computing Georgia Institute of Technology S. Joo (sungmoon.joo@cc.gatech.edu) 1
Collision and Proximity Queries
 Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Collision and Proximity Queries Dinesh Manocha (based on slides from Ming Lin) COMP790-058 Fall 2013 Geometric Proximity Queries l Given two object, how would you check: If they intersect with each other
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go)
 Steering, Flocking, Formations (behavior involving how to go)") Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Graphs, Search, Pathfinding (behavior involving where to go) Steering, Flocking, Formations (behavior involving how to go) Class N-2 1. What are some benefits of path networks? 2. Cons of path networks?
Real-Time Multi-Agent Path Planning on Arbitrary Surfaces
 Real-Time Multi-Agent Path Planning on Arbitrary Surfaces Rafael P. Torchelsen1 Luiz F. Scheidegger1 Guilherme N. Oliveira1 Rui Bastos2 Joa o L. D. Comba1 1 Instituto de Informa tica - PPGC, UFRGS - Brazil
Real-Time Multi-Agent Path Planning on Arbitrary Surfaces Rafael P. Torchelsen1 Luiz F. Scheidegger1 Guilherme N. Oliveira1 Rui Bastos2 Joa o L. D. Comba1 1 Instituto de Informa tica - PPGC, UFRGS - Brazil
Aggregate Dynamics for Dense Crowd Simulation
 Aggregate Dynamics for Dense Crowd Simulation Rahul Narain Abhinav Golas Sean Curtis Ming C. Lin University of North Carolina at Chapel Hill (a) (b) (c) Figure 1: Some examples of large, dense crowds simulated
Aggregate Dynamics for Dense Crowd Simulation Rahul Narain Abhinav Golas Sean Curtis Ming C. Lin University of North Carolina at Chapel Hill (a) (b) (c) Figure 1: Some examples of large, dense crowds simulated
Crowd simulation. Summerschool Utrecht: Multidisciplinary Game Research. Dr. Roland Geraerts 23 August 2017
 Crowd simulation Summerschool Utrecht: Multidisciplinary Game Research Dr. Roland Geraerts 23 August 2017 1 Societal relevance of crowd simulation The number of environments with big crowds are growing
Crowd simulation Summerschool Utrecht: Multidisciplinary Game Research Dr. Roland Geraerts 23 August 2017 1 Societal relevance of crowd simulation The number of environments with big crowds are growing
Collision Avoidance for Preplanned Locomotion
 22 Collision Avoidance for Preplanned Locomotion Bobby Anguelov 22.1 Introduction 22.2 Collision Avoidance for Preplanned Locomotion 22.3 Collision Detection and Trivial Collision Resolution 22.4 Nontrivial
22 Collision Avoidance for Preplanned Locomotion Bobby Anguelov 22.1 Introduction 22.2 Collision Avoidance for Preplanned Locomotion 22.3 Collision Detection and Trivial Collision Resolution 22.4 Nontrivial
Multi Agent Navigation on the GPU
 Multi Agent Navigation on the GPU Avi Bleiweiss NVIDIA Corporation ableiweiss@nvidia.com Abstract We present a unique and elegant graphics hardware realization of multi agent simulation. Specifically,
Multi Agent Navigation on the GPU Avi Bleiweiss NVIDIA Corporation ableiweiss@nvidia.com Abstract We present a unique and elegant graphics hardware realization of multi agent simulation. Specifically,
Chapter 12. Path Planning. Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 2012,
 Chapter 12 Path Planning Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 12: Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Chapter 12 Path Planning Beard & McLain, Small Unmanned Aircraft, Princeton University Press, 212, Chapter 12: Slide 1 Control Architecture destination, obstacles map path planner waypoints status path
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Robot Motion Control Matteo Matteucci
 Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
Robot Motion Control Open loop control A mobile robot is meant to move from one place to another Pre-compute a smooth trajectory based on motion segments (e.g., line and circle segments) from start to
CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies
 CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies Harald Schmidl Nolan Walker Ming C. Lin {schmidl walkern lin}@cs.unc.edu Department of Computer Science Sitterson Hall,
CAB: Fast Update of OBB Trees for Collision Detection between Articulated Bodies Harald Schmidl Nolan Walker Ming C. Lin {schmidl walkern lin}@cs.unc.edu Department of Computer Science Sitterson Hall,
Sung-Eui Yoon ( 윤성의 )
") Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Path Planning for Point Robots Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/mpa Class Objectives Motion planning framework Classic motion planning approaches 2 3 Configuration Space:
Announcements. CS 188: Artificial Intelligence Fall Robot motion planning! Today. Robotics Tasks. Mobile Robots
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Announcements Project 1 due (yesterday)! Project 2 (Pacman with ghosts) up in a few days Reminder: you are allowed to
CS 188: Artificial Intelligence Fall Announcements
 CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
CS 188: Artificial Intelligence Fall 2007 Lecture 6: Robot Motion Planning 9/13/2007 Dan Klein UC Berkeley Many slides over the course adapted from either Stuart Russell or Andrew Moore Announcements Project
A comparative study of k-nearest neighbour techniques in crowd simulation
 A comparative study of k-nearest neighbour techniques in crowd simulation Jordi Vermeulen Arne Hillebrand Roland Geraerts Department of Information and Computing Sciences Utrecht University, The Netherlands
A comparative study of k-nearest neighbour techniques in crowd simulation Jordi Vermeulen Arne Hillebrand Roland Geraerts Department of Information and Computing Sciences Utrecht University, The Netherlands
Realtime Anomaly Detection using Trajectory-level Crowd Behavior Learning
 Realtime Anomaly Detection using Trajectory-level Crowd Behavior Learning Aniket Bera University of North Carolina Chapel Hill, NC, USA ab@cs.unc.edu Sujeong Kim SRI International Princeton, NJ, USA sujeong.kim@sri.com
Realtime Anomaly Detection using Trajectory-level Crowd Behavior Learning Aniket Bera University of North Carolina Chapel Hill, NC, USA ab@cs.unc.edu Sujeong Kim SRI International Princeton, NJ, USA sujeong.kim@sri.com
Deformable and Fracturing Objects
 Interactive ti Collision i Detection ti for Deformable and Fracturing Objects Sung-Eui Yoon ( 윤성의 ) IWON associate professor KAIST http://sglab.kaist.ac.kr/~sungeui/ Acknowledgements Research collaborators
Interactive ti Collision i Detection ti for Deformable and Fracturing Objects Sung-Eui Yoon ( 윤성의 ) IWON associate professor KAIST http://sglab.kaist.ac.kr/~sungeui/ Acknowledgements Research collaborators
DenseSense: Interactive Crowd Simulation using Density-Dependent Filters
 Eurographics/ ACM SIGGRAPH Symposium on Computer Animation (2014) Vladlen Koltun and Eftychios Sifakis (Editors) DenseSense: Interactive Crowd Simulation using Density-Dependent Filters A. Best and S.
Eurographics/ ACM SIGGRAPH Symposium on Computer Animation (2014) Vladlen Koltun and Eftychios Sifakis (Editors) DenseSense: Interactive Crowd Simulation using Density-Dependent Filters A. Best and S.
Planning in Mobile Robotics
 Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
Planning in Mobile Robotics Part I. Miroslav Kulich Intelligent and Mobile Robotics Group Gerstner Laboratory for Intelligent Decision Making and Control Czech Technical University in Prague Tuesday 26/07/2011
CS 378: Computer Game Technology
 CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
CS 378: Computer Game Technology Dynamic Path Planning, Flocking Spring 2012 University of Texas at Austin CS 378 Game Technology Don Fussell Dynamic Path Planning! What happens when the environment changes
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space
 ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
ECE276B: Planning & Learning in Robotics Lecture 5: Configuration Space Lecturer: Nikolay Atanasov: natanasov@ucsd.edu Teaching Assistants: Tianyu Wang: tiw161@eng.ucsd.edu Yongxi Lu: yol070@eng.ucsd.edu
Collision Detection based on Spatial Partitioning
 Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Simulation in Computer Graphics Collision Detection based on Spatial Partitioning Matthias Teschner Computer Science Department University of Freiburg Outline introduction uniform grid Octree and k-d tree
Fast Line-of-Sight Computations in Complex Environments
 Fast Line-of-Sight Computations in Complex Environments David Tuft Brian Salomon Sean Hanlon Dinesh Manocha Dept. of Computer Science Univ. of North Carolina at Chapel Hill Chapel Hill, NC 27599-3175 USA
Fast Line-of-Sight Computations in Complex Environments David Tuft Brian Salomon Sean Hanlon Dinesh Manocha Dept. of Computer Science Univ. of North Carolina at Chapel Hill Chapel Hill, NC 27599-3175 USA
Automatic Construction of High Quality Roadmaps for Path Planning
 Automatic Construction of High Quality Roadmaps for Path Planning D.Nieuwenhuisen A.Kamphuis M.Mooijekind M.H.Overmars institute of information and computing sciences, utrecht university technical report
Automatic Construction of High Quality Roadmaps for Path Planning D.Nieuwenhuisen A.Kamphuis M.Mooijekind M.H.Overmars institute of information and computing sciences, utrecht university technical report
CS 231. Crowd Simulation. Outline. Introduction to Crowd Simulation. Flocking Social Forces 2D Cellular Automaton Continuum Crowds
 CS 231 Crowd Simulation Outline Introduction to Crowd Simulation Fields of Study & Applications Visualization vs. Realism Microscopic vs. Macroscopic Flocking Social Forces 2D Cellular Automaton Continuum
CS 231 Crowd Simulation Outline Introduction to Crowd Simulation Fields of Study & Applications Visualization vs. Realism Microscopic vs. Macroscopic Flocking Social Forces 2D Cellular Automaton Continuum
Real-time Continuous Collision Detection and Penetration Depth Computation
 Real-time Continuous Collision Detection and Penetration Depth Computation Young J. Kim http://graphics.ewha.ac.kr Ewha Womans University Non-penetration Constraint No overlap between geometric objects
Real-time Continuous Collision Detection and Penetration Depth Computation Young J. Kim http://graphics.ewha.ac.kr Ewha Womans University Non-penetration Constraint No overlap between geometric objects
Local Search Methods. CS 188: Artificial Intelligence Fall Announcements. Hill Climbing. Hill Climbing Diagram. Today
 CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
CS 188: Artificial Intelligence Fall 2006 Lecture 5: Robot Motion Planning 9/14/2006 Local Search Methods Queue-based algorithms keep fallback options (backtracking) Local search: improve what you have
Large Scale Crowd Simulation Using A Hybrid Agent Model
 Large Scale Crowd Simulation Using A Hybrid Agent Model Seung In Park 1, Yong Cao 1, Francis Quek 1 1 Department of Computer Science, Virginia Polytechnic Institute and State University, Blacksburg, Virginia,
Large Scale Crowd Simulation Using A Hybrid Agent Model Seung In Park 1, Yong Cao 1, Francis Quek 1 1 Department of Computer Science, Virginia Polytechnic Institute and State University, Blacksburg, Virginia,
Robotic Motion Planning: Review C-Space and Start Potential Functions
 Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Robotic Motion Planning: Review C-Space and Start Potential Functions Robotics Institute 16-735 http://www.cs.cmu.edu/~motionplanning Howie Choset http://www.cs.cmu.edu/~choset What if the robot is not
Particle Systems. Typical Time Step. Particle Generation. Controlling Groups of Objects: Particle Systems. Flocks and Schools
 Particle Systems Controlling Groups of Objects: Particle Systems Flocks and Schools A complex, fuzzy system represented by a large collection of individual elements. Each element has simple behavior and
Particle Systems Controlling Groups of Objects: Particle Systems Flocks and Schools A complex, fuzzy system represented by a large collection of individual elements. Each element has simple behavior and
Collision Detection with Bounding Volume Hierarchies
 Simulation in Computer Graphics Collision Detection with Bounding Volume Hierarchies Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volumes BV hierarchies
Simulation in Computer Graphics Collision Detection with Bounding Volume Hierarchies Matthias Teschner Computer Science Department University of Freiburg Outline introduction bounding volumes BV hierarchies
CMU-Q Lecture 4: Path Planning. Teacher: Gianni A. Di Caro
 CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
CMU-Q 15-381 Lecture 4: Path Planning Teacher: Gianni A. Di Caro APPLICATION: MOTION PLANNING Path planning: computing a continuous sequence ( a path ) of configurations (states) between an initial configuration
video 1 video 2 Motion Planning (It s all in the discretization) Digital Actors Basic problem Basic problem Two Possible Discretizations
 Digital Actors Basic problem Basic problem Two Possible Discretizations") Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Motion Planning (It s all in the discretization) Motion planning is the ability for an agent to compute its own motions in order to achieve certain goals. ll autonomous robots and digital actors should
Advanced Robotics Path Planning & Navigation
 Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
Advanced Robotics Path Planning & Navigation 1 Agenda Motivation Basic Definitions Configuration Space Global Planning Local Planning Obstacle Avoidance ROS Navigation Stack 2 Literature Choset, Lynch,
W4. Perception & Situation Awareness & Decision making
 W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
W4. Perception & Situation Awareness & Decision making Robot Perception for Dynamic environments: Outline & DP-Grids concept Dynamic Probabilistic Grids Bayesian Occupancy Filter concept Dynamic Probabilistic
AUTONOMOUS TAWAF CROWD SIMULATION. Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari
 BORNEO SCIENCE 36 (2): SEPTEMBER 2015 AUTONOMOUS TAWAF CROWD SIMULATION Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari MaGIC-X (Media and Games Innonovation Centre of Excellence UTM-IRDA
BORNEO SCIENCE 36 (2): SEPTEMBER 2015 AUTONOMOUS TAWAF CROWD SIMULATION Ahmad Zakwan Azizul Fata, Mohd Shafry Mohd Rahim, Sarudin Kari MaGIC-X (Media and Games Innonovation Centre of Excellence UTM-IRDA
Real-time Navigation of Independent Agents Using Adaptive Roadmaps
 Real-time Navigation of Independent Agents Using Adaptive Roadmaps AvneeshSud RussellGayle ErikAndersen StephenGuy MingLin DineshManocha Dept of Computer Science, University of North Carolina at Chapel
Real-time Navigation of Independent Agents Using Adaptive Roadmaps AvneeshSud RussellGayle ErikAndersen StephenGuy MingLin DineshManocha Dept of Computer Science, University of North Carolina at Chapel
Simulation in Computer Graphics Space Subdivision. Matthias Teschner
 Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Simulation in Computer Graphics Space Subdivision Matthias Teschner Outline Introduction Uniform grid Octree and k-d tree BSP tree University of Freiburg Computer Science Department 2 Model Partitioning
Sound in Nature. Collisions lead to surface vibrations Vibrations create pressure waves in air Pressure waves are sensed by ear
 Sound in Nature Collisions lead to surface vibrations Vibrations create pressure waves in air Pressure waves are sensed by ear Vibration Pressure Wave Perception Physically Based Sound Generate Sounds
Sound in Nature Collisions lead to surface vibrations Vibrations create pressure waves in air Pressure waves are sensed by ear Vibration Pressure Wave Perception Physically Based Sound Generate Sounds
A Fast Method for Local Penetration Depth Computation. Stephane Redon and Ming C. Lin
 A Fast Method for Local Penetration Depth Computation Stephane Redon and Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill Abstract This paper presents a fast method
A Fast Method for Local Penetration Depth Computation Stephane Redon and Ming C. Lin Department of Computer Science University of North Carolina at Chapel Hill Abstract This paper presents a fast method
Cognitive Robotics Robot Motion Planning Matteo Matteucci
 Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Cognitive Robotics Robot Motion Planning Robot Motion Planning eminently necessary since, by definition, a robot accomplishes tasks by moving in the real world. J.-C. Latombe (1991) Robot Motion Planning
Configuration Space of a Robot
 Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
Robot Path Planning Overview: 1. Visibility Graphs 2. Voronoi Graphs 3. Potential Fields 4. Sampling-Based Planners PRM: Probabilistic Roadmap Methods RRTs: Rapidly-exploring Random Trees Configuration
An Open Framework for Developing, Evaluating, and Sharing Steering Algorithms
 An Open Framework for Developing, Evaluating, and Sharing Steering Algorithms Shawn Singh, Mubbasir Kapadia, Petros Faloutsos, and Glenn Reinman University of California, Los Angeles Abstract. There are
An Open Framework for Developing, Evaluating, and Sharing Steering Algorithms Shawn Singh, Mubbasir Kapadia, Petros Faloutsos, and Glenn Reinman University of California, Los Angeles Abstract. There are
Adding Virtual Characters to the Virtual Worlds. Yiorgos Chrysanthou Department of Computer Science University of Cyprus
 Adding Virtual Characters to the Virtual Worlds Yiorgos Chrysanthou Department of Computer Science University of Cyprus Cities need people However realistic the model is, without people it does not have
Adding Virtual Characters to the Virtual Worlds Yiorgos Chrysanthou Department of Computer Science University of Cyprus Cities need people However realistic the model is, without people it does not have
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning
 6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
6.141: Robotics systems and science Lecture 10: Implementing Motion Planning Lecture Notes Prepared by N. Roy and D. Rus EECS/MIT Spring 2011 Reading: Chapter 3, and Craig: Robotics http://courses.csail.mit.edu/6.141/!
Path Planning for Point Robots. NUS CS 5247 David Hsu
 Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Path Planning for Point Robots NUS CS 5247 David Hsu Problem Input Robot represented as a point in the plane Obstacles represented as polygons Initial and goal positions Output A collision-free path between
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots
 Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
Variable-resolution Velocity Roadmap Generation Considering Safety Constraints for Mobile Robots Jingyu Xiang, Yuichi Tazaki, Tatsuya Suzuki and B. Levedahl Abstract This research develops a new roadmap
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING
 MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
MEV 442: Introduction to Robotics - Module 3 INTRODUCTION TO ROBOT PATH PLANNING THE PATH PLANNING PROBLEM The robot should find out a path enables the continuous motion of a robot from an initial configuration
Smooth and Collision-Free Navigation for Multiple Robots Under Differential-Drive Constraints
 Smooth and Collision-Free Navigation for Multiple Robots Under Differential-Drive Constraints Jamie Snape, Student Member, IEEE, Jur van den Berg, Stephen J. Guy, and Dinesh Manocha Abstract We present
Smooth and Collision-Free Navigation for Multiple Robots Under Differential-Drive Constraints Jamie Snape, Student Member, IEEE, Jur van den Berg, Stephen J. Guy, and Dinesh Manocha Abstract We present
URBAN SCALE CROWD DATA ANALYSIS, SIMULATION, AND VISUALIZATION
 www.bsc.es URBAN SCALE CROWD DATA ANALYSIS, SIMULATION, AND VISUALIZATION Isaac Rudomin May 2017 ABSTRACT We'll dive deep into how we use heterogeneous clusters with GPUs for accelerating urban-scale crowd
www.bsc.es URBAN SCALE CROWD DATA ANALYSIS, SIMULATION, AND VISUALIZATION Isaac Rudomin May 2017 ABSTRACT We'll dive deep into how we use heterogeneous clusters with GPUs for accelerating urban-scale crowd
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning
 Part IV: Intelligent Machines and Robotics Planning") Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Introduction to Information Science and Technology (IST) Part IV: Intelligent Machines and Robotics Planning Sören Schwertfeger / 师泽仁 ShanghaiTech University ShanghaiTech University - SIST - 10.05.2017
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning
 Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Algorithms for Sensor-Based Robotics: Sampling-Based Motion Planning Computer Science 336 http://www.cs.jhu.edu/~hager/teaching/cs336 Professor Hager http://www.cs.jhu.edu/~hager Recall Earlier Methods
Duksu Kim. Professional Experience Senior researcher, KISTI High performance visualization
 Duksu Kim Assistant professor, KORATEHC Education Ph.D. Computer Science, KAIST Parallel Proximity Computation on Heterogeneous Computing Systems for Graphics Applications Professional Experience Senior
Duksu Kim Assistant professor, KORATEHC Education Ph.D. Computer Science, KAIST Parallel Proximity Computation on Heterogeneous Computing Systems for Graphics Applications Professional Experience Senior
Introduction to Mobile Robotics Path and Motion Planning. Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello
 Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Introduction to Mobile Robotics Path and Motion Planning Wolfram Burgard, Cyrill Stachniss, Maren Bennewitz, Diego Tipaldi, Luciano Spinello 1 Motion Planning Latombe (1991): eminently necessary since,
Approximate path planning. Computational Geometry csci3250 Laura Toma Bowdoin College
 Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Approximate path planning Computational Geometry csci3250 Laura Toma Bowdoin College Outline Path planning Combinatorial Approximate Combinatorial path planning Idea: Compute free C-space combinatorially
Lecture 3: Motion Planning 2
 CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
CS 294-115 Algorithmic Human-Robot Interaction Fall 2017 Lecture 3: Motion Planning 2 Scribes: David Chan and Liting Sun - Adapted from F2016 Notes by Molly Nicholas and Chelsea Zhang 3.1 Previously Recall
Kinodynamic Motion Planning on Roadmaps in Dynamic Environments
 Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 ThD11.1 Kinodynamic Motion Planning on Roadmaps in Dynamic Environments
Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems San Diego, CA, USA, Oct 29 - Nov 2, 2007 ThD11.1 Kinodynamic Motion Planning on Roadmaps in Dynamic Environments
Way Portals: Efficient Multi-Agent Navigation with Line-Segment Goals
 Way Portals: Efficient Multi-Agent Navigation with Line-Segment Goals Sean Curtis Jamie Snape Dinesh Manocha University of North Carolina at Chapel Hill http://gamma.cs.unc.edu/wayportals Abstract It is
Way Portals: Efficient Multi-Agent Navigation with Line-Segment Goals Sean Curtis Jamie Snape Dinesh Manocha University of North Carolina at Chapel Hill http://gamma.cs.unc.edu/wayportals Abstract It is
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization
 Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Mobile Robot Path Planning in Static Environments using Particle Swarm Optimization M. Shahab Alam, M. Usman Rafique, and M. Umer Khan Abstract Motion planning is a key element of robotics since it empowers
Digital Sound Ming C. Lin & Zhimin Ren
 Digital Sound Ming C. Lin & Zhimin Ren Department of Computer Science University of North Carolina http://gamma.cs.unc.edu/sound How can it be done? Foley artists manually make and record the sound from
Digital Sound Ming C. Lin & Zhimin Ren Department of Computer Science University of North Carolina http://gamma.cs.unc.edu/sound How can it be done? Foley artists manually make and record the sound from
CROWD SIMULATION AS A SERVICE
 CROWD SIMULATION AS A SERVICE Client dr. Roland Geraerts (r.j.geraerts@uu.nl) Virtual Worlds Dept. of Information and computing sciences Utrecht University (version 13 12 2017) Screenshot of a crowd simulation
CROWD SIMULATION AS A SERVICE Client dr. Roland Geraerts (r.j.geraerts@uu.nl) Virtual Worlds Dept. of Information and computing sciences Utrecht University (version 13 12 2017) Screenshot of a crowd simulation
11 Behavioural Animation. Chapter 11. Behavioural Animation. Department of Computer Science and Engineering 11-1
 Chapter 11 Behavioural Animation 11-1 Behavioral Animation Knowing the environment Aggregate behavior Primitive behavior Intelligent behavior Crowd management 11-2 Behavioral Animation 11-3 Knowing the
Chapter 11 Behavioural Animation 11-1 Behavioral Animation Knowing the environment Aggregate behavior Primitive behavior Intelligent behavior Crowd management 11-2 Behavioral Animation 11-3 Knowing the