From Timed Automata to Stochastic Hybrid Games
|
|
|
- Anis Fletcher
- 5 years ago
- Views:
Transcription

1 From Timed Automata to Stochastic Hybrid Games Model Checking, Performance Analysis, Optimization, Synthesis, and Machine Learning Kim G. Larsen Aalborg University, DENMARK
 Stochastic Timed Automata Stochastic Semantics Statistical Model Checking Stochastic Hybrid Automata Timed Games & Interfaces Strategies, Symbolic")

2 Topics Timed Automata Decidability (regions) Symbolic Verification (zones) Priced Timed Automata Decidability (priced regions) Symbolic Verification (priced zones) Stochastic Timed Automata Stochastic Semantics Statistical Model Checking Stochastic Hybrid Automata Timed Games & Interfaces Strategies, Symbolic Synthesis Refinement Stochastic Priced Timed Games Strategies Symbolic Synthesis (zones) Stochastic Strategies Reinforcement Learning Verification Optimization Synthesis Component Testing Performance Analysis Optimal Synthesis CLASSIC CORA TIGA ECDAR TRON SMC STRATEGO 1995 TU Graz, May 2017 Kim Larsen [2]
3 Priced Timed Automata Optimal Scheduling Kim G. Larsen Aalborg University DENMARK

4 Overview Timed Automata Scheduling Priced Timed Automata Optimal Reachability Optimal Infinite Scheduling Multi Objectives Verification Optimization Synthesis Component CLASSIC CORA TIGA ECDAR Energy Automata Testing Performance Analysis Optimal Synthesis TRON SMC STRATEGO TU Graz, May 2017 Kim Larsen [4]

5 Real Time Scheduling Only 1 Pass Cheat is possible (drive close to car with Pass ) UNSAFE 5 10 Pass SAFE CAN The THEY Car & MAKE Bridge IT Problem TO SAFE WITHIN 70 MINUTES??? TU Graz, May 2017 Kim Larsen [5]

6 Let us play! TU Graz, May 2017 Kim Larsen [6]




7 Real Time Scheduling RIO12/DAY3/ Solve Scheduling Problem using UPPAAL UNSAFE 5 10 SAFE TU Graz, May 2017 Kim Larsen [7]
8 Resources & Tasks Resource Synchronization Task Shared variable TU Graz, May 2017 Kim Larsen [8]
 + 2ps P2 (slow) + 5ps D 5 * 6 + * 3ps * 7ps 5 10 15 20 25 P1 P2 2 3 5 6 1 4 TU Graz, May 2017 Kim Larsen [9]")
9 Task Graph Scheduling Example A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors 4 C 3 * 4 + P1 (fast) + 2ps P2 (slow) + 5ps D 5 * 6 + * 3ps * 7ps P1 P TU Graz, May 2017 Kim Larsen [9] time
10 Task Graph Scheduling Example A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors C 3 * 4 + P1 (fast) + 2ps P2 (slow) + 5ps D 5 * 6 + * 3ps * 7ps P1 P TU Graz, May 2017 Kim Larsen [10] time
11 Task Graph Scheduling Example A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors C 3 * 4 + P1 (fast) + 2ps P2 (slow) + 5ps D 5 * 6 + * 3ps * 7ps P1 P TU Graz, May 2017 Kim Larsen [11] time
 time + * 5ps 7ps 5 10 15 20 25 3 5 4 6 2 E<> (Task1.End and and Task6.")
12 Task Graph Scheduling Example A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors C D 3 5 * * P1 P P1 (fast) 3ps TU Graz, May 2017 RIO12/DAY3/taskgraph-AVACS2010 Kim Larsen [12] + * 2ps P2 (slow) time + * 5ps 7ps E<> (Task1.End and and Task6.End)

13 Experimental Results Symbolic A* Branch-&-Bound 60 sec Abdeddaïm, Kerbaa, Maler TU Graz, May 2017 Kim Larsen [13]
14 Priced Timed Automata
15 EXAMPLE: Optimal rescue plan for cars with different subscription rates for city driving! 5 Golf SAFE Citroen BMW Datsun 3 10 OPTIMAL PLAN HAS ACCUMULATED COST=195 and TOTAL TIME=65! TU Graz, May 2017 Kim Larsen [15]
16 Experiments COST-rates G C B D SCHEDULE COST TIME #Expl #Pop d Min Time CG> G< BD> C< CG> CG> G< BG> G< GD> GD> G< CG> G< BG> CG> G< BD> C< CG> CD> C< CB> C< CG> BD> B< CB> C< CG> time< TU Graz, May 2017 RIO12/DAY3/carcost Kim Larsen [16]
 + 5ps D 5 * 6 + ENERGY: * Idle In use 3ps 1oW Idle * In use 7ps 20W 5 10 15 90W 20 30W 25 P1 P2 1 3 5 4 6 2 TU Graz, May 2017 Kim Larsen [17] time")
17 Task Graph Scheduling Revisited A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors C 3 * 4 + P1 (fast) + 2ps P2 (slow) + 5ps D 5 * 6 + ENERGY: * Idle In use 3ps 1oW Idle * In use 7ps 20W W 20 30W 25 P1 P TU Graz, May 2017 Kim Larsen [17] time
18 Task Graph Scheduling Revisited A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors C 3 * 4 + P1 (fast) + 2ps P2 (slow) + 5ps D 5 * 6 + ENERGY: * Idle In use 3ps 10W * Idle In use 7ps 20W W 20 30W 25 P1 P TU Graz, May 2017 RIO12/DAY3/taskgraph-AVACS2010-cost Kim Larsen [18] time
19 Task Graph Scheduling Revisited A 1 B C D 2 + * Compute : (D * ( C * ( A + B )) + (( A + B ) + ( C * D )) using 2 processors C 3 * 4 + P1 (fast) + 2ps P2 (slow) + 5ps D 5 * 6 + ENERGY: * Idle In use 3ps 10W * Idle In use 7ps 20W W 20 30W 25 P1 P TU Graz, May 2017 Kim Larsen [19] time
20 A simple example TU Graz, May 2017 Kim Larsen [20]
21 A simple example Q: What is cheapest cost for reaching? TU Graz, May 2017 Kim Larsen [21]

![for PTA THM [Bouyer, Brojaue, Briuere, Raskin 07] Optimal](/docs-images/93/112638955/images/22-1.jpg "reachability is PSPACE-complete for PTA 3 0 3 0 0 0 0 0 TU")
22 Corner Point Regions THM [Behrmann, Fehnker..01] [Alur,Torre,Pappas 01] Optimal reachability is decidable for PTA THM [Bouyer, Brojaue, Briuere, Raskin 07] Optimal reachability is PSPACE-complete for PTA TU Graz, May 2017 Kim Larsen [22]
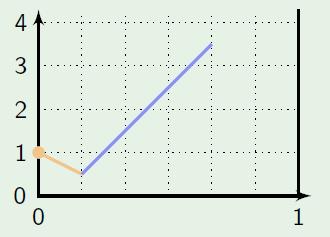
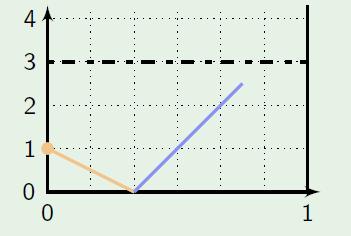
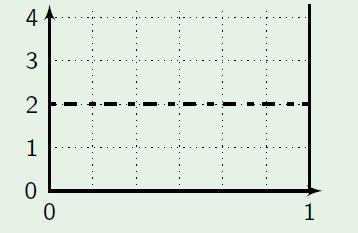
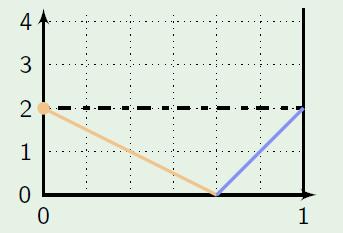
23 Priced Zones [CAV01] A zone Z: 1 x 2 Æ 0 y 2 Æ x - y 0 A cost function C C(x,y)= 2 x - 1 y + 3 TU Graz, May 2017 Kim Larsen [23]
![Priced Zones Reset [CAV01] Z[x=0]: x=0 Æ 0 y 2 A zone Z: 1 x 2 Æ 0 y 2 Æ x - y 0 C = 1 y](/docs-images/93/112638955/images/24-1.jpg "+ 3 C= -1 y + 5 A cost function C C(x,y) = 2 x - 1 y + 3 TU Graz, May 2017 Kim Larsen")
24 Priced Zones Reset [CAV01] Z[x=0]: x=0 Æ 0 y 2 A zone Z: 1 x 2 Æ 0 y 2 Æ x - y 0 C = 1 y + 3 C= -1 y + 5 A cost function C C(x,y) = 2 x - 1 y + 3 TU Graz, May 2017 Kim Larsen [24]




25 Symbolic Branch & Bound Algorithm Z' Z Z is bigger & cheaper than Z is a well-quasi ordering which guarantees termination! TU Graz, May 2017 Kim Larsen [25]
26 Example: Aircraft Landing cost e*(t-t) E d+l*(t-t) T L t E earliest landing time T target time L latest time e cost rate for being early l cost rate for being late d fixed cost for being late Planes have to keep separation distance to avoid turbulences caused by preceding planes TU Graz, May 2017 Kim Larsen [26] Runway

27 Example: Aircraft Landing x <= 5 x >= 4 x=5 land! cost+=2 x <= 5 x <= 9 cost =3 cost =1 x=5 land! 4 earliest landing time 5 target time 9 latest time 3 cost rate for being early 1 cost rate for being late 2 fixed cost for being late Planes have to keep separation distance to avoid turbulences caused by preceding planes TU Graz, May 2017 RIO12/DAY3/aircraft Kim Larsen [27] Runway

28 Aircraft Landing Source of examples: Baesley et al 2000 TU Graz, May 2017 Kim Larsen [28]
29 Symbolic Branch & Bound Algorithm Zone based Linear Programming Problems (dualize) Min Cost Flow TU Graz, May 2017 Kim Larsen [29]
30 Zone LP Min Cost Flow Exploiting duality minimize 3x 1-2x 2 +7 when x 1 -x x 2 3 x 2 1 minimize 3y 2,0 -y 0,2 +y 1,2 y 0,1 when y 2,0 -y 0,1 -y 0,2 =1 y 0,2 +y 1,2 =2 y 0,1 -y 1,2 =-3 TU Graz, May 2017 Kim Larsen [30]
31 Zone LP Min Cost Flow Exploiting duality minimize 3x 1-2x 2 +7 when x 1 -x x 2 3 x 2 1 minimize 3y 2,0 -y 0,2 +y 1,2 y 0,1 when y 2,0 -y 0,1 -y 0,2 =1 y 0,2 +y 1,2 =2 y 0,1 -y 1,2 =-3 TU Graz, May 2017 Kim Larsen [31]

32 Aircraft Landing (revisited) Using MCF/Netsimplex [TACAS04] TU Graz, May 2017 Kim Larsen [32]

33 NOT IMPLEMENTED w ZONES TU Graz, May 2017 Kim Larsen [33]
34 Optimal Infinite Schedule TU Graz, May 2017 Kim Larsen [34]
35 Informationsteknologi EXAMPLE: Optimal WORK plan for cars with different subscription rates for city driving! 5 Golf Citroen maximal 100 min. at each location BMW Datsun 3 10 UCb
36 Informationsteknologi Workplan I Golf U Citroen U e(25) Golf U Citroen U e(25) Golf U Citroen U BMW U Datsun U BMW S Datsun S BMW U Datsun U e(25) 300 Golf S Citroen U e(20) Golf U Citroen U e(25) Golf U Citroen S BMW S Datsun U 300 BMW U Datsun U 300 BMW U Datsun S e(20) 300 e(25) 300 Golf U BMW U Citroen U Datsun U e(25) 300 Golf U BMW U Citroen S Datsun S Value of workplan: (4 x 300) / 90 = UCb
37 Informationsteknologi Workplan II Golf Citroen 25/125 Golf Citroen Golf Citroen 5/25 20/180 Golf Citroen BMW Datsun BMW Datsun BMW Datsun BMW Datsun 10/90 Golf Citroen 10/130 Golf Citroen 25/125 Golf Citroen 5/10 Golf Citroen BMW Datsun BMW Datsun BMW Datsun BMW Datsun 5/65 Golf BMW Citroen Datsun 25/225 Golf BMW Citroen Datsun Golf Citroen 10/90 10/0 BMW Datsun Golf BMW Citroen Datsun Value of workplan: 25/50 Golf Citroen 5/10 Golf 10/0 Citroen BMW Datsun BMW Datsun UCb 560 / 100 = 5.6


38 Optimal Infinite Scheduling Maximize throughput: i.e. maximize Reward / Time in the long run! TU Graz, May 2017 Kim Larsen [38]
39 Optimal Infinite Scheduling Minimize Energy Consumption: i.e. minimize Cost / Time in the long run TU Graz, May 2017 Kim Larsen [39]


40 Optimal Infinite Scheduling Maximize throughput: i.e. maximize Reward / Cost in the long run TU Graz, May 2017 Kim Larsen [40]

")
")
41 Mean Pay-Off Optimality Bouyer, Brinksma, Larsen: HSCC04,FMSD07 Accumulated cost s c 1 c 2 c 3 c n r 1 r 2 r 3 r n : BAD Accumulated reward Value of path s: val(s) = lim n!1 c n /r n Optimal Schedule s * : val(s * ) = inf s val(s) TU Graz, May 2017 Kim Larsen [41]
 c(t 2) c(t 3) c(t n ) t 1 t")
 = inf s val(s) TU Graz, May 2017 Kim")
42 Discount Optimality < 1 : discounting factor Larsen, Fahrenberg: INFINITY 08 Cost of time t n s c(t 1 ) c(t 2) c(t 3) c(t n ) t 1 t 2 t 3 t n : BAD Time of step n Value of path s: val(s) = Optimal Schedule s * : val(s * ) = inf s val(s) TU Graz, May 2017 Kim Larsen [42]


43 Soundness of Corner Point Abstraction TU Graz, May 2017 Kim Larsen [43]


44 Optimal Conditional Reachability with Jacob I. Rasmussen
45 Informationsteknologi EXAMPLE: Optimal rescue plan for cars with different subscription rates for city driving! UNSAFE 5 Golf SAFE Citroen BMW 3 10 My CAR! Minimizes Cost MYCAR subject to Cost Citroen 60 Datsun Cost BMW 90 Cost Datsun 10 UCb min Cost MYCAR = 270 time = 70


46 Informationsteknologi UCb Optimal Conditional Reachability Dual-priced TA l l 1 2 x 2 l 3 d+=1 y 1 c = 1 d = 4 x 2 y:=0 c = 2 d = 1 x 3 y 2 y:=0 PROBLEM: Reach l 3 in a way which minimizes c subject to d 4 SOLUTION: c = 11/3 wait 1/3 in l 1 ; goto l 2 ; wait 5/3 in l 2 ; goto l 3
47 Informationsteknologi Discrete Trajectories l 1,0,0 0,1 l l 2 1 x 2 l3 y 1 d+=1 c = 1 d = 4 x 2 y:=0 c = 2 d = 1 x 3 y 2 l 2,0,0 l 2,1,0 l 2,2,0 y:=0 1,4 l 1,1,1 0,1 l 2,1,1 2,1 2,1 l 2,2,1 l 2,3,1 2,1 1,4 2,1 0,1 l 1,2,2 l 2,2,2 2,1 l 2,3,2 0,0 0,0 0,0 UCb 0,0
48 Informationsteknologi Discrete Trajectories l 1,0,0 0,1 l l 2 1 x 2 l3 y 1 d+=1 c = 1 d = 4 x 2 y:=0 c = 2 d = 1 x 3 y 2 l 2,0,0 l 2,1,0 l 2,2,0 y:=0 1,4 l 1,1,1 0,1 l 2,1,1 2,1 2,1 l 2,2,1 l 2,3,1 2,1 1,4 2,1 0,1 l 1,2,2 l 2,2,2 2,1 l 2,3,2 d 10 0,0 0,0 8 6 UCb 0,0 4 0, c
49 Informationsteknologi UCb Dual Priced Zones
50 Informationsteknologi UCb Dual Priced Zones
51 Informationsteknologi UCb Dual Priced Zones
52 Informationsteknologi UCb Reset
53 Informationsteknologi UCb Reset
54 Informationsteknologi UCb Reset
55 Informationsteknologi UCb Reset
56 Informationsteknologi UCb Exploration l l 2 1 x 2 l3 y 1 d+=1 c = 1 d = 4 y:=0 c = 2 d = 1 y:=0 x 2 x 3 y 2
57 Informationsteknologi UCb Exploration l l 2 1 x 2 l3 y 1 d+=1 c = 1 d = 4 y:=0 c = 2 d = 1 y:=0 x 2 x 3 y 2
58 Informationsteknologi UCb Exploration l l 2 1 x 2 l3 y 1 d+=1 c = 1 d = 4 y:=0 c = 2 d = 1 y:=0 x 2 x 3 y 2

59 Informationsteknologi UCb Termination


60 Multiple Objective Scheduling 16,10 P 2 P 1 2,3 2,3 cost 1 ==4 cost 2 ==3 cost 2 6,6 10,16 P 6 P 3 P 4 Pareto Frontier P 7 P 5 2,2 8,2 4W 3W cost 1 TU Graz, May 2017 Kim Larsen [60]
61 Applications

62 Experimental Results TU Graz, May 2017 Kim Larsen [62]


63 Experimental Results COP15 TU Graz, May 2017 Kim Larsen [63]

.")
64 Informationsteknologi Informationsteknologi Informationsteknologi Informationsteknologi SIDMAR Production (2002) VHS UCb Steel Production Plant A. Fehnker, T. Hune, K. G. Larsen, P. Pettersson Case study of Esprit-LTR project VHS Physical plant of SIDMAR located in Gent, Belgium. Part between blast furnace and hot rolling mill. Objective: model the plant, obtain schedule and control program for plant. Crane A Machine 1 Machine 2 Machine 3 Machine 4 Machine 5 Crane B Lane 2 Buffer Storage Place Continuos Casting Machine Lane 1 UCb Steel Production Plant Input: sequence of steel loads ( pigs ). Load follows Recipe to obtain certain quality, e.g: start; T1@10; T2@20; T3@10; T2@10; end within 120. Crane A Machine 1 Machine 2 Machine 2 2 Machine 4 Machine 5 =127 Crane B Output: sequence of higher quality steel Controller Synthesis for LEGO 2 Lane 2 Buffer Storage Continuos Casting Machine Lane 1 A single load (part of) Crane B LEGO RCX Mindstorms. Local controllers with control programs. IR protocol for remote invocation of programs. Central controller. TU Graz, May 2017 UPPAAL Kim Larsen [64] UCb UCb crane a m1 m2 m3 m4 buffer storage casting 1971 lines of RCX code (n=5), (n=60). m5 crane b central controller Synthesis
 orders: start time, due date, recipe extensions: delay cost, storage cost, setup cost weekend, nights")
![Behrmann, Brinksma, Hendriks, Mader 16 th IFAC World Congress UCb Results Extended Case TU Graz, May 2017 Kim Larsen [65] UCb #jobs work max. min.](/docs-images/93/112638955/images/65-2.jpg "cost heuristic orders hrs found in 60 s Orders of magnitude 29 - es, no, nl -faster than 530,771 29 Competitive - es, no, g MILP, GAMS/CPLEX - 647,410 with 29 avail.")
65 Informationsteknologi Informationsteknologi Informationsteknologi AXXOM Case Study (2005) ARTEMIS AXXOM Case study Laquer Production Scheduling Recipes UPPAAL template for metal UCb 3 types of recipes for uni/metallic/bronce use of resources, processing times, timing 29 (73, 219) orders: start time, due date, recipe extensions: delay cost, storage cost, setup cost weekend, nights Behrmann, Brinksma, Hendriks, Mader 16 th IFAC World Congress UCb Results Extended Case TU Graz, May 2017 Kim Larsen [65] UCb #jobs work max. min. cost heuristic orders hrs found in 60 s Orders of magnitude 29 - es, no, nl -faster than 530, Competitive - es, no, g MILP, GAMS/CPLEX - 647,410 with 29 avail. Orion-pies, no, nl - 1,714,875 results 29 avail. es, no, g - 2,263, expl. no 4 192,881,129



66 Océ Datapath, 2012 Tilt-Tray Sorters Scheduling rules & Optimization, 2008 ASML, 2004: Wafer Scanners Optimization of Throughput Philips: Indoor Lighting systems, 2014 TU Graz, May 2017 Kim Larsen [66]
 But also")






67 TU Graz, May 2017 NANO Satellites (2015) NanoSatellites Nanosatellite: 1 20 kg Smaller Cheaper Faster Nano/Microsatellite Launch History and Projection (1-50 kg) But also capable! Projections based on announced and future plans of developers and programs indicate between 2,000 and 2,750 nano/microsatellites will require a launch from 2014 through 2020 w Morten Bisgaard, GOMSPACE Holger Hermanns, Gilles Nies, Marvin Stenger, Saarbrücken 600 Number of Satellites (1-50 kg) Full Market Potential SpaceWorks Projection Historical Launches GomSpace Satellites Calendar Year The Full Market Potential dataset is a combination of publically announced launch intentions, market research, and qualitative/quantitative assessments to account for future activities and programs. The SpaceWorks Projection dataset reflects SpaceWorks expert value judgment on the likely market outcome. SENSATION, Review Meeting, April 11, 2016 * Please see End Notes 1, 2, 4, 5, and U satellite -> 2013 Tracking airplanes Simple mission 3U satellite -> major payloads Complex mission SENSATION, Review Meeting, April 11,
68 ay 2017 GOMX-3 Deployment

69 Scheduling Approach Planning GOMX-3 Behaviour 69 TU Graz, May 2017

70 ay 2017 Derived Schedule

71 ay 2017

72 Energy Automata

73 Managing Resources TU Graz, May 2017 Kim Larsen [73]
74 Consuming & Harvesting Energy Maximize throughput while respecting: 0 E MAX TU Graz, May 2017 Kim Larsen [74]









75 Energy Constrains Energy is not only consumed but may also be regained The aim is to continously satisfy some energy constriants TU Graz, May 2017 Kim Larsen [75]

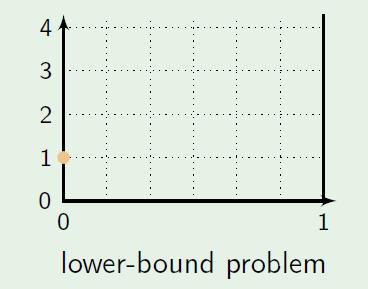
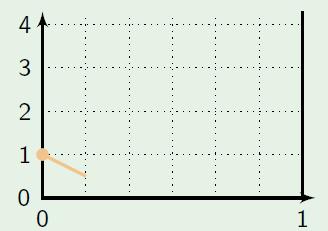
76 One Weight Results undecidable decidable (flat) decidable decidable decidable decidable undecidable undecidable undecidable undecidable PSPACE-c PSPACE-c P Bouyer, U Fahrenberg, K Larsen, N Markey,... Infinite runs in weighted timed automata with energy constraints P. Bouyer, U. Fahrenberg, K. G. Larsen, N. Markey: Timed automata with observers under energy constraints. HSCC 2010 P. Bouyer, K. G. Larsen, and N. Markey. Lower-bound constrained runs in weighted timed automata. QEST 2012 TU Graz, May 2017 Kim Larsen [76]
77 L-Problem for 1-Clock Case Theorem: The L-problem is decidable in PTIME for 1-clock PTAs P Bouyer, U Fahrenberg, K Larsen, N Markey,... Infinite runs in weighted timed automata with energy constraints TU Graz, May 2017 Kim Larsen [77]
78 1½ Clocks = Discrete Updates TU Graz, May 2017 Kim Larsen [80]

79 New Approach: Energy Functions Maximize energy along paths Use this information to solve general problem P. Bouyer, U. Fahrenberg, K. G. Larsen, N. Markey: Timed automata with observers under energy constraints. HSCC 2010 TU Graz, May 2017 Kim Larsen [81]
80 Energy Function General Strategy Spend just enough time to survive the next negative update P. Bouyer, U. Fahrenberg, K. G. Larsen, N. Markey: Timed automata with observers under energy constraints. HSCC 2010 TU Graz, May 2017 Kim Larsen [82]

81 Exponential PTA General Strategy Spend just enough time to survive the next negative update so that after next negative update there is a certain positive amount! Minimal Fixpoint: P. Bouyer, U. Fahrenberg, K. G. Larsen, N. Markey: Timed automata with observers under energy constraints. HSCC 2010 TU Graz, May 2017 Kim Larsen [83]
![Exponential PTA Thm [BFLM09]: The L-problem is decidable for linear and](/docs-images/93/112638955/images/82-3.jpg "exponential 1-clock PTAs with negative discrete updates.")

82 Exponential PTA Thm [BFLM09]: The L-problem is decidable for linear and exponential 1-clock PTAs with negative discrete updates. Energy Function P. Bouyer, U. Fahrenberg, K. G. Larsen, N. Markey: Timed automata with observers under energy constraints. HSCC 2010 TU Graz, May 2017 Kim Larsen [84]
83 Multiple Costs & Clocks LU Problem Undecidable 2 clocks + 2 costs [1] 1 clock + 2 costs [2] 2 clocks + 1 cost [3] Update Test-Decrement c 1 Increment n=3 Decrement n=12 (1) Karin Quaas. On the interval-bound problem for weighted timed automata (2) Uli Fahrenberg, Line Juhl, Kim G. Larsen, and Jirı Srba. Energy games in multiweighted automata (3) Nicolas Markey. Verification of Embedded Systems Algorithms and Complexity TU Graz, May 2017 Kim Larsen [85]

84 Multiple Clocks & 1 Cost L problem is undecidable 4 clocks or more x=x 0 C=C 0 x=x 0 C=x 0 +C 0 x=x 0 C=C 0 x=x 0 C=(1-x 0 ) +C 0 P. Bouyer, K. G. Larsen, and N. Markey. Lower-bound constrained runs in weighted timed automata. QEST 2012 TU Graz, May 2017 Kim Larsen [86]
85 Upper Bounds LU Problem Undecidable 2 clocks + 2 costs [1] 1 clock + 2 costs [2] 2 clocks + 1 cost [3] Update c 1 Increment n=3 Decrement n=12 (1) Karin Quaas. On the interval-bound problem for weighted timed automata (2) Uli Fahrenberg, Line Juhl, Kim G. Larsen, and Jirı Srba. Energy games in multiweighted automata (3) Nicolas Markey. Verification of Embedded Systems Algorithms and Complexity TU Graz, May 2017 Kim Larsen [87]
86 Multiple Costs & 0 Clocks Uli Fahrenberg, Line Juhl, Kim G. Larsen, and Jirı Srba. Energy games in multiweighted automata TU Graz, May 2017 Kim Larsen [88]

87 Multiple Costs & 0 Clocks Uli Fahrenberg, Line Juhl, Kim G. Larsen, and Jirı Srba. Energy games in multiweighted automata TU Graz, May 2017 Kim Larsen [89]
88 Conclusion Priced Timed Automata a uniform framework for modeling and solving dynamic ressource allocation problems! Not mentioned here: Model Checking Issues (ext. of CTL and LTL). Future work: Zone-based algorithm for optimal infinite runs. Approximate solutions for priced timed games to circumvent undecidablity issues. Open problems for Energy Automata. Approximate algorithms for optimal reachability TU Graz, May 2017 Kim Larsen [90]
Priced Timed Automata and Timed Games. Kim G. Larsen Aalborg University, DENMARK
 Priced Timed Automata and Timed Games Kim G. Larsen Aalborg University, DENMARK Scheduling Priced Timed Automata and Synthesis Timed Games Kim G. Larsen Aalborg University, DENMARK Overview Timed Automata
Priced Timed Automata and Timed Games Kim G. Larsen Aalborg University, DENMARK Scheduling Priced Timed Automata and Synthesis Timed Games Kim G. Larsen Aalborg University, DENMARK Overview Timed Automata
UPPAAL Tutorial. UPPAAL Family
 UPPAAL Tutorial Beyond UPPAAL Alexandre David Paul Pettersson RTSS 05 Classic : real-time verification Cora: real-time scheduling Tron: online real-time testing Tiga: timed game Times: schedulability analysis
UPPAAL Tutorial Beyond UPPAAL Alexandre David Paul Pettersson RTSS 05 Classic : real-time verification Cora: real-time scheduling Tron: online real-time testing Tiga: timed game Times: schedulability analysis
Quantitative. Kim G. Larsen DENMARK
 Quantitative Verification i and Synthesis, of Embedded Systemss Kim G. Larsen CISS Aalborg University DENMARK Embedded Systems sensors Plant Controller Program Continuous actuators Discrete Eg.: Realtime
Quantitative Verification i and Synthesis, of Embedded Systemss Kim G. Larsen CISS Aalborg University DENMARK Embedded Systems sensors Plant Controller Program Continuous actuators Discrete Eg.: Realtime
Quantitative analysis of real-time systems
 Quantitative analysis of real-time systems Patricia Bouyer bouyer@lsv.ens-cachan.fr Kim G. Larsen kgl@cs.aau.dk LSV CNRS & ENS Cachan 6 avenue du Président Wilson 9 Cachan France Uli Fahrenberg uli@cs.aau.dk
Quantitative analysis of real-time systems Patricia Bouyer bouyer@lsv.ens-cachan.fr Kim G. Larsen kgl@cs.aau.dk LSV CNRS & ENS Cachan 6 avenue du Président Wilson 9 Cachan France Uli Fahrenberg uli@cs.aau.dk
Towards Compositional Testing of Real-Time Systems
 Towards Compositional Testing of Real-Time Systems Kim G Larsen, Axel Legay, Marius Mikucionis, Brian Nielsen, Ulrik Nyman Aalborg University, DENMARK Compositional Testing Integration of fully conformant
Towards Compositional Testing of Real-Time Systems Kim G Larsen, Axel Legay, Marius Mikucionis, Brian Nielsen, Ulrik Nyman Aalborg University, DENMARK Compositional Testing Integration of fully conformant
Verification in Continuous Time Recent Advances
 Verification in Continuous Time Recent Advances Hongyang Qu Department of Automatic Control and Systems Engineering University of Sheffield 10 March 2017 Outline Motivation Probabilistic models Real-time
Verification in Continuous Time Recent Advances Hongyang Qu Department of Automatic Control and Systems Engineering University of Sheffield 10 March 2017 Outline Motivation Probabilistic models Real-time
Timed Automata From Theory to Implementation
 Timed Automata From Theory to Implementation Patricia Bouyer LSV CNRS & ENS de Cachan France Chennai january 2003 Timed Automata From Theory to Implementation p.1 Roadmap Timed automata, decidability issues
Timed Automata From Theory to Implementation Patricia Bouyer LSV CNRS & ENS de Cachan France Chennai january 2003 Timed Automata From Theory to Implementation p.1 Roadmap Timed automata, decidability issues
SCHEDULING LACQUER PRODUCTION BY REACHABILITY ANALYSIS - A CASE STUDY 1
 SCHEDULING LACQUER PRODUCTION BY REACHABILITY ANALYSIS - A CASE STUDY 1 Gerd Behrmann Ed Brinksma Martijn Hendriks Angelika Mader Aalborg University, Denmark University of Twente, The Netherlands University
SCHEDULING LACQUER PRODUCTION BY REACHABILITY ANALYSIS - A CASE STUDY 1 Gerd Behrmann Ed Brinksma Martijn Hendriks Angelika Mader Aalborg University, Denmark University of Twente, The Netherlands University
Efficient Synthesis of Production Schedules by Optimization of Timed Automata
 Efficient Synthesis of Production Schedules by Optimization of Timed Automata Inga Krause Institute of Automatic Control Engineering Technische Universität München inga.krause@mytum.de Joint Advanced Student
Efficient Synthesis of Production Schedules by Optimization of Timed Automata Inga Krause Institute of Automatic Control Engineering Technische Universität München inga.krause@mytum.de Joint Advanced Student
Uppaal Stratego. Alexandre David Peter Gjøl Jensen Kim Guldstrand Larsen Marius Mikucionis Jakob Haahr Taankvist
 Uppaal Stratego Alexandre David Peter Gjøl Jensen Kim Guldstrand Larsen Marius Mikucionis Jakob Haahr Taankvist Department of Computer Science, Aalborg University, Selma Lagerlöfs Vej 300, 9220 Aalborg
Uppaal Stratego Alexandre David Peter Gjøl Jensen Kim Guldstrand Larsen Marius Mikucionis Jakob Haahr Taankvist Department of Computer Science, Aalborg University, Selma Lagerlöfs Vej 300, 9220 Aalborg
Model-based GUI testing using Uppaal at NOVO Nordisk
 Model-based GUI testing using Uppaal at NOVO Nordisk Ulrik H. Hjort 2, Jacob Illum 1, Kim G. Larsen 1, Michael A. Petersen 2, and Arne Skou 1 1 Department of Computer Science, Aalborg University, Denmark
Model-based GUI testing using Uppaal at NOVO Nordisk Ulrik H. Hjort 2, Jacob Illum 1, Kim G. Larsen 1, Michael A. Petersen 2, and Arne Skou 1 1 Department of Computer Science, Aalborg University, Denmark
Guided Synthesis of Control Programs Using UPPAAL
 Guided Synthesis of Control Programs Using UPPAAL Thomas Hune BRICS, Department of Computer Science Aarhus University Ny Munkegade, Building 540 DK-8000 Aarhus C, Denmark E-mail: baris@brics.dk Kim G.
Guided Synthesis of Control Programs Using UPPAAL Thomas Hune BRICS, Department of Computer Science Aarhus University Ny Munkegade, Building 540 DK-8000 Aarhus C, Denmark E-mail: baris@brics.dk Kim G.
Editor. Analyser XML. Scheduler. generator. Code Generator Code. Scheduler. Analyser. Simulator. Controller Synthesizer.
 TIMES - A Tool for Modelling and Implementation of Embedded Systems Tobias Amnell, Elena Fersman, Leonid Mokrushin, Paul Pettersson, and Wang Yi? Uppsala University, Sweden Abstract. Times is a new modelling,
TIMES - A Tool for Modelling and Implementation of Embedded Systems Tobias Amnell, Elena Fersman, Leonid Mokrushin, Paul Pettersson, and Wang Yi? Uppsala University, Sweden Abstract. Times is a new modelling,
Overview. Leader Election Protocol. Dynamic Voltage Scaling. Optimal Reconfiguration of FPGA. Memory Interface. UCb
 APPLICATIONS UC b Overview Leader Election Protocol Dynamic Voltage Scaling Optimal Reconfiguration of FPGA Memory Interface Leader Election Protocol UC b Leader Election 2 1 0 3 Protocol by Leslie Lamport
APPLICATIONS UC b Overview Leader Election Protocol Dynamic Voltage Scaling Optimal Reconfiguration of FPGA Memory Interface Leader Election Protocol UC b Leader Election 2 1 0 3 Protocol by Leslie Lamport
To Store or Not To Store
 To Store or Not To Store Radek Pelánek Masaryk University, Brno Gerd Behrmann, Kim G. Larsen Aalborg University To Store or Not To Store p.1/24 Reachability Problem Model: networks of timed automata with
To Store or Not To Store Radek Pelánek Masaryk University, Brno Gerd Behrmann, Kim G. Larsen Aalborg University To Store or Not To Store p.1/24 Reachability Problem Model: networks of timed automata with
TIMES A Tool for Modelling and Implementation of Embedded Systems
 TIMES A Tool for Modelling and Implementation of Embedded Systems Tobias Amnell, Elena Fersman, Leonid Mokrushin, Paul Pettersson, and Wang Yi Uppsala University, Sweden. {tobiasa,elenaf,leom,paupet,yi}@docs.uu.se.
TIMES A Tool for Modelling and Implementation of Embedded Systems Tobias Amnell, Elena Fersman, Leonid Mokrushin, Paul Pettersson, and Wang Yi Uppsala University, Sweden. {tobiasa,elenaf,leom,paupet,yi}@docs.uu.se.
Statistical Model Checking in UPPAAL
 Statistical Model Checking in UPPAAL Alexandre David, Kim G. Larsen, Marius Mikucionis Axel Legay, Wang Zheng, Peter Bulychev, Jonas van Vliet, Danny Poulsen, Dehui Du, Guangyuan Li CAV 11, PDMC 11,FORMATS
Statistical Model Checking in UPPAAL Alexandre David, Kim G. Larsen, Marius Mikucionis Axel Legay, Wang Zheng, Peter Bulychev, Jonas van Vliet, Danny Poulsen, Dehui Du, Guangyuan Li CAV 11, PDMC 11,FORMATS
Formal Methods in CPS
 Formal Methods in CPS A Computer Science Perspective Kim G. Larsen Aalborg University, DENMARK From Timed Automata to Stochastic Hybrid Games Model Checking, Performance Evaluation and Synthesis Kim G.
Formal Methods in CPS A Computer Science Perspective Kim G. Larsen Aalborg University, DENMARK From Timed Automata to Stochastic Hybrid Games Model Checking, Performance Evaluation and Synthesis Kim G.
Symbolic and Statistical Model Checking in UPPAAL
 Symbolic and Statistical Model Checking in UPPAAL Alexandre David Kim G. Larsen Marius Mikucionis, Peter Bulychev, Axel Legay, Dehui Du, Guangyuan Li, Danny B. Poulsen, Amélie Stainer, Zheng Wang CAV11,
Symbolic and Statistical Model Checking in UPPAAL Alexandre David Kim G. Larsen Marius Mikucionis, Peter Bulychev, Axel Legay, Dehui Du, Guangyuan Li, Danny B. Poulsen, Amélie Stainer, Zheng Wang CAV11,
Statistical Model Checking in UPPAAL
 Statistical Model Checking in UPPAAL Alexandre David, Kim G. Larsen, Axel Legay, Marius Mikucionis Wang Zheng, Peter Bulychev, Jonas van Vliet, Danny Poulsen, Dehui Du, Guangyuan Li CAV 11, PDMC 11,FORMATS
Statistical Model Checking in UPPAAL Alexandre David, Kim G. Larsen, Axel Legay, Marius Mikucionis Wang Zheng, Peter Bulychev, Jonas van Vliet, Danny Poulsen, Dehui Du, Guangyuan Li CAV 11, PDMC 11,FORMATS
Beyond Model Checking: Parameters Everywhere
 Beyond Model Checking: Parameters Everywhere Étienne André 1, Benoît Delahaye 2, Peter Habermehl 3, Claude Jard 2, Didier Lime 4, Laure Petrucci 1, Olivier H. Roux 4, Tayssir Touili 3 1 Université Paris
Beyond Model Checking: Parameters Everywhere Étienne André 1, Benoît Delahaye 2, Peter Habermehl 3, Claude Jard 2, Didier Lime 4, Laure Petrucci 1, Olivier H. Roux 4, Tayssir Touili 3 1 Université Paris
Automatic synthesis of switching controllers for linear hybrid systems: Reachability control
 Automatic synthesis of switching controllers for linear hybrid systems: Reachability control Massimo Benerecetti and Marco Faella Università di Napoli Federico II, Italy Abstract. We consider the problem
Automatic synthesis of switching controllers for linear hybrid systems: Reachability control Massimo Benerecetti and Marco Faella Università di Napoli Federico II, Italy Abstract. We consider the problem
Basic Research in Computer Science BRICS RS Hune et al.: Guided Synthesis of Control Programs for a Batch Plant using UPPAAL
 BRICS Basic Research in Computer Science BRICS RS-00-37 Hune et al.: Guided Synthesis of Control Programs for a Batch Plant using UPPAAL Guided Synthesis of Control Programs for a Batch Plant using UPPAAL
BRICS Basic Research in Computer Science BRICS RS-00-37 Hune et al.: Guided Synthesis of Control Programs for a Batch Plant using UPPAAL Guided Synthesis of Control Programs for a Batch Plant using UPPAAL
A Case Study on Earliness/Tardiness Scheduling by Constraint Programming
 A Case Study on Earliness/Tardiness Scheduling by Constraint Programming Jan Kelbel, Zdeněk Hanzálek Department of Control Engineering, Faculty of Electrical Engineering Czech Technical University in Prague
A Case Study on Earliness/Tardiness Scheduling by Constraint Programming Jan Kelbel, Zdeněk Hanzálek Department of Control Engineering, Faculty of Electrical Engineering Czech Technical University in Prague
Model Checking for Hybrid Systems
 Model Checking for Hybrid Systems Bruce H. Krogh Carnegie Mellon University Hybrid Dynamic Systems Models Dynamic systems with both continuous & discrete state variables Continuous-State Systems differential
Model Checking for Hybrid Systems Bruce H. Krogh Carnegie Mellon University Hybrid Dynamic Systems Models Dynamic systems with both continuous & discrete state variables Continuous-State Systems differential
Reachability of Hybrid Systems using Support Functions over Continuous Time
 Reachability of Hybrid Systems using Support Functions over Continuous Time Goran Frehse, Alexandre Donzé, Scott Cotton, Rajarshi Ray, Olivier Lebeltel, Rajat Kateja, Manish Goyal, Rodolfo Ripado, Thao
Reachability of Hybrid Systems using Support Functions over Continuous Time Goran Frehse, Alexandre Donzé, Scott Cotton, Rajarshi Ray, Olivier Lebeltel, Rajat Kateja, Manish Goyal, Rodolfo Ripado, Thao
Further Topics in Modelling & Verification
 Further Topics in Modelling & Verification Thursday Oct 09, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Recap: Timed automata (TA) 2/34 Recap: Properties 3/34 Questions about TA
Further Topics in Modelling & Verification Thursday Oct 09, 2014 Philipp Rümmer Uppsala University Philipp.Ruemmer@it.uu.se 1/34 Recap: Timed automata (TA) 2/34 Recap: Properties 3/34 Questions about TA
Real-Time Model Checking on Secondary Storage
 Real-Time Model Checking on Secondary Storage Stefan Edelkamp and Shahid Jabbar University of Dortmund Otto-Hahn Straße 14 Germany {stefan.edelkamp,shahid.jabbar}@cs.uni-dortmund.de Abstract. In this paper,
Real-Time Model Checking on Secondary Storage Stefan Edelkamp and Shahid Jabbar University of Dortmund Otto-Hahn Straße 14 Germany {stefan.edelkamp,shahid.jabbar}@cs.uni-dortmund.de Abstract. In this paper,
Model checking embedded system designs
 Model checking embedded system designs Ed Brinksma and Angelika Mader Faculty of Computer Science, University of Twente {brinksma,mader}@cs.utwente.nl 1 Introduction Extended abstract 1 Model checking
Model checking embedded system designs Ed Brinksma and Angelika Mader Faculty of Computer Science, University of Twente {brinksma,mader}@cs.utwente.nl 1 Introduction Extended abstract 1 Model checking
Real Time Software PROBLEM SETTING. Real Time Systems. Real Time Systems. Who is Who in Timed Systems. Real Time Systems
 Schedulability Analysis of Timed Systems with contributions from PROBLEM SETTING Tobias Amnell, Elena Fersma, John Håkansson, Pavel Kracal, Leonid Mokrushine, Christer Nordström, Paul Pettersson and Anders
Schedulability Analysis of Timed Systems with contributions from PROBLEM SETTING Tobias Amnell, Elena Fersma, John Håkansson, Pavel Kracal, Leonid Mokrushine, Christer Nordström, Paul Pettersson and Anders
TAPAS. Tests and Proofs and Synthesis. Kim G Larsen Aalborg University, DENMARK
 TAPAS Tests and Proofs and Synthesis Kim G Larsen Aalborg University, DENMARK TAPAS From Testing and Verification to Performance Analysis and Synthesis of Cyber-Physical Systems Kim G Larsen Aalborg University,
TAPAS Tests and Proofs and Synthesis Kim G Larsen Aalborg University, DENMARK TAPAS From Testing and Verification to Performance Analysis and Synthesis of Cyber-Physical Systems Kim G Larsen Aalborg University,
COMP 763. Eugene Syriani. Ph.D. Student in the Modelling, Simulation and Design Lab School of Computer Science. McGill University
 Eugene Syriani Ph.D. Student in the Modelling, Simulation and Design Lab School of Computer Science McGill University 1 OVERVIEW In the context In Theory: Timed Automata The language: Definitions and Semantics
Eugene Syriani Ph.D. Student in the Modelling, Simulation and Design Lab School of Computer Science McGill University 1 OVERVIEW In the context In Theory: Timed Automata The language: Definitions and Semantics
Real-Time Model Checking on Secondary Storage
 Real-Time Model Checking on Secondary Storage Stefan Edelkamp and Shahid Jabbar University of Dortmund Otto-Hahn Straße 14 Germany {stefan.edelkamp,shahid.jabbar}@cs.uni-dortmund.de Abstract. In this paper,
Real-Time Model Checking on Secondary Storage Stefan Edelkamp and Shahid Jabbar University of Dortmund Otto-Hahn Straße 14 Germany {stefan.edelkamp,shahid.jabbar}@cs.uni-dortmund.de Abstract. In this paper,
Kim Guldstrand Larsen
 Validation, Synthesis and Performance Evaluation of Embedded Systems using UPPAAL Kim Guldstrand Larsen Timed Automata UPPAAL (1995- ) @AALborg Kim G Larsen Alexandre David Gerd Behrman Marius Mikucionis
Validation, Synthesis and Performance Evaluation of Embedded Systems using UPPAAL Kim Guldstrand Larsen Timed Automata UPPAAL (1995- ) @AALborg Kim G Larsen Alexandre David Gerd Behrman Marius Mikucionis
Bounded Model Checking with Parametric Data Structures
 Bounded Model Checking with Marc Herbstritt (joint work with Erika Ábrahám, Bernd Becker, Martin Steffen) www.avacs.org August 15 2006 4th International Workshop on Bounded Model Checking Context Automated
Bounded Model Checking with Marc Herbstritt (joint work with Erika Ábrahám, Bernd Becker, Martin Steffen) www.avacs.org August 15 2006 4th International Workshop on Bounded Model Checking Context Automated
Using Hybrid Automata for Early Spacecraft Design Evaluation
 Seminar Operating Systems: Winter Semester 18/19 Using Hybrid Automata for Early Spacecraft Design Evaluation Jafar Akhundov Motivation Motivation: Spacecraft Modelling Gaia - mission to chart a 3d-map
Seminar Operating Systems: Winter Semester 18/19 Using Hybrid Automata for Early Spacecraft Design Evaluation Jafar Akhundov Motivation Motivation: Spacecraft Modelling Gaia - mission to chart a 3d-map
PRISM An overview. automatic verification of systems with stochastic behaviour e.g. due to unreliability, uncertainty, randomisation,
 PRISM An overview PRISM is a probabilistic model checker automatic verification of systems with stochastic behaviour e.g. due to unreliability, uncertainty, randomisation, Construction/analysis of probabilistic
PRISM An overview PRISM is a probabilistic model checker automatic verification of systems with stochastic behaviour e.g. due to unreliability, uncertainty, randomisation, Construction/analysis of probabilistic
PRISM 4.0: Verification of Probabilistic Real-Time Systems
 PRISM 4.0: Verification of Probabilistic Real-Time Systems Marta Kwiatkowska 1,GethinNorman 2,andDavidParker 1 1 Department of Computer Science, University of Oxford, Oxford, OX1 3QD, UK 2 School of Computing
PRISM 4.0: Verification of Probabilistic Real-Time Systems Marta Kwiatkowska 1,GethinNorman 2,andDavidParker 1 1 Department of Computer Science, University of Oxford, Oxford, OX1 3QD, UK 2 School of Computing
RT-Studio: A tool for modular design and analysis of realtime systems using Interpreted Time Petri Nets
 RT-Studio: A tool for modular design and analysis of realtime systems using Interpreted Time Petri Nets Rachid Hadjidj and Hanifa Boucheneb Abstract. RT-Studio (Real Time Studio) is an integrated environment
RT-Studio: A tool for modular design and analysis of realtime systems using Interpreted Time Petri Nets Rachid Hadjidj and Hanifa Boucheneb Abstract. RT-Studio (Real Time Studio) is an integrated environment
Real Time Model Checking
 Real Time Model Checking using UPPAAL Kim G Larsen Collaborators @UPPsala Wang Yi Paul Pettersson John Håkansson Anders Hessel Pavel Krcal Leonid Mokrushin Shi Xiaochun @Elsewhere @AALborg Kim G Larsen
Real Time Model Checking using UPPAAL Kim G Larsen Collaborators @UPPsala Wang Yi Paul Pettersson John Håkansson Anders Hessel Pavel Krcal Leonid Mokrushin Shi Xiaochun @Elsewhere @AALborg Kim G Larsen
Timed Automata Based Scheduling for a Miniature Pipeless Plant with Mobile Robots *
 Timed Automata Based Scheduling for a Miniature Pipeless Plant with Mobile Robots * Christian Schoppmeyer, Martin Hüfner, Subanatarajan Subbiah, and Sebastian Engell Abstract In this contribution we present
Timed Automata Based Scheduling for a Miniature Pipeless Plant with Mobile Robots * Christian Schoppmeyer, Martin Hüfner, Subanatarajan Subbiah, and Sebastian Engell Abstract In this contribution we present
An Introduction to UPPAAL. Purandar Bhaduri Dept. of CSE IIT Guwahati
 An Introduction to UPPAAL Purandar Bhaduri Dept. of CSE IIT Guwahati Email: pbhaduri@iitg.ernet.in OUTLINE Introduction Timed Automata UPPAAL Example: Train Gate Example: Task Scheduling Introduction UPPAAL:
An Introduction to UPPAAL Purandar Bhaduri Dept. of CSE IIT Guwahati Email: pbhaduri@iitg.ernet.in OUTLINE Introduction Timed Automata UPPAAL Example: Train Gate Example: Task Scheduling Introduction UPPAAL:
want turn==me wait req2==0
 Uppaal2k: Small Tutorial Λ 16 October 2002 1 Introduction This document is intended to be used by new comers to Uppaal and verification. Students or engineers with little background in formal methods should
Uppaal2k: Small Tutorial Λ 16 October 2002 1 Introduction This document is intended to be used by new comers to Uppaal and verification. Students or engineers with little background in formal methods should
Timed Automata with Asynchronous Processes: Schedulability and Decidability
 Timed Automata with Asynchronous Processes: Schedulability and Decidability Elena Fersman, Paul Pettersson and Wang Yi Uppsala University, Sweden Abstract. In this paper, we exend timed automata with asynchronous
Timed Automata with Asynchronous Processes: Schedulability and Decidability Elena Fersman, Paul Pettersson and Wang Yi Uppsala University, Sweden Abstract. In this paper, we exend timed automata with asynchronous
Lecture 2. Decidability and Verification
 Lecture 2. Decidability and Verification model temporal property Model Checker yes error-trace Advantages Automated formal verification, Effective debugging tool Moderate industrial success In-house groups:
Lecture 2. Decidability and Verification model temporal property Model Checker yes error-trace Advantages Automated formal verification, Effective debugging tool Moderate industrial success In-house groups:
As Cheap as Possible: Efficient Cost-Optimal Reachability for Priced Timed Automata
 As Cheap as Possible: Efficient Cost-Optimal Reachability for Priced Timed Automata Kim Larsen 1,2, Gerd Behrmann 1,EdBrinksma 2, Ansgar Fehnker 4, Thomas Hune 3,PaulPettersson 5, and Judi Romijn 4 1 Basic
As Cheap as Possible: Efficient Cost-Optimal Reachability for Priced Timed Automata Kim Larsen 1,2, Gerd Behrmann 1,EdBrinksma 2, Ansgar Fehnker 4, Thomas Hune 3,PaulPettersson 5, and Judi Romijn 4 1 Basic
ECDAR: An Environment for Compositional Design and Analysis of Real Time Systems
 ECDAR: An Environment for Compositional Design and Analysis of Real Time Systems AlexandreDavid 1,Kim.G.Larsen 1,AxelLegay 2, UlrikNyman 1,AndrzejWąsowski 3 1 ComputerScience,AalborgUniversity,Denmark
ECDAR: An Environment for Compositional Design and Analysis of Real Time Systems AlexandreDavid 1,Kim.G.Larsen 1,AxelLegay 2, UlrikNyman 1,AndrzejWąsowski 3 1 ComputerScience,AalborgUniversity,Denmark
A Test Case Generation Algorithm for Real-Time Systems
 A Test Case Generation Algorithm for Real-Time Systems Anders Hessel and Paul Pettersson Department of Information Technology Uppsala University, P.O. Box 337 SE-751 05 Uppsala, Sweden {hessel,paupet}@it.uu.se
A Test Case Generation Algorithm for Real-Time Systems Anders Hessel and Paul Pettersson Department of Information Technology Uppsala University, P.O. Box 337 SE-751 05 Uppsala, Sweden {hessel,paupet}@it.uu.se
A game-theoretic approach to real-time system testing David, Alexandre; Larsen, Kim Guldstrand; Li, Shuhao; Nielsen, Brian
 Aalborg Universitet A game-theoretic approach to real-time system testing David, Alexandre; Larsen, Kim Guldstrand; Li, Shuhao; Nielsen, Brian Published in: Design, Automation and Test in Europe DOI (link
Aalborg Universitet A game-theoretic approach to real-time system testing David, Alexandre; Larsen, Kim Guldstrand; Li, Shuhao; Nielsen, Brian Published in: Design, Automation and Test in Europe DOI (link
Synthesis of Optimal Strategies Using HyTech
 GDV 2004 Preliminary Version Synthesis of Optimal Strategies Using HyTech Patricia Bouyer 1,2,3 LSV, UMR 8643, CNRS & ENS de Cachan, France Franck Cassez 1,2,4 IRCCyN, UMR 6597, CNRS, France Emmanuel Fleury
GDV 2004 Preliminary Version Synthesis of Optimal Strategies Using HyTech Patricia Bouyer 1,2,3 LSV, UMR 8643, CNRS & ENS de Cachan, France Franck Cassez 1,2,4 IRCCyN, UMR 6597, CNRS, France Emmanuel Fleury
Formal Verification and Performance Analysis of Embedded Systems
 Formal Verification and Performance Analysis of Embedded Systems Kim G. Larsen CISS, Aalborg U., DK Michael R. Hansen IMM, Technical U. of Denmark, DK DaNES Challenges Application Environment Stepw. Refinem.
Formal Verification and Performance Analysis of Embedded Systems Kim G. Larsen CISS, Aalborg U., DK Michael R. Hansen IMM, Technical U. of Denmark, DK DaNES Challenges Application Environment Stepw. Refinem.
M. De Wulf, L. Doyen,J.-F. Raskin Université Libre de Bruxelles Centre Fédéré en Vérification
 Systematic Implementation of Real-Time Models M. De Wulf, L. Doyen,J.-F. Raskin Université Libre de Bruxelles Centre Fédéré en Vérification Model-based Development for Controllers Make a model of the environment
Systematic Implementation of Real-Time Models M. De Wulf, L. Doyen,J.-F. Raskin Université Libre de Bruxelles Centre Fédéré en Vérification Model-based Development for Controllers Make a model of the environment
plant OUTLINE The Same Goal: Reliable Controllers Who is Who in Real Time Systems
 OUTLINE Introduction Lecture 1: Motivation, examples, problems to solve Modeling and Verication of Timed Systems Lecture 2: Timed automata, and timed automata in UAAL Lecture 3: Symbolic verification:
OUTLINE Introduction Lecture 1: Motivation, examples, problems to solve Modeling and Verication of Timed Systems Lecture 2: Timed automata, and timed automata in UAAL Lecture 3: Symbolic verification:
Developing Uppaal over 15 Years
 Developing Uppaal over 15 Years Gerd Behrmann 1, Alexandre David 2, Kim Guldstrand Larsen 2, Paul Pettersson 3, and Wang Yi 4 1 NORDUnet A/S, Copenhagen, Denmark 2 Department of Computer Science, Aalborg
Developing Uppaal over 15 Years Gerd Behrmann 1, Alexandre David 2, Kim Guldstrand Larsen 2, Paul Pettersson 3, and Wang Yi 4 1 NORDUnet A/S, Copenhagen, Denmark 2 Department of Computer Science, Aalborg
Overview of Timed Automata and UPPAAL
 Overview of Timed Automata and UPPAAL Table of Contents Timed Automata Introduction Example The Query Language UPPAAL Introduction Example Editor Simulator Verifier Conclusions 2 Introduction to Timed
Overview of Timed Automata and UPPAAL Table of Contents Timed Automata Introduction Example The Query Language UPPAAL Introduction Example Editor Simulator Verifier Conclusions 2 Introduction to Timed
Quasimodo. under uncertainty. Alexandre David & K.G Larsen & Aalborg University, DK.
 Quasimodo Testing real-time systems under uncertainty Alexandre David & K.G Larsen & & Shuhaoh Li & Bi Brian Nielsen Aalborg University, DK bnielsen@cs.aau.dk FMCO, Graz, December 1, 2010 Page 1 Automated
Quasimodo Testing real-time systems under uncertainty Alexandre David & K.G Larsen & & Shuhaoh Li & Bi Brian Nielsen Aalborg University, DK bnielsen@cs.aau.dk FMCO, Graz, December 1, 2010 Page 1 Automated
The Modest Toolset: An Integrated Environment for Quantitative Modelling and Verification
 The Modest Toolset: An Integrated Environment for Quantitative Modelling and Verification Arnd Hartmanns and Holger Hermanns Saarland University Computer Science, Saarbrücken, Germany Abstract Probabilities,
The Modest Toolset: An Integrated Environment for Quantitative Modelling and Verification Arnd Hartmanns and Holger Hermanns Saarland University Computer Science, Saarbrücken, Germany Abstract Probabilities,
Aalborg Universitet. Published in: Lecture Notes in Computer Science. DOI (link to publication from Publisher): / _29
: / _29") Aalborg Universitet ECDAR: An Environment for Compositional Design and Analysis of Real Time Systems David, Alexandre; Larsen, Kim Guldstrand; Nyman, Ulrik Mathias; Legay, Axel; Wasowski, Andrzej Published
Aalborg Universitet ECDAR: An Environment for Compositional Design and Analysis of Real Time Systems David, Alexandre; Larsen, Kim Guldstrand; Nyman, Ulrik Mathias; Legay, Axel; Wasowski, Andrzej Published
Improving Dual Bound for Stochastic MILP Models Using Sensitivity Analysis
 Improving Dual Bound for Stochastic MILP Models Using Sensitivity Analysis Vijay Gupta Ignacio E. Grossmann Department of Chemical Engineering Carnegie Mellon University, Pittsburgh Bora Tarhan ExxonMobil
Improving Dual Bound for Stochastic MILP Models Using Sensitivity Analysis Vijay Gupta Ignacio E. Grossmann Department of Chemical Engineering Carnegie Mellon University, Pittsburgh Bora Tarhan ExxonMobil
Polynomial-Time What-If Analysis for Prefix-Manipulating MPLS Networks
 Polynomial-Time What-If Analysis for Prefix-Manipulating MPLS Networks Stefan Schmid University of Vienna, Austria and Segment Routing!... Jiri Srba Aalborg University, Denmark Polynomial-Time What-If
Polynomial-Time What-If Analysis for Prefix-Manipulating MPLS Networks Stefan Schmid University of Vienna, Austria and Segment Routing!... Jiri Srba Aalborg University, Denmark Polynomial-Time What-If
Petri Nets. Petri Nets. Petri Net Example. Systems are specified as a directed bipartite graph. The two kinds of nodes in the graph:
 System Design&Methodologies Fö - 1 System Design&Methodologies Fö - 2 Petri Nets 1. Basic Petri Net Model 2. Properties and Analysis of Petri Nets 3. Extended Petri Net Models Petri Nets Systems are specified
System Design&Methodologies Fö - 1 System Design&Methodologies Fö - 2 Petri Nets 1. Basic Petri Net Model 2. Properties and Analysis of Petri Nets 3. Extended Petri Net Models Petri Nets Systems are specified
15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018
 15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018 In this lecture, we describe a very general problem called linear programming
15-451/651: Design & Analysis of Algorithms October 11, 2018 Lecture #13: Linear Programming I last changed: October 9, 2018 In this lecture, we describe a very general problem called linear programming
Modeling and Verification of Networkon-Chip using Constrained-DEVS
 Modeling and Verification of Networkon-Chip using Constrained-DEVS Soroosh Gholami Hessam S. Sarjoughian School of Computing, Informatics, and Decision Systems Engineering Arizona Center for Integrative
Modeling and Verification of Networkon-Chip using Constrained-DEVS Soroosh Gholami Hessam S. Sarjoughian School of Computing, Informatics, and Decision Systems Engineering Arizona Center for Integrative
Temporal logic-based decision making and control. Jana Tumova Robotics, Perception, and Learning Department (RPL)
") Temporal logic-based decision making and control Jana Tumova Robotics, Perception, and Learning Department (RPL) DARPA Urban Challenge 2007 2 Formal verification Does a system meet requirements? System
Temporal logic-based decision making and control Jana Tumova Robotics, Perception, and Learning Department (RPL) DARPA Urban Challenge 2007 2 Formal verification Does a system meet requirements? System
Software and Energy-aware Computing Fundamentals of static analysis of software
 Software and Energy-aware Computing Fundamentals of static analysis of software John Gallagher Roskilde University ICT-Energy: Energy consumption in future ICT devices Summer School, Aalborg, Denmark,
Software and Energy-aware Computing Fundamentals of static analysis of software John Gallagher Roskilde University ICT-Energy: Energy consumption in future ICT devices Summer School, Aalborg, Denmark,
Intro to UPPAAL. Gerd Behrmann Kim Larsen. BRICS & Aalborg University. Intro to UPPAAL p.1/23
 Intro to UPPAAL p.1/23 Intro to UPPAAL Gerd Behrmann Kim Larsen BRICS & Aalborg University Intro to UPPAAL p.2/23 Plan of the Lecture 1. UPPAAL Architecture 2. UPPAAL Features 3. Train Gate Example 4.
Intro to UPPAAL p.1/23 Intro to UPPAAL Gerd Behrmann Kim Larsen BRICS & Aalborg University Intro to UPPAAL p.2/23 Plan of the Lecture 1. UPPAAL Architecture 2. UPPAAL Features 3. Train Gate Example 4.
Stochastic Games for Verification of Probabilistic Timed Automata
 Stochastic ames for Verification of Probabilistic Timed Automata Marta Kwiatkowska, ethin Norman, and David Parker Oxford University Computing Laboratory, Parks Road, Oxford, OX1 3QD Abstract. Probabilistic
Stochastic ames for Verification of Probabilistic Timed Automata Marta Kwiatkowska, ethin Norman, and David Parker Oxford University Computing Laboratory, Parks Road, Oxford, OX1 3QD Abstract. Probabilistic
A Modeling Framework for Schedulability Analysis of Distributed Avionics Systems. Pujie Han MARS/VPT Thessaloniki, 20 April 2018
 A Modeling Framework for Schedulability Analysis of Distributed Avionics Systems Pujie Han MARS/VPT Thessaloniki, 20 April 2018 Index Background Approach Modeling Case study Index Background Approach Modeling
A Modeling Framework for Schedulability Analysis of Distributed Avionics Systems Pujie Han MARS/VPT Thessaloniki, 20 April 2018 Index Background Approach Modeling Case study Index Background Approach Modeling
Verification and Validation meet Planning and Scheduling
 Verification and Validation meet Planning and Scheduling AndreA Orlandini (CNR-ISTC) Email: andrea.orlandini@istc.cnr.it National Research Council of Italy (CNR-ISTC) P&S Autonomy and V&V P&S systems are
Verification and Validation meet Planning and Scheduling AndreA Orlandini (CNR-ISTC) Email: andrea.orlandini@istc.cnr.it National Research Council of Italy (CNR-ISTC) P&S Autonomy and V&V P&S systems are
Fachgebiet Softwaretechnik, Heinz Nixdorf Institut, Universität Paderborn. 2.3 Timed Automata and Real-Time Statecharts
 2.3 Timed Automata and Real-Time Statecharts Develop a BOOK RATING APP and win awesome prizes! The creators of the best submissions will be invited to an exclusive party in February
2.3 Timed Automata and Real-Time Statecharts Develop a BOOK RATING APP and win awesome prizes! The creators of the best submissions will be invited to an exclusive party in February
Real Time Model Checking
 Real Time Model Checking using UPPAAL Kim G Larsen Collaborators @UPPsala Wang Yi Paul Pettersson John Håkansson Anders Hessel Pavel Krcal Leonid Mokrushin Shi Xiaochun @Elsewhere @AALborg Kim G Larsen
Real Time Model Checking using UPPAAL Kim G Larsen Collaborators @UPPsala Wang Yi Paul Pettersson John Håkansson Anders Hessel Pavel Krcal Leonid Mokrushin Shi Xiaochun @Elsewhere @AALborg Kim G Larsen
Specification and Analysis of Real-Time Systems Using Real-Time Maude
 Specification and Analysis of Real-Time Systems Using Real-Time Maude Peter Csaba Ölveczky1,2 and José Meseguer 1 1 Department of Computer Science, University of Illinois at Urbana-Champaign 2 Department
Specification and Analysis of Real-Time Systems Using Real-Time Maude Peter Csaba Ölveczky1,2 and José Meseguer 1 1 Department of Computer Science, University of Illinois at Urbana-Champaign 2 Department
lpsymphony - Integer Linear Programming in R
 lpsymphony - Integer Linear Programming in R Vladislav Kim October 30, 2017 Contents 1 Introduction 2 2 lpsymphony: Quick Start 2 3 Integer Linear Programming 5 31 Equivalent and Dual Formulations 5 32
lpsymphony - Integer Linear Programming in R Vladislav Kim October 30, 2017 Contents 1 Introduction 2 2 lpsymphony: Quick Start 2 3 Integer Linear Programming 5 31 Equivalent and Dual Formulations 5 32
15-780: MarkovDecisionProcesses
 15-780: MarkovDecisionProcesses J. Zico Kolter Feburary 29, 2016 1 Outline Introduction Formal definition Value iteration Policy iteration Linear programming for MDPs 2 1988 Judea Pearl publishes Probabilistic
15-780: MarkovDecisionProcesses J. Zico Kolter Feburary 29, 2016 1 Outline Introduction Formal definition Value iteration Policy iteration Linear programming for MDPs 2 1988 Judea Pearl publishes Probabilistic
Automated Formal Methods for Embedded Systems
 Automated Formal Methods for Embedded Systems Bernd Finkbeiner Universität des Saarlandes Reactive Systems Group 2011/02/03 Bernd Finkbeiner (UdS) Embedded Systems 2011/02/03 1 / 48 Automated Formal Methods
Automated Formal Methods for Embedded Systems Bernd Finkbeiner Universität des Saarlandes Reactive Systems Group 2011/02/03 Bernd Finkbeiner (UdS) Embedded Systems 2011/02/03 1 / 48 Automated Formal Methods
Testing and Verification
 Final Review Brussels, December 12th, 2008 Achievements and Perspectives : Testing and Verification Cluster leader : Kim Guldstrand Larsen CISS, Aalborg University, DENMARK Core Partners of the Cluster
Final Review Brussels, December 12th, 2008 Achievements and Perspectives : Testing and Verification Cluster leader : Kim Guldstrand Larsen CISS, Aalborg University, DENMARK Core Partners of the Cluster
PRISM-games 2.0: A Tool for Multi-Objective Strategy Synthesis for Stochastic Games
 PRISM-games 2.0: A Tool for Multi-Objective Strategy Synthesis for Stochastic Games Marta Kwiatkowska 1, David Parker 2, and Clemens Wiltsche 1 1 Department of Computer Science, University of Oxford, UK
PRISM-games 2.0: A Tool for Multi-Objective Strategy Synthesis for Stochastic Games Marta Kwiatkowska 1, David Parker 2, and Clemens Wiltsche 1 1 Department of Computer Science, University of Oxford, UK
 CS6704 RESOURCE MANAGEMENT TECHNIQUES TOPIC WISE QUESTION BANK LINEAR PROGRAMMING PROBLEMS 1) What is OR techniques? Where it can be used? 2) What is OR? List out various applications of OR. 3) Explain
CS6704 RESOURCE MANAGEMENT TECHNIQUES TOPIC WISE QUESTION BANK LINEAR PROGRAMMING PROBLEMS 1) What is OR techniques? Where it can be used? 2) What is OR? List out various applications of OR. 3) Explain
TAPAAL: Editor, Simulator and Verifier of Timed-Arc Petri Nets
 TAPAAL: Editor, Simulator and Verifier of Timed-Arc Petri Nets Joakim Byg, Kenneth Yrke Jørgensen, and Jiří Srba Department of Computer Science, Aalborg University, Selma Lagerlöfs Vej 300, 9220 Aalborg
TAPAAL: Editor, Simulator and Verifier of Timed-Arc Petri Nets Joakim Byg, Kenneth Yrke Jørgensen, and Jiří Srba Department of Computer Science, Aalborg University, Selma Lagerlöfs Vej 300, 9220 Aalborg
MODEL-BASED DESIGN OF CODE FOR PLC CONTROLLERS
 Krzysztof Sacha Warsaw University of Technology, Nowowiejska 15/19, 00-665 Warszawa, Poland k.sacha@ia.pw.edu.pl Keywords: Abstract: Automatic program generation, Model verification, Finite state machine,
Krzysztof Sacha Warsaw University of Technology, Nowowiejska 15/19, 00-665 Warszawa, Poland k.sacha@ia.pw.edu.pl Keywords: Abstract: Automatic program generation, Model verification, Finite state machine,
CSE 417 Branch & Bound (pt 4) Branch & Bound
 Branch & Bound") CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
CSE 417 Branch & Bound (pt 4) Branch & Bound Reminders > HW8 due today > HW9 will be posted tomorrow start early program will be slow, so debugging will be slow... Review of previous lectures > Complexity
Workstation Cluster. AVACS S3 Phase 2. July 28, 2011
 Workstation Cluster AVACS S3 Phase 2 July 28, 2011 1 Description of the Model In this test case, we consider the dependability of a fault-tolerant workstation cluster [5]. Notably, we consider a finite-state
Workstation Cluster AVACS S3 Phase 2 July 28, 2011 1 Description of the Model In this test case, we consider the dependability of a fault-tolerant workstation cluster [5]. Notably, we consider a finite-state
Large-Scale Optimization and Logical Inference
 Large-Scale Optimization and Logical Inference John Hooker Carnegie Mellon University October 2014 University College Cork Research Theme Large-scale optimization and logical inference. Optimization on
Large-Scale Optimization and Logical Inference John Hooker Carnegie Mellon University October 2014 University College Cork Research Theme Large-scale optimization and logical inference. Optimization on
Introduction to Linear Programming
 Introduction to Linear Programming Eric Feron (updated Sommer Gentry) (updated by Paul Robertson) 16.410/16.413 Historical aspects Examples of Linear programs Historical contributor: G. Dantzig, late 1940
Introduction to Linear Programming Eric Feron (updated Sommer Gentry) (updated by Paul Robertson) 16.410/16.413 Historical aspects Examples of Linear programs Historical contributor: G. Dantzig, late 1940
Temporal Refinement Using SMT and Model Checking with an Application to Physical-Layer Protocols
 Temporal Refinement Using SMT and Model Checking with an Application to Physical-Layer Protocols Lee Pike (Presenting), Galois, Inc. leepike@galois.com Geoffrey M. Brown, Indiana University geobrown@cs.indiana.edu
Temporal Refinement Using SMT and Model Checking with an Application to Physical-Layer Protocols Lee Pike (Presenting), Galois, Inc. leepike@galois.com Geoffrey M. Brown, Indiana University geobrown@cs.indiana.edu
UPPAAL - Now, Next, and Future
 UPPAAL - Now, Next, and Future Tobias Amnell 1, Gerd Behrmann 2, Johan Bengtsson 1, Pedro R. D Argenio 3, Alexandre David 1, Ansgar Fehnker 4, Thomas Hune 5, Bertrand Jeannet 2, Kim G. Larsen 2, M. Oliver
UPPAAL - Now, Next, and Future Tobias Amnell 1, Gerd Behrmann 2, Johan Bengtsson 1, Pedro R. D Argenio 3, Alexandre David 1, Ansgar Fehnker 4, Thomas Hune 5, Bertrand Jeannet 2, Kim G. Larsen 2, M. Oliver
The UPPAAL Model Checker. Julián Proenza Systems, Robotics and Vision Group. UIB. SPAIN
 The UPPAAL Model Checker Julián Proenza Systems, Robotics and Vision Group. UIB. SPAIN The aim of this presentation Introduce the basic concepts of model checking from a practical perspective Describe
The UPPAAL Model Checker Julián Proenza Systems, Robotics and Vision Group. UIB. SPAIN The aim of this presentation Introduce the basic concepts of model checking from a practical perspective Describe
Verification Options. To Store Or Not To Store? Inside the UPPAAL tool. Inactive (passive) Clock Reduction. Global Reduction
 Clock Reduction. Global Reduction") Inside the UPPAAL tool Data Structures DBM s (Difference Bounds Matrices) Canonical and Minimal Constraints Algorithms Reachability analysis Liveness checking Termination Verification Otions Verification
Inside the UPPAAL tool Data Structures DBM s (Difference Bounds Matrices) Canonical and Minimal Constraints Algorithms Reachability analysis Liveness checking Termination Verification Otions Verification
Action Language Verifier, Extended
 Action Language Verifier, Extended Tuba Yavuz-Kahveci 1, Constantinos Bartzis 2, and Tevfik Bultan 3 1 University of Florida 2 Carnegie Mellon University 3 UC, Santa Barbara 1 Introduction Action Language
Action Language Verifier, Extended Tuba Yavuz-Kahveci 1, Constantinos Bartzis 2, and Tevfik Bultan 3 1 University of Florida 2 Carnegie Mellon University 3 UC, Santa Barbara 1 Introduction Action Language
Reinforcement learning algorithms for non-stationary environments. Devika Subramanian Rice University
 Reinforcement learning algorithms for non-stationary environments Devika Subramanian Rice University Joint work with Peter Druschel and Johnny Chen of Rice University. Supported by a grant from Southwestern
Reinforcement learning algorithms for non-stationary environments Devika Subramanian Rice University Joint work with Peter Druschel and Johnny Chen of Rice University. Supported by a grant from Southwestern
A Toolchain for Home Automation Controller Development
 A Toolchain for Home Automation Controller Development Peter H. Dalsgaard, Thibaut Le Guilly, Daniel Middelhede, Petur Olsen, Thomas Pedersen, Anders P. Ravn, Arne Skou Department of Computer Science Aalborg
A Toolchain for Home Automation Controller Development Peter H. Dalsgaard, Thibaut Le Guilly, Daniel Middelhede, Petur Olsen, Thomas Pedersen, Anders P. Ravn, Arne Skou Department of Computer Science Aalborg
HARDWARE SOFTWARE CO-DESIGN
 HARDWARE SOFTWARE CO-DESIGN BITS Pilani Dubai Campus Dr Jagadish Nayak Introduction BITS Pilani Dubai Campus What is this? Hardware/Software codesign investigates the concurrent design of hardware and
HARDWARE SOFTWARE CO-DESIGN BITS Pilani Dubai Campus Dr Jagadish Nayak Introduction BITS Pilani Dubai Campus What is this? Hardware/Software codesign investigates the concurrent design of hardware and
Fault Detection of Reachability Testing with Game Theoretic Approach
 Fault Detection of Reachability Testing with Game Theoretic Approach S. Preetha Dr.M. Punithavalli Research Scholar, Karpagam University, Coimbatore. Director, Sri Ramakrishna Engineering College, Coimbatore.
Fault Detection of Reachability Testing with Game Theoretic Approach S. Preetha Dr.M. Punithavalli Research Scholar, Karpagam University, Coimbatore. Director, Sri Ramakrishna Engineering College, Coimbatore.
Bi-Objective Optimization for Scheduling in Heterogeneous Computing Systems
 Bi-Objective Optimization for Scheduling in Heterogeneous Computing Systems Tony Maciejewski, Kyle Tarplee, Ryan Friese, and Howard Jay Siegel Department of Electrical and Computer Engineering Colorado
Bi-Objective Optimization for Scheduling in Heterogeneous Computing Systems Tony Maciejewski, Kyle Tarplee, Ryan Friese, and Howard Jay Siegel Department of Electrical and Computer Engineering Colorado
Xuandong Li. BACH: Path-oriented Reachability Checker of Linear Hybrid Automata
 BACH: Path-oriented Reachability Checker of Linear Hybrid Automata Xuandong Li Department of Computer Science and Technology, Nanjing University, P.R.China Outline Preliminary Knowledge Path-oriented Reachability
BACH: Path-oriented Reachability Checker of Linear Hybrid Automata Xuandong Li Department of Computer Science and Technology, Nanjing University, P.R.China Outline Preliminary Knowledge Path-oriented Reachability
This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No
 This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 643921. TOOLS INTEGRATION UnCoVerCPS toolchain Goran Frehse, UGA Xavier
This project has received funding from the European Union s Horizon 2020 research and innovation programme under grant agreement No 643921. TOOLS INTEGRATION UnCoVerCPS toolchain Goran Frehse, UGA Xavier
Formal modelling and verification in UPPAAL
 Budapest University of Technology and Economics Department of Measurement and Information Systems Fault Tolerant Systems Research Group Critical Embedded Systems Formal modelling and verification in UPPAAL
Budapest University of Technology and Economics Department of Measurement and Information Systems Fault Tolerant Systems Research Group Critical Embedded Systems Formal modelling and verification in UPPAAL
AMATH 383 Lecture Notes Linear Programming
 AMATH 8 Lecture Notes Linear Programming Jakob Kotas (jkotas@uw.edu) University of Washington February 4, 014 Based on lecture notes for IND E 51 by Zelda Zabinsky, available from http://courses.washington.edu/inde51/notesindex.htm.
AMATH 8 Lecture Notes Linear Programming Jakob Kotas (jkotas@uw.edu) University of Washington February 4, 014 Based on lecture notes for IND E 51 by Zelda Zabinsky, available from http://courses.washington.edu/inde51/notesindex.htm.
Software verification for ubiquitous computing
 Software verification for ubiquitous computing Marta Kwiatkowska Computing Laboratory, University of Oxford QA 09, Grenoble, June 2009 Software everywhere Electronic devices, ever smaller Laptops, phones,
Software verification for ubiquitous computing Marta Kwiatkowska Computing Laboratory, University of Oxford QA 09, Grenoble, June 2009 Software everywhere Electronic devices, ever smaller Laptops, phones,
Model checking pushdown systems
 Model checking pushdown systems R. Ramanujam Institute of Mathematical Sciences, Chennai jam@imsc.res.in Update Meeting, IIT-Guwahati, 4 July 2006 p. 1 Sources of unboundedness Data manipulation: integers,
Model checking pushdown systems R. Ramanujam Institute of Mathematical Sciences, Chennai jam@imsc.res.in Update Meeting, IIT-Guwahati, 4 July 2006 p. 1 Sources of unboundedness Data manipulation: integers,