Teleimmersion System. Contents. Dr. Gregorij Kurillo. n Introduction. n UCB. n Current problems. n Multi-stereo camera system
|
|
|
- Shana Polly Singleton
- 5 years ago
- Views:
Transcription
1 Teleimmersion System Dr. Gregorij Kurillo Contents n Introduction n UCB n Current problems n Multi-stereo camera system n Networking n Rendering n Conclusion 1
2 3D scene 3D scene Internet 2 Internet 2 Interactive 3D display at remote location Interactive 3D display at remote location Teleimmersion n Tele-Immersion is aimed to enable users in geographically distributed sites to collaborate in real time in a shared simulated environment as if they were in the same physical room n Combines computer vision, graphics and network communications What is Teleimmersion? n Tele-immersion connects remote places through a shared virtual environment Internet 2 3D scene Interactive 3D display at remote location Bidirectional 3D data transmission 2



3 Meeting in Virtual Space site 1 site 3 site 2 Applications n Collaborative work 3D CAD design Ergonomics Entertainment (games) Remote learning and training Coordination of activities (dancing, rehabilitation) n Measurement tool 3D motion capture of body segments Medicine & rehabilitation 3

4 UCB n CITRIS lab in Hearst Memorial Mining Building n 36 degree stereo capturing n Full-body 3D reconstruction n Real-time data recording n Real-time rendering n Collaboration through internet II with UIUC UCB 4
5 TI-System n 48 cameras 12 stereo clusters n 8 IR pattern projectors n 4 microphones and 4 speakers n 13 PC computers (2 or 4 CPUs, Windows XP) n 2 projectors for passive stereo projection (using circular polarization) n Real time rendering 3D Reconstruction Image capture (64x48) Resize (32x24) 3 ms Rectification Background subtraction Edge extraction 15~2 ms Region-based correlation 15~2 ms Reconstruction (Triangulation) Total: 13~18 ms 5





6 Image capture & Resize Background subtraction Edge extraction & RB Correlation Reconstruction Depth Map Real World, Real Problems Holes & noise Calibration Missing data Poor blending of pixels 6
 n Poor reconstruction (e.g.")
7 Headaches n Cameras producing a lot of noise (i.e. outliers) n Poor reconstruction (e.g. holes, flickering) n Small range of capturing n Some cameras do not work properly n Delays in data transfer Cameras n 48 Dragonfly CCD Cameras (Point Grey) 12 color and 36 black & white cameras Firewire connection, IEEE x48 resolution, 15 FPS Synchronization through hardware triggering 7

 5.89 5.89 5.88 5.88 Avg. intensity [..255] 5.87 5.86 5.85 5.84 5.83 Intensity [..255] 5.87 5.86 5.85 5.84 5.83 5.82 5.81 5.")
8 CCD Sensor n 1/3 Sony CCD with square pixels n 6dB signal/noise ratio n CCD noise has three major components*: photon noise read noise fixed pattern noise n 1 dark images recorded with delay of 2ms n Stability of background noise examined on 1 images recorded with delay of 1s *G. Kamberova, R. Bajcsy, Sensor errors and the uncertainties in stereo reconstruction, in: K.W. Bowyer, P.J. Phillips, eds., Empirical Evaluation Techniques in Computer Vision, pp IEEE Computer Society Press, Average intensity of 1 dark images (Clust #1, Cam #1) 5.9 Mean intensity of a set of dark images (Clust #1, Cam #1) Avg. intensity [..255] Intensity [..255] Rows frames 8
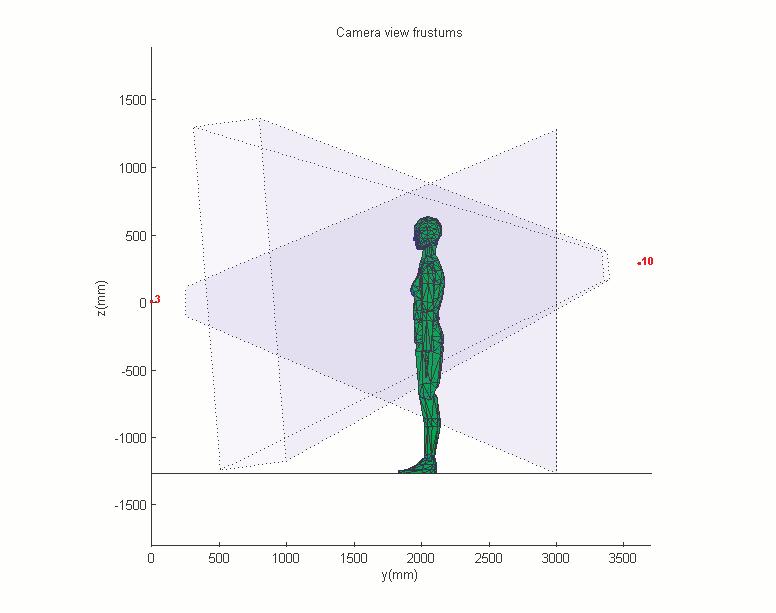
9 Noise Analysis (Dark Images) Camera 1 Camera 2 Camera 3 Cluster min max mean std min max mean std min max mean std min... minimal intensity value in the average of 1 dark images max... maximal intensity value in the average of 1 dark images mean... average intensity of 1 dark images std... average per-pixel standard deviation of intensity of 1 dark images Stereo Clusters n 12 camera clusters n Trinocular stereo system + color camera on top n Problem of point correspondence n Optimization of viewing volume P x x 1 x 2 o o 1 o 2 9


10 o 1 x 1 x o x 2 o 2 P Rotation of the side cameras for and 3 degrees Rotation of top camera for and 2 degrees 1

 11")
11 New Stereo Cluster n Optimized position of the cameras n More robust structure n Protection of camera circuit boards Optimization of Viewing Volume n Configuration of stereo clusters n Volume coverage analysis n Camera configuration analysis n Re-arrange the cameras to increase coverage n Solve existing problems of the ti-system n Wide coverage of volume (e.g. for dancing) 11

12 Volume Coverage Simulator 12

13 Camera Simulator Problems with the old configuration 13



14 Camera Arrangement Before After n 6mm lens with the volume coverage of about 45Hºx34Vº Lenses n 4mm lens with the volume coverage of about 64Hºx49Vº 14
15 6mm lens 4mm lens n Resized volume = decreased resolution of captured objects n Use of wide angle lenses for lower body parts Illumination n Photometric properties of objects: Lambertian (e.g. matte surfaces) Diffuse (diffuser) Reflective (e.g. mirror) Specular (e.g. metal objects) n Specular light creates problem with 3D reconstruction (correspondence of points!) n Diffusive light needed to prevent shadows 15


16 Illumination n Camera hardware parameters: Lens aperture n Camera software parameters: Exposure Brightness Shutter Gain n Lights Too bright Too dark - Lens aperture - Shutter - Gain 16


17 Lighting n Diffused lights n Daylight illumination n brightline SeriesONE 1.1 n Eight 55W 56K lamps 2 ceiling fixtures 4 top-down fixtures 2 floor fixtures What Should I Wear??? n Texture helps correlation n Use of IR patterns to increase texture n Colors that work well: Skin colors Soft colors (e.g. yellow, pink, off-white) n Black or dark colors tend to blend with the background + less features extracted = poor 3D reconstruction 17


 n Nonlinear")
 * R.Y.")


18 Camera Calibration n Tsai* camera calibration method n Pinhole perspective projection model n Two step calibration: Intrinsic parameters (grid collection) Extrinsic parameters (LED point collection) n Nonlinear optimization n Camera Calibration Toolbox for Matlab (ETHZ) * R.Y. Tsai,An Efficient and Accurate Camera Calibration Technique for 3D Machine Vision. Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, Miami Beach, FL, pp ,
: Focal length Principal point Skew coefficient Radial distortion Intrinsic Parameters (after")
19 19 Camera Model n Model for image formation: n Radial distortion model: ' X X x g K K Π = Π = λ = Θ ' ' Z Y X T R o fs o fs fs y x y y x x λ ) (1 ) (1 d d d d y x r r a a r y y r a a r x x + = + + = + + = Intrinsic Parameters n Automatic grid detection n Parameters (K): Focal length Principal point Skew coefficient Radial distortion Intrinsic Parameters (after 2 iterations): Focal Length: fc = [ ] ± [ ] Principal point: cc = [ ] ± [.. ] Skew: alpha_c = [. ] ± [. ] Distortion: kc = [ ] Pixel error: err = [ ]
 Extrinsic Parameters Extrinsic Parameters (after 2")
![iterations): R = [-.6376-35.8337 1.4434] T = [949.6298 18.](/docs-images/93/114279518/images/20-1.jpg "49745 645.78758] Rn = [-.63783-35.83675 1.4257] Tn = [949.891 18.")
20 n LED position capture n Parameters: Rotations (Rc) Positions (Tc) Extrinsic Parameters Extrinsic Parameters (after 2 iterations): R = [ ] T = [ ] Rn = [ ] Tn = [ ] 2
21 Camera Calibration Errors n Depth error due to lens distortion n Depth error due to non-parallel CCD to the lens plane: 1 2%, 2 7%, 3 14% (at 2mm) n Depth error due to the composition of calibration errors (position and rotation between cameras) Relative roll: 1.5%, 2.1%, 3.7% Relative pitch: 1.5%, 2.2%, 3.75% Relative yaw: 1 1%, 2 3%, 3 45% * W. Zhao, N. Nandhakumar, Effects of camera alignment errors on stereoscopic depth estimates, Pattern Recognition, vol. 29, pp ,
22 Improved Calibration n Described calibration is very time-consuming n Accuracy of the entire system depends on calibration of one camera n Multi-camera self-calibration using only LED points (T. Svoboda, 25*) n Internal calibration of cameras inside clusters + calibration of clusters by known geometry (IR) *T. Svoboda, D. Martinec, and T. Pajdla. A convenient multi-camera self-calibration for virtual environments. PRESENCE: Teleoperators and Virtual Environments, pp , 14(4), August 25. Networking n Ability to send captured data through network in real time with minimum delays n Provide reliable transfer of 3D data n Transfer of 3D points not possible n Compression and other transfer schemes used 22
23 Data Capturing n 64x48 b&w and color images n Raw data saved in run-lengthencoding (RLE) format n Z-lib lossless compression n Composed of packets whose size depends on the image coverage Header [1b] Depth [2b] B(lue) [1b] G(reen) [1b] R(ed) [1b] Header: Frame num [2b] [4b] Compress. size [4b] Network Configuration UCB RENDERER UIUC RENDERER Cam #1 Cam #1 Cam #2 Internet (TCP/IP) Cam #2 Cam #12 1Mbit / 1 GBit Cam #6 TRIGGER TRIGGER 23
24 Analysis of Network Traffic # DATE ACTION PRO Local Address:Port Remote Address:Port Status Bytes /9/26 13:37:28 RECEIVE TCP : :2365 SUCCESS /9/26 13:37:28 RECEIVE TCP : :2365 SUCCESS /9/26 13:37:28 RECEIVE TCP : :2365 SUCCESS /9/26 13:37:28 RECEIVE TCP : :168 SUCCESS /9/26 13:37:28 RECEIVE TCP : :168 SUCCESS /9/26 13:37:28 RECEIVE TCP : :1586 SUCCESS /9/26 13:37:28 RECEIVE TCP : :1586 SUCCESS /9/26 13:37:28 RECEIVE TCP : :1586 SUCCESS /9/26 13:37:28 RECEIVE TCP : :1586 SUCCESS /9/26 13:37:28 RECEIVE TCP : :1586 SUCCESS /9/26 13:37:28 RECEIVE TCP : :168 SUCCESS /9/26 13:37:28 RECEIVE TCP : :1586 SUCCESS /9/26 13:37:29 RECEIVE TCP : :1644 SUCCESS /9/26 13:37:29 RECEIVE TCP : :1644 SUCCESS 1 One person, one minute, average of three trials One 3D stream for 32x24 (pixels/frame): 7 to 2 KB/s One TI site (1 3D Streams): 1,36 KB/s Most data comes through in one TCP/IP package 25 Average transfer speed during 1 minute trial (n=3) Transfer speed KB/s Std Avg Cluster # 24
25 n Current problems: Networking Problems Each camera has to send data to multiple renderers = more traffic Reliability of connection Reliability of transfer speed New Network Configuration RENDERER 1 RENDERER 2 Cam #1 UCB GATEWAY Internet (TCP/IP) 1Mbit / 1 GBit UIUC GATEWAY Cam #1 Cam #2 Cam #2 Cam #12 Cam #6 TRIGGER TRIGGER 25
26 Rendering n 3D graphic representation of captured data n OpenGL-based application n Renderer is a server, cameras are clients n Real-time (1FPS) rendering of 75, 3D points n Different types of rendering: Quads Splatting Rendering 26
 n Splatting Pre-processing Sensitive to outliers Slow (4")

27 Volume Rendering n Quad rendering Direct rendering of points Fast (1 FPS) n Splatting Pre-processing Sensitive to outliers Slow (4 FPS) * * M. Zwicker, H. Pfister, J. van Baar, M. Gross, Surface Splatting, Proceedings of SIGGRAPH 21 Quad Rendering vs. Splatting 27

28 TI-Renderer n Future improvements: Faster rendering Import common 3D data files (e.g. OBJ, 3DS ) Projection of the scene close to the user Use of hand as a user interface Gaze/face orientation tracking Scene-graph support for collaborative work Tele-Immersive Dance 28
29 Tai-Chi Why s Part I n Dark images, color flickering White balance, color calibration Optimization of aperture, gain etc. n Holes in reconstruction Improper aperture of lenses Poor illumination Not enough texture Too dark materials 29
30 Why s Part II n Noise (outlier points) Poor calibration of stereo cameras Noisy background subtraction Incorrect correlation of points n Hiccups in rendering Delayed triggering due to slow reconstruction on some computers 3
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing and Reconstruction Readings: Ch 12: , Ch 13: ,
 3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
3D Sensing and Reconstruction Readings: Ch 12: 12.5-6, Ch 13: 13.1-3, 13.9.4 Perspective Geometry Camera Model Stereo Triangulation 3D Reconstruction by Space Carving 3D Shape from X means getting 3D coordinates
And. Modal Analysis. Using. VIC-3D-HS, High Speed 3D Digital Image Correlation System. Indian Institute of Technology New Delhi
 Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Full Field Displacement And Strain Measurement And Modal Analysis Using VIC-3D-HS, High Speed 3D Digital Image Correlation System At Indian Institute of Technology New Delhi VIC-3D, 3D Digital Image Correlation
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Product information. Hi-Tech Electronics Pte Ltd
 Product information Introduction TEMA Motion is the world leading software for advanced motion analysis. Starting with digital image sequences the operator uses TEMA Motion to track objects in images,
Product information Introduction TEMA Motion is the world leading software for advanced motion analysis. Starting with digital image sequences the operator uses TEMA Motion to track objects in images,
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Distributed Ray Tracing
 CT5510: Computer Graphics Distributed Ray Tracing BOCHANG MOON Distributed Ray Tracing Motivation The classical ray tracing produces very clean images (look fake) Perfect focus Perfect reflections Sharp
CT5510: Computer Graphics Distributed Ray Tracing BOCHANG MOON Distributed Ray Tracing Motivation The classical ray tracing produces very clean images (look fake) Perfect focus Perfect reflections Sharp
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Camera Calibration. Schedule. Jesus J Caban. Note: You have until next Monday to let me know. ! Today:! Camera calibration
 Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Camera Calibration Jesus J Caban Schedule! Today:! Camera calibration! Wednesday:! Lecture: Motion & Optical Flow! Monday:! Lecture: Medical Imaging! Final presentations:! Nov 29 th : W. Griffin! Dec 1
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Robot Vision: Camera calibration
 Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Robot Vision: Camera calibration Ass.Prof. Friedrich Fraundorfer SS 201 1 Outline Camera calibration Cameras with lenses Properties of real lenses (distortions, focal length, field-of-view) Calibration
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
MERGING POINT CLOUDS FROM MULTIPLE KINECTS. Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia
 MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
MERGING POINT CLOUDS FROM MULTIPLE KINECTS Nishant Rai 13th July, 2016 CARIS Lab University of British Columbia Introduction What do we want to do? : Use information (point clouds) from multiple (2+) Kinects
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Laser sensors. Transmitter. Receiver. Basilio Bona ROBOTICA 03CFIOR
 Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
Mobile & Service Robotics Sensors for Robotics 3 Laser sensors Rays are transmitted and received coaxially The target is illuminated by collimated rays The receiver measures the time of flight (back and
AIT Inline Computational Imaging: Geometric calibration and image rectification
 AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
AIT Inline Computational Imaging: Geometric calibration and image rectification B. Blaschitz, S. Štolc and S. Breuss AIT Austrian Institute of Technology GmbH Center for Vision, Automation & Control Vienna,
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Computer Vision I. Dense Stereo Correspondences. Anita Sellent 1/15/16
 Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Computer Vision I Dense Stereo Correspondences Anita Sellent Stereo Two Cameras Overlapping field of view Known transformation between cameras From disparity compute depth [ Bradski, Kaehler: Learning
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
IEEE Consumer Electronics Society Calibrating a VR Camera. Adam Rowell CTO, Lucid VR
 IEEE Consumer Electronics Society Calibrating a VR Camera Adam Rowell CTO, Lucid VR adam@lucidcam.com Virtual Reality Cameras Lucid VR Camera How Does it Work? Lucid Software Technology Recording: Synchronization
IEEE Consumer Electronics Society Calibrating a VR Camera Adam Rowell CTO, Lucid VR adam@lucidcam.com Virtual Reality Cameras Lucid VR Camera How Does it Work? Lucid Software Technology Recording: Synchronization
Stereo Image Rectification for Simple Panoramic Image Generation
 Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
LUMS Mine Detector Project
 LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
LUMS Mine Detector Project Using visual information to control a robot (Hutchinson et al. 1996). Vision may or may not be used in the feedback loop. Visual (image based) features such as points, lines
1/3" Sony color CCD camera
 It's a call to the nines CPC311 1/3" Sony color CCD camera C & PERFORMANCE Features 1/3" Sony color CCD sensor Very high Sensitivy AES / V.D / D.D Selectable Signal-to-Noise ratio is more than 48dB Support
It's a call to the nines CPC311 1/3" Sony color CCD camera C & PERFORMANCE Features 1/3" Sony color CCD sensor Very high Sensitivy AES / V.D / D.D Selectable Signal-to-Noise ratio is more than 48dB Support
Ellipse Centroid Targeting in 3D Using Machine Vision Calibration and Triangulation (Inspired by NIST Pixel Probe)
") Ellipse Centroid Targeting in 3D Using Machine Vision Calibration and Triangulation (Inspired by NIST Pixel Probe) Final Project EENG 510 December 7, 2015 Steven Borenstein 1 Background NIST Pixel Probe[1]
Ellipse Centroid Targeting in 3D Using Machine Vision Calibration and Triangulation (Inspired by NIST Pixel Probe) Final Project EENG 510 December 7, 2015 Steven Borenstein 1 Background NIST Pixel Probe[1]
3D Vision Real Objects, Real Cameras. Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun,
, 12 (parts of) Computerized Image Analysis MN2 Anders Brun,") 3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
3D Vision Real Objects, Real Cameras Chapter 11 (parts of), 12 (parts of) Computerized Image Analysis MN2 Anders Brun, anders@cb.uu.se 3D Vision! Philisophy! Image formation " The pinhole camera " Projective
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Computer Vision. Coordinates. Prof. Flávio Cardeal DECOM / CEFET- MG.
 Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
Computer Vision Coordinates Prof. Flávio Cardeal DECOM / CEFET- MG cardeal@decom.cefetmg.br Abstract This lecture discusses world coordinates and homogeneous coordinates, as well as provides an overview
DD2423 Image Analysis and Computer Vision IMAGE FORMATION. Computational Vision and Active Perception School of Computer Science and Communication
 DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
DD2423 Image Analysis and Computer Vision IMAGE FORMATION Mårten Björkman Computational Vision and Active Perception School of Computer Science and Communication November 8, 2013 1 Image formation Goal:
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras
 Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Three-Dimensional Sensors Lecture 2: Projected-Light Depth Cameras Radu Horaud INRIA Grenoble Rhone-Alpes, France Radu.Horaud@inria.fr http://perception.inrialpes.fr/ Outline The geometry of active stereo.
Overview. Augmented reality and applications Marker-based augmented reality. Camera model. Binary markers Textured planar markers
 Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Augmented reality Overview Augmented reality and applications Marker-based augmented reality Binary markers Textured planar markers Camera model Homography Direct Linear Transformation What is augmented
Introduction to Computer Vision. Introduction CMPSCI 591A/691A CMPSCI 570/670. Image Formation
 Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Introduction CMPSCI 591A/691A CMPSCI 570/670 Image Formation Lecture Outline Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic
Agenda. Camera Selection Parameters Focal Length Field of View Iris Aperture Automatic Shutter Illumination Resolution S/N Ratio Image Sensor Lens
 HEARTY WELCOME Agenda Camera Selection Parameters Focal Length Field of View Iris Aperture Automatic Shutter Illumination Resolution S/N Ratio Image Sensor Lens Camera Features Backlight Compensation Wide
HEARTY WELCOME Agenda Camera Selection Parameters Focal Length Field of View Iris Aperture Automatic Shutter Illumination Resolution S/N Ratio Image Sensor Lens Camera Features Backlight Compensation Wide
Range Sensors (time of flight) (1)
 (1)") Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
Range Sensors (time of flight) (1) Large range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic sensors, infra-red sensors
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
Tracking Trajectories of Migrating Birds Around a Skyscraper
 Tracking Trajectories of Migrating Birds Around a Skyscraper Brian Crombie Matt Zivney Project Advisors Dr. Huggins Dr. Stewart Abstract In this project, the trajectories of birds are tracked around tall
Tracking Trajectories of Migrating Birds Around a Skyscraper Brian Crombie Matt Zivney Project Advisors Dr. Huggins Dr. Stewart Abstract In this project, the trajectories of birds are tracked around tall
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 3. HIGH DYNAMIC RANGE Computer Vision 2 Dr. Benjamin Guthier Pixel Value Content of this
Minimizing Noise and Bias in 3D DIC. Correlated Solutions, Inc.
 Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Minimizing Noise and Bias in 3D DIC Correlated Solutions, Inc. Overview Overview of Noise and Bias Digital Image Correlation Background/Tracking Function Minimizing Noise Focus Contrast/Lighting Glare
Miniaturized Camera Systems for Microfactories
 Miniaturized Camera Systems for Microfactories Timo Prusi, Petri Rokka, and Reijo Tuokko Tampere University of Technology, Department of Production Engineering, Korkeakoulunkatu 6, 33720 Tampere, Finland
Miniaturized Camera Systems for Microfactories Timo Prusi, Petri Rokka, and Reijo Tuokko Tampere University of Technology, Department of Production Engineering, Korkeakoulunkatu 6, 33720 Tampere, Finland
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Introduction to 3D Machine Vision
 Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Introduction to 3D Machine Vision 1 Many methods for 3D machine vision Use Triangulation (Geometry) to Determine the Depth of an Object By Different Methods: Single Line Laser Scan Stereo Triangulation
Tracking Under Low-light Conditions Using Background Subtraction
 Tracking Under Low-light Conditions Using Background Subtraction Matthew Bennink Clemson University Clemson, South Carolina Abstract A low-light tracking system was developed using background subtraction.
Tracking Under Low-light Conditions Using Background Subtraction Matthew Bennink Clemson University Clemson, South Carolina Abstract A low-light tracking system was developed using background subtraction.
CSCI 5980: Assignment #3 Homography
 Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Submission Assignment due: Feb 23 Individual assignment. Write-up submission format: a single PDF up to 3 pages (more than 3 page assignment will be automatically returned.). Code and data. Submission
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera
 Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Outdoor Scene Reconstruction from Multiple Image Sequences Captured by a Hand-held Video Camera Tomokazu Sato, Masayuki Kanbara and Naokazu Yokoya Graduate School of Information Science, Nara Institute
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Stereo imaging ideal geometry
 Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Stereo imaging ideal geometry (X,Y,Z) Z f (x L,y L ) f (x R,y R ) Optical axes are parallel Optical axes separated by baseline, b. Line connecting lens centers is perpendicular to the optical axis, and
Lecture 19: Depth Cameras. Visual Computing Systems CMU , Fall 2013
 Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
Lecture 19: Depth Cameras Visual Computing Systems Continuing theme: computational photography Cameras capture light, then extensive processing produces the desired image Today: - Capturing scene depth
NTSC/PAL. Network Camera SNC-P1
 NTSC/PAL Network Camera SNC-P1 FEATURES All-in-One Network Camera Enter the World of IP Monitoring with the Sony SNC-P1 MPEG-4/JPEG Network Camera Sony introduces its new SNC-P1 MPEG-4/JPEG network color
NTSC/PAL Network Camera SNC-P1 FEATURES All-in-One Network Camera Enter the World of IP Monitoring with the Sony SNC-P1 MPEG-4/JPEG Network Camera Sony introduces its new SNC-P1 MPEG-4/JPEG network color
Computer Vision I. Announcement. Stereo Vision Outline. Stereo II. CSE252A Lecture 15
 Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Announcement Stereo II CSE252A Lecture 15 HW3 assigned No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Mars Exploratory Rovers: Spirit and Opportunity Stereo Vision Outline
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Pattern Feature Detection for Camera Calibration Using Circular Sample
 Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Pattern Feature Detection for Camera Calibration Using Circular Sample Dong-Won Shin and Yo-Sung Ho (&) Gwangju Institute of Science and Technology (GIST), 13 Cheomdan-gwagiro, Buk-gu, Gwangju 500-71,
Real-time Video Surveillance for Large Scenes
 Real-time Video Surveillance for Large Scenes Hanyu Liu Technical Report Abstract Video surveillance provides security monitoring of target scenes. As the public safety is confronted of more and more neoteric
Real-time Video Surveillance for Large Scenes Hanyu Liu Technical Report Abstract Video surveillance provides security monitoring of target scenes. As the public safety is confronted of more and more neoteric
A Stereo Machine Vision System for. displacements when it is subjected to elasticplastic
 A Stereo Machine Vision System for measuring three-dimensional crack-tip displacements when it is subjected to elasticplastic deformation Arash Karpour Supervisor: Associate Professor K.Zarrabi Co-Supervisor:
A Stereo Machine Vision System for measuring three-dimensional crack-tip displacements when it is subjected to elasticplastic deformation Arash Karpour Supervisor: Associate Professor K.Zarrabi Co-Supervisor:
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
SINGLE CAMERA PHOTOGRAMMETRY USING NOVEL CALIBRATION TECHNIQUES
 SINGLE CAMERA PHOTOGRAMMETRY USING NOVEL CALIBRATION TECHNIQUES A Thesis Submitted to the Faculty of Graduate Studies and Research In Partial Fulfillment of the Requirements For the Degree of Master of
SINGLE CAMERA PHOTOGRAMMETRY USING NOVEL CALIBRATION TECHNIQUES A Thesis Submitted to the Faculty of Graduate Studies and Research In Partial Fulfillment of the Requirements For the Degree of Master of
Today. Stereo (two view) reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography
 reconstruction. Multiview geometry. Today. Multiview geometry. Computational Photography") Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computational Photography Matthias Zwicker University of Bern Fall 2009 Today From 2D to 3D using multiple views Introduction Geometry of two views Stereo matching Other applications Multiview geometry
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
IMAGE DE-NOISING IN WAVELET DOMAIN
 IMAGE DE-NOISING IN WAVELET DOMAIN Aaditya Verma a, Shrey Agarwal a a Department of Civil Engineering, Indian Institute of Technology, Kanpur, India - (aaditya, ashrey)@iitk.ac.in KEY WORDS: Wavelets,
IMAGE DE-NOISING IN WAVELET DOMAIN Aaditya Verma a, Shrey Agarwal a a Department of Civil Engineering, Indian Institute of Technology, Kanpur, India - (aaditya, ashrey)@iitk.ac.in KEY WORDS: Wavelets,
Computer Vision. The image formation process
 Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Computer Vision The image formation process Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic year 2016/2017 The image
Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]
![Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]](/thumbs/80/81283374.jpg "Correspondence and Stereopsis. Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri]") Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Correspondence and Stereopsis Original notes by W. Correa. Figures from [Forsyth & Ponce] and [Trucco & Verri] Introduction Disparity: Informally: difference between two pictures Allows us to gain a strong
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources
 Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Image Based Lighting with Near Light Sources Shiho Furuya, Takayuki Itoh Graduate School of Humanitics and Sciences, Ochanomizu University E-mail: {shiho, itot}@itolab.is.ocha.ac.jp Abstract Recent some
Sony DCR SX-85 SD 16GB Flash Memory Camcorder
 Sony DCR SX-85 SD 16GB Flash Memory Camcorder Product Specifications Basic Specifications Dimensions (Approx.) : Approx. 52.5mm x 57mm x 123.5mm Weight (Approx.) : Approx. 9.5oz (NP-FV30 (supplied battery));
Sony DCR SX-85 SD 16GB Flash Memory Camcorder Product Specifications Basic Specifications Dimensions (Approx.) : Approx. 52.5mm x 57mm x 123.5mm Weight (Approx.) : Approx. 9.5oz (NP-FV30 (supplied battery));
Camera Registration in a 3D City Model. Min Ding CS294-6 Final Presentation Dec 13, 2006
 Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
Camera Registration in a 3D City Model Min Ding CS294-6 Final Presentation Dec 13, 2006 Goal: Reconstruct 3D city model usable for virtual walk- and fly-throughs Virtual reality Urban planning Simulation
CS130 : Computer Graphics Lecture 2: Graphics Pipeline. Tamar Shinar Computer Science & Engineering UC Riverside
 CS130 : Computer Graphics Lecture 2: Graphics Pipeline Tamar Shinar Computer Science & Engineering UC Riverside Raster Devices and Images Raster Devices - raster displays show images as a rectangular array
CS130 : Computer Graphics Lecture 2: Graphics Pipeline Tamar Shinar Computer Science & Engineering UC Riverside Raster Devices and Images Raster Devices - raster displays show images as a rectangular array
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
HD Mini Square Camera. Key Features
 HD Mini Square Camera 1080p (1920 x 1080) @ 30fps (Standard) Easy Installation (HD Over Coax (BNC)) Board Lens f= 3.6mm or 6.0 mm HD-SDI (Serial Digital Interface Type Video Output) Selectable TV Out (NTSC
HD Mini Square Camera 1080p (1920 x 1080) @ 30fps (Standard) Easy Installation (HD Over Coax (BNC)) Board Lens f= 3.6mm or 6.0 mm HD-SDI (Serial Digital Interface Type Video Output) Selectable TV Out (NTSC
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA
 AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA V. A. Knyaz * GosNIIAS, State Research Institute of Aviation System, 539 Moscow, Russia knyaz@gosniias.ru
AUTOMATED CALIBRATION TECHNIQUE FOR PHOTOGRAMMETRIC SYSTEM BASED ON A MULTI-MEDIA PROJECTOR AND A CCD CAMERA V. A. Knyaz * GosNIIAS, State Research Institute of Aviation System, 539 Moscow, Russia knyaz@gosniias.ru
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows
 ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
ENGN2911I: 3D Photography and Geometry Processing Assignment 1: 3D Photography using Planar Shadows Instructor: Gabriel Taubin Assignment written by: Douglas Lanman 29 January 2009 Figure 1: 3D Photography
Politecnico di Milano
 Politecnico di Milano Industrial Engineering Faculty Master of Science in Mechanical Engineering Stereoscopic measurements uncertainty analysis: a numerical and experimental approach Supervisor: Prof.
Politecnico di Milano Industrial Engineering Faculty Master of Science in Mechanical Engineering Stereoscopic measurements uncertainty analysis: a numerical and experimental approach Supervisor: Prof.
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (with Ground Control Points)
: Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (with Ground Control Points)") Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (with Ground Control Points) Overview Agisoft PhotoScan Professional allows to generate georeferenced dense point
Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (with Ground Control Points) Overview Agisoft PhotoScan Professional allows to generate georeferenced dense point
Easy to Use Calibration of Multiple Camera Setups
 Easy to Use Calibration of Multiple Camera Setups Ferenc Kahlesz, Cornelius Lilge, and Reinhard Klein University of Bonn, Institute of Computer Science II, Computer Graphics Group Römerstrasse 164, D-53117
Easy to Use Calibration of Multiple Camera Setups Ferenc Kahlesz, Cornelius Lilge, and Reinhard Klein University of Bonn, Institute of Computer Science II, Computer Graphics Group Römerstrasse 164, D-53117
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
A COMPREHENSIVE SIMULATION SOFTWARE FOR TEACHING CAMERA CALIBRATION
 XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal A COMPREHENSIVE SIMULATION SOFTWARE FOR TEACHING CAMERA CALIBRATION David Samper 1, Jorge Santolaria 1,
XIX IMEKO World Congress Fundamental and Applied Metrology September 6 11, 2009, Lisbon, Portugal A COMPREHENSIVE SIMULATION SOFTWARE FOR TEACHING CAMERA CALIBRATION David Samper 1, Jorge Santolaria 1,
An Embedded Calibration Stereovision System
 2012 Intelligent Vehicles Symposium Alcalá de Henares, Spain, June 3-7, 2012 An Embedded Stereovision System JIA Yunde and QIN Xiameng Abstract This paper describes an embedded calibration stereovision
2012 Intelligent Vehicles Symposium Alcalá de Henares, Spain, June 3-7, 2012 An Embedded Stereovision System JIA Yunde and QIN Xiameng Abstract This paper describes an embedded calibration stereovision
Cameras and Stereo CSE 455. Linda Shapiro
 Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Cameras and Stereo CSE 455 Linda Shapiro 1 Müller-Lyer Illusion http://www.michaelbach.de/ot/sze_muelue/index.html What do you know about perspective projection? Vertical lines? Other lines? 2 Image formation
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points)
: Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points)") Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points) Overview Agisoft PhotoScan Professional allows to generate georeferenced dense point
Tutorial (Beginner level): Orthomosaic and DEM Generation with Agisoft PhotoScan Pro 1.3 (without Ground Control Points) Overview Agisoft PhotoScan Professional allows to generate georeferenced dense point
Available online at ScienceDirect. Procedia Technology 22 (2016 )
") Available online at www.sciencedirect.com ScienceDirect Procedia Technology 22 (2016 ) 562 569 9th International Conference Interdisciplinarity in Engineering, INTER-ENG 2015, 8-9 October 2015, Tirgu-Mures,
Available online at www.sciencedirect.com ScienceDirect Procedia Technology 22 (2016 ) 562 569 9th International Conference Interdisciplinarity in Engineering, INTER-ENG 2015, 8-9 October 2015, Tirgu-Mures,
Camera models and calibration
 Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Camera models and calibration Read tutorial chapter 2 and 3. http://www.cs.unc.edu/~marc/tutorial/ Szeliski s book pp.29-73 Schedule (tentative) 2 # date topic Sep.8 Introduction and geometry 2 Sep.25
Robotics - Projective Geometry and Camera model. Marcello Restelli
 Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
Robotics - Projective Geometr and Camera model Marcello Restelli marcello.restelli@polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria Politecnico di Milano Ma 2013 Inspired from Matteo
10/5/09 1. d = 2. Range Sensors (time of flight) (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.
 (2) Ultrasonic Sensor (time of flight, sound) (1) Ultrasonic Sensor (time of flight, sound) (2) 4.1.") Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Range Sensors (time of flight) (1) Range Sensors (time of flight) (2) arge range distance measurement -> called range sensors Range information: key element for localization and environment modeling Ultrasonic
Measurement of 3D Foot Shape Deformation in Motion
 Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Measurement of 3D Foot Shape Deformation in Motion Makoto Kimura Masaaki Mochimaru Takeo Kanade Digital Human Research Center National Institute of Advanced Industrial Science and Technology, Japan The
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
DRC A Multi-Camera System on PC-Cluster for Real-time 3-D Tracking. Viboon Sangveraphunsiri*, Kritsana Uttamang, and Pongsakon Pedpunsri
 The 23 rd Conference of the Mechanical Engineering Network of Thailand November 4 7, 2009, Chiang Mai A Multi-Camera System on PC-Cluster for Real-time 3-D Tracking Viboon Sangveraphunsiri*, Kritsana Uttamang,
The 23 rd Conference of the Mechanical Engineering Network of Thailand November 4 7, 2009, Chiang Mai A Multi-Camera System on PC-Cluster for Real-time 3-D Tracking Viboon Sangveraphunsiri*, Kritsana Uttamang,
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Il colore: acquisizione e visualizzazione. Lezione 17: 11 Maggio 2012
 Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color
Il colore: acquisizione e visualizzazione Lezione 17: 11 Maggio 2012 The importance of color information Precision vs. Perception 3D scanned geometry Photo Color and appearance Pure geometry Pure color