Lecture 24: More on Reflectance CAP 5415
|
|
|
- Ashley Barnett
- 5 years ago
- Views:
Transcription
1 Lecture 24: More on Reflectance CAP 5415
2 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface isn t diffuse?
3

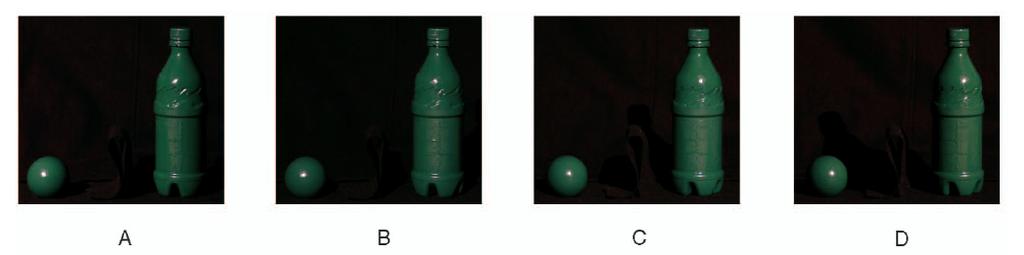
4 Basic Idea Assume illumination is distant Illumination only depends on orientation of the point on the surface A sphere can tell us the illumination at every surface normal (Image from Ron Dror)

5 Basic Idea How can I tell the orientation of every point on the bottle?
6

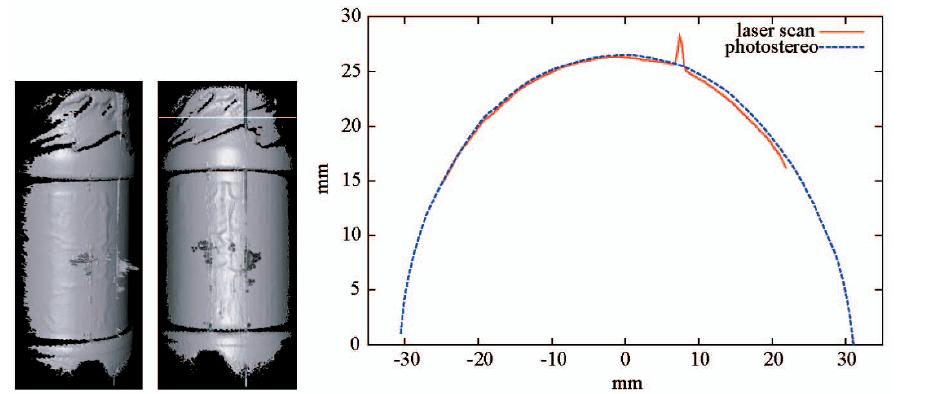
7 Results from the bottle

8 Key Advantage Can work with materials that are difficult to model mathematically
9 Estimating Reflectance This method works well When a probe is available If a probe is not available, then we have to use the reflectance of the object How can we recover the reflectance?
10 One option: Use the statistics of the real world Every image is a picture of the illumination of the real world Like images, the histograms of illuminations have a regular appearance (From Dror and Adelson)
11

12 Basic method looks at the response of steerable-pyramid responses In some sense, associates different materials with different textures%
13 Works surprisingly well

14 94% Accuracy on these materials Similar to human performance Classified based on a number of histogram measurements (percentile values, moments, etc.)
15 Limitations Works on objects of known geometry What if we have an arbitrary scene? How can we solve the problem then? Make a simplifying assumption: Surfaces are Lambertian Now we only need to recover the albedo
16 View the image as shading and albedo This is shading These stripes are reflectance changes



17 Take this image Goal: Find the albedo Observation Shading Information Albedo Information By splitting it into two images that represent the shading and albedo of the scene
18 Why? The effects of these characteristics are combined together in the image To understand this image, we need to be able to separate the effects of these characteristics
19 Other reasons Ability to reason about shading and reflectance independently is necessary for most image understanding tasks. Material recognition Image segmentation Want to understand how humans might do the task. An engineering application: for image editing, want access and modify the intrinsic images separately Intrinsic images are a convenient representation. More informative than just the image Less complex than fully reconstructing the scene
 The squares marked A and B have the same")
20 Your visual system is trying to solve a similar problem (From Edward Adelson) The squares marked A and B have the same intensity
21 What is shading? Shading is the interaction of the shape of the surface and the illumination Shading image should look like gray plaster
22 Albedo Albedo Fraction of light reflected at a point Albedo image represents the albedo at every point on the surface Points inside the squares should reflect less light
23 An image is formed as x Shading Reflec Image Albedo Image Observed Image
24 Our goal is to invert the process Observed Image Shading Image Albedo Image Using images to represent characteristics that are intrinsic to the scene s appearance Known as intrinsic image representation [Barrow and Tenenbaum 1978]
25 Estimating Shading and Albedo Images
 Shading image Smooth")
26 First, Simplified Model of the World Observation Albedo Image Shading Image Albedo image Patches of constant albedo Called Mondrian Images (Land and McCann) Shading image Smooth
27 Given this observation, what s the albedo image? Observation
28 Estimation in 1-D It s easy to see how to estimate the albedo in 1-D Image Intensity Column in the image We ll work in the log domain, so the problem is additive
29 Now compute the derivative The locations of the changes in the albedo image are obvious Log Image Intensity Log Image Intensity Column in the image Column in the image
30 Eliminate the derivatives caused by shading changes Set everything but these derivatives to 0, then re-integrate Log Image Intensity Log Image Intensity Column in the image Column in the image Known as the Retinex Algorithm [Land and McCann] Estimate of the log albedo image


31 Basic Strategy for Estimating Images Pseudo-Inverse Classify Every Derivative as Shading or Albedo Change Estimate of the horizontal derivative Observation Estimate of the Albedo Image Estimate of the vertical derivative Similar to Horn s Implementation

32 Where Retinex Breaks Down Unfortunately, this assumption is often broken in the real-world
33 Retinex Most other work on this problem still uses the same basic assumption (Kimmel 03) Researchers have also tried augmenting the input Use multiple images, like time-lapse [Weiss 2001, Matsushita 2003] Color (Funt et al.) Extra information may not be available Estimating shading and albedo from a single, gray-scale image is a good test our ability to model images and surfaces
34 Beyond Mondrians Can go beyond the simple world of Mondrian images in two ways: Learn better models of local image statistics Look at an image patch rather than just a single derivative value Propagate information across the image

35 Why Propagate? One of these patches is an albedo change and the other is shading


36 Recovering Intrinsic Images Classify each x and y image derivative as being caused by either shading or a reflectance change Recover the intrinsic images by finding the leastsquares reconstruction from each set of labeled derivatives. (Fast Matlab code for that available from Yair Weiss s web page.) Original x derivative image Classify each derivative (White is reflectance)
37 Outline of our algorithm Gather local evidence for shading or reflectance Color (chromaticity changes) Form (local image patterns) Integrate the local evidence across space. Assume a probabilistic model and use belief propagation. Show results on example images
38 Probabilistic graphical model Unknown Derivative Labels (hidden random variables that we want to estimate)
39 Probabilistic graphical model Local evidence Local Color Evidence Derivative Labels Some statistical relationship that we ll specify
40 Probabilistic graphical model Local evidence Local Form Evidence Local Color Evidence Derivative Labels
41 Probabilistic graphical model Propagate the local evidence in Markov Random Field. This strategy can be used to solve other low-level vision problems. Local Evidence Hidden state to be estimated Influence of Neighbor
42 Local Color Evidence For a Lambertian surface, and simple illumination conditions, shading only affects the intensity of the color of a surface Notice that the chromaticity of each face is the same Any change in chromaticity must be a reflectance change
43 Classifying Color Changes Chromaticity Changes Angle between the two vectors, _, is greater than 0 Intensity Changes Angle between two vectors, _, equals 0 Red Red _ Blue Blue Green Green
44 Color Classification Algorithm 1. Normalize the two color vectors c 1 and c 2 c 1 c 2 2. If (c 1 c 2 ) < T Derivative is a reflectance change Otherwise, label derivative as shading

45 Result using only color information


46 Results Using Only Color Input Shading Reflectance Some changes are ambiguous Intensity changes could be caused by shading or reflectance So we label it as ambiguous Need more information
47 Utilizing local intensity patterns The painted eye and the ripples of the fabric have very different appearances Can learn classifiers which take advantage of these differences
Recovering Intrinsic Images from a Single Image
 Recovering Intrinsic Images from a Single Image Marshall F Tappen William T Freeman Edward H Adelson MIT Artificial Intelligence Laboratory Cambridge, MA 02139 mtappen@ai.mit.edu, wtf@ai.mit.edu, adelson@ai.mit.edu
Recovering Intrinsic Images from a Single Image Marshall F Tappen William T Freeman Edward H Adelson MIT Artificial Intelligence Laboratory Cambridge, MA 02139 mtappen@ai.mit.edu, wtf@ai.mit.edu, adelson@ai.mit.edu
Computational Photography and Video: Intrinsic Images. Prof. Marc Pollefeys Dr. Gabriel Brostow
 Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Computational Photography and Video: Intrinsic Images Prof. Marc Pollefeys Dr. Gabriel Brostow Last Week Schedule Computational Photography and Video Exercises 18 Feb Introduction to Computational Photography
Other approaches to obtaining 3D structure
 Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Other approaches to obtaining 3D structure Active stereo with structured light Project structured light patterns onto the object simplifies the correspondence problem Allows us to use only one camera camera
Lecture 22: Basic Image Formation CAP 5415
 Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Lecture 22: Basic Image Formation CAP 5415 Today We've talked about the geometry of scenes and how that affects the image We haven't talked about light yet Today, we will talk about image formation and
Learning Continuous Models for Estimating Intrinsic Component Images. Marshall Friend Tappen
 Learning Continuous Models for Estimating Intrinsic Component Images by Marshall Friend Tappen B.S. Computer Science, Brigham Young University, 2000 S.M. Electrical Engineering and Computer Science, Massachusetts
Learning Continuous Models for Estimating Intrinsic Component Images by Marshall Friend Tappen B.S. Computer Science, Brigham Young University, 2000 S.M. Electrical Engineering and Computer Science, Massachusetts
Understanding Variability
 Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Understanding Variability Why so different? Light and Optics Pinhole camera model Perspective projection Thin lens model Fundamental equation Distortion: spherical & chromatic aberration, radial distortion
Colour Reading: Chapter 6. Black body radiators
 Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Colour Reading: Chapter 6 Light is produced in different amounts at different wavelengths by each light source Light is differentially reflected at each wavelength, which gives objects their natural colours
Radiance. Pixels measure radiance. This pixel Measures radiance along this ray
 Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
Photometric stereo Radiance Pixels measure radiance This pixel Measures radiance along this ray Where do the rays come from? Rays from the light source reflect off a surface and reach camera Reflection:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
Intrinsic Image Decomposition with Non-Local Texture Cues
 Intrinsic Image Decomposition with Non-Local Texture Cues Li Shen Microsoft Research Asia Ping Tan National University of Singapore Stephen Lin Microsoft Research Asia Abstract We present a method for
Intrinsic Image Decomposition with Non-Local Texture Cues Li Shen Microsoft Research Asia Ping Tan National University of Singapore Stephen Lin Microsoft Research Asia Abstract We present a method for
Photometric Stereo. Lighting and Photometric Stereo. Computer Vision I. Last lecture in a nutshell BRDF. CSE252A Lecture 7
 Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Lighting and Photometric Stereo Photometric Stereo HW will be on web later today CSE5A Lecture 7 Radiometry of thin lenses δa Last lecture in a nutshell δa δa'cosα δacos β δω = = ( z' / cosα ) ( z / cosα
Introduction to Computer Vision. Week 8, Fall 2010 Instructor: Prof. Ko Nishino
 Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Introduction to Computer Vision Week 8, Fall 2010 Instructor: Prof. Ko Nishino Midterm Project 2 without radial distortion correction with radial distortion correction Light Light Light! How do you recover
Statistical image models
 Chapter 4 Statistical image models 4. Introduction 4.. Visual worlds Figure 4. shows images that belong to different visual worlds. The first world (fig. 4..a) is the world of white noise. It is the world
Chapter 4 Statistical image models 4. Introduction 4.. Visual worlds Figure 4. shows images that belong to different visual worlds. The first world (fig. 4..a) is the world of white noise. It is the world
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
CS6670: Computer Vision Noah Snavely Lecture 20: Light, reflectance and photometric stereo Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Light by Ted Adelson Readings Szeliski, 2.2, 2.3.2 Properties
Assignment #2. (Due date: 11/6/2012)
") Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Computer Vision I CSE 252a, Fall 2012 David Kriegman Assignment #2 (Due date: 11/6/2012) Name: Student ID: Email: Problem 1 [1 pts] Calculate the number of steradians contained in a spherical wedge with
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
CS5670: Computer Vision Noah Snavely Light & Perception Announcements Quiz on Tuesday Project 3 code due Monday, April 17, by 11:59pm artifact due Wednesday, April 19, by 11:59pm Can we determine shape
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
General Principles of 3D Image Analysis
 General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
General Principles of 3D Image Analysis high-level interpretations objects scene elements Extraction of 3D information from an image (sequence) is important for - vision in general (= scene reconstruction)
Photometric Stereo.
 Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Photometric Stereo Photometric Stereo v.s.. Structure from Shading [1] Photometric stereo is a technique in computer vision for estimating the surface normals of objects by observing that object under
Epipolar geometry contd.
 Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Epipolar geometry contd. Estimating F 8-point algorithm The fundamental matrix F is defined by x' T Fx = 0 for any pair of matches x and x in two images. Let x=(u,v,1) T and x =(u,v,1) T, each match gives
Shadow Removal from a Single Image
 Shadow Removal from a Single Image Li Xu Feihu Qi Renjie Jiang Department of Computer Science and Engineering, Shanghai JiaoTong University, P.R. China E-mail {nathan.xu, fhqi, blizard1982}@sjtu.edu.cn
Shadow Removal from a Single Image Li Xu Feihu Qi Renjie Jiang Department of Computer Science and Engineering, Shanghai JiaoTong University, P.R. China E-mail {nathan.xu, fhqi, blizard1982}@sjtu.edu.cn
Announcements. Photometric Stereo. Shading reveals 3-D surface geometry. Photometric Stereo Rigs: One viewpoint, changing lighting
 Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Announcements Today Photometric Stereo, next lecture return to stereo Photometric Stereo Introduction to Computer Vision CSE152 Lecture 16 Shading reveals 3-D surface geometry Two shape-from-x methods
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923
 Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Public Library, Stereoscopic Looking Room, Chicago, by Phillips, 1923 Teesta suspension bridge-darjeeling, India Mark Twain at Pool Table", no date, UCR Museum of Photography Woman getting eye exam during
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Estimating Intrinsic Images from Image Sequences with Biased Illumination
 Estimating Intrinsic Images from Image Sequences with Biased Illumination Yasuyuki Matsushita 1, Stephen Lin 1, Sing Bing Kang 2, and Heung-Yeung Shum 1 1 Microsoft Research Asia 3F, Beijing Sigma Center,
Estimating Intrinsic Images from Image Sequences with Biased Illumination Yasuyuki Matsushita 1, Stephen Lin 1, Sing Bing Kang 2, and Heung-Yeung Shum 1 1 Microsoft Research Asia 3F, Beijing Sigma Center,
Ground truth dataset and baseline evaluations for intrinsic image algorithms
 Ground truth dataset and baseline evaluations for intrinsic image algorithms Roger Grosse Micah K. Johnson Edward H. Adelson William T. Freeman Massachusetts Institute of Technology Cambridge, MA 02139
Ground truth dataset and baseline evaluations for intrinsic image algorithms Roger Grosse Micah K. Johnson Edward H. Adelson William T. Freeman Massachusetts Institute of Technology Cambridge, MA 02139
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Physics-based Vision: an Introduction
 Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Physics-based Vision: an Introduction Robby Tan ANU/NICTA (Vision Science, Technology and Applications) PhD from The University of Tokyo, 2004 1 What is Physics-based? An approach that is principally concerned
Announcement. Lighting and Photometric Stereo. Computer Vision I. Surface Reflectance Models. Lambertian (Diffuse) Surface.
 Surface.") Lighting and Photometric Stereo CSE252A Lecture 7 Announcement Read Chapter 2 of Forsyth & Ponce Might find section 12.1.3 of Forsyth & Ponce useful. HW Problem Emitted radiance in direction f r for incident
Lighting and Photometric Stereo CSE252A Lecture 7 Announcement Read Chapter 2 of Forsyth & Ponce Might find section 12.1.3 of Forsyth & Ponce useful. HW Problem Emitted radiance in direction f r for incident
Lecture 15: Shading-I. CITS3003 Graphics & Animation
 Lecture 15: Shading-I CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn that with appropriate shading so objects appear as threedimensional
Lecture 15: Shading-I CITS3003 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 2012 Objectives Learn that with appropriate shading so objects appear as threedimensional
Estimation of Multiple Illuminants from a Single Image of Arbitrary Known Geometry*
 Estimation of Multiple Illuminants from a Single Image of Arbitrary Known Geometry* Yang Wang, Dimitris Samaras Computer Science Department, SUNY-Stony Stony Brook *Support for this research was provided
Estimation of Multiple Illuminants from a Single Image of Arbitrary Known Geometry* Yang Wang, Dimitris Samaras Computer Science Department, SUNY-Stony Stony Brook *Support for this research was provided
Color Alignment in Texture Mapping of Images under Point Light Source and General Lighting Condition
 Color Alignment in Texture Mapping of Images under Point Light Source and General Lighting Condition Hiroki Unten Graduate School of Information Science and Technology The University of Tokyo unten@cvliisu-tokyoacjp
Color Alignment in Texture Mapping of Images under Point Light Source and General Lighting Condition Hiroki Unten Graduate School of Information Science and Technology The University of Tokyo unten@cvliisu-tokyoacjp
Property of: Entrada Interactive. PBR Workflow. Working within a PBR-based environment
 Property of: Entrada Interactive PBR Workflow Working within a PBR-based environment Ryan Manning 8/24/2014 MISCREATED PBR WORKFLOW CryDocs on Physically Based Shading/Rendering: http://docs.cryengine.com/display/sdkdoc4/physically+based+rendering
Property of: Entrada Interactive PBR Workflow Working within a PBR-based environment Ryan Manning 8/24/2014 MISCREATED PBR WORKFLOW CryDocs on Physically Based Shading/Rendering: http://docs.cryengine.com/display/sdkdoc4/physically+based+rendering
Interreflection Removal for Photometric Stereo by Using Spectrum-dependent Albedo
 Interreflection Removal for Photometric Stereo by Using Spectrum-dependent Albedo Miao Liao 1, Xinyu Huang, and Ruigang Yang 1 1 Department of Computer Science, University of Kentucky Department of Mathematics
Interreflection Removal for Photometric Stereo by Using Spectrum-dependent Albedo Miao Liao 1, Xinyu Huang, and Ruigang Yang 1 1 Department of Computer Science, University of Kentucky Department of Mathematics
Reconstruction of Discrete Surfaces from Shading Images by Propagation of Geometric Features
 Reconstruction of Discrete Surfaces from Shading Images by Propagation of Geometric Features Achille Braquelaire and Bertrand Kerautret LaBRI, Laboratoire Bordelais de Recherche en Informatique UMR 58,
Reconstruction of Discrete Surfaces from Shading Images by Propagation of Geometric Features Achille Braquelaire and Bertrand Kerautret LaBRI, Laboratoire Bordelais de Recherche en Informatique UMR 58,
Deriving intrinsic images from image sequences
 Deriving intrinsic images from image sequences Yair Weiss Computer Science Division UC Berkeley Berkeley, CA 94720-1776 yweiss@cs.berkeley.edu Abstract Intrinsic images are a useful midlevel description
Deriving intrinsic images from image sequences Yair Weiss Computer Science Division UC Berkeley Berkeley, CA 94720-1776 yweiss@cs.berkeley.edu Abstract Intrinsic images are a useful midlevel description
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Lambertian model of reflectance I: shape from shading and photometric stereo. Ronen Basri Weizmann Institute of Science
 Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Lambertian model of reflectance I: shape from shading and photometric stereo Ronen Basri Weizmann Institute of Science Variations due to lighting (and pose) Relief Dumitru Verdianu Flying Pregnant Woman
Geometric and Photometric Restoration of Distorted Documents
 Geometric and Photometric Restoration of Distorted Documents Mingxuan Sun, Ruigang Yang, Lin Yun, George Landon, Brent Seales University of Kentucky Lexington, KY Michael S. Brown Cal State - Monterey
Geometric and Photometric Restoration of Distorted Documents Mingxuan Sun, Ruigang Yang, Lin Yun, George Landon, Brent Seales University of Kentucky Lexington, KY Michael S. Brown Cal State - Monterey
Estimating Intrinsic Component Images using Non-Linear Regression
 Estimating Intrinsic Component Images using Non-Linear Regression Marshall F. Tappen Edward H. Adelson William T. Freeman MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139
Estimating Intrinsic Component Images using Non-Linear Regression Marshall F. Tappen Edward H. Adelson William T. Freeman MIT Computer Science and Artificial Intelligence Laboratory Cambridge, MA 02139
Image Processing 1 (IP1) Bildverarbeitung 1
 Bildverarbeitung 1") MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 20: Shape from Shading Winter Semester 2015/16 Slides: Prof. Bernd Neumann Slightly
MIN-Fakultät Fachbereich Informatik Arbeitsbereich SAV/BV (KOGS) Image Processing 1 (IP1) Bildverarbeitung 1 Lecture 20: Shape from Shading Winter Semester 2015/16 Slides: Prof. Bernd Neumann Slightly
CAP 5415 Computer Vision. Fall 2011
 CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40
 Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Homework 4 Computer Vision CS 4731, Fall 2011 Due Date: Nov. 15, 2011 Total Points: 40 Note 1: Both the analytical problems and the programming assignments are due at the beginning of class on Nov 15,
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination
 High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination Yudeog Han Joon-Young Lee In So Kweon Robotics and Computer Vision Lab., KAIST ydhan@rcv.kaist.ac.kr jylee@rcv.kaist.ac.kr
High Quality Shape from a Single RGB-D Image under Uncalibrated Natural Illumination Yudeog Han Joon-Young Lee In So Kweon Robotics and Computer Vision Lab., KAIST ydhan@rcv.kaist.ac.kr jylee@rcv.kaist.ac.kr
Lecture 16: Computer Vision
 CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
CS442/542b: Artificial ntelligence Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field Methods
Lecture 16: Computer Vision
 CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4442/9542b: Artificial Intelligence II Prof. Olga Veksler Lecture 16: Computer Vision Motion Slides are from Steve Seitz (UW), David Jacobs (UMD) Outline Motion Estimation Motion Field Optical Flow Field
CS4670/5760: Computer Vision
 CS4670/5760: Computer Vision Kavita Bala! Lecture 28: Photometric Stereo Thanks to ScoC Wehrwein Announcements PA 3 due at 1pm on Monday PA 4 out on Monday HW 2 out on weekend Next week: MVS, sfm Last
CS4670/5760: Computer Vision Kavita Bala! Lecture 28: Photometric Stereo Thanks to ScoC Wehrwein Announcements PA 3 due at 1pm on Monday PA 4 out on Monday HW 2 out on weekend Next week: MVS, sfm Last
Illumination Decomposition for Material Editing with Consistent Interreflections
 Illumination Decomposition for Material Editing with Consistent Interreflections Robert Carroll Maneesh Agrawala Ravi Ramamoorthi University of California, Berkeley Presented by Wesley Willett Computational
Illumination Decomposition for Material Editing with Consistent Interreflections Robert Carroll Maneesh Agrawala Ravi Ramamoorthi University of California, Berkeley Presented by Wesley Willett Computational
Optical flow and tracking
 EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
EECS 442 Computer vision Optical flow and tracking Intro Optical flow and feature tracking Lucas-Kanade algorithm Motion segmentation Segments of this lectures are courtesy of Profs S. Lazebnik S. Seitz,
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Capturing light. Source: A. Efros
 Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Capturing light Source: A. Efros Review Pinhole projection models What are vanishing points and vanishing lines? What is orthographic projection? How can we approximate orthographic projection? Lenses
Multiple View Geometry
 Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Multiple View Geometry CS 6320, Spring 2013 Guest Lecture Marcel Prastawa adapted from Pollefeys, Shah, and Zisserman Single view computer vision Projective actions of cameras Camera callibration Photometric
Introduction to Digital Modelling and Animation in Design week 4 Textures
 Introduction to Digital Modelling and Animation in Design week 4 Textures Thaleia Deniozou - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Introduction to Digital Modelling and Animation in Design week 4 Textures Thaleia Deniozou - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
Color and Shading. Color. Shapiro and Stockman, Chapter 6. Color and Machine Vision. Color and Perception
 Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Color and Shading Color Shapiro and Stockman, Chapter 6 Color is an important factor for for human perception for object and material identification, even time of day. Color perception depends upon both
Photometric Stereo, Shape from Shading SfS Chapter Szelisky
 Photometric Stereo, Shape from Shading SfS Chapter 12.1.1. Szelisky Guido Gerig CS 6320, Spring 2012 Credits: M. Pollefey UNC CS256, Ohad Ben-Shahar CS BGU, Wolff JUN (http://www.cs.jhu.edu/~wolff/course600.461/week9.3/index.htm)
Photometric Stereo, Shape from Shading SfS Chapter 12.1.1. Szelisky Guido Gerig CS 6320, Spring 2012 Credits: M. Pollefey UNC CS256, Ohad Ben-Shahar CS BGU, Wolff JUN (http://www.cs.jhu.edu/~wolff/course600.461/week9.3/index.htm)
Starting this chapter
 Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Computer Vision 5. Source, Shadow, Shading Department of Computer Engineering Jin-Ho Choi 05, April, 2012. 1/40 Starting this chapter The basic radiometric properties of various light sources Develop models
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Practical Image and Video Processing Using MATLAB
 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation What will we learn? What is feature extraction and why is it a critical step in most computer vision and
Stereo Matching.
 Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
Stereo Matching Stereo Vision [1] Reduction of Searching by Epipolar Constraint [1] Photometric Constraint [1] Same world point has same intensity in both images. True for Lambertian surfaces A Lambertian
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
And if that 120MP Camera was cool
 Reflectance, Lights and on to photometric stereo CSE 252A Lecture 7 And if that 120MP Camera was cool Large Synoptic Survey Telescope 3.2Gigapixel camera 189 CCD s, each with 16 megapixels Pixels are 10µm
Reflectance, Lights and on to photometric stereo CSE 252A Lecture 7 And if that 120MP Camera was cool Large Synoptic Survey Telescope 3.2Gigapixel camera 189 CCD s, each with 16 megapixels Pixels are 10µm
Introduction to Radiosity
 Introduction to Radiosity Produce photorealistic pictures using global illumination Mathematical basis from the theory of heat transfer Enables color bleeding Provides view independent representation Unfortunately,
Introduction to Radiosity Produce photorealistic pictures using global illumination Mathematical basis from the theory of heat transfer Enables color bleeding Provides view independent representation Unfortunately,
Light source estimation using feature points from specular highlights and cast shadows
 Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Vol. 11(13), pp. 168-177, 16 July, 2016 DOI: 10.5897/IJPS2015.4274 Article Number: F492B6D59616 ISSN 1992-1950 Copyright 2016 Author(s) retain the copyright of this article http://www.academicjournals.org/ijps
Photometric Stereo. Photometric Stereo. Shading reveals 3-D surface geometry BRDF. HW3 is assigned. An example of photometric stereo
 Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Photometric Stereo Photometric Stereo HW3 is assigned Introduction to Computer Vision CSE5 Lecture 6 Shading reveals 3-D surface geometry Shape-from-shading: Use just one image to recover shape. Requires
Combining Cues: Shape from Shading and Texture
 Combining Cues: Shape from Shading and Texture Ryan White University of California, Berkeley ryanw@cs.berkeley.edu David A. Forsyth University of Illinois, Urbana Champaign daf@cs.uiuc.edu Abstract We
Combining Cues: Shape from Shading and Texture Ryan White University of California, Berkeley ryanw@cs.berkeley.edu David A. Forsyth University of Illinois, Urbana Champaign daf@cs.uiuc.edu Abstract We
Module 5: Video Modeling Lecture 28: Illumination model. The Lecture Contains: Diffuse and Specular Reflection. Objectives_template
 The Lecture Contains: Diffuse and Specular Reflection file:///d /...0(Ganesh%20Rana)/MY%20COURSE_Ganesh%20Rana/Prof.%20Sumana%20Gupta/FINAL%20DVSP/lecture%2028/28_1.htm[12/30/2015 4:22:29 PM] Diffuse and
The Lecture Contains: Diffuse and Specular Reflection file:///d /...0(Ganesh%20Rana)/MY%20COURSE_Ganesh%20Rana/Prof.%20Sumana%20Gupta/FINAL%20DVSP/lecture%2028/28_1.htm[12/30/2015 4:22:29 PM] Diffuse and
Learning local evidence for shading and reflectance
 MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Learning local evidence for shading and reflectance Matt Bell, William T. Freeman TR2001-04 December 2001 Abstract A fundamental, unsolved
MITSUBISHI ELECTRIC RESEARCH LABORATORIES http://www.merl.com Learning local evidence for shading and reflectance Matt Bell, William T. Freeman TR2001-04 December 2001 Abstract A fundamental, unsolved
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Lighting. Figure 10.1
 We have learned to build three-dimensional graphical models and to display them. However, if you render one of our models, you might be disappointed to see images that look flat and thus fail to show the
We have learned to build three-dimensional graphical models and to display them. However, if you render one of our models, you might be disappointed to see images that look flat and thus fail to show the
COMP 558 lecture 16 Nov. 8, 2010
 Shading The term shading typically refers to variations in irradiance along a smooth Lambertian surface. Recall that if a surface point is illuminated by parallel light source from direction l, then the
Shading The term shading typically refers to variations in irradiance along a smooth Lambertian surface. Recall that if a surface point is illuminated by parallel light source from direction l, then the
Time-to-Contact from Image Intensity
 Time-to-Contact from Image Intensity Yukitoshi Watanabe Fumihiko Sakaue Jun Sato Nagoya Institute of Technology Gokiso, Showa, Nagoya, 466-8555, Japan {yukitoshi@cv.,sakaue@,junsato@}nitech.ac.jp Abstract
Time-to-Contact from Image Intensity Yukitoshi Watanabe Fumihiko Sakaue Jun Sato Nagoya Institute of Technology Gokiso, Showa, Nagoya, 466-8555, Japan {yukitoshi@cv.,sakaue@,junsato@}nitech.ac.jp Abstract
Shading and Recognition OR The first Mrs Rochester. D.A. Forsyth, UIUC
 Shading and Recognition OR The first Mrs Rochester D.A. Forsyth, UIUC Structure Argument: History why shading why shading analysis died reasons for hope Classical SFS+Critiques Primitives Reconstructions
Shading and Recognition OR The first Mrs Rochester D.A. Forsyth, UIUC Structure Argument: History why shading why shading analysis died reasons for hope Classical SFS+Critiques Primitives Reconstructions
CHAPTER 9. Classification Scheme Using Modified Photometric. Stereo and 2D Spectra Comparison
 CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
CHAPTER 9 Classification Scheme Using Modified Photometric Stereo and 2D Spectra Comparison 9.1. Introduction In Chapter 8, even we combine more feature spaces and more feature generators, we note that
Sources, shadows and shading
 Sources, shadows and shading But how bright (or what colour) are objects? One more definition: Exitance of a source is the internally generated power radiated per unit area on the radiating surface similar
Sources, shadows and shading But how bright (or what colour) are objects? One more definition: Exitance of a source is the internally generated power radiated per unit area on the radiating surface similar
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Announcement. Photometric Stereo. Computer Vision I. Shading reveals 3-D surface geometry. Shape-from-X. CSE252A Lecture 8
 Announcement Photometric Stereo Lecture 8 Read Chapter 2 of Forsyth & Ponce Office hours tomorrow: 3-5, CSE 4127 5-6, CSE B260A Piazza Next lecture Shape-from-X Shading reveals 3-D surface geometry Where
Announcement Photometric Stereo Lecture 8 Read Chapter 2 of Forsyth & Ponce Office hours tomorrow: 3-5, CSE 4127 5-6, CSE B260A Piazza Next lecture Shape-from-X Shading reveals 3-D surface geometry Where
Shadow detection and removal from a single image
 Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow detection and removal from a single image Corina BLAJOVICI, Babes-Bolyai University, Romania Peter Jozsef KISS, University of Pannonia, Hungary Zoltan BONUS, Obuda University, Hungary Laszlo VARGA,
Shadow Detection and Removal in Real Images: A Survey
 Li Xu, Feihu Qi, Renjie Jiang, Yunfeng Hao, Guorong Wu, Computer Vision Laboratory, Department of Computer Science and Engineering, Shanghai JiaoTong University, P.R. China June 1 st, 2006 CVLAB, SJTU
Li Xu, Feihu Qi, Renjie Jiang, Yunfeng Hao, Guorong Wu, Computer Vision Laboratory, Department of Computer Science and Engineering, Shanghai JiaoTong University, P.R. China June 1 st, 2006 CVLAB, SJTU
CS 4495 Computer Vision Motion and Optic Flow
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS4 is out, due Sunday Oct 27 th. All relevant lectures posted Details about Problem Set: You may *not* use built in Harris
INTRINSIC IMAGE DECOMPOSITION BY HIERARCHICAL L 0 SPARSITY
 INTRINSIC IMAGE DECOMPOSITION BY HIERARCHICAL L 0 SPARSITY Xuecheng Nie 1,2, Wei Feng 1,3,, Liang Wan 2,3, Haipeng Dai 1, Chi-Man Pun 4 1 School of Computer Science and Technology, Tianjin University,
INTRINSIC IMAGE DECOMPOSITION BY HIERARCHICAL L 0 SPARSITY Xuecheng Nie 1,2, Wei Feng 1,3,, Liang Wan 2,3, Haipeng Dai 1, Chi-Man Pun 4 1 School of Computer Science and Technology, Tianjin University,
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
CS6670: Computer Vision Noah Snavely Lecture 21: Light, reflectance and photometric stereo Announcements Final projects Midterm reports due November 24 (next Tuesday) by 11:59pm (upload to CMS) State the
Video Mosaics for Virtual Environments, R. Szeliski. Review by: Christopher Rasmussen
 Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Video Mosaics for Virtual Environments, R. Szeliski Review by: Christopher Rasmussen September 19, 2002 Announcements Homework due by midnight Next homework will be assigned Tuesday, due following Tuesday.
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction
 A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
A New Image Based Ligthing Method: Practical Shadow-Based Light Reconstruction Jaemin Lee and Ergun Akleman Visualization Sciences Program Texas A&M University Abstract In this paper we present a practical
then assume that we are given the image of one of these textures captured by a camera at a different (longer) distance and with unknown direction of i
 distance and with unknown direction of i") Image Texture Prediction using Colour Photometric Stereo Xavier Lladó 1, Joan Mart 1, and Maria Petrou 2 1 Institute of Informatics and Applications, University of Girona, 1771, Girona, Spain fllado,joanmg@eia.udg.es
Image Texture Prediction using Colour Photometric Stereo Xavier Lladó 1, Joan Mart 1, and Maria Petrou 2 1 Institute of Informatics and Applications, University of Girona, 1771, Girona, Spain fllado,joanmg@eia.udg.es
Ligh%ng and Reflectance
 Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
Ligh%ng and Reflectance 2 3 4 Ligh%ng Ligh%ng can have a big effect on how an object looks. Modeling the effect of ligh%ng can be used for: Recogni%on par%cularly face recogni%on Shape reconstruc%on Mo%on
CS1114 Assignment 5, Part 1
 CS4 Assignment 5, Part out: Friday, March 27, 2009. due: Friday, April 3, 2009, 5PM. This assignment covers three topics in two parts: interpolation and image transformations (Part ), and feature-based
CS4 Assignment 5, Part out: Friday, March 27, 2009. due: Friday, April 3, 2009, 5PM. This assignment covers three topics in two parts: interpolation and image transformations (Part ), and feature-based
Compact and Low Cost System for the Measurement of Accurate 3D Shape and Normal
 Compact and Low Cost System for the Measurement of Accurate 3D Shape and Normal Ryusuke Homma, Takao Makino, Koichi Takase, Norimichi Tsumura, Toshiya Nakaguchi and Yoichi Miyake Chiba University, Japan
Compact and Low Cost System for the Measurement of Accurate 3D Shape and Normal Ryusuke Homma, Takao Makino, Koichi Takase, Norimichi Tsumura, Toshiya Nakaguchi and Yoichi Miyake Chiba University, Japan
CSE 167: Introduction to Computer Graphics Lecture #6: Lights. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Lecture #6: Lights Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Thursday in class: midterm #1 Closed book Material
CSE 167: Introduction to Computer Graphics Lecture #6: Lights Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Announcements Thursday in class: midterm #1 Closed book Material
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Robust Tracking and Stereo Matching under Variable Illumination
 Robust Tracking and Stereo Matching under Variable Illumination Jingdan Zhang Leonard McMillan UNC Chapel Hill Chapel Hill, NC 27599 {zhangjd,mcmillan}@cs.unc.edu Jingyi Yu University of Delaware Newark,
Robust Tracking and Stereo Matching under Variable Illumination Jingdan Zhang Leonard McMillan UNC Chapel Hill Chapel Hill, NC 27599 {zhangjd,mcmillan}@cs.unc.edu Jingyi Yu University of Delaware Newark,
Computational Perception /785
 Computational Perception 15-485/785 Assignment 5 due Tuesday, April 22 This assignment is different in character from the previous assignments you have done in that it focused entirely on your understanding
Computational Perception 15-485/785 Assignment 5 due Tuesday, April 22 This assignment is different in character from the previous assignments you have done in that it focused entirely on your understanding