Practical Image and Video Processing Using MATLAB
|
|
|
- Pierce Doyle
- 6 years ago
- Views:
Transcription
1 Practical Image and Video Processing Using MATLAB Chapter 18 Feature extraction and representation
2 What will we learn? What is feature extraction and why is it a critical step in most computer vision and image processing solutions? Which types of features can be extracted from an image and how is this usually done? How are the extracted features usually represented for further processing?
3 Introduction Feature extraction is the process by which certain features of interest within an image are detected and represented for further processing. It is a critical step in most computer vision and image processing solutions. It marks the transition from pictorial to non-pictorial (alphanumerical, usually quantitative) data representation. The resulting representation can be subsequently used as the input to a number of pattern recognition and classification techniques which will then label, classify, or recognize the semantic contents of the image or its objects.
4 Introduction Most techniques presented in this chapter assume that an image has undergone segmentation. Goal of feature extraction and representation techniques: to convert the segmented objects into representations that better describe their main features and attributes. There are many ways an image (and its objects) can be represented for image analysis purposes. In this topic we present several representative techniques for feature extraction using a broad range of image properties.
5 Feature vectors and vector spaces A feature vector is a n 1 array that encodes the n features (or measurements) of an image or object. The array contents may be: Symbolic Numerical Both The FV is a compact representation of an image (or object), which can be associated with the notion of a feature space, an n-dimensional hyperspace that allows the visualization (for n < 4) and interpretation of the feature vectors' contents, their relative distances, etc.

6 Feature vectors and vector spaces Example 18.1
7 Invariance and robustness It is often required that the features used to represent an image be invariant to rotation, scaling, and translation (RST). RST invariance ensures that a machine vision system will still be able to recognize objects even when they appear at different size, position within the image, and angle (relative to a horizontal reference). Clearly this requirement is application-dependent.
8 Binary object features Notation: A binary object, in this case, is a connected region within a binary image f(x, y), which will be denoted as O i, i > 0. In MATLAB: bwlabel Mathematically:
9 Binary object features Area: Centroid:
10 Binary object features Axis of least second moment:
11 Binary object features Projections:
12 Binary object features Euler number: E = C - H
13 Binary object features Perimeter: Can be calculated by counting the number of object pixels (whose value is 1) that have one or more background pixels (whose value is 0) as their neighbors. Alternative method: extract the edge (contour) of the object and then count the number of pixels in the resulting border. In MATLAB: bwperim
, the more round the object.")
14 Binary object features Thinness ratio: Often used as a measure of roundness. The higher the thinness ratio (as it approaches 1), the more round the object. Its inverse is sometimes called irregularity or compactness ratio.
.")
15 Binary object features Eccentricity: The ratio of the major and minor axes of the object (A/B).

16 Binary object features Aspect ratio: The ratio of the major and minor axes of the object. Elongatedness (a/b):
17 Binary object features Moments: The 2D moment of order (p + q) of a digital image f(x, y) is defined as:
18 Binary object features Central moments: Translation-invariant equivalent of moments.
19 Binary object features Normalized central moments:
20 Binary object features RST-invariant moments [Hu, 1962]:
21 Binary object features MATLAB regionprops function Measures a set of properties for each labeled region L. One or more properties from the list in Table 18.2 (pp ) can be specified as parameters.
22 Boundary descriptors Contour-based (as opposed to region-based) Assumptions: The contour (or boundary) of an object can be represented in a convenient coordinate system (Cartesian, polar, or tangential) and rely exclusively on boundary pixels to describe the region or object. The pixels belonging to the boundary of the object (or region) can be traced, starting from any background pixel, using an algorithm known as bug tracing.
23 Boundary descriptors The bug tracing algorithm: repeat as soon as the conceptual bug crosses into a boundary pixel, it makes a left turn and moves to the next pixel; if that pixel is a boundary pixel, the bug makes another left turn; otherwise, it turns right; until the bug is back to the starting point. As the conceptual bug follows the contour, it builds a list of the coordinates of the boundary pixels being visited.
24 Boundary descriptors Example 18.2 The bug tracing algorithm in MATLAB (bwtraceboundary):

25 Boundary descriptors Example 18.3 Boundary tracing in MATLAB (bwboundaries):
26 Chain code, Freeman code, and shape number A chain code is a boundary representation technique by which a contour is represented as a sequence of straight-line segments of specified length (usually 1) and direction. The simplest chain code mechanism (crack code) consists of assigning a number to the direction followed by a bug tracking algorithm as follows: right (0), down (1), left (2), and up (3). Assuming that the total number of boundary points is p (the perimeter of the contour), the array C, where C(p) = 0, 1, 2, 3, contains the chain code of the boundary.



27 Chain code, Freeman code, and shape number Freeman code: a modified version of the basic chain code, using eight directions instead of four. Example:

28 Chain code, Freeman code, and shape number Shape number: normalized, rotation-invariant, equivalent of the chain code.
29 Signatures 1D representation of a boundary, usually obtained by representing the boundary in a polar coordinate system and computing the distance r between each pixel along the boundary and the centroid of the region, and the angle θ subtended between a straight line connecting the boundary pixel to the centroid and a horizontal reference. The resulting plot provides a concise representation of the boundary, that is RT-invariant, but not scaling-invariant.
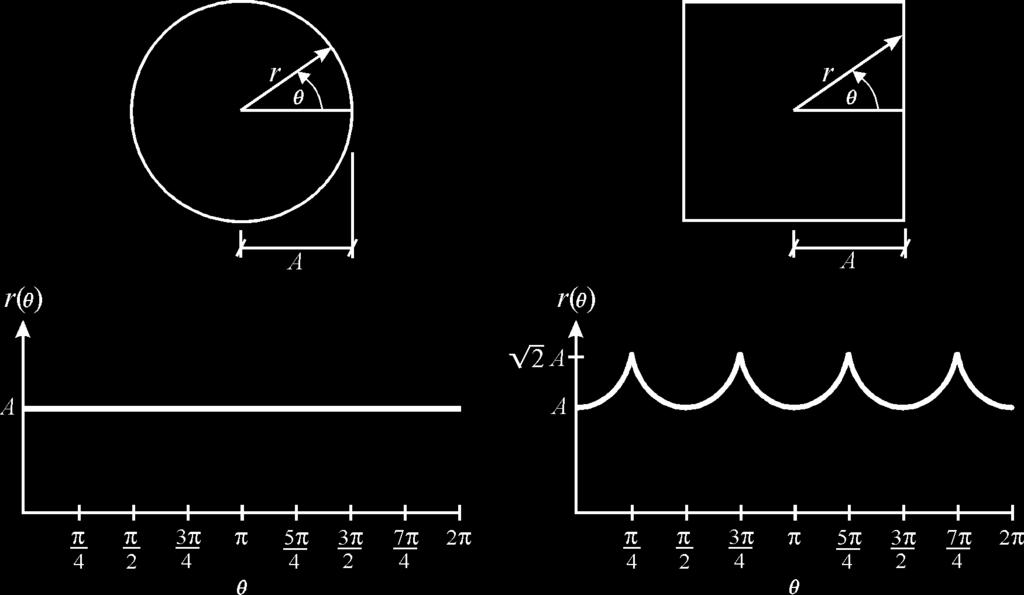
30 Signatures Examples:

31 Signatures Effects of noise:
32 Fourier descriptors Basic idea: to traverse the pixels belonging to a boundary, starting from an arbitrary point, and record their coordinates. Each value in the resulting list of coordinate pairs (x 0,y 0 ), (x 1,y 1 ),, (x K-1, y K-1 ) is then interpreted as a complex number x k + j y k, for k = 0, 1,, K-1. The Discrete Fourier Transform (DFT) of this list of complex numbers is the Fourier descriptor of the boundary. The inverse DFT restores the original boundary.

33 Fourier descriptors Basic idea
34 Fourier descriptors Interesting property: contour can be encoded using very few values (coefficients). Example 18.4:
35 Histogram-based features Average gray value:
36 Histogram-based features Standard deviation: Skew:
37 Histogram-based features Energy: Entropy:
38 Texture features Texture can be a powerful descriptor of an image (or one of its regions). Although there is not a universally agreed upon definition of texture, image processing techniques usually associate the notion of texture with image (or region) properties such as smoothness (or its opposite, roughness), coarseness, and regularity.
39 Texture features Texture examples:
40 Texture features Texture Example 18.5:

 Displacement")
41 Texture features Gray-level co-occurrence matrix (GLCM) Displacement vector: Example [d=(0,1)]:

 Another")
42 Texture features Gray-level co-occurrence matrix (GLCM) Another example [d=(1,0)]:
43 Texture features Normalized GLCM and associated features:
44 Texture features Texture descriptors based on GLCM Example 18.6:
45 Hands-on Tutorial 18.1: Feature extraction and representation (page 470)
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Lecture 8 Object Descriptors
 Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Lecture 8 Object Descriptors Azadeh Fakhrzadeh Centre for Image Analysis Swedish University of Agricultural Sciences Uppsala University 2 Reading instructions Chapter 11.1 11.4 in G-W Azadeh Fakhrzadeh
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Digital Image Processing
 Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Digital Image Processing Part 9: Representation and Description AASS Learning Systems Lab, Dep. Teknik Room T1209 (Fr, 11-12 o'clock) achim.lilienthal@oru.se Course Book Chapter 11 2011-05-17 Contents
Image and Multidimensional Signal Processing
 Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Image and Multidimensional Signal Processing Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ Representation and Description 2 Representation and
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
- Low-level image processing Image enhancement, restoration, transformation
 () Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
() Representation and Description - Low-level image processing enhancement, restoration, transformation Enhancement Enhanced Restoration/ Transformation Restored/ Transformed - Mid-level image processing
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Lecture 18 Representation and description I. 2. Boundary descriptors
 Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
Lecture 18 Representation and description I 1. Boundary representation 2. Boundary descriptors What is representation What is representation After segmentation, we obtain binary image with interested regions
CS443: Digital Imaging and Multimedia Binary Image Analysis. Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
CS443: Digital Imaging and Multimedia Binary Image Analysis Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding
Ulrik Söderström 21 Feb Representation and description
 Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Ulrik Söderström ulrik.soderstrom@tfe.umu.se 2 Feb 207 Representation and description Representation and description Representation involves making object definitions more suitable for computer interpretations
Chapter 11 Representation & Description
 Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
Chapter 11 Representation & Description The results of segmentation is a set of regions. Regions have then to be represented and described. Two main ways of representing a region: - external characteristics
ECEN 447 Digital Image Processing
 ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
ECEN 447 Digital Image Processing Lecture 8: Segmentation and Description Ulisses Braga-Neto ECE Department Texas A&M University Image Segmentation and Description Image segmentation and description are
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
9 length of contour = no. of horizontal and vertical components + ( 2 no. of diagonal components) diameter of boundary B
 diameter of boundary B") 8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
8. Boundary Descriptor 8.. Some Simple Descriptors length of contour : simplest descriptor - chain-coded curve 9 length of contour no. of horiontal and vertical components ( no. of diagonal components
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Image representation. 1. Introduction
 Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Image representation Introduction Representation schemes Chain codes Polygonal approximations The skeleton of a region Boundary descriptors Some simple descriptors Shape numbers Fourier descriptors Moments
Digital Image Processing Chapter 11: Image Description and Representation
 Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Digital Image Processing Chapter 11: Image Description and Representation Image Representation and Description? Objective: To represent and describe information embedded in an image in other forms that
Region-based Segmentation
 Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
Region-based Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) to obtain a compact representation. Applications: Finding tumors, veins, etc.
CS534 Introduction to Computer Vision Binary Image Analysis. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
CS534 Introduction to Computer Vision Binary Image Analysis Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines A Simple Machine Vision System Image segmentation by thresholding Digital
IN5520 Digital Image Analysis. Two old exams. Practical information for any written exam Exam 4300/9305, Fritz Albregtsen
 IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
IN5520 Digital Image Analysis Two old exams Practical information for any written exam Exam 4300/9305, 2016 Exam 4300/9305, 2017 Fritz Albregtsen 27.11.2018 F13 27.11.18 IN 5520 1 Practical information
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
Texture. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors. Frequency Descriptors
 Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
Texture The most fundamental question is: How can we measure texture, i.e., how can we quantitatively distinguish between different textures? Of course it is not enough to look at the intensity of individual
4 Parametrization of closed curves and surfaces
 4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
4 Parametrization of closed curves and surfaces Parametrically deformable models give rise to the question of obtaining parametrical descriptions of given pixel or voxel based object contours or surfaces,
Pattern recognition. Classification/Clustering GW Chapter 12 (some concepts) Textures
 Textures") Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Generic Fourier Descriptor for Shape-based Image Retrieval
 1 Generic Fourier Descriptor for Shape-based Image Retrieval Dengsheng Zhang, Guojun Lu Gippsland School of Comp. & Info Tech Monash University Churchill, VIC 3842 Australia dengsheng.zhang@infotech.monash.edu.au
1 Generic Fourier Descriptor for Shape-based Image Retrieval Dengsheng Zhang, Guojun Lu Gippsland School of Comp. & Info Tech Monash University Churchill, VIC 3842 Australia dengsheng.zhang@infotech.monash.edu.au
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
A Study on Feature Extraction Techniques in Image Processing
 International Journal of Computer Sciences and Engineering Open Access Review Paper Volume-4, Special Issue-7, Dec 2016 ISSN: 2347-2693 A Study on Feature Extraction Techniques in Image Processing Shrabani
International Journal of Computer Sciences and Engineering Open Access Review Paper Volume-4, Special Issue-7, Dec 2016 ISSN: 2347-2693 A Study on Feature Extraction Techniques in Image Processing Shrabani
Texture Analysis of Painted Strokes 1) Martin Lettner, Paul Kammerer, Robert Sablatnig
 Martin Lettner, Paul Kammerer, Robert Sablatnig") Texture Analysis of Painted Strokes 1) Martin Lettner, Paul Kammerer, Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image Processing
Texture Analysis of Painted Strokes 1) Martin Lettner, Paul Kammerer, Robert Sablatnig Vienna University of Technology, Institute of Computer Aided Automation, Pattern Recognition and Image Processing
Digital Image Processing. Lecture # 15 Image Segmentation & Texture
 Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Digital Image Processing Lecture # 15 Image Segmentation & Texture 1 Image Segmentation Image Segmentation Group similar components (such as, pixels in an image, image frames in a video) Applications:
Anne Solberg
 INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
INF 4300 Digital Image Analysis OBJECT REPRESENTATION Anne Solberg 26.09.2012 26.09.2011 INF 4300 1 Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1
Machine learning Pattern recognition. Classification/Clustering GW Chapter 12 (some concepts) Textures
 Textures") Machine learning Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class:
Machine learning Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class:
OBJECT DESCRIPTION - FEATURE EXTRACTION
 INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
INF 4300 Digital Image Analysis OBJECT DESCRIPTION - FEATURE EXTRACTION Fritz Albregtsen 1.10.011 F06 1.10.011 INF 4300 1 Today We go through G&W section 11. Boundary Descriptors G&W section 11.3 Regional
VC 11/12 T14 Visual Feature Extraction
 VC 11/12 T14 Visual Feature Extraction Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Feature Vectors Colour Texture
VC 11/12 T14 Visual Feature Extraction Mestrado em Ciência de Computadores Mestrado Integrado em Engenharia de Redes e Sistemas Informáticos Miguel Tavares Coimbra Outline Feature Vectors Colour Texture
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Multimedia Information Retrieval
 Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Multimedia Information Retrieval Prof Stefan Rüger Multimedia and Information Systems Knowledge Media Institute The Open University http://kmi.open.ac.uk/mmis Why content-based? Actually, what is content-based
Shape description and modelling
 COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
COMP3204/COMP6223: Computer Vision Shape description and modelling Jonathon Hare jsh2@ecs.soton.ac.uk Extracting features from shapes represented by connected components Recap: Connected Component A connected
Biomedical Image Processing
 Biomedical Image Processing Jason Thong Gabriel Grant 1 2 Motivation from the Medical Perspective MRI, CT and other biomedical imaging devices were designed to assist doctors in their diagnosis and treatment
Biomedical Image Processing Jason Thong Gabriel Grant 1 2 Motivation from the Medical Perspective MRI, CT and other biomedical imaging devices were designed to assist doctors in their diagnosis and treatment
FROM PIXELS TO REGIONS
 Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Analysis OBJECT REPRESENTATION FROM PIXELS TO REGIONS Fritz Albregtsen Today G & W Ch. 11.1 1 Representation Curriculum includes lecture notes. We cover the following: 11.1.1 Boundary following
Digital Image Processing
 Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Digital Image Processing Third Edition Rafael C. Gonzalez University of Tennessee Richard E. Woods MedData Interactive PEARSON Prentice Hall Pearson Education International Contents Preface xv Acknowledgments
Vocabulary Unit 2-3: Linear Functions & Healthy Lifestyles. Scale model a three dimensional model that is similar to a three dimensional object.
 Scale a scale is the ratio of any length in a scale drawing to the corresponding actual length. The lengths may be in different units. Scale drawing a drawing that is similar to an actual object or place.
Scale a scale is the ratio of any length in a scale drawing to the corresponding actual length. The lengths may be in different units. Scale drawing a drawing that is similar to an actual object or place.
SUMMARY PART I. What is texture? Uses for texture analysis. Computing texture images. Using variance estimates. INF 4300 Digital Image Analysis
 INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
INF 4 Digital Image Analysis SUMMARY PART I Fritz Albregtsen 4.. F 4.. INF 4 What is texture? Intuitively obvious, but no precise definition exists fine, coarse, grained, smooth etc Texture consists of
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I)
") Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Classification and Generation of 3D Discrete Curves
 Applied Mathematical Sciences, Vol. 1, 2007, no. 57, 2805-2825 Classification and Generation of 3D Discrete Curves Ernesto Bribiesca Departamento de Ciencias de la Computación Instituto de Investigaciones
Applied Mathematical Sciences, Vol. 1, 2007, no. 57, 2805-2825 Classification and Generation of 3D Discrete Curves Ernesto Bribiesca Departamento de Ciencias de la Computación Instituto de Investigaciones
Lecture 7: Most Common Edge Detectors
 #1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
#1 Lecture 7: Most Common Edge Detectors Saad Bedros sbedros@umn.edu Edge Detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT
 CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
CHAPTER 2 TEXTURE CLASSIFICATION METHODS GRAY LEVEL CO-OCCURRENCE MATRIX AND TEXTURE UNIT 2.1 BRIEF OUTLINE The classification of digital imagery is to extract useful thematic information which is one
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Schedule for Rest of Semester
 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
COMPUTER AND ROBOT VISION
 VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
VOLUME COMPUTER AND ROBOT VISION Robert M. Haralick University of Washington Linda G. Shapiro University of Washington A^ ADDISON-WESLEY PUBLISHING COMPANY Reading, Massachusetts Menlo Park, California
Afdeling Toegepaste Wiskunde/ Division of Applied Mathematics Representation and description(skeletonization, shape numbers) SLIDE 1/16
 SLIDE 1/16") Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
Representation and description(skeletonization, shape numbers) SLIDE 1/16 Chapter 11: Representation and Description Asegmentedregioncanberepresentedby { boundarypixels internal pixels When shape is important,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Image retrieval based on region shape similarity
 Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
Image retrieval based on region shape similarity Cheng Chang Liu Wenyin Hongjiang Zhang Microsoft Research China, 49 Zhichun Road, Beijing 8, China {wyliu, hjzhang}@microsoft.com ABSTRACT This paper presents
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 43 / INF 935 Digital image analysis Date: Thursday December 4, 4 Exam hours: 4.3-8.3 (4 hours) Number of pages: 6 pages Enclosures:
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 43 / INF 935 Digital image analysis Date: Thursday December 4, 4 Exam hours: 4.3-8.3 (4 hours) Number of pages: 6 pages Enclosures:
Feature extraction. Bi-Histogram Binarization Entropy. What is texture Texture primitives. Filter banks 2D Fourier Transform Wavlet maxima points
 Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
Feature extraction Bi-Histogram Binarization Entropy What is texture Texture primitives Filter banks 2D Fourier Transform Wavlet maxima points Edge detection Image gradient Mask operators Feature space
 DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
DEPARTMENT OF ELECTRONICS AND COMMUNICATION ENGINEERING DS7201 ADVANCED DIGITAL IMAGE PROCESSING II M.E (C.S) QUESTION BANK UNIT I 1. Write the differences between photopic and scotopic vision? 2. What
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Content Based Image Retrieval
 Content Based Image Retrieval R. Venkatesh Babu Outline What is CBIR Approaches Features for content based image retrieval Global Local Hybrid Similarity measure Trtaditional Image Retrieval Traditional
Content Based Image Retrieval R. Venkatesh Babu Outline What is CBIR Approaches Features for content based image retrieval Global Local Hybrid Similarity measure Trtaditional Image Retrieval Traditional
Pattern recognition. Classification/Clustering GW Chapter 12 (some concepts) Textures
 Textures") Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
Pattern recognition Classification/Clustering GW Chapter 12 (some concepts) Textures Patterns and pattern classes Pattern: arrangement of descriptors Descriptors: features Patten class: family of patterns
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection
 A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
A Computer Vision System for Graphical Pattern Recognition and Semantic Object Detection Tudor Barbu Institute of Computer Science, Iaşi, Romania Abstract We have focused on a set of problems related to
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/05 TEXTURE ANALYSIS
 ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
ECE 176 Digital Image Processing Handout #14 Pamela Cosman 4/29/ TEXTURE ANALYSIS Texture analysis is covered very briefly in Gonzalez and Woods, pages 66 671. This handout is intended to supplement that
Analysis of Irregularly Shaped Texture Regions 1
 Computer Vision and Image Understanding 84, 62 76 (2001) doi:10.1006/cviu.2001.0941, available online at http://www.idealibrary.com on Analysis of Irregularly Shaped Texture Regions 1 Pedro García-Sevilla
Computer Vision and Image Understanding 84, 62 76 (2001) doi:10.1006/cviu.2001.0941, available online at http://www.idealibrary.com on Analysis of Irregularly Shaped Texture Regions 1 Pedro García-Sevilla
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 02 130124 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Basics Image Formation Image Processing 3 Intelligent
COMP_4190 Artificial Intelligence Computer Vision. Computer Vision. Levels of Abstraction. Digital Images
 COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
COMP_49 Artificial Intelligence Computer Vision Jacky Baltes Department of Computer Science University of Manitoba Winnipeg, Manitoba Canada, RT N jacky@cs.umanitoba.ca http://www.cs.umanitoba.ca/~jacky
Texture Segmentation and Classification in Biomedical Image Processing
 Texture Segmentation and Classification in Biomedical Image Processing Aleš Procházka and Andrea Gavlasová Department of Computing and Control Engineering Institute of Chemical Technology in Prague Technická
Texture Segmentation and Classification in Biomedical Image Processing Aleš Procházka and Andrea Gavlasová Department of Computing and Control Engineering Institute of Chemical Technology in Prague Technická
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
A Vertex Chain Code Approach for Image Recognition
 A Vertex Chain Code Approach for Image Recognition Abdel-Badeeh M. Salem, Adel A. Sewisy, Usama A. Elyan Faculty of Computer and Information Sciences, Assiut University, Assiut, Egypt, usama471@yahoo.com,
A Vertex Chain Code Approach for Image Recognition Abdel-Badeeh M. Salem, Adel A. Sewisy, Usama A. Elyan Faculty of Computer and Information Sciences, Assiut University, Assiut, Egypt, usama471@yahoo.com,
The Evolution and Trend of Chain Code Scheme
 The Evolution and Trend of Chain Scheme 1 Lili Ayu Wulandhari, 2 Habibolah Haron Department of Modelling and Industrial Computing Faculty of Computer Science and Information Systems Universiti Teknologi
The Evolution and Trend of Chain Scheme 1 Lili Ayu Wulandhari, 2 Habibolah Haron Department of Modelling and Industrial Computing Faculty of Computer Science and Information Systems Universiti Teknologi
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
MPEG-7 Visual shape descriptors
 MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
MPEG-7 Visual shape descriptors Miroslaw Bober presented by Peter Tylka Seminar on scientific soft skills 22.3.2012 Presentation Outline Presentation Outline Introduction to problem Shape spectrum - 3D
HAND-GESTURE BASED FILM RESTORATION
 HAND-GESTURE BASED FILM RESTORATION Attila Licsár University of Veszprém, Department of Image Processing and Neurocomputing,H-8200 Veszprém, Egyetem u. 0, Hungary Email: licsara@freemail.hu Tamás Szirányi
HAND-GESTURE BASED FILM RESTORATION Attila Licsár University of Veszprém, Department of Image Processing and Neurocomputing,H-8200 Veszprém, Egyetem u. 0, Hungary Email: licsara@freemail.hu Tamás Szirányi
Dietrich Paulus Joachim Hornegger. Pattern Recognition of Images and Speech in C++
 Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
Dietrich Paulus Joachim Hornegger Pattern Recognition of Images and Speech in C++ To Dorothea, Belinda, and Dominik In the text we use the following names which are protected, trademarks owned by a company
ENHANCED GENERIC FOURIER DESCRIPTORS FOR OBJECT-BASED IMAGE RETRIEVAL
 ENHANCED GENERIC FOURIER DESCRIPTORS FOR OBJECT-BASED IMAGE RETRIEVAL Dengsheng Zhang and Guojun Lu Gippsland School of Computing and Info Tech Monash University Churchill, Victoria 3842 dengsheng.zhang,
ENHANCED GENERIC FOURIER DESCRIPTORS FOR OBJECT-BASED IMAGE RETRIEVAL Dengsheng Zhang and Guojun Lu Gippsland School of Computing and Info Tech Monash University Churchill, Victoria 3842 dengsheng.zhang,
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
Image Segmentation Image Thresholds Edge-detection Edge-detection, the 1 st derivative Edge-detection, the 2 nd derivative Horizontal Edges Vertical
 Image Segmentation Image Thresholds Edge-detection Edge-detection, the 1 st derivative Edge-detection, the 2 nd derivative Horizontal Edges Vertical Edges Diagonal Edges Hough Transform 6.1 Image segmentation
Image Segmentation Image Thresholds Edge-detection Edge-detection, the 1 st derivative Edge-detection, the 2 nd derivative Horizontal Edges Vertical Edges Diagonal Edges Hough Transform 6.1 Image segmentation
Analysis of Image and Video Using Color, Texture and Shape Features for Object Identification
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
Analysis of Binary Images
 Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Analysis of Binary Images Introduction to Computer Vision CSE 52 Lecture 7 CSE52, Spr 07 The appearance of colors Color appearance is strongly affected by (at least): Spectrum of lighting striking the
Get High Precision in Content-Based Image Retrieval using Combination of Color, Texture and Shape Features
 Get High Precision in Content-Based Image Retrieval using Combination of Color, Texture and Shape Features 1 Mr. Rikin Thakkar, 2 Ms. Ompriya Kale 1 Department of Computer engineering, 1 LJ Institute of
Get High Precision in Content-Based Image Retrieval using Combination of Color, Texture and Shape Features 1 Mr. Rikin Thakkar, 2 Ms. Ompriya Kale 1 Department of Computer engineering, 1 LJ Institute of
An Introduction to Content Based Image Retrieval
 CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
CHAPTER -1 An Introduction to Content Based Image Retrieval 1.1 Introduction With the advancement in internet and multimedia technologies, a huge amount of multimedia data in the form of audio, video and
CLASSIFICATION OF BOUNDARY AND REGION SHAPES USING HU-MOMENT INVARIANTS
 CLASSIFICATION OF BOUNDARY AND REGION SHAPES USING HU-MOMENT INVARIANTS B.Vanajakshi Department of Electronics & Communications Engg. Assoc.prof. Sri Viveka Institute of Technology Vijayawada, India E-mail:
CLASSIFICATION OF BOUNDARY AND REGION SHAPES USING HU-MOMENT INVARIANTS B.Vanajakshi Department of Electronics & Communications Engg. Assoc.prof. Sri Viveka Institute of Technology Vijayawada, India E-mail:
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
IRIS SEGMENTATION OF NON-IDEAL IMAGES
 IRIS SEGMENTATION OF NON-IDEAL IMAGES William S. Weld St. Lawrence University Computer Science Department Canton, NY 13617 Xiaojun Qi, Ph.D Utah State University Computer Science Department Logan, UT 84322
IRIS SEGMENTATION OF NON-IDEAL IMAGES William S. Weld St. Lawrence University Computer Science Department Canton, NY 13617 Xiaojun Qi, Ph.D Utah State University Computer Science Department Logan, UT 84322
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 10 Segmentation 14/02/27 http://www.ee.unlv.edu/~b1morris/ecg782/
ELEC Dr Reji Mathew Electrical Engineering UNSW
 ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
ELEC 4622 Dr Reji Mathew Electrical Engineering UNSW Review of Motion Modelling and Estimation Introduction to Motion Modelling & Estimation Forward Motion Backward Motion Block Motion Estimation Motion
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
N.Priya. Keywords Compass mask, Threshold, Morphological Operators, Statistical Measures, Text extraction
 Volume, Issue 8, August ISSN: 77 8X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Combined Edge-Based Text
Volume, Issue 8, August ISSN: 77 8X International Journal of Advanced Research in Computer Science and Software Engineering Research Paper Available online at: www.ijarcsse.com A Combined Edge-Based Text
Fourier Descriptors. Properties and Utility in Leaf Classification. ECE 533 Fall Tyler Karrels
 Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
Fourier Descriptors Properties and Utility in Leaf Classification ECE 533 Fall 2006 Tyler Karrels Introduction Now that large-scale data storage is feasible due to the large capacity and low cost of hard
Processing of binary images
 Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Binary Image Processing Tuesday, 14/02/2017 ntonis rgyros e-mail: argyros@csd.uoc.gr 1 Today From gray level to binary images Processing of binary images Mathematical morphology 2 Computer Vision, Spring
Image features. Image Features
 Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Image features Image features, such as edges and interest points, provide rich information on the image content. They correspond to local regions in the image and are fundamental in many applications in
Morphological Image Processing
 Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
Morphological Image Processing Ranga Rodrigo October 9, 29 Outline Contents Preliminaries 2 Dilation and Erosion 3 2. Dilation.............................................. 3 2.2 Erosion..............................................
MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION OF TEXTURES
 International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
International Journal of Computer Science and Communication Vol. 3, No. 1, January-June 2012, pp. 125-130 MORPHOLOGICAL BOUNDARY BASED SHAPE REPRESENTATION SCHEMES ON MOMENT INVARIANTS FOR CLASSIFICATION
Ch 22 Inspection Technologies
 Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Ch 22 Inspection Technologies Sections: 1. Inspection Metrology 2. Contact vs. Noncontact Inspection Techniques 3. Conventional Measuring and Gaging Techniques 4. Coordinate Measuring Machines 5. Surface
Binary Image Processing. Introduction to Computer Vision CSE 152 Lecture 5
 Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.
Binary Image Processing CSE 152 Lecture 5 Announcements Homework 2 is due Apr 25, 11:59 PM Reading: Szeliski, Chapter 3 Image processing, Section 3.3 More neighborhood operators Binary System Summary 1.