Why study Computer Vision?
|
|
|
- Rolf McCormick
- 6 years ago
- Views:
Transcription
1 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what) movie post-processing face finding Various deep and attractive scientific mysteries how does object recognition work? Greater understanding of human vision Properties of Vision One can see the future Cricketers avoid being hit in the head There s a reflex --- when the right eye sees something going left, and the left eye sees something going right, move your head fast. Gannets pull their wings back at the last moment Gannets are diving birds; they must steer with their wings, but wings break unless pulled back at the moment of contact. Area of target over rate of change of area gives time to contact. 1
2 Properties of Vision 3D representations are easily constructed There are many different cues. Useful to humans (avoid bumping into things; planning a grasp; etc.) in computer vision (build models for movies). Cues include multiple views (motion, stereopsis) texture shading Properties of Vision People draw distinctions between what is seen Object recognition This could mean is this a fish or a bicycle? It could mean is this George Washington? It could mean is this poisonous or not? It could mean is this slippery or not? It could mean will this support my weight? Great mystery How to build programs that can draw useful distinctions based on image properties. 2
3 Part I: The Physics of Imaging How images are formed Cameras What a camera does How to tell where the camera was Light How to measure light What light does at surfaces How the brightness values we see in cameras are determined Color The underlying mechanisms of color How to describe it and measure it Part II: Early Vision in One Image Representing small patches of image For three reasons We wish to establish correspondence between (say) points in different images, so we need to describe the neighborhood of the points Sharp changes are important in practice --- known as edges Representing texture by giving some statistics of the different kinds of small patch present in the texture. Tigers have lots of bars, few spots Leopards are the other way 3
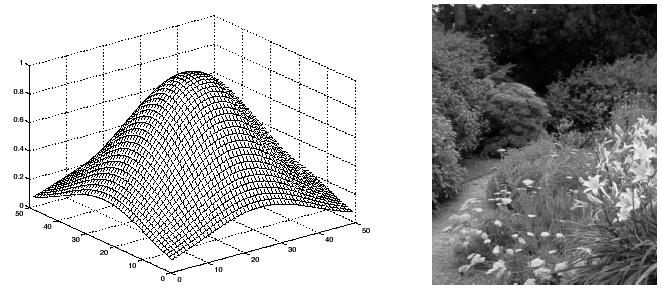
4 Representing an image patch Filter outputs essentially form a dot-product between a pattern and an image, while shifting the pattern across the image strong response -> image locally looks like the pattern e.g. derivatives measured by filtering with a kernel that looks like a big derivative (bright bar next to dark bar) Convolve this image To get this With this kernel 4

5 Texture Many objects are distinguished by their texture Tigers, cheetahs, grass, trees We represent texture with statistics of filter outputs For tigers, bar filters at a coarse scale respond strongly For cheetahs, spots at the same scale For grass, long narrow bars For the leaves of trees, extended spots Objects with different textures can be segmented The variation in textures is a cue to shape 5

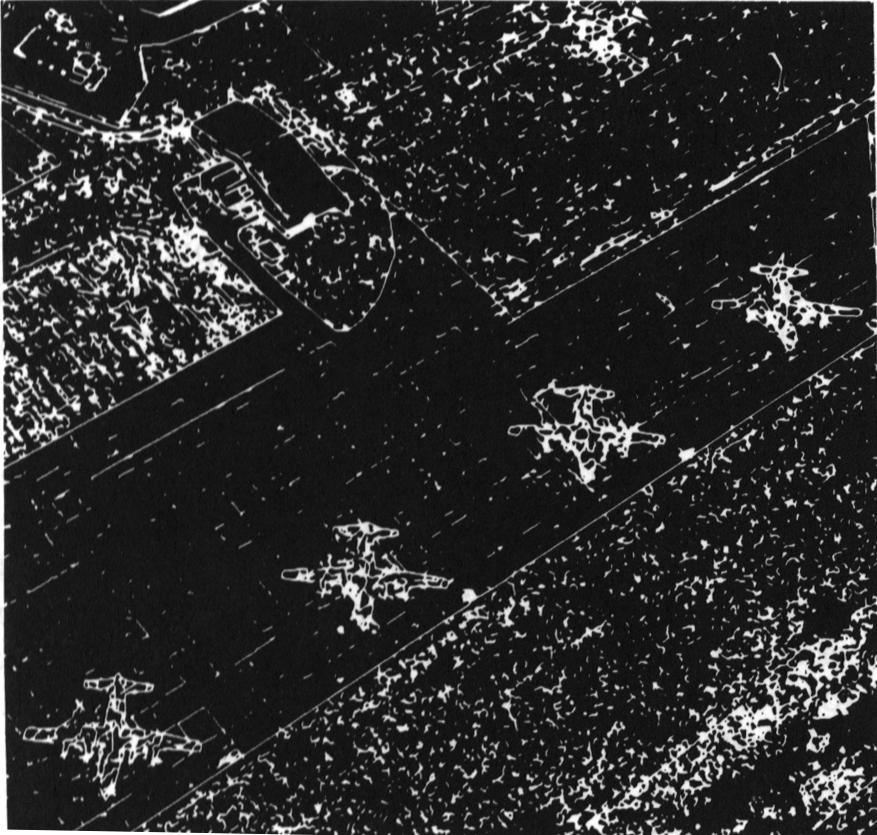
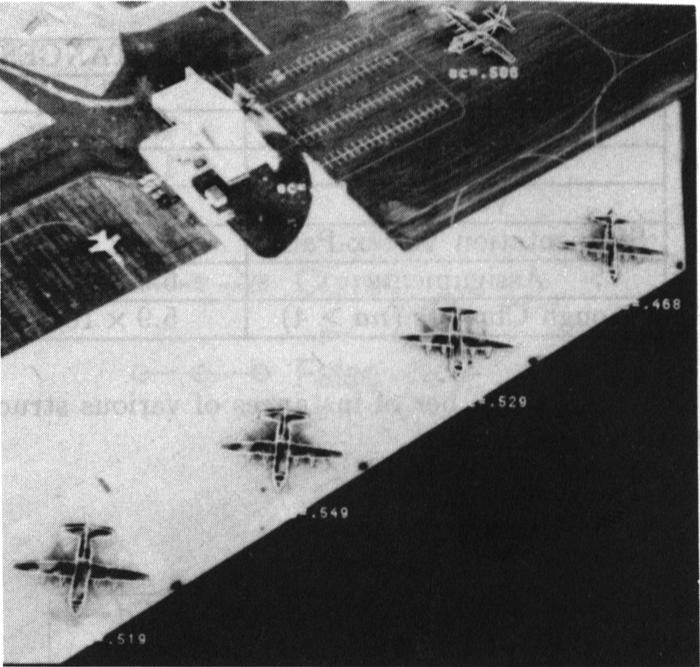
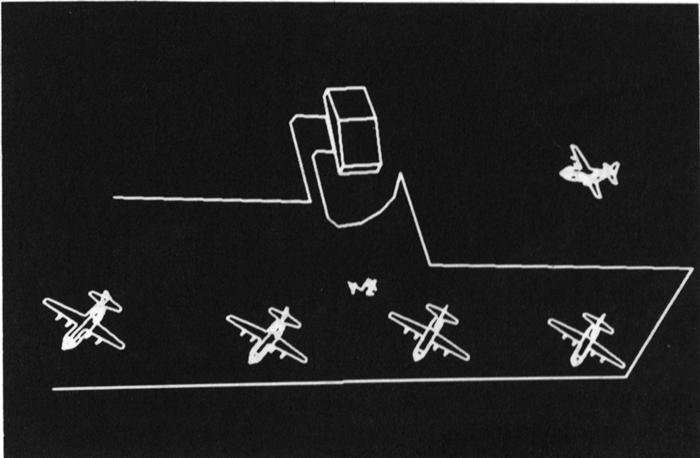
6 Shape from texture 6
7 Part III: Early Vision in Multiple Images The geometry of multiple views Where could it appear in camera 2 (3, etc.) given it was here in 1 (1 and 2, etc.)? Stereopsis What we know about the world from having 2 eyes Structure from motion What we know about the world from having many eyes or, more commonly, our eyes moving. Part IV: Mid-Level Vision Finding coherent structure so as to break the image or movie into big units Segmentation: Breaking images and videos into useful pieces E.g. finding video sequences that correspond to one shot E.g. finding image components that are coherent in internal appearance Tracking: Keeping track of a moving object through a long sequence of views 7
8 Part V: High Level Vision (Geometry) The relations between object geometry and image geometry Model based vision find the position and orientation of known objects Smooth surfaces and outlines how the outline of a curved object is formed, and what it looks like Aspect graphs how the outline of a curved object moves around as you view it from different directions Range data Part VI: High Level Vision (Probabilistic) Using classifiers and probability to recognize objects Templates and classifiers how to find objects that look the same from view to view with a classifier Relations break up objects into big, simple parts, find the parts with a classifier, and then reason about the relationships between the parts to find the object. Geometric templates from spatial relations extend this trick so that templates are formed from relations between much smaller parts 8
9 3D Reconstruction from multiple views Multiple views arise from stereo motion Strategy triangulate from distinct measurements of the same thing Issues Correspondence: which points in the images are projections of the same 3D point? The representation: what do we report? Noise: how do we get stable, accurate reports Part VII: Some Applications in Detail Finding images in large collections searching for pictures browsing collections of pictures Image based rendering often very difficult to produce models that look like real objects surface weathering, etc., create details that are hard to model Solution: make new pictures from old 9
10 Some applications of recognition Digital libraries Find me the pic of JFK and Marilyn Monroe embracing NCMEC Surveillance Warn me if there is a mugging in the grove HCI Do what I show you Military Shoot this, not that What are the problems in recognition? Which bits of image should be recognized together? Segmentation. How can objects be recognized without focusing on detail? Abstraction. How can objects with many free parameters be recognized? No popular name, but it s a crucial problem anyhow. How do we structure very large model bases? again, no popular name; abstraction and learning come into this 10

11 History History-II 11

12 Segmentation Which image components belong together? Belong together=lie on the same object Cues similar color similar texture not separated by contour form a suggestive shape when assembled 12
13 13
14 14

15 15

16 Matching templates Some objects are 2D patterns e.g. faces Build an explicit pattern matcher discount changes in illumination by using a parametric model changes in background are hard changes in pose are hard 16

17 Relations between templates e.g. find faces by finding eyes, nose, mouth finding assembly of the three that has the right relations 17

18 18
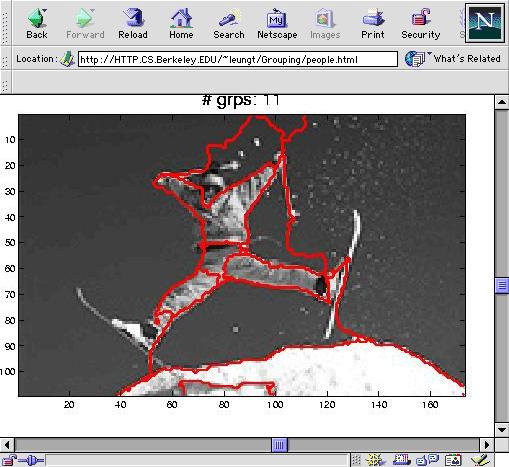
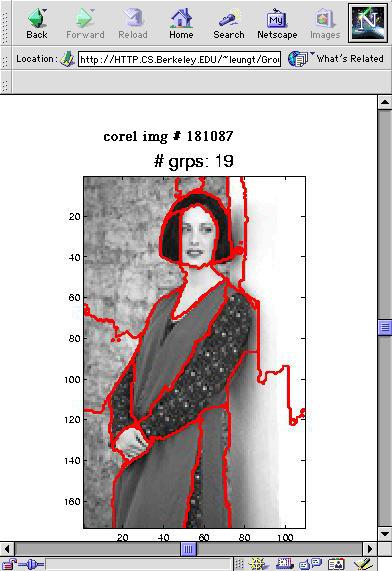
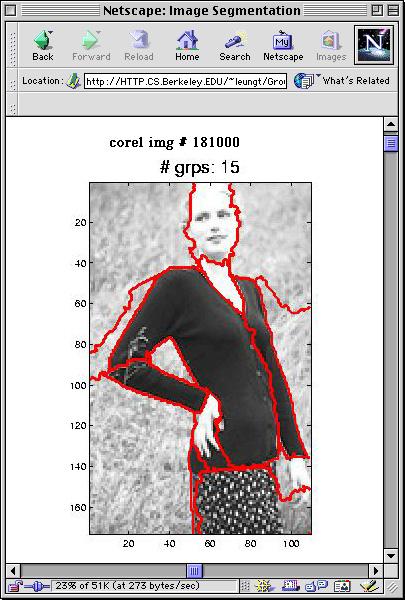
19 Representing the 3D world Assemblies of primitives fit parametric forms Issues what primitives? uniqueness of representation few objects are actual primitives Indexed collection of images use interpolation to predict appearance between images Issues occlusion is a mild nuisance structuring the collection can be tricky People Skin is characteristic; clothing hard to segment hence, people wearing little clothing Finding body segments: finding skin-like (color, texture) regions that have nearly straight, nearly parallel boundaries Grouping process constructed by hand, tuned by hand using small dataset. When a sufficiently large group is found, assert a person is present 19















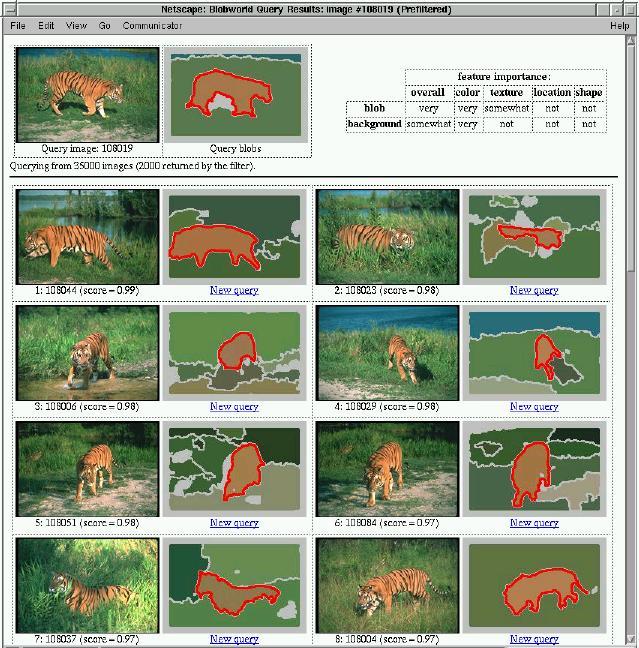
20 Horse grouper Returned data set 20
 kinematic models etc.")
21 Tracking Use a model to predict next position and refine using next image Model: simple dynamic models (second order dynamics) kinematic models etc. Face tracking and eye tracking now work rather well The nasty likelihood 21
22 About this class Image formation, relation between images and the world Features: color, edges, corners, lines, motion flow, histograms Segmentation and grouping Tracking, motion estimation Recognition and learning 22
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Introduction. Prof. Kyoung Mu Lee SoEECS, Seoul National University
 Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
Introduction to Computer Vision MARCH 2018
 Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS543 - Computer Vision. D.A. Forsyth
 CS543 - Computer Vision D.A. Forsyth Administrative matters Instructor: D.A. Forsyth, 3310 Siebel Hall, daf@uiuc.edu Office hours: 14h30-15h30 Tue, Thur, or walk in TA: Ali Farhadi, afarhad2@uiuc.edu Evaluation:
CS543 - Computer Vision D.A. Forsyth Administrative matters Instructor: D.A. Forsyth, 3310 Siebel Hall, daf@uiuc.edu Office hours: 14h30-15h30 Tue, Thur, or walk in TA: Ali Farhadi, afarhad2@uiuc.edu Evaluation:
Depth. Common Classification Tasks. Example: AlexNet. Another Example: Inception. Another Example: Inception. Depth
 Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
Common Classification Tasks Recognition of individual objects/faces Analyze object-specific features (e.g., key points) Train with images from different viewing angles Recognition of object classes Analyze
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
(Refer Slide Time 00:17) Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)
 Welcome to the course on Digital Image Processing. (Refer Slide Time 00:22)") Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Digital Image Processing Prof. P. K. Biswas Department of Electronics and Electrical Communications Engineering Indian Institute of Technology, Kharagpur Module Number 01 Lecture Number 02 Application
Waleed Pervaiz CSE 352
 Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
Waleed Pervaiz CSE 352 Computer Vision is the technology that enables machines to see and obtain information from digital images. It is seen as an integral part of AI in fields such as pattern recognition
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Three-Dimensional Computer Vision
 \bshiaki Shirai Three-Dimensional Computer Vision With 313 Figures ' Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Table of Contents 1 Introduction 1 1.1 Three-Dimensional Computer Vision
\bshiaki Shirai Three-Dimensional Computer Vision With 313 Figures ' Springer-Verlag Berlin Heidelberg New York London Paris Tokyo Table of Contents 1 Introduction 1 1.1 Three-Dimensional Computer Vision
Final Exam Schedule. Final exam has been scheduled. 12:30 pm 3:00 pm, May 7. Location: INNOVA It will cover all the topics discussed in class
 Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Analysis of Image and Video Using Color, Texture and Shape Features for Object Identification
 IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
IOSR Journal of Computer Engineering (IOSR-JCE) e-issn: 2278-0661,p-ISSN: 2278-8727, Volume 16, Issue 6, Ver. VI (Nov Dec. 2014), PP 29-33 Analysis of Image and Video Using Color, Texture and Shape Features
Practice Exam Sample Solutions
 CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
Scaled representations
 Scaled representations Big bars (resp. spots, hands, etc.) and little bars are both interesting Stripes and hairs, say Inefficient to detect big bars with big filters And there is superfluous detail in
Scaled representations Big bars (resp. spots, hands, etc.) and little bars are both interesting Stripes and hairs, say Inefficient to detect big bars with big filters And there is superfluous detail in
Chapter 9 Object Tracking an Overview
 Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
Chapter 9 Object Tracking an Overview The output of the background subtraction algorithm, described in the previous chapter, is a classification (segmentation) of pixels into foreground pixels (those belonging
CS201: Computer Vision Introduction to Tracking
 CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
CS201: Computer Vision Introduction to Tracking John Magee 18 November 2014 Slides courtesy of: Diane H. Theriault Question of the Day How can we represent and use motion in images? 1 What is Motion? Change
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
Last update: May 4, Vision. CMSC 421: Chapter 24. CMSC 421: Chapter 24 1
 Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
Last update: May 4, 200 Vision CMSC 42: Chapter 24 CMSC 42: Chapter 24 Outline Perception generally Image formation Early vision 2D D Object recognition CMSC 42: Chapter 24 2 Perception generally Stimulus
A Survey of Light Source Detection Methods
 A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
A Survey of Light Source Detection Methods Nathan Funk University of Alberta Mini-Project for CMPUT 603 November 30, 2003 Abstract This paper provides an overview of the most prominent techniques for light
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Computer Vision: Making machines see
 Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Computer Vision: Making machines see Roberto Cipolla Department of Engineering http://www.eng.cam.ac.uk/~cipolla/people.html http://www.toshiba.eu/eu/cambridge-research- Laboratory/ Vision: what is where
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
CS 534: Computer Vision Segmentation and Perceptual Grouping Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Outlines Mid-level vision What is segmentation Perceptual Grouping Segmentation
Chapter 7. Conclusions and Future Work
 Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Chapter 7 Conclusions and Future Work In this dissertation, we have presented a new way of analyzing a basic building block in computer graphics rendering algorithms the computational interaction between
Deep Learning for Virtual Shopping. Dr. Jürgen Sturm Group Leader RGB-D
 Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Deep Learning for Virtual Shopping Dr. Jürgen Sturm Group Leader RGB-D metaio GmbH Augmented Reality with the Metaio SDK: IKEA Catalogue App Metaio: Augmented Reality Metaio SDK for ios, Android and Windows
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
EE 264: Image Processing and Reconstruction. Image Motion Estimation I. EE 264: Image Processing and Reconstruction. Outline
 1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
1 Image Motion Estimation I 2 Outline 1. Introduction to Motion 2. Why Estimate Motion? 3. Global vs. Local Motion 4. Block Motion Estimation 5. Optical Flow Estimation Basics 6. Optical Flow Estimation
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Human Upper Body Pose Estimation in Static Images
 1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
1. Research Team Human Upper Body Pose Estimation in Static Images Project Leader: Graduate Students: Prof. Isaac Cohen, Computer Science Mun Wai Lee 2. Statement of Project Goals This goal of this project
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Computer Vision: Summary and Discussion
 12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
12/05/2011 Computer Vision: Summary and Discussion Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem Announcements Today is last day of regular class Second quiz on Wednesday (Dec 7
Complex Sensors: Cameras, Visual Sensing. The Robotics Primer (Ch. 9) ECE 497: Introduction to Mobile Robotics -Visual Sensors
 ECE 497: Introduction to Mobile Robotics -Visual Sensors") Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Complex Sensors: Cameras, Visual Sensing The Robotics Primer (Ch. 9) Bring your laptop and robot everyday DO NOT unplug the network cables from the desktop computers or the walls Tuesday s Quiz is on Visual
Computational Foundations of Cognitive Science
 Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
Computational Foundations of Cognitive Science Lecture 16: Models of Object Recognition Frank Keller School of Informatics University of Edinburgh keller@inf.ed.ac.uk February 23, 2010 Frank Keller Computational
IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues
 2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
2016 International Conference on Computational Science and Computational Intelligence IDE-3D: Predicting Indoor Depth Utilizing Geometric and Monocular Cues Taylor Ripke Department of Computer Science
0. Introduction: What is Computer Graphics? 1. Basics of scan conversion (line drawing) 2. Representing 2D curves
 2. Representing 2D curves") CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CSC 418/2504: Computer Graphics Course web site (includes course information sheet): http://www.dgp.toronto.edu/~elf Instructor: Eugene Fiume Office: BA 5266 Phone: 416 978 5472 (not a reliable way) Email:
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
An introduction to 3D image reconstruction and understanding concepts and ideas
 Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Introduction to 3D image reconstruction An introduction to 3D image reconstruction and understanding concepts and ideas Samuele Carli Martin Hellmich 5 febbraio 2013 1 icsc2013 Carli S. Hellmich M. (CERN)
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4
, Module 4") Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
Advanced Video Content Analysis and Video Compression (5LSH0), Module 4 Visual feature extraction Part I: Color and texture analysis Sveta Zinger Video Coding and Architectures Research group, TU/e ( s.zinger@tue.nl
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
HW2 due on Thursday. Face Recognition: Dimensionality Reduction. Biometrics CSE 190 Lecture 11. Perceptron Revisited: Linear Separators
 HW due on Thursday Face Recognition: Dimensionality Reduction Biometrics CSE 190 Lecture 11 CSE190, Winter 010 CSE190, Winter 010 Perceptron Revisited: Linear Separators Binary classification can be viewed
HW due on Thursday Face Recognition: Dimensionality Reduction Biometrics CSE 190 Lecture 11 CSE190, Winter 010 CSE190, Winter 010 Perceptron Revisited: Linear Separators Binary classification can be viewed
Announcements. Recognition (Part 3) Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test
 Model-Based Vision. A Rough Recognition Spectrum. Pose consistency. Recognition by Hypothesize and Test") Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Announcements (Part 3) CSE 152 Lecture 16 Homework 3 is due today, 11:59 PM Homework 4 will be assigned today Due Sat, Jun 4, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying
Shadows. COMP 575/770 Spring 2013
 Shadows COMP 575/770 Spring 2013 Shadows in Ray Tracing Shadows are important for realism Basic idea: figure out whether a point on an object is illuminated by a light source Easy for ray tracers Just
Shadows COMP 575/770 Spring 2013 Shadows in Ray Tracing Shadows are important for realism Basic idea: figure out whether a point on an object is illuminated by a light source Easy for ray tracers Just
Designing Applications that See Lecture 7: Object Recognition
 stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
stanford hci group / cs377s Designing Applications that See Lecture 7: Object Recognition Dan Maynes-Aminzade 29 January 2008 Designing Applications that See http://cs377s.stanford.edu Reminders Pick up
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Solution: filter the image, then subsample F 1 F 2. subsample blur subsample. blur
 Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Pyramids Gaussian pre-filtering Solution: filter the image, then subsample blur F 0 subsample blur subsample * F 0 H F 1 F 1 * H F 2 { Gaussian pyramid blur F 0 subsample blur subsample * F 0 H F 1 F 1
Recognition (Part 4) Introduction to Computer Vision CSE 152 Lecture 17
 Introduction to Computer Vision CSE 152 Lecture 17") Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
Recognition (Part 4) CSE 152 Lecture 17 Announcements Homework 5 is due June 9, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images
CHAPTER 5 GLOBAL AND LOCAL FEATURES FOR FACE RECOGNITION
 122 CHAPTER 5 GLOBAL AND LOCAL FEATURES FOR FACE RECOGNITION 5.1 INTRODUCTION Face recognition, means checking for the presence of a face from a database that contains many faces and could be performed
122 CHAPTER 5 GLOBAL AND LOCAL FEATURES FOR FACE RECOGNITION 5.1 INTRODUCTION Face recognition, means checking for the presence of a face from a database that contains many faces and could be performed
given B-spline surface. As described earlier, if the points at which curvature minimas or
 7.0 Results The objective of this research is to optimize the procedure of geometric trimming of any given B-spline surface. As described earlier, if the points at which curvature minimas or maximas occur
7.0 Results The objective of this research is to optimize the procedure of geometric trimming of any given B-spline surface. As described earlier, if the points at which curvature minimas or maximas occur
Lecture 24: More on Reflectance CAP 5415
 Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Lecture 24: More on Reflectance CAP 5415 Recovering Shape We ve talked about photometric stereo, where we assumed that a surface was diffuse Could calculate surface normals and albedo What if the surface
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who in turn adapted slides from Steve Seitz, Rick Szeliski,
Chapter 1- The Blender Interface
 Chapter 1- The Blender Interface The Blender Screen Years ago, when I first looked at Blender and read some tutorials I thought that this looked easy and made sense. After taking the program for a test
Chapter 1- The Blender Interface The Blender Screen Years ago, when I first looked at Blender and read some tutorials I thought that this looked easy and made sense. After taking the program for a test
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
Image Processing, Analysis and Machine Vision
 Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Image Processing, Analysis and Machine Vision Milan Sonka PhD University of Iowa Iowa City, USA Vaclav Hlavac PhD Czech Technical University Prague, Czech Republic and Roger Boyle DPhil, MBCS, CEng University
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Advance Shadow Edge Detection and Removal (ASEDR)
") International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
International Journal of Computational Intelligence Research ISSN 0973-1873 Volume 13, Number 2 (2017), pp. 253-259 Research India Publications http://www.ripublication.com Advance Shadow Edge Detection
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
Filtering, scale, orientation, localization, and texture. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Filtering, scale, orientation, localization, and texture Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Beyond edges we have talked a lot about edges while they are important, it
Filtering, scale, orientation, localization, and texture Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Beyond edges we have talked a lot about edges while they are important, it
Motion Estimation. There are three main types (or applications) of motion estimation:
 of motion estimation:") Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Members: D91922016 朱威達 R93922010 林聖凱 R93922044 謝俊瑋 Motion Estimation There are three main types (or applications) of motion estimation: Parametric motion (image alignment) The main idea of parametric motion
Computer Vision & Digital Image Processing. Image segmentation: thresholding
 Computer Vision & Digital Image Processing Image Segmentation: Thresholding Dr. D. J. Jackson Lecture 18-1 Image segmentation: thresholding Suppose an image f(y) is composed of several light objects on
Computer Vision & Digital Image Processing Image Segmentation: Thresholding Dr. D. J. Jackson Lecture 18-1 Image segmentation: thresholding Suppose an image f(y) is composed of several light objects on
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Does the Brain do Inverse Graphics?
 Does the Brain do Inverse Graphics? Geoffrey Hinton, Alex Krizhevsky, Navdeep Jaitly, Tijmen Tieleman & Yichuan Tang Department of Computer Science University of Toronto The representation used by the
Does the Brain do Inverse Graphics? Geoffrey Hinton, Alex Krizhevsky, Navdeep Jaitly, Tijmen Tieleman & Yichuan Tang Department of Computer Science University of Toronto The representation used by the
Tracking. Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association
 Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Tracking Establish where an object is, other aspects of state, using time sequence Biggest problem -- Data Association Key ideas Tracking by detection Tracking through flow Track by detection (simple form)
Subdivision Of Triangular Terrain Mesh Breckon, Chenney, Hobbs, Hoppe, Watts
 Subdivision Of Triangular Terrain Mesh Breckon, Chenney, Hobbs, Hoppe, Watts MSc Computer Games and Entertainment Maths & Graphics II 2013 Lecturer(s): FFL (with Gareth Edwards) Fractal Terrain Based on
Subdivision Of Triangular Terrain Mesh Breckon, Chenney, Hobbs, Hoppe, Watts MSc Computer Games and Entertainment Maths & Graphics II 2013 Lecturer(s): FFL (with Gareth Edwards) Fractal Terrain Based on
Introduction to Medical Imaging (5XSA0)
") 1 Introduction to Medical Imaging (5XSA0) Visual feature extraction Color and texture analysis Sveta Zinger ( s.zinger@tue.nl ) Introduction (1) Features What are features? Feature a piece of information
1 Introduction to Medical Imaging (5XSA0) Visual feature extraction Color and texture analysis Sveta Zinger ( s.zinger@tue.nl ) Introduction (1) Features What are features? Feature a piece of information
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Recall: Derivative of Gaussian Filter. Lecture 7: Correspondence Matching. Observe and Generalize. Observe and Generalize. Observe and Generalize
 Recall: Derivative of Gaussian Filter G x I x =di(x,y)/dx Lecture 7: Correspondence Matching Reading: T&V Section 7.2 I(x,y) G y convolve convolve I y =di(x,y)/dy Observe and Generalize Derivative of Gaussian
Recall: Derivative of Gaussian Filter G x I x =di(x,y)/dx Lecture 7: Correspondence Matching Reading: T&V Section 7.2 I(x,y) G y convolve convolve I y =di(x,y)/dy Observe and Generalize Derivative of Gaussian
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
09/11/2017. Morphological image processing. Morphological image processing. Morphological image processing. Morphological image processing (binary)
") Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Towards image analysis Goal: Describe the contents of an image, distinguishing meaningful information from irrelevant one. Perform suitable transformations of images so as to make explicit particular shape
Segmentation and Tracking of Partial Planar Templates
 Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Segmentation and Tracking of Partial Planar Templates Abdelsalam Masoud William Hoff Colorado School of Mines Colorado School of Mines Golden, CO 800 Golden, CO 800 amasoud@mines.edu whoff@mines.edu Abstract
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Binocular cues to depth PSY 310 Greg Francis. Lecture 21. Depth perception
 Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Binocular cues to depth PSY 310 Greg Francis Lecture 21 How to find the hidden word. Depth perception You can see depth in static images with just one eye (monocular) Pictorial cues However, motion and
Active Stereo Vision. COMP 4900D Winter 2012 Gerhard Roth
 Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Active Stereo Vision COMP 4900D Winter 2012 Gerhard Roth Why active sensors? Project our own texture using light (usually laser) This simplifies correspondence problem (much easier) Pluses Can handle different
Snakes, level sets and graphcuts. (Deformable models)
") INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
(Sample) Final Exam with brief answers
 Final Exam with brief answers") Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Name: Perm #: (Sample) Final Exam with brief answers CS/ECE 181B Intro to Computer Vision March 24, 2017 noon 3:00 pm This is a closed-book test. There are also a few pages of equations, etc. included
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Vision is inferential. (
 Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Announcements Final: Thursday, December 15, 8am, here. Review Session, Wednesday, Dec 14, 1pm, AV Williams 4424. Review sheet with practice problems on-line. Hints for Final Focus on core techniques/ideas:
Applications. Foreground / background segmentation Finding skin-colored regions. Finding the moving objects. Intelligent scissors
 Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Segmentation I Goal Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Applications Intelligent
Face Recognition Technology Based On Image Processing Chen Xin, Yajuan Li, Zhimin Tian
 4th International Conference on Machinery, Materials and Computing Technology (ICMMCT 2016) Face Recognition Technology Based On Image Processing Chen Xin, Yajuan Li, Zhimin Tian Hebei Engineering and
4th International Conference on Machinery, Materials and Computing Technology (ICMMCT 2016) Face Recognition Technology Based On Image Processing Chen Xin, Yajuan Li, Zhimin Tian Hebei Engineering and
Computer Vision Course Lecture 04. Template Matching Image Pyramids. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 11/03/2015
 Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Face Hallucination Based on Eigentransformation Learning
 Advanced Science and Technology etters, pp.32-37 http://dx.doi.org/10.14257/astl.2016. Face allucination Based on Eigentransformation earning Guohua Zou School of software, East China University of Technology,
Advanced Science and Technology etters, pp.32-37 http://dx.doi.org/10.14257/astl.2016. Face allucination Based on Eigentransformation earning Guohua Zou School of software, East China University of Technology,
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
The. Handbook ijthbdition. John C. Russ. North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina
 The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
The IMAGE PROCESSING Handbook ijthbdition John C. Russ North Carolina State University Materials Science and Engineering Department Raleigh, North Carolina (cp ) Taylor &. Francis \V J Taylor SiFrancis
SEOUL NATIONAL UNIVERSITY
 Fashion Technology 5. 3D Garment CAD-1 Sungmin Kim SEOUL NATIONAL UNIVERSITY Overview Design Process Concept Design Scalable vector graphics Feature-based design Pattern Design 2D Parametric design 3D
Fashion Technology 5. 3D Garment CAD-1 Sungmin Kim SEOUL NATIONAL UNIVERSITY Overview Design Process Concept Design Scalable vector graphics Feature-based design Pattern Design 2D Parametric design 3D
Robert Collins CSE598G. Intro to Template Matching and the Lucas-Kanade Method
 Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Intro to Template Matching and the Lucas-Kanade Method Appearance-Based Tracking current frame + previous location likelihood over object location current location appearance model (e.g. image template,
Image Processing Fundamentals. Nicolas Vazquez Principal Software Engineer National Instruments
 Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Image Processing Fundamentals Nicolas Vazquez Principal Software Engineer National Instruments Agenda Objectives and Motivations Enhancing Images Checking for Presence Locating Parts Measuring Features
Generic Face Alignment Using an Improved Active Shape Model
 Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Generic Face Alignment Using an Improved Active Shape Model Liting Wang, Xiaoqing Ding, Chi Fang Electronic Engineering Department, Tsinghua University, Beijing, China {wanglt, dxq, fangchi} @ocrserv.ee.tsinghua.edu.cn
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition. Isma Hadji G. N. DeSouza
 Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Bridging the Gap Between Local and Global Approaches for 3D Object Recognition Isma Hadji G. N. DeSouza Outline Introduction Motivation Proposed Methods: 1. LEFT keypoint Detector 2. LGS Feature Descriptor
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Skin and Face Detection
 Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Skin and Face Detection Linda Shapiro EE/CSE 576 1 What s Coming 1. Review of Bakic flesh detector 2. Fleck and Forsyth flesh detector 3. Details of Rowley face detector 4. Review of the basic AdaBoost
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides