Raghuraman Gopalan Center for Automation Research University of Maryland, College Park
|
|
|
- Madlyn Cox
- 5 years ago
- Views:
Transcription
1 2D Shape Matching (and Object Recognition) Raghuraman Gopalan Center for Automation Research University of Maryland, College Park 1
2 Outline What is a shape? Part 1: Matching/ Recognition Shape contexts [Belongie, Malik, Puzicha TPAMI 02] Indexing [Biswas, Aggarwal, Chellappa TMM 10] Part 2: General discussion 2


3 Shape Some slides were adapted from Prof. Grauman s course at Texas Austin, and Prof. Malik s presentation at MIT 3

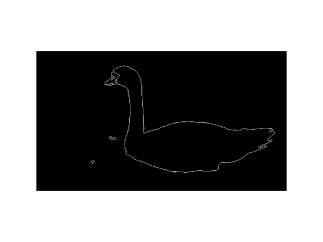

4 Where have we encountered shape before? Edges/ Contours Silhouettes 4
5 A definition of shape Defn 1: A set of points that collectively represent the object We are interested in their location information alone!! Defn 2: Mathematically, shape is an equivalence class under a group of transformations Given a set of points X representing an object O, and a set of transformations T, shape S={t(X) t\in T} Issues? Kendall 84 5





6 Applications of Shapes Analysis of anatomical structures Figure from Grimson & Golland Recognition, detection Fig from Opelt et al. Pose Morphology Characteristic feature Fig from Belongie et al. 6
7 Part 1: 2D shape matching 7

 [Fig")



8 Recognition using shapes (eg. model fitting) [Fig from Marszalek & Schmid, 2007] For example, the model could be a line, a circle, or an arbitrary shape. 8


9 Example: Deformable contours Visual Dynamics Group, Dept. Engineering Science, University of Oxford. Applications: Traffic monitoring Human-computer interaction Animation Surveillance Computer Assisted Diagnosis in medical imaging 9
10 Issues at stake Representation Holistic Part-based Matching How to compute distance between shapes? Challenges in recognition Information loss in 3D to 2D projection Articulations Occlusion. Invariance??? Any other issue? 10
11 Representation [Veltkamp 00] Holistic Moments Fourier descriptors Computational geometry Curvature scale-space 11
12 12
13 Part-based medial axis transform shock graphs 13
14 Matching: How to compare shapes? 14
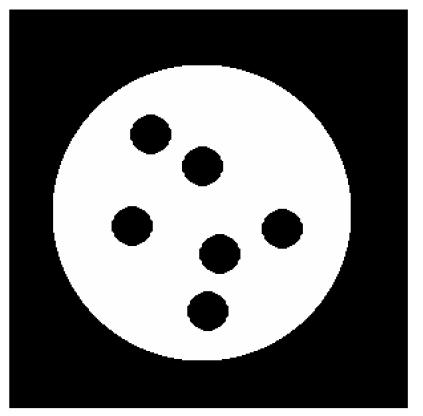
15 Discussion for a set of points Hausdorff distance 15
16 Chamfer distance Average distance to nearest feature T: template shape a set of points I: image to search a set of points di(t): min distance for point t to some point in I 16
17 Chamfer distance How is the measure different than just filtering with a mask having the shape points? Edge image 17
18 Distance Transform Image features (2D) Distance Transform Distance Transform is a function D( ) that for each image pixel p assigns a non-negative number D(p) corresponding to distance from p to the nearest feature in the image I Features could be edge points, foreground points, Source: Yuri Boykov 18


 >>")
19 Distance transform original edges distance transform Value at (x,y) tells how far that position is from the nearest edge point (or other binary mage structure) >> help bwdist 19
20 Chamfer distance Average distance to nearest feature Edge image Distance transform image 20

21 Chamfer distance Edge image Distance transform image Fig from D. Gavrila, DAGM

22 A limitation of active contours External energy: snake does not really see object boundaries in the image unless it gets very close to it. image gradients I are large only directly on the boundary 22
23 What limitations might we have using only edge points to represent a shape? How descriptive is a point? 23
24 Comparing shapes What points on these two sampled contours are most similar? How do you know? 24
25 Shape context descriptor [Belongie et al 02] Count the number of points inside each bin, e.g.: Count = 4... Count = 10 Compact representation of distribution of points relative to each point Shape context slides from Belongie et al. 25

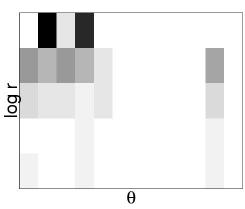
26 Shape context descriptor 26


27 Comparing shape contexts Compute matching costs using Chi Squared distance: Recover correspondences by solving for least cost assignment, using costs C ij (Then use a deformable template match, given the correspondences.) 27
28 Invariance/ Robustness Translation Scaling Rotation Modeling transformations thin plate splines (TPS) Generalization of cubic splines to 2D Matching cost = f(shape context distances, bending energy of thin plate splines) Can add appearance information too Outliers? 28
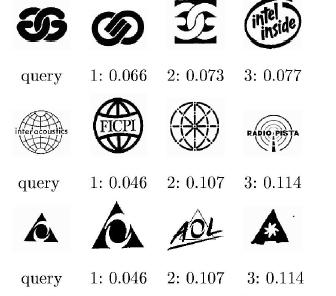
29 An example of shape context-based matching 29
30 Some retrieval results 30
31 Efficient matching of shape contexts [Mori et al 05] Fast-pruning randomly select a set of points Detailed matching 31
32 Efficient matching of shape contexts [Mori et al 05] contd Vector quantization 32
33 Are things clear so far? 33
34 Detour - Articulation [Ling, Jacobs 07] 34
35 Inner distance vs. (2D) geodesic distance 35
36 The problem of junctions Is inner distance truly invariant to articulations? 36
37 37
38 Non-planar articulations? [Gopalan, Turaga, Chellappa 10] 38
39 Indexing approach to shape matching [Biswas et al 10] Why? 39

40 Indexing - framework Pair-wise Features: Inner distance, Contour length, relative angles etc. 40
41 41
42 Part 2 Shapes as equivalence classes Kendall s shape space Shape is all the geometric information that remains when the location, scale and rotation effects are filtered out from the object 42
43 Pre-shape Kendall s Statistical Shape Theory used for the characterization of shape. Pre-shape accounts for location and scale invariance alone. k landmark points (X:k\times 2) Translational Invariance: Subtract mean Scale Invariance : Normalize the scale CX 1 Z, 1 1 T c = where C = Ik k k C X k Some slides were adapted from Dr. Veeraraghavan s website 43
44 Feature extraction Silhoutte Landmarks Centered Landmarks Pre-shape vector 44
45 [Veeraraghavan, Roy-Chowdhury, Chellappa 05] Shape lies on a spherical manifold. Shape distance must incorporate the non- Euclidean nature of the shape space. 45
46 Affine subspaces [Turaga, Veeraraghavan, Chellappa 08] 46
47 Other examples Space of Blur Modeling group trajectories etc.. 47
48 Conclusion Shape as a set of points configuring the geometry of the object Representation, matching, recognition Shape contexts, Indexing, Articulation Shape as equivalence class under a group of transformations 48
49 Announcements HW 5 will be posted today; On Stereo, and Shape matching Due Nov. 30 (Tuesday after Thanksgiving) Turn in HW 4 Midterms solutions by weekend 49

50 Questions? 50
Edges and Binary Image Analysis April 12 th, 2018
 4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
4/2/208 Edges and Binary Image Analysis April 2 th, 208 Yong Jae Lee UC Davis Previously Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Previously. Edge detection. Today. Thresholding. Gradients -> edges 2/1/2011. Edges and Binary Image Analysis
 2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
2//20 Previously Edges and Binary Image Analysis Mon, Jan 3 Prof. Kristen Grauman UT-Austin Filters allow local image neighborhood to influence our description and features Smoothing to reduce noise Derivatives
Improving Shape retrieval by Spectral Matching and Meta Similarity
 1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
1 / 21 Improving Shape retrieval by Spectral Matching and Meta Similarity Amir Egozi (BGU), Yosi Keller (BIU) and Hugo Guterman (BGU) Department of Electrical and Computer Engineering, Ben-Gurion University
Shape Contexts. Newton Petersen 4/25/2008
 Shape Contexts Newton Petersen 4/25/28 "Shape Matching and Object Recognition Using Shape Contexts", Belongie et al. PAMI April 22 Agenda Study Matlab code for computing shape context Look at limitations
Shape Contexts Newton Petersen 4/25/28 "Shape Matching and Object Recognition Using Shape Contexts", Belongie et al. PAMI April 22 Agenda Study Matlab code for computing shape context Look at limitations
Cell Clustering Using Shape and Cell Context. Descriptor
 Cell Clustering Using Shape and Cell Context Descriptor Allison Mok: 55596627 F. Park E. Esser UC Irvine August 11, 2011 Abstract Given a set of boundary points from a 2-D image, the shape context captures
Cell Clustering Using Shape and Cell Context Descriptor Allison Mok: 55596627 F. Park E. Esser UC Irvine August 11, 2011 Abstract Given a set of boundary points from a 2-D image, the shape context captures
Edges and Binary Image Analysis. Thurs Jan 26 Kristen Grauman UT Austin. Today. Edge detection and matching
 /25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
/25/207 Edges and Binary Image Analysis Thurs Jan 26 Kristen Grauman UT Austin Today Edge detection and matching process the image gradient to find curves/contours comparing contours Binary image analysis
Articulation-Invariant Representation of Non-planar Shapes
 Articulation-Invariant Representation of Non-planar Shapes Raghuraman Gopalan, Pavan Turaga, and Rama Chellappa Dept. of ECE, University of Maryland, College Park, MD 20742 USA {raghuram,pturaga,rama}@umiacs.umd.edu
Articulation-Invariant Representation of Non-planar Shapes Raghuraman Gopalan, Pavan Turaga, and Rama Chellappa Dept. of ECE, University of Maryland, College Park, MD 20742 USA {raghuram,pturaga,rama}@umiacs.umd.edu
Using the Inner-Distance for Classification of Articulated Shapes
 Using the Inner-Distance for Classification of Articulated Shapes Haibin Ling David W. Jacobs Computer Science Department, University of Maryland, College Park {hbling, djacobs}@ umiacs.umd.edu Abstract
Using the Inner-Distance for Classification of Articulated Shapes Haibin Ling David W. Jacobs Computer Science Department, University of Maryland, College Park {hbling, djacobs}@ umiacs.umd.edu Abstract
Segmentation. Separate image into coherent regions
 Segmentation II Segmentation Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Interactive
Segmentation II Segmentation Separate image into coherent regions Berkeley segmentation database: http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/ Slide by L. Lazebnik Interactive
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Image gradients and edges
 Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
Image gradients and edges Thurs Sept 3 Prof. Kristen Grauman UT-Austin Last time Various models for image noise Linear filters and convolution useful for Image smoothing, remov ing noise Box filter Gaussian
A New Shape Matching Measure for Nonlinear Distorted Object Recognition
 A New Shape Matching Measure for Nonlinear Distorted Object Recognition S. Srisuky, M. Tamsriy, R. Fooprateepsiri?, P. Sookavatanay and K. Sunaty Department of Computer Engineeringy, Department of Information
A New Shape Matching Measure for Nonlinear Distorted Object Recognition S. Srisuky, M. Tamsriy, R. Fooprateepsiri?, P. Sookavatanay and K. Sunaty Department of Computer Engineeringy, Department of Information
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
STATISTICS AND ANALYSIS OF SHAPE
 Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
Control and Cybernetics vol. 36 (2007) No. 2 Book review: STATISTICS AND ANALYSIS OF SHAPE by H. Krim, A. Yezzi, Jr., eds. There are numerous definitions of a notion of shape of an object. These definitions
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I)
") Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Shape Classification and Cell Movement in 3D Matrix Tutorial (Part I) Fred Park UCI icamp 2011 Outline 1. Motivation and Shape Definition 2. Shape Descriptors 3. Classification 4. Applications: Shape Matching,
Shape Classification Using Regional Descriptors and Tangent Function
 Shape Classification Using Regional Descriptors and Tangent Function Meetal Kalantri meetalkalantri4@gmail.com Rahul Dhuture Amit Fulsunge Abstract In this paper three novel hybrid regional descriptor
Shape Classification Using Regional Descriptors and Tangent Function Meetal Kalantri meetalkalantri4@gmail.com Rahul Dhuture Amit Fulsunge Abstract In this paper three novel hybrid regional descriptor
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Shape Descriptor using Polar Plot for Shape Recognition.
 Shape Descriptor using Polar Plot for Shape Recognition. Brijesh Pillai ECE Graduate Student, Clemson University bpillai@clemson.edu Abstract : This paper presents my work on computing shape models that
Shape Descriptor using Polar Plot for Shape Recognition. Brijesh Pillai ECE Graduate Student, Clemson University bpillai@clemson.edu Abstract : This paper presents my work on computing shape models that
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Shape Context Matching For Efficient OCR
 Matching For Efficient OCR May 14, 2012 Matching For Efficient OCR Table of contents 1 Motivation Background 2 What is a? Matching s Simliarity Measure 3 Matching s via Pyramid Matching Matching For Efficient
Matching For Efficient OCR May 14, 2012 Matching For Efficient OCR Table of contents 1 Motivation Background 2 What is a? Matching s Simliarity Measure 3 Matching s via Pyramid Matching Matching For Efficient
Lecture 10: Image Descriptors and Representation
 I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
I2200: Digital Image processing Lecture 10: Image Descriptors and Representation Prof. YingLi Tian Nov. 15, 2017 Department of Electrical Engineering The City College of New York The City University of
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Shape Matching. Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007
 Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Shape Matching Brandon Smith and Shengnan Wang Computer Vision CS766 Fall 2007 Outline Introduction and Background Uses of shape matching Kinds of shape matching Support Vector Machine (SVM) Matching with
Announcements. Recognition. Recognition. Recognition. Recognition. Homework 3 is due May 18, 11:59 PM Reading: Computer Vision I CSE 152 Lecture 14
 Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Announcements Computer Vision I CSE 152 Lecture 14 Homework 3 is due May 18, 11:59 PM Reading: Chapter 15: Learning to Classify Chapter 16: Classifying Images Chapter 17: Detecting Objects in Images Given
Deformable 2D Shape Matching Based on Shape Contexts and Dynamic Programming
 Deformable 2D Shape Matching Based on Shape Contexts and Dynamic Programming Iasonas Oikonomidis and Antonis A. Argyros Institute of Computer Science, Forth and Computer Science Department, University
Deformable 2D Shape Matching Based on Shape Contexts and Dynamic Programming Iasonas Oikonomidis and Antonis A. Argyros Institute of Computer Science, Forth and Computer Science Department, University
Some material taken from: Yuri Boykov, Western Ontario
 CS664 Lecture #22: Distance transforms, Hausdorff matching, flexible models Some material taken from: Yuri Boykov, Western Ontario Announcements The SIFT demo toolkit is available from http://www.evolution.com/product/oem/d
CS664 Lecture #22: Distance transforms, Hausdorff matching, flexible models Some material taken from: Yuri Boykov, Western Ontario Announcements The SIFT demo toolkit is available from http://www.evolution.com/product/oem/d
CS664 Lecture #21: SIFT, object recognition, dynamic programming
 CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
CS664 Lecture #21: SIFT, object recognition, dynamic programming Some material taken from: Sebastian Thrun, Stanford http://cs223b.stanford.edu/ Yuri Boykov, Western Ontario David Lowe, UBC http://www.cs.ubc.ca/~lowe/keypoints/
Rotation Invariant Image Registration using Robust Shape Matching
 International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 2 (2014), pp. 125-132 International Research Publication House http://www.irphouse.com Rotation Invariant
International Journal of Electronic and Electrical Engineering. ISSN 0974-2174 Volume 7, Number 2 (2014), pp. 125-132 International Research Publication House http://www.irphouse.com Rotation Invariant
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Model-Based Human Motion Capture from Monocular Video Sequences
 Model-Based Human Motion Capture from Monocular Video Sequences Jihun Park 1, Sangho Park 2, and J.K. Aggarwal 2 1 Department of Computer Engineering Hongik University Seoul, Korea jhpark@hongik.ac.kr
Model-Based Human Motion Capture from Monocular Video Sequences Jihun Park 1, Sangho Park 2, and J.K. Aggarwal 2 1 Department of Computer Engineering Hongik University Seoul, Korea jhpark@hongik.ac.kr
Model-based Visual Tracking:
 Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Technische Universität München Model-based Visual Tracking: the OpenTL framework Giorgio Panin Technische Universität München Institut für Informatik Lehrstuhl für Echtzeitsysteme und Robotik (Prof. Alois
Object and Class Recognition I:
 Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
Object and Class Recognition I: Object Recognition Lectures 10 Sources ICCV 2005 short courses Li Fei-Fei (UIUC), Rob Fergus (Oxford-MIT), Antonio Torralba (MIT) http://people.csail.mit.edu/torralba/iccv2005
2: Image Display and Digital Images. EE547 Computer Vision: Lecture Slides. 2: Digital Images. 1. Introduction: EE547 Computer Vision
 EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
EE547 Computer Vision: Lecture Slides Anthony P. Reeves November 24, 1998 Lecture 2: Image Display and Digital Images 2: Image Display and Digital Images Image Display: - True Color, Grey, Pseudo Color,
CoE4TN4 Image Processing
 CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
CoE4TN4 Image Processing Chapter 11 Image Representation & Description Image Representation & Description After an image is segmented into regions, the regions are represented and described in a form suitable
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Segmentation & Clustering
 EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
EECS 442 Computer vision Segmentation & Clustering Segmentation in human vision K-mean clustering Mean-shift Graph-cut Reading: Chapters 14 [FP] Some slides of this lectures are courtesy of prof F. Li,
Leaf Classification from Boundary Analysis
 Leaf Classification from Boundary Analysis Anne Jorstad AMSC 663 Midterm Progress Report Fall 2007 Advisor: Dr. David Jacobs, Computer Science 1 Outline Background, Problem Statement Algorithm Validation
Leaf Classification from Boundary Analysis Anne Jorstad AMSC 663 Midterm Progress Report Fall 2007 Advisor: Dr. David Jacobs, Computer Science 1 Outline Background, Problem Statement Algorithm Validation
Shape Matching and Object Recognition using Low Distortion Correspondences
 Shape Matching and Object Recognition using Low Distortion Correspondences Authors: Alexander C. Berg, Tamara L. Berg, Jitendra Malik Presenter: Kalyan Chandra Chintalapati Flow of the Presentation Introduction
Shape Matching and Object Recognition using Low Distortion Correspondences Authors: Alexander C. Berg, Tamara L. Berg, Jitendra Malik Presenter: Kalyan Chandra Chintalapati Flow of the Presentation Introduction
Intuitive, Localized Analysis of Shape Variability
 Intuitive, Localized Analysis of Shape Variability Paul Yushkevich, Stephen M. Pizer, Sarang Joshi, and J. S. Marron Medical Image Display and Analysis Group, University of North Carolina at Chapel Hill.
Intuitive, Localized Analysis of Shape Variability Paul Yushkevich, Stephen M. Pizer, Sarang Joshi, and J. S. Marron Medical Image Display and Analysis Group, University of North Carolina at Chapel Hill.
Digital Image Processing Fundamentals
 Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Ioannis Pitas Digital Image Processing Fundamentals Chapter 7 Shape Description Answers to the Chapter Questions Thessaloniki 1998 Chapter 7: Shape description 7.1 Introduction 1. Why is invariance to
Robust 2D Shape Correspondence using Geodesic Shape Context
 Robust 2D Shape Correspondence using Geodesic Shape Context Varun Jain Richard (Hao) Zhang GrUVi Lab, School of Computing Science Simon Fraser University, Burnaby, BC, Canada E-mail: vjain, haoz@cs.sfu.ca
Robust 2D Shape Correspondence using Geodesic Shape Context Varun Jain Richard (Hao) Zhang GrUVi Lab, School of Computing Science Simon Fraser University, Burnaby, BC, Canada E-mail: vjain, haoz@cs.sfu.ca
Category vs. instance recognition
 Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Category vs. instance recognition Category: Find all the people Find all the buildings Often within a single image Often sliding window Instance: Is this face James? Find this specific famous building
Automatic Image Alignment (feature-based)
") Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Automatic Image Alignment (feature-based) Mike Nese with a lot of slides stolen from Steve Seitz and Rick Szeliski 15-463: Computational Photography Alexei Efros, CMU, Fall 2006 Today s lecture Feature
Lecture 14 Shape. ch. 9, sec. 1-8, of Machine Vision by Wesley E. Snyder & Hairong Qi. Spring (CMU RI) : BioE 2630 (Pitt)
 : BioE 2630 (Pitt)") Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Lecture 14 Shape ch. 9, sec. 1-8, 12-14 of Machine Vision by Wesley E. Snyder & Hairong Qi Spring 2018 16-725 (CMU RI) : BioE 2630 (Pitt) Dr. John Galeotti The content of these slides by John Galeotti,
Snakes, level sets and graphcuts. (Deformable models)
") INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
INSTITUTE OF INFORMATION AND COMMUNICATION TECHNOLOGIES BULGARIAN ACADEMY OF SCIENCE Snakes, level sets and graphcuts (Deformable models) Centro de Visión por Computador, Departament de Matemàtica Aplicada
A SIFT Descriptor with Global Context
 A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
A SIFT Descriptor with Global Context Eric N. Mortensen Oregon State University enm@eecs.oregonstate.edu Hongli Deng Oregon State University deng@eecs.oregonstate.edu Linda Shapiro University of Washington
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reeb Graphs Through Local Binary Patterns
 Reeb Graphs Through Local Binary Patterns Ines Janusch and Walter G. Kropatsch Pattern Recognition and Image Processing Group Institute of Computer Graphics and Algorithms Vienna University of Technology,
Reeb Graphs Through Local Binary Patterns Ines Janusch and Walter G. Kropatsch Pattern Recognition and Image Processing Group Institute of Computer Graphics and Algorithms Vienna University of Technology,
Topological Mapping. Discrete Bayes Filter
 Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Topological Mapping Discrete Bayes Filter Vision Based Localization Given a image(s) acquired by moving camera determine the robot s location and pose? Towards localization without odometry What can be
Lecture 7: Morphological Image Processing
 I2200: Digital Image processing Lecture 7: Morphological Image Processing Prof. YingLi Tian Oct. 25, 2017 Department of Electrical Engineering The City College of New York The City University of New York
I2200: Digital Image processing Lecture 7: Morphological Image Processing Prof. YingLi Tian Oct. 25, 2017 Department of Electrical Engineering The City College of New York The City University of New York
Statistical Shape Analysis
 Statistical Shape Analysis I. L. Dryden and K. V. Mardia University ofleeds, UK JOHN WILEY& SONS Chichester New York Weinheim Brisbane Singapore Toronto Contents Preface Acknowledgements xv xix 1 Introduction
Statistical Shape Analysis I. L. Dryden and K. V. Mardia University ofleeds, UK JOHN WILEY& SONS Chichester New York Weinheim Brisbane Singapore Toronto Contents Preface Acknowledgements xv xix 1 Introduction
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
Shape recognition with edge-based features
 Shape recognition with edge-based features K. Mikolajczyk A. Zisserman C. Schmid Dept. of Engineering Science Dept. of Engineering Science INRIA Rhône-Alpes Oxford, OX1 3PJ Oxford, OX1 3PJ 38330 Montbonnot
Shape recognition with edge-based features K. Mikolajczyk A. Zisserman C. Schmid Dept. of Engineering Science Dept. of Engineering Science INRIA Rhône-Alpes Oxford, OX1 3PJ Oxford, OX1 3PJ 38330 Montbonnot
Review for the Final
 Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Review for the Final CS 635 Review (Topics Covered) Image Compression Lossless Coding Compression Huffman Interpixel RLE Lossy Quantization Discrete Cosine Transform JPEG CS 635 Review (Topics Covered)
Machine vision. Summary # 6: Shape descriptors
 Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Machine vision Summary # : Shape descriptors SHAPE DESCRIPTORS Objects in an image are a collection of pixels. In order to describe an object or distinguish between objects, we need to understand the properties
Face Shape Classification Based on Region Similarity, Correlation and Fractal Dimensions
 www.ijcsi.org 24 Face Shape Classification Based on Region Similarity, Correlation and Fractal Dimensions N K Bansode 1, P K Sinha 2 1 Department of Computer & IT, College of Engineering, Pune University
www.ijcsi.org 24 Face Shape Classification Based on Region Similarity, Correlation and Fractal Dimensions N K Bansode 1, P K Sinha 2 1 Department of Computer & IT, College of Engineering, Pune University
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Recognizing hand-drawn images using shape context
 Recognizing hand-drawn images using shape context Gyozo Gidofalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract The objective
Recognizing hand-drawn images using shape context Gyozo Gidofalvi Department of Computer Science and Engineering University of California, San Diego La Jolla, CA 92037 gyozo@cs.ucsd.edu Abstract The objective
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
CLASSIFICATION OF BOUNDARY AND REGION SHAPES USING HU-MOMENT INVARIANTS
 CLASSIFICATION OF BOUNDARY AND REGION SHAPES USING HU-MOMENT INVARIANTS B.Vanajakshi Department of Electronics & Communications Engg. Assoc.prof. Sri Viveka Institute of Technology Vijayawada, India E-mail:
CLASSIFICATION OF BOUNDARY AND REGION SHAPES USING HU-MOMENT INVARIANTS B.Vanajakshi Department of Electronics & Communications Engg. Assoc.prof. Sri Viveka Institute of Technology Vijayawada, India E-mail:
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Object Recognition using Visual Codebook
 Object Recognition using Visual Codebook Abstract: Object recognition is an important task in image processing and computer vision. This paper proposes shape context, color histogram and completed local
Object Recognition using Visual Codebook Abstract: Object recognition is an important task in image processing and computer vision. This paper proposes shape context, color histogram and completed local
Visual Object Recognition
 Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Visual Object Recognition -67777 Instructor: Daphna Weinshall, daphna@cs.huji.ac.il Office: Ross 211 Office hours: Sunday 12:00-13:00 1 Sources Recognizing and Learning Object Categories ICCV 2005 short
Def De orma f tion orma Disney/Pixar
 Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Deformation Disney/Pixar Deformation 2 Motivation Easy modeling generate new shapes by deforming existing ones 3 Motivation Easy modeling generate new shapes by deforming existing ones 4 Motivation Character
Human pose estimation using Active Shape Models
 Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body
Human pose estimation using Active Shape Models Changhyuk Jang and Keechul Jung Abstract Human pose estimation can be executed using Active Shape Models. The existing techniques for applying to human-body
Announcements, schedule. Lecture 8: Fitting. Weighted graph representation. Outline. Segmentation by Graph Cuts. Images as graphs
 Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements. Recognition I. Gradient Space (p,q) What is the reflectance map?
 What is the reflectance map?") Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Announcements I HW 3 due 12 noon, tomorrow. HW 4 to be posted soon recognition Lecture plan recognition for next two lectures, then video and motion. Introduction to Computer Vision CSE 152 Lecture 17
Distribution Distance Functions
 COMP 875 November 10, 2009 Matthew O Meara Question How similar are these? Outline Motivation Protein Score Function Object Retrieval Kernel Machines 1 Motivation Protein Score Function Object Retrieval
COMP 875 November 10, 2009 Matthew O Meara Question How similar are these? Outline Motivation Protein Score Function Object Retrieval Kernel Machines 1 Motivation Protein Score Function Object Retrieval
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera
 Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Automatic Reconstruction of 3D Objects Using a Mobile Monoscopic Camera Wolfgang Niem, Jochen Wingbermühle Universität Hannover Institut für Theoretische Nachrichtentechnik und Informationsverarbeitung
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
CS231A Section 6: Problem Set 3
 CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
CS231A Section 6: Problem Set 3 Kevin Wong Review 6 -! 1 11/09/2012 Announcements PS3 Due 2:15pm Tuesday, Nov 13 Extra Office Hours: Friday 6 8pm Huang Common Area, Basement Level. Review 6 -! 2 Topics
Visuelle Perzeption für Mensch- Maschine Schnittstellen
 Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
Visuelle Perzeption für Mensch- Maschine Schnittstellen Vorlesung, WS 2009 Prof. Dr. Rainer Stiefelhagen Dr. Edgar Seemann Institut für Anthropomatik Universität Karlsruhe (TH) http://cvhci.ira.uka.de
EECS490: Digital Image Processing. Lecture #23
 Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
Lecture #23 Motion segmentation & motion tracking Boundary tracking Chain codes Minimum perimeter polygons Signatures Motion Segmentation P k Accumulative Difference Image Positive ADI Negative ADI (ADI)
CHAPTER 1 Introduction 1. CHAPTER 2 Images, Sampling and Frequency Domain Processing 37
 Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Extended Contents List Preface... xi About the authors... xvii CHAPTER 1 Introduction 1 1.1 Overview... 1 1.2 Human and Computer Vision... 2 1.3 The Human Vision System... 4 1.3.1 The Eye... 5 1.3.2 The
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Image Segmentation Using Wavelets
 International Journal of Scientific & Engineering Research Volume 3, Issue 12, December-2012 1 Image Segmentation Using Wavelets Ratinder Kaur, V. K. Banga, Vipul Sharma Abstract-In our proposed technique
International Journal of Scientific & Engineering Research Volume 3, Issue 12, December-2012 1 Image Segmentation Using Wavelets Ratinder Kaur, V. K. Banga, Vipul Sharma Abstract-In our proposed technique
Feature Extraction and Image Processing, 2 nd Edition. Contents. Preface
 , 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
, 2 nd Edition Preface ix 1 Introduction 1 1.1 Overview 1 1.2 Human and Computer Vision 1 1.3 The Human Vision System 3 1.3.1 The Eye 4 1.3.2 The Neural System 7 1.3.3 Processing 7 1.4 Computer Vision
human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC
 COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
COS 429: COMPUTER VISON Segmentation human vision: grouping k-means clustering graph-theoretic clustering Hough transform line fitting RANSAC Reading: Chapters 14, 15 Some of the slides are credited to:
An evaluation of Nearest Neighbor Images to Classes versus Nearest Neighbor Images to Images Instructed by Professor David Jacobs Phil Huynh
 An evaluation of Nearest Neighbor Images to Classes versus Nearest Neighbor Images to Images Instructed by Professor David Jacobs Phil Huynh Abstract In 2008, Boiman et al. announced in their work "In
An evaluation of Nearest Neighbor Images to Classes versus Nearest Neighbor Images to Images Instructed by Professor David Jacobs Phil Huynh Abstract In 2008, Boiman et al. announced in their work "In
Prototype-based Intraclass Pose Recognition of Partial 3D Scans
 Prototype-based Intraclass Pose Recognition of Partial 3D Scans Jacob MONTIEL Hamid LAGA Masayuki NAKAJIMA Graduate School of Information Science and Engineering, Tokyo Institute of Technology Global Edge
Prototype-based Intraclass Pose Recognition of Partial 3D Scans Jacob MONTIEL Hamid LAGA Masayuki NAKAJIMA Graduate School of Information Science and Engineering, Tokyo Institute of Technology Global Edge
Open-Curve Shape Correspondence Without Endpoint Correspondence
 Open-Curve Shape Correspondence Without Endpoint Correspondence Theodor Richardson and Song Wang Department of Computer Science and Engineering, University of South Carolina, Columbia, SC 29208, USA richa268@cse.sc.edu,
Open-Curve Shape Correspondence Without Endpoint Correspondence Theodor Richardson and Song Wang Department of Computer Science and Engineering, University of South Carolina, Columbia, SC 29208, USA richa268@cse.sc.edu,
Correspondence. CS 468 Geometry Processing Algorithms. Maks Ovsjanikov
 Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching & Correspondence CS 468 Geometry Processing Algorithms Maks Ovsjanikov Wednesday, October 27 th 2010 Overall Goal Given two shapes, find correspondences between them. Overall Goal Given
Shape Matching for Foliage Database Retrieval
 >A book chapter template < 1 Shape Matching for Foliage Database Retrieval Haibin Ling 1 and David W. Jacobs 1 Dept. of Computer and Information Sciences, Information Science and Technology Center, Temple
>A book chapter template < 1 Shape Matching for Foliage Database Retrieval Haibin Ling 1 and David W. Jacobs 1 Dept. of Computer and Information Sciences, Information Science and Technology Center, Temple
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Combining Appearance and Topology for Wide
 Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Combining Appearance and Topology for Wide Baseline Matching Dennis Tell and Stefan Carlsson Presented by: Josh Wills Image Point Correspondences Critical foundation for many vision applications 3-D reconstruction,
Shape Matching and Object Recognition Using Dissimilarity Measures with Hungarian Algorithm
 Shape Matching and Object Recognition Using Dissimilarity Measures with Hungarian Algorithm 1 D. Chitra, T. Manigandan, 3 N. Devarajan 1 Government College of Technology Coimbatore, TamilNadu, India School
Shape Matching and Object Recognition Using Dissimilarity Measures with Hungarian Algorithm 1 D. Chitra, T. Manigandan, 3 N. Devarajan 1 Government College of Technology Coimbatore, TamilNadu, India School
Lecture 4, Part 2: The SKS Algorithm
 Lecture 4, Part 2: The SKS Algorithm Wesley Snyder, Ph.D. UWA, CSSE NCSU, ECE Lecture 4, Part 2: The SKS Algorithm p. 1/2 The SKS Algorithm 2-d shape recognition algorithm which uses the philosophy of
Lecture 4, Part 2: The SKS Algorithm Wesley Snyder, Ph.D. UWA, CSSE NCSU, ECE Lecture 4, Part 2: The SKS Algorithm p. 1/2 The SKS Algorithm 2-d shape recognition algorithm which uses the philosophy of
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Shape representation by skeletonization. Shape. Shape. modular machine vision system. Feature extraction shape representation. Shape representation
 Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Shape representation by skeletonization Kálmán Palágyi Shape It is a fundamental concept in computer vision. It can be regarded as the basis for high-level image processing stages concentrating on scene
Chamfer matching. More on template matching. Distance transform example. Computing the distance transform. Shape based matching.
 Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chamfer matching Given: binary image, B, of edge and local feature locations binary edge template, T, of shape we want to match More on template matching Shape based matching Let D be an array in registration
Chapter 11 Representation & Description
 Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Chain Codes Chain codes are used to represent a boundary by a connected sequence of straight-line segments of specified length and direction. The direction of each segment is coded by using a numbering
Feature description. IE PŁ M. Strzelecki, P. Strumiłło
 Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Feature description After an image has been segmented the detected region needs to be described (represented) in a form more suitable for further processing. Representation of an image region can be carried
Reinforcement Matching Using Region Context
 Reinforcement Matching Using Region Context Hongli Deng 1 Eric N. Mortensen 1 Linda Shapiro 2 Thomas G. Dietterich 1 1 Electrical Engineering and Computer Science 2 Computer Science and Engineering Oregon
Reinforcement Matching Using Region Context Hongli Deng 1 Eric N. Mortensen 1 Linda Shapiro 2 Thomas G. Dietterich 1 1 Electrical Engineering and Computer Science 2 Computer Science and Engineering Oregon
CS 231A Computer Vision (Winter 2014) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
CS 231A Computer Vision (Winter 2014) Problem Set 3 Due: Feb. 18 th, 2015 (11:59pm) 1 Single Object Recognition Via SIFT (45 points) In his 2004 SIFT paper, David Lowe demonstrates impressive object recognition
ANIMATING ANIMAL MOTION
 ANIMATING ANIMAL MOTION FROM STILL Xuemiao Xu, Liang Wan, Xiaopei Liu, Tien-Tsin Wong, Liansheng Wnag, Chi-Sing Leung (presented by Kam, Hyeong Ryeol) CONTENTS 0 Abstract 1 Introduction 2 Related Work
ANIMATING ANIMAL MOTION FROM STILL Xuemiao Xu, Liang Wan, Xiaopei Liu, Tien-Tsin Wong, Liansheng Wnag, Chi-Sing Leung (presented by Kam, Hyeong Ryeol) CONTENTS 0 Abstract 1 Introduction 2 Related Work
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Robot vision review. Martin Jagersand
 Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Robot vision review Martin Jagersand What is Computer Vision? Computer Graphics Three Related fields Image Processing: Changes 2D images into other 2D images Computer Graphics: Takes 3D models, renders
Announcements. Computer Vision I. Motion Field Equation. Revisiting the small motion assumption. Visual Tracking. CSE252A Lecture 19.
 Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components
Visual Tracking CSE252A Lecture 19 Hw 4 assigned Announcements No class on Thursday 12/6 Extra class on Tuesday 12/4 at 6:30PM in WLH Room 2112 Motion Field Equation Measurements I x = I x, T: Components