Joint Spectral Correspondence for Disparate Image Matching
|
|
|
- Melvin Copeland
- 6 years ago
- Views:
Transcription





 as well.")

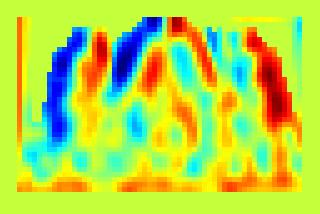
1 2013 IEEE Conference on Computer Vision and Pattern Recognition Joint Spectral Correspondence for Disparate Image Matching Mayank Bansal and Kostas Daniilidis GRASP Lab, University of Pennsylvania Philadelphia, PA, USA Abstract We address the problem of matching images with disparate appearance arising from factors like dramatic illumination (day vs. night), age (historic vs. new) and rendering style differences. The lack of local intensity or gradient patterns in these images makes the application of pixellevel descriptors like SIFT infeasible. We propose a novel formulation for detecting and matching persistent features between such images by analyzing the eigen-spectrum of the joint image graph constructed from all the pixels in the two images. We show experimental results of our approach on a public dataset of challenging image pairs and demonstrate significant performance improvements over state-of-the-art. 1. Introduction In this paper, we focus on matching images with disparate appearance. Such images might be taken during day and night or in different times in history, and they differ at the local pixel level in the sense that neither intensity nor gradient distributions are locally comparable. Thus, we cannot rely on pixel-level feature descriptors like SIFT. Instead, we propose to use the joint image graph spectrum to detect and match persistent features which robustly encode the appearance similarity we perceive when we look at such images. Consider the images in Fig. 1 where we have the same scene captured at different times of day 1. Visual comparison reveals the large amount of appearance change that occurs in the scene due to the illumination variation. Numerous SIFT features are detected in these images and they show good repeatability (blue bars in the plot) as well. However, the average precision (AP) of the SIFT descriptors computed directly from these images significantly de- The authors are grateful for support through the following grants: ARL MAST-CTA W911NF , and ARL RCTA W911NF , NSF-DGE Frames extracted from the time-lapse sequence at: youtube.com/watch?v=0ok4cdq-hau Figure 1. Day to night persistence matching. The spectrum of the joint image graphs is computed. The first row shows a day-time query-image (blue box) which is matched pair-wise against the pre-dusk, dusk and night images respectively from left to right. The second and third rows show the second eigen-vectors J (2) 1 and J (2) 2 for each pair of images (pre-dusk : day), (dusk : day), (night : day). The eigen-vectors corresponding to the query have a blue box to ease visualization. The plot compares the repeatability (bars) and average-precision (AP)(polyline) of the SIFT detector (blue) with the spectral method (red). grades as the illumination difference between the matched image pairs is increased as is visible from the blue polyline in the plot. In contrast, the spectral features we propose in this paper are comparable in their repeatability (red bars) and they behave significantly better in the Average Precision (red polyline) even for the most challenging pair: night vs. day. Spectral methods on the image graph laplacian have been used extensively in the literature for applications like clustering, segmentation [1, 11] etc. The extracted eigenfunctions are either discretized to obtain the desired number of clusters or segments in the image or they are used directly as the spectral space coordinates of the pixels in an /13 $ IEEE DOI /CVPR
2 embedded space representation. These coordinates are then further clustered using K-means to obtain discrete clustering solutions. In contrast, in this paper we propose to use the individual eigen-functions themselves as a feature representation of the image pair from which interesting and useful feature correspondence can be derived. We show how such a representation captures persistent regions in the image pair even when the appearance difference between them is substantial (day-night, historic-new etc.). Moreover, we propose a new definition of the joint image graph: all pixels of both images are nodes and the corresponding edge weights depend only on the difference of the local image structures and not on the proximity between the pixels. Although a partitioning of such a graph might cluster together distant regions, these regions even though disconnected in the image space are persistent across images. Our most significant contributions in this paper are: (1) a new representation between two images: the joint image graph defined only based on the affinity between image structures in the dense set of pixels from both images without considering the proximity between two image positions; (2) a new definition of persistent regions as the stable regions of the eigen-functions of that graph considered in their soft form without any discretization. We show that such persistent features are both repeatable across images and similar in terms of SIFT descriptors computed in the eigen space itself, in a variety of cross domain setups. We show experimental results of our approach on the challenging dataset from [3] which contains image pairs exhibiting dramatic illumination, age and rendering style differences. Our results clearly indicate the substantial matching improvement possible by looking at features derived from a joint image spectrum rather than relying on features detected individually in the two images to match in their descriptors. Unlike standard local-features approaches which detect features on each image independently, our method relies on computing features using both images simultaneously. However, we believe that the global information encoded in the joint image graph and its eigen-functions is the new cue that enables a better performance than approaches relying only on local neighborhoods. 2. Related Work Not many approaches exist that can handle the discrepancy between two images at the level that we address in this paper. Shechtman and Irani [7] proposed an approach for matching disparate images using patterns of local self-similarity encoded into a shape-context like descriptor. However, for the kind of disparate images we consider, the local self-similarity pattern itself can be significantly different between corresponding points in the image pair. Shrivastava et al. [8] recently proposed an approach for cross-domain image matching using data-driven learning techniques. Using a linear classifier, they learn the relative importance of different features (specifically, components of the global image HoG descriptor in the paper) for a given query image and then use the weight vector to define a matching score. In contrast, our focus is on extracting local features that are persistent between a pair of images instead of deriving a global image descriptor that can be used for retrieval. Recently, Hauagge and Snavely [3] have focused on the task of matching such images by defining local-symmetry features which capture various symmetries like bilateral, rotational etc. at the local level. This approach addresses matching rather than retrieval and the discrepancy level is similar to the level our approach handles, hence, we decided to use the dataset [3] as our main test set. Our methodology is most related to the works of [11] and [9]. The spectral analysis of the joint matrix between two images appeared first in [11] where the affinity matrices of object model patches and the input image are combined with a non-diagonal matrix associating object patches and image pixels. Toshev et al. [9] proposed an approach to determine co-salient regions between two images using a spectral technique on the joint image graph constructed from the images. Their joint image graph was constructed with all the pixels in the two images by defining separate affinity functions for intra and inter image terms. The intra image affinity was defined using the intervening contour cue while the inter image term was based entirely on the initial set of feature correspondences between the images. In this paper, we also use a joint image graph but we differ in (i) using no proximity information in the affinity matrix, (ii) using SIFT descriptor information instead of intensity differences, and (iii) defining both the intra and inter image terms densely using all the image pixels with a uniform affinity function that successfully captures the persistent regions shared between the images. The density of the interimage term allows us to apply spectral decomposition directly instead of requiring us to use the subspace technique in [9]. Thereafter, we show how we can use the extracted eigen-functions to construct features that are invariant to the large appearance changes between the input images. Glasner et al. [2] proposed a shape-based approach to jointly segment multiple closely-related images by combining contour and region information. They show examples of image pairs with illumination differences where their joint segmentation approach achieves better co-clustering than what is possible by using intra-image constraints alone. They start from a super-pixel segmentation of the images and then use contour-based constraints to drive their intraimage affinities. The inter-image constraints are derived from a comparison of HoG-like features only on contour segments. Our approach also uses gradient-based descriptors to enforce inter-image constraints however, we do so
![Figure 2. First column shows an image-pair from the dataset in [3].](/docs-images/75/72824423/images/3-0.jpg "Second through fifth columns show eigen-function pairs (J (2) 1,J(2) (5) 2 ),.")



















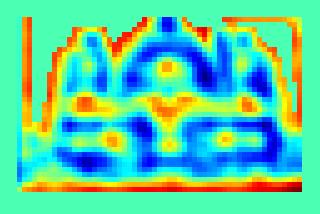
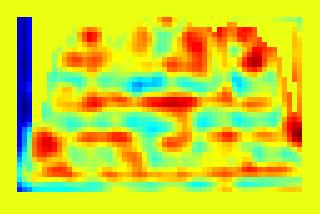
3 Figure 2. First column shows an image-pair from the dataset in [3]. Second through fifth columns show eigen-function pairs (J (2) 1,J(2) (5) 2 ),...,(J 1,J(5) 2 ) along with the detected MSER feature-ellipses. The green and magenta colors denote whether the features correspond to maxima or minima. Figure 3. For the image pair in the first column, the successive columns show the second-through-fifth eigen-function pairs obtained using a pixel-color based joint image graph. In this case, the eigen-functions do not suggest any significant correlation with the region correspondence in the original images. densely between every pair of pixels in the input images. Thus, we do not need any prior segmentation and we are not prone to errors due to misdetection of contours, particularly since contour detection would be very challenging for the kind of disparate images we focus on. Contours of the soft version of the eigenvectors of a single image affinity matrix computed following the Normalized Cuts criterion have also been used in [1] to include global relationships into the probabilistic boundary feature vector. 3. Technical Approach Consider the image pair in the first column of Fig. 2 depicting the same monument under significantly different illumination conditions. Each local facet of the monument is illuminated differently leading to dissimilar contrast and color characteristics. It is evident that finding features that are repetitive between the two pictures is a daunting task; in fact, the problem of finding descriptors that can account for the appearance differences at geometrically matching locations is itself quite challenging. On the other hand, we humans find it quite easy to ascertain by visual inspection that these two images correspond to the same monument. The kind of features we use to make such a judgment are the more inherent persistent features in the scene like the contours, salient regions, the local shapes, patterns of contrast etc. One can argue, then, that shape-based image matching Figure 4. For the image pair in the first column, the successive columns show the second-through-fifth eigen-functions obtained using dense-sift-based image graphs. The eigen analysis is performed on each image graph independently. In this case, the eigen-functions show correlations but the correlated regions are distributed across several different eigen-functions. techniques should be applicable for matching these images. However, the contrast variations make it very difficult to detect the image contours robustly. Most of the dominant contours in the scene are very low energy and the intensity at which corresponding contours would get detected varies between different regions in the two images. Therefore, we propose a spectral approach that detects these persistent image features using the eigen-spectrum of the joint image graph computed from appropriate local gradients in the two images. Before going into the details of the way the graph is constructed, let us focus on the images in the second to fifth columns of Fig. 2. In each column, the top and bottom images correspond to one of the eigen-functions of the joint graph reshaped back to the size of the images. The red and blue shades represent the maxima and minima respectively, of the eigen-function. It is clear that, for each eigen-function pair (i.e. images in a single column) the distribution and shapes of these eigen extrema correspond well between the two images and the image regions where this correspondence is strong is in agreement with the actually corresponding image regions. Thus, by computing features that encode these extrema (both in their shape and the eigenenergy profile), we can more robustly match these images without relying on descriptors computed directly from the images. The technical approach is organized as follows. First,
4 we will review basic fundamentals of the image graph construction and its spectrum, followed by a look at the actual features we use to build the joint image graph. Then, we will characterize the eigen-function extrema as persistent regions and discuss algorithms to detect and match these extrema Image Graph The spectral analysis of the content of an image is carried out on a weighted image graph G(V,E,W) which contains all the image-pixels as vertices in the vertex-set V of cardinality n. The edge-set E contains all pair-wise relationships between every pair of vertices (pixels) in the set V thus making G a complete graph. The weight w ij 0 associated with an edge (v i,v j ) E encodes the affinity between the pixels represented by vertices v i and v j. We can collect these weights into an n n affinity matrix W =(w ij ) i,j=1,...,n. The degree matrix D of this graph is defined as a diagonal matrix D with D(i, i) = n j=1 w ij. Using W and D, we can now compute the normalized graph laplacian L as L = I D 1/2 WD 1/2. We are interested in the eigen-spectra U of this laplacian matrix which can be computed by eigen-value decomposition LŪ = λū and setting U = D 1/2 Ū. The eigen-vectors u 1,...,u K corresponding to the K smallest eigen-values are related to the structure of the graph [10] and are extensively used in the literature to obtain a K partition of an image based on appropriately defined weight values. However, in this paper, we will study the individual eigen-vectors directly to ascertain useful persistent regions in the image. The formulation above can be easily extended from a single image to a pair of images as follows. Let G 1 (V 1,E 1,W 1 ) and G 2 (V 2,E 2,W 2 ) be the image graphs for images I 1 and I 2. Then the joint image graph G(V,E,W) is defined such that V = V 1 V 2, E = E 1 E 2 V 1 V 2 where V 1 V 2 is the set of edges connecting every pair of vertices in (V 1,V 2 ). The affinity matrix W is given by: ( ) W1 C W = C t (1) W 2 (n 1 +n 2 ) (n 1 +n 2 ) where V 1 = n 1, V 2 = n 2 and C is the n 1 n 2 matrix encoding the affinities of edges in V 1 V 2. The eigenspectra for the joint graph can be computed exactly as before by defining the normalized laplacian L and carrying out its eigen-value decomposition Image Features and the Joint Spectrum Consider first an experiment where we perform spectral analysis of the joint image graph G(V,E,W) with the matrix W defined directly in terms of the pixel color values in the two images, i.e. both the intra-image weights W 1, W 2 as well as the inter-image weights C are defined by a function of the perceptually uniform Lab-space color difference between the pixel pair. Now, we compute the eigenspectra of this graph s laplacian to see if the corresponding eigen-functions show any patterns of correspondence. Fig. 3 shows the second through fifth eigen-function pairs (reshaped back into a matrix) for the same image pair as in Fig. 2 obtained using the above Lab-based graph. It is clear that we do not see much correspondence between the eigenfunctions in this case this motivates the need for features stronger than just the individual pixel colors. Features that encode local image gradients are good candidates as they provide a soft metric on the salient regions without needing a hard-thresholding step needed by edge and contour detectors. In this paper, we propose to use SIFT [4] descriptors computed densely on the image at a fixed spatial sampling σ (we use σ =5pixels for experiments in this paper). To capture local image gradients at multiple scales, at each location we compute the SIFT descriptors at two different scales (size of the SIFT spatial bin) s 1 and s 2. The resulting feature vectors are concatenated to result in a 256 D feature vector f i (x) at each location x in image I i. Taking into account the spatial sampling of the features σ, let n 1 and n 2 be the number of feature vectors obtained from images I 1 and I 2 respectively. Then the affinity matrices W 1, W 2 and C are defined as follows: ( ) (W i ) x,y =exp f i(x) f i (y) 2 (2) σ 2 f ( ) (C) x,y =exp f i(x) f j (y) 2 σf 2 where f i (x) and f i (y) are features at locations x and y in image I i. We use the cosine-distance as the feature distance function. with tuning parameter σ f set to 1.0 in all our experiments. The scales s 1 and s 2 were set to 10 and 6 respectively for all the experiments. Note that unlike most image-domain spectral approaches in the literature, we do not use a spatial affinity term to reduce the influence of spatially separated pixels. In fact, supporting long range interactions is a key component of our approach as this allows us to obtain more distinctive profiles in the computed eigen-functions. With a spatial proximity term in the affinity matrix, we run the risk of artificially limiting the spatial extent of an eigen-function extrema and thus rendering the derived features less distinctive. Given the joint graph affinity matrix W from eqns-(1), (2) and (3), it is straightforward to compute the eigenspectra. But before we do that, let us see if we can determine any correspondence information between image regions by extracting the spectra from each image graph separately. Fig. 4 shows the eigen-functions obtained by spectral analysis of the image graphs of the top and bottom row im- (3)
5 ages independently. Even though the eigen-functions correctly represent the grouping of gradient information as is expected from our gradient features, one cannot infer useful correspondence information between image regions from the corresponding pair of eigen-functions directly. Now, we can go back and look at the eigen-function pairs in Fig. 2. These were obtained as the eigen-vectors u 1,...,u 5 corresponding to the smallest K = 5 eigenvalues of the eigen-value decomposition LU = λu. From each n 1 + n 2 dimensional eigen-vector u k, we compute an eigen-function pair (J (k) 1,J (k) 2 ) as follows. The first n 1 entries of u k are reshaped to the dimensions of I 1 by assigning its component values to the sampling locations where the features were extracted from and then interpolating the values in between. Similarly, the next n 2 entries of u k are reshaped to the dimensions of I 2 leading to the eigen-function J (k) Characterization of persistent regions As discussed before, the extrema of the eigen-function pairs (J (2) 1,J(2) (5) 2 ),...,(J 1,J(5) 2 ) represent persistent features that can serve well as means of finding correspondences across these difficult pairs of images. We want to characterize these extrema in terms of their location, their region of support as well as the variation of the eigen-energy in the vicinity of each extrema. Since the extrema can commonly exhibit elongated ridge-like shapes, an isotropic blob-detector would not work well. The continuous nature of the eigen-functions suggests that a water-shed like algorithm would serve as a good detector that might find both the location as well as the support region for these extrema. Therefore, we found the well known feature detection algorithm the Maximally Stable Extremal Region (MSER) detector [5] to be suitable for this purpose. The intensity-based MSER detector is typically used to find affine-covariant regions in an image by looking for water-shed areas that remain stable as an image intensity threshold is varied. Each detected region is a set of connected pixels to which an ellipse is typically fit to represent the support region. To apply the MSER detector, we first normalize each eigen-function J (k) 1 (and J (k) 2 ) to a range of [0, 255] by scale and offset correction. Then, we run intensity-based MSER along with ellipse fitting to detect stable affine regions. All the eigen-function figures in this paper depict these regions as green or magenta ellipses corresponding to maxima and minima respectively. To represent the eigen-energy variation around each detected MSER region, a number of different descriptors can be used. Through empirical evaluation, we have found the SIFT [4] descriptor to work well. Each detected MSER ellipse is affine corrected to a circular region and a SIFT descriptor is computed for a region five times the ellipse size by computing gradients on the eigen-function. The large Algorithm 1 JSPEC Algorithm 1. Compute features f 1 (x) and f 2 (x) at a spatial sampling σ for I 1 and I Compute affinity matrix W using eqns-(1), (2) and (3). 3. Compute the K smallest eigen-vectors u 1,...,u K for W. 4. Extract eigen-function pairs (J (k) 1,J (k) 2 ) from each u k. 5. Detect MSER features and compute SIFT descriptors for each (J (k) 1,J (k) 2 ). 6. Match features from each (J (k) 1,J (k) 2 ) by bi-directional SIFT matching. 7. Collect matches from all K eigen-functions to get the final match set. spatial extent of the SIFT window allows us to capture the eigen-energy profile more distinctly while still finding corresponding features between the eigen-function pairs. We will use the term JSPEC to refer to this feature which combines MSER ellipse keypoint with the eigen-space SIFT descriptor Eigen-function feature matching The centroids of the MSER ellipses along with their associated SIFT descriptors can be treated as image features in a traditional sense. Therefore, we adopt a simple approach to matching these features by using the nearestneighbor criterion coupled with the ratio-test [4]. However, we match the descriptors from each pair of eigen-functions (J (k) 1,J (k) 2 ) independently i.e. for each descriptor in J (k) 1, the nearest and second-nearest descriptors are searched only in J (k) 2 and the association to the nearest descriptor is accepted only if its euclidean descriptor distance is less than τ times the distance to the second-nearest descriptor. To enforce a stronger match criterion, we perform matching from J (k) 1 to J (k) 2 and from J (k) 2 to J (k) 1 and keep the matches which are mutually consistent. This gives us a set of correspondences C k from the eigen-function pair (J (k) 1,J (k) 2 ). It should be noted that unlike traditional SIFT feature matching, our constraint on being able to match between individual eigen-function pairs results in a much stronger match criterion. Algorithm. We present our method in a reproducible algorithmic form in Alg Experiments We evaluate our approach on the dataset of challenging image pairs from [3]. This dataset contains 46 pairs of images exhibiting dramatic illumination, age and rendering style differences. Some image pairs are pre-registered with a homography to focus on appearance differences, while others exhibit both geometric and photometric variation. For each image pair, a manually extracted ground-truth homography H 12 is included with the dataset. Hauagge and Snavely [3] evaluated their local symmetry features first, in terms of the detector repeatability and second, in terms of descriptor mean-average-precision performance. In our evaluation, we follow their methodology and evaluation metrics closely and provide a thorough comparison of our JSPEC features with their SYM-I and SYM-G

![Descriptor mean average precision (map) evaluation and comparison with [3]. features. 4.1.](/docs-images/75/72824423/images/6-1.jpg "Detector repeatability To evaluate the repeatability of the eigen-space MSER features for a given image pair, we consider all the detections before the SIFT matching step.")
6 Scale Score MSER SIFT (DoG) SYM-I SYM-G JSPEC Table 1. Detector repeatability compared with [3]. GRID SIFT SYM-I SYM-G JSPEC Self-Sim SIFT SYMD SIFT-SYMD Table 2. Descriptor mean average precision (map) evaluation and comparison with [3]. features Detector repeatability To evaluate the repeatability of the eigen-space MSER features for a given image pair, we consider all the detections before the SIFT matching step. We collect all the features from across all eigen-functions into two sets of keypoints K 1 and K 2 for images I 1 and I 2 respectively. Each keypoint has a centroid and an ellipse associated with it. Therefore, we can directly apply the repeatability metric from [6] which we briefly review next. Each keypoint k 1 K 1 is warped into I 2 s coordinate frame using the ground-truth homography H 12 and its (warped) support region is compared with the support region of each keypoint k 2 K 2 to obtain an overlap score. If the overlap score is more than 0.6 (i.e. less than 40% overlap error), then we count the associated keypoint-pair as a correct detection. The ratio of the correct detections to the smaller of the number of keypoints in either image is used as the measure of detector repeatability. To be invariant to absolute keypoint scales, the keypoints in I 1 are rescaled by a factor s to a fixed area A before applying the homography. The same scale s is applied to the keypoints in I 2 before determining the overlap score. Hauagge and Snavely [3] computed the repeatability scores of their features by considering subsets of top-100 and top-200 detections ordered by either feature scale or score. This was done to avoid a bias when comparing to detectors that produce a large number of keypoints. Our MSER detector does not output a detection score and so we only present repeatability numbers based on ordering by scale. These are shown in Table-1 where we have also reproduced numbers from [3] for ease of comparison. We observe that our JSPEC features achieve slightly better repeatability than what SYM-G achieved using the top scoring 200 detections. Figure 5. Painting to image matching. The painting images (toprow) have been taken from the dataset in [8] Descriptor Evaluation We evaluate the discriminative power of our eigen-space SIFT descriptors in a manner similar to [3]. Here again, we consider the descriptors associated with all the features (i.e. before the matching step) collected together from all the eigen-functions. Then, we match these descriptors using the standard ratio test [4] on the top two nearest neighbor distances. For a given choice of the ratio threshold, we get a set of candidate correspondences which are evaluated with the ellipse overlap criterion of [6] using the ground-truth homography H 12 to compute a point on the precision-recall curve. By varying the ratio-test threshold, we can trace the full precision-recall curve. Fig.6 compares the performance of our JSPEC features against each of the features studied by [3] 2. Note that the JSPEC plots across each column are exactly the same since we do not vary the detector. We have plotted them four times to allow comparison with the individual plots from [3]. The first four image pairs show a substantial improvement in performance over other competing methods. The first row of plots ( Grid ) represents a synthetic detector experiment in [3] where locations on a uniform grid in I 1 are chosen as K 1 and these locations warped by H 12 into I 2 are chosen as K 2. This is meant to test how well the descriptor matches appearance of perfect geometrically matching locations. Even though we do not use the grid-detector, a comparison of the JSPEC PR-curves with other curves in the Grid row clearly indicate that SIFT features computed on the eigen-functions match better across the extreme day-night appearance changes. The graffiti image pair (fifth column) shows that we perform similar to the SYMD descriptor on SIFT features but, as expected, worse than the SIFT detector-descriptor pair. Finally, the Taj example (last column) shows a failure case where our method fails because large parts of the scene have changed com- 2 The precision-recall data plotted here was obtained from the authors directly
7 SYM-G SYM-I SIFT Grid Recall SYMD SIFT-SYM SIFT JSPEC Figure 6. Precision-Recall curves comparing performance of the spectral approach (JSPEC) with the features evaluated in [3]. Each column shows plots for the image pair in the top row. For each image pair, the JSPEC curve is repeated in the four rows to show comparison with the four different detectors in [3]. pletely. In this case, a combination with SIFT features is likely to give better performance. Also note that we have not applied either the bi-directional matching criterion or the match only within each eigen-function pair criterion to obtain these precision-recall curves for a fair comparison with other methods (which also do not apply the bidirectional constraint). The performance is expected to be higher with these additional criteria. Table-2 compares our mean average precision with [3] on the entire dataset. We achieve an overall map of 0.61 which is higher than the synthetic grid-detector (combined with SIFT-SYMD descriptor) based map of 0.58 achieved by [3] Qualitative Results In Fig. 5 and Fig. 7, we show some qualitative outputs of our algorithm. The matches overlaid on the images are the final matches obtained after bi-directional SIFT matching on the JSPEC features at a ratio-threshold of 0.8. Fig. 5 shows two examples of paintings from the dataset shared by Shrivastava et al. [8] in the top row. We downloaded similar looking images from the web and tested our algorithm on this difficult painting to image matching task. The examples show the quality of our matches. Fig. 7 shows three more different kinds of examples with the correspondences detected in each of the four eigen-function pairs collected together and overlaid in the first column. In the first row, we have a difficult day-night pair where we find valid matches despite the poor contrast. The second row shows matching between a historic picture and a drawing. The third row shows the standard graffiti image pair with uncorrected perspective distortion that our method can easily cope with. Note the accuracy of the feature detections on the original images. 5. Conclusion Image matching across different illumination conditions and capture times has been addressed in the past by comparing descriptors of local neighborhoods or employing discriminative learning of local patches. In this paper we intro

 1,J(2) (5) 2 ),.")
.")






![Contour detection and hierarchical image segmentation. PAMI, 33(5):898 916, 2011. 1, 3 [2] D.](/docs-images/75/72824423/images/8-9.jpg "Glasner, S. Vitaladevuni, and R. Basri.")
![Contour-based joint clustering of multiple segmentations. In CVPR, 2011. 2 [3] D.](/docs-images/75/72824423/images/8-10.jpg "Hauagge and N. Snavely. Image matching using local symmetry features. In CVPR, 2012.")
![2, 3, 5, 6, 7, 8 [4] D. Lowe. Distinctive image features from scale-invariant keypoints.](/docs-images/75/72824423/images/8-11.jpg "IJCV, 60(2):91 110, 2004. 4, 5, 6 [5] J. Matas, O. Chum, M. Urban, and T. Pajdla.")
:761 767, 2004. 5 [6] K. Mikolajczyk, T. Tuytelaars, C.")
:43 72, 2005. 6 [7] E. Shechtman and M.")
![Irani. Matching local self-similarities across images and videos. In CVPR, 2007. 2 [8] A.](/docs-images/75/72824423/images/8-14.jpg "Shrivastava, T. Malisiewicz, A. Gupta, and A. A. Efros.")
8 Figure 7. The first column shows an image-pair from the dataset in [3] along with the correspondences assembled from the individual eigenfunctions. Second through fifth columns show eigen-function pairs (J (2) 1,J(2) (5) 2 ),...,(J 1,J(5) 2 ) along with the MSER feature-ellipses that have been matched using the SIFT-bidirectional matching criterion (τ =0.8). duced global image information into the matching process by computing the spectrum of the graph of all pixels in both images associated only by the similarity of their neighborhoods. Significantly, the eigen-functions of this joint graph exhibit persistent regions across disparate images which can be captured with the MSER characteristic point detector and represented with the SIFT descriptor in the resulting stable regions. Such characteristic points exhibit surprisingly high repeatability and local similarity. In our ongoing work, we study how such persistent features can be used for testing geometric consistency, a task impossible when no correspondences can be established in the raw image domain. Establishing the two view geometry using these persistent features would also allow rephotography: establishing the same view for a photo today given a reference photo from the past. References [1] P. Arbelaez, M. Maire, C. Fowlkes, and J. Malik. Contour detection and hierarchical image segmentation. PAMI, 33(5): , , 3 [2] D. Glasner, S. Vitaladevuni, and R. Basri. Contour-based joint clustering of multiple segmentations. In CVPR, [3] D. Hauagge and N. Snavely. Image matching using local symmetry features. In CVPR, , 3, 5, 6, 7, 8 [4] D. Lowe. Distinctive image features from scale-invariant keypoints. IJCV, 60(2):91 110, , 5, 6 [5] J. Matas, O. Chum, M. Urban, and T. Pajdla. Robust wide-baseline stereo from maximally stable extremal regions. Image and Vision Computing, 22(10): , [6] K. Mikolajczyk, T. Tuytelaars, C. Schmid, A. Zisserman, J. Matas, F. Schaffalitzky, T. Kadir, and L. Gool. A comparison of affine region detectors. IJCV, 65(1):43 72, [7] E. Shechtman and M. Irani. Matching local self-similarities across images and videos. In CVPR, [8] A. Shrivastava, T. Malisiewicz, A. Gupta, and A. A. Efros. Datadriven visual similarity for cross-domain image matching. ACM Transaction of Graphics (TOG) (Proceedings of ACM SIGGRAPH ASIA), 30(6), , 6, 7 [9] A. Toshev, J. Shi, and K. Daniilidis. Image matching via saliency region correspondences. In CVPR, [10] U. Von Luxburg. A tutorial on spectral clustering. Statistics and computing, 17(4): , [11] S. Yu, R. Gross, and J. Shi. Concurrent object recognition and segmentation by graph partitioning. In Proc. NIPS, pages , ,
Local invariant features
 Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Local invariant features Tuesday, Oct 28 Kristen Grauman UT-Austin Today Some more Pset 2 results Pset 2 returned, pick up solutions Pset 3 is posted, due 11/11 Local invariant features Detection of interest
Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds
 9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
9 1th International Conference on Document Analysis and Recognition Detecting Printed and Handwritten Partial Copies of Line Drawings Embedded in Complex Backgrounds Weihan Sun, Koichi Kise Graduate School
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Motion illusion, rotating snakes
 Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Motion illusion, rotating snakes Local features: main components 1) Detection: Find a set of distinctive key points. 2) Description: Extract feature descriptor around each interest point as vector. x 1
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Local Image Features
 Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Local Image Features Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial This section: correspondence and alignment
Computer Vision for HCI. Topics of This Lecture
 Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Computer Vision for HCI Interest Points Topics of This Lecture Local Invariant Features Motivation Requirements, Invariances Keypoint Localization Features from Accelerated Segment Test (FAST) Harris Shi-Tomasi
Local features: detection and description. Local invariant features
 Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
Local features: detection and description Local invariant features Detection of interest points Harris corner detection Scale invariant blob detection: LoG Description of local patches SIFT : Histograms
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt.
 CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
CEE598 - Visual Sensing for Civil Infrastructure Eng. & Mgmt. Section 10 - Detectors part II Descriptors Mani Golparvar-Fard Department of Civil and Environmental Engineering 3129D, Newmark Civil Engineering
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Local features: detection and description May 12 th, 2015
 Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local features: detection and description May 12 th, 2015 Yong Jae Lee UC Davis Announcements PS1 grades up on SmartSite PS1 stats: Mean: 83.26 Standard Dev: 28.51 PS2 deadline extended to Saturday, 11:59
Local Features: Detection, Description & Matching
 Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
Local Features: Detection, Description & Matching Lecture 08 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr David Lowe Professor, University of British
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM INTRODUCTION
 A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
A NEW FEATURE BASED IMAGE REGISTRATION ALGORITHM Karthik Krish Stuart Heinrich Wesley E. Snyder Halil Cakir Siamak Khorram North Carolina State University Raleigh, 27695 kkrish@ncsu.edu sbheinri@ncsu.edu
Structure Guided Salient Region Detector
 Structure Guided Salient Region Detector Shufei Fan, Frank Ferrie Center for Intelligent Machines McGill University Montréal H3A2A7, Canada Abstract This paper presents a novel method for detection of
Structure Guided Salient Region Detector Shufei Fan, Frank Ferrie Center for Intelligent Machines McGill University Montréal H3A2A7, Canada Abstract This paper presents a novel method for detection of
SIFT - scale-invariant feature transform Konrad Schindler
 SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
SIFT - scale-invariant feature transform Konrad Schindler Institute of Geodesy and Photogrammetry Invariant interest points Goal match points between images with very different scale, orientation, projective
CS 4495 Computer Vision A. Bobick. CS 4495 Computer Vision. Features 2 SIFT descriptor. Aaron Bobick School of Interactive Computing
 CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
CS 4495 Computer Vision Features 2 SIFT descriptor Aaron Bobick School of Interactive Computing Administrivia PS 3: Out due Oct 6 th. Features recap: Goal is to find corresponding locations in two images.
Local features and image matching. Prof. Xin Yang HUST
 Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Local features and image matching Prof. Xin Yang HUST Last time RANSAC for robust geometric transformation estimation Translation, Affine, Homography Image warping Given a 2D transformation T and a source
Bundling Features for Large Scale Partial-Duplicate Web Image Search
 Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Feature descriptors. Alain Pagani Prof. Didier Stricker. Computer Vision: Object and People Tracking
 Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Feature descriptors Alain Pagani Prof. Didier Stricker Computer Vision: Object and People Tracking 1 Overview Previous lectures: Feature extraction Today: Gradiant/edge Points (Kanade-Tomasi + Harris)
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi
 Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Discovering Visual Hierarchy through Unsupervised Learning Haider Razvi hrazvi@stanford.edu 1 Introduction: We present a method for discovering visual hierarchy in a set of images. Automatically grouping
Specular 3D Object Tracking by View Generative Learning
 Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
Specular 3D Object Tracking by View Generative Learning Yukiko Shinozuka, Francois de Sorbier and Hideo Saito Keio University 3-14-1 Hiyoshi, Kohoku-ku 223-8522 Yokohama, Japan shinozuka@hvrl.ics.keio.ac.jp
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching
 Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Performance Evaluation of Scale-Interpolated Hessian-Laplace and Haar Descriptors for Feature Matching Akshay Bhatia, Robert Laganière School of Information Technology and Engineering University of Ottawa
Local Image Features
 Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
Local Image Features Computer Vision Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Flashed Face Distortion 2nd Place in the 8th Annual Best
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS
 SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
SUMMARY: DISTINCTIVE IMAGE FEATURES FROM SCALE- INVARIANT KEYPOINTS Cognitive Robotics Original: David G. Lowe, 004 Summary: Coen van Leeuwen, s1460919 Abstract: This article presents a method to extract
Prof. Feng Liu. Spring /26/2017
 Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Prof. Feng Liu Spring 2017 http://www.cs.pdx.edu/~fliu/courses/cs510/ 04/26/2017 Last Time Re-lighting HDR 2 Today Panorama Overview Feature detection Mid-term project presentation Not real mid-term 6
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Midterm Wed. Local features: detection and description. Today. Last time. Local features: main components. Goal: interest operator repeatability
 Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Midterm Wed. Local features: detection and description Monday March 7 Prof. UT Austin Covers material up until 3/1 Solutions to practice eam handed out today Bring a 8.5 11 sheet of notes if you want Review
Feature Based Registration - Image Alignment
 Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
Feature Based Registration - Image Alignment Image Registration Image registration is the process of estimating an optimal transformation between two or more images. Many slides from Alexei Efros http://graphics.cs.cmu.edu/courses/15-463/2007_fall/463.html
SCALE INVARIANT FEATURE TRANSFORM (SIFT)
") 1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
1 SCALE INVARIANT FEATURE TRANSFORM (SIFT) OUTLINE SIFT Background SIFT Extraction Application in Content Based Image Search Conclusion 2 SIFT BACKGROUND Scale-invariant feature transform SIFT: to detect
Requirements for region detection
 Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Region detectors Requirements for region detection For region detection invariance transformations that should be considered are illumination changes, translation, rotation, scale and full affine transform
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014
 SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
SIFT: SCALE INVARIANT FEATURE TRANSFORM SURF: SPEEDED UP ROBUST FEATURES BASHAR ALSADIK EOS DEPT. TOPMAP M13 3D GEOINFORMATION FROM IMAGES 2014 SIFT SIFT: Scale Invariant Feature Transform; transform image
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
Translation Symmetry Detection: A Repetitive Pattern Analysis Approach
 2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
2013 IEEE Conference on Computer Vision and Pattern Recognition Workshops Translation Symmetry Detection: A Repetitive Pattern Analysis Approach Yunliang Cai and George Baciu GAMA Lab, Department of Computing
DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors
 DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors 林彥宇副研究員 Yen-Yu Lin, Associate Research Fellow 中央研究院資訊科技創新研究中心 Research Center for IT Innovation, Academia
DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors 林彥宇副研究員 Yen-Yu Lin, Associate Research Fellow 中央研究院資訊科技創新研究中心 Research Center for IT Innovation, Academia
III. VERVIEW OF THE METHODS
 An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
An Analytical Study of SIFT and SURF in Image Registration Vivek Kumar Gupta, Kanchan Cecil Department of Electronics & Telecommunication, Jabalpur engineering college, Jabalpur, India comparing the distance
2D Image Processing Feature Descriptors
 2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
2D Image Processing Feature Descriptors Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Overview
AK Computer Vision Feature Point Detectors and Descriptors
 AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
AK Computer Vision Feature Point Detectors and Descriptors 1 Feature Point Detectors and Descriptors: Motivation 2 Step 1: Detect local features should be invariant to scale and rotation, or perspective
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Construction of Precise Local Affine Frames
 Construction of Precise Local Affine Frames Andrej Mikulik, Jiri Matas, Michal Perdoch, Ondrej Chum Center for Machine Perception Czech Technical University in Prague Czech Republic e-mail: mikulik@cmp.felk.cvut.cz
Construction of Precise Local Affine Frames Andrej Mikulik, Jiri Matas, Michal Perdoch, Ondrej Chum Center for Machine Perception Czech Technical University in Prague Czech Republic e-mail: mikulik@cmp.felk.cvut.cz
Local Image Features
 Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Local Image Features Ali Borji UWM Many slides from James Hayes, Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Overview of Keypoint Matching 1. Find a set of distinctive key- points A 1 A 2 A 3 B 3
Lecture 10 Detectors and descriptors
 Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Lecture 10 Detectors and descriptors Properties of detectors Edge detectors Harris DoG Properties of detectors SIFT Shape context Silvio Savarese Lecture 10-26-Feb-14 From the 3D to 2D & vice versa P =
Salient Visual Features to Help Close the Loop in 6D SLAM
 Visual Features to Help Close the Loop in 6D SLAM Lars Kunze, Kai Lingemann, Andreas Nüchter, and Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research
Visual Features to Help Close the Loop in 6D SLAM Lars Kunze, Kai Lingemann, Andreas Nüchter, and Joachim Hertzberg University of Osnabrück, Institute of Computer Science Knowledge Based Systems Research
Visual Representations for Machine Learning
 Visual Representations for Machine Learning Spectral Clustering and Channel Representations Lecture 1 Spectral Clustering: introduction and confusion Michael Felsberg Klas Nordberg The Spectral Clustering
Visual Representations for Machine Learning Spectral Clustering and Channel Representations Lecture 1 Spectral Clustering: introduction and confusion Michael Felsberg Klas Nordberg The Spectral Clustering
UNSUPERVISED OBJECT MATCHING AND CATEGORIZATION VIA AGGLOMERATIVE CORRESPONDENCE CLUSTERING
 UNSUPERVISED OBJECT MATCHING AND CATEGORIZATION VIA AGGLOMERATIVE CORRESPONDENCE CLUSTERING Md. Shafayat Hossain, Ahmedullah Aziz and Mohammad Wahidur Rahman Department of Electrical and Electronic Engineering,
UNSUPERVISED OBJECT MATCHING AND CATEGORIZATION VIA AGGLOMERATIVE CORRESPONDENCE CLUSTERING Md. Shafayat Hossain, Ahmedullah Aziz and Mohammad Wahidur Rahman Department of Electrical and Electronic Engineering,
Image Matching via Saliency Region Correspondences
 University of Pennsylvania ScholarlyCommons Departmental Papers CIS) Department of Computer & Information Science 007 Image Matching via Saliency Region Correspondences Alexander Toshev University of Pennsylvania
University of Pennsylvania ScholarlyCommons Departmental Papers CIS) Department of Computer & Information Science 007 Image Matching via Saliency Region Correspondences Alexander Toshev University of Pennsylvania
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Shape Descriptors for Maximally Stable Extremal Regions
 Shape Descriptors for Maximally Stable Extremal Regions Per-Erik Forssén and David G. Lowe Department of Computer Science University of British Columbia {perfo,lowe}@cs.ubc.ca Abstract This paper introduces
Shape Descriptors for Maximally Stable Extremal Regions Per-Erik Forssén and David G. Lowe Department of Computer Science University of British Columbia {perfo,lowe}@cs.ubc.ca Abstract This paper introduces
Speeding up the Detection of Line Drawings Using a Hash Table
 Speeding up the Detection of Line Drawings Using a Hash Table Weihan Sun, Koichi Kise 2 Graduate School of Engineering, Osaka Prefecture University, Japan sunweihan@m.cs.osakafu-u.ac.jp, 2 kise@cs.osakafu-u.ac.jp
Speeding up the Detection of Line Drawings Using a Hash Table Weihan Sun, Koichi Kise 2 Graduate School of Engineering, Osaka Prefecture University, Japan sunweihan@m.cs.osakafu-u.ac.jp, 2 kise@cs.osakafu-u.ac.jp
Local Features Tutorial: Nov. 8, 04
 Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
Local Features Tutorial: Nov. 8, 04 Local Features Tutorial References: Matlab SIFT tutorial (from course webpage) Lowe, David G. Distinctive Image Features from Scale Invariant Features, International
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
CAP 5415 Computer Vision Fall 01 Dr. Mubarak Shah Univ. of Central Florida Office 47-F HEC Lecture-5 SIFT: David Lowe, UBC SIFT - Key Point Extraction Stands for scale invariant feature transform Patented
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Viewpoint Invariant Features from Single Images Using 3D Geometry
 Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
Viewpoint Invariant Features from Single Images Using 3D Geometry Yanpeng Cao and John McDonald Department of Computer Science National University of Ireland, Maynooth, Ireland {y.cao,johnmcd}@cs.nuim.ie
A performance evaluation of local descriptors
 MIKOLAJCZYK AND SCHMID: A PERFORMANCE EVALUATION OF LOCAL DESCRIPTORS A performance evaluation of local descriptors Krystian Mikolajczyk and Cordelia Schmid Dept. of Engineering Science INRIA Rhône-Alpes
MIKOLAJCZYK AND SCHMID: A PERFORMANCE EVALUATION OF LOCAL DESCRIPTORS A performance evaluation of local descriptors Krystian Mikolajczyk and Cordelia Schmid Dept. of Engineering Science INRIA Rhône-Alpes
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Robotics Programming Laboratory
 Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Chair of Software Engineering Robotics Programming Laboratory Bertrand Meyer Jiwon Shin Lecture 8: Robot Perception Perception http://pascallin.ecs.soton.ac.uk/challenges/voc/databases.html#caltech car
Global localization from a single feature correspondence
 Global localization from a single feature correspondence Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology {fraunfri,bischof}@icg.tu-graz.ac.at
Global localization from a single feature correspondence Friedrich Fraundorfer and Horst Bischof Institute for Computer Graphics and Vision Graz University of Technology {fraunfri,bischof}@icg.tu-graz.ac.at
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels
 Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Training-Free, Generic Object Detection Using Locally Adaptive Regression Kernels IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIENCE, VOL.32, NO.9, SEPTEMBER 2010 Hae Jong Seo, Student Member,
Local Feature Detectors
 Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Local Feature Detectors Selim Aksoy Department of Computer Engineering Bilkent University saksoy@cs.bilkent.edu.tr Slides adapted from Cordelia Schmid and David Lowe, CVPR 2003 Tutorial, Matthew Brown,
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Image Feature Evaluation for Contents-based Image Retrieval
 Image Feature Evaluation for Contents-based Image Retrieval Adam Kuffner and Antonio Robles-Kelly, Department of Theoretical Physics, Australian National University, Canberra, Australia Vision Science,
Image Feature Evaluation for Contents-based Image Retrieval Adam Kuffner and Antonio Robles-Kelly, Department of Theoretical Physics, Australian National University, Canberra, Australia Vision Science,
SEARCH BY MOBILE IMAGE BASED ON VISUAL AND SPATIAL CONSISTENCY. Xianglong Liu, Yihua Lou, Adams Wei Yu, Bo Lang
 SEARCH BY MOBILE IMAGE BASED ON VISUAL AND SPATIAL CONSISTENCY Xianglong Liu, Yihua Lou, Adams Wei Yu, Bo Lang State Key Laboratory of Software Development Environment Beihang University, Beijing 100191,
SEARCH BY MOBILE IMAGE BASED ON VISUAL AND SPATIAL CONSISTENCY Xianglong Liu, Yihua Lou, Adams Wei Yu, Bo Lang State Key Laboratory of Software Development Environment Beihang University, Beijing 100191,
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 09 130219 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Feature Descriptors Feature Matching Feature
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Quasi-Dense Wide Baseline Matching Using Match Propagation
 Quasi-Dense Wide Baseline Matching Using Match Propagation Juho Kannala and Sami S. Brandt Machine Vision Group University of Oulu, Finland {jkannala,sbrandt}@ee.oulu.fi Abstract In this paper we propose
Quasi-Dense Wide Baseline Matching Using Match Propagation Juho Kannala and Sami S. Brandt Machine Vision Group University of Oulu, Finland {jkannala,sbrandt}@ee.oulu.fi Abstract In this paper we propose
Implementing the Scale Invariant Feature Transform(SIFT) Method
 Method") Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
Implementing the Scale Invariant Feature Transform(SIFT) Method YU MENG and Dr. Bernard Tiddeman(supervisor) Department of Computer Science University of St. Andrews yumeng@dcs.st-and.ac.uk Abstract The
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT. Recap and Outline
 EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
EECS150 - Digital Design Lecture 14 FIFO 2 and SIFT Oct. 15, 2013 Prof. Ronald Fearing Electrical Engineering and Computer Sciences University of California, Berkeley (slides courtesy of Prof. John Wawrzynek)
Vision and Image Processing Lab., CRV Tutorial day- May 30, 2010 Ottawa, Canada
 Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Spatio-Temporal Salient Features Amir H. Shabani Vision and Image Processing Lab., University of Waterloo, ON CRV Tutorial day- May 30, 2010 Ottawa, Canada 1 Applications Automated surveillance for scene
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Supervised texture detection in images
 Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
Supervised texture detection in images Branislav Mičušík and Allan Hanbury Pattern Recognition and Image Processing Group, Institute of Computer Aided Automation, Vienna University of Technology Favoritenstraße
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE
 OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
OCCLUSION BOUNDARIES ESTIMATION FROM A HIGH-RESOLUTION SAR IMAGE Wenju He, Marc Jäger, and Olaf Hellwich Berlin University of Technology FR3-1, Franklinstr. 28, 10587 Berlin, Germany {wenjuhe, jaeger,
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Discriminant Interest Points are Stable
 Appears in IEEE Conf. on Computer Vision and Pattern Recognition, Minneapolis, 27. Discriminant Interest Points are Stable Dashan Gao Nuno Vasconcelos Department of Electrical and Computer Engineering
Appears in IEEE Conf. on Computer Vision and Pattern Recognition, Minneapolis, 27. Discriminant Interest Points are Stable Dashan Gao Nuno Vasconcelos Department of Electrical and Computer Engineering
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
CS 664 Segmentation. Daniel Huttenlocher
 CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
CS 664 Segmentation Daniel Huttenlocher Grouping Perceptual Organization Structural relationships between tokens Parallelism, symmetry, alignment Similarity of token properties Often strong psychophysical
3 October, 2013 MVA ENS Cachan. Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos
 Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
Machine Learning for Computer Vision 1 3 October, 2013 MVA ENS Cachan Lecture 2: Logistic regression & intro to MIL Iasonas Kokkinos Iasonas.kokkinos@ecp.fr Department of Applied Mathematics Ecole Centrale
CS 1674: Intro to Computer Vision. Midterm Review. Prof. Adriana Kovashka University of Pittsburgh October 10, 2016
 CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
CS 1674: Intro to Computer Vision Midterm Review Prof. Adriana Kovashka University of Pittsburgh October 10, 2016 Reminders The midterm exam is in class on this coming Wednesday There will be no make-up
Image matching. Announcements. Harder case. Even harder case. Project 1 Out today Help session at the end of class. by Diva Sian.
 Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Announcements Project 1 Out today Help session at the end of class Image matching by Diva Sian by swashford Harder case Even harder case How the Afghan Girl was Identified by Her Iris Patterns Read the
Structured Light II. Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov
 Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
Structured Light II Johannes Köhler Johannes.koehler@dfki.de Thanks to Ronen Gvili, Szymon Rusinkiewicz and Maks Ovsjanikov Introduction Previous lecture: Structured Light I Active Scanning Camera/emitter
A Comparison of Affine Region Detectors
 A Comparison of Affine Region Detectors K. Mikolajczyk 1, T. Tuytelaars 2, C. Schmid 4, A. Zisserman 1, J. Matas 3, F. Schaffalitzky 1, T. Kadir 1, L. Van Gool 2 1 University of Oxford, OX1 3PJ Oxford,
A Comparison of Affine Region Detectors K. Mikolajczyk 1, T. Tuytelaars 2, C. Schmid 4, A. Zisserman 1, J. Matas 3, F. Schaffalitzky 1, T. Kadir 1, L. Van Gool 2 1 University of Oxford, OX1 3PJ Oxford,
A Comparison and Matching Point Extraction of SIFT and ISIFT
 A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
A Comparison and Matching Point Extraction of SIFT and ISIFT A. Swapna A. Geetha Devi M.Tech Scholar, PVPSIT, Vijayawada Associate Professor, PVPSIT, Vijayawada bswapna.naveen@gmail.com geetha.agd@gmail.com
FAIR: Towards A New Feature for Affinely-Invariant Recognition
 FAIR: Towards A New Feature for Affinely-Invariant Recognition Radim Šára, Martin Matoušek Czech Technical University Center for Machine Perception Karlovo nam 3, CZ-235 Prague, Czech Republic {sara,xmatousm}@cmp.felk.cvut.cz
FAIR: Towards A New Feature for Affinely-Invariant Recognition Radim Šára, Martin Matoušek Czech Technical University Center for Machine Perception Karlovo nam 3, CZ-235 Prague, Czech Republic {sara,xmatousm}@cmp.felk.cvut.cz
DETECTORS AND DESCRIPTORS FOR PHOTOGRAMMETRIC APPLICATIONS
 DETECTORS AND DESCRIPTORS FOR PHOTOGRAMMETRIC APPLICATIONS KEY WORDS: Features Detection, Orientation, Precision Fabio Remondino Institute for Geodesy and Photogrammetry, ETH Zurich, Switzerland E-mail:
DETECTORS AND DESCRIPTORS FOR PHOTOGRAMMETRIC APPLICATIONS KEY WORDS: Features Detection, Orientation, Precision Fabio Remondino Institute for Geodesy and Photogrammetry, ETH Zurich, Switzerland E-mail:
CS 664 Slides #11 Image Segmentation. Prof. Dan Huttenlocher Fall 2003
 CS 664 Slides #11 Image Segmentation Prof. Dan Huttenlocher Fall 2003 Image Segmentation Find regions of image that are coherent Dual of edge detection Regions vs. boundaries Related to clustering problems
CS 664 Slides #11 Image Segmentation Prof. Dan Huttenlocher Fall 2003 Image Segmentation Find regions of image that are coherent Dual of edge detection Regions vs. boundaries Related to clustering problems
School of Computing University of Utah
 School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
School of Computing University of Utah Presentation Outline 1 2 3 4 Main paper to be discussed David G. Lowe, Distinctive Image Features from Scale-Invariant Keypoints, IJCV, 2004. How to find useful keypoints?
Using the Kolmogorov-Smirnov Test for Image Segmentation
 Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Using the Kolmogorov-Smirnov Test for Image Segmentation Yong Jae Lee CS395T Computational Statistics Final Project Report May 6th, 2009 I. INTRODUCTION Image segmentation is a fundamental task in computer
Detecting Multiple Symmetries with Extended SIFT
 1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
1 Detecting Multiple Symmetries with Extended SIFT 2 3 Anonymous ACCV submission Paper ID 388 4 5 6 7 8 9 10 11 12 13 14 15 16 Abstract. This paper describes an effective method for detecting multiple
Recognition of Degraded Handwritten Characters Using Local Features. Markus Diem and Robert Sablatnig
 Recognition of Degraded Handwritten Characters Using Local Features Markus Diem and Robert Sablatnig Glagotica the oldest slavonic alphabet Saint Catherine's Monastery, Mount Sinai Challenges in interpretation
Recognition of Degraded Handwritten Characters Using Local Features Markus Diem and Robert Sablatnig Glagotica the oldest slavonic alphabet Saint Catherine's Monastery, Mount Sinai Challenges in interpretation
Object Detection by Point Feature Matching using Matlab
 Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Object Detection by Point Feature Matching using Matlab 1 Faishal Badsha, 2 Rafiqul Islam, 3,* Mohammad Farhad Bulbul 1 Department of Mathematics and Statistics, Bangladesh University of Business and Technology,
Edge and Texture. CS 554 Computer Vision Pinar Duygulu Bilkent University
 Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
Edge and Texture CS 554 Computer Vision Pinar Duygulu Bilkent University Filters for features Previously, thinking of filtering as a way to remove or reduce noise Now, consider how filters will allow us
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,