How Simscape Supports Innovation for Cyber-Physical Systems
|
|
|
- Juniper Mathews
- 6 years ago
- Views:
Transcription

1 How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1
2 How can we use system-level modelling to support innovative product design? 2



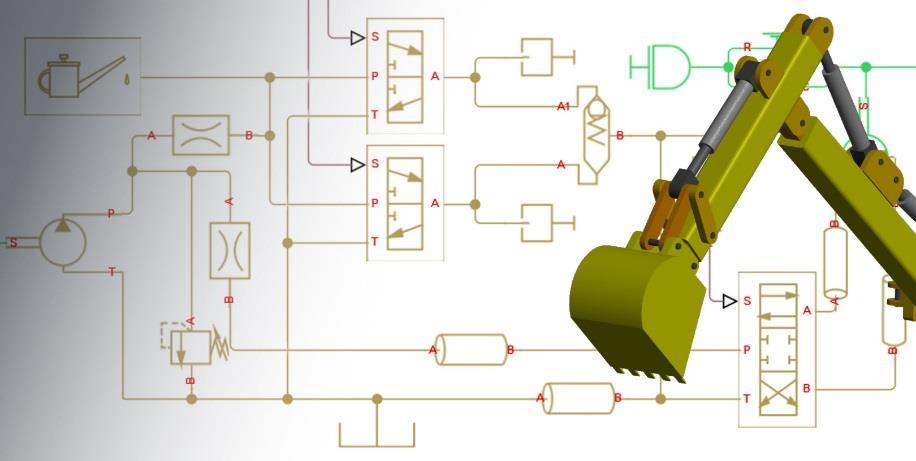
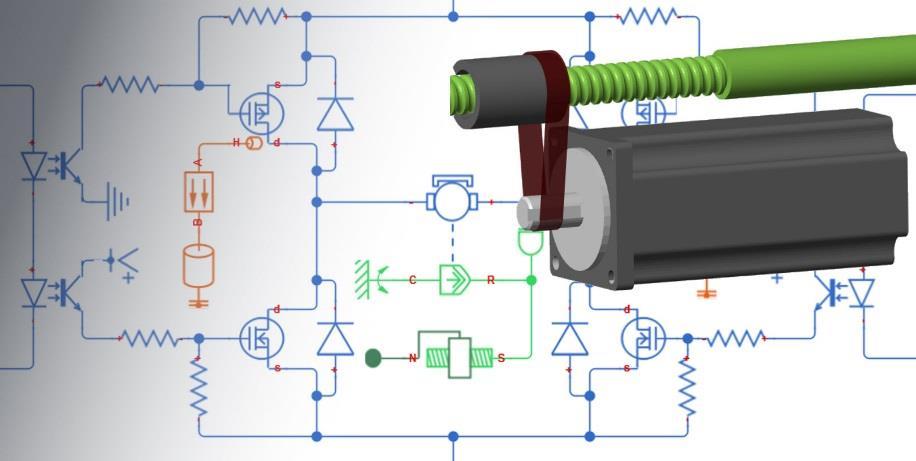
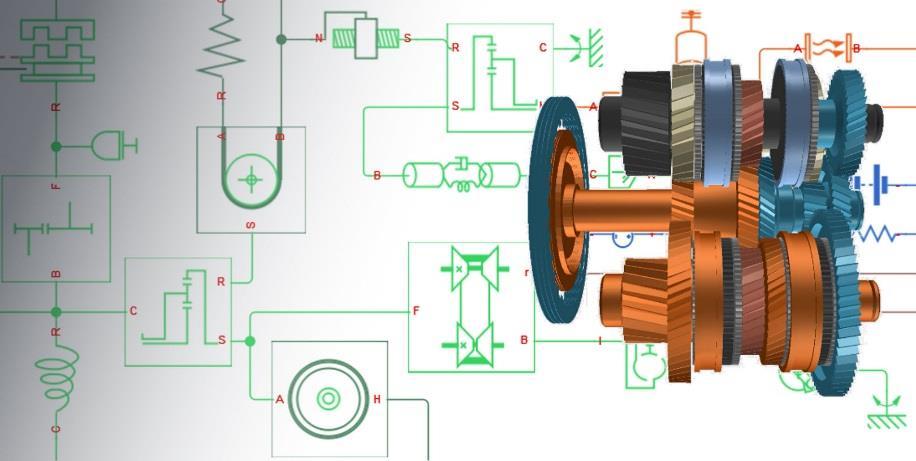
3 Innovation in electric and hybrid vehicles Electrical Mechanical Fluid 3

4 Innovation in robotics 4

5 Example: Quadruped running robot Biologically-inspired design (Biomimetics) Animal terrestrial motion Muscles are inefficient (30%) Muscles are also the energy store Running gait uses kinetic energy recovery The leg is well modelled by a linear spring v Innovation: Use equivalent inverted pendulum model as basis for robot u y x p 5
 stiffness Stance height Simple point-mass model MATLAB script for trade-off")
6 v Running robot design example Design step #1 gait selection u Fixed parameters Leg length y x p Running speed Mass Design parameters Leg (spring) stiffness Stance height Simple point-mass model MATLAB script for trade-off 6

7 Running robot design example Design step #2 actuator requirements from inverse dynamics 7
8 Running robot design example Design step #3 actuator selection Provide actuation force Hydraulic Chemical Rotary electric motor Linear Electric motor Pneumatic Hydraulic motor Hydraulic actuator Artificial muscle IC engine Brushed Brushless Linear Rotary DC motor Induction motor Pneumatic cylinder Limited travel rotary Shunt motor Servo motor (PM rotor) Air muscle Pneumatic motor Series wound motor Variable reluctance 8

9 Running robot design example Design step #3 actuator selection 9


10 Running robot design example Design step #4 actuation validation 10
11 Running robot design example Design step #5 evaluation Motor efficiency at rated load = 95% Motor efficiency for trotting gait = 84% 11

12 Running robot design example Design step automation using MATLAB scripting Automation permits greater understanding of design trade-offs e.g. see effect of gearbox ratio on efficiency Gear ratio Efficiency 84% 81% 78% 12
13 Running robot design example Key points 1. Multiple models 2. Each model matched to a design task 3. Design data passed between models 4. Automation to support analysis & optimisation 5. Code generation for HIL testing Enables product design innovation in a way that starting with the CAD tool could never do 13
14 Building the right model for the task at hand can be challenging Requirements not understood by project management Identification of required modelling detail 14
15 Modeling detail Identify required modelling detail for PMSM drives 1. System-level simulation Torque-speed behaviour Model motor losses as part of overall efficiency calculation Thermal & fault modelling 2. Component validation Ensure motor stays within manufacturer operating limits Detailed analysis of impact on other components e.g. power harmonics 3. Component design Motor and/or drive circuitry Determine overall actuation losses Understand/predict fault behaviour Mechanical/ control engineer Motor designer and electronics engineer 15
16 Building the right model for the task at hand can be challenging Requirements not understood by project management Identification of required modelling detail Limited time and nothing to build on starting from scratch Lacking domain knowledge 16




17 Simscape library components provide a useful starting point and encapsulate some domain knowledge Modeling detail 17
18 Building the right model for the task at hand can be challenging Requirements not understood by project management Identification of required modelling detail Limited time and nothing to build on starting from scratch No data Lacking domain knowledge 18

19 Modelling a PMSM with limited supplier data Tune to measurement data See PMSM parameter identification example in Track 2 at 16:15pm 19
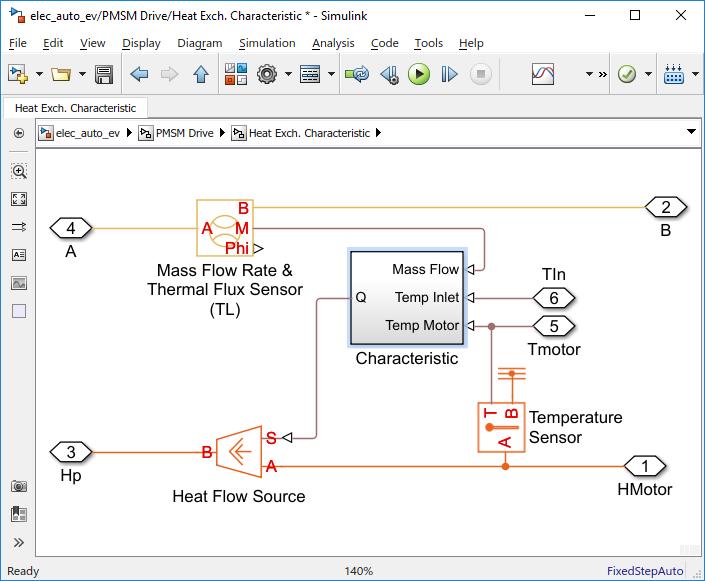
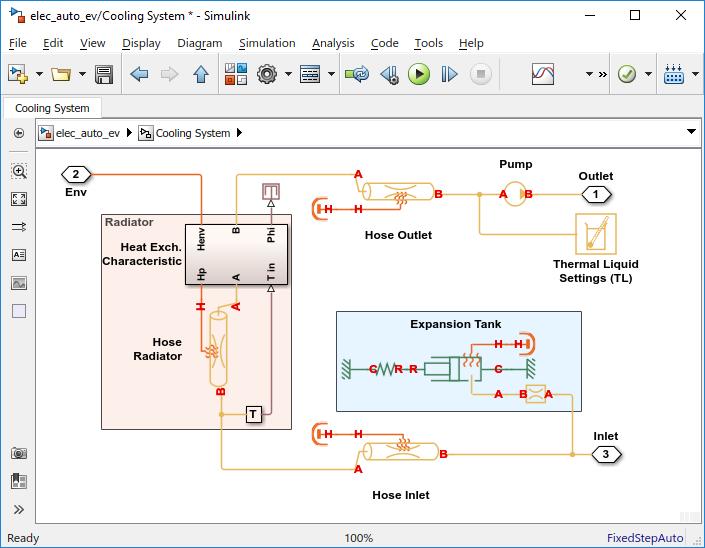
20 Using abstraction to deal with limited data R2017a/R2017b: elec_auto_ev.slx R2016b/R2016a/R2015b: elec_electric_vehicle.slx 24
21 Multidomain example with fluids 25
22 26

23 27
24 28
25 29
26 30

27 31
28 32
29 Building the right model for the task at hand can be challenging Requirements not understood by project management Identification of required modelling detail Limited time and nothing to build on starting from scratch No data Lacking domain knowledge 33
30 Building the right model for the task at hand can be challenging Requirements not understood by project management No data Identification of required modelling detail Limited time and nothing to build on starting from scratch Lacking domain knowledge 34


31 Simscape libraries enable you to build representative models fast 35
32 Creating custom Simscape components Example: McKibben air muscle Steps: 1. Write out defining equations 2. Find starting point in Simscape foundation library 3. Incrementally add functionality, testing as you go McKibben air muscle Increase pressure 36
33 Creating custom Simscape components Step 1: Write out equations L u = Un-stretched length L s = Additional stretch due to force, F Assumptions: Volume is approximately constant Stretch force is proportional to L s p 1 F L u (p 1 ) L s Equations: L = L u p + L s F = k L s pv = nrt p 2 L u (p 2 ) 37


34 Creating custom Simscape components Step 2: Find starting point from foundation library Has equation of state Need to add mechanical ports & equations 38
35 Creating custom Simscape components Step 3: Incrementally add functionality Add: Two mechanical ports Two additional new equations L = L u p + L s F = k L s 39

36 Creating custom Simscape components Step 3: Incrementally add functionality Add definitions for: Variables Parameters 40


37 Creating custom Simscape components Step 4: Build library and run test model 41
38 Why use Simscape? 42

39 Why use Simscape? Plant and control 43
40 Why use Simscape? Plant and control Multidomain Electrical Mechanical Thermal Fluid 44
41 Why use Simscape? Plant and control Multidomain Code generation and V&V tools Test controller on HIL plant Deploy to simulator Use plant model in real-time controller 45
42 Why use Simscape? Plant and control Multidomain Code generation and V&V tools Libraries, examples, documentation & webinars 46
43 Why use Simscape? Plant and control Multidomain Code generation and V&V tools Libraries, examples, documentation & webinars Simscape language build custom components p F 47

44 Why use Simscape? Plant and control Multidomain Code generation and V&V tools Libraries, examples, documentation & webinars Simscape language build custom components Workflow Tight integration with MathWorks control and optimization tools MATLAB for scripting and automation Fault-capable components (R, L, C, Servomotor, ) 48
45 Why use Simscape? Plant and control Multidomain Code generation and V&V tools Libraries, examples, documentation & webinars Simscape language build custom components Workflow Tight integration with MathWorks control and optimization tools MATLAB for scripting and automation Fault-capable components (R, L, C, Servomotor, ) Support, training, consulting MATLAB Central 49
46 How to find out more MathWorks physical modelling page: Steve Miller s introduction video MATLAB Central File Exchange Contact us direct 50
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Matlab Simulink Simscape
 Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Modeling and Simulation of Electromechanical Systems
 Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
Real-Time Simulation of Simscape Models
 2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
Plant modeling: A First Step to Early Verification of Control Systems
 Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape
 Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
System modeling using Simulink and Simscape
 System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
Physical Modeling of Multi-Domain System
 1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt
 Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Developing a Robot Model using System-Level Design
 Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks
 Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks 1 2013 The MathWorks, Inc. What s great about simulation? 2 What s great about simulation?
Modelling, Simulation, and Real-Time Testing for Model-Based Design GianCarlo Pacitti Application Engineer MathWorks 1 2013 The MathWorks, Inc. What s great about simulation? 2 What s great about simulation?
MECHATRONICS. William Bolton. Sixth Edition ELECTRONIC CONTROL SYSTEMS ENGINEERING IN MECHANICAL AND ELECTRICAL PEARSON
 MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
Mechanical Design Challenges for Collaborative Robots
 Motor Technologies Mechanical Design Challenges for Collaborative Robots TN-3301 REV 170526 THE CHALLENGE Robotics and additive manufacturing markets have entered into a new phase of growth. This growth
Motor Technologies Mechanical Design Challenges for Collaborative Robots TN-3301 REV 170526 THE CHALLENGE Robotics and additive manufacturing markets have entered into a new phase of growth. This growth
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
A Cost Oriented Humanoid Robot Motion Control System
 Preprints of the 19th World Congress The International Federation of Automatic Control A Cost Oriented Humanoid Robot Motion Control System J. Baltes*, P. Kopacek**,M. Schörghuber** *Department of Computer
Preprints of the 19th World Congress The International Federation of Automatic Control A Cost Oriented Humanoid Robot Motion Control System J. Baltes*, P. Kopacek**,M. Schörghuber** *Department of Computer
Advanced AC Motor Control S/W Development Sang-Ho Yoon Senior Application Engineer The MathWorks
 Advanced AC Motor Control S/W Development Sang-Ho Yoon Senior Application Engineer The MathWorks 2012 The MathWorks, Inc. 1 Agenda Develop ECUs with Model-Based Design Generate Application Code for Prototyping
Advanced AC Motor Control S/W Development Sang-Ho Yoon Senior Application Engineer The MathWorks 2012 The MathWorks, Inc. 1 Agenda Develop ECUs with Model-Based Design Generate Application Code for Prototyping
Simscape User s Guide. R2014a
 Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Project Proposal Guide MATHWORKS TRACK Disclaimer:
 Project Proposal Guide MATHWORKS TRACK Disclaimer: The sample proposal below is to give an idea of how a proposal should be formatted. Our main objective is to illustrate the Design Methodology section
Project Proposal Guide MATHWORKS TRACK Disclaimer: The sample proposal below is to give an idea of how a proposal should be formatted. Our main objective is to illustrate the Design Methodology section
CONSCIENCE TECHNOLOGIES A Right Platform For All Engineers... CODE B.TECH EEE MAT LAB PROJECT TITLE
 CODE B.TECH EEE MAT LAB PROJECT TITLE 2015-16 CT EEE 001 CT EEE 002 CT EEE 003 CT EEE 004 CT EEE 005 ACTIVE BUCK BOOST INVERTER FUZZY LOGIC CONTROLLER BASED SEPIC CONVERTER FOR MAXIMUM POWER POINT TRACKING
CODE B.TECH EEE MAT LAB PROJECT TITLE 2015-16 CT EEE 001 CT EEE 002 CT EEE 003 CT EEE 004 CT EEE 005 ACTIVE BUCK BOOST INVERTER FUZZY LOGIC CONTROLLER BASED SEPIC CONVERTER FOR MAXIMUM POWER POINT TRACKING
Design and Verification of Motion Control Algorithms Using Simulation
 Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Modeling Mechanical, Electric, and Hydraulic Systems in Simulink
 Modeling Mechanical, Electric, and Hydraulic Systems in Simulink 2006 The MathWorks, Inc. Terry Denery, Ph.D. Physics-Based Modeling Tools Physics-Based Modeling Methods Improve Control System Design u
Modeling Mechanical, Electric, and Hydraulic Systems in Simulink 2006 The MathWorks, Inc. Terry Denery, Ph.D. Physics-Based Modeling Tools Physics-Based Modeling Methods Improve Control System Design u
The Mathematical Model and Computer Simulation of a Quadruped Robot
 Research Experience for Undergraduates 2014 Milwaukee School of Engineering National Science Foundation Grant June 1- August 8, 2014 The Mathematical Model and Computer Simulation of a Quadruped Robot
Research Experience for Undergraduates 2014 Milwaukee School of Engineering National Science Foundation Grant June 1- August 8, 2014 The Mathematical Model and Computer Simulation of a Quadruped Robot
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel
 Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
2015 The MathWorks, Inc. 1 Realtime Simulation of Large- Scale Power System Using Multi- Core Realtime Machine 강효석과장 / Ph.D 2015 The MathWorks, Inc. 2 Renewable/Microgrid Series Topics Distributed and
Manipulation and Fluid Power. October 07, 2008
 2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
2008 TE Sessions Supported by Manipulation and Fluid Power October 07, 2008 www.robojackets.org Manipulation Keys to Understanding Manipulators What is a manipulator? What kinds of manipulators are there?
The new MiniCODER Absolute multi-talent for hollow shaft drives
 ABSOLUTE New LENORD +BAUER... automates motion. The new MiniCODER Absolute multi-talent for hollow shaft drives Innovative, absolute measuring MiniCODER Absolute position acquisition with magnetic measuring
ABSOLUTE New LENORD +BAUER... automates motion. The new MiniCODER Absolute multi-talent for hollow shaft drives Innovative, absolute measuring MiniCODER Absolute position acquisition with magnetic measuring
ESI ITI Academy. Courses and Contents
 ESI ITI Academy Courses and s SimulationX is a registered trademark of ESI ITI GmbH Dresden. ESI ITI GmbH, Dresden, Germany, 2017. All rights reserved. Doc. Vers. 07/2017 Preface ESI ITI Academy Dear Sir
ESI ITI Academy Courses and s SimulationX is a registered trademark of ESI ITI GmbH Dresden. ESI ITI GmbH, Dresden, Germany, 2017. All rights reserved. Doc. Vers. 07/2017 Preface ESI ITI Academy Dear Sir
MPS-GR Series. Mechanical-Bearing, Worm-Driven Rotary Stage. Low profile and compact with aperture. Precision worm-gear drive
 Rotary Stages Mechanical-Bearing, Worm-Driven Rotary Stage Low profile and compact with aperture Precision worm-gear drive DC servo or stepper motor Continuous 360 rotary positioning Graduated tabletop
Rotary Stages Mechanical-Bearing, Worm-Driven Rotary Stage Low profile and compact with aperture Precision worm-gear drive DC servo or stepper motor Continuous 360 rotary positioning Graduated tabletop
ABRT Series Air-Bearing Direct-Drive Rotary Stage
 ABRT Series Air-Bearing Direct-Drive Rotary Stage High torque output, direct-drive, slotless, brushless servomotor Zero cogging motor for outstanding velocity stability Outstanding error motion and wobble
ABRT Series Air-Bearing Direct-Drive Rotary Stage High torque output, direct-drive, slotless, brushless servomotor Zero cogging motor for outstanding velocity stability Outstanding error motion and wobble
Simulation. x i. x i+1. degrees of freedom equations of motion. Newtonian laws gravity. ground contact forces
 Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
Dynamic Controllers Simulation x i Newtonian laws gravity ground contact forces x i+1. x degrees of freedom equations of motion Simulation + Control x i Newtonian laws gravity ground contact forces internal
ABRT Series Air-Bearing Direct-Drive Rotary Stage
 ABRT Series Air-Bearing Direct-Drive Rotary Stage High torque output, direct-drive, slotless, brushless servomotor Zero cogging motor for outstanding velocity stability Outstanding error motion and wobble
ABRT Series Air-Bearing Direct-Drive Rotary Stage High torque output, direct-drive, slotless, brushless servomotor Zero cogging motor for outstanding velocity stability Outstanding error motion and wobble
Simulink as Your Enterprise Simulation Platform
 Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Table of Contents Introduction Historical Review of Robotic Orienting Devices Kinematic Position Analysis Instantaneous Kinematic Analysis
 Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Table of Contents 1 Introduction 1 1.1 Background in Robotics 1 1.2 Robot Mechanics 1 1.2.1 Manipulator Kinematics and Dynamics 2 1.3 Robot Architecture 4 1.4 Robotic Wrists 4 1.5 Origins of the Carpal
Hardware and Software Co-Design for Motor Control Applications
 Hardware and Software Co-Design for Motor Control Applications GianCarlo Pacitti Senior Application Engineer, MathWorks 2015 The MathWorks, Inc. 1 Agenda Why use Hardware and Software for motor control?
Hardware and Software Co-Design for Motor Control Applications GianCarlo Pacitti Senior Application Engineer, MathWorks 2015 The MathWorks, Inc. 1 Agenda Why use Hardware and Software for motor control?
4 Leg Air +Hydraulic Leveling System
 4 Leg Air +Hydraulic Leveling System Setup & Configuration Guide Operation Guide Air/Hydraulic FIRMWARE VERSIONS: CONTROLLER 2.18 FRONT SENSOR 2.6 REAR SENSOR 2.9 PNEUMATIC I/O MODULE 2.4 FIRMWARE VERSIONS:
4 Leg Air +Hydraulic Leveling System Setup & Configuration Guide Operation Guide Air/Hydraulic FIRMWARE VERSIONS: CONTROLLER 2.18 FRONT SENSOR 2.6 REAR SENSOR 2.9 PNEUMATIC I/O MODULE 2.4 FIRMWARE VERSIONS:
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Dynamics and Vibrations (3C, 3H) Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics
 Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics") Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Open Access The Kinematics Analysis and Configuration Optimize of Quadruped Robot. Jinrong Zhang *, Chenxi Wang and Jianhua Zhang
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Taibah University Mechanical Engineering
 Instructor: Chapter 2 Kinematics Fundamentals 1. Introduction 2. Degrees of Freedom 3. Types of Motion 4. Links, Joints, and Kinematic Chains 5. Determining Degree of Freedom Degree of Freedom in Planar
Instructor: Chapter 2 Kinematics Fundamentals 1. Introduction 2. Degrees of Freedom 3. Types of Motion 4. Links, Joints, and Kinematic Chains 5. Determining Degree of Freedom Degree of Freedom in Planar
Motion Analyzer 4.73 Release Notes
 Motion Analyzer 4.73 Release Notes Issues Resolved Motion Analyzer 4.73 1. Motion Analyzer Versions 4.6 through 4.72 will interfere with the installation of RSLogix 5000 software. This has been corrected
Motion Analyzer 4.73 Release Notes Issues Resolved Motion Analyzer 4.73 1. Motion Analyzer Versions 4.6 through 4.72 will interfere with the installation of RSLogix 5000 software. This has been corrected
How Real-Time Testing Improves the Design of a PMSM Controller
 How Real-Time Testing Improves the Design of a PMSM Controller Prasanna Deshpande Control Design & Automation Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Problem Statement: Design speed control
How Real-Time Testing Improves the Design of a PMSM Controller Prasanna Deshpande Control Design & Automation Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Problem Statement: Design speed control
Training Systems for Power Electronics
 Training Systems for Power Electronics The Key Technology for Electrical Drives Multimedia Learning, Experimenting, Programming and Researching Connection via USB and LN-Toolbox to Matlab /Simulink Making
Training Systems for Power Electronics The Key Technology for Electrical Drives Multimedia Learning, Experimenting, Programming and Researching Connection via USB and LN-Toolbox to Matlab /Simulink Making
Programmable Springs: Developing Actuators with Programmable Compliance for Autonomous Robots
 Programmable Springs: Developing Actuators with Programmable Compliance for Autonomous Robots Bill Bigge, Inman R. Harvey Centre for Computational Neuroscience and Robotics, University of Sussex, Brighton
Programmable Springs: Developing Actuators with Programmable Compliance for Autonomous Robots Bill Bigge, Inman R. Harvey Centre for Computational Neuroscience and Robotics, University of Sussex, Brighton
Electromechanical Materials Testing Machines EM0 series
 MICROTEST Electromechanical Materials Testing Machines EM0 MICROTEST - Electromechanical Materials Testing Machines EM0 series MICROTEST MICROTEST, S.A. Instruments and Equipments for Materials Testing
MICROTEST Electromechanical Materials Testing Machines EM0 MICROTEST - Electromechanical Materials Testing Machines EM0 series MICROTEST MICROTEST, S.A. Instruments and Equipments for Materials Testing
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Control 2. Keypoints: Given desired behaviour, determine control signals Inverse models:
 Control 2 Keypoints: Given desired behaviour, determine control signals Inverse models: Inverting the forward model for simple linear dynamic system Problems for more complex systems Open loop control:
Control 2 Keypoints: Given desired behaviour, determine control signals Inverse models: Inverting the forward model for simple linear dynamic system Problems for more complex systems Open loop control:
SOLIDWORKS SIMULATION
 SOLIDWORKS SIMULATION Innovation is about taking chances, not taking risks Scootchi by Curventa Designworks LTD What if? is the question that fuels innovation. SolidWorks Simulation software takes the
SOLIDWORKS SIMULATION Innovation is about taking chances, not taking risks Scootchi by Curventa Designworks LTD What if? is the question that fuels innovation. SolidWorks Simulation software takes the
CS 231. Control for articulate rigid-body dynamic simulation. Articulated rigid-body dynamics
 CS 231 Control for articulate rigid-body dynamic simulation Articulated rigid-body dynamics F = ma No control 1 No control Ragdoll effects, joint limits RT Speed: many sims at real-time rates on today
CS 231 Control for articulate rigid-body dynamic simulation Articulated rigid-body dynamics F = ma No control 1 No control Ragdoll effects, joint limits RT Speed: many sims at real-time rates on today
Development and Deployment of ECU based Control Systems through MBD. Imperative role of Model based design in System Engineering
 Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Sensor Accuracy in Vehicle Safety
 Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Sensor Accuracy in Vehicle Safety Sas Harrison Claytex Services Ltd. Leamington Spa UK Global Business: Software Support Consultancy Training Expertise: Modelica / C++ Software Simulation Libraries Systems
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
PVA2000 SELECTIVE CONFORMAL COATING SYSTEMS
 PVA2000 SELECTIVE CONFORMAL COATING SYSTEMS The PVA2000 A Cleaner Process With No Masking That s right. Now a cleaner, safer, and much more efficient conformal coating process is available with the PVA2000.
PVA2000 SELECTIVE CONFORMAL COATING SYSTEMS The PVA2000 A Cleaner Process With No Masking That s right. Now a cleaner, safer, and much more efficient conformal coating process is available with the PVA2000.
Industrial Training Zone (ITZ) eseries Courses
 eseries Courses") Industrial Training Zone (ITZ) eseries Courses LabVolt Series Datasheet Festo Didactic en 07/2018 Table of Contents General Description 2 2 Features & Benefits 2 List of Available Training Systems 2 Equipment
Industrial Training Zone (ITZ) eseries Courses LabVolt Series Datasheet Festo Didactic en 07/2018 Table of Contents General Description 2 2 Features & Benefits 2 List of Available Training Systems 2 Equipment
NPTEL
 NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
10/25/2018. Robotics and automation. Dr. Ibrahim Al-Naimi. Chapter two. Introduction To Robot Manipulators
 Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Robotics and automation Dr. Ibrahim Al-Naimi Chapter two Introduction To Robot Manipulators 1 Robotic Industrial Manipulators A robot manipulator is an electronically controlled mechanism, consisting of
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
SIMPACK - A Tool for Off-Line and Real- Time Simulation
 SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
SIMPACK - A Tool for Off-Line and Real- Time Simulation Real-Time for ECU Testing: State of the Art and Open Demands SIMPACK - Code Export: A Newly Emerging Module for Real-Time Models Application Example
USING OPTIMIZATION TECHNIQUES FOR THE DESIGN AND CONTROL OF FAST BIPEDS
 1 USING OPTIMIZATION TECHNIQUES FOR THE DESIGN AND CONTROL OF FAST BIPEDS T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, Germany E-mail: t.luksch@informatik.uni-kl.de
1 USING OPTIMIZATION TECHNIQUES FOR THE DESIGN AND CONTROL OF FAST BIPEDS T. LUKSCH and K. BERNS Robotics Research Lab, University of Kaiserslautern, Kaiserslautern, Germany E-mail: t.luksch@informatik.uni-kl.de
SYED AMMAL ENGINEERING COLLEGE
 Sem: 7 ME6702- Mechatronics Class: IV year Mechanical Book Reference: Two Marks and Answers 1. Dr.P.Marimuthu, G.Prabhakar and Dr.S.Selvaperumal, Mechatronics, Anuradha Publications 2016. Chapter 1: 1.
Sem: 7 ME6702- Mechatronics Class: IV year Mechanical Book Reference: Two Marks and Answers 1. Dr.P.Marimuthu, G.Prabhakar and Dr.S.Selvaperumal, Mechatronics, Anuradha Publications 2016. Chapter 1: 1.
M-Target for Simulink. For perfect simulation and model based design.
 M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Project Planning. Module 4: Practice Exercises. Academic Services Unit PREPARED BY. August 2012
 Project Planning PREPARED BY Academic Services Unit August 2012 Applied Technology High Schools, 2012 Module Objectives Upon successful completion of this module, students should be able to: 1. Select
Project Planning PREPARED BY Academic Services Unit August 2012 Applied Technology High Schools, 2012 Module Objectives Upon successful completion of this module, students should be able to: 1. Select
Quadruped Robots and Legged Locomotion
 Quadruped Robots and Legged Locomotion J. Zico Kolter Computer Science Department Stanford University Joint work with Pieter Abbeel, Andrew Ng Why legged robots? 1 Why Legged Robots? There is a need for
Quadruped Robots and Legged Locomotion J. Zico Kolter Computer Science Department Stanford University Joint work with Pieter Abbeel, Andrew Ng Why legged robots? 1 Why Legged Robots? There is a need for
SimMechanics Getting Started Guide. R2013b
 SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
What is Mechatronics
 Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
Mechatronics What is Mechatronics What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential
SimWise 4D. Integrated Motion and Stress Analysis
 SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
Clamping Systems. PClamp. PClamp N. PClamp E. Gewährleistung. Inhalt. RotoClamp. DiskClamp. LinClamp. PClamp
 Gewährleistung Inhalt N dvantages 1 Pneumatic clamping with high forces General information 2 Optimum safety clamping pneumatic failure locks the system The performance of hydraulic clamps will be achieved
Gewährleistung Inhalt N dvantages 1 Pneumatic clamping with high forces General information 2 Optimum safety clamping pneumatic failure locks the system The performance of hydraulic clamps will be achieved
DPO A4. Description. Module with 4 digital outputs. Datasheet
 DPO A4 Module with 4 digital outputs Datasheet Description Module with 4 digital outputs. Main characteristics: 4 digital outputs Maximum output current: 2 A for each output, 7 A total Overcurrent and
DPO A4 Module with 4 digital outputs Datasheet Description Module with 4 digital outputs. Main characteristics: 4 digital outputs Maximum output current: 2 A for each output, 7 A total Overcurrent and
Rotary Motion Servo Plant: SRV02. Rotary Experiment #00: QuaRC Integration. Using SRV02 with QuaRC. Student Manual
 Rotary Motion Servo Plant: SRV02 Rotary Experiment #00: QuaRC Integration Using SRV02 with QuaRC Student Manual SRV02 QuaRC Integration Instructor Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1
Rotary Motion Servo Plant: SRV02 Rotary Experiment #00: QuaRC Integration Using SRV02 with QuaRC Student Manual SRV02 QuaRC Integration Instructor Manual Table of Contents 1. INTRODUCTION...1 2. PREREQUISITES...1
Ball Screw Actuator Models Advantages:
 Ball Screw Actuator Models Advantages:! Move loads and apply force more efficiently than other mechanical actuators.! Permit faster operation and longer life under load.! Require less power by providing
Ball Screw Actuator Models Advantages:! Move loads and apply force more efficiently than other mechanical actuators.! Permit faster operation and longer life under load.! Require less power by providing
Online Gain Switching Algorithm for Joint Position Control of a Hydraulic Humanoid Robot
 Online Gain Switching Algorithm for Joint Position Control of a Hydraulic Humanoid Robot Jung-Yup Kim *, Christopher G. Atkeson *, Jessica K. Hodgins *, Darrin C. Bentivegna *,** and Sung Ju Cho * * Robotics
Online Gain Switching Algorithm for Joint Position Control of a Hydraulic Humanoid Robot Jung-Yup Kim *, Christopher G. Atkeson *, Jessica K. Hodgins *, Darrin C. Bentivegna *,** and Sung Ju Cho * * Robotics
Massachusetts Institute of Technology Department of Mechanical Engineering Modeling and Simulation of Dynamic Systems
 INTRODUCTION GOAL OF THE SUBJECT Massachusetts Institute of Technology Department of Mechanical Engineering 2.141 Modeling and Simulation of Dynamic Systems Methods for mathematical modeling of engineering
INTRODUCTION GOAL OF THE SUBJECT Massachusetts Institute of Technology Department of Mechanical Engineering 2.141 Modeling and Simulation of Dynamic Systems Methods for mathematical modeling of engineering
MDrive Linear Actuator
 MDrive Linear Actuator Compact, integrated all-in-one linear motion systems Hybrid Linear Actuator, Description MDrive Hybrid Linear Actuator MDrive Hybrid Linear Actuator,, non-captive and external shaft
MDrive Linear Actuator Compact, integrated all-in-one linear motion systems Hybrid Linear Actuator, Description MDrive Hybrid Linear Actuator MDrive Hybrid Linear Actuator,, non-captive and external shaft
Shape Optimization of a Curved Beam Hopping Robot
 Prof. Dr. Fumiya Iida Master-Thesis Shape Optimization of a Curved Beam Hopping Robot Autumn Term 2012 Supervised by: Nandan Maheshwari Xiaoxiang Yu Murat Reis Author: Dominik Naef Acknowledgments I would
Prof. Dr. Fumiya Iida Master-Thesis Shape Optimization of a Curved Beam Hopping Robot Autumn Term 2012 Supervised by: Nandan Maheshwari Xiaoxiang Yu Murat Reis Author: Dominik Naef Acknowledgments I would
Apprenticeship Curriculum Standard. Level 3. Trade Code: 447A
 Apprenticeship Curriculum Standard Instrumentation and Control Technician Level 3 Trade Code: 447A Development Date: 2008 Please Note: Apprenticeship Training and Curriculum Standards were developed by
Apprenticeship Curriculum Standard Instrumentation and Control Technician Level 3 Trade Code: 447A Development Date: 2008 Please Note: Apprenticeship Training and Curriculum Standards were developed by
200W ISCM4805 / 8005 INTELLIGENT SERVO CONTROL MODULES FEATURES DIGITAL MOTOR CONTROL FOR BRUSHLESS, DC BRUSH, LINEAR AND STEP MOTORS
 ISCM4805 / 8005 INTELLIGENT SERVO CONTROL MODULES DIGITAL MOTOR CONTROL FOR BRUSHLESS, DC BRUSH, LINEAR AND STEP MOTORS 200W The ISCM4805 and ISCM8005 are new Technosoft high-performance intelligent servo
ISCM4805 / 8005 INTELLIGENT SERVO CONTROL MODULES DIGITAL MOTOR CONTROL FOR BRUSHLESS, DC BRUSH, LINEAR AND STEP MOTORS 200W The ISCM4805 and ISCM8005 are new Technosoft high-performance intelligent servo
Kinematic Modeling of Quadruped Robot
 Kinematic Modeling of Quadruped Robot Smita A. Ganjare, V S Narwane & Ujwal Deole 1&2 K. J Somaiya College of Engineering, Mumbai University, Product Development, Larsen & Toubro LTD, Powai E-mail : smita.ganjare15@gmail.com,
Kinematic Modeling of Quadruped Robot Smita A. Ganjare, V S Narwane & Ujwal Deole 1&2 K. J Somaiya College of Engineering, Mumbai University, Product Development, Larsen & Toubro LTD, Powai E-mail : smita.ganjare15@gmail.com,
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems
 Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
Designing and Analysing Power Electronics Systems Using Simscape and SimPowerSystems Gernot Schraberger Industry Manager, Europe Industrial Automation & Machinery, Energy Production MathWorks 2012 The
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT
 SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
03 October Day Date Subjects. Wednesday 14 November 2018 Mathematics-I. Friday 16 November 2018 Programming for Problem Solving
 NOTICE / SCHOOL OF TECHNOLOGY MANAGEMENT & ENGINEERING MASTER OF BUSINESS ADMINISTRATION IN TECHNOLOGY MANAGEMENT (2018-23) YEAR: I, SEMESTER: I, SHIRPUR, INDORE & NAVI MUMBAI (Timings: 10.00 am - 1.00
NOTICE / SCHOOL OF TECHNOLOGY MANAGEMENT & ENGINEERING MASTER OF BUSINESS ADMINISTRATION IN TECHNOLOGY MANAGEMENT (2018-23) YEAR: I, SEMESTER: I, SHIRPUR, INDORE & NAVI MUMBAI (Timings: 10.00 am - 1.00
SimulationX The Powerful Simulation Software Package for the Future
 ARLA Simulation in Cooperation with ITI (SimulationX - Page 1) SimulationX The Powerful Simulation Software Package for the Future Introduction SimulationX is a standard software for valuation of the interaction
ARLA Simulation in Cooperation with ITI (SimulationX - Page 1) SimulationX The Powerful Simulation Software Package for the Future Introduction SimulationX is a standard software for valuation of the interaction
Thomas Bräunl EMBEDDED ROBOTICS. Mobile Robot Design and Applications with Embedded Systems. Second Edition. With 233 Figures and 24 Tables.
 Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Real Time Simulation of Complex Automatic Transmission Models. Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu
 Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
Real Time Simulation of Complex Automatic Transmission Models Marius Băţăuş, Andrei Maciac, Mircea Oprean, Nicolae Vasiliu 1 Introduction To manage the function of a vehicle s engine, transmission, and
27/05/2016 Friday AN5102: Advanced Digital System Design 06/06/2016 Monday MA5131: Applied Mathematics for Electronics Engineers
 04/06/2016 24/05/2016 25/05/2016 07/06/2016 27/05/2016 01/06/2016 09/06/2016 M.E. APPLIED ELECTRONICS 23/05/2016 Monday AN5104: Advanced Microprocessors and Microcontrollers AN5102: Advanced Digital System
04/06/2016 24/05/2016 25/05/2016 07/06/2016 27/05/2016 01/06/2016 09/06/2016 M.E. APPLIED ELECTRONICS 23/05/2016 Monday AN5104: Advanced Microprocessors and Microcontrollers AN5102: Advanced Digital System
A 6DOF Motion Platform with Permanent Magnet Linear Motors
 Transactions on Electrical Engineering, Vol. 3 (), No. A DO Motion Platform with Permanent Magnet Linear Motors Evžen Thöndel Department of Electric Drives and Traction, Czech Technical University in Prague,
Transactions on Electrical Engineering, Vol. 3 (), No. A DO Motion Platform with Permanent Magnet Linear Motors Evžen Thöndel Department of Electric Drives and Traction, Czech Technical University in Prague,
Stackable 4-BAR Mechanisms and Their Robotic Applications
 The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
The 010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-, 010, Taipei, Taiwan Stackable 4-BAR Mechanisms and Their Robotic Applications Hoyul Lee and Youngjin Choi Abstract
Courtesy of CMA/Flodyne/Hydradyne Motion Control Hydraulic Pneumatic Electrical Mechanical (800)
") Servo Drives The wide product range of LinMot servo drives allows the rapid implementation in applications from simple two position point to point movements up to complex, high-precision multi-axis synchronization
Servo Drives The wide product range of LinMot servo drives allows the rapid implementation in applications from simple two position point to point movements up to complex, high-precision multi-axis synchronization
Motion Product Overview
 SPECIALTY I/O POSITION SENSING MOTION CONTROL Motion Product Overview Advanced Micro Controls Inc Specialty I/O Position Sensing Motion Control Today s Agenda 1. Introduction 2. AMCI stepper products 3.
SPECIALTY I/O POSITION SENSING MOTION CONTROL Motion Product Overview Advanced Micro Controls Inc Specialty I/O Position Sensing Motion Control Today s Agenda 1. Introduction 2. AMCI stepper products 3.
Faculty of Mechanical Engineering B.E. Mechanical and Automation Engineering (R 2013) Semester III CE6461 Fluid Mechanics and Machinery Laboratory - I
 Semester III CE6461 Fluid Mechanics and Machinery Laboratory - I") (R 203) Semester III CE646 Fluid Mechanics and Machinery Laboratory - I. Orifice meter setup 2. Venturi meter setup 3. Rotameter setup 4. Pipe Flow analysis setup 5. Centrifugal pump/submergible pump setup
(R 203) Semester III CE646 Fluid Mechanics and Machinery Laboratory - I. Orifice meter setup 2. Venturi meter setup 3. Rotameter setup 4. Pipe Flow analysis setup 5. Centrifugal pump/submergible pump setup