Physical Modeling of Multi-Domain System
|
|
|
- Ashlie Boyd
- 5 years ago
- Views:
Transcription

1 1

2 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2
3 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing Gear Mechanism Modeling Refine requirement and optimize mechanical design Analyze hydraulic actuator designs Test system in various situations 3



4 4
5 physical modeling = Simulation models based on physical connections 5

6 6






7 7
8 too difficult 8



9 9

10 one chance 10



11 Courtesy NASA/JPL-Caltech 11



12 too big too difficult one chance ABB Optimizes Ship Energy Flows DCNS Simulates Handling System Lockheed Martin Develops MRO Courtesy NASA/JPL-Caltech 12
13 13
14 Makes modeling easy 14
 dt d 2 z Car dt 2 = F Spring F Shock m")
15 handles equations automatically F Spring = k Spring *(z Car ) F Shock = b Shock *( dz Car ) dt d 2 z Car dt 2 = F Spring F Shock m Car 15
16 handles equations automatically F Spring = k Spring *(z Car z Whl ) F Shock = b Shock *( dz Car dt d 2 z Car dt 2 dz Whl ) dt = F Spring F Shock m Car F Tire = k Tire *(z Whl ) + b Tire *( dz Car ) dt d 2 z Whl dt 2 = F Spring + F Shock F Tire m Car 16
17 Simscape Summary Enables physical modeling (acausal) of multi-domain physical systems Simscape platform Foundation libraries in 8 domains 17


18 Simscape Summary Enables physical modeling (acausal) of multi-domain physical systems Simscape platform Foundation libraries in 8 domains Language for defining custom blocks Extension of MATLAB Simulation engine and custom diagnostics 18
")



19 Simscape Summary Enables physical modeling (acausal) of multi-domain physical systems Simscape platform Foundation libraries in 8 domains Language for defining custom blocks Extension of MATLAB Simulation engine and custom diagnostics 19



20 Create Reusable System-Level Models Multidomain Fortran, C++ Simscape Domain Expertise Coding Effort Mechanical System Specification Hydraulic MATLAB, Simulink Domain Expertise Coding Effort System Model Electronic Power Systems Simscape Domain Exp. Coding Eff. Models are easier to understand, reuse, and share with others 20

21 Optimize Your Entire Engineering System Multidomain Simscape Multibody Domain Exp. Domain Exp. Coding Eff. Coding Eff. Plant Model Mechanical Driveline Domain Exp. Coding Eff. Hydraulic Fluids Domain Exp. Coding Eff. Electronic Electronics Domain Exp. Coding Eff. Power Systems Power Systems Domain Exp. Coding Eff. Simulate the entire system in a single environment Does not require learning multiple tools or co-simulation 21

22 Simscape Summary Enables physical modeling (acausal) of multi-domain physical systems Simscape platform Foundation libraries in 8 domains Language for defining custom blocks Extension of MATLAB Simulation engine and custom diagnostics Simscape libraries Extend foundation domains with components, effects, parameterizations Models can be converted to C code 22





23 To develop controller Simscape 23
24 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing Gear Mechanism Modeling Refine requirement and optimize mechanical design Analyze hydraulic actuator designs Test system in various situations 24
25 Landing Gear System Physical Model Main Actuator Lock Actuator Controller 25
26 Landing Gear Mechanism Modeling So, where do we really start? If possible, break down a big problem into smaller (i.e. more manageable) problems *** Use a divide and conquer approach *** 26

27 Landing Gear Mechanism Modeling So, where do we really start? Y q X r CM mg Understand the underlying mathematics/physics of the problem 27

28 Landing Gear Mechanism Modeling We need to extend the approach Y q 1 r 1 X r 2 1 q



29 Simscape Products 29

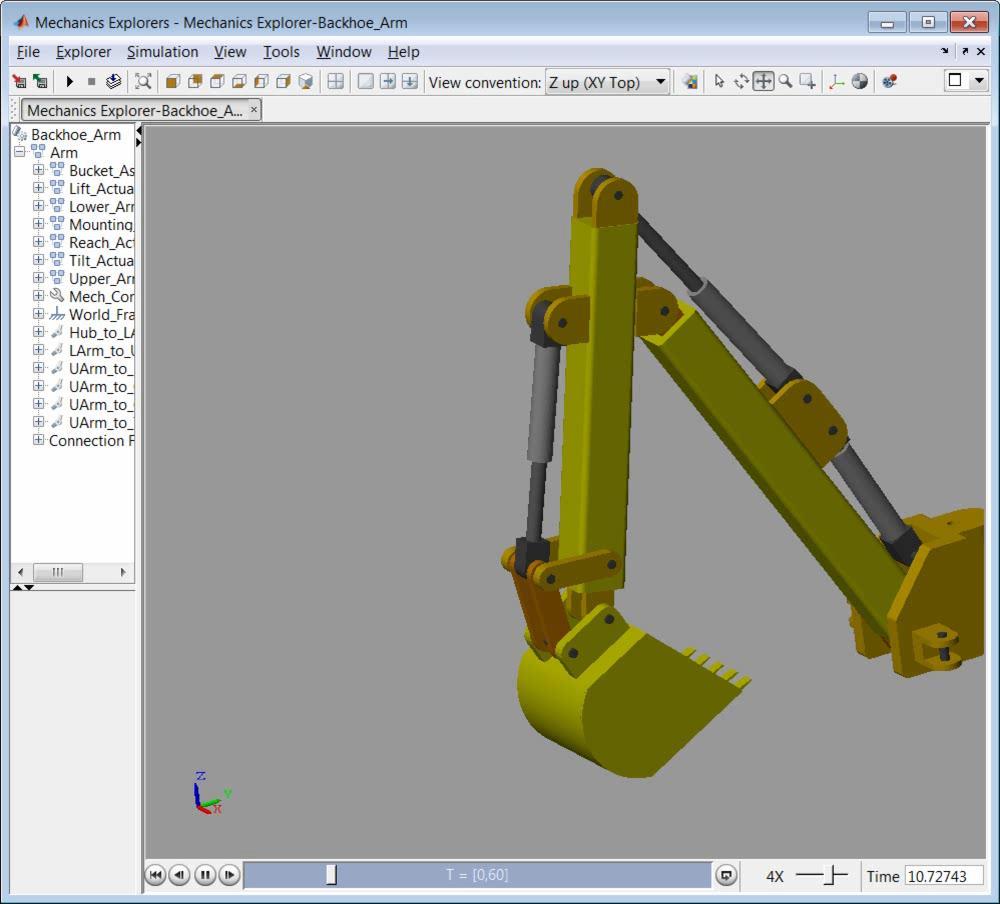
30 Landing Gear Mechanism Modeling Simscape Multibody to model the dynamics of 3D mechanisms GROUND Rotational Joint BODY1 Can manually create and combine any number of bodies and joints Rotational Joint BODY2 30


31 Landing Gear Mechanism Modeling Landing Gear CAD Import using Simscape Multibody Link Automatically create SimMechanics models from a CAD assembly Converts mass and inertia to rigid bodies Converts mate definitions to joints Creates STL files for use with SimMechanics visualization Directly connects SolidWorks, ProEngineer and Inventor CAD Simscape Multibody Link Export 31



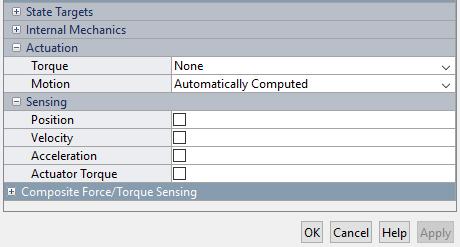
32 Landing Gear Mechanism Modeling Applying Actuation Force/Torque 32




33 Optimizing System in Mechanics Optimizing Lock Linkage Design Model: Feasible Test Point 1 Test Point 2... Test Point N Problem: Evaluate lock linkage connection points to find optimal location that meets requirements Solution: Parameterize Simscape Multibody model and automate tests using MATLAB Control Physical New Parameter Values Iterate faster Landing Gear Model Change Connection Point Simulate 33



34 Optimizing System in Mechanics Refine Lock Actuator Requirements Model: Small Medium? Large Problem: Determine size requirements for hydraulic actuator Solution: Use Simscape Multibody to determine hydraulic force and power required for prescribed motion 34



35 Reviewing Simulation Results Logging Simscape Variables All variables automatically logged to MATLAB Workspace Structure based on model hierarchy Values, time, units Only use sensors when signals are necessary Scopes Feedback signals Spend more time analyzing, less time simulating >> simlog.pipe_1.chamber.a.p.plot; 35



36 Reviewing Simulation Results Simscape Data Logging Log Simscape results to MATLAB workspace Log all or only selected blocks Variables, zero-crossing statistics Review results in Simscape Results Explorer Explore results in tree view Navigate between model and results Fewer blocks in model, efficient analysis >> sscexplore(simlog) 36


37 Simscape Logging Use local settings option added to selectively log simulation results Select results to log per block via right-click 37

38 Simscape Logging in Simulink Data Inspector Simscape results can be imported directly into Simulink Data Inspector Import simlog Can navigate from SDI to model 38



39 Zero-Crossing Statistics Log zero-crossing statistics for Simscape networks Shows when ZCs occur Can help indicate location of simulation bottlenecks 39
40 Sparkline Plots for Logged Data Quickly scan simulation results directly on model canvas 1. Click to show plots 2. Cursor shows values 3. Select variables 4. Direct link to plot variable in Simscape Results Explorer 40
41 Landing Gear System Hydraulic Actuator Model Hydraulic Actuator Controller 41



42 Modeling Hydraulic Actuation System Model: Problem: Model a hydraulic actuation system within the Simulink environment Solution: Use Simscape Fluids to model the hydraulic system 42
43 43
44 Modeling Hydraulic Actuation System Custom Four-Way Valve Model: Custom Valve A B P T Problem: Model a custom four-way directional valve within the Simulink environment Solution: Use Simscape Fluids to model the four-way directional valve 44


45 Hydraulic Actuator Modeling Spool Axial Hydraulic Forces Model: P B T Problem: Include the hydraulic axial forces on the spool to add more fidelity Solution: Use SimHydraulics to include the hydraulic forces on the spool 45


 Lock actuator")
46 Refine Main Actuator Requirements Model: Small Medium? Large Main Lock Problem: Determine main actuator and pump size requirements Solution: Use Simscape Fluids to model lock actuator and Simscape Multibody to determine main hydraulic force and power required for prescribed motion Main actuator (Prescribed Motion) Lock actuator (Hydraulic) 46
47 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing Gear Mechanism Modeling Refine requirement and optimize mechanical design Analyze hydraulic actuator designs Test system in various situations 47



48 Before system-level test with physical model, You need to integrate controller with physical model 1) Merging controller with physical model or 48
 Merge controller with physical model")
 Don t forget to set unit of a")
49 Before system-level test with physical model, You need to integrate controller with physical model 1) Merge controller with physical model or 2) Add to a point where sample time changes 3) Use to convert Simulink signal to Simscape signal 4) Don t forget to set unit of a converted signal 49


50 Design and Test Hydraulic Main and Lock Actuator System Model: Ref Control Requirements Problem: Design hydraulic main/ lock actuator and test it against requirements Solution: Use Simscape Fluids to model the hydraulic actuators and integrate with Simscape Multibody model of landing gear 50


51 Managing Design Variants Situation: Physical Systems Controller Alternatives Problem: Test different alternatives for physical systems and controllers in a single model Solution: Use Variants to model different configuration and manage it using Variants Manager 51

52 Managing Design Variants 1. Define variant configuration data 2. Create configurations Set control variables 4. Visualize, explore and set variant properties 5. Select the configuration 3 6. View diagnostics for selected configuration 6 52




53 Fast Restart Model: Bank Angle Bank Angle Problem: Minimize the simulation time on iterative tests to determine controller robustness to changes to airplane bank angle. Solution: Fast Restart & Run-Time Parameters 53

54 Fast Restart Run consecutive simulations more quickly Efficiently run multiple interactive simulations Saves simulation time eliminating recompilation between simulation runs Improves calibration workflows where the user is tuning block parameters between runs Programmatically run consecutive simulations more quickly Enable fast restart from command line using set_param Simulate a model in fast restart using sim and cvsim commands 54
55 55
56 Simscape Run-Time Parameters Change parameter values without recompiling the model Uses: Fast Restart in Simulink Model Reference HIL (SLRT or ERT target) Scope Nearly all Foundation Library parameters All Variable initial conditions Very few Simscape Add-on Product blocks No Simscape Multibody blocks 56

57 Too big, too difficult, one chance, Makes modeling easy Develop controller Find best design 57
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
System modeling using Simulink and Simscape
 System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape
 Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Vom Konzept zum Modell physikalischer Systeme Smarter Modellieren mit Simscape A B T P T + - 12V Up V- V+ Down Up Down M Maximilian Apfelbeck MathWorks München, 9.07.2014 2014 The MathWorks, Inc. 1 Key
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Modeling and Simulation of Electromechanical Systems
 Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Matlab Simulink Simscape
 Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt
 Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
Entwicklung mechatronischer Systeme in der Luft- und Raumfahrt Eva Pelster 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate
SimMechanics Getting Started Guide. R2013b
 SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
SimMechanics Getting Started Guide R2013b How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com
Model Library Mechanics
 Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Model Library Mechanics Using the libraries Mechanics 1D (Linear), Mechanics 1D (Rotary), Modal System incl. ANSYS interface, and MBS Mechanics (3D) incl. CAD import via STL and the additional options
Plant modeling: A First Step to Early Verification of Control Systems
 Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Plant modeling: A First Step to Early Verification of Control Systems Arkadiy Turevskiy, Technical Marketing Manager, The MathWorks Use simulation for early verification of your design before hardware
Quick Start Training Guide
 Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Quick Start Training Guide Table of Contents 1 INTRODUCTION TO MAPLESIM... 5 1.1 USER INTERFACE... 5 2 WORKING WITH A SAMPLE MODEL... 7 2.1 RUNNING A SIMULATION... 7 2.2 GRAPHICAL OUTPUT... 7 2.3 3D VISUALIZATION...
Modeling Mechanical, Electric, and Hydraulic Systems in Simulink
 Modeling Mechanical, Electric, and Hydraulic Systems in Simulink 2006 The MathWorks, Inc. Terry Denery, Ph.D. Physics-Based Modeling Tools Physics-Based Modeling Methods Improve Control System Design u
Modeling Mechanical, Electric, and Hydraulic Systems in Simulink 2006 The MathWorks, Inc. Terry Denery, Ph.D. Physics-Based Modeling Tools Physics-Based Modeling Methods Improve Control System Design u
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Development and Deployment of ECU based Control Systems through MBD. Imperative role of Model based design in System Engineering
 Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
Development and Deployment of ECU based Control Systems through MBD Imperative role of Model based design in System Engineering Outline Scope of Work Problem Definition Solution System Engineering Model
How Simscape Supports Innovation for Cyber-Physical Systems
 How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
How Simscape Supports Innovation for Cyber-Physical Systems Rick Hyde 2015 The MathWorks, Inc. 1 How can we use system-level modelling to support innovative product design? 2 Innovation in electric and
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Model-based Design/Simulation
 Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Fast development of controllers and sequence controllers The MATLAB program package and the associated toolbox, Simulink from Mathworks Inc. are considered to be the worldwide standard in the area of modeling
Using RecurDyn. Contents
 Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
Using RecurDyn Contents 1.0 Multibody Dynamics Overview... 2 2.0 Multibody Dynamics Applications... 3 3.0 What is RecurDyn and how is it different?... 4 4.0 Types of RecurDyn Analysis... 5 5.0 MBD Simulation
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR
 MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
MODELING AND DYNAMIC ANALYSIS OF 6-DOF PARALLEL MANIPULATOR N Narayan Rao 1, T Ashok 2, Anup Kumar Tammana 3 1 Assistant Professor, Department of Mechanical Engineering, VFSTRU, Guntur, India. nandurerao@gmail.com
Simulink as Your Enterprise Simulation Platform
 Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
Simulink as Your Enterprise Simulation Platform Stephan van Beek Manager, Applications Engineering Group 2015 The MathWorks, Inc. 1 Why simulation? 2 Hyperloop 3 TU Delft Wins Elon Musk Hyperloop Competition
What s New in MATLAB and Simulink
 What s New in MATLAB Simulink Selmane Sekkai - Cynthia Cudicini Application Engineering selmane.sekkai@mathworks.fr - cynthia.cudicini@mathworks.fr 1 Analysis Visualization Modeling Simulation Testing
What s New in MATLAB Simulink Selmane Sekkai - Cynthia Cudicini Application Engineering selmane.sekkai@mathworks.fr - cynthia.cudicini@mathworks.fr 1 Analysis Visualization Modeling Simulation Testing
SOLIDWORKS FOR MULTI-MATERIAL BUILDS BEST PRACTICES
 WHITE PAPER SOLIDWORKS FOR MULTI-MATERIAL BUILDS BEST PRACTICES AUTHOR COLE HARTMAN SOLIDWORKS FOR MULTI-MATERIAL BUILDS BEST PRACTICES INTRO Stratasys Connex multi-material 3D printing gives you the ability
WHITE PAPER SOLIDWORKS FOR MULTI-MATERIAL BUILDS BEST PRACTICES AUTHOR COLE HARTMAN SOLIDWORKS FOR MULTI-MATERIAL BUILDS BEST PRACTICES INTRO Stratasys Connex multi-material 3D printing gives you the ability
Real-Time Simulation of Simscape Models
 2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
2010 The MathWorks, Inc. Real-Time Simulation of Simscape Models Vehicle Dynamics Motor Planetary Gear Electric Motor Electric Generator DC-DC Converter Battery Controller Hybrid Electric Vehicle Wit ursilo
What's new in MATLAB and Simulink for Model-Based Design
 What's new in MATLAB and Simulink for Model-Based Design Magnus Jung Application Engineer 2016 The MathWorks, Inc. 1 What s New? 2 Model-Based Design Workflow RESEARCH REQUIREMENTS DESIGN Scheduling Event
What's new in MATLAB and Simulink for Model-Based Design Magnus Jung Application Engineer 2016 The MathWorks, Inc. 1 What s New? 2 Model-Based Design Workflow RESEARCH REQUIREMENTS DESIGN Scheduling Event
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
What s New in MATLAB and Simulink Young Joon Lee Principal Application Engineer
 What s New in MATLAB Simulink Young Joon Lee Principal Application Engineer 2016 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers
What s New in MATLAB Simulink Young Joon Lee Principal Application Engineer 2016 The MathWorks, Inc. 1 Engineers scientists 2 Engineers scientists Develop algorithms Analyze data write MATLAB code. 3 Engineers
Mathematical Modelling Using SimScape (Mechanical Systems)
") Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Developing a Robot Model using System-Level Design
 Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering
 LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
LMS Virtual.Lab The Unified Environment for Functional Performance Engineering LMS Imagine.Lab LMS OPTIMUS LMS Engineering and Deployment Services Technology Transfer Process Transformation & Best Practices
Simscape User s Guide. R2014a
 Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Simscape User s Guide R2014a How to Contact MathWorks www.mathworks.com Web comp.soft-sys.matlab Newsgroup www.mathworks.com/contact_ts.html Technical Support suggest@mathworks.com bugs@mathworks.com doc@mathworks.com
Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation
 Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics
Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics
What s New In Simulink: Fraser Macmillen
 What s New In Simulink: Fraser Macmillen 2015 The MathWorks, Inc. 1 Agenda Interacting with models Handling model (design) data New modelling constructs & editing features Simulink Test 2 How can you easily
What s New In Simulink: Fraser Macmillen 2015 The MathWorks, Inc. 1 Agenda Interacting with models Handling model (design) data New modelling constructs & editing features Simulink Test 2 How can you easily
There is no need to submit any report and you just need to finish the three tutorials as well as the example.
 The first three tutorials are selected from the MATLAB/Simulink help. The fourth example is a simple SimMechanics example which can help you learn the SimMechanics more. You can find more detailed information
The first three tutorials are selected from the MATLAB/Simulink help. The fourth example is a simple SimMechanics example which can help you learn the SimMechanics more. You can find more detailed information
MapleSim User's Guide
 MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
MapleSim User's Guide Copyright Maplesoft, a division of Waterloo Maple Inc. 2001-2009 MapleSim User's Guide Copyright Maplesoft, MapleSim, and Maple are all trademarks of Waterloo Maple Inc. Maplesoft,
What s New in MATLAB and Simulink Prashant Rao Technical Manager MathWorks India
 What s New in MATLAB and Simulink Prashant Rao Technical Manager MathWorks India 2013 The MathWorks, Inc. 1 MathWorks Product Overview 2 Core MathWorks Products The leading environment for technical computing
What s New in MATLAB and Simulink Prashant Rao Technical Manager MathWorks India 2013 The MathWorks, Inc. 1 MathWorks Product Overview 2 Core MathWorks Products The leading environment for technical computing
USE OF ADAMS IN DYNAMIC SIMULATION OF LANDING GEAR RETRACTION AND EXTENSION
 USE OF ADAMS IN DYNAMIC SIMULATION OF LANDING GEAR RETRACTION AND EXTENSION Author : O. NOEL Messier-Dowty SA (Velizy, France) 1. ABSTRACT This paper presents the method in use at Messier-Dowty SA during
USE OF ADAMS IN DYNAMIC SIMULATION OF LANDING GEAR RETRACTION AND EXTENSION Author : O. NOEL Messier-Dowty SA (Velizy, France) 1. ABSTRACT This paper presents the method in use at Messier-Dowty SA during
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel
 Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
SimWise 4D. Integrated Motion and Stress Analysis
 SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
SimWise 4D Integrated Motion and Stress Analysis SimWise 4D Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional performance of mechanical parts and
Lesson 1: Introduction to Pro/MECHANICA Motion
 Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
Lesson 1: Introduction to Pro/MECHANICA Motion 1.1 Overview of the Lesson The purpose of this lesson is to provide you with a brief overview of Pro/MECHANICA Motion, also called Motion in this book. Motion
M-Target for Simulink. For perfect simulation and model based design.
 M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
M-Target for Simulink For perfect simulation and model based design. PARTNERSHIP Bachmann electronic is a product partner of Mathworks within the Connections Program. This is based on the certified qualifications
Design and Verification of Motion Control Algorithms Using Simulation
 Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
Design and Verification of Motion Control Algorithms Using Simulation Douglas Eastman, Paul Lambrechts, Arkadiy Turevskiy The MathWorks, Inc. Natick, MA, 176 Identifying system level problems early and
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS
 A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
A MECHATRONIC APPROACH OF THE WINDSHIELD WIPER MECHANISMS Alexandru Cătălin Transilvania University of Braşov calex@unitbv.ro Keywords: windshield wiper mechanism, dynamic simulation, control system, virtual
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics
 Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project Presentation 10:10-13:00, 12/21 and 12/28 1. The window shield wiper (2) For the window wiper in Fig.1.33 on p.26 of the PPT, (1). Select the length of all
Mechanism Kinematics and Dynamics Final Project Presentation 10:10-13:00, 12/21 and 12/28 1. The window shield wiper (2) For the window wiper in Fig.1.33 on p.26 of the PPT, (1). Select the length of all
다중센서기반자율시스템의모델설계및개발 이제훈차장 The MathWorks, Inc. 2
 1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
1 다중센서기반자율시스템의모델설계및개발 이제훈차장 2017 The MathWorks, Inc. 2 What we will see today 3 Functional Segmentation of Autonomous System Aircraft/ Platform Sense Perceive Plan & Decide Control Connect/ Communicate
System Requirements & Platform Availability by Product for R2016b
 & Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
& Platform Availability by Product for R2016b View general system requirements. Product Aerospace Blockset Requires Aerospace Control recommended Aerospace Antenna RF recommended Phased Array recommended
Collaboration in Teams: Simulink Projects Demonstration
 Collaboration in Teams: Simulink Projects Demonstration 김종헌차장 Senior Application Engineer MathWorks Korea 2011 The MathWorks, Inc. 1 Agenda Motivation 7 common technical challenges Next steps Q & A allen.kim@mathworks.com
Collaboration in Teams: Simulink Projects Demonstration 김종헌차장 Senior Application Engineer MathWorks Korea 2011 The MathWorks, Inc. 1 Agenda Motivation 7 common technical challenges Next steps Q & A allen.kim@mathworks.com
Week 12 - Lecture Mechanical Event Simulation. ME Introduction to CAD/CAE Tools
 Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Week 12 - Lecture Mechanical Event Simulation Lecture Topics Mechanical Event Simulation Overview Additional Element Types Joint Component Description General Constraint Refresh Mesh Control Force Estimation
Vehicle Dynamics & Safety: Multibody System. Simulation tools based on MultiBody approach are widespread in vehicle design and testing
 Vehicle Dynamics & Safety: Multibody System Simulation tools based on MultiBody approach are widespread in vehicle design and testing Vehicle Dynamics & Safety: Multibody System What is a Multibody System?
Vehicle Dynamics & Safety: Multibody System Simulation tools based on MultiBody approach are widespread in vehicle design and testing Vehicle Dynamics & Safety: Multibody System What is a Multibody System?
WEC-Sim Training Course
 1 Program Name or Ancillary Text eere.energy.gov FOSWEC wave tank testing and WEC-Sim simulation WEC-Sim Training Course for users and developers August 17, 2017 Yi-Hsiang Yu (NREL) Kelley Ruehl (Sandia)
1 Program Name or Ancillary Text eere.energy.gov FOSWEC wave tank testing and WEC-Sim simulation WEC-Sim Training Course for users and developers August 17, 2017 Yi-Hsiang Yu (NREL) Kelley Ruehl (Sandia)
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
Mathieu Dutré - Application Specialist MBSE. Analysis and optimization of physical models for HIL simulation
 Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Mathieu Dutré - Application Specialist MBSE Analysis and optimization of physical models for HIL simulation Smarter decisions, better products. Industry drivers for HIL simulation Model Driven Virtual
Mechanical System and SimMechanics Simulation
 American Journal of Mechanical Engineering, 3, Vol., No. 7, 555 Available online at http://pubs.sciepub.com/ajme//7/ Science and Education Publishing DOI:.69/ajme--7 Mechanical System and SimMechanics
American Journal of Mechanical Engineering, 3, Vol., No. 7, 555 Available online at http://pubs.sciepub.com/ajme//7/ Science and Education Publishing DOI:.69/ajme--7 Mechanical System and SimMechanics
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2012 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 November 2012 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.:
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2011 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2011 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
SolidWorks Assembly Files. Assemblies Mobility. The Mating Game Mating features. Mechanical Mates Relative rotation about axes
 Assemblies Mobility SolidWorks Assembly Files An assembly file is a collection of parts The first part brought into an assembly file is fixed Other parts are constrained relative to that part (or other
Assemblies Mobility SolidWorks Assembly Files An assembly file is a collection of parts The first part brought into an assembly file is fixed Other parts are constrained relative to that part (or other
Recent developments in simulation, optimization and control of flexible multibody systems
 Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Recent developments in simulation, optimization and control of flexible multibody systems Olivier Brüls Department of Aerospace and Mechanical Engineering University of Liège o.bruls@ulg.ac.be Katholieke
Plant Modeling for Powertrain Control Design
 Plant Modeling for Powertrain Control Design Modelica Automotive Workshop Dearborn, MI November 19, 2002 Dr. Larry Michaels GM Powertrain Controls Engineering Challenges in PT Control Design Control System
Plant Modeling for Powertrain Control Design Modelica Automotive Workshop Dearborn, MI November 19, 2002 Dr. Larry Michaels GM Powertrain Controls Engineering Challenges in PT Control Design Control System
Pick and Place Robot Simulation
 Pick and Place Robot Simulation James Beukers Jordan Jacobson ECE 63 Fall 4 December 6, 4 Contents Introduction System Overview 3 3 State Space Model 3 4 Controller Design 6 5 Simulation and Results 7
Pick and Place Robot Simulation James Beukers Jordan Jacobson ECE 63 Fall 4 December 6, 4 Contents Introduction System Overview 3 3 State Space Model 3 4 Controller Design 6 5 Simulation and Results 7
Paul Goossens Product Director
 Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
Paul Goossens Product Director June 2009 Maplesoft, a division of Waterloo Maple Inc., 2009 Maplesoft and Maple are trademarks of Waterloo Maple Inc. 2009 Maplesoft, a a division of of Waterloo Maple Inc.
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 What s New in Release 2015a and 2014b Young Joon Lee Principal Application Engineer 2015 The MathWorks, Inc. 2 Agenda New Features Graphics and Data Design Performance Design
2015 The MathWorks, Inc. 1 What s New in Release 2015a and 2014b Young Joon Lee Principal Application Engineer 2015 The MathWorks, Inc. 2 Agenda New Features Graphics and Data Design Performance Design
Functional Testing of Solid Edge Designs
 Scott Ziemba, Director of Customer Service, Design Simulation Technologies Functional Testing of Solid Edge Designs Solid Edge University 2014 May 12-14, Atlanta, GA, USA 4 SOLID EDGE UNIVERSITY 2014 #SEU14
Scott Ziemba, Director of Customer Service, Design Simulation Technologies Functional Testing of Solid Edge Designs Solid Edge University 2014 May 12-14, Atlanta, GA, USA 4 SOLID EDGE UNIVERSITY 2014 #SEU14
Speeding up Simulink. Murali Yeddanapudi The MathWorks, Inc. 1
 Speeding up Simulink Murali Yeddanapudi 2017 The MathWorks, Inc. 1 Agenda Typical use cases Accelerator mode Performance Advisor Fast Restart and parsim Incremental workflows Solver Profiler 2 Agenda Typical
Speeding up Simulink Murali Yeddanapudi 2017 The MathWorks, Inc. 1 Agenda Typical use cases Accelerator mode Performance Advisor Fast Restart and parsim Incremental workflows Solver Profiler 2 Agenda Typical
COSMOS. Vehicle Suspension Analysis ---- SolidWorks Corporation. Introduction 1. Role of vehicle suspension 2. Motion analysis 2
 ---- WHITE PAPER Vehicle Suspension Analysis CONTENTS Introduction 1 Role of vehicle suspension 2 Motion analysis 2 Motion analysis using COSMOSMotion 3 Real-life example 4-5 Exporting loads to COSMOSWorks
---- WHITE PAPER Vehicle Suspension Analysis CONTENTS Introduction 1 Role of vehicle suspension 2 Motion analysis 2 Motion analysis using COSMOSMotion 3 Real-life example 4-5 Exporting loads to COSMOSWorks
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method
 Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
2015 The MathWorks, Inc. 1
 2015 The MathWorks, Inc. 1 [Track 3] 물리모델시뮬레이션을 활용한고장예측 김종헌부장 2015 The MathWorks, Inc. 2 ฉ นต องการความช วยเหล อ. Segítségre van szükségem. Necesito ayuda. انا بحاجة الى مساعدة. Мне нужна помощь. Ich brauche
2015 The MathWorks, Inc. 1 [Track 3] 물리모델시뮬레이션을 활용한고장예측 김종헌부장 2015 The MathWorks, Inc. 2 ฉ นต องการความช วยเหล อ. Segítségre van szükségem. Necesito ayuda. انا بحاجة الى مساعدة. Мне нужна помощь. Ich brauche
Example: Modeling a Cruise Control System in Simulink
 Example: Modeling a Cruise Control System in Simulink Physical setup and system equations Building the model Open-loop response Extracting the Model Implementing PI control Closed-loop response Physical
Example: Modeling a Cruise Control System in Simulink Physical setup and system equations Building the model Open-loop response Extracting the Model Implementing PI control Closed-loop response Physical
SIMULINK Tutorial. Select File-New-Model from the menu bar of this window. The following window should now appear.
 SIMULINK Tutorial Simulink is a block-orientated program that allows the simulation of dynamic systems in a block diagram format whether they are linear or nonlinear, in continuous or discrete forms. To
SIMULINK Tutorial Simulink is a block-orientated program that allows the simulation of dynamic systems in a block diagram format whether they are linear or nonlinear, in continuous or discrete forms. To
Animation. Computer Graphics COMP 770 (236) Spring Instructor: Brandon Lloyd 4/23/07 1
 Spring Instructor: Brandon Lloyd 4/23/07 1") Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
Animation Computer Graphics COMP 770 (236) Spring 2007 Instructor: Brandon Lloyd 4/23/07 1 Today s Topics Interpolation Forward and inverse kinematics Rigid body simulation Fluids Particle systems Behavioral
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 October 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
SimWise. 3D Dynamic Motion, and Stress Analysis. integrated with Alibre Design
 SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
SimWise 3D Dynamic Motion, and Stress Analysis integrated with Alibre Design SimWise 4D for Alibre Integrated Motion Simulation and Stress Analysis SimWise 4D is a software tool that allows the functional
Welcome to MSC.visualNastran 4D. 1.0 Installing MSC.visualNastran 4D
 Welcome to MSC.visualNastran 4D MSC.visualNastran 4D is the result of a twelve-year collaborative effort between professional engineers and software specialists. We are committed to providing you easy-to-use,
Welcome to MSC.visualNastran 4D MSC.visualNastran 4D is the result of a twelve-year collaborative effort between professional engineers and software specialists. We are committed to providing you easy-to-use,
Bet & MathWorks By Bet Herrera Sucarrat Application Engineer MathWorks
 Bet & MathWorks By Bet Herrera Sucarrat Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Researchers Test Control Algorithms for NASA SPHERES Satellites with a MATLAB Based Simulator Challenge
Bet & MathWorks By Bet Herrera Sucarrat Application Engineer MathWorks 2015 The MathWorks, Inc. 1 Researchers Test Control Algorithms for NASA SPHERES Satellites with a MATLAB Based Simulator Challenge
VIRTUAL PROTOTYPING SIMULATION FOR THE DESIGN OF TWO-WHEELED VEHICLES
 NTERNATIONAL DESIGN CONFERENCE - DESIGN 2002 Dubrovnik, May 14-17, 2002. VIRTUAL PROTOTYPING SIMULATION FOR THE DESIGN OF TWO-WHEELED VEHICLES S. Barone, A. Curcio and F. Pierucci Keywords: CAD, Multi-Body
NTERNATIONAL DESIGN CONFERENCE - DESIGN 2002 Dubrovnik, May 14-17, 2002. VIRTUAL PROTOTYPING SIMULATION FOR THE DESIGN OF TWO-WHEELED VEHICLES S. Barone, A. Curcio and F. Pierucci Keywords: CAD, Multi-Body
What s New in Simulink in R2015b and R2016a
 What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
What s New in Simulink in R2015b and R2016a Ruth-Anne Marchant Application Engineer 2016 The MathWorks, Inc. 1 2 Summary of Major New Capabilities for Model-Based Design RESEARCH REQUIREMENTS DESIGN Modelling
Multi-Domain Modeling and Simulation of an Electro-Hydraulic Implement System
 06CV-145 Multi-Domain Modeling and Simulation of an Electro-Hydraulic Implement System Sameer M. Prabhu, Jeff Wendlandt, John Glass, and Tom Egel The MathWorks, Inc. ABSTRACT The need to meet new regulatory
06CV-145 Multi-Domain Modeling and Simulation of an Electro-Hydraulic Implement System Sameer M. Prabhu, Jeff Wendlandt, John Glass, and Tom Egel The MathWorks, Inc. ABSTRACT The need to meet new regulatory
What s New in MATLAB May 16, 2017
 What s New in MATLAB May 16, 2017 2017 The MathWorks, Inc. 1 Agenda MATLAB Foundation Working with Data Building & Sharing MATLAB Applications Application Specific Enhancements Summary and Wrap-up 2 Agenda
What s New in MATLAB May 16, 2017 2017 The MathWorks, Inc. 1 Agenda MATLAB Foundation Working with Data Building & Sharing MATLAB Applications Application Specific Enhancements Summary and Wrap-up 2 Agenda
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2017 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
2. Motion Analysis - Sim-Mechanics
 2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
2 Motion Analysis - Sim-Mechanics Figure 1 - The RR manipulator frames The following table tabulates the summary of different types of analysis that is performed for the RR manipulator introduced in the
SIMPACK Code Export. Customer Application Examples. The Basis for Mechatronic Simulation
 Customer Application Examples 1 SIMPACK Code Export The Basis for Mechatronic Simulation Contents Customer Application Examples 2 Functionality Fields of Application What s new since last User Meeting
Customer Application Examples 1 SIMPACK Code Export The Basis for Mechatronic Simulation Contents Customer Application Examples 2 Functionality Fields of Application What s new since last User Meeting
Attach to this tutorial, there are some drawings to create the CAD models with Solid Works.
 Modeling and Simulation Tutorial 1. (Slider Mechanism) Objective: To Create Slider Mechanism Elements to Use: SolidWorks Cosmos Motion Dynamics Books Description: This tutorial explains how to set up different
Modeling and Simulation Tutorial 1. (Slider Mechanism) Objective: To Create Slider Mechanism Elements to Use: SolidWorks Cosmos Motion Dynamics Books Description: This tutorial explains how to set up different
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
ConfigurationDesk/RTI. Compatibility with Toolboxes and Blocksets Provided by MathWorks
 ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2016 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
ConfigurationDesk/RTI Compatibility with Toolboxes and Blocksets Provided by MathWorks Version 1.0 April 2016 How to Contact dspace Mail: dspace GmbH Rathenaustraße 26 33102 Paderborn Germany Tel.: ++49
From Design to Production
 From Design to Production An integrated approach Paolo Fabbri Senior Engineer 2014 The MathWorks, Inc. 1 Do you know what it is? Requirements System Test Functional Spec Integration Test Detailed Design
From Design to Production An integrated approach Paolo Fabbri Senior Engineer 2014 The MathWorks, Inc. 1 Do you know what it is? Requirements System Test Functional Spec Integration Test Detailed Design
Team-Based Collaboration in Simulink
 Team-Based Collaboration in Simulink Sonia Bridge 2015 The MathWorks, Inc. 1 Create tools that make it easy for teams to manage the full lifecycle of their Model-Based Design projects Collaborate Integrate
Team-Based Collaboration in Simulink Sonia Bridge 2015 The MathWorks, Inc. 1 Create tools that make it easy for teams to manage the full lifecycle of their Model-Based Design projects Collaborate Integrate
Model for Sucker-Rod Pumping Unit Operating Modes Analysis Based on SimMechanics Library
 Journal of Physics: Conference Series PAPER OPEN ACCESS Model for Sucker-Rod Pumping Unit Operating Modes Analysis Based on SimMechanics Library To cite this article: A M Zyuzev and M V Bubnov 2018 J.
Journal of Physics: Conference Series PAPER OPEN ACCESS Model for Sucker-Rod Pumping Unit Operating Modes Analysis Based on SimMechanics Library To cite this article: A M Zyuzev and M V Bubnov 2018 J.
Model Based Systems Engineering Engine Control: from concept to validation. Jan Smolders Technical Account Manager
 Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Model Based Systems Engineering Engine Control: from concept to validation Jan Smolders Technical Account Manager Table of Content Model Driven Development MiL SiL HiL Model adaptation to Real-Time Towards
Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL
 Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL Dheeraj Pandey AM CAE International Tractors Limited Jalandhar Road, Hoshiarpur 146001 - India dheerajpandey@sonalika.com
Virtual Testing Methodology for TPL Lifting Capacity of Agricultural Tractor TPL Dheeraj Pandey AM CAE International Tractors Limited Jalandhar Road, Hoshiarpur 146001 - India dheerajpandey@sonalika.com
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA
 Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA Daniel Baumgartner, Andreas Pfeiffer German Aerospace Center (DLR), Institute of System Dynamics and Control 82234 Wessling,
Automated Modelica Package Generation of Parameterized Multibody Systems in CATIA Daniel Baumgartner, Andreas Pfeiffer German Aerospace Center (DLR), Institute of System Dynamics and Control 82234 Wessling,
MathWorks Products and Prices International September 2016
 MATLAB Product Family page 1 of 5 MATLAB 1 2,650 10,600 Parallel Computing Toolbox 1,250 5,000 Math and Optimization Symbolic Math Toolbox 1,250 5,000 Partial Differential Equation Toolbox 1,250 5,000
MATLAB Product Family page 1 of 5 MATLAB 1 2,650 10,600 Parallel Computing Toolbox 1,250 5,000 Math and Optimization Symbolic Math Toolbox 1,250 5,000 Partial Differential Equation Toolbox 1,250 5,000
Interfacing OpenSim models with MATLAB /Simulink. OpenSim Workshop
 Interfacing OpenSim models with MATLAB /Simulink Acknowledgements Why do we care about MATLAB and OpenSim? MATLAB Simulink S- func5on OpenSim Pros World s leading mathematical computing software Used by
Interfacing OpenSim models with MATLAB /Simulink Acknowledgements Why do we care about MATLAB and OpenSim? MATLAB Simulink S- func5on OpenSim Pros World s leading mathematical computing software Used by