What is Mechatronics
|
|
|
- Roger Richardson
- 6 years ago
- Views:
Transcription
1 Mechatronics
2 What is Mechatronics
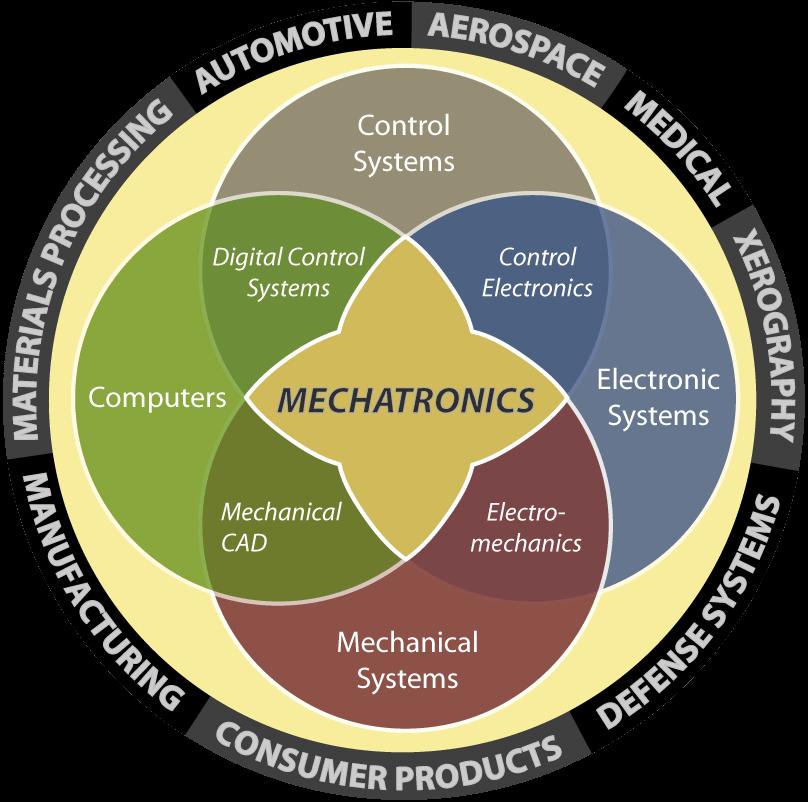
3 What Is Mechatronics? Mechatronics is a methodology used for the optimal design of electromechanical products. Multi-disciplinary system design has employed a sequential design-by-discipline. The mechatronic design methodology is based on concurrent, instead of sequentialapproach to discipline design, resulting in products with more synergy approach.
4 Mechatronics Constituents
5 Mechatronics Key Elements
6 Automation/Mechatronics Subjects
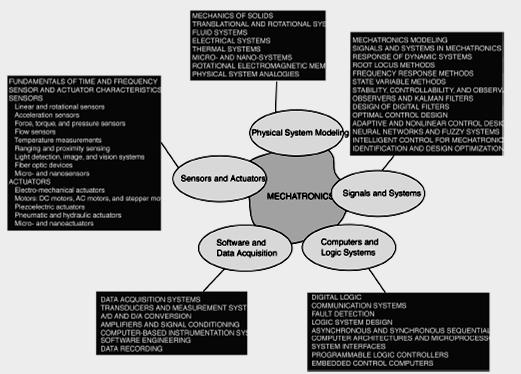
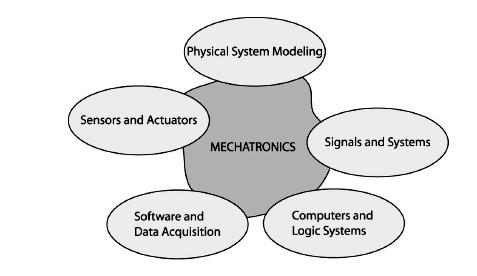
7 Mechatronic s Key Elements
8 Mechatronics Key Elements 1-Information Systems a- Modeling and Simulation - Modeling is the process of representing the behavior of a real system by a collection of mathematical equations and logic. - Simulation is the process of solving the model and it is performed on a computer. The process of simulation can be divided into three sections: initialization, iteration, and termination
9 b- Automatic Controls _ Mechatronics appears to be nothing more than control system engineering. What is the difference? The difference is the sequence of design steps
10 c-optimization Optimization solves the problem of distributing limited resources throughout a system such that pre specified aspects of its behavior are satisfied. It is applied to:. Establish the optimal system configuration. Identification of optimal trajectories. Control system design. Identification of model parameters
11 2- Electrical Systems The following electrical components are frequently used: - Motors and generators - Transducers - Solid state devices including computers - Circuits (signal conditioning, impedance matching, amplifiers ) -Contact devices (relays, circuit breakers, switches )
12 3- Sensors Sensors are required to monitor the performance of machines and processes. Some of the more common measurement variables in mechatronics systems are temperature, speed, position, force, torque, and acceleration. The characteristics that are important when one is measuring these variables include the dynamics of the sensor, stability, resolution, precision, robustness, size, - and signal processing. The need for less expensive and precise sensors, as well as integration of the sensor and signal processing on a common carrier or on one chip, has become important.
13 4- Actuators Actuation involves a physical acting on the process, such as the ejection of a workpiece from a conveyor system ini tiated by a sensor. Actuators are usually electrical, mechanical, fluid power or pneumatic based. They transform electrical inputs into mechanical outputs such as force, angle, and position. Actuators can be classified into three general groups. - Electromagnetic actuators, (e.g., AC and DC electrical motors, stepper motors, electromagnets) - Fluid power actuators, (e.g., hydraulics, pneumatics) - Unconventional actuators (e.g., piezoelectric, magnetostrictive, memory metal) There are also special actuators for high-precision applications that require fast responses, They are often applied to controls that compensate for friction, nonlinearities, and limiting parameters.
14 5- Computer Systems - Computer system hardware is usually restricted to computer-specific circuits and devices. These include logic networks, flip flops, counters, timers, triggers, integrated circuits, and microprocessors. - Fast computer hardware is of little value without the appropriate software -Assembly language was the first step toward a higher- Ievel language -For more powerful (higher-level) programming languages to be used, compilers were developed. Some of the most well-known high-level languages are BASIC, FORTRAN, C, and Pascal. -Visual languages, including Matrixx, EasyS, SimuLink, VisSim, and LabView.
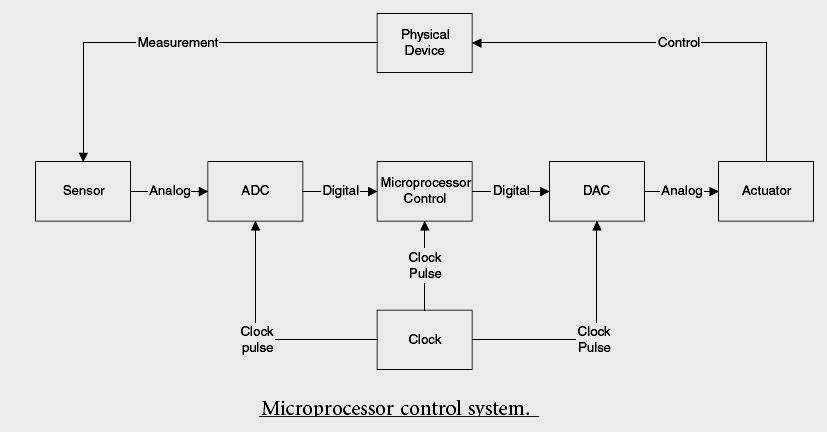
15 6- Real-Time Interfacing It is process of fusing and synchronizing model, sensor, and actuator information is called realtime interfacing or hardware-in-the-loop simulation. For mechatronics applications real-time interfacing includes analog to digital (A/D) and digital to analog (D/ A) conversion, analog signal conditioning circuits, and sampling theory. The main purpose of the real-time interface system is to provide data acquisition and control function for the computer.
16 Signals transmitted through the A/D and D/ A devices fall into three categories:. Analog. Digital. Frequency

17 Machine cell with robot Machine cell with robot 13. control valve- pneumatic gripper 14. Tactile sensor- gripper force 15. Servo amplifier- robot arm 16. Control computer- robot control 17. Display- robot status 18. Camera- part identification, guidance

18 CNC Machine

19 Aircraft Maneuvers

20 Ship Autopilot
21
22
23
24
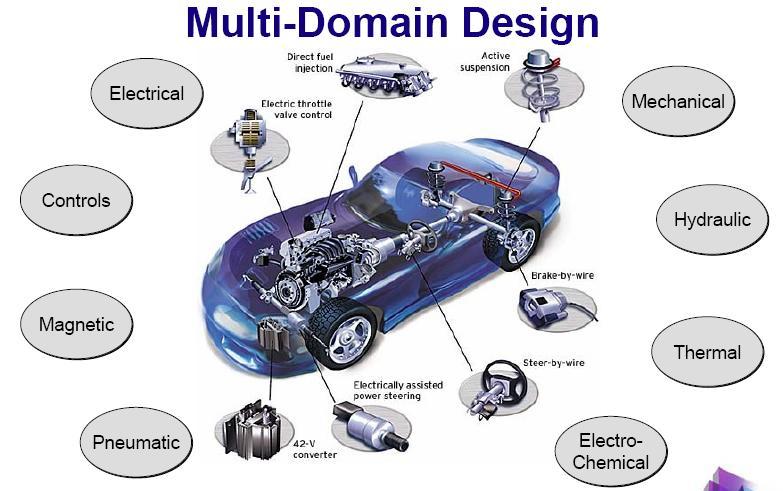
25 The Automobile as a Mechatronic System Ignition timing Fuel-air ratio Lubrication system ABS Traction control Suspension system Steering IVHS (Intelligent Vehicle Highway System)



26 Using a radar to measure distance and velocity to autonomously maintain desired distance between vehicles. Autonomous vehicle system design with sensors and actuators.
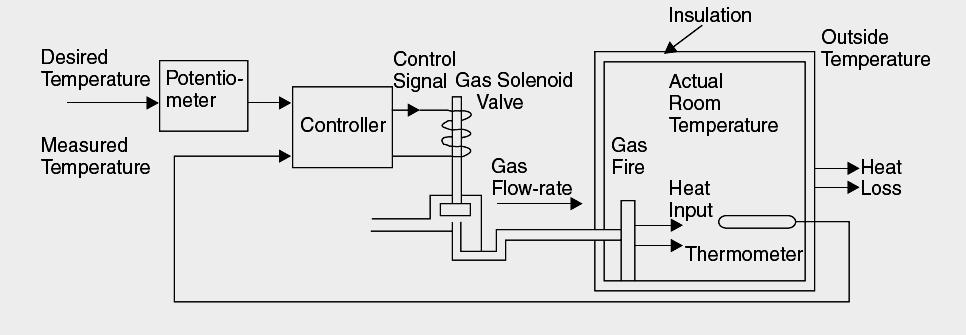
27 Temperature Control
28
29
30
31
32


33 Mobile Actuator-Sensor Network Tasks (MAS-net) Efficiently deploy a group of mobile sensors to characterize the dynamically evolving diffusion boundary Using the same mobility platform, mobile actuators can actively control the formation of the diffusion boundary to a desired zone/shape


34 MASNET Experimental Platform (Conceptual Block Diagram)

")
 through system Vision system for")
 take plume samples Air")
35 Base station makes plume prediction and computes sensor locations Wireless communication system broadcasts commands to actuated sensors Fog Contaminant (orange) introduced into air stream Fan blows air (green) through system Vision system for locating sensors Actuated sensors (mote-based robots) take plume samples Air outlet 2-D System Testbed Concept


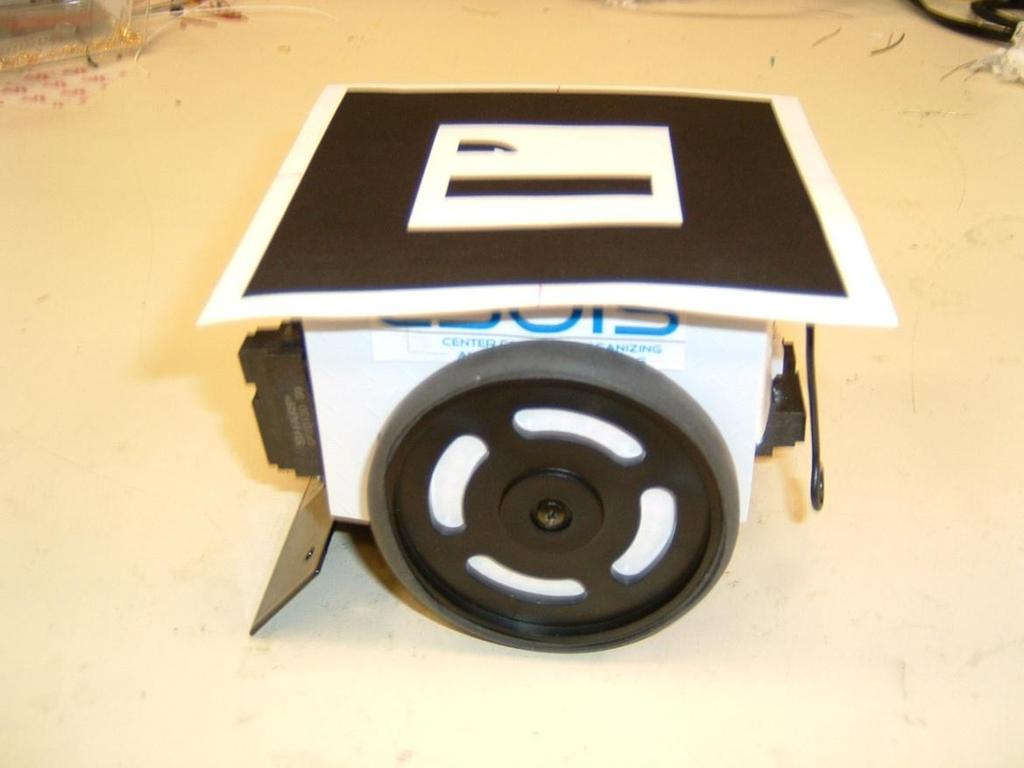

36 A Closer Look!!! Tag on top With Cover

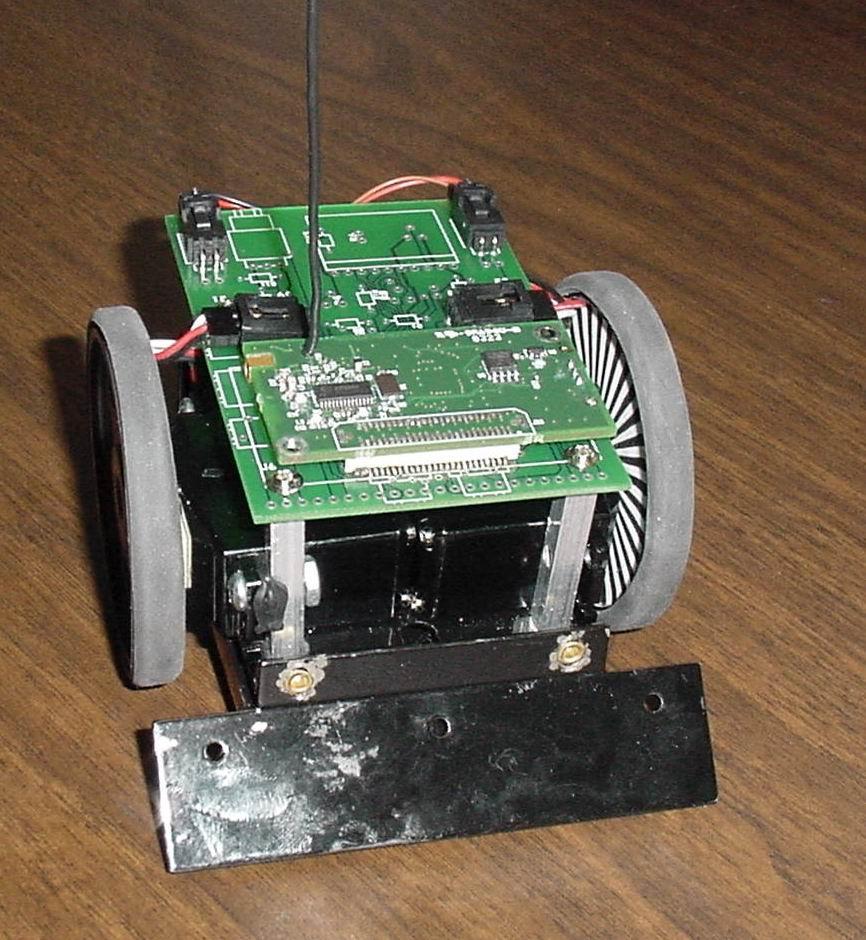

37 1st Prototype Photos Mote-based Robot: USU MASmote
 Robots")
38 The Test Bed: Motes Camera GUI Serial Cable Parallel Cable Programming Board Wireless Communication Camera Driver Mote (MICA Board) Robots TinyOS

 3 IR")

 CC1000 (Comm.")
39 Hardware Configuration of the Mobility Platform Sensors 2 Encoders 2ADC Control Board (USU) 3 IR (Sharp GP2D12) 2 Photo- Resistors 3 ADC 2 ADC MICA2 (Berkeley) AVR Atmega 128 (CPU) CC1000 (Comm.) 2 PWM 2 Servos 6V Power 3V Power


40 Software on Mobile Mote TinyOS Stack/Xnp (Comm.) Other Utilities of TinyOS User Applications Low Level Lib TinyDB TinySchema 2 Servos 2 Encoders Other Sensors/Actuators


41 Other Mechatronics Examples Washing Machine Thermostat Camera Fuel Injection
42 Fault Detection







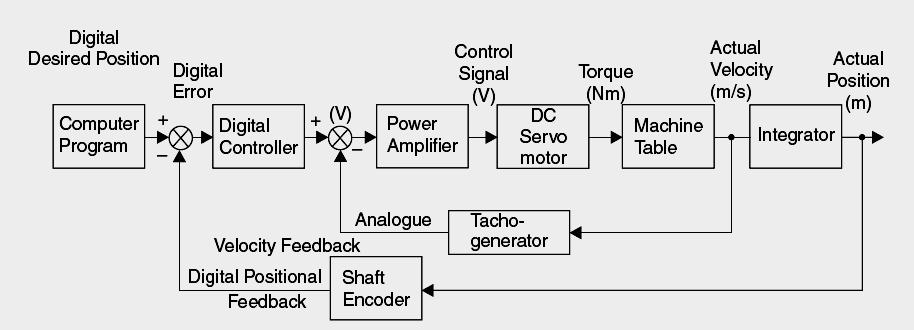
43 Control System Generalised Block Diagram Reference Input Error Signal Control Effort Command and Triggering Power Input Actual Value System Controller Signal Isolation And Conditioning Buffering Feedback And Power Electronics Sensors Input Power Process Output Signal Digital Controller Analogue Part of System
44
45
46
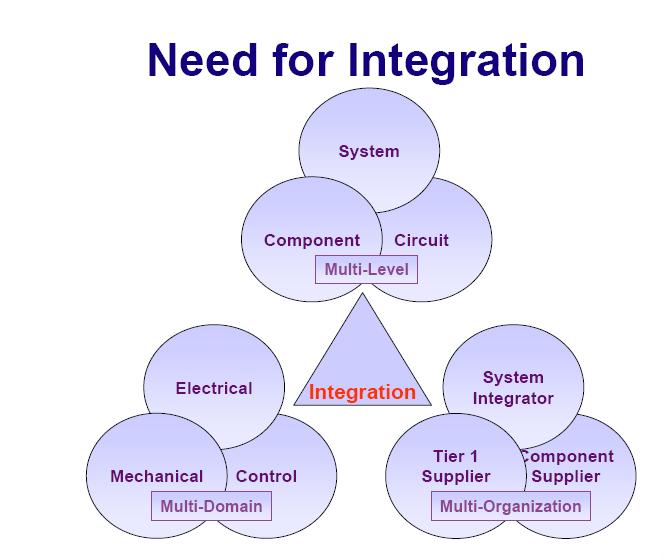
47 Integrated Design Issues in Mechatronics

48 Ways of integration within mechatronics systems.
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N
 Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Mechatronic Design Approach D R. T A R E K A. T U T U N J I P H I L A D E L P H I A U N I V E R S I T Y, J O R D A N 2 0 1 3 Mechatronics: Synergetic Integration of Different Disciplines [Ref.] Prof. Rolf
Introduction to Control Systems Design
 Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
Experiment One Introduction to Control Systems Design Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1.1 Control System Design The design of control systems
MECHATRONICS. William Bolton. Sixth Edition ELECTRONIC CONTROL SYSTEMS ENGINEERING IN MECHANICAL AND ELECTRICAL PEARSON
 MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
MECHATRONICS ELECTRONIC CONTROL SYSTEMS IN MECHANICAL AND ELECTRICAL ENGINEERING Sixth Edition William Bolton PEARSON Harlow, England London New York Boston San Francisco Toronto Sydney Auckland Singapore
 VALLIAMMAI ENGINERING COLLEGE DEPARTMENT OF MECHANICAL ENGINEERING SUBJECT CODE / NAME: ME6702 / MECHATRONICS YEAR/SEM: IV /VII UNIT 1: INTRODUCTION 1. List out the types of systems. BT-1 2. Describe the
VALLIAMMAI ENGINERING COLLEGE DEPARTMENT OF MECHANICAL ENGINEERING SUBJECT CODE / NAME: ME6702 / MECHATRONICS YEAR/SEM: IV /VII UNIT 1: INTRODUCTION 1. List out the types of systems. BT-1 2. Describe the
GOPALAN COLLEGE OF ENGINEERING AND MANAGEMENT Department of Mechanical Engineering COURSE PLAN
 Appendix - C GOPALAN COLLEGE OF ENGINEERING AND MANAGEMENT Department of Mechanical Engineering Academic Year: 2017 Semester: EVEN COURSE PLAN Semester: VI SubjectCode&Name:10ME65 Mechatronics & Microprocessor
Appendix - C GOPALAN COLLEGE OF ENGINEERING AND MANAGEMENT Department of Mechanical Engineering Academic Year: 2017 Semester: EVEN COURSE PLAN Semester: VI SubjectCode&Name:10ME65 Mechatronics & Microprocessor
ELEC Sensors and Actuators
 ELEC 483-001 Sensors and Actuators Text Book: SENSORS AND ACTUATORS: System Instrumentation, C. W. d e Silva, CRC Press, ISBN: 1420044834, 2007 Kalyana C. Veluvolu #IT1-817 Tel: 053-950-7232 E-mail: veluvolu@ee.knu.ac.kr
ELEC 483-001 Sensors and Actuators Text Book: SENSORS AND ACTUATORS: System Instrumentation, C. W. d e Silva, CRC Press, ISBN: 1420044834, 2007 Kalyana C. Veluvolu #IT1-817 Tel: 053-950-7232 E-mail: veluvolu@ee.knu.ac.kr
Designing Real-Time Control Applications Using LabVIEW and CompactRIO. Developer Days 2009
 Designing Real-Time Control Applications Using LabVIEW and CompactRIO Developer Days 2009 Agenda CompactRIO Overview Technology Applications Real-Time Control Software Architecture Basic Process Control
Designing Real-Time Control Applications Using LabVIEW and CompactRIO Developer Days 2009 Agenda CompactRIO Overview Technology Applications Real-Time Control Software Architecture Basic Process Control
Pick and Place Robot Simulation
 Pick and Place Robot Simulation James Beukers Jordan Jacobson ECE 63 Fall 4 December 6, 4 Contents Introduction System Overview 3 3 State Space Model 3 4 Controller Design 6 5 Simulation and Results 7
Pick and Place Robot Simulation James Beukers Jordan Jacobson ECE 63 Fall 4 December 6, 4 Contents Introduction System Overview 3 3 State Space Model 3 4 Controller Design 6 5 Simulation and Results 7
Computer Hardware Requirements for Real-Time Applications
 Lecture (4) Computer Hardware Requirements for Real-Time Applications Prof. Kasim M. Al-Aubidy Computer Engineering Department Philadelphia University Real-Time Systems, Prof. Kasim Al-Aubidy 1 Lecture
Lecture (4) Computer Hardware Requirements for Real-Time Applications Prof. Kasim M. Al-Aubidy Computer Engineering Department Philadelphia University Real-Time Systems, Prof. Kasim Al-Aubidy 1 Lecture
Scientech Universal PLC Platform. Features. New
 New In today's environment of automation, the importance of PLC has rapidly increased. Universal PLC Platform is an ideal setup to study the working of PLC's used for industrial applications. has been
New In today's environment of automation, the importance of PLC has rapidly increased. Universal PLC Platform is an ideal setup to study the working of PLC's used for industrial applications. has been
ADVANCED TRAINING INSTITUTE, HYDERABAD
 Revision:01 LEARNING CONTENT Page 1 of 8 III COURSE CODE IA-01 COURSE TITLE PLC PROGRAMMING FOR INDUSTRIAL AUTOMATION OBJECTES On completion of the course, the learner will be able to explain the applications
Revision:01 LEARNING CONTENT Page 1 of 8 III COURSE CODE IA-01 COURSE TITLE PLC PROGRAMMING FOR INDUSTRIAL AUTOMATION OBJECTES On completion of the course, the learner will be able to explain the applications
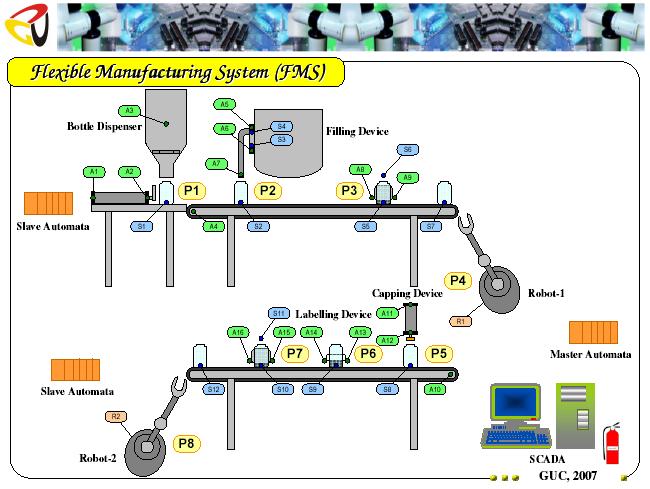
FMS-200 Flexible integrated assembly systems
 FMS-200 Flexible integrated assembly systems Integrated training in industrial automation In the following TECHNOLOGIES... Hydraulics Electrical panel Pneumatics Vacuum Electric Motors SENSORS Identification
FMS-200 Flexible integrated assembly systems Integrated training in industrial automation In the following TECHNOLOGIES... Hydraulics Electrical panel Pneumatics Vacuum Electric Motors SENSORS Identification
Robotic Systems ECE 401RB Fall 2006
 The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 15: Processors Part 3 Chapter 14, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Peripherals
The following notes are from: Robotic Systems ECE 401RB Fall 2006 Lecture 15: Processors Part 3 Chapter 14, G. McComb, and M. Predko, Robot Builder's Bonanza, Third Edition, Mc- Graw Hill, 2006. I. Peripherals
Implementation Of Distributed Control System In Process Control Management Using MATLAB
 Implementation Of Distributed Control System In Process Control Management Using MATLAB Khin Nway Oo, Zaw Min Naing, Hla Myo Tun Abstract: In recent years, process automation has being used in various
Implementation Of Distributed Control System In Process Control Management Using MATLAB Khin Nway Oo, Zaw Min Naing, Hla Myo Tun Abstract: In recent years, process automation has being used in various
What Can You Automate?
 What Can You Automate? Manufacturing Smarter - More Consistent - More Reliable Safe & Collaborative Flexible Deployment Easy to Use Affordable Heavy Steel Base Universal Robot Base Portable & Fixed Mount
What Can You Automate? Manufacturing Smarter - More Consistent - More Reliable Safe & Collaborative Flexible Deployment Easy to Use Affordable Heavy Steel Base Universal Robot Base Portable & Fixed Mount
Project Planning. Module 4: Practice Exercises. Academic Services Unit PREPARED BY. August 2012
 Project Planning PREPARED BY Academic Services Unit August 2012 Applied Technology High Schools, 2012 Module Objectives Upon successful completion of this module, students should be able to: 1. Select
Project Planning PREPARED BY Academic Services Unit August 2012 Applied Technology High Schools, 2012 Module Objectives Upon successful completion of this module, students should be able to: 1. Select
Fire Bird V Insect - Nex Robotics
 Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
Fire Bird V Insect is a small six legged robot. It has three pair of legs driven by one servo each. Robot can navigate itself using Sharp IR range sensors. It can be controlled wirelessly using ZigBee
HARDWARE OF SUPERVISORY CONTROL & DATA ACQUISITION SYSTEM
 Chapter 3 HARDWARE OF SUPERVISORY CONTROL & DATA ACQUISITION SYSTEM Dr. H.K. VERMA Distinguished Professor Department of Electrical and Electronics Engineering School of Engineering and Technology SHARDA
Chapter 3 HARDWARE OF SUPERVISORY CONTROL & DATA ACQUISITION SYSTEM Dr. H.K. VERMA Distinguished Professor Department of Electrical and Electronics Engineering School of Engineering and Technology SHARDA
Embedded Systems. Software Development & Education Center. (Design & Development with Various µc)
") Software Development & Education Center Embedded Systems (Design & Development with Various µc) Module 1: Embedded C Programming INTRODUCTION TO EMBEDDED SYSTEM History & need of Embedded System Basic
Software Development & Education Center Embedded Systems (Design & Development with Various µc) Module 1: Embedded C Programming INTRODUCTION TO EMBEDDED SYSTEM History & need of Embedded System Basic
Dynamics and Vibrations (3C, 3H) Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics
 Equilibrium of rigid bodies and Newton s second low, rotational motion, kinematics of rigid bodies, kinetics") Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Course Description: 610211 Electrical Circuits (1) (3C, 3H) Definitions and Units. Basic Concepts (Charge, Current, Voltage, Power Energy). Circuit Elements (Independent and Dependent Voltage and Current
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
LabVIEW FPGA in Hardware-in-the-Loop Simulation Applications
 LabVIEW FPGA in Hardware-in-the-Loop Simulation Applications Publish Date: Dec 29, 2008 38 Ratings 4.16 out of 5 Overview Hardware-in-the-loop (HIL) simulation is achieving a highly realistic simulation
LabVIEW FPGA in Hardware-in-the-Loop Simulation Applications Publish Date: Dec 29, 2008 38 Ratings 4.16 out of 5 Overview Hardware-in-the-loop (HIL) simulation is achieving a highly realistic simulation
output devices. connected to the controller. data communications link. relay systems. user program. MECH1500Quiz1ReviewVersion2 Name: Class: Date:
 Class: Date: MECH1500Quiz1ReviewVersion2 True/False Indicate whether the statement is true or false. 1. The number and type of I/Os cannot be changed in a fixed PLC. 2. In a PLC system, there is a physical
Class: Date: MECH1500Quiz1ReviewVersion2 True/False Indicate whether the statement is true or false. 1. The number and type of I/Os cannot be changed in a fixed PLC. 2. In a PLC system, there is a physical
Unlocking the Potential of Your Microcontroller
 Unlocking the Potential of Your Microcontroller Ethan Wu Storming Robots, Branchburg NJ, USA Abstract. Many useful hardware features of advanced microcontrollers are often not utilized to their fullest
Unlocking the Potential of Your Microcontroller Ethan Wu Storming Robots, Branchburg NJ, USA Abstract. Many useful hardware features of advanced microcontrollers are often not utilized to their fullest
NPTEL
 NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
NPTEL Syllabus Automation & Sensor Interface Laboratory - Web course COURSE OUTLINE Automation & Sensor interface laboratory is an application oriented course with review of automation principles, followed
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Embedded Robotics. Software Development & Education Center
 Software Development & Education Center Embedded Robotics Robotics Development with 8051 µc INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic
Software Development & Education Center Embedded Robotics Robotics Development with 8051 µc INTRODUCTION TO ROBOTICS Types of robots Legged robots Mobile robots Autonomous robots Manual robots Robotic
Overview of Embedded Systems in Medical Applications
 of Embedded Systems in Medical Applications 1 Embedded Systems Simplistic definition Embedded System Shorthand for Embedded Processor System Embed microprocessor + fixed program in non-computer system
of Embedded Systems in Medical Applications 1 Embedded Systems Simplistic definition Embedded System Shorthand for Embedded Processor System Embed microprocessor + fixed program in non-computer system
Control System Consideration of IR Sensors based Tricycle Drive Wheeled Mobile Robot
 Control System Consideration of IR Sensors based Tricycle Drive Wheeled Mobile Robot Aye Aye New, Aye Aye Zan, and Wai Phyo Aung Abstract Nowadays, Wheeled Mobile Robots (WMRs) are built and the control
Control System Consideration of IR Sensors based Tricycle Drive Wheeled Mobile Robot Aye Aye New, Aye Aye Zan, and Wai Phyo Aung Abstract Nowadays, Wheeled Mobile Robots (WMRs) are built and the control
Ch 5 Industrial Control Systems
 Ch 5 Industrial Control Systems Sections: 1. Process Industries vs. Discrete Manufacturing Industries 2. Continuous vs. Discrete Control 3. Computer Process Control Industrial Control - Defined The automatic
Ch 5 Industrial Control Systems Sections: 1. Process Industries vs. Discrete Manufacturing Industries 2. Continuous vs. Discrete Control 3. Computer Process Control Industrial Control - Defined The automatic
Thomas Bräunl EMBEDDED ROBOTICS. Mobile Robot Design and Applications with Embedded Systems. Second Edition. With 233 Figures and 24 Tables.
 Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Robotics Training Module ABLab Solutions
 Robotics Training Module ABLab Solutions www.ablab.in Table of Contents Course Outline... 4 Introduction to Robotics... 4 Overview of Basic Electronic... 4 Overview of Digital Electronic... 4 Power Supply...
Robotics Training Module ABLab Solutions www.ablab.in Table of Contents Course Outline... 4 Introduction to Robotics... 4 Overview of Basic Electronic... 4 Overview of Digital Electronic... 4 Power Supply...
MECHATRONIC LAB ROOM NO: 4201, MECHANICAL DEPARTMENT INTERCOM: 418. INCHARGE: Mr. M. MOHANDASS, Associate Professor, Mechanical
 MECHATRONIC LAB ROOM NO: 4201, MECHANICAL DEPARTMENT INTERCOM: 418 INCHARGE: Mr. M. MOHANDASS, Associate Professor, Mechanical ASSOCIATE INCHARGE: K. KARTHEE, Assistant Professor, Mechanical SUPPORTING
MECHATRONIC LAB ROOM NO: 4201, MECHANICAL DEPARTMENT INTERCOM: 418 INCHARGE: Mr. M. MOHANDASS, Associate Professor, Mechanical ASSOCIATE INCHARGE: K. KARTHEE, Assistant Professor, Mechanical SUPPORTING
MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape
 SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
SimPowerSystems SimMechanics SimHydraulics SimDriveline SimElectronics MathWorks Technology Session at GE Physical System Modeling with Simulink / Simscape Simscape MATLAB, Simulink September 13, 2012
Controller and Drivers
 Controller and Drivers All ADC's slits can be operated with almost all commercially available controller drivers on the market. We use standard NEMA stepper motors for each axis. Our customers have also
Controller and Drivers All ADC's slits can be operated with almost all commercially available controller drivers on the market. We use standard NEMA stepper motors for each axis. Our customers have also
Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL
 SENIOR PROJECT PROPOSAL") Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL By: Mark Bright and Mike Donaldson Project Advisor: Dr. Gary Dempsey Date: Dec 11, 2008 1 Project Summary Cooling
Engine Control Workstation Using Simulink / DSP Platform (COOLECW) SENIOR PROJECT PROPOSAL By: Mark Bright and Mike Donaldson Project Advisor: Dr. Gary Dempsey Date: Dec 11, 2008 1 Project Summary Cooling
CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT. Test Code: 5936 Version: 01
 CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT ELECTROMECHANICAL ENGINEERING TECHNOLOGY PA Test Code: 5936 Version: 01 Specific competencies and skills tested in this assessment: Technical Documentation and Safety
CUSTOMIZED TEACHER ASSESSMENT BLUEPRINT ELECTROMECHANICAL ENGINEERING TECHNOLOGY PA Test Code: 5936 Version: 01 Specific competencies and skills tested in this assessment: Technical Documentation and Safety
Concurrent Design of Embedded Control Software
 Concurrent Design of Embedded Software Third International Workshop on Multi-Paradigm Modeling MPM`09, 06-10-2009 Marcel Groothuis, Jan Broenink University of Twente, The Netherlands Raymond Frijns, Jeroen
Concurrent Design of Embedded Software Third International Workshop on Multi-Paradigm Modeling MPM`09, 06-10-2009 Marcel Groothuis, Jan Broenink University of Twente, The Netherlands Raymond Frijns, Jeroen
INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT)
") INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT) International Journal of Design and Manufacturing Technology (IJDMT), ISSN 0976 6995(Print), ISSN 0976 6995 (Print) ISSN 0976 7002 (Online)
INTERNATIONAL JOURNAL OF DESIGN AND MANUFACTURING TECHNOLOGY (IJDMT) International Journal of Design and Manufacturing Technology (IJDMT), ISSN 0976 6995(Print), ISSN 0976 6995 (Print) ISSN 0976 7002 (Online)
Advanced NI-DAQmx Programming Techniques with LabVIEW
 Advanced NI-DAQmx Programming Techniques with LabVIEW Agenda Understanding Your Hardware Data Acquisition Systems Data Acquisition Device Subsystems Advanced Programming with NI-DAQmx Understanding Your
Advanced NI-DAQmx Programming Techniques with LabVIEW Agenda Understanding Your Hardware Data Acquisition Systems Data Acquisition Device Subsystems Advanced Programming with NI-DAQmx Understanding Your
SMART / INTELLIGENT TRANSMITTERS AND ACTUATORS
 4 SMART / INTELLIGENT TRANSMITTERS AND ACTUATORS Dr. H. K. Verma Distinguished Professor (EEE) Sharda University, Greater Noida (Formerly: Deputy Director and Professor of Instrumentation Indian Institute
4 SMART / INTELLIGENT TRANSMITTERS AND ACTUATORS Dr. H. K. Verma Distinguished Professor (EEE) Sharda University, Greater Noida (Formerly: Deputy Director and Professor of Instrumentation Indian Institute
DS1103 PPC Controller Board
 Single-Board Hardware DS1103 PPC Controller Board Powerful controller board for rapid control prototyping Key Features Single-board system with comprehensive I/O CAN interface and serial interfaces Interfaces
Single-Board Hardware DS1103 PPC Controller Board Powerful controller board for rapid control prototyping Key Features Single-board system with comprehensive I/O CAN interface and serial interfaces Interfaces
MicroProcessor. MicroProcessor. MicroProcessor. MicroProcessor
 1 2 A microprocessor is a single, very-large-scale-integration (VLSI) chip that contains many digital circuits that perform arithmetic, logic, communication, and control functions. When a microprocessor
1 2 A microprocessor is a single, very-large-scale-integration (VLSI) chip that contains many digital circuits that perform arithmetic, logic, communication, and control functions. When a microprocessor
Hardware-in-the-Loop and Real-Time Testing Techniques
 Hardware-in-the-Loop and Real-Time Testing Techniques Fanie Coetzer Application Engineer The Challenge of Complexity BMW 7 Series: 70 ECUs Lexus 460: 100 ECUs Embedded Control Systems Navigation Control
Hardware-in-the-Loop and Real-Time Testing Techniques Fanie Coetzer Application Engineer The Challenge of Complexity BMW 7 Series: 70 ECUs Lexus 460: 100 ECUs Embedded Control Systems Navigation Control
Motion Gets Smarter with Integrated Actuators
 Motion Gets Smarter with Integrated Actuators Last Printed November 2, 2011 - Design News; Author: Al Presher, Contributing Editor Integrated actuators incorporating more advanced controls and broader
Motion Gets Smarter with Integrated Actuators Last Printed November 2, 2011 - Design News; Author: Al Presher, Contributing Editor Integrated actuators incorporating more advanced controls and broader
WIZTECH AUTOMATION SOLUTIONS (P) LTD., An ISO 9001:2000 and IAO certified company
 LTD., An ISO 9001:2000 and IAO certified company") WIZTECH AUTOMATION SOLUTIONS (P) LTD., An ISO 9001:2000 and IAO certified company #102, W Block, 2nd and 3rd floor, 2nd Avenue, Anna nagar Roundtana, Chennai-40 E-mail: wiztech4automation@gmail.com web:
WIZTECH AUTOMATION SOLUTIONS (P) LTD., An ISO 9001:2000 and IAO certified company #102, W Block, 2nd and 3rd floor, 2nd Avenue, Anna nagar Roundtana, Chennai-40 E-mail: wiztech4automation@gmail.com web:
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Robert G. Landers. Manufacturing Automation and Control Laboratory (130 Toomey)
") Robert G. Landers Broad Areas of Research Interests: Controls applications and manufacturing automation Specific Research Interests: Modeling, analysis, monitoring, and control of manufacturing processes
Robert G. Landers Broad Areas of Research Interests: Controls applications and manufacturing automation Specific Research Interests: Modeling, analysis, monitoring, and control of manufacturing processes
SECTION 1 INTRODUCTION. Walt Kester
 SECTION 1 INTRODUCTION Walt Kester This book deals with sensors and associated signal conditioning circuits. The topic is broad, but the focus of this book is to concentrate on circuit and signal processing
SECTION 1 INTRODUCTION Walt Kester This book deals with sensors and associated signal conditioning circuits. The topic is broad, but the focus of this book is to concentrate on circuit and signal processing
Description: IRB-540 Robot with 6-axis Flexi-Wrist Manipulator, S4P Controller, Conveyor Tracking, and Analog Paint Regulation (APR)
") Standard Module # Description: IRB-540 Robot with 6-axis Flexi-Wrist Manipulator, S4P Controller, Conveyor Tracking, and Analog Paint Regulation (APR) The IRB-540 Flexi-Wrist finishing robot is specifically
Standard Module # Description: IRB-540 Robot with 6-axis Flexi-Wrist Manipulator, S4P Controller, Conveyor Tracking, and Analog Paint Regulation (APR) The IRB-540 Flexi-Wrist finishing robot is specifically
Matlab Simulink Simscape
 Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
Matlab Simulink Simscape 1 / 6 2 / 6 3 / 6 Matlab Simulink Simscape Simscape enables you to rapidly create models of physical systems within the Simulink environment. With Simscape, you build physical
27/05/2016 Friday AN5102: Advanced Digital System Design 06/06/2016 Monday MA5131: Applied Mathematics for Electronics Engineers
 04/06/2016 24/05/2016 25/05/2016 07/06/2016 27/05/2016 01/06/2016 09/06/2016 M.E. APPLIED ELECTRONICS 23/05/2016 Monday AN5104: Advanced Microprocessors and Microcontrollers AN5102: Advanced Digital System
04/06/2016 24/05/2016 25/05/2016 07/06/2016 27/05/2016 01/06/2016 09/06/2016 M.E. APPLIED ELECTRONICS 23/05/2016 Monday AN5104: Advanced Microprocessors and Microcontrollers AN5102: Advanced Digital System
CHAPTER 1: REAL TIME COMPUTER CONTROL
 CHAPTER 1 Page 1 ENGG4420 LECTURE 2 September 08 10 12:49 PM CHAPTER 1: REAL TIME COMPUTER CONTROL REFERENCES: G. F. Franklin et al., ``Feedback Control of Dynamic Systems,`` 5th Edition, Pearson, 2006.
CHAPTER 1 Page 1 ENGG4420 LECTURE 2 September 08 10 12:49 PM CHAPTER 1: REAL TIME COMPUTER CONTROL REFERENCES: G. F. Franklin et al., ``Feedback Control of Dynamic Systems,`` 5th Edition, Pearson, 2006.
Physical Modelling with Simscape
 Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Physical Modelling with Simscape Rick Hyde Control Electrical Embedded Software Mechanical 2015 The MathWorks, Inc. 1 Presentation overview Modelling physical systems Why model a physical system? Network
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
CourseContents: 1.Introduction to MATLAB. 2. Handling data and data flow in MATLAB. 3. Editing and Debugging M-FILES
 CourseContents: 1.Introduction to MATLAB Historical Background Demo & Applications Scope of MATLAB Importance to Engineers Features Vectors & Arrays Accessing MATLAB Help MATLAB Environment Workspace &
CourseContents: 1.Introduction to MATLAB Historical Background Demo & Applications Scope of MATLAB Importance to Engineers Features Vectors & Arrays Accessing MATLAB Help MATLAB Environment Workspace &
Standard Options. Model 4100 Position Indicating Meter. Three Phase Motor Control. Positran Transmitter
 Standard Options Model 4100 Position Indicating Meter A percent-of-full-travel meter is supplied with a trim potentiometer resistor, terminal block and connectors. A potentiometer is required in the actuator
Standard Options Model 4100 Position Indicating Meter A percent-of-full-travel meter is supplied with a trim potentiometer resistor, terminal block and connectors. A potentiometer is required in the actuator
On the basis of degree of freedom of the arm and the type of joints used, a robotic arm can have any of the following designs:
 Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing 20 (2018) 400 405 www.elsevier.com/locate/procedia 2nd International Conference on Materials Manufacturing and Design Engineering
Available online at www.sciencedirect.com ScienceDirect Procedia Manufacturing 20 (2018) 400 405 www.elsevier.com/locate/procedia 2nd International Conference on Materials Manufacturing and Design Engineering
Module 4. Programmable Logic Control Systems. Version 2 EE IIT, Kharagpur 1
 Module 4 Programmable Logic Control Systems Version 2 EE IIT, Kharagpur 1 Lesson 22 The PLC Hardware Environment Version 2 EE IIT, Kharagpur 2 Instructional Objectives After learning the lesson students
Module 4 Programmable Logic Control Systems Version 2 EE IIT, Kharagpur 1 Lesson 22 The PLC Hardware Environment Version 2 EE IIT, Kharagpur 2 Instructional Objectives After learning the lesson students
HART. Actuator Control. Redefining Flow Control
 HART Actuator Control Contents Section Page Introduction 3 Actuator Control 4 HART Module 5 HART Network 5 Point-To-Point Network 6 Multi-Drop Network 6 Commands 7 Control Features 8-9 Device Description
HART Actuator Control Contents Section Page Introduction 3 Actuator Control 4 HART Module 5 HART Network 5 Point-To-Point Network 6 Multi-Drop Network 6 Commands 7 Control Features 8-9 Device Description
SWIFT OUTSTANDING PROPER
 SWIFT OUTSTANDING PROPER SUPPLIES & SERVICES OFFERED: WELDING & IRON WORKS DUCTING MOTORS GENERATORS LIFTERS ELECTRIC CONTROLS & EQUIPMENTS AUTOMATION MECHATRONICS PNEUMATICS SAFETY HVAC Company Profile
SWIFT OUTSTANDING PROPER SUPPLIES & SERVICES OFFERED: WELDING & IRON WORKS DUCTING MOTORS GENERATORS LIFTERS ELECTRIC CONTROLS & EQUIPMENTS AUTOMATION MECHATRONICS PNEUMATICS SAFETY HVAC Company Profile
Rexroth NYCe TAILIDA TRADING CO., LTD. TEL: FAX:
 Electric Drives and Controls Hydraulics Linear Motion and Assembly Technologies Pneumatics Service Rexroth NYCe 4000 System NYCe 4000 system solution - Housing, available in different versions - Motion
Electric Drives and Controls Hydraulics Linear Motion and Assembly Technologies Pneumatics Service Rexroth NYCe 4000 System NYCe 4000 system solution - Housing, available in different versions - Motion
Embedded Systems and Kinetic Art. CS5968: Erik Brunvand School of Computing. FA3800: Paul Stout Department of Art and Art History.
 Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing FA3800: Paul Stout Department of Art and Art History Logistics Class meets Wednesdays from 3:05-6:05 We ll start meeting in MEB
Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing FA3800: Paul Stout Department of Art and Art History Logistics Class meets Wednesdays from 3:05-6:05 We ll start meeting in MEB
Logistics. Embedded Systems. Kinetic Art. This Class. Embedded Systems and Kinetic Art. Kinetic Art
 Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing FA3800: Paul Stout Department of Art and Art History Logistics Class meets Wednesdays from 3:05-6:05 We ll start meeting in MEB
Embedded Systems and Kinetic Art CS5968: Erik Brunvand School of Computing FA3800: Paul Stout Department of Art and Art History Logistics Class meets Wednesdays from 3:05-6:05 We ll start meeting in MEB
Multi-agent Collaborative Flight Experiment. Karl Hedrick UC Berkeley
 Multi-agent Collaborative Flight Experiment Karl Hedrick UC Berkeley 1 Operated by the Naval Post Graduate School 2 !!" " #! " " $! %&!! % " ' "!! " $! %" " " %" $ " ' "!!" ("!! " $" " " ' $ " ' ) " $!*
Multi-agent Collaborative Flight Experiment Karl Hedrick UC Berkeley 1 Operated by the Naval Post Graduate School 2 !!" " #! " " $! %&!! % " ' "!! " $! %" " " %" $ " ' "!!" ("!! " $" " " ' $ " ' ) " $!*
INDUSTRIAL CONTROL SYSTEMS & COMPUTER PROCESS CONTROL
 1 INDUSTRIAL CONTROL SYSTEMS & COMPUTER PROCESS CONTROL INDUSTRIAL CONTROL - DEFINED The automatic regulation of unit operations and their associated equipment as well as the integration and coordination
1 INDUSTRIAL CONTROL SYSTEMS & COMPUTER PROCESS CONTROL INDUSTRIAL CONTROL - DEFINED The automatic regulation of unit operations and their associated equipment as well as the integration and coordination
Keywords: PLC, Three-Phase Induction Motor, AC Current Sensor, Proximity Sensor, AC Voltage Sensor.
 IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY Protection and Control of Three-Phase Induction Motor using Crouzet Millenium PLC K.L.Priyanka *, Dr. M.Chakravarthy * PG-Student,
IJESRT INTERNATIONAL JOURNAL OF ENGINEERING SCIENCES & RESEARCH TECHNOLOGY Protection and Control of Three-Phase Induction Motor using Crouzet Millenium PLC K.L.Priyanka *, Dr. M.Chakravarthy * PG-Student,
Control of a quadrotor manipulating a beam (2 projects available)
") Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
Control of a quadrotor manipulating a beam (2 projects available) Supervisor: Emanuele Garone (egarone@ulb.ac.be), Tam Nguyen, Laurent Catoire General Goal: The goal of this project is to complete from
MB Millenium Single- and Multi-Axis Vibration and Motion Control System
 General Overview: The MB Millenium Dynamic Test Controller from MB Dynamics is a multiple-input, multiple-output (MIMO) and/or a multiple-input, single-output (MISO) dynamic test control system. It reliably
General Overview: The MB Millenium Dynamic Test Controller from MB Dynamics is a multiple-input, multiple-output (MIMO) and/or a multiple-input, single-output (MISO) dynamic test control system. It reliably
Advance Robotics with Embedded System Design (ARESD)
") Advance Robotics with Embedded System Design (ARESD) LEARN HOW TO: Use Arduino hardware &Arduino programming for microcontroller based hobby project development Use WinAVRcross compiler formicrocontroller
Advance Robotics with Embedded System Design (ARESD) LEARN HOW TO: Use Arduino hardware &Arduino programming for microcontroller based hobby project development Use WinAVRcross compiler formicrocontroller
Control System Implementation
 Control System Implementation Hardware implementation Electronic Control systems are also: Members of the Mechatronic Systems Concurrent design (Top-down approach?) Mechanic compatibility Solve the actual
Control System Implementation Hardware implementation Electronic Control systems are also: Members of the Mechatronic Systems Concurrent design (Top-down approach?) Mechanic compatibility Solve the actual
INTRODUCTION TABLE OF CONTENTS 1 INTRODUCTION WELCOME TO THE 2009 FRC CONTROL SYSTEM Suggestions for Getting Started 2
 Section 1 INTRODUCTION TABLE OF CONTENTS 1 INTRODUCTION 2 1.1 WELCOME TO THE 2009 FRC CONTROL SYSTEM 2 1.1.1 Suggestions for Getting Started 2 1.2 TECHNICAL SUPPORT FOR THE 2009 FRC CONTROL SYSTEM 2 1.3
Section 1 INTRODUCTION TABLE OF CONTENTS 1 INTRODUCTION 2 1.1 WELCOME TO THE 2009 FRC CONTROL SYSTEM 2 1.1.1 Suggestions for Getting Started 2 1.2 TECHNICAL SUPPORT FOR THE 2009 FRC CONTROL SYSTEM 2 1.3
What Can You Automate? We Sell Robots
 AUTOMATION SOLUTIONS What Can You Automate? We Sell Robots Let Numatic Engineering s Value Add Services help keep your resources focused on your company s core business. Assembly Manufacturing Outsourcing
AUTOMATION SOLUTIONS What Can You Automate? We Sell Robots Let Numatic Engineering s Value Add Services help keep your resources focused on your company s core business. Assembly Manufacturing Outsourcing
Mechatronics Resources. for high school. Mechatronics Resources. Preparing your students for success. 21st century learning. Aligned to standards
 Preparing your students for success Mechatronics Resources 21st century learning Aligned to standards Knowledge and skills lessons Mechatronics Resources for high school Welcome We re LJ Create, Education
Preparing your students for success Mechatronics Resources 21st century learning Aligned to standards Knowledge and skills lessons Mechatronics Resources for high school Welcome We re LJ Create, Education
MAS-200 Modular assembly system
 MAS-200 Modular assembly system Modular training system which emulates a real industrial assembly process In the following TECHNOLOGIES... Electrical panel Pneumatics Vacuum SENSORS Identification systems
MAS-200 Modular assembly system Modular training system which emulates a real industrial assembly process In the following TECHNOLOGIES... Electrical panel Pneumatics Vacuum SENSORS Identification systems
Question & its answer Remark Total marks 01 Attempt any THREE 12. a) State any three different tools used for Automation. 04 Ans.
 State any three different tools used for Automation. 04 Ans.") Important Instructions to examiners: 1) The answers should be examined by keywords and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate may
Important Instructions to examiners: 1) The answers should be examined by keywords and not as word-to-word as given in the model answer scheme. 2) The model answer and the answer written by candidate may
Module 1. Introduction to Mechatronics. Fundamentals of Mechatronics (MH501)
") Module 1 Introduction to Mechatronics Fundamentals of Mechatronics (MH501) Dr. Atul Thakur, Assistant Professor Department of Mechanical Engineering Indian Institute of Technology Patna Autumn 2017 Module
Module 1 Introduction to Mechatronics Fundamentals of Mechatronics (MH501) Dr. Atul Thakur, Assistant Professor Department of Mechanical Engineering Indian Institute of Technology Patna Autumn 2017 Module
7415 x. Made in Germany. fluid sensors and diagnostic systems. position sensors and object recognition bus, identification and control systems
 7 x Made in Germany 00 fluid sensors and diagnostic systems position sensors and object recognition bus, identification and control systems Easy adjustment and parameter setting. Clear CD display with
7 x Made in Germany 00 fluid sensors and diagnostic systems position sensors and object recognition bus, identification and control systems Easy adjustment and parameter setting. Clear CD display with
An open source, modular, robotic control system for building 3D printers, CNC routers, and other robotics applications
 JuicyBoard An open source, modular, robotic control system for building 3D printers, CNC routers, and other robotics applications Overview JuicyBoard is the foundation of a modular, open source platform
JuicyBoard An open source, modular, robotic control system for building 3D printers, CNC routers, and other robotics applications Overview JuicyBoard is the foundation of a modular, open source platform
Circuit Diagram For Water Level Controller Using 8051 Microcontroller With Pin Configuration
 Circuit Diagram For Water Level Controller Using 8051 Microcontroller With Pin Configuration This is the circuit diagram water level controller using microcontroller Free diagram for water level controller
Circuit Diagram For Water Level Controller Using 8051 Microcontroller With Pin Configuration This is the circuit diagram water level controller using microcontroller Free diagram for water level controller
TEVATRON TECHNOLOGIES PVT. LTD Embedded! Robotics! IoT! VLSI Design! Projects! Technical Consultancy! Education! STEM! Software!
 Summer Training 2016 Advance Embedded Systems Fast track of AVR and detailed working on STM32 ARM Processor with RTOS- Real Time Operating Systems Covering 1. Hands on Topics and Sessions Covered in Summer
Summer Training 2016 Advance Embedded Systems Fast track of AVR and detailed working on STM32 ARM Processor with RTOS- Real Time Operating Systems Covering 1. Hands on Topics and Sessions Covered in Summer
Essential Technologies for Industrial Machine Design and Prototyping
 Essential Technologies for Industrial Machine and Prototyping 1 Mechatronics: Streamlined Approach to Machine 2 Mechanical 3 1 Requirements Electrical Control Virtual Prototype (Simulation) Physical Prototype
Essential Technologies for Industrial Machine and Prototyping 1 Mechatronics: Streamlined Approach to Machine 2 Mechanical 3 1 Requirements Electrical Control Virtual Prototype (Simulation) Physical Prototype
Teaching, Applied Research and Development: From Academia to Industry
 Teaching, Applied Research and Development: From Academia to Industry Prof. Dr. Raoul Herzog University of Applied Sciences Western Switzerland (HES-SO) HEIG-VD, Yverdon-les-Bains June 9, 2015 2015 The
Teaching, Applied Research and Development: From Academia to Industry Prof. Dr. Raoul Herzog University of Applied Sciences Western Switzerland (HES-SO) HEIG-VD, Yverdon-les-Bains June 9, 2015 2015 The
COMPLEX EMBEDDED SYSTEMS
 COMPLEX EMBEDDED SYSTEMS Embedded System Design and Architectures Summer Semester 2012 System and Software Engineering Prof. Dr.-Ing. Armin Zimmermann Contents System Design Phases Architecture of Embedded
COMPLEX EMBEDDED SYSTEMS Embedded System Design and Architectures Summer Semester 2012 System and Software Engineering Prof. Dr.-Ing. Armin Zimmermann Contents System Design Phases Architecture of Embedded
Apprenticeship Curriculum Standard. Level 3. Trade Code: 447A
 Apprenticeship Curriculum Standard Instrumentation and Control Technician Level 3 Trade Code: 447A Development Date: 2008 Please Note: Apprenticeship Training and Curriculum Standards were developed by
Apprenticeship Curriculum Standard Instrumentation and Control Technician Level 3 Trade Code: 447A Development Date: 2008 Please Note: Apprenticeship Training and Curriculum Standards were developed by
XBee Based Robotic ARM Control for Bomb Diffuser
 XBee Based Robotic ARM Control for Bomb Diffuser Introduction: Bomb-disposal, or explosive ordnance disposal (EOD), robots are one of the many tools a technician might use to disarm dangerous weapons.
XBee Based Robotic ARM Control for Bomb Diffuser Introduction: Bomb-disposal, or explosive ordnance disposal (EOD), robots are one of the many tools a technician might use to disarm dangerous weapons.
PLC Fundamentals. Module 2: Hardware and Terminology. Academic Services Unit PREPARED BY. August 2011
 PLC Fundamentals Module 2: Hardware and Terminology PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module 2: Hardware and Terminology Module
PLC Fundamentals Module 2: Hardware and Terminology PREPARED BY Academic Services Unit August 2011 Applied Technology High Schools, 2011 ATE1212 PLC Fundamentals Module 2: Hardware and Terminology Module
Electronic Control systems are also: Members of the Mechatronic Systems. Control System Implementation. Printed Circuit Boards (PCBs) - #1
 - #1") Control System Implementation Hardware implementation Electronic Control systems are also: Members of the Mechatronic Systems Concurrent design (Top-down approach?) Mechanic compatibility Solve the actual
Control System Implementation Hardware implementation Electronic Control systems are also: Members of the Mechatronic Systems Concurrent design (Top-down approach?) Mechanic compatibility Solve the actual
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Overview of Microcontroller and Embedded Systems
 UNIT-III Overview of Microcontroller and Embedded Systems Embedded Hardware and Various Building Blocks: The basic hardware components of an embedded system shown in a block diagram in below figure. These
UNIT-III Overview of Microcontroller and Embedded Systems Embedded Hardware and Various Building Blocks: The basic hardware components of an embedded system shown in a block diagram in below figure. These
Magnetic Defectoscope System DEF-1C-IH2 Datasheet and Operation Instruction SYSTEM DESCRIPTION 1. MECHANICAL MODULE
 SYSTEM DESCRIPTION The Magnetic Defectoscope System DEF-1C-IH2 allows users to perform a fast, high resolution inspection of permanent magnet assemblies. The Magnetic Defectoscope is equipped with inductive
SYSTEM DESCRIPTION The Magnetic Defectoscope System DEF-1C-IH2 allows users to perform a fast, high resolution inspection of permanent magnet assemblies. The Magnetic Defectoscope is equipped with inductive
Real Time Control of the MIT Vehicle Emulator System
 Proceedings of the 1991 American Control Conference June, 1991, Boston, MA Real Time Control of the MIT Vehicle Emulator System William K. Durfee, Husni R. Idris and Steven Dubowsky Department of Mechanical
Proceedings of the 1991 American Control Conference June, 1991, Boston, MA Real Time Control of the MIT Vehicle Emulator System William K. Durfee, Husni R. Idris and Steven Dubowsky Department of Mechanical
AUTOMATION. Dr. Ibrahim Al-Naimi
 AUTOMATION Dr. Ibrahim Al-Naimi Chapter four Industrial Control Systems Process and Discrete Industries Level of automation. Variables and parameters. Continuous and Discrete Variables/Parameters Continuous
AUTOMATION Dr. Ibrahim Al-Naimi Chapter four Industrial Control Systems Process and Discrete Industries Level of automation. Variables and parameters. Continuous and Discrete Variables/Parameters Continuous
Integration of Microcontroller System Design In Mechatronic Education Low Cost Solutions
 th IFToMM World Congress, Besançon (France), June8-, 007 Integration of Microcontroller System Design In Mechatronic Education Low Cost Solutions R. Bălan * V. Mătieş O. Hancu S.-D. Stan Technical University
th IFToMM World Congress, Besançon (France), June8-, 007 Integration of Microcontroller System Design In Mechatronic Education Low Cost Solutions R. Bălan * V. Mătieş O. Hancu S.-D. Stan Technical University
Method for designing and controlling compliant gripper
 IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Method for designing and controlling compliant gripper To cite this article: A R Spanu et al 2016 IOP Conf. Ser.: Mater. Sci.
IOP Conference Series: Materials Science and Engineering PAPER OPEN ACCESS Method for designing and controlling compliant gripper To cite this article: A R Spanu et al 2016 IOP Conf. Ser.: Mater. Sci.
Automated Industrial Wind Tunnel Network Control with LabView
 Automated Industrial Wind Tunnel Network Control with LabView Senior Project Proposal Matt Draear Advisor: Alexander Malinowski November 15, 2012 Project Summary The purpose of this project is to upgrade
Automated Industrial Wind Tunnel Network Control with LabView Senior Project Proposal Matt Draear Advisor: Alexander Malinowski November 15, 2012 Project Summary The purpose of this project is to upgrade
Industrial Automation & Instrumentation
 Industrial Automation & Instrumentation November 16, 2017 By: ENGR. GAMALIEL F. ITAO, P.E.E, M.Entr. President, ICC-MTC ABSTRACT The paper deals with the definition of Instrumentation and (Industrial)
Industrial Automation & Instrumentation November 16, 2017 By: ENGR. GAMALIEL F. ITAO, P.E.E, M.Entr. President, ICC-MTC ABSTRACT The paper deals with the definition of Instrumentation and (Industrial)
D115 The Fast Optimal Servo Amplifier For Brush, Brushless, Voice Coil Servo Motors
 D115 The Fast Optimal Servo Amplifier For Brush, Brushless, Voice Coil Servo Motors Ron Boe 5/15/2014 This user guide details the servo drives capabilities and physical interfaces. Users will be able to
D115 The Fast Optimal Servo Amplifier For Brush, Brushless, Voice Coil Servo Motors Ron Boe 5/15/2014 This user guide details the servo drives capabilities and physical interfaces. Users will be able to
Project Proposal Guide MATHWORKS TRACK Disclaimer:
 Project Proposal Guide MATHWORKS TRACK Disclaimer: The sample proposal below is to give an idea of how a proposal should be formatted. Our main objective is to illustrate the Design Methodology section
Project Proposal Guide MATHWORKS TRACK Disclaimer: The sample proposal below is to give an idea of how a proposal should be formatted. Our main objective is to illustrate the Design Methodology section