image filtration i Ole-Johan Skrede INF Digital Image Processing
|
|
|
- Mildred Wells
- 6 years ago
- Views:
Transcription
1 image filtration i Ole-Johan Skrede INF Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides by Fritz Albregtsen
2 messages The first mandatory assignment: Tentative posting date: Wednesday Tentative submission deadline: Friday
3 today s lecture Neighbourhood operations Convolution and correlation Low pass filtering Sections in Gonzales & Woods: 2.6.2: Linear versus Nonlinear Operations 3.1: Background 3.4: Fundamentals of Spatial Filtering 3.5: Smoothing spatial Filtering 5.3: Restoration in the Presence of Noise Only Spatial Filtering : Matching by correlation 2
4 image filtering
5 overview A general tool for processing digital images. One of the mostly used operations in image processing. Typical utilities: Image improvement Image analysis Remove or reduce noise Improve percieved sharpness Highlight edges Highlight texture 4
6 spatial filtering The filter (or filter kernel) is defined by a matrix, e.g. w = w[ 1, 1] w[ 1, 0] w[ 1, 1] w[0, 1] w[0, 0] w[0, 1] w[1, 1] w[1, 0] w[1, 1] Filter kernels are often square with odd side lenghts. In this lecture, we will always assume odd side lengths unless otherwise is specified. As with images, we index the filter as w[x, y], where the positive x axis is downward and the positive y axis is to the right. The origin of the filter is at the filter center. We use the names filter and filter kernel interchangeably. Other names are filter mask and filter matrix. The result of the filtering is determined by the size of the filter and the values in the filter. 5
7 general image filtering Figure 1: Example of an image and a 3 3 filter kernel. 6
8 convolution introduction and example
9 convolution In image analysis 1, convolution is a binary operation, taking an image f and a filter (also an image) w, and producing an image g. We use an asterisk to denote this operation f w = g. For an element [x, y], the operation is defined as S T g[x, y] = (f w)[x, y] := f[x s, y t]w[s, t]. s= S t= T 1 This is really just an ordinary discrete convolution, the discrete version of a continuous convolution. 8
10 convolution Let us walk through a small example, step by step Figure 2: Extract of an image f, a 3 3 filter kernel with values, and a blank result image g. The colored squares indicate which elements will be affected by the convolution. Notice that we are in the interior of the image, this is because boundaries require some extra attention. We will deal with boundary conditions later. 9
11 convolution 1 locations First, our indices (x, y), will be as indicated by the figure, and we will only affect values inside the coloured squares. In this example. S = 1 and T = 1. g[x, y] = (f w)[x, y] := 1 s= 1 t= 1 1 f[x s, y t]w[s, t]. Figure 3: Locations in first convolution. 10
12 convolution 1 step 1: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
13 convolution 1 step 2: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
14 convolution 1 step 3: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
15 convolution 1 step 4: s = 0, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
16 convolution 1 step 5: s = 0, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
17 convolution 1 step 6: s = 0, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
18 convolution 1 step 7: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
![convolution 1 step 8: s = 1, t = 0 1 1 g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1](/docs-images/77/75148032/images/19-0.jpg "g[x, y] = 0.1 11 + 0.2 10 + 0.3 9 + 0.4 7 + 0.5 6 + 0.6 5 + 0.7 3 + 0.8 2 = 18.")
19 convolution 1 step 8: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
20 convolution 1 step 9: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
21 convolution 2 step 1: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
22 convolution 2 step 9: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
23 convolution 3 step 9: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =
24 convolution 4 step 9: s = 1, t = g[x, y] = f[x s, y t]w[s, t] s= 1 t= 1 g[x, y] = =

25 useful mental image A useful way of thinking about convolution is to 1. Rotate the filter 180 degrees. 2. Place it on top of the image in the image s top left corner. 3. Slide it across each column until you hit the top right corner. 4. Start from the left again, but now, one row below the previous. 5. Repeat step 3. followed by 4. until you have covered the whole image. Also, check out this nice interactive visualization: 24
26 boundary treatment
27 different modes We differentiate between three different modes when we filter one image with another: Full: We get an output response at every point of overlap between the image and the filter. Same: The origin of the filter is always inside the image, and we pad the image in order to preserve the image size in the result. Valid: We only record a response as long as there is full overlap between the image and the whole filter. 26
28 full mode This can be written as as long as (f w)[x, y] = f[x s, y t]w[s, t] s= t= (x s) is a row in f and s is a row in w (1) for some s, and (y t) is a column in f and t is a column in w (2) for some t. 27
29 full mode size If f is of size 1 M N and w of size P Q, assuming M P and N Q, the output image will be of size M + P 1 N + Q 1. That is, Number of rows: M + P 1. Number of columns: N + Q 1. 1 We use the rows columns convention when describing the size of an image. 28
30 full mode example full =
31 valid mode This can be written as as long as (f w)[x, y] = f[x s, y t]w[s, t] s= t= (x s) is a row in f and s is a row in w (3) for all s, and (y t) is a column in f and t is a column in w (4) for all t. 30
32 valid mode size If f is of size M N and w of size P Q, assuming M P and N Q, the output image will be of size M P + 1 N Q + 1. That is Number of rows: M P + 1. Number of columns: N Q
33 valid mode example valid = [ ] 32
34 same mode This is the same as valid mode, except that we pad the input image (add values outside the original boundary) such that the output size is the same as the original image. We will cover three types of paddings, and use a 1D example to illustrate. In the 1D example, we assume an original signal of length 5, and we pad with 2 on each side, furthermore we use to indicate the original boundary. Zero padding [0, 0 1, 2, 3, 4, 5 0, 0] Symmetrical padding [2, 1 1, 2, 3, 4, 5 5, 4] Circular padding [4, 5 1, 2, 3, 4, 5 1, 2] 33
35 same mode size For a filter with size P Q, we must pad the image with P 1 2 rows on each side, and Q 1 2 columns on each side. We can check that this will produce an output of size M N by calculating the output side from the valid mode: [ ] P 1 M + 2 P + 1 = M 2 [ ] Q 1 N + 2 Q + 1 = N 2 (5) 34
36 same mode zero padding Can also pad with other constant values than same zero =
37 same mode symmetric padding Also known as mirrored padding or reflective padding same symmetric =
38 same mode circular padding Also known as wrapping same circular =
39 properties, general case Commutative Associative Distributive (f w)[x, y] = Associative with scalar multiplication = S T s= S t= T x+s y+t s=x S t=y T f[x s, y t]w[s, t] f[s, t]w[x s, y t] f g = g f (f g) h = f (f h) f (g + h) = f g + f h α(f g) = (αf) g = f (αg) 38
40 correlation and template matching
41 correlation In this case, correlation is a binary operation, taking an image f and a filter (also an image) w, and producing an image g. For an element [x, y], the operation is defined as g[x, y] = (f w)[x, y] := S T s= S t= T f[x + s, y + t]w[s, t]. Very similar to convolution. Equivalent if the filter is symmetric. For the mental image, it is the same as convolution, without the rotation of the kernel in the beginning. In general not associative, which is important in some cases. Less important in other cases, such as template matching. 40
42 template matching We can use correlation to match patterns in an image. Remember to normalize the image and the filter with their respective means. 41


43 template matching example You can find an example implementation in python at (separable_timing.ipynb). 42
44 neighbourhood operators
45 filtering in the image domain In general, we can view filtering as the application of an operator that computes the result image s value in each pixel (x, y) by utilizing the pixels in the input image in a neighbourhood around (x, y) g[x, y] = T (f[n (x, y)]) In the above, we assume that g[x, y] is the value of g at location (x, y) and f[n (x, y)] is the value(s) in the neighbourhood N (x, y) of (x, y). T is some operator acting on the pixel values in the neighbourhood. 44
, and a 3 3 neighbourhood centered at (x + 4, y + 5).")
46 neighbourhood The neighbourhood of the filter gives the pixels around (x, y) in the input image that the operator (potentially) use. Figure 6: Neighbourhood example, a 5 5 neighbourhood centered at (x, y), and a 3 3 neighbourhood centered at (x + 4, y + 5). 45
47 neighbourhood in practice Squares and rectangles are most common. For symmetry reasons, the height and width is often odd, making the location of the center point at a pixel. When nothing else is specified, the origin of the neighbourhood is at the center pixel. If the neighbourhood is of size 1 1, T is grayscale transform. If T is equal over the whole image, we say that T is a global operator. If the neighbourhood size is greater than 1 1, we term T as a local operator (even if T is position invariant). 46
48 neighbourhood + operator = filter Neighbourhood Define the set of pixels around (x, y) in the input image where T operates. Operator Filter Defines the operation done on the values in the pixels in the neighbourhood. Also called a transform or an algorithm. A filter is an operator operating on a neighbourhood, that is, two filters are equivalent only if both the neighbourhood and the operator are equal. 47
49 additivity A filter is said to be additive if T ((f 1 + f 2 )[N (x, y)]) = T (f 1 [N (x, y)]) + T (f 2 [N (x, y)]) where T is the operator. N (x, y) is the neighbourhood around an arbitrary pixel (x, y). f 1 and f 2 are arbitrary images. 48
50 homogeneity A filter is said to be homogeneous if T (αf[n (x, y)]) = αt (f[n (x, y)]) where T is the operator. N (x, y) is the neighbourhood around an arbitrary pixel (x, y). f is an arbitrary image. α is an arbitrary scalar value. 49
51 linearity A filter is said to be linear if it is both additive and homogeneous, that is, if T ((αf 1 + βf 2 )[N (x, y)]) = αt (f 1 [N (x, y)]) + βt (f 2 [N (x, y)]) where T is the operator. N (x, y) is the neighbourhood around an arbitrary pixel (x, y). f 1 and f 2 are arbitrary images. α and β are arbitrary scalar values. 50
52 position invariance A filter is said to be position invariant if where T is the operator. T (f[n (x s, y t)]) = g(x s, y t) N (x, y) is the neighbourhood around an arbitrary pixel (x, y). f 1 and f 2 are arbitrary images. g(x, y) = T (f[n (x, y)]) for all (x, y). (s, t) is an arbitrary position shift. In other words, the value of the result image at (x, y) is only dependent of the values in the neighbourhood of (x, y), and not dependent on the positions. 51
53 separable filters A 2D filter w, is said to be separable if the filtration can be done with two sequential 1D filtrations, w V and w H. In other words, if w = w V w H An example is a 5 5 mean filter [ ] =
54 separable filters are faster From the associativity of convolution, with f as an image and w = w V w H, we get f w = f (w V w H ) = (f w V ) w H As can be seen, we can now do two convolutions with a 1D filter, in stead of one convolution with a 2D filter, that is g = f w, vs. h = f w V g = h w H 2D 1D 1D 53
55 implementation Illustrative (ignores padding etc.) examples of implementations, where f, input image, size [M, N] w, 2D filter kernel, size [L, L], (S = T = (L - 1) / 2) w_v, w_h, vertical filter kernels, size [L] h, temporary filtered image, size [M, N] g, filtered image, size [M, N] 1 # Convolution with 2D f i l t e r 2 for x in range (M) : 3 for y in range (N) : 4 for s in range( S, S ) : 5 for t in range( T, T ) : 6 g [ x, y ] = f [ x s, y t ] *w[ s, t ] 7 1 # Convolution with 2 1D f i l t e r s 2 for x in range (M) : 3 for y in range (N) : 4 for s in range( S, S ) : 5 h [ x, y ] = f [ x s, y ] * w_v [ s ] 6 for x in range (M) : 7 for y in range (N) : 8 for t in range( T, T ) : 9 g [ x, y ] = h [ x, y t ] * w_h[ t ] 10 54
56 how much faster? complexity For an M N image and a square filter kernel with sidelengths L, a (naive) 2D convolution implementation would have complexity of O(MNL 2 ), while a (naive) 1D convolution implementation would have complexity of So the speed up should be linear in L. O(MNL). 55
57 flops Looking back at our naive implementations, we see that in the case of the 2D filter, we have about MNL 2 multiplications and MN(L 2 1) additions, so about flops nonsep = MNL 2 + MN(L 2 1) = MN(2L 2 1) floating point operations (FLOPS). For the case with 2 1D filters, we have about 2MNL multiplications and 2MN(L 1), which is then flops sep = 2MNL + 2MN(L 1) = 2MN(2L 1). 56
58 how much faster? flops We can get an idea of the speedup by looking at flops nonsep = 2L2 1 flops sep 4L 2 2L So the 2D case should be about L times slower than the separable case. For a concrete example, take a look here: 57
59 intermezzo how did we arrive at the asymptotic speed up I do not like math magic in my slides, so I will now show how 2L 2 1 4L 2 2L We say that they are asymptotically equivalent, and write to symbolise this. This simply means that the one approaches the other as L increases. 2L 2 1 4L 2 = L2 2L 1 1 4L 2 L 2 (2L + 1) = (2L 1)(2L + 1) 1 4L 2 = L 2 1 (2L) 2 (2L + 1) 12 4L 2 L 2 1 = (4L 2 (2L + 1) 1) 4L = (4 1 (2L + 1) L ) 4L 2 2 L 2L
60 convolution with update Convolution filters with identical columns or rows can be implemented efficiently by updating already computed values. 1. Compute the response r x,y at a pixel (x, y). 2. Compute the response in the next pixel from r xy : Identical columns: r x,y+1 = r x,y C 1 + C L, where C 1 is the column response from the first column when the kernel origin is at (x, y), and C L is the column response from the last column when the kernel origin is at (x, y + 1). Identical rows: r x+1,y = r x,y R 1 + R L, where R 1 is the row response from the first row when the kernel origin is at (x, y), and R L is the row response from the last row when the kernel origin is at (x + 1, y). 3. Repeat from 2. 59

61 convolution with update illustration Figure 7: Top: reusing columns; bottom: reusing rows. 60
62 convolution with update speed gain C 1, C L, R 1 and R L can (individually) be computed with L multiplications and L 1 additions. This means that computing the new response requires 2L multiplications and 2L additions. This is as fast as separability. If we ignore the initialization; we must compute one full convolution to restart the updates at every new row or column. All filters that can be updated in this way, is also separable. Conversly, separable filters need not be updatable. Can be combined with separability when a 1D filter is uniform. Uniform filters can be computed even faster. Each update only needs 2 subtractions and 1 addition. Only filters that are proportional to the mean value filter are uniform. 61
63 low-pass filters
64 some common filter categories Low-pass filters Lets through low frequencies, stops high frequencies. Blurs the image. High-pass filters Lets through high frequencies, stops low frequencies. Sharpens the image. Band-pass filters Lets through frequencies in a certain range. Feauture detection filters Used for detection of features in an image. Features such as edges, corners and texture. 63
65 low-pass filter overview Lets through low frequencies (large trends and slow variations in an image). Stops or damps high frequencies (noise, details and sharp edges in an image). We will learn more about frequencies in the lectures about Fourier transforms. The resulting image is a smeared, smoothed or blurred version of the original image. Typical applications: Remove noise, locate larger objects in an image. Challenging to preserve edges. 64
66 mean value filter Computes the mean value in the neighbourhood. All weights (values in the filter) are equal. The sum of the weights is equal to 1. The neighbourhood size determines the blurring magnitude. Large filter: Loss of details, more blurring. Small filter: Preservation of details, less blurring , ,

67 mean value filter example (a) Original (b) 3 3 (c) 9 9 (d) Figure 8: Gray level Mona Lisa image filtered with a mean value filter of different sizes. 66

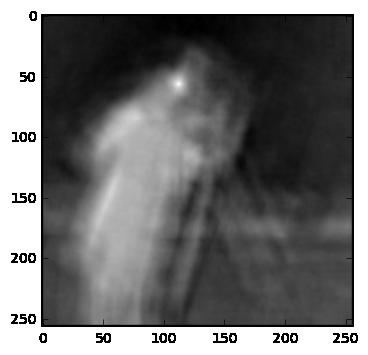
68 mean value filtering locate large objects Objective: Locate large, bright objects. Possible solution: mean value filtering followed by a global thresholding. Figure 9: Left: Image obtained with the Hubble Space Telescope. Middle: Result after mean value filtering. Right: Result after global thresholding of the filtered image. 67
![gaussian filter For integer valus x, y, let w[x, y] = A exp { x2 + y 2 } 2σ 2 where A is usually such that x y w[x, y] = 1. This is a non-uniform low-pass filter.](/docs-images/77/75148032/images/69-0.jpg "The parameter σ is the standard deviation and controls the amount of smoothing. Small σ: Less smoothing Large σ: More smoothing A Gaussian filter smooths less than a uniform filter of the same size.")
69 gaussian filter For integer valus x, y, let w[x, y] = A exp { x2 + y 2 } 2σ 2 where A is usually such that x y w[x, y] = 1. This is a non-uniform low-pass filter. The parameter σ is the standard deviation and controls the amount of smoothing. Small σ: Less smoothing Large σ: More smoothing A Gaussian filter smooths less than a uniform filter of the same size. (a) σ = 1 (b) σ = 2 Figure 10: Continuous bivariate Gaussian with different σ. Implementation can be found at 68
70 approximation of gaussian filter A 3 3 Gaussian filter can be approximated as w = This is separable as 4 1D filters 1 2 [1, 1]: [ ] w = [ 1 1 [ ] ] 1 2 [ 1 1 [ ] = ] 1 4 [ ]. Or two 1D filters 1 4 [1, 2, 1]: w = [ ]. 69
, and/or geometrically (by pixel location).")
71 edge-preserving noise filtering We often use low-pass filters to reduce noise, but at the same time, we want to keep edges. There exists a lot of edge-preserving filters. Many works by utilising only a sub-sample of the neighbourhood. This could be implemented by sorting pixels radiometrically (by pixel value), and/or geometrically (by pixel location). In the example from fig. 11, we could choose to only include contributions from within the blue ball. Figure 11: Blue ball on white background. Red square to illustrate filter kernel. 70
72 rank filtering We create a one-dimensional list of all pixel values around (x, y). We then sort this list. Then, we compute the response from (x, y) from one element in the sorted list, or by some weighted sum of the elements. This is a non-uniform filter. 71
73 median filtering A rank filter where we choose the middle value in the sorted list of values in the neighbourhood of (x, y). One of the most frequently used edge-preserving filters. Especially well-suited for reducing impulse-noise (aka. salt-and-pepper-noise ). Not unusual with non-rectangular neighbourhood, e.g. plus-shaped neighbourhoods. Some challenges: Thin lines can dissappear Corners can be rounded Objects can be shrinked The size and shape of the neighbourhood is important 72

74 mean value- and median- filters Figure 12: Left: Image with salt and pepper noise. Middle: Mean value filtering. Right: Median filtering. 73
75 mean value- and median- filters Mean value filter: The mean value inside the neighbourhood. Smooths local variations and noise, but also edges. Especially well suited on local variations, e.g. mild noise in many pixel values. Median value filter: The median value inside the neighbourhood Better for certain types of noise and preserves edges better. Worse on local variations and other kinds of noise. Especially well suited for salt-and-pepper-noise. 74

76 median filters and corners Figure 13: Left: Quadratic neighbourhood rounds corners. Right: pluss-shaped neighbourhood preserves corners. 75
77 faster median filters (cursory reading) Sorting pixel values are slow (general worst case: O(n log(n)), where n is the number of elements (here, n = L 2 )). Using histogram-updating techniques, we can achieve O(L) 1 Utilizing histogram-updating even more, we can achieve O(1) 1 1 Huang, T.S., Yang, G.J., Tang, G.Y.: A Fast Two-Dimensional Median Filtering Algorithm, EEE TASSP 27(1), 13-18, Perreault and Hébert: Median filtering in constant time, IEEE TIP 16(9), ,
78 alpha-trimmed mean value filter The response is computed as the mean value of the P Q d middle values (after sorting) in the P Q neighbourhood around (x, y). Let Ω x,y be the set of pixel positions of the P Q d middle values after sorting, then the response is given by g[x, y] = 1 P Q d For d = 0 this becomes the mean value filter. For d = P Q 1 this becomes the median filter. (s,t) Ω x,y f[s, t]. 77
![mode filter (cursory reading) The response g[x, y] is equal to the most frequent pixel value in N (x, y).](/docs-images/77/75148032/images/79-0.jpg "The number of unique pixel values must be small compared to the number of pixels in the neighbourhood. Mostly used on segmented images containing only a few color levels to remove isolated pixels.")
79 mode filter (cursory reading) The response g[x, y] is equal to the most frequent pixel value in N (x, y). The number of unique pixel values must be small compared to the number of pixels in the neighbourhood. Mostly used on segmented images containing only a few color levels to remove isolated pixels. (a) Segmented image (b) After mode filtering Figure 14: Segmented image before and after mode filtering. 78
80 k-nearest-neighbour filter g[x, y] is the mean value of the K nearest pixel values in N (x, y). Here, nearest is in terms of absolute difference in value. Problem: K is constant for the entire image. Too small K: We remove too little noise. Too large K: We remove edges and corners. How to choose K for a L L neighbourhood, where L = 2S + 1. K = 1 : no effect. K L : preserves thin lines. K (S + 1) 2 : preserves corners. K (S + 1)L : preserves straight lines. 79
81 k-nearest-connected-neighbour filter The neighbourhood N (x, y) is the entire image. Thin lines, corners and edges are preserved if K is smaller or equal the number of pixels in the object. The implementation is something like this 1 # K nearest connected neighbours ( pseudocode ) 2 # f i s o r i g i n a l image, and g i s f i l t e r e d image, both of shape [M, N] 3 for x in range (M) : 4 for y in range (N) : 5 chosen_vals = [ ] 6 chosen_pixel = ( x, y ) 7 candidate_vals = [ ] 8 candidate_ pixels = [ ] 9 while len ( chosen_vals ) <= K : 10 candidate_ pixels. append_unique ( neighbourhood ( chosen_pixel ) ) 11 candidate_vals = f [ candidate_pixels ] 12 chosen_pixel = candidate_ pixels. pop ( argmin ( abs ( candidate_vals f [ x, y ] ) ) ) 13 chosen_vals. append ( f [ chosen_pixel ] ) 14 g [ x, y ] = mean( chosen_vals ) 15 80
82 minimal mean square error (mmse) filter For a P Q neighbourhood N (x, y) of (x, y), we can compute the sample mean µ(x, y) and variance 1 σ 2 (x, y) µ(x, y) = 1 P Q σ 2 (x, y) = 1 P Q = 1 P Q (s,t) N (x,y) (s,t) N (x,y) (s,t) N (x,y) f[s, t] (f[s, t] µ(x, y)) 2 f 2 [s, t] µ 2 (x, y) Assume that we have an estimate of the noise-variance σ 2 η Then, the MMSE-response at (x, y) is given as f[x, y] σ2 η σ g[x, y] = 2 (x,y) (f[x, y] µ(x, y)), σ2 η σ 2 (x, y) µ(x, y), ση 2 > σ 2 (x, y). In homogeneous areas, the response will be close to µ(x, y) Close to edges will σ 2 (x, y) be larger than σ 2 η, resulting in a response closer to f[x, y]. 1 For an unbiased estimator of the variance, the denominator is P Q 1. 81
83 sigma filter (cursory reading) The filter result g[x, y] is equal to the mean value of the pixels in the neighbourhood N (x, y) with values in the interval f[x, y] ± kσ. σ is a standard deviation estimated from homogeneous regions in f. k is a parameter with an appropriate problem-dependent value. S T s= S t= t g[x, y] = w xy[s, t]f[x + s, y + t] S T s= S t= t w, xy[s, t] where { 1, if f[x, y] f[x + s, y + t] kσ w xy [s, t] = 0, if not. 82
84 max-homogeneity filter An edge-preserving filter. Form multiple overlapping sub-neighbourhoods from the original neighbourhood. There exist many different ways to split the neighbourhood. Every sub-neighbourhood should contain the original centre pixel. The most homogeneous (e.g. with smallest variance) sub-neighbourhood contains the least edges. Computation: Compute the mean value and variance in each sub-neighbourhood. Set g[x, y] equal to the mean value of the sub-neighbourhood with lowes variance. 83
85 symmetrical nearest neighbour (snn) filter For every symmetrical pixel-pair in the neighbourhood of (x, y): Choose the pixel with the closest value to f[x, y] g[x, y] is then the mean value of the chosen pixel values and f[x, y]. The number of values that are meaned in a P Q neighbourhood is then (P Q 1)/
86 table of some low-pass filters Most important Mean value filter Gaussian filter Median filter Other examples covered today Alpha-trimmed mean value filter Mode filter K-nearest-neighbour filter K-nearest-connected-neighbour filter MMSE filter Sigma filter Max-homogeneity filter Symmetrical nearest neighbour filter Other examples not covered today Family of image guided adaptive filters (e.g. anisotropic diffusion filter) 85
87 summary Spatial filter: a neighbourhood and an operator. The operator defines the action taken on the input image. The neighbourhood defines which pixels the operator use. Convolution is linear spatial filtering Knowing how this works is essential in this course. Knowing how to implement this is also essential. Correlation can be used for template matching Low-pass filters can reduce noise, and there are many different low-pass filters. 86
88 Questions? 87
morphology on binary images
 morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
morphology on binary images Ole-Johan Skrede 10.05.2017 INF2310 - Digital Image Processing Department of Informatics The Faculty of Mathematics and Natural Sciences University of Oslo After original slides
Computer Vision I - Basics of Image Processing Part 1
 Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
Computer Vision I - Basics of Image Processing Part 1 Carsten Rother 28/10/2014 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing 28/10/2014 2
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 WRI C225 Lecture 04 130131 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Histogram Equalization Image Filtering Linear
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Part 3: Image Processing
 Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
Part 3: Image Processing Image Filtering and Segmentation Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 60 1 Image filtering 2 Median filtering 3 Mean filtering 4 Image segmentation
2D Image Processing INFORMATIK. Kaiserlautern University. DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
 2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
Filtering Images. Contents
 Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Image Processing and Data Visualization with MATLAB Filtering Images Hansrudi Noser June 8-9, 010 UZH, Multimedia and Robotics Summer School Noise Smoothing Filters Sigmoid Filters Gradient Filters Contents
Lecture: Edge Detection
 CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
CMPUT 299 Winter 2007 Lecture: Edge Detection Irene Cheng Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop -
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spring 2014 TTh 14:30-15:45 CBC C313 Lecture 03 Image Processing Basics 13/01/28 http://www.ee.unlv.edu/~b1morris/ecg782/
What will we learn? Neighborhood processing. Convolution and correlation. Neighborhood processing. Chapter 10 Neighborhood Processing
 What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
What will we learn? Lecture Slides ME 4060 Machine Vision and Vision-based Control Chapter 10 Neighborhood Processing By Dr. Debao Zhou 1 What is neighborhood processing and how does it differ from point
Part 3: Image Processing
 Part 3: Image Processing Moving Window Transform Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 62 1 Examples of linear / non-linear filtering 2 Moving window transform 3 Gaussian
Part 3: Image Processing Moving Window Transform Georgy Gimel farb COMPSCI 373 Computer Graphics and Image Processing 1 / 62 1 Examples of linear / non-linear filtering 2 Moving window transform 3 Gaussian
ECG782: Multidimensional Digital Signal Processing
 Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Professor Brendan Morris, SEB 3216, brendan.morris@unlv.edu ECG782: Multidimensional Digital Signal Processing Spatial Domain Filtering http://www.ee.unlv.edu/~b1morris/ecg782/ 2 Outline Background Intensity
Lecture 4: Image Processing
 Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Lecture 4: Image Processing Definitions Many graphics techniques that operate only on images Image processing: operations that take images as input, produce images as output In its most general form, an
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 2 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biomedical Image Analysis. Spatial Filtering
 Biomedical Image Analysis Contents: Spatial Filtering The mechanics of Spatial Filtering Smoothing and sharpening filters BMIA 15 V. Roth & P. Cattin 1 The Mechanics of Spatial Filtering Spatial filter:
Biomedical Image Analysis Contents: Spatial Filtering The mechanics of Spatial Filtering Smoothing and sharpening filters BMIA 15 V. Roth & P. Cattin 1 The Mechanics of Spatial Filtering Spatial filter:
Broad field that includes low-level operations as well as complex high-level algorithms
 Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image processing About Broad field that includes low-level operations as well as complex high-level algorithms Low-level image processing Computer vision Computational photography Several procedures and
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image, as opposed to the subjective process of image enhancement Enhancement uses heuristics to improve the image
Image Restoration and Reconstruction Image restoration Objective process to improve an image, as opposed to the subjective process of image enhancement Enhancement uses heuristics to improve the image
CS4442/9542b Artificial Intelligence II prof. Olga Veksler
 CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
CS4442/9542b Artificial Intelligence II prof. Olga Veksler Lecture 8 Computer Vision Introduction, Filtering Some slides from: D. Jacobs, D. Lowe, S. Seitz, A.Efros, X. Li, R. Fergus, J. Hayes, S. Lazebnik,
Computer Vision I - Algorithms and Applications: Basics of Image Processing
 Computer Vision I - Algorithms and Applications: Basics of Image Processing Carsten Rother 28/10/2013 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing
Computer Vision I - Algorithms and Applications: Basics of Image Processing Carsten Rother 28/10/2013 Computer Vision I: Basics of Image Processing Link to lectures Computer Vision I: Basics of Image Processing
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Lecture Image Enhancement and Spatial Filtering
 Lecture Image Enhancement and Spatial Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 29, 2005 Abstract Applications of
Lecture Image Enhancement and Spatial Filtering Harvey Rhody Chester F. Carlson Center for Imaging Science Rochester Institute of Technology rhody@cis.rit.edu September 29, 2005 Abstract Applications of
Image Processing
 Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Image Processing 159.731 Canny Edge Detection Report Syed Irfanullah, Azeezullah 00297844 Danh Anh Huynh 02136047 1 Canny Edge Detection INTRODUCTION Edges Edges characterize boundaries and are therefore
Introduction to Digital Image Processing
 Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Fall 2005 Image Enhancement in the Spatial Domain: Histograms, Arithmetic/Logic Operators, Basics of Spatial Filtering, Smoothing Spatial Filters Tuesday, February 7 2006, Overview (1): Before We Begin
Image Restoration and Reconstruction
 Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Image Restoration and Reconstruction Image restoration Objective process to improve an image Recover an image by using a priori knowledge of degradation phenomenon Exemplified by removal of blur by deblurring
Computer Vision 2. SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung. Computer Vision 2 Dr. Benjamin Guthier
 Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Computer Vision 2 SS 18 Dr. Benjamin Guthier Professur für Bildverarbeitung Computer Vision 2 Dr. Benjamin Guthier 1. IMAGE PROCESSING Computer Vision 2 Dr. Benjamin Guthier Content of this Chapter Non-linear
Image Enhancement: To improve the quality of images
 Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Image Enhancement: To improve the quality of images Examples: Noise reduction (to improve SNR or subjective quality) Change contrast, brightness, color etc. Image smoothing Image sharpening Modify image
Computer Vision I - Filtering and Feature detection
 Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Filtering and Feature detection Carsten Rother 30/10/2015 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Classification of image operations. Image enhancement (GW-Ch. 3) Point operations. Neighbourhood operation
 Point operations. Neighbourhood operation") Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Image enhancement (GW-Ch. 3) Classification of image operations Process of improving image quality so that the result is more suitable for a specific application. contrast stretching histogram processing
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Image Processing Lecture 10
 Image Restoration Image restoration attempts to reconstruct or recover an image that has been degraded by a degradation phenomenon. Thus, restoration techniques are oriented toward modeling the degradation
Image Restoration Image restoration attempts to reconstruct or recover an image that has been degraded by a degradation phenomenon. Thus, restoration techniques are oriented toward modeling the degradation
Lecture 2 Image Processing and Filtering
 Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Lecture 2 Image Processing and Filtering UW CSE vision faculty What s on our plate today? Image formation Image sampling and quantization Image interpolation Domain transformations Affine image transformations
Filtering Images in the Spatial Domain Chapter 3b G&W. Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah
 School of Computing University of Utah") Filtering Images in the Spatial Domain Chapter 3b G&W Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah 1 Overview Correlation and convolution Linear filtering Smoothing, kernels,
Filtering Images in the Spatial Domain Chapter 3b G&W Ross Whitaker (modified by Guido Gerig) School of Computing University of Utah 1 Overview Correlation and convolution Linear filtering Smoothing, kernels,
CPSC 425: Computer Vision
 1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 12, 2016 Topics:
1 / 55 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 55 Menu January 12, 2016 Topics:
Image Processing. Filtering. Slide 1
 Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Image Processing Filtering Slide 1 Preliminary Image generation Original Noise Image restoration Result Slide 2 Preliminary Classic application: denoising However: Denoising is much more than a simple
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Outlines. Medical Image Processing Using Transforms. 4. Transform in image space
 Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Medical Image Processing Using Transforms Hongmei Zhu, Ph.D Department of Mathematics & Statistics York University hmzhu@yorku.ca Outlines Image Quality Gray value transforms Histogram processing Transforms
Digital Image Processing
 Digital Image Processing Image Restoration and Reconstruction (Noise Removal) Christophoros Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science and Engineering 2 Image Restoration
Digital Image Processing Image Restoration and Reconstruction (Noise Removal) Christophoros Nikou cnikou@cs.uoi.gr University of Ioannina - Department of Computer Science and Engineering 2 Image Restoration
INTENSITY TRANSFORMATION AND SPATIAL FILTERING
 1 INTENSITY TRANSFORMATION AND SPATIAL FILTERING Lecture 3 Image Domains 2 Spatial domain Refers to the image plane itself Image processing methods are based and directly applied to image pixels Transform
1 INTENSITY TRANSFORMATION AND SPATIAL FILTERING Lecture 3 Image Domains 2 Spatial domain Refers to the image plane itself Image processing methods are based and directly applied to image pixels Transform
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
CoE4TN4 Image Processing. Chapter 5 Image Restoration and Reconstruction
 CoE4TN4 Image Processing Chapter 5 Image Restoration and Reconstruction Image Restoration Similar to image enhancement, the ultimate goal of restoration techniques is to improve an image Restoration: a
CoE4TN4 Image Processing Chapter 5 Image Restoration and Reconstruction Image Restoration Similar to image enhancement, the ultimate goal of restoration techniques is to improve an image Restoration: a
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Image restoration. Restoration: Enhancement:
 Image restoration Most images obtained by optical, electronic, or electro-optic means is likely to be degraded. The degradation can be due to camera misfocus, relative motion between camera and object,
Image restoration Most images obtained by optical, electronic, or electro-optic means is likely to be degraded. The degradation can be due to camera misfocus, relative motion between camera and object,
Filters. Advanced and Special Topics: Filters. Filters
 Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
Filters Advanced and Special Topics: Filters Dr. Edmund Lam Department of Electrical and Electronic Engineering The University of Hong Kong ELEC4245: Digital Image Processing (Second Semester, 2016 17)
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
EE 584 MACHINE VISION
 EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
EE 584 MACHINE VISION Binary Images Analysis Geometrical & Topological Properties Connectedness Binary Algorithms Morphology Binary Images Binary (two-valued; black/white) images gives better efficiency
Noise Model. Important Noise Probability Density Functions (Cont.) Important Noise Probability Density Functions
 Important Noise Probability Density Functions") Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
Others -- Noise Removal Techniques -- Edge Detection Techniques -- Geometric Operations -- Color Image Processing -- Color Spaces Xiaojun Qi Noise Model The principal sources of noise in digital images
3.4& Fundamentals& mechanics of spatial filtering(page 166) Spatial filter(mask) Filter coefficients Filter response
 Spatial filter(mask) Filter coefficients Filter response") Image enhancement in the spatial domain(3.4-3.7) SLIDE 1/21 3.4& 3.4.1 Fundamentals& mechanics of spatial filtering(page 166) Spatial filter(mask) Filter coefficients Filter response Example: 3 3mask Linear
Image enhancement in the spatial domain(3.4-3.7) SLIDE 1/21 3.4& 3.4.1 Fundamentals& mechanics of spatial filtering(page 166) Spatial filter(mask) Filter coefficients Filter response Example: 3 3mask Linear
PROCESS > SPATIAL FILTERS
 83 Spatial Filters There are 19 different spatial filters that can be applied to a data set. These are described in the table below. A filter can be applied to the entire volume or to selected objects
83 Spatial Filters There are 19 different spatial filters that can be applied to a data set. These are described in the table below. A filter can be applied to the entire volume or to selected objects
Topic 6 Representation and Description
 Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
Topic 6 Representation and Description Background Segmentation divides the image into regions Each region should be represented and described in a form suitable for further processing/decision-making Representation
x' = c 1 x + c 2 y + c 3 xy + c 4 y' = c 5 x + c 6 y + c 7 xy + c 8
 1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
1. Explain about gray level interpolation. The distortion correction equations yield non integer values for x' and y'. Because the distorted image g is digital, its pixel values are defined only at integer
Biomedical Image Analysis. Point, Edge and Line Detection
 Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Biomedical Image Analysis Point, Edge and Line Detection Contents: Point and line detection Advanced edge detection: Canny Local/regional edge processing Global processing: Hough transform BMIA 15 V. Roth
Basic Algorithms for Digital Image Analysis: a course
 Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Institute of Informatics Eötvös Loránd University Budapest, Hungary Basic Algorithms for Digital Image Analysis: a course Dmitrij Csetverikov with help of Attila Lerch, Judit Verestóy, Zoltán Megyesi,
Filtering and Edge Detection. Computer Vision I. CSE252A Lecture 10. Announcement
 Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Filtering and Edge Detection CSE252A Lecture 10 Announcement HW1graded, will be released later today HW2 assigned, due Wed. Nov. 7 1 Image formation: Color Channel k " $ $ # $ I r I g I b % " ' $ ' = (
Computer Vision I - Basics of Image Processing Part 2
 Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Computer Vision I - Basics of Image Processing Part 2 Carsten Rother 07/11/2014 Computer Vision I: Basics of Image Processing Roadmap: Basics of Digital Image Processing Computer Vision I: Basics of Image
Hom o om o or o phi p c Processing
 Homomorphic o o Processing Motivation: Image with a large dynamic range, e.g. natural scene on a bright sunny day, recorded on a medium with a small dynamic range, e.g. a film image contrast significantly
Homomorphic o o Processing Motivation: Image with a large dynamic range, e.g. natural scene on a bright sunny day, recorded on a medium with a small dynamic range, e.g. a film image contrast significantly
Digital Image Fundamentals
 Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Digital Image Fundamentals Image Quality Objective/ subjective Machine/human beings Mathematical and Probabilistic/ human intuition and perception 6 Structure of the Human Eye photoreceptor cells 75~50
Babu Madhav Institute of Information Technology Years Integrated M.Sc.(IT)(Semester - 7)
(Semester - 7)") 5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
5 Years Integrated M.Sc.(IT)(Semester - 7) 060010707 Digital Image Processing UNIT 1 Introduction to Image Processing Q: 1 Answer in short. 1. What is digital image? 1. Define pixel or picture element?
EECS490: Digital Image Processing. Lecture #17
 Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Lecture #17 Morphology & set operations on images Structuring elements Erosion and dilation Opening and closing Morphological image processing, boundary extraction, region filling Connectivity: convex
Computer Vision and Graphics (ee2031) Digital Image Processing I
 Digital Image Processing I") Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Local Image preprocessing (cont d)
") Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
Local Image preprocessing (cont d) 1 Outline - Edge detectors - Corner detectors - Reading: textbook 5.3.1-5.3.5 and 5.3.10 2 What are edges? Edges correspond to relevant features in the image. An edge
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE
 IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
IMAGE PROCESSING >FILTERS AND EDGE DETECTION FOR COLOR IMAGES UTRECHT UNIVERSITY RONALD POPPE OUTLINE Filters for color images Edge detection for color images Canny edge detection FILTERS FOR COLOR IMAGES
Morphological Image Processing
 Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
Morphological Image Processing Binary dilation and erosion" Set-theoretic interpretation" Opening, closing, morphological edge detectors" Hit-miss filter" Morphological filters for gray-level images" Cascading
EECS 556 Image Processing W 09. Image enhancement. Smoothing and noise removal Sharpening filters
 EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
EECS 556 Image Processing W 09 Image enhancement Smoothing and noise removal Sharpening filters What is image processing? Image processing is the application of 2D signal processing methods to images Image
Filtering and Enhancing Images
 KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
KECE471 Computer Vision Filtering and Enhancing Images Chang-Su Kim Chapter 5, Computer Vision by Shapiro and Stockman Note: Some figures and contents in the lecture notes of Dr. Stockman are used partly.
Image gradients and edges April 10 th, 2018
 Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April th, 28 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Digital Image Processing
 Digital Image Processing Jen-Hui Chuang Department of Computer Science National Chiao Tung University 2 3 Image Enhancement in the Spatial Domain 3.1 Background 3.4 Enhancement Using Arithmetic/Logic Operations
Digital Image Processing Jen-Hui Chuang Department of Computer Science National Chiao Tung University 2 3 Image Enhancement in the Spatial Domain 3.1 Background 3.4 Enhancement Using Arithmetic/Logic Operations
Image Processing. Traitement d images. Yuliya Tarabalka Tel.
 Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
Traitement d images Yuliya Tarabalka yuliya.tarabalka@hyperinet.eu yuliya.tarabalka@gipsa-lab.grenoble-inp.fr Tel. 04 76 82 62 68 Noise reduction Image restoration Restoration attempts to reconstruct an
CMPUT 206. Introduction to Digital Image Processing
 CMPUT 206 Introduction to Digital Image Processing Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop - How does
CMPUT 206 Introduction to Digital Image Processing Overview. What is a pixel in an image? 2. How does Photoshop, + human assistance, detect an edge in a picture/photograph? 3. Behind Photoshop - How does
CS4733 Class Notes, Computer Vision
 CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
CS4733 Class Notes, Computer Vision Sources for online computer vision tutorials and demos - http://www.dai.ed.ac.uk/hipr and Computer Vision resources online - http://www.dai.ed.ac.uk/cvonline Vision
EEM 463 Introduction to Image Processing. Week 3: Intensity Transformations
 EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
EEM 463 Introduction to Image Processing Week 3: Intensity Transformations Fall 2013 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Enhancement Domains Spatial
Obtaining Feature Correspondences
 Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Obtaining Feature Correspondences Neill Campbell May 9, 2008 A state-of-the-art system for finding objects in images has recently been developed by David Lowe. The algorithm is termed the Scale-Invariant
Image restoration. Lecture 14. Milan Gavrilovic Centre for Image Analysis Uppsala University
 Image restoration Lecture 14 Milan Gavrilovic milan@cb.uu.se Centre for Image Analysis Uppsala University Computer Assisted Image Analysis 2009-05-08 M. Gavrilovic (Uppsala University) L14 Image restoration
Image restoration Lecture 14 Milan Gavrilovic milan@cb.uu.se Centre for Image Analysis Uppsala University Computer Assisted Image Analysis 2009-05-08 M. Gavrilovic (Uppsala University) L14 Image restoration
Vivekananda. Collegee of Engineering & Technology. Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT.
 Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Vivekananda Collegee of Engineering & Technology Question and Answers on 10CS762 /10IS762 UNIT- 5 : IMAGE ENHANCEMENT Dept. Prepared by Harivinod N Assistant Professor, of Computer Science and Engineering,
Image gradients and edges April 11 th, 2017
 4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
4//27 Image gradients and edges April th, 27 Yong Jae Lee UC Davis PS due this Friday Announcements Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
SYDE 575: Introduction to Image Processing
 SYDE 575: Introduction to Image Processing Image Enhancement and Restoration in Spatial Domain Chapter 3 Spatial Filtering Recall 2D discrete convolution g[m, n] = f [ m, n] h[ m, n] = f [i, j ] h[ m i,
SYDE 575: Introduction to Image Processing Image Enhancement and Restoration in Spatial Domain Chapter 3 Spatial Filtering Recall 2D discrete convolution g[m, n] = f [ m, n] h[ m, n] = f [i, j ] h[ m i,
Image Enhancement in Spatial Domain (Chapter 3)
") Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
Image Enhancement in Spatial Domain (Chapter 3) Yun Q. Shi shi@njit.edu Fall 11 Mask/Neighborhood Processing ECE643 2 1 Point Processing ECE643 3 Image Negatives S = (L 1) - r (3.2-1) Point processing
Computer Vision. Recap: Smoothing with a Gaussian. Recap: Effect of σ on derivatives. Computer Science Tripos Part II. Dr Christopher Town
 Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Recap: Smoothing with a Gaussian Computer Vision Computer Science Tripos Part II Dr Christopher Town Recall: parameter σ is the scale / width / spread of the Gaussian kernel, and controls the amount of
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Digital Image Processing COSC 6380/4393 Lecture 6 Sept 6 th, 2017 Pranav Mantini Slides from Dr. Shishir K Shah and Frank (Qingzhong) Liu Today Review Logical Operations on Binary Images Blob Coloring
Segmentation and Grouping
 Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
Segmentation and Grouping How and what do we see? Fundamental Problems ' Focus of attention, or grouping ' What subsets of pixels do we consider as possible objects? ' All connected subsets? ' Representation
C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S. Image Operations II
 T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
T H E U N I V E R S I T Y of T E X A S H E A L T H S C I E N C E C E N T E R A T H O U S T O N S C H O O L of H E A L T H I N F O R M A T I O N S C I E N C E S Image Operations II For students of HI 5323
Artistic Stylization of Images and Video Part III Anisotropy and Filtering Eurographics 2011
 Artistic Stylization of Images and Video Part III Anisotropy and Filtering Eurographics 2011 Hasso-Plattner-Institut, University of Potsdam, Germany Image/Video Abstraction Stylized Augmented Reality for
Artistic Stylization of Images and Video Part III Anisotropy and Filtering Eurographics 2011 Hasso-Plattner-Institut, University of Potsdam, Germany Image/Video Abstraction Stylized Augmented Reality for
Image gradients and edges
 Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
Image gradients and edges April 7 th, 2015 Yong Jae Lee UC Davis Announcements PS0 due this Friday Questions? 2 Last time Image formation Linear filters and convolution useful for Image smoothing, removing
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Fundamentals of Digital Image Processing
 \L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
\L\.6 Gw.i Fundamentals of Digital Image Processing A Practical Approach with Examples in Matlab Chris Solomon School of Physical Sciences, University of Kent, Canterbury, UK Toby Breckon School of Engineering,
Intensity Transformations and Spatial Filtering
 77 Chapter 3 Intensity Transformations and Spatial Filtering Spatial domain refers to the image plane itself, and image processing methods in this category are based on direct manipulation of pixels in
77 Chapter 3 Intensity Transformations and Spatial Filtering Spatial domain refers to the image plane itself, and image processing methods in this category are based on direct manipulation of pixels in
Boundary descriptors. Representation REPRESENTATION & DESCRIPTION. Descriptors. Moore boundary tracking
 Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
Representation REPRESENTATION & DESCRIPTION After image segmentation the resulting collection of regions is usually represented and described in a form suitable for higher level processing. Most important
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam: INF 4300 / INF 9305 Digital image analysis Date: Thursday December 21, 2017 Exam hours: 09.00-13.00 (4 hours) Number of pages: 8 pages
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates
 COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
COMP30019 Graphics and Interaction Transformation geometry and homogeneous coordinates Department of Computer Science and Software Engineering The Lecture outline Introduction Vectors and matrices Translation
CSci 4968 and 6270 Computational Vision, Fall Semester, 2011 Lectures 2&3, Image Processing. Corners, boundaries, homogeneous regions, textures?
 1 Introduction CSci 4968 and 6270 Computational Vision, Fall Semester, 2011 Lectures 2&3, Image Processing How Do We Start Working with Images? Corners, boundaries, homogeneous regions, textures? How do
1 Introduction CSci 4968 and 6270 Computational Vision, Fall Semester, 2011 Lectures 2&3, Image Processing How Do We Start Working with Images? Corners, boundaries, homogeneous regions, textures? How do
Prime Time (Factors and Multiples)
") CONFIDENCE LEVEL: Prime Time Knowledge Map for 6 th Grade Math Prime Time (Factors and Multiples). A factor is a whole numbers that is multiplied by another whole number to get a product. (Ex: x 5 = ;
CONFIDENCE LEVEL: Prime Time Knowledge Map for 6 th Grade Math Prime Time (Factors and Multiples). A factor is a whole numbers that is multiplied by another whole number to get a product. (Ex: x 5 = ;
Digital filters. Remote Sensing (GRS-20306)
") Digital filters Remote Sensing (GRS-20306) Digital filters Purpose Operator Examples Properties (L&K pp. 494-499 and section 7.5) Digital filters and RS images Local operation by "mask" or "window" or
Digital filters Remote Sensing (GRS-20306) Digital filters Purpose Operator Examples Properties (L&K pp. 494-499 and section 7.5) Digital filters and RS images Local operation by "mask" or "window" or
UNIT - 5 IMAGE ENHANCEMENT IN SPATIAL DOMAIN
 UNIT - 5 IMAGE ENHANCEMENT IN SPATIAL DOMAIN Spatial domain methods Spatial domain refers to the image plane itself, and approaches in this category are based on direct manipulation of pixels in an image.
UNIT - 5 IMAGE ENHANCEMENT IN SPATIAL DOMAIN Spatial domain methods Spatial domain refers to the image plane itself, and approaches in this category are based on direct manipulation of pixels in an image.
Segmentation algorithm for monochrome images generally are based on one of two basic properties of gray level values: discontinuity and similarity.
 Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Chapter - 3 : IMAGE SEGMENTATION Segmentation subdivides an image into its constituent s parts or objects. The level to which this subdivision is carried depends on the problem being solved. That means
Points Lines Connected points X-Y Scatter. X-Y Matrix Star Plot Histogram Box Plot. Bar Group Bar Stacked H-Bar Grouped H-Bar Stacked
 Plotting Menu: QCExpert Plotting Module graphs offers various tools for visualization of uni- and multivariate data. Settings and options in different types of graphs allow for modifications and customizations
Plotting Menu: QCExpert Plotting Module graphs offers various tools for visualization of uni- and multivariate data. Settings and options in different types of graphs allow for modifications and customizations
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang
 Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
Lecture 6: Multimedia Information Retrieval Dr. Jian Zhang NICTA & CSE UNSW COMP9314 Advanced Database S1 2007 jzhang@cse.unsw.edu.au Reference Papers and Resources Papers: Colour spaces-perceptual, historical
EN1610 Image Understanding Lab # 3: Edges
 EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,
EN1610 Image Understanding Lab # 3: Edges The goal of this fourth lab is to ˆ Understanding what are edges, and different ways to detect them ˆ Understand different types of edge detectors - intensity,