Scaled representations
|
|
|
- Elaine Walton
- 5 years ago
- Views:
Transcription
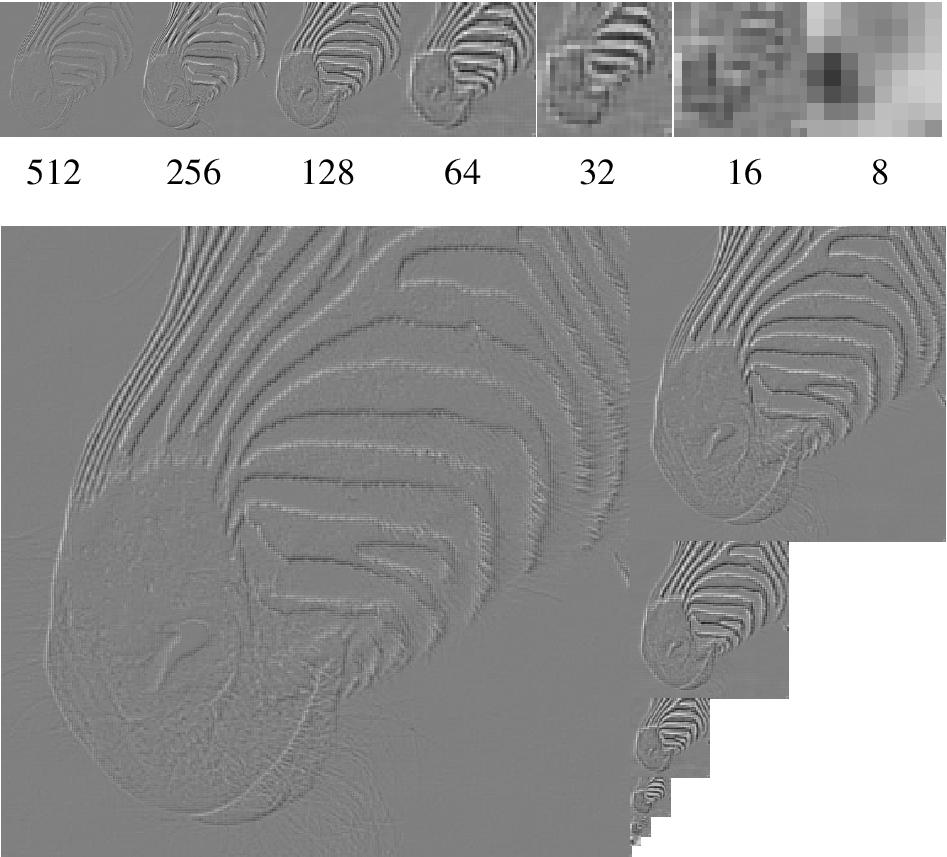
1 Scaled representations Big bars (resp. spots, hands, etc.) and little bars are both interesting Stripes and hairs, say Inefficient to detect big bars with big filters And there is superfluous detail in the filter kernel Alternative: Apply filters of fixed size to images of different sizes Typically, a collection of images whose edge length changes by a factor of 2 (or root 2) This is a pyramid (or Gaussian pyramid) by visual analogy A bar in the big images is a hair on the zebra s nose; in smaller images, a stripe; in the smallest, the animal s nose 1

2 Aliasing Can t shrink an image by taking every second pixel If we do, characteristic errors appear In the next few slides Typically, small phenomena look bigger; fast phenomena can look slower Common phenomenon Wagon wheels rolling the wrong way in movies Checkerboards misrepresented in ray tracing Striped shirts look funny on color television Resample the checkerboard by taking one sample at each circle. In the case of the top left board, new representation is reasonable. Top right also yields a reasonable representation. Bottom left is all black (dubious) and bottom right has checks that are too big. 2
3 Constructing a pyramid by taking every second pixel leads to layers that badly misrepresent the top layer Open questions What causes the tendency of differentiation to emphasize noise? In what precise respects are discrete images different from continuous images? How do we avoid aliasing? General thread: a language for fast changes The Fourier Transform 3
 F( g( x, y) )( u,v) = g x, y ÚÚ R 2")
4 The Fourier Transform Represent function on a new basis Think of functions as vectors, with many components We now apply a linear transformation to transform the basis dot product with each basis element In the expression, u and v select the basis element, so a function of x and y becomes a function of u and v basis elements have the form -i2p ux +vy e ( ) F( g( x, y) )( u,v) = g x, y ÚÚ R 2 ( )e ( ) dxdy -i2p ux +vy To get some sense of what basis elements look like, we plot a basis element --- or rather, its real part --- as a function of x,y for some fixed u, v. We get a function that is constant when (ux+vy) is constant. The magnitude of the vector (u, v) gives a frequency, and its direction gives an orientation. The function is a sinusoid with this frequency along the direction, and constant perpendicular to the direction. 4


5 Here u and v are larger than in the previous slide. And larger still... 5

6 Phase and Magnitude Fourier transform of a real function is complex difficult to plot, visualize instead, we can think of the phase and magnitude of the transform Phase is the phase of the complex transform Magnitude is the magnitude of the complex transform Curious fact all natural images have about the same magnitude transform hence, phase seems to matter, but magnitude largely doesn t Demonstration Take two pictures, swap the phase transforms, compute the inverse - what does the result look like? 6


7 This is the magnitude transform of the cheetah pic This is the phase transform of the cheetah pic 7

8 This is the magnitude transform of the zebra pic 8


9 This is the phase transform of the zebra pic Reconstruction with zebra phase, cheetah magnitude 9

10 Reconstruction with cheetah phase, zebra magnitude Various Fourier Transform Pairs Important facts The Fourier transform is linear There is an inverse FT if you scale the function s argument, then the transform s argument scales the other way. This makes sense --- if you multiply a function s argument by a number that is larger than one, you are stretching the function, so that high frequencies go to low frequencies The FT of a Gaussian is a Gaussian. The convolution theorem The Fourier transform of the convolution of two functions is the product of their Fourier transforms The inverse Fourier transform of the product of two Fourier transforms is the convolution of the two inverse Fourier transforms There s a table in the book. 10
11 Sampling in 1D takes a continuous function and replaces it with a vector of values, consisting of the function s values at a set of sample points. We ll assume that these sample points are on a regular grid, and can place one at each integer for convenience. Sampling in 2D does the same thing, only in 2D. We ll assume that these sample points are on a regular grid, and can place one at each integer point for convenience. 11
12 A continuous model for a sampled function We want to be able to approximate integrals sensibly Leads to the delta function model on right Sample 2D f (x, y) ( ) =   f (x, y)d (x - i, y - j) i=- i=- = f (x, y) d (x - i, y - j)   i=- i=- The Fourier transform of a sampled signal Ê F( Sample 2D ( f (x, y) )) = FÁ f (x, y)  d(x - i, y - j) Ë Â i=- i=- Ê ˆ = F( f (x, y) )**FÁ   d(x - i, y - j) Ë i=- i=- = F u - i, v - j   i=- j=- ( ) ˆ 12
13 13

14 Smoothing as low-pass filtering The message of the FT is that high frequencies lead to trouble with sampling. Solution: suppress high frequencies before sampling multiply the FT of the signal with something that suppresses high frequencies or convolve with a low-pass filter A filter whose FT is a box is bad, because the filter kernel has infinite support Common solution: use a Gaussian multiplying FT by Gaussian is equivalent to convolving image with Gaussian. Sampling without smoothing. Top row shows the images, sampled at every second pixel to get the next; bottom row shows the magnitude spectrum of these images. 14


15 Sampling with smoothing. Top row shows the images. We get the next image by smoothing the image with a Gaussian with sigma 1 pixel, then sampling at every second pixel to get the next; bottom row shows the magnitude spectrum of these images. Sampling with smoothing. Top row shows the images. We get the next image by smoothing the image with a Gaussian with sigma 1.4 pixels, then sampling at every second pixel to get the next; bottom row shows the magnitude spectrum of these images. 15
16 Applications of scaled representations Search for correspondence look at coarse scales, then refine with finer scales Edge tracking a good edge at a fine scale has parents at a coarser scale Control of detail and computational cost in matching e.g. finding stripes terribly important in texture representation The Gaussian pyramid Smooth with gaussians, because a gaussian*gaussian=another gaussian Synthesis smooth and sample Analysis take the top image Gaussians are low pass filters, so representation is redundant 16
17 Texture Key issue: representing texture Texture based matching little is known Texture segmentation key issue: representing texture Texture synthesis useful; also gives some insight into quality of representation Shape from texture cover superficially 17

18 Representing textures Textures are made up of quite stylized subelements, repeated in meaningful ways Representation: find the subelements, and represent their statistics But what are the subelements, and how do we find them? recall normalized correlation find subelements by applying filters, looking at the magnitude of the response What filters? experience suggests spots and oriented bars at a variety of different scales details probably don t matter What statistics? within reason, the more the merrier. At least, mean and standard deviation better, various conditional histograms. 18

19 19
20 20
21 Gabor filters at different scales and spatial frequencies top row shows anti-symmetric (or odd) filters, bottom row the symmetric (or even) filters. The Laplacian Pyramid Synthesis preserve difference between upsampled Gaussian pyramid level and Gaussian pyramid level band pass filter - each level represents spatial frequencies (largely) unrepresented at other levels Analysis reconstruct Gaussian pyramid, take top layer 21
22 22

23 Oriented pyramids Laplacian pyramid is orientation independent Apply an oriented filter to determine orientations at each layer by clever filter design, we can simplify synthesis this represents image information at a particular scale and orientation 23

24 Reprinted from Shiftable MultiScale Transforms, by Simoncelli et al., IEEE Transactions on Information Theory, 1992, copyright 1992, IEEE Analysis 24
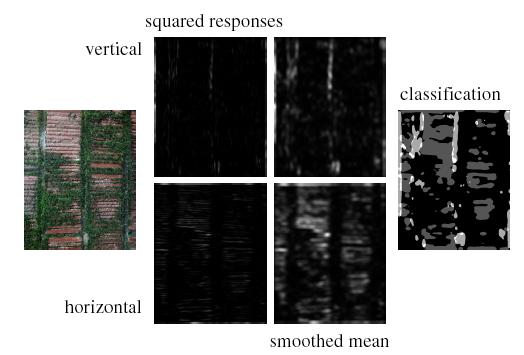
25 synthesis Final texture representation Form an oriented pyramid (or equivalent set of responses to filters at different scales and orientations). Square the output Take statistics of responses e.g. mean of each filter output (are there lots of spots) std of each filter output mean of one scale conditioned on other scale having a particular range of values (e.g. are the spots in straight rows?) 25


26 Texture synthesis Use image as a source of probability model Choose pixel values by matching neighborhood, then filling in Matching process look at pixel differences count only synthesized pixels Figure from Texture Synthesis by Non-parametric Sampling, A. Efros and T.K. Leung, Proc. Int. Conf. Computer Vision, 1999 copyright 1999, IEEE 26
27 Variations Texture synthesis at multiple scales Texture synthesis on surfaces Texture synthesis by tiles Analogous texture synthesis 27
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
CS 534: Computer Vision Texture Spring 2004 Ahmed Elgammal Dept of Computer Science CS 534 Ahmed Elgammal Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrecis for
CS 534: Computer Vision Texture
 CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
CS 534: Computer Vision Texture Ahmed Elgammal Dept of Computer Science CS 534 Texture - 1 Outlines Finding templates by convolution What is Texture Co-occurrence matrices for texture Spatial Filtering
Computer Vision: 4. Filtering. By I-Chen Lin Dept. of CS, National Chiao Tung University
 Computer Vision: 4. Filtering By I-Chen Lin Dept. of CS, National Chiao Tung University Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth and Jean Ponce,
Computer Vision: 4. Filtering By I-Chen Lin Dept. of CS, National Chiao Tung University Outline Impulse response and convolution. Linear filter and image pyramid. Textbook: David A. Forsyth and Jean Ponce,
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition)
") Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
Frequency analysis, pyramids, texture analysis, applications (face detection, category recognition) Outline Measuring frequencies in images: Definitions, properties Sampling issues Relation with Gaussian
FOURIER TRANSFORM GABOR FILTERS. and some textons
 FOURIER TRANSFORM GABOR FILTERS and some textons Thank you for the slides. They come mostly from the following sources Alexei Efros CMU Martial Hebert CMU Image sub-sampling 1/8 1/4 Throw away every other
FOURIER TRANSFORM GABOR FILTERS and some textons Thank you for the slides. They come mostly from the following sources Alexei Efros CMU Martial Hebert CMU Image sub-sampling 1/8 1/4 Throw away every other
Texture. Texture. 2) Synthesis. Objectives: 1) Discrimination/Analysis
 Synthesis. Objectives: 1) Discrimination/Analysis") Texture Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Texture Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Image pyramids and their applications Bill Freeman and Fredo Durand Feb. 28, 2006
 Image pyramids and their applications 6.882 Bill Freeman and Fredo Durand Feb. 28, 2006 Image pyramids Gaussian Laplacian Wavelet/QMF Steerable pyramid http://www-bcs.mit.edu/people/adelson/pub_pdfs/pyramid83.pdf
Image pyramids and their applications 6.882 Bill Freeman and Fredo Durand Feb. 28, 2006 Image pyramids Gaussian Laplacian Wavelet/QMF Steerable pyramid http://www-bcs.mit.edu/people/adelson/pub_pdfs/pyramid83.pdf
Filtering, scale, orientation, localization, and texture. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Filtering, scale, orientation, localization, and texture Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Beyond edges we have talked a lot about edges while they are important, it
Filtering, scale, orientation, localization, and texture Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Beyond edges we have talked a lot about edges while they are important, it
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
Texture. D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC)
") Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Texture. D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously
 Previously") Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Previously Edges, contours, feature points, patches (templates) Color features Useful for matching, recognizing
convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection
 COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
COS 429: COMPUTER VISON Linear Filters and Edge Detection convolution shift invariant linear system Fourier Transform Aliasing and sampling scale representation edge detection corner detection Reading:
Applications of Image Filters
 02/04/0 Applications of Image Filters Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Review: Image filtering g[, ] f [.,.] h[.,.] 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 90
02/04/0 Applications of Image Filters Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Review: Image filtering g[, ] f [.,.] h[.,.] 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 90
Texture. D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Texture
 Texture") Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Texture Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Texture D. Forsythe and J. Ponce Computer Vision modern approach Chapter 9 (Slides D. Lowe, UBC) Texture Key issue: How do we represent texture? Topics: Texture segmentation Texture-based matching Texture
Analysis and Synthesis of Texture
 Analysis and Synthesis of Texture CMPE 264: Image Analysis and Computer Vision Spring 02, Hai Tao 31/5/02 Extracting image structure by filter banks Q Represent image textures using the responses of a
Analysis and Synthesis of Texture CMPE 264: Image Analysis and Computer Vision Spring 02, Hai Tao 31/5/02 Extracting image structure by filter banks Q Represent image textures using the responses of a
Schedule for Rest of Semester
 Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Schedule for Rest of Semester Date Lecture Topic 11/20 24 Texture 11/27 25 Review of Statistics & Linear Algebra, Eigenvectors 11/29 26 Eigenvector expansions, Pattern Recognition 12/4 27 Cameras & calibration
Final Exam Schedule. Final exam has been scheduled. 12:30 pm 3:00 pm, May 7. Location: INNOVA It will cover all the topics discussed in class
 Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Final Exam Schedule Final exam has been scheduled 12:30 pm 3:00 pm, May 7 Location: INNOVA 1400 It will cover all the topics discussed in class One page double-sided cheat sheet is allowed A calculator
Texture. Outline. Image representations: spatial and frequency Fourier transform Frequency filtering Oriented pyramids Texture representation
 Texture Outline Image representations: spatial and frequency Fourier transform Frequency filtering Oriented pyramids Texture representation 1 Image Representation The standard basis for images is the set
Texture Outline Image representations: spatial and frequency Fourier transform Frequency filtering Oriented pyramids Texture representation 1 Image Representation The standard basis for images is the set
Lecture 2: 2D Fourier transforms and applications
 Lecture 2: 2D Fourier transforms and applications B14 Image Analysis Michaelmas 2017 Dr. M. Fallon Fourier transforms and spatial frequencies in 2D Definition and meaning The Convolution Theorem Applications
Lecture 2: 2D Fourier transforms and applications B14 Image Analysis Michaelmas 2017 Dr. M. Fallon Fourier transforms and spatial frequencies in 2D Definition and meaning The Convolution Theorem Applications
Texture and Other Uses of Filters
 CS 1699: Intro to Computer Vision Texture and Other Uses of Filters Prof. Adriana Kovashka University of Pittsburgh September 10, 2015 Slides from Kristen Grauman (12-52) and Derek Hoiem (54-83) Plan for
CS 1699: Intro to Computer Vision Texture and Other Uses of Filters Prof. Adriana Kovashka University of Pittsburgh September 10, 2015 Slides from Kristen Grauman (12-52) and Derek Hoiem (54-83) Plan for
Multiresolution Image Processing
 Multiresolution Image Processing 2 Processing and Analysis of Images at Multiple Scales What is Multiscale Decompostion? Why use Multiscale Processing? How to use Multiscale Processing? Related Concepts:
Multiresolution Image Processing 2 Processing and Analysis of Images at Multiple Scales What is Multiscale Decompostion? Why use Multiscale Processing? How to use Multiscale Processing? Related Concepts:
Median filter. Non-linear filtering example. Degraded image. Radius 1 median filter. Today
 Today Non-linear filtering example Median filter Replace each pixel by the median over N pixels (5 pixels, for these examples). Generalizes to rank order filters. In: In: 5-pixel neighborhood Out: Out:
Today Non-linear filtering example Median filter Replace each pixel by the median over N pixels (5 pixels, for these examples). Generalizes to rank order filters. In: In: 5-pixel neighborhood Out: Out:
Non-linear filtering example
 Today Non-linear filtering example Median filter Replace each pixel by the median over N pixels (5 pixels, for these examples). Generalizes to rank order filters. In: In: 5-pixel neighborhood Out: Out:
Today Non-linear filtering example Median filter Replace each pixel by the median over N pixels (5 pixels, for these examples). Generalizes to rank order filters. In: In: 5-pixel neighborhood Out: Out:
Texture. Announcements. 2) Synthesis. Issues: 1) Discrimination/Analysis
 Synthesis. Issues: 1) Discrimination/Analysis") Announcements For future problems sets: email matlab code by 11am, due date (same as deadline to hand in hardcopy). Today s reading: Chapter 9, except 9.4. Texture Edge detectors find differences in overall
Announcements For future problems sets: email matlab code by 11am, due date (same as deadline to hand in hardcopy). Today s reading: Chapter 9, except 9.4. Texture Edge detectors find differences in overall
Texture Representation + Image Pyramids
 CS 1674: Intro to Computer Vision Texture Representation + Image Pyramids Prof. Adriana Kovashka University of Pittsburgh September 14, 2016 Reminders/Announcements HW2P due tonight, 11:59pm HW3W, HW3P
CS 1674: Intro to Computer Vision Texture Representation + Image Pyramids Prof. Adriana Kovashka University of Pittsburgh September 14, 2016 Reminders/Announcements HW2P due tonight, 11:59pm HW3W, HW3P
EEM 561 Machine Vision. Week 3: Fourier Transform and Image Pyramids
 EEM 561 Machine Vision Week 3: Fourier Transform and Image Pyramids Spring 2015 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Linear Image Transformations In
EEM 561 Machine Vision Week 3: Fourier Transform and Image Pyramids Spring 2015 Instructor: Hatice Çınar Akakın, Ph.D. haticecinarakakin@anadolu.edu.tr Anadolu University Linear Image Transformations In
Today: non-linear filters, and uses for the filters and representations from last time. Review pyramid representations Non-linear filtering Textures
 1 Today: non-linear filters, and uses for the filters and representations from last time Review pyramid representations Non-linear filtering Textures 2 Reading Related to today s lecture: Chapter 9, Forsyth&Ponce..
1 Today: non-linear filters, and uses for the filters and representations from last time Review pyramid representations Non-linear filtering Textures 2 Reading Related to today s lecture: Chapter 9, Forsyth&Ponce..
288 Texture Chapter 11
 Chapter 11 TEXTURE Texture is a phenomenon that is widespread, easy to recognise and hard to define. Typically, whether an effect is referred to as texture or not depends on the scale at which it is viewed.
Chapter 11 TEXTURE Texture is a phenomenon that is widespread, easy to recognise and hard to define. Typically, whether an effect is referred to as texture or not depends on the scale at which it is viewed.
Filters and Pyramids. CSC320: Introduction to Visual Computing Michael Guerzhoy. Many slides from Steve Marschner, Alexei Efros
 Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Filters and Pyramids Wassily Kandinsky, "Accent in Pink" Many slides from Steve Marschner, Alexei Efros CSC320: Introduction to Visual Computing Michael Guerzhoy Moving Average In 2D What are the weights
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Edge Detection (with a sidelight introduction to linear, associative operators). Images
. Images") Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
Images (we will, eventually, come back to imaging geometry. But, now that we know how images come from the world, we will examine operations on images). Edge Detection (with a sidelight introduction to
CPSC 425: Computer Vision
 1 / 92 CPSC 425: Computer Vision Instructor: Jim Little little@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2016/2017 Term 2 2 / 92 Menu February 14, 2017 Topics:
1 / 92 CPSC 425: Computer Vision Instructor: Jim Little little@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2016/2017 Term 2 2 / 92 Menu February 14, 2017 Topics:
Filtering Applications & Edge Detection. GV12/3072 Image Processing.
 Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
Filtering Applications & Edge Detection GV12/3072 1 Outline Sampling & Reconstruction Revisited Anti-Aliasing Edges Edge detection Simple edge detector Canny edge detector Performance analysis Hough Transform
Segmentation. (template) matching
 matching") Segmentation. (template) matching 1 Announcements Midterm March 3 2010, in class Duration: 45 min Weight: 20% of final course mark Closed book, closed notes Calculator allowed Practice midterm posted.
Segmentation. (template) matching 1 Announcements Midterm March 3 2010, in class Duration: 45 min Weight: 20% of final course mark Closed book, closed notes Calculator allowed Practice midterm posted.
Advanced Computer Graphics. Aliasing. Matthias Teschner. Computer Science Department University of Freiburg
 Advanced Computer Graphics Aliasing Matthias Teschner Computer Science Department University of Freiburg Outline motivation Fourier analysis filtering sampling reconstruction / aliasing antialiasing University
Advanced Computer Graphics Aliasing Matthias Teschner Computer Science Department University of Freiburg Outline motivation Fourier analysis filtering sampling reconstruction / aliasing antialiasing University
Lecture 6: Edge Detection
 #1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
#1 Lecture 6: Edge Detection Saad J Bedros sbedros@umn.edu Review From Last Lecture Options for Image Representation Introduced the concept of different representation or transformation Fourier Transform
Edges, interpolation, templates. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Edge detection edge detection has many applications in image processing an edge detector implements
Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Edge detection edge detection has many applications in image processing an edge detector implements
CS 4495 Computer Vision. Linear Filtering 2: Templates, Edges. Aaron Bobick. School of Interactive Computing. Templates/Edges
 CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
CS 4495 Computer Vision Linear Filtering 2: Templates, Edges Aaron Bobick School of Interactive Computing Last time: Convolution Convolution: Flip the filter in both dimensions (right to left, bottom to
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University. Computer Vision: 6. Texture
 I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 6. Texture Objective Key issue: How do we represent texture? Topics: Texture analysis Texture synthesis Shape
I Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University Computer Vision: 6. Texture Objective Key issue: How do we represent texture? Topics: Texture analysis Texture synthesis Shape
2D Image Processing INFORMATIK. Kaiserlautern University. DFKI Deutsches Forschungszentrum für Künstliche Intelligenz
 2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
2D Image Processing - Filtering Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 What is image filtering?
Fourier analysis and sampling theory
 Reading Required: Shirley, Ch. 9 Recommended: Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali, Reconstruction
Reading Required: Shirley, Ch. 9 Recommended: Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali, Reconstruction
Announcements. Image Matching! Source & Destination Images. Image Transformation 2/ 3/ 16. Compare a big image to a small image
 2/3/ Announcements PA is due in week Image atching! Leave time to learn OpenCV Think of & implement something creative CS 50 Lecture #5 February 3 rd, 20 2/ 3/ 2 Compare a big image to a small image So
2/3/ Announcements PA is due in week Image atching! Leave time to learn OpenCV Think of & implement something creative CS 50 Lecture #5 February 3 rd, 20 2/ 3/ 2 Compare a big image to a small image So
Aliasing. Can t draw smooth lines on discrete raster device get staircased lines ( jaggies ):
:") (Anti)Aliasing and Image Manipulation for (y = 0; y < Size; y++) { for (x = 0; x < Size; x++) { Image[x][y] = 7 + 8 * sin((sqr(x Size) + SQR(y Size)) / 3.0); } } // Size = Size / ; Aliasing Can t draw
(Anti)Aliasing and Image Manipulation for (y = 0; y < Size; y++) { for (x = 0; x < Size; x++) { Image[x][y] = 7 + 8 * sin((sqr(x Size) + SQR(y Size)) / 3.0); } } // Size = Size / ; Aliasing Can t draw
CS334: Digital Imaging and Multimedia Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
CS334: Digital Imaging and Multimedia Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators From Edges
Sampling, Aliasing, & Mipmaps
 Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere Sampling sensitive to choice of samples less sensitive to choice of samples
Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere Sampling sensitive to choice of samples less sensitive to choice of samples
Digital Image Processing. Prof. P. K. Biswas. Department of Electronic & Electrical Communication Engineering
 Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Digital Image Processing Prof. P. K. Biswas Department of Electronic & Electrical Communication Engineering Indian Institute of Technology, Kharagpur Lecture - 21 Image Enhancement Frequency Domain Processing
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
CS534: Introduction to Computer Vision Edges and Contours. Ahmed Elgammal Dept. of Computer Science Rutgers University
 CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
CS534: Introduction to Computer Vision Edges and Contours Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines What makes an edge? Gradient-based edge detection Edge Operators Laplacian
Computer Vision I. Announcements. Fourier Tansform. Efficient Implementation. Edge and Corner Detection. CSE252A Lecture 13.
 Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Announcements Edge and Corner Detection HW3 assigned CSE252A Lecture 13 Efficient Implementation Both, the Box filter and the Gaussian filter are separable: First convolve each row of input image I with
Sampling and Reconstruction. Most slides from Steve Marschner
 Sampling and Reconstruction Most slides from Steve Marschner 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Sampling and Reconstruction Sampled representations How to store and compute
Sampling and Reconstruction Most slides from Steve Marschner 15-463: Computational Photography Alexei Efros, CMU, Fall 2008 Sampling and Reconstruction Sampled representations How to store and compute
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies"
 ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
ME/CS 132: Introduction to Vision-based Robot Navigation! Low-level Image Processing" Larry Matthies" lhm@jpl.nasa.gov, 818-354-3722" Announcements" First homework grading is done! Second homework is due
Texture. This isn t described in Trucco and Verri Parts are described in:
 Texture This isn t described in Trucco and Verri Parts are described in: Computer Vision, a Modern Approach by Forsyth and Ponce Texture Synthesis by Non-parametric Sampling, by Efros and Leung, Int. Conf.
Texture This isn t described in Trucco and Verri Parts are described in: Computer Vision, a Modern Approach by Forsyth and Ponce Texture Synthesis by Non-parametric Sampling, by Efros and Leung, Int. Conf.
Image Processing and Analysis
 Image Processing and Analysis 3 stages: Image Restoration - correcting errors and distortion. Warping and correcting systematic distortion related to viewing geometry Correcting "drop outs", striping and
Image Processing and Analysis 3 stages: Image Restoration - correcting errors and distortion. Warping and correcting systematic distortion related to viewing geometry Correcting "drop outs", striping and
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Reading. 2. Fourier analysis and sampling theory. Required: Watt, Section 14.1 Recommended:
 Reading Required: Watt, Section 14.1 Recommended: 2. Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali,
Reading Required: Watt, Section 14.1 Recommended: 2. Fourier analysis and sampling theory Ron Bracewell, The Fourier Transform and Its Applications, McGraw-Hill. Don P. Mitchell and Arun N. Netravali,
Sampling, Aliasing, & Mipmaps
 Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere What is a Pixel? Sampling & Reconstruction Filters in Computer Graphics
Sampling, Aliasing, & Mipmaps Last Time? Monte-Carlo Integration Importance Sampling Ray Tracing vs. Path Tracing source hemisphere What is a Pixel? Sampling & Reconstruction Filters in Computer Graphics
CS1114 Section 8: The Fourier Transform March 13th, 2013
 CS1114 Section 8: The Fourier Transform March 13th, 2013 http://xkcd.com/26 Today you will learn about an extremely useful tool in image processing called the Fourier transform, and along the way get more
CS1114 Section 8: The Fourier Transform March 13th, 2013 http://xkcd.com/26 Today you will learn about an extremely useful tool in image processing called the Fourier transform, and along the way get more
Templates, Image Pyramids, and Filter Banks
 Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Templates, Image Pyramids, and Filter Banks Computer Vision James Hays, Brown Slides: Hoiem and others Reminder Project due Friday Fourier Bases Teases away fast vs. slow changes in the image. This change
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong)
") Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Biometrics Technology: Image Processing & Pattern Recognition (by Dr. Dickson Tong) References: [1] http://homepages.inf.ed.ac.uk/rbf/hipr2/index.htm [2] http://www.cs.wisc.edu/~dyer/cs540/notes/vision.html
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Lecture 03 Computer Vision
 Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection Lecture 3 Computer Vision Suggested readings Chapter 5 Linda G. Shapiro and George Stockman, Computer Vision, Upper Saddle River, NJ, Prentice Hall,. Chapter David A. Forsyth and Jean Ponce,
Edge Detection. Today s reading. Cipolla & Gee on edge detection (available online) From Sandlot Science
 From Sandlot Science") Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Edge Detection From Sandlot Science Today s reading Cipolla & Gee on edge detection (available online) Project 1a assigned last Friday due this Friday Last time: Cross-correlation Let be the image, be
Digital Image Processing COSC 6380/4393
 Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Digital Image Processing COSC 6380/4393 Lecture 21 Nov 16 th, 2017 Pranav Mantini Ack: Shah. M Image Processing Geometric Transformation Point Operations Filtering (spatial, Frequency) Input Restoration/
Theoretically Perfect Sensor
 Sampling 1/60 Sampling The ray tracer samples the geometry, only gathering information from the parts of the world that interact with a finite number of rays In contrast, a scanline renderer can push all
Sampling 1/60 Sampling The ray tracer samples the geometry, only gathering information from the parts of the world that interact with a finite number of rays In contrast, a scanline renderer can push all
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Sampling, Aliasing, & Mipmaps
 Last Time? Sampling, Aliasing, & Mipmaps 2D Texture Mapping Perspective Correct Interpolation Common Texture Coordinate Projections Bump Mapping Displacement Mapping Environment Mapping Texture Maps for
Last Time? Sampling, Aliasing, & Mipmaps 2D Texture Mapping Perspective Correct Interpolation Common Texture Coordinate Projections Bump Mapping Displacement Mapping Environment Mapping Texture Maps for
Pop Quiz 1 [10 mins]
![Pop Quiz 1 [10 mins]](/thumbs/77/76612064.jpg "Pop Quiz 1 [10 mins]") Pop Quiz 1 [10 mins] 1. An audio signal makes 250 cycles in its span (or has a frequency of 250Hz). How many samples do you need, at a minimum, to sample it correctly? [1] 2. If the number of bits is reduced,
Pop Quiz 1 [10 mins] 1. An audio signal makes 250 cycles in its span (or has a frequency of 250Hz). How many samples do you need, at a minimum, to sample it correctly? [1] 2. If the number of bits is reduced,
SECTION 5 IMAGE PROCESSING 2
 SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
SECTION 5 IMAGE PROCESSING 2 5.1 Resampling 3 5.1.1 Image Interpolation Comparison 3 5.2 Convolution 3 5.3 Smoothing Filters 3 5.3.1 Mean Filter 3 5.3.2 Median Filter 4 5.3.3 Pseudomedian Filter 6 5.3.4
Computer Vision and Graphics (ee2031) Digital Image Processing I
 Digital Image Processing I") Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Computer Vision and Graphics (ee203) Digital Image Processing I Dr John Collomosse J.Collomosse@surrey.ac.uk Centre for Vision, Speech and Signal Processing University of Surrey Learning Outcomes After
Lecture 4: Spatial Domain Transformations
 # Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
# Lecture 4: Spatial Domain Transformations Saad J Bedros sbedros@umn.edu Reminder 2 nd Quiz on the manipulator Part is this Fri, April 7 205, :5 AM to :0 PM Open Book, Open Notes, Focus on the material
Computer Vision. Fourier Transform. 20 January Copyright by NHL Hogeschool and Van de Loosdrecht Machine Vision BV All rights reserved
 Van de Loosdrecht Machine Vision Computer Vision Fourier Transform 20 January 2017 Copyright 2001 2017 by NHL Hogeschool and Van de Loosdrecht Machine Vision BV All rights reserved j.van.de.loosdrecht@nhl.nl,
Van de Loosdrecht Machine Vision Computer Vision Fourier Transform 20 January 2017 Copyright 2001 2017 by NHL Hogeschool and Van de Loosdrecht Machine Vision BV All rights reserved j.van.de.loosdrecht@nhl.nl,
Texture and Shape for Image Retrieval Multimedia Analysis and Indexing
 Texture and Shape for Image Retrieval Multimedia Analysis and Indexing Winston H. Hsu National Taiwan University, Taipei Office: R512, CSIE Building Communication and Multimedia Lab () http://www.csie.ntu.edu.tw/~winston
Texture and Shape for Image Retrieval Multimedia Analysis and Indexing Winston H. Hsu National Taiwan University, Taipei Office: R512, CSIE Building Communication and Multimedia Lab () http://www.csie.ntu.edu.tw/~winston
Aliasing and Antialiasing. ITCS 4120/ Aliasing and Antialiasing
 Aliasing and Antialiasing ITCS 4120/5120 1 Aliasing and Antialiasing What is Aliasing? Errors and Artifacts arising during rendering, due to the conversion from a continuously defined illumination field
Aliasing and Antialiasing ITCS 4120/5120 1 Aliasing and Antialiasing What is Aliasing? Errors and Artifacts arising during rendering, due to the conversion from a continuously defined illumination field
CS143 Introduction to Computer Vision Homework assignment 1.
 CS143 Introduction to Computer Vision Homework assignment 1. Due: Problem 1 & 2 September 23 before Class Assignment 1 is worth 15% of your total grade. It is graded out of a total of 100 (plus 15 possible
CS143 Introduction to Computer Vision Homework assignment 1. Due: Problem 1 & 2 September 23 before Class Assignment 1 is worth 15% of your total grade. It is graded out of a total of 100 (plus 15 possible
Chapter 3: Intensity Transformations and Spatial Filtering
 Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Chapter 3: Intensity Transformations and Spatial Filtering 3.1 Background 3.2 Some basic intensity transformation functions 3.3 Histogram processing 3.4 Fundamentals of spatial filtering 3.5 Smoothing
Image Filtering, Warping and Sampling
 Image Filtering, Warping and Sampling Connelly Barnes CS 4810 University of Virginia Acknowledgement: slides by Jason Lawrence, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David
Image Filtering, Warping and Sampling Connelly Barnes CS 4810 University of Virginia Acknowledgement: slides by Jason Lawrence, Misha Kazhdan, Allison Klein, Tom Funkhouser, Adam Finkelstein and David
Image processing. Reading. What is an image? Brian Curless CSE 457 Spring 2017
 Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Reading Jain, Kasturi, Schunck, Machine Vision. McGraw-Hill, 1995. Sections 4.2-4.4, 4.5(intro), 4.5.5, 4.5.6, 5.1-5.4. [online handout] Image processing Brian Curless CSE 457 Spring 2017 1 2 What is an
Coarse-to-fine image registration
 Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Today we will look at a few important topics in scale space in computer vision, in particular, coarseto-fine approaches, and the SIFT feature descriptor. I will present only the main ideas here to give
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Anno accademico 2006/2007. Davide Migliore
 Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
Robotica Anno accademico 6/7 Davide Migliore migliore@elet.polimi.it Today What is a feature? Some useful information The world of features: Detectors Edges detection Corners/Points detection Descriptors?!?!?
COMPUTER VISION > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE
 COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
COMPUTER VISION 2017-2018 > OPTICAL FLOW UTRECHT UNIVERSITY RONALD POPPE OUTLINE Optical flow Lucas-Kanade Horn-Schunck Applications of optical flow Optical flow tracking Histograms of oriented flow Assignment
Classification and Detection in Images. D.A. Forsyth
 Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Classification and Detection in Images D.A. Forsyth Classifying Images Motivating problems detecting explicit images classifying materials classifying scenes Strategy build appropriate image features train
Image Pyramids and Applications
 Image Pyramids and Applications Computer Vision Jia-Bin Huang, Virginia Tech Golconda, René Magritte, 1953 Administrative stuffs HW 1 will be posted tonight, due 11:59 PM Sept 25 Anonymous feedback Previous
Image Pyramids and Applications Computer Vision Jia-Bin Huang, Virginia Tech Golconda, René Magritte, 1953 Administrative stuffs HW 1 will be posted tonight, due 11:59 PM Sept 25 Anonymous feedback Previous
An Intuitive Explanation of Fourier Theory
 An Intuitive Explanation of Fourier Theory Steven Lehar slehar@cns.bu.edu Fourier theory is pretty complicated mathematically. But there are some beautifully simple holistic concepts behind Fourier theory
An Intuitive Explanation of Fourier Theory Steven Lehar slehar@cns.bu.edu Fourier theory is pretty complicated mathematically. But there are some beautifully simple holistic concepts behind Fourier theory
Sampling and Reconstruction
 Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Sampling and Reconstruction Sampling and Reconstruction Sampling and Spatial Resolution Spatial Aliasing Problem: Spatial aliasing is insufficient sampling of data along the space axis, which occurs because
Peripheral drift illusion
 Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Peripheral drift illusion Does it work on other animals? Computer Vision Motion and Optical Flow Many slides adapted from J. Hays, S. Seitz, R. Szeliski, M. Pollefeys, K. Grauman and others Video A video
Edges, interpolation, templates. Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth)
") Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Gradients and edges edges are points of large gradient magnitude edge detection strategy 1. determine
Edges, interpolation, templates Nuno Vasconcelos ECE Department, UCSD (with thanks to David Forsyth) Gradients and edges edges are points of large gradient magnitude edge detection strategy 1. determine
Biomedical Image Analysis. Spatial Filtering
 Biomedical Image Analysis Contents: Spatial Filtering The mechanics of Spatial Filtering Smoothing and sharpening filters BMIA 15 V. Roth & P. Cattin 1 The Mechanics of Spatial Filtering Spatial filter:
Biomedical Image Analysis Contents: Spatial Filtering The mechanics of Spatial Filtering Smoothing and sharpening filters BMIA 15 V. Roth & P. Cattin 1 The Mechanics of Spatial Filtering Spatial filter:
Fourier Transform and Texture Filtering
 Fourier Transform and Texture Filtering Lucas J. van Vliet www.ph.tn.tudelft.nl/~lucas Image Analysis Paradigm scene Image formation sensor pre-processing Image enhancement Image restoration Texture filtering
Fourier Transform and Texture Filtering Lucas J. van Vliet www.ph.tn.tudelft.nl/~lucas Image Analysis Paradigm scene Image formation sensor pre-processing Image enhancement Image restoration Texture filtering
Anti-aliasing and sampling
 Anti-aliasing and sampling 1996-2017 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Sampling 2017 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 34 Spatial and temporal
Anti-aliasing and sampling 1996-2017 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ Sampling 2017 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 34 Spatial and temporal
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Computer Graphics. Sampling Theory & Anti-Aliasing. Philipp Slusallek
 Computer Graphics Sampling Theory & Anti-Aliasing Philipp Slusallek Dirac Comb (1) Constant & δ-function flash Comb/Shah function 2 Dirac Comb (2) Constant & δ-function Duality f(x) = K F(ω) = K (ω) And
Computer Graphics Sampling Theory & Anti-Aliasing Philipp Slusallek Dirac Comb (1) Constant & δ-function flash Comb/Shah function 2 Dirac Comb (2) Constant & δ-function Duality f(x) = K F(ω) = K (ω) And
Digital Image Processing. Image Enhancement - Filtering
 Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Digital Image Processing Image Enhancement - Filtering Derivative Derivative is defined as a rate of change. Discrete Derivative Finite Distance Example Derivatives in 2-dimension Derivatives of Images
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Digital Image Processing. Image Enhancement in the Frequency Domain
 Digital Image Processing Image Enhancement in the Frequency Domain Topics Frequency Domain Enhancements Fourier Transform Convolution High Pass Filtering in Frequency Domain Low Pass Filtering in Frequency
Digital Image Processing Image Enhancement in the Frequency Domain Topics Frequency Domain Enhancements Fourier Transform Convolution High Pass Filtering in Frequency Domain Low Pass Filtering in Frequency
Aliasing And Anti-Aliasing Sampling and Reconstruction
 Aliasing And Anti-Aliasing Sampling and Reconstruction An Introduction Computer Overview Intro - Aliasing Problem definition, Examples Ad-hoc Solutions Sampling theory Fourier transform Convolution Reconstruction
Aliasing And Anti-Aliasing Sampling and Reconstruction An Introduction Computer Overview Intro - Aliasing Problem definition, Examples Ad-hoc Solutions Sampling theory Fourier transform Convolution Reconstruction
Edge and local feature detection - 2. Importance of edge detection in computer vision
 Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Edge and local feature detection Gradient based edge detection Edge detection by function fitting Second derivative edge detectors Edge linking and the construction of the chain graph Edge and local feature
Image processing in frequency Domain
 Image processing in frequency Domain Introduction to Frequency Domain Deal with images in: -Spatial domain -Frequency domain Frequency Domain In the frequency or Fourier domain, the value and location
Image processing in frequency Domain Introduction to Frequency Domain Deal with images in: -Spatial domain -Frequency domain Frequency Domain In the frequency or Fourier domain, the value and location