3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
|
|
|
- Brian Todd
- 5 years ago
- Views:
Transcription
1 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012
 585 0327 Prerequisites: CS 6640 ImProc (or equiv.")
2 Administrivia Classes: M & W, :45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) Prerequisites: CS 6640 ImProc (or equiv.) Textbook: Computer Vision: Algorithms and Applications by Richard Szeliski Organization web-site (slides, documents and assignments)
3 Teaching Assistant TA: HW/SW: Kathlea Quebbeman, SoC Matlab+ev. Imaging Toolbox CADE lab WEB Office Hours: tbd
4 Prerequisites General Prerequisites: Data structures A good working knowledge of MATLAB programming (or willingness and time to pick it up quickly!) Linear algebra Vector calculus Assignments include theoretical paper questions and programming tasks (ideally Matlab or C++). Image Processing CS 6640 (or equivalent). Students who do not have background in signal processing / image processing: Eventually possible to follow class, but requires significant special effort to learn some basic procedures necessary to solve practical computer problems.

5 Textbook
6 Grading Assignments (4-6 theory/prog.): 50% Final project (incl. proposal and presentation): 20% Class participation: 10% Final project replaces final exam
7 Other Resources Cvonline: ine/ A first point of contact for explanations of different image related concepts and techniques. CVonline currently has about 2000 topics, 1600 of which have content. See list of other relevant books in syllabus.
8 Some Basics Instructor and TA do not use WebCT list (since most students use individual s) It will be your responsibility to regularly read the Announcements on WebCT We don t need a laptop for the class, please keep them closed!!!!! Please interact, ask questions, clarifications, input to instructor and TA
9 Syllabus See separate syllabus (on blackboard and linked to UofU class list). Document

10 Goal and Objectives From Snapshots, a 3-D View NYT, August 21, 2008, Personal Tech Stuart Goldenberg

11 Modeling 3D Structure from Pictures or 3D Sensors

12 Modeling ctd.
13 Goal and objectives To introduce the fundamental problems of computer vision. To introduce the main concepts and techniques used to solve those. To enable participants to implement solutions for reasonably complex problems. To enable the student to make sense of the literature of computer vision.
14 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what) movie post-processing CAM (computer-aided manufacturing Robot navigation face finding Various deep and attractive scientific mysteries how does object recognition work? Greater understanding of human vision

15 CV: What is the problem?
16 CV: A Hard Problem
17 Properties of Vision 3D representations are easily constructed There are many different cues. Useful to humans (avoid bumping into things; planning a grasp; etc.) in computer vision (build models for movies). Cues include multiple views (motion, stereopsis) texture shading
18 Properties of Vision People draw distinctions between what is seen Object recognition This could mean is this a fish or a bicycle? It could mean is this George Washington? It could mean is this poisonous or not? It could mean is this slippery or not? It could mean will this support my weight? Great mystery How to build programs that can draw useful distinctions based on image properties.
19 Main topics Shape (and motion) recovery What is the 3D shape of what I see? Segmentation What belongs together? Tracking Where does something go? Recognition What is it that I see?
20 Main topics Camera & Light Geometry, Radiometry, Color Digital images Filters, edges, texture, optical flow Shape (and motion) recovery Multi-view geometry Stereo, motion, photometric stereo, Segmentation Clustering, model fitting, probalistic Tracking Linear dynamics, non-linear dynamics Recognition templates, relations between templates
21 Camera and lights How images are formed Cameras What a camera does How to tell where the camera was Light How to measure light What light does at surfaces How the brightness values we see in cameras are determined Color The underlying mechanisms of color How to describe it and measure it
22 Motivation (some slides modified from Marc Pollefeys, UNC Chapel Hill & ETH Zurich)

23 Clothing Scan a person, custom-fit clothing

24 Forensics


25 3D urban modeling drive by modeling in Baltimore

26 Structure from Motion

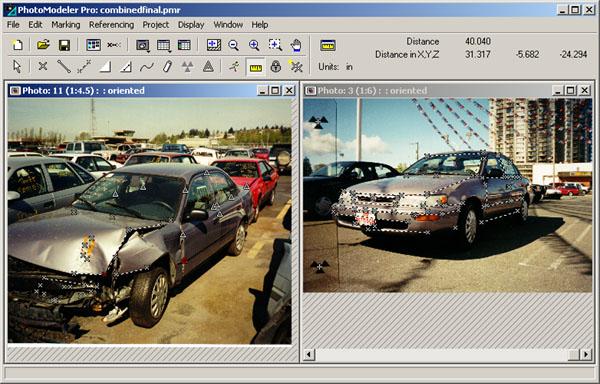
27 Industrial inspection Verify specifications Compare measured model with CAD


28 Scanning industrial sites as-build 3D model of off-shore oil platform
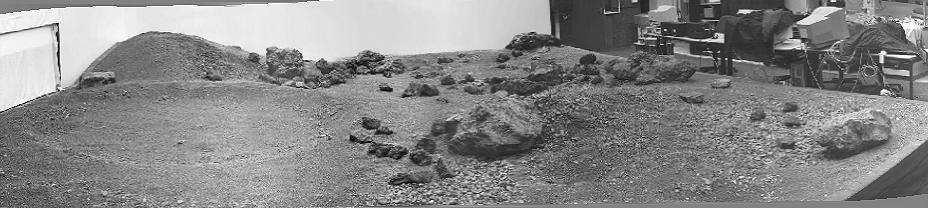
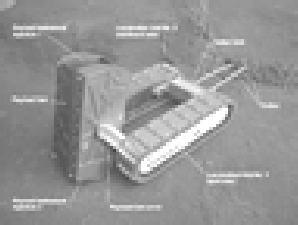





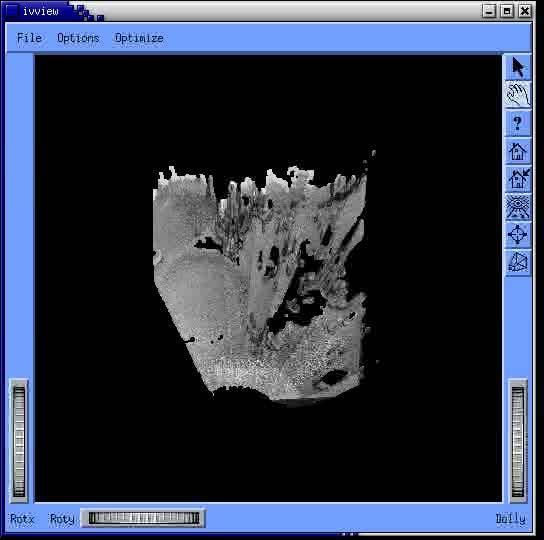
29 Robot navigation ESA project our task: Calibration + Terrain modelling + Visualization small tethered rover pan/tilt stereo head


30 Architecture Survey Stability analysis Plan renovations


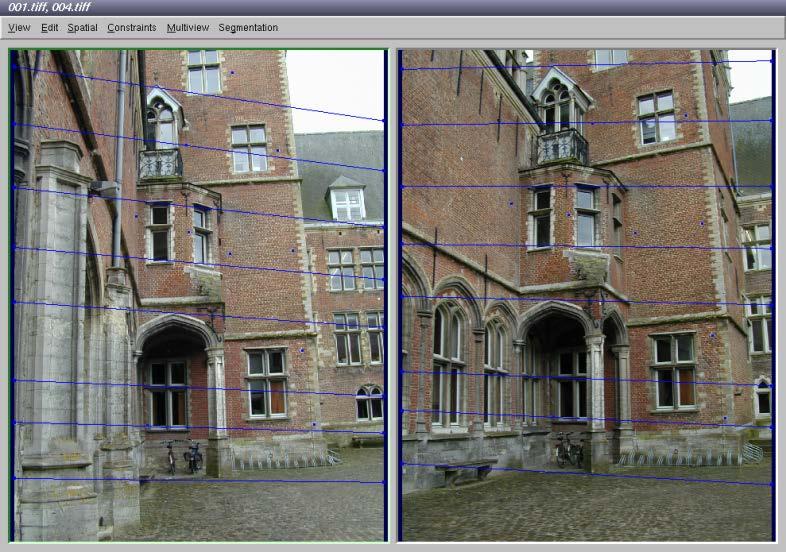
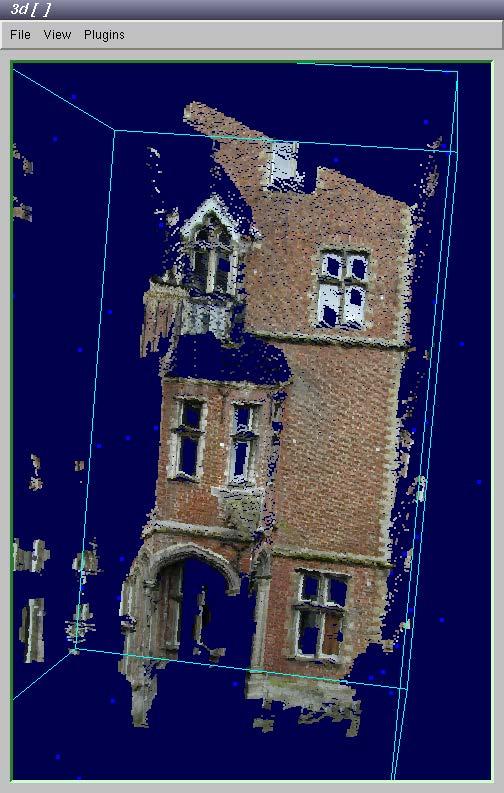
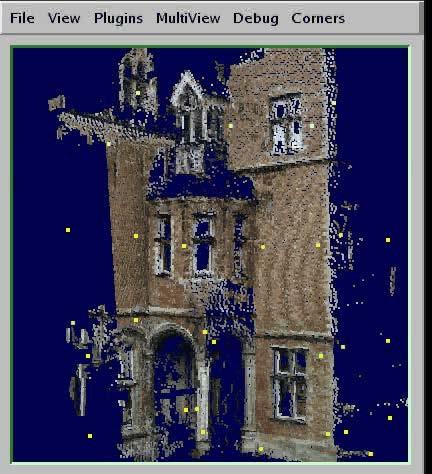
31 Survey Stability analysis Plan renovations Architecture


32 Cultural heritage Virtual Monticello Allow virtual visits




33 Cultural heritage Stanford s Digital Michelangelo Digital archive Art historic studies



34 IBM s pieta project Photometric stereo + structured light more info:
")
35 Archaeology accuracy ~1/500 from DV video (i.e. 140kb jpegs 576x720)



36 Sony s Eye Toy: Computer Vision for the masses Background segmentation/ motion detection Color segmentation





37 Shape from many different approaches/cues


38 Optical flow Where do pixels move?

39 Optical flow Where do pixels move?

40 Active Vision: Structured Light

41 Static Light Pattern Projection Geometry between projector, sensor and objects Segmentation of stripes from set of images




42 Active Vision: Structured Light Segmentation: Binarization and coding of stripes 3D model extracted from stripe pattern

43 Spatiotemporal Volumes Eric Bennet, UNC, PhD thesis
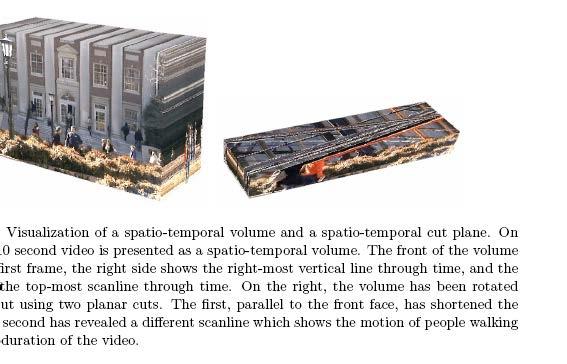
44 Spatiotemporal Volumes

45 Video-sequence editing II

46 Motion Tails

47 Object Tracking: Using Deformable Models in Vision

48 Object Tracking: Using Deformable Models in Vision: II

49 Object Tracking III

50 Face detection
51 Examples of Student Projects

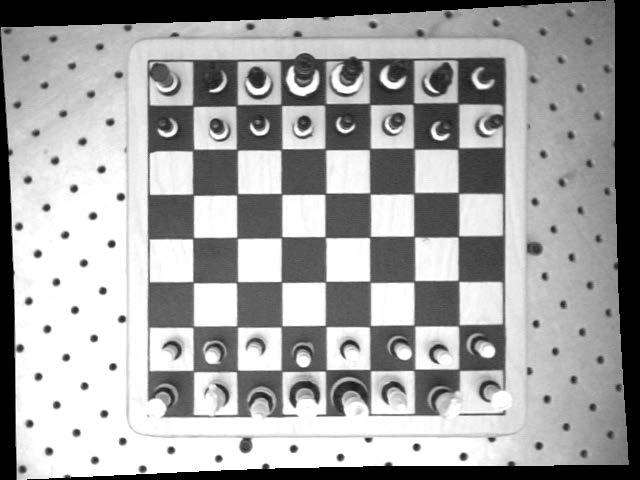
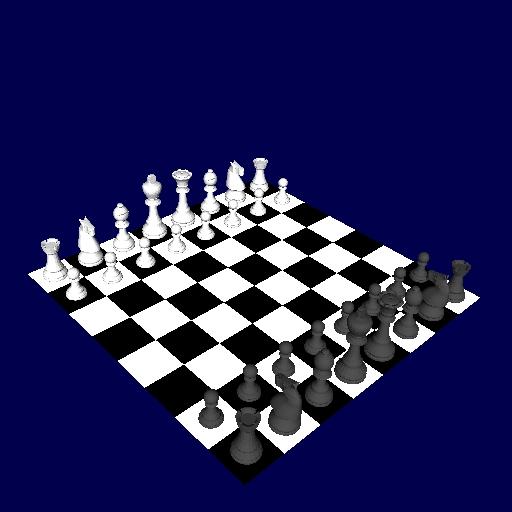
52 Student Project: Playing Chess, Recognition and Simulation Track individual chess pieces Maintain state of board Graphically represent state changes and state D. Allen, D. McLaurin UNC Major ideas: 3D from stereo detect and describe changes Use world knowledge (chess)

53 Calibration, Rendering & Replay Movie



54 Enhanced Correlation for Stereo Vision Andrew Nashel Correlation map produced by precomputation method:





55 Results Lord Buddha Images Pre-Processed Images Guozhen Fan and Aman Shah Original Image Albedo Map Surface Normals Obtained Surfaces from different angles





56 Photometric Stereo Christopher Bireley Bandage Dog Imaging Setup
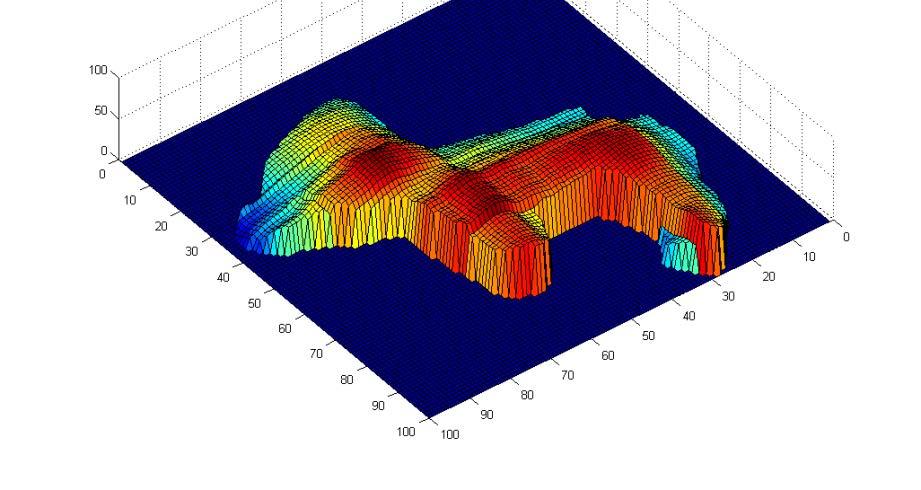





57 Photometric Stereo Christopher Bireley Albedo image Surface Normals 3D mesh



58 Structured Light James Clark Result Positioned camera with object in view
59 Structured Light ctd. James Clark

60 Webcam Based Virtual Whiteboard Jon Bronson James Fishbaugh

61 Webcam Based Virtual Whiteboard Jon Bronson James Fishbaugh


62 Structured Light Anuja Sharma, Abishek Kumar


63 Structured Light Anuja Sharma, Abishek Kumar



64 Realtime Glowstick Detection Andrei Ostanin movie

65 Passive Object Tracking from Stereo Vision 3D visualization - blood vessels, organs, teapots Stereo displays require head tracking Cumbersome trackers are undesirable Michael Rosenthal


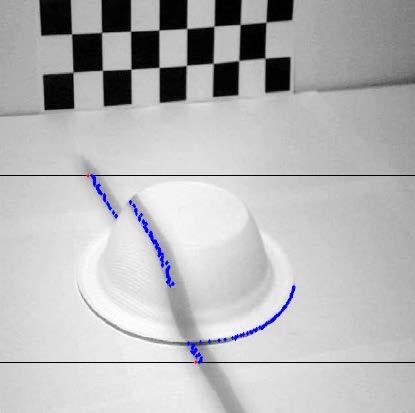
66 3D shape from silhouettes: Two Mirrors and uncalibrated camera Forbes et al., ICCV2005 Christine Xu, Computer Vision Student Project Scientific Computing and Imaging Institute, University of Utah


67 3D shape from silhouettes Segmentation of contours Think about the geometry -> calculate relationship between silhouettes Result: 3D Object Scientific Computing and Imaging Institute, University of Utah

68 Next class: Cameras Chapter 2: Image Formation
69 Next class: Image Formation Chapter 2: Textbook Please find pdf copies of Chapters 1&2 on the website. Assignment: Read Chapter 1 for additional materials Read Chapter 2 for preparation of 2 nd lecture
3D Computer Vision Introduction. Guido Gerig CS 6320, Spring 2012
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2012 gerig@sci.utah.edu Administrivia Classes: M & W, 1.25-2:45 Room WEB L126 Instructor: Guido Gerig gerig@sci.utah.edu (801) 585 0327 Prerequisites:
3D Computer Vision Introduction
 3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction Tom Henderson CS 6320 S2014 tch@cs.utah.edu Acknowledgements: slides from Guido Gerig (Utah) & Marc Pollefeys, UNC Chapel Hill) Administration Classes: M & W, 1:25-2:45
3D Computer Vision Introduction
 3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2013 gerig@sci.utah.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Administrivia Classes:
3D Computer Vision Introduction Guido Gerig CS 6320, Spring 2013 gerig@sci.utah.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Administrivia Classes:
Computer Vision Introduction
 Computer Vision Introduction Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Classes: Instructor:
Computer Vision Introduction Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Acknowledgements: some slides from Marc Pollefeys and Prof. Trevor Darrell, trevor@eecs.berkeley.edu Classes: Instructor:
Project Ideas. Guido Gerig CS 6643, Computer Vision Spring 2016
 Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Project Ideas Guido Gerig CS 6643, Computer Vision Spring 2016 Final Project 3D CV Work on your own. Select a 3D vision method (examples given in slides). Develop a project that goes from input data to
Why study Computer Vision?
 Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Computer Vision Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance
Why study Computer Vision?
 Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Why study Computer Vision? Images and movies are everywhere Fast-growing collection of useful applications building representations of the 3D world from pictures automated surveillance (who s doing what)
Introduction. Prof. Kyoung Mu Lee SoEECS, Seoul National University
 Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
Introduction 1 Introduction to Computer Vision Introduction Prof. Kyoung Mu Lee SoEECS, Seoul National University Goal and Objectives Introduction 2 To introduce the fundamental problems of computer vision.
CS595:Introduction to Computer Vision
 CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
CS595:Introduction to Computer Vision Instructor: Qi Li Instructor Course syllabus E-mail: qi.li@cs.wku.edu Office: TCCW 135 Office hours MW: 9:00-10:00, 15:00-16:00 T: 9:00-12:00, 14:00-16:00 F: 9:00-10:00
Recap from Previous Lecture
 Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Recap from Previous Lecture Tone Mapping Preserve local contrast or detail at the expense of large scale contrast. Changing the brightness within objects or surfaces unequally leads to halos. We are now
Shape from Silhouettes II
 Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Lecture 1 Course Introduction
 UMass Lowell Computer Science 91.580.201 Geometric Modeling Prof. Karen Daniels Spring, 2009 Lecture 1 Course Introduction Course Introduction What is Geometric Modeling? Adapted from: Geometric Modeling
UMass Lowell Computer Science 91.580.201 Geometric Modeling Prof. Karen Daniels Spring, 2009 Lecture 1 Course Introduction Course Introduction What is Geometric Modeling? Adapted from: Geometric Modeling
15-462: Computer Graphics. Jessica Hodgins and Alla Safonova
 15-462: Computer Graphics Jessica Hodgins and Alla Safonova Introduction Administrivia Who are we? What is computer graphics? A few case studies Administration Web page www.cs.cmu.edu/~jkh/462_s07 Linked
15-462: Computer Graphics Jessica Hodgins and Alla Safonova Introduction Administrivia Who are we? What is computer graphics? A few case studies Administration Web page www.cs.cmu.edu/~jkh/462_s07 Linked
CS535: Interactive Computer Graphics
 CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
CS535: Interactive Computer Graphics Instructor: Daniel G. Aliaga (aliaga@cs.purdue.edu, www.cs.purdue.edu/homes/aliaga) Classroom: LWSN B134 Time: MWF @ 1:30-2:20pm Office hours: by appointment (LWSN
What is Computer Vision? Introduction. We all make mistakes. Why is this hard? What was happening. What do you see? Intro Computer Vision
 What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
What is Computer Vision? Trucco and Verri (Text): Computing properties of the 3-D world from one or more digital images Introduction Introduction to Computer Vision CSE 152 Lecture 1 Sockman and Shapiro:
CS 684 Fall 2005 Image-based Modeling and Rendering. Ruigang Yang
 CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
CS 684 Fall 2005 Image-based Modeling and Rendering Ruigang Yang Administrivia Classes: Monday and Wednesday, 4:00-5:15 PM Instructor: Ruigang Yang ryang@cs.uky.edu Office Hour: Robotics 514D, MW 1500-1600
Computer Vision, CS766. Staff. Instructor: Li Zhang TA: Jake Rosin
 Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision, CS766 Staff Instructor: Li Zhang lizhang@cs.wisc.edu TA: Jake Rosin rosin@cs.wisc.edu Today Introduction Administrative Stuff Overview of the Course About Me Li Zhang ( 张力 ) Last name
Computer Vision. 3D acquisition
 è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
è Computer 3D acquisition Acknowledgement Courtesy of Prof. Luc Van Gool 3D acquisition taxonomy s image cannot currently be displayed. 3D acquisition methods Thi passive active uni-directional multi-directional
Computer Vision. I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University
 Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Computer Vision I-Chen Lin, Assistant Professor Dept. of CS, National Chiao Tung University About the course Course title: Computer Vision Lectures: EC016, 10:10~12:00(Tues.); 15:30~16:20(Thurs.) Pre-requisites:
Practice Exam Sample Solutions
 CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
CS 675 Computer Vision Instructor: Marc Pomplun Practice Exam Sample Solutions Note that in the actual exam, no calculators, no books, and no notes allowed. Question 1: out of points Question 2: out of
Computer Vision Course Lecture 04. Template Matching Image Pyramids. Ceyhun Burak Akgül, PhD cba-research.com. Spring 2015 Last updated 11/03/2015
 Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
Computer Vision Course Lecture 04 Template Matching Image Pyramids Ceyhun Burak Akgül, PhD cba-research.com Spring 2015 Last updated 11/03/2015 Photo credit: Olivier Teboul vision.mas.ecp.fr/personnel/teboul
EECS 442 Computer Vision fall 2011
 EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
EECS 442 Computer Vision fall 2011 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. (after conversation hour) GSIs: Mohit
CS4620/5620 Introduction to Computer Graphics
 CS4620/5620 Introduction to Computer Graphics Prof. Steve Marschner Cornell CS4620/5620 Spring 2017 Lecture 1 2017 Steve Marschner 1 Computer graphics The study of creating, manipulating, and using visual
CS4620/5620 Introduction to Computer Graphics Prof. Steve Marschner Cornell CS4620/5620 Spring 2017 Lecture 1 2017 Steve Marschner 1 Computer graphics The study of creating, manipulating, and using visual
Multi-View Geometry (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/, Trevor
Multi-View Geometry (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/, Trevor
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book)
") Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Multi-View Geometry Part II (Ch7 New book. Ch 10/11 old book) Guido Gerig CS-GY 6643, Spring 2016 gerig@nyu.edu Credits: M. Shah, UCF CAP5415, lecture 23 http://www.cs.ucf.edu/courses/cap6411/cap5415/,
Thanks to Chris Bregler. COS 429: Computer Vision
 Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Thanks to Chris Bregler COS 429: Computer Vision COS 429: Computer Vision Instructor: Thomas Funkhouser funk@cs.princeton.edu Preceptors: Ohad Fried, Xinyi Fan {ohad,xinyi}@cs.princeton.edu Web page: http://www.cs.princeton.edu/courses/archive/fall13/cos429/
Computer Graphics Introduction. Taku Komura
 Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Computer Graphics Introduction Taku Komura What s this course all about? We will cover Graphics programming and algorithms Graphics data structures Applied geometry, modeling and rendering Not covering
Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by ) Readings Szeliski, Chapter 10 (through 10.5)
 Readings Szeliski, Chapter 10 (through 10.5)") Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Announcements Project 3 code & artifact due Tuesday Final project proposals due noon Wed (by email) One-page writeup (from project web page), specifying:» Your team members» Project goals. Be specific.
Assignment 2: Stereo and 3D Reconstruction from Disparity
 CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
CS 6320, 3D Computer Vision Spring 2013, Prof. Guido Gerig Assignment 2: Stereo and 3D Reconstruction from Disparity Out: Mon Feb-11-2013 Due: Mon Feb-25-2013, midnight (theoretical and practical parts,
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Introduction to Computer Vision
 Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
Introduction to Computer Vision Dr. Gerhard Roth COMP 4102A Winter 2015 Version 2 General Information Instructor: Adjunct Prof. Dr. Gerhard Roth gerhardroth@rogers.com read hourly gerhardroth@cmail.carleton.ca
CS354 Computer Graphics Introduction. Qixing Huang Januray 17 8h 2017
 CS354 Computer Graphics Introduction Qixing Huang Januray 17 8h 2017 CS 354 Computer Graphics Instructor: Qixing Huang huangqx@cs.utexas.edu Office: GDC 5.422 Office hours: Friday 3:00 pm 5:00 pm Teaching
CS354 Computer Graphics Introduction Qixing Huang Januray 17 8h 2017 CS 354 Computer Graphics Instructor: Qixing Huang huangqx@cs.utexas.edu Office: GDC 5.422 Office hours: Friday 3:00 pm 5:00 pm Teaching
CIS 581 Interactive Computer Graphics (slides based on Dr. Han-Wei Shen s slides) Requirements. Reference Books. Textbook
 Requirements. Reference Books. Textbook") CIS 581 Interactive Computer Graphics (slides based on Dr. Han-Wei Shen s slides) Instructor: Rick Parent (parent@cse.osu.edu) Credit: 4 Class: MWF 10:30 11:18 pm DL357 Office hours: MW 11:30 12:18 DL
CIS 581 Interactive Computer Graphics (slides based on Dr. Han-Wei Shen s slides) Instructor: Rick Parent (parent@cse.osu.edu) Credit: 4 Class: MWF 10:30 11:18 pm DL357 Office hours: MW 11:30 12:18 DL
CS 534: Computer Vision Segmentation and Perceptual Grouping
 CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
CS 534: Computer Vision Segmentation and Perceptual Grouping Spring 2005 Ahmed Elgammal Dept of Computer Science CS 534 Segmentation - 1 Where are we? Image Formation Human vision Cameras Geometric Camera
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
CS559: Computer Graphics. Lecture 1 Introduction Li Zhang University of Wisconsin, Madison
 CS559: Computer Graphics Lecture 1 Introduction Li Zhang University of Wisconsin, Madison Today Introduction to Computer Graphics Course Overview What is Computer Graphics Using computers to generate and
CS559: Computer Graphics Lecture 1 Introduction Li Zhang University of Wisconsin, Madison Today Introduction to Computer Graphics Course Overview What is Computer Graphics Using computers to generate and
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
CIS 581 Interactive Computer Graphics
 CIS 581 Interactive Computer Graphics Instructor: Han-Wei Shen (hwshen@cse.ohio-state.edu) Credit: 4 Class: MWF 2:30 pm 3:18 pm DL 264 Office hours: TuTr 11 am - 12pm DL 789 Web: http://www.cse.ohio-state.edu/~hwshen/581
CIS 581 Interactive Computer Graphics Instructor: Han-Wei Shen (hwshen@cse.ohio-state.edu) Credit: 4 Class: MWF 2:30 pm 3:18 pm DL 264 Office hours: TuTr 11 am - 12pm DL 789 Web: http://www.cse.ohio-state.edu/~hwshen/581
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Other Reconstruction Techniques
 Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Other Reconstruction Techniques Ruigang Yang CS 684 CS 684 Spring 2004 1 Taxonomy of Range Sensing From Brain Curless, SIGGRAPH 00 Lecture notes CS 684 Spring 2004 2 Taxonomy of Range Scanning (cont.)
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Karen Liu associate professor at School of Interactive Computing. Murali Varma graduate student at School of Interactive Computing
 Computer Animation Karen Liu associate professor at School of Interactive Computing Murali Varma graduate student at School of Interactive Computing Administrations http://www.cc.gatech.edu/classes/ay2012/
Computer Animation Karen Liu associate professor at School of Interactive Computing Murali Varma graduate student at School of Interactive Computing Administrations http://www.cc.gatech.edu/classes/ay2012/
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Computer Vision. Alexandra Branzan Albu Spring 2010
 Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
Computer Vision Alexandra Branzan Albu Spring 2010 Staff Instructor: Alexandra Branzan Albu www.ece.uvic.ca/~aalbu email: aalbu@ece.uvic.ca Office hours (EOW 631): by appointment CENG 421/ ELEC 536 : Computer
CSc I6716 Spring D Computer Vision. Introduction. Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
Introduction CSc I6716 Spring 2012 Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation p Books, notes, etc. Web page
CAP 5415 Computer Vision. Fall 2011
 CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
CAP 5415 Computer Vision Fall 2011 General Instructor: Dr. Mubarak Shah Email: shah@eecs.ucf.edu Office: 247-F HEC Course Class Time Tuesdays, Thursdays 12 Noon to 1:15PM 383 ENGR Office hours Tuesdays
Introduction to Computer Vision MARCH 2018
 Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
Introduction to Computer Vision RODNEY DOCKTER, PH.D. MARCH 2018 1 Rodney Dockter (me) Ph.D. in Mechanical Engineering from the University of Minnesota Worked in Dr. Tim Kowalewski s lab Medical robotics
CSE 167: Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2013 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
CS 682: Computer Vision
 CS 682: Computer Vision Dr. Zoran Duric CS Dept. GMU January 27, 2009 Office: S&T II, Rm. 427 email: zduric@cs.gmu.edu Office Hours: Tue. 2:00-4:00pm, Thu 1:30-2:30pm or by app. URL: http://www.cs.gmu.edu/
CS 682: Computer Vision Dr. Zoran Duric CS Dept. GMU January 27, 2009 Office: S&T II, Rm. 427 email: zduric@cs.gmu.edu Office Hours: Tue. 2:00-4:00pm, Thu 1:30-2:30pm or by app. URL: http://www.cs.gmu.edu/
CSCD18: Computer Graphics. Instructor: Leonid Sigal
 CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
CSCD18: Computer Graphics Instructor: Leonid Sigal CSCD18: Computer Graphics Instructor: Leonid Sigal (call me Leon) lsigal@utsc.utoronto.ca www.cs.toronto.edu/~ls/ Office: SW626 Office Hour: M, 12-1pm?
Lecture 0 of 41: Part A Course Organization. Introduction to Computer Graphics: Course Organization and Survey
 Lecture 0 of 41: Part A Course Organization : Course Organization and Survey William H. Hsu Department of Computing and Information Sciences, KSU KSOL course page: http://bit.ly/hgvxlh Course web site:
Lecture 0 of 41: Part A Course Organization : Course Organization and Survey William H. Hsu Department of Computing and Information Sciences, KSU KSOL course page: http://bit.ly/hgvxlh Course web site:
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV Venus de Milo
 Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Vision Sensing Multi-View Stereo for Community Photo Collections Michael Goesele, et al, ICCV 2007 Venus de Milo The Digital Michelangelo Project, Stanford How to sense 3D very accurately? How to sense
Introductions. Today. Computer Vision Jan 19, What is computer vision? 1. Vision for measurement. Computer Vision
 Introductions Instructor: Prof. Kristen Grauman grauman@cs.utexas.edu Computer Vision Jan 19, 2011 TA: Shalini Sahoo shalini@cs.utexas.edu Today What is computer vision? Course overview Requirements, logistics
Introductions Instructor: Prof. Kristen Grauman grauman@cs.utexas.edu Computer Vision Jan 19, 2011 TA: Shalini Sahoo shalini@cs.utexas.edu Today What is computer vision? Course overview Requirements, logistics
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
EECS 442 Computer Vision fall 2012
 EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao (ywchao125@gmail.com)
EECS 442 Computer Vision fall 2012 Instructor Silvio Savarese silvio@eecs.umich.edu Office: ECE Building, room: 4435 Office hour: Tues 4:30-5:30pm or under appoint. GSI: Johnny Chao (ywchao125@gmail.com)
Course Web Site ENGN2501 DIGITAL GEOMETRY PROCESSING. Tue & Thu Barus&Holley 157
 ENGN2501 DIGITAL GEOMETRY PROCESSING Tue & Thu 2:30-3:50 @ Barus&Holley 157 Instructor: Gabriel Taubin http://mesh.brown.edu/dgp } Polygon Meshes / Point Clouds } Representation / Data
ENGN2501 DIGITAL GEOMETRY PROCESSING Tue & Thu 2:30-3:50 @ Barus&Holley 157 Instructor: Gabriel Taubin http://mesh.brown.edu/dgp } Polygon Meshes / Point Clouds } Representation / Data
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Computer Graphics Disciplines. Grading. Textbooks. Course Overview. Assignment Policies. Computer Graphics Goals I
 CSCI 480 Computer Graphics Lecture 1 Course Overview January 10, 2011 Jernej Barbic University of Southern California Administrative Issues Modeling Animation Rendering OpenGL Programming Course Information
CSCI 480 Computer Graphics Lecture 1 Course Overview January 10, 2011 Jernej Barbic University of Southern California Administrative Issues Modeling Animation Rendering OpenGL Programming Course Information
Final Exam Study Guide
 Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
Final Exam Study Guide Exam Window: 28th April, 12:00am EST to 30th April, 11:59pm EST Description As indicated in class the goal of the exam is to encourage you to review the material from the course.
COMPUTER GRAPHICS CS
 COMPUTER GRAPHICS CS-234325 http://webcourse.cs.technion.ac.il/234325/ Lecture Syllabus Introduction (1 week) Transformations (2 weeks) Line Drawing (1 weeks) Polygon Fill (1 week) Hidden Surface Removal
COMPUTER GRAPHICS CS-234325 http://webcourse.cs.technion.ac.il/234325/ Lecture Syllabus Introduction (1 week) Transformations (2 weeks) Line Drawing (1 weeks) Polygon Fill (1 week) Hidden Surface Removal
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Project 2 due today Project 3 out today. Readings Szeliski, Chapter 10 (through 10.5)
") Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Announcements Stereo Project 2 due today Project 3 out today Single image stereogram, by Niklas Een Readings Szeliski, Chapter 10 (through 10.5) Public Library, Stereoscopic Looking Room, Chicago, by Phillips,
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Introduction to 2 What is? A process that produces from images of the external world a description
Computer Graphics. Anders Hast. måndag 25 mars 13
 Computer Graphics Anders Hast Who am I? 5 years in Industry after graduation, 2 years as highschool teacher. 1996 Teacher, University of Gävle 2004 PhD, Computerized Image Processing Computer Graphics
Computer Graphics Anders Hast Who am I? 5 years in Industry after graduation, 2 years as highschool teacher. 1996 Teacher, University of Gävle 2004 PhD, Computerized Image Processing Computer Graphics
CS380: Introduction to Computer Graphics Introduction to OpenGLSL. Min H. Kim KAIST School of Computing. [CS380] Introduction to Computer Graphics
![CS380: Introduction to Computer Graphics Introduction to OpenGLSL. Min H. Kim KAIST School of Computing. [CS380] Introduction to Computer Graphics](/thumbs/79/79530457.jpg "CS380: Introduction to Computer Graphics Introduction to OpenGLSL. Min H. Kim KAIST School of Computing. [CS380] Introduction to Computer Graphics") CS380: Introduction to Computer Graphics Introduction to OpenGLSL Min H. Kim KAIST School of Computing Welcome [CS380] Introduction to Computer Graphics Professor: Min H. Kim ( 김민혁 ) (minhkim@vclab.kaist.ac.kr)
CS380: Introduction to Computer Graphics Introduction to OpenGLSL Min H. Kim KAIST School of Computing Welcome [CS380] Introduction to Computer Graphics Professor: Min H. Kim ( 김민혁 ) (minhkim@vclab.kaist.ac.kr)
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T
 S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
S U N G - E U I YO O N, K A I S T R E N D E R I N G F R E E LY A VA I L A B L E O N T H E I N T E R N E T Copyright 2018 Sung-eui Yoon, KAIST freely available on the internet http://sglab.kaist.ac.kr/~sungeui/render
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Think-Pair-Share. What visual or physiological cues help us to perceive 3D shape and depth?
 Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Think-Pair-Share What visual or physiological cues help us to perceive 3D shape and depth? [Figure from Prados & Faugeras 2006] Shading Focus/defocus Images from same point of view, different camera parameters
Goals. Computer Graphics (Fall 2008) Course Outline. Course Outline. Course Outline. Demo: Surreal and Crazy World (HW 3)
 Course Outline. Course Outline. Course Outline. Demo: Surreal and Crazy World (HW 3)") Computer Graphics (Fall 2008) COMS 4160, Lecture 1: Overview and History Ravi Ramamoorthi http://www.cs.columbia.edu/~cs4160 Goals Systems: Be able to write complex 3D graphics programs (real-time in OpenGL,
Computer Graphics (Fall 2008) COMS 4160, Lecture 1: Overview and History Ravi Ramamoorthi http://www.cs.columbia.edu/~cs4160 Goals Systems: Be able to write complex 3D graphics programs (real-time in OpenGL,
Announcements. Introduction. Why is this hard? What is Computer Vision? We all make mistakes. What do you see? Class Web Page is up:
 Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
Announcements Introduction Computer Vision I CSE 252A Lecture 1 Class Web Page is up: http://www.cs.ucsd.edu/classes/wi05/cse252a/ Assignment 0: Getting Started with Matlab is posted to web page, due 1/13/04
UNIK 4690 Maskinsyn Introduction
 UNIK 4690 Maskinsyn Introduction 18.01.2018 Trym Vegard Haavardsholm (trym.haavardsholm@its.uio.no) Idar Dyrdal (idar.dyrdal@its.uio.no) Thomas Opsahl (thomasoo@its.uio.no) Ragnar Smestad (ragnar.smestad@ffi.no)
UNIK 4690 Maskinsyn Introduction 18.01.2018 Trym Vegard Haavardsholm (trym.haavardsholm@its.uio.no) Idar Dyrdal (idar.dyrdal@its.uio.no) Thomas Opsahl (thomasoo@its.uio.no) Ragnar Smestad (ragnar.smestad@ffi.no)
Using a Raster Display Device for Photometric Stereo
 DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
DEPARTMEN T OF COMP UTING SC IENC E Using a Raster Display Device for Photometric Stereo Nathan Funk & Yee-Hong Yang CRV 2007 May 30, 2007 Overview 2 MODEL 3 EXPERIMENTS 4 CONCLUSIONS 5 QUESTIONS 1. Background
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein. Lecture 23: Photometric Stereo
 CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
CS4670/5760: Computer Vision Kavita Bala Scott Wehrwein Lecture 23: Photometric Stereo Announcements PA3 Artifact due tonight PA3 Demos Thursday Signups close at 4:30 today No lecture on Friday Last Time:
3D Photography: Active Ranging, Structured Light, ICP
 3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
3D Photography: Active Ranging, Structured Light, ICP Kalin Kolev, Marc Pollefeys Spring 2013 http://cvg.ethz.ch/teaching/2013spring/3dphoto/ Schedule (tentative) Feb 18 Feb 25 Mar 4 Mar 11 Mar 18 Mar
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
Structure from Motion. Lecture-15
 Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Structure from Motion Lecture-15 Shape From X Recovery of 3D (shape) from one or two (2D images). Shape From X Stereo Motion Shading Photometric Stereo Texture Contours Silhouettes Defocus Applications
Computer Vision EE837, CS867, CE803
 Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Computer Vision EE837, CS867, CE803 Introduction Lecture 01 Computer Vision Prerequisites Basic linear Algebra, probability, calculus - Required Basic data structures/programming knowledge - Required Working
Computer Graphics. Instructor: Oren Kapah. Office Hours: T.B.A.
 Computer Graphics Instructor: Oren Kapah (orenkapahbiu@gmail.com) Office Hours: T.B.A. The CG-IDC slides for this course were created by Toky & Hagit Hel-Or 1 CG-IDC 2 Exercise and Homework The exercise
Computer Graphics Instructor: Oren Kapah (orenkapahbiu@gmail.com) Office Hours: T.B.A. The CG-IDC slides for this course were created by Toky & Hagit Hel-Or 1 CG-IDC 2 Exercise and Homework The exercise
Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Today Course overview Course organization Vectors and Matrices 2 What is computer
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2011 Today Course overview Course organization Vectors and Matrices 2 What is computer
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
3D Computer Vision. Introduction. Introduction. CSc I6716 Fall Instructor: Zhigang Zhu City College of New York
 Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Introduction CSc I6716 Fall 2010 3D Computer Vision Introduction Instructor: Zhigang Zhu City College of New York zzhu@ccny.cuny.edu Course Information Basic Information: Course participation Books, notes,
Passive 3D Photography
 SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
SIGGRAPH 2000 Course on 3D Photography Passive 3D Photography Steve Seitz Carnegie Mellon University University of Washington http://www.cs cs.cmu.edu/~ /~seitz Visual Cues Shading Merle Norman Cosmetics,
CSE 167: Introduction to Computer Graphics. Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016
 CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
CSE 167: Introduction to Computer Graphics Jürgen P. Schulze, Ph.D. University of California, San Diego Fall Quarter 2016 Today Course organization Course overview 2 Course Staff Instructor Jürgen Schulze,
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
CSE 455: Computer Vision Winter 2007
 CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
CSE 455: Computer Vision Winter 2007 Instructor: Professor Linda Shapiro (shapiro@cs) Additional Instructor: Dr. Matthew Brown (brown@microsoft.com) TAs: Masa Kobashi (mkbsh@cs) Peter Davis (pediddle@cs)
CS5620 Intro to Computer Graphics
 CS 5620 Fall 2015 www.youtube.com/watch?v=hjhic0mt4ts 3 Computer Graphics Synthesis of static/dynamic 2D images from 3D geometry using computers Teaching Staff Lecturer: Prof. Craig Gotsman Class: Mon
CS 5620 Fall 2015 www.youtube.com/watch?v=hjhic0mt4ts 3 Computer Graphics Synthesis of static/dynamic 2D images from 3D geometry using computers Teaching Staff Lecturer: Prof. Craig Gotsman Class: Mon
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Epipolar Geometry and Stereo Vision
 CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
CS 1674: Intro to Computer Vision Epipolar Geometry and Stereo Vision Prof. Adriana Kovashka University of Pittsburgh October 5, 2016 Announcement Please send me three topics you want me to review next
視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]
![視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]](/thumbs/95/123948781.jpg "視覚情報処理論. (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35]") 視覚情報処理論 (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35] Computer Vision Design algorithms to implement the function of human vision 3D reconstruction from 2D image (retinal image)
視覚情報処理論 (Visual Information Processing ) 開講所属 : 学際情報学府水 (Wed)5 [16:50-18:35] Computer Vision Design algorithms to implement the function of human vision 3D reconstruction from 2D image (retinal image)
Welcome to CS 4/57101 Computer Graphics
 Welcome to CS 4/57101 Computer Graphics Goal: The goal of this course is to provide an introduction to the theory and practice of computer graphics. The course will assume a good background in programming
Welcome to CS 4/57101 Computer Graphics Goal: The goal of this course is to provide an introduction to the theory and practice of computer graphics. The course will assume a good background in programming
CS380: Computer Graphics Introduction. Sung-Eui Yoon ( 윤성의 ) Course URL:
 Course URL:") CS380: Computer Graphics Introduction Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg About the Instructor Joined KAIST at 2007 Main Research Focus Handle massive data for various
CS380: Computer Graphics Introduction Sung-Eui Yoon ( 윤성의 ) Course URL: http://sglab.kaist.ac.kr/~sungeui/cg About the Instructor Joined KAIST at 2007 Main Research Focus Handle massive data for various