Camera Parameters, Calibration and Radiometry. Readings Forsyth & Ponce- Chap 1 & 2 Chap & 3.2 Chap 4
|
|
|
- Delphia Carter
- 6 years ago
- Views:
Transcription
1 Camera Parameters, Calibration and Radiometry Readings Forsyth & Ponce- Chap 1 & 2 Chap & 3.2 Chap 4
2 Camera parameters U V W " # $ $ $ % & ' ' ' = Transformation representing intrinsic parameters " # $ $ $ % & ' ' ' " # $ $ $ % & ' ' ' Transformation representing extrinsic parameters " # $ $ $ % & ' ' ' X Y Z T " # $ $ $ $ % & ' ' ' ' From last time.
3 Homogeneous Coordinates (Again)
4 Extrinsic Parameters: Characterizing Camera position in world coordinates Chasles's theorem: Any motion of a solid body can be composed of a translation and a rotation.
5 3D Rotation Matrices
6 3D Rotation Matrices cont d Euler s Theorem: An arbitrary rotation can be described by 3 rotation parameters For example: R = More Generally: Most General:
7 Rodrigue s Formula Take any rotation axis a and angle θ: What is the matrix? with R = e Aθ

8 Rotations can be represented as points in space (with care) Turn vector length into angle, direction into axis: Useful for generating random rotations, understanding angular errors, characterizing angular position, etc. Problem: not unique Not commutative

9 Other Properties of rotations NOT Commutative R1*R2 R2*R1

10 Rotations To form a rotation matrix, you can plug in the columns of new coordinate points For Example: The unit x-vector goes to x :
11 Other Properties of Rotations Inverse: R -1 = R T rows, columns are othonormal r T i r j = 0 if i j, else r T i r i = 1 Determinant: det( R ) = 1 The effect of a coordinate rotation on a function: x = R x F( x ) = F( R -1 x )

12 Extrinsic Parameters p = R p + t R = rotation matrix t = translation vector In Homogeneous coordinates, p = R p + t =>



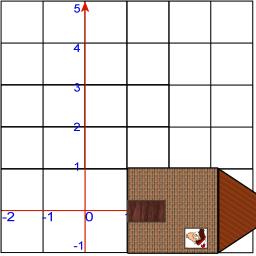

13 Rotation 90 o Scaling *2 Translation 1 y x p = House Points 2D Example


14 Intrinsic Parameters Differential Scaling Camera Origin Offset

15 The Whole (Linear) Transformation " U $ V $ # W " X% % " Transformation %" % " Transformation % $ ' ' ' = $ ' $ ' $ ' representing representing $ Y ' $ $ ' $ ' $ ' Z' & # intrinsic parameters& # & # extrinsic parameters& $ ' # T & Final image coordinates u =U/W v =U/W
16
17
18
19
20
21
22
23



24 Non-linear distortions (not handled by our treatment)
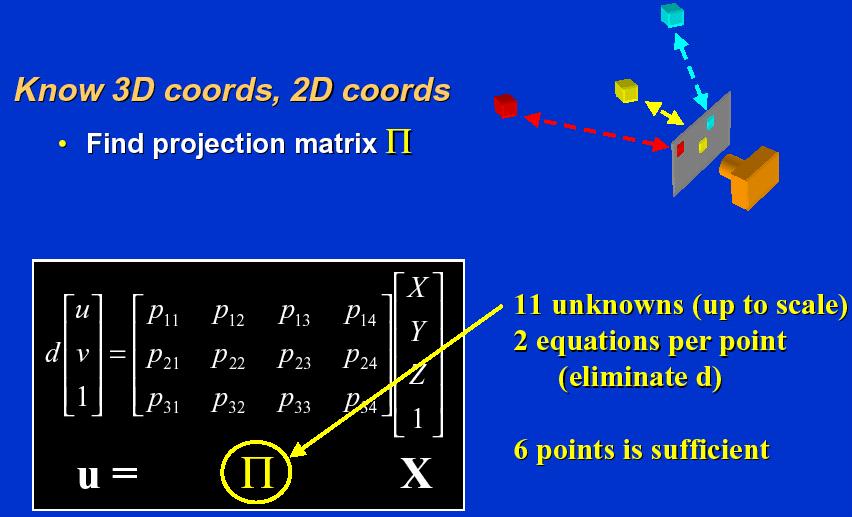
25 Camera Calibration You need to know something beyond what you get out of the camera Known World points (object) Traditional camera calibration Linear and non-linear parameter estimation Known camera motion Camera attached to robot Execute several different motions Multiple Cameras

26 Example: Known world points vs. known camera motion
27 Classical Calibration
 Treat a point in the object as the World origin Points")
28 Classical Camera Calibration Take a known set of points. (Typically 3 orthogonal planes) Treat a point in the object as the World origin Points x1, x2, x3,. Project to y1,y2,y3,..
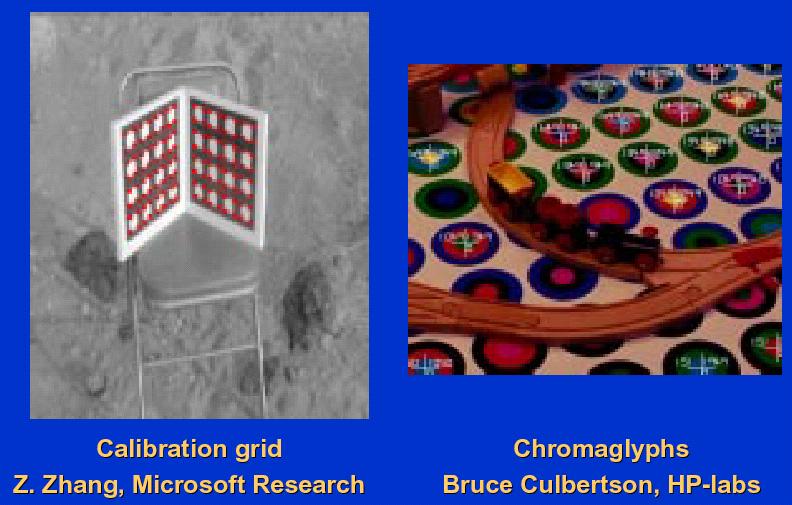
29 Calibration Patterns
30
31
32
33
34 Matlab code is simple Form the matrix P by appending each 3D point and the corresponding pixel locations in the arrangement given shown in the previous slide: P = [ Px1 Py1 Pz u1*px1 -u1*py1 -u1*pz1 -u1; Px1 Py1 Pz1 1 -v1*px1 -v1*py1 -v1*pz1 -v1; : : Pxn Pyn Pzn un*pxn -un*pyn -un*pzn -un; Pxn Pyn Pzn 1 -vn*pxn -vn*pyn -vn*pzn -vn]; Compute eigenanalysis on P *P [V,D]=eig(P *P); eigenvalues = diag(d); j = find(eigenvalues ==min(eigenvalues)); m=v(:,j);
35
36 Real Calibration Real calibration procedures look quite different Weight points by correspondence quality Nonlinear optimization Linearizations Non-linear distortions Etc.

37 Camera Motion

 8")


38 Calibration Example (Zhang, Microsoft) 8 Point matches manually picked Motion algorithm used to calibrate camera




39 Applications of Calibrated Cameras Image based rendering: Light field -- Hanrahan (Stanford)


40 Virtualized Reality

41 Projector-based VR UNC Chapel Hill

42 Shader Lamps
 Fully automatic procedure: Video in, VRML out.")

43 Is classical camera calibration necessary to to computer vision? NO. For example, Shape recovery without calibration (Fitzgibbons, Zisserman) Fully automatic procedure: Video in, VRML out. Allows for irregular motion: angle between views can vary, and it doesn't have to be known. Recovery of the angle is automatic, and accuracy is about 40 millidegrees standard deviation. No calibration targets: features on the objects themselves are used to determine where the camera is, relative to the turntable. Right shows a shape model automatically extracted from a dinosaur image sequence without any additional information. Camera parameters are determined as well.
44 NEXT: Measuring light in images Geometric: (what we ve been briefly covering) how positions in the image relate to 3-d positions in the world. Photometric/Radiometric: how the intensities in the image relate surface and lighting properties in the world.
Camera Parameters and Calibration
 Camera Parameters and Calibration Camera parameters U V W Ê Ë ˆ = Transformation representing intrinsic parameters Ê Ë ˆ Ê Ë ˆ Transformation representing extrinsic parameters Ê Ë ˆ X Y Z T Ê Ë ˆ From
Camera Parameters and Calibration Camera parameters U V W Ê Ë ˆ = Transformation representing intrinsic parameters Ê Ë ˆ Ê Ë ˆ Transformation representing extrinsic parameters Ê Ë ˆ X Y Z T Ê Ë ˆ From
Camera Model and Calibration
 Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-10 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Vision Review: Image Formation. Course web page:
 Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
Vision Review: Image Formation Course web page: www.cis.udel.edu/~cer/arv September 10, 2002 Announcements Lecture on Thursday will be about Matlab; next Tuesday will be Image Processing The dates some
CSE 252B: Computer Vision II
 CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
CSE 252B: Computer Vision II Lecturer: Serge Belongie Scribe: Sameer Agarwal LECTURE 1 Image Formation 1.1. The geometry of image formation We begin by considering the process of image formation when a
3D Geometry and Camera Calibration
 3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
3D Geometry and Camera Calibration 3D Coordinate Systems Right-handed vs. left-handed x x y z z y 2D Coordinate Systems 3D Geometry Basics y axis up vs. y axis down Origin at center vs. corner Will often
Computer Vision. Geometric Camera Calibration. Samer M Abdallah, PhD
 Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration September 2, 2004 1 Computer Vision Geometric Camera
Computer Vision Samer M Abdallah, PhD Faculty of Engineering and Architecture American University of Beirut Beirut, Lebanon Geometric Camera Calibration September 2, 2004 1 Computer Vision Geometric Camera
Camera Model and Calibration. Lecture-12
 Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Model and Calibration Lecture-12 Camera Calibration Determine extrinsic and intrinsic parameters of camera Extrinsic 3D location and orientation of camera Intrinsic Focal length The size of the
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu VisualFunHouse.com 3D Street Art Image courtesy: Julian Beaver (VisualFunHouse.com) 3D
Image Formation I Chapter 2 (R. Szelisky)
") Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
Image Formation I Chapter 2 (R. Selisky) Guido Gerig CS 632 Spring 22 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified from
3D Transformations. CS 4620 Lecture 10. Cornell CS4620 Fall 2014 Lecture Steve Marschner (with previous instructors James/Bala)
") 3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations CS 4620 Lecture 10 1 Translation 2 Scaling 3 Rotation about z axis 4 Rotation about x axis 5 Rotation about y axis 6 Properties of Matrices Translations: linear part is the identity
3D Transformations. CS 4620 Lecture Kavita Bala w/ prior instructor Steve Marschner. Cornell CS4620 Fall 2015 Lecture 11
 3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
3D Transformations CS 4620 Lecture 11 1 Announcements A2 due tomorrow Demos on Monday Please sign up for a slot Post on piazza 2 Translation 3 Scaling 4 Rotation about z axis 5 Rotation about x axis 6
UNIT 2 2D TRANSFORMATIONS
 UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
UNIT 2 2D TRANSFORMATIONS Introduction With the procedures for displaying output primitives and their attributes, we can create variety of pictures and graphs. In many applications, there is also a need
Camera Models and Image Formation. Srikumar Ramalingam School of Computing University of Utah
 Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Camera Models and Image Formation Srikumar Ramalingam School of Computing University of Utah srikumar@cs.utah.edu Reference Most slides are adapted from the following notes: Some lecture notes on geometric
Outline. ETN-FPI Training School on Plenoptic Sensing
 Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Outline Introduction Part I: Basics of Mathematical Optimization Linear Least Squares Nonlinear Optimization Part II: Basics of Computer Vision Camera Model Multi-Camera Model Multi-Camera Calibration
Geometric camera models and calibration
 Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometric camera models and calibration http://graphics.cs.cmu.edu/courses/15-463 15-463, 15-663, 15-862 Computational Photography Fall 2018, Lecture 13 Course announcements Homework 3 is out. - Due October
Geometry of image formation
 eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
eometry of image formation Tomáš Svoboda, svoboda@cmp.felk.cvut.cz Czech Technical University in Prague, Center for Machine Perception http://cmp.felk.cvut.cz Last update: November 3, 2008 Talk Outline
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Motivation Taken from: http://img.gawkerassets.com/img/18w7i1umpzoa9jpg/original.jpg
3D Sensing. 3D Shape from X. Perspective Geometry. Camera Model. Camera Calibration. General Stereo Triangulation.
 3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
3D Sensing 3D Shape from X Perspective Geometry Camera Model Camera Calibration General Stereo Triangulation 3D Reconstruction 3D Shape from X shading silhouette texture stereo light striping motion mainly
Humanoid Robotics. Projective Geometry, Homogeneous Coordinates. (brief introduction) Maren Bennewitz
 Maren Bennewitz") Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Humanoid Robotics Projective Geometry, Homogeneous Coordinates (brief introduction) Maren Bennewitz Motivation Cameras generate a projected image of the 3D world In Euclidian geometry, the math for describing
Geometric transformations in 3D and coordinate frames. Computer Graphics CSE 167 Lecture 3
 Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Geometric transformations in 3D and coordinate frames Computer Graphics CSE 167 Lecture 3 CSE 167: Computer Graphics 3D points as vectors Geometric transformations in 3D Coordinate frames CSE 167, Winter
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 215 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Geometric Transformations
 Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Geometric Transformations CS 4620 Lecture 9 2017 Steve Marschner 1 A little quick math background Notation for sets, functions, mappings Linear and affine transformations Matrices Matrix-vector multiplication
Pin Hole Cameras & Warp Functions
 Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
Pin Hole Cameras & Warp Functions Instructor - Simon Lucey 16-423 - Designing Computer Vision Apps Today Pinhole Camera. Homogenous Coordinates. Planar Warp Functions. Example of SLAM for AR Taken from:
EECS 4330/7330 Introduction to Mechatronics and Robotic Vision, Fall Lab 1. Camera Calibration
 1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
1 Lab 1 Camera Calibration Objective In this experiment, students will use stereo cameras, an image acquisition program and camera calibration algorithms to achieve the following goals: 1. Develop a procedure
Introduction to Computer Graphics 4. Viewing in 3D
 Introduction to Computer Graphics 4. Viewing in 3D National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor Textbook: E.Angel, Interactive Computer Graphics, 5 th Ed., Addison Wesley Ref: Hearn
Introduction to Computer Graphics 4. Viewing in 3D National Chiao Tung Univ, Taiwan By: I-Chen Lin, Assistant Professor Textbook: E.Angel, Interactive Computer Graphics, 5 th Ed., Addison Wesley Ref: Hearn
Rigid Body Motion and Image Formation. Jana Kosecka, CS 482
 Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Rigid Body Motion and Image Formation Jana Kosecka, CS 482 A free vector is defined by a pair of points : Coordinates of the vector : 1 3D Rotation of Points Euler angles Rotation Matrices in 3D 3 by 3
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Camera Calibration. COS 429 Princeton University
 Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
Camera Calibration COS 429 Princeton University Point Correspondences What can you figure out from point correspondences? Noah Snavely Point Correspondences X 1 X 4 X 3 X 2 X 5 X 6 X 7 p 1,1 p 1,2 p 1,3
3-D D Euclidean Space - Vectors
 3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
3-D D Euclidean Space - Vectors Rigid Body Motion and Image Formation A free vector is defined by a pair of points : Jana Kosecka http://cs.gmu.edu/~kosecka/cs682.html Coordinates of the vector : 3D Rotation
Specifying Complex Scenes
 Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Transformations Specifying Complex Scenes (x,y,z) (r x,r y,r z ) 2 (,,) Specifying Complex Scenes Absolute position is not very natural Need a way to describe relative relationship: The lego is on top
Agenda. Rotations. Camera models. Camera calibration. Homographies
 Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
Agenda Rotations Camera models Camera calibration Homographies D Rotations R Y = Z r r r r r r r r r Y Z Think of as change of basis where ri = r(i,:) are orthonormal basis vectors r rotated coordinate
2D/3D Geometric Transformations and Scene Graphs
 2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
2D/3D Geometric Transformations and Scene Graphs Week 4 Acknowledgement: The course slides are adapted from the slides prepared by Steve Marschner of Cornell University 1 A little quick math background
Object Representation Affine Transforms. Polygonal Representation. Polygonal Representation. Polygonal Representation of Objects
 Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
Object Representation Affine Transforms Polygonal Representation of Objects Although perceivable the simplest form of representation they can also be the most problematic. To represent an object polygonally,
An idea which can be used once is a trick. If it can be used more than once it becomes a method
 An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
An idea which can be used once is a trick. If it can be used more than once it becomes a method - George Polya and Gabor Szego University of Texas at Arlington Rigid Body Transformations & Generalized
CS230 : Computer Graphics Lecture 12: Introduction to Animation. Tamar Shinar Computer Science & Engineering UC Riverside
 CS230 : Computer Graphics Lecture 12: Introduction to Animation Tamar Shinar Computer Science & Engineering UC Riverside Types of animation keyframing rotoscoping stop motion procedural simulation motion
CS230 : Computer Graphics Lecture 12: Introduction to Animation Tamar Shinar Computer Science & Engineering UC Riverside Types of animation keyframing rotoscoping stop motion procedural simulation motion
Computer Vision cmput 428/615
 Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Computer Vision cmput 428/615 Basic 2D and 3D geometry and Camera models Martin Jagersand The equation of projection Intuitively: How do we develop a consistent mathematical framework for projection calculations?
Early Fundamentals of Coordinate Changes and Rotation Matrices for 3D Computer Vision
 Early Fundamentals of Coordinate Changes and Rotation Matrices for 3D Computer Vision Ricardo Fabbri Benjamin B. Kimia Brown University, Division of Engineering, Providence RI 02912, USA Based the first
Early Fundamentals of Coordinate Changes and Rotation Matrices for 3D Computer Vision Ricardo Fabbri Benjamin B. Kimia Brown University, Division of Engineering, Providence RI 02912, USA Based the first
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras
 Cameras") Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Image Formation I Chapter 1 (Forsyth&Ponce) Cameras Guido Gerig CS 632 Spring 213 cknowledgements: Slides used from Prof. Trevor Darrell, (http://www.eecs.berkeley.edu/~trevor/cs28.html) Some slides modified
Flexible Calibration of a Portable Structured Light System through Surface Plane
 Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Vol. 34, No. 11 ACTA AUTOMATICA SINICA November, 2008 Flexible Calibration of a Portable Structured Light System through Surface Plane GAO Wei 1 WANG Liang 1 HU Zhan-Yi 1 Abstract For a portable structured
Math background. 2D Geometric Transformations. Implicit representations. Explicit representations. Read: CS 4620 Lecture 6
 Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Math background 2D Geometric Transformations CS 4620 Lecture 6 Read: Chapter 2: Miscellaneous Math Chapter 5: Linear Algebra Notation for sets, functions, mappings Linear transformations Matrices Matrix-vector
Autonomous Navigation for Flying Robots
 Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
Computer Vision Group Prof. Daniel Cremers Autonomous Navigation for Flying Robots Lecture 3.1: 3D Geometry Jürgen Sturm Technische Universität München Points in 3D 3D point Augmented vector Homogeneous
1 Projective Geometry
 CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
CIS8, Machine Perception Review Problem - SPRING 26 Instructions. All coordinate systems are right handed. Projective Geometry Figure : Facade rectification. I took an image of a rectangular object, and
Short on camera geometry and camera calibration
 Short on camera geometry and camera calibration Maria Magnusson, maria.magnusson@liu.se Computer Vision Laboratory, Department of Electrical Engineering, Linköping University, Sweden Report No: LiTH-ISY-R-3070
Short on camera geometry and camera calibration Maria Magnusson, maria.magnusson@liu.se Computer Vision Laboratory, Department of Electrical Engineering, Linköping University, Sweden Report No: LiTH-ISY-R-3070
Lecture 9: Transformations. CITS3003 Graphics & Animation
 Lecture 9: Transformations CITS33 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 212 Objectives Introduce standard transformations Rotation Translation Scaling
Lecture 9: Transformations CITS33 Graphics & Animation E. Angel and D. Shreiner: Interactive Computer Graphics 6E Addison-Wesley 212 Objectives Introduce standard transformations Rotation Translation Scaling
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II
 Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
Massachusetts Institute of Technology Department of Computer Science and Electrical Engineering 6.801/6.866 Machine Vision QUIZ II Handed out: 001 Nov. 30th Due on: 001 Dec. 10th Problem 1: (a (b Interior
2D transformations: An introduction to the maths behind computer graphics
 2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
2D transformations: An introduction to the maths behind computer graphics Lecturer: Dr Dan Cornford d.cornford@aston.ac.uk http://wiki.aston.ac.uk/dancornford CS2150, Computer Graphics, Aston University,
Image Transformations & Camera Calibration. Mašinska vizija, 2018.
 Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Image Transformations & Camera Calibration Mašinska vizija, 2018. Image transformations What ve we learnt so far? Example 1 resize and rotate Open warp_affine_template.cpp Perform simple resize
Overview. Viewing and perspectives. Planar Geometric Projections. Classical Viewing. Classical views Computer viewing Perspective normalization
 Overview Viewing and perspectives Classical views Computer viewing Perspective normalization Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface
Overview Viewing and perspectives Classical views Computer viewing Perspective normalization Classical Viewing Viewing requires three basic elements One or more objects A viewer with a projection surface
Vector Algebra Transformations. Lecture 4
 Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Vector Algebra Transformations Lecture 4 Cornell CS4620 Fall 2008 Lecture 4 2008 Steve Marschner 1 Geometry A part of mathematics concerned with questions of size, shape, and relative positions of figures
Cameras and Radiometry. Last lecture in a nutshell. Conversion Euclidean -> Homogenous -> Euclidean. Affine Camera Model. Simplified Camera Models
 Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
Cameras and Radiometry Last lecture in a nutshell CSE 252A Lecture 5 Conversion Euclidean -> Homogenous -> Euclidean In 2-D Euclidean -> Homogenous: (x, y) -> k (x,y,1) Homogenous -> Euclidean: (x, y,
CV: 3D sensing and calibration
 CV: 3D sensing and calibration Coordinate system changes; perspective transformation; Stereo and structured light MSU CSE 803 1 roadmap using multiple cameras using structured light projector 3D transformations
CV: 3D sensing and calibration Coordinate system changes; perspective transformation; Stereo and structured light MSU CSE 803 1 roadmap using multiple cameras using structured light projector 3D transformations
Perspective projection and Transformations
 Perspective projection and Transformations The pinhole camera The pinhole camera P = (X,,) p = (x,y) O λ = 0 Q λ = O λ = 1 Q λ = P =-1 Q λ X = 0 + λ X 0, 0 + λ 0, 0 + λ 0 = (λx, λ, λ) The pinhole camera
Perspective projection and Transformations The pinhole camera The pinhole camera P = (X,,) p = (x,y) O λ = 0 Q λ = O λ = 1 Q λ = P =-1 Q λ X = 0 + λ X 0, 0 + λ 0, 0 + λ 0 = (λx, λ, λ) The pinhole camera
Metric Structure from Motion
 CS443 Final Project Metric Structure from Motion Peng Cheng 1 Objective of the Project Given: 1. A static object with n feature points and unknown shape. 2. A camera with unknown intrinsic parameters takes
CS443 Final Project Metric Structure from Motion Peng Cheng 1 Objective of the Project Given: 1. A static object with n feature points and unknown shape. 2. A camera with unknown intrinsic parameters takes
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
AH Matrices.notebook November 28, 2016
 Matrices Numbers are put into arrays to help with multiplication, division etc. A Matrix (matrices pl.) is a rectangular array of numbers arranged in rows and columns. Matrices If there are m rows and
Matrices Numbers are put into arrays to help with multiplication, division etc. A Matrix (matrices pl.) is a rectangular array of numbers arranged in rows and columns. Matrices If there are m rows and
Transforms. COMP 575/770 Spring 2013
 Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
Transforms COMP 575/770 Spring 2013 Transforming Geometry Given any set of points S Could be a 2D shape, a 3D object A transform is a function T that modifies all points in S: T S S T v v S Different transforms
calibrated coordinates Linear transformation pixel coordinates
 1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
1 calibrated coordinates Linear transformation pixel coordinates 2 Calibration with a rig Uncalibrated epipolar geometry Ambiguities in image formation Stratified reconstruction Autocalibration with partial
Geometry: Outline. Projections. Orthographic Perspective
 Geometry: Cameras Outline Setting up the camera Projections Orthographic Perspective 1 Controlling the camera Default OpenGL camera: At (0, 0, 0) T in world coordinates looking in Z direction with up vector
Geometry: Cameras Outline Setting up the camera Projections Orthographic Perspective 1 Controlling the camera Default OpenGL camera: At (0, 0, 0) T in world coordinates looking in Z direction with up vector
Mysteries of Parameterizing Camera Motion - Part 1
 Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
Mysteries of Parameterizing Camera Motion - Part 1 Instructor - Simon Lucey 16-623 - Advanced Computer Vision Apps Today Motivation SO(3) Convex? Exponential Maps SL(3) Group. Adapted from: Computer vision:
COSC579: Scene Geometry. Jeremy Bolton, PhD Assistant Teaching Professor
 COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
COSC579: Scene Geometry Jeremy Bolton, PhD Assistant Teaching Professor Overview Linear Algebra Review Homogeneous vs non-homogeneous representations Projections and Transformations Scene Geometry The
So we have been talking about 3D viewing, the transformations pertaining to 3D viewing. Today we will continue on it. (Refer Slide Time: 1:15)
") Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 8 3D Viewing So we have been talking about 3D viewing, the
Introduction to Computer Graphics Dr. Prem Kalra Department of Computer Science and Engineering Indian Institute of Technology, Delhi Lecture - 8 3D Viewing So we have been talking about 3D viewing, the
CS 4204 Computer Graphics
 CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
CS 4204 Computer Graphics 3D Viewing and Projection Yong Cao Virginia Tech Objective We will develop methods to camera through scenes. We will develop mathematical tools to handle perspective projection.
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES
 CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
CALCULATING TRANSFORMATIONS OF KINEMATIC CHAINS USING HOMOGENEOUS COORDINATES YINGYING REN Abstract. In this paper, the applications of homogeneous coordinates are discussed to obtain an efficient model
Camera calibration. Robotic vision. Ville Kyrki
 Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Camera calibration Robotic vision 19.1.2017 Where are we? Images, imaging Image enhancement Feature extraction and matching Image-based tracking Camera models and calibration Pose estimation Motion analysis
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
CITSTUDENTS.IN VIEWING. Computer Graphics and Visualization. Classical and computer viewing. Viewing with a computer. Positioning of the camera
 UNIT - 6 7 hrs VIEWING Classical and computer viewing Viewing with a computer Positioning of the camera Simple projections Projections in OpenGL Hiddensurface removal Interactive mesh displays Parallelprojection
UNIT - 6 7 hrs VIEWING Classical and computer viewing Viewing with a computer Positioning of the camera Simple projections Projections in OpenGL Hiddensurface removal Interactive mesh displays Parallelprojection
Two-view geometry Computer Vision Spring 2018, Lecture 10
 Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Two-view geometry http://www.cs.cmu.edu/~16385/ 16-385 Computer Vision Spring 2018, Lecture 10 Course announcements Homework 2 is due on February 23 rd. - Any questions about the homework? - How many of
Rotations (and other transformations) Rotation as rotation matrix. Storage. Apply to vector matrix vector multiply (15 flops)
 Rotation as rotation matrix. Storage. Apply to vector matrix vector multiply (15 flops)") Cornell University CS 569: Interactive Computer Graphics Rotations (and other transformations) Lecture 4 2008 Steve Marschner 1 Rotation as rotation matrix 9 floats orthogonal and unit length columns and
Cornell University CS 569: Interactive Computer Graphics Rotations (and other transformations) Lecture 4 2008 Steve Marschner 1 Rotation as rotation matrix 9 floats orthogonal and unit length columns and
Three-Dimensional Graphics III. Guoying Zhao 1 / 67
 Computer Graphics Three-Dimensional Graphics III Guoying Zhao 1 / 67 Classical Viewing Guoying Zhao 2 / 67 Objectives Introduce the classical views Compare and contrast image formation by computer with
Computer Graphics Three-Dimensional Graphics III Guoying Zhao 1 / 67 Classical Viewing Guoying Zhao 2 / 67 Objectives Introduce the classical views Compare and contrast image formation by computer with
Stereo Image Rectification for Simple Panoramic Image Generation
 Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Stereo Image Rectification for Simple Panoramic Image Generation Yun-Suk Kang and Yo-Sung Ho Gwangju Institute of Science and Technology (GIST) 261 Cheomdan-gwagiro, Buk-gu, Gwangju 500-712 Korea Email:{yunsuk,
Advanced Computer Graphics Transformations. Matthias Teschner
 Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Advanced Computer Graphics Transformations Matthias Teschner Motivation Transformations are used To convert between arbitrary spaces, e.g. world space and other spaces, such as object space, camera space
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Stereo Vision. MAN-522 Computer Vision
 Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Stereo Vision MAN-522 Computer Vision What is the goal of stereo vision? The recovery of the 3D structure of a scene using two or more images of the 3D scene, each acquired from a different viewpoint in
Rectification and Distortion Correction
 Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
Rectification and Distortion Correction Hagen Spies March 12, 2003 Computer Vision Laboratory Department of Electrical Engineering Linköping University, Sweden Contents Distortion Correction Rectification
CS231A. Review for Problem Set 1. Saumitro Dasgupta
 CS231A Review for Problem Set 1 Saumitro Dasgupta On today's menu Camera Model Rotation Matrices Homogeneous Coordinates Vanishing Points Matrix Calculus Constrained Optimization Camera Calibration Demo
CS231A Review for Problem Set 1 Saumitro Dasgupta On today's menu Camera Model Rotation Matrices Homogeneous Coordinates Vanishing Points Matrix Calculus Constrained Optimization Camera Calibration Demo
Project 4 Results. Representation. Data. Learning. Zachary, Hung-I, Paul, Emanuel. SIFT and HoG are popular and successful.
 Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Project 4 Results Representation SIFT and HoG are popular and successful. Data Hugely varying results from hard mining. Learning Non-linear classifier usually better. Zachary, Hung-I, Paul, Emanuel Project
Motivation. Parametric Curves (later Surfaces) Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)
 Outline. Tangents, Normals, Binormals. Arclength. Advanced Computer Graphics (Fall 2010)") Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Advanced Computer Graphics (Fall 2010) CS 283, Lecture 19: Basic Geometric Concepts and Rotations Ravi Ramamoorthi http://inst.eecs.berkeley.edu/~cs283/fa10 Motivation Moving from rendering to simulation,
Monday, 12 November 12. Matrices
 Matrices Matrices Matrices are convenient way of storing multiple quantities or functions They are stored in a table like structure where each element will contain a numeric value that can be the result
Matrices Matrices Matrices are convenient way of storing multiple quantities or functions They are stored in a table like structure where each element will contain a numeric value that can be the result
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision 0
 CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find a
CSE152a Computer Vision Assignment 1 WI14 Instructor: Prof. David Kriegman. Revision Instructions: This assignment should be solved, and written up in groups of 2. Work alone only if you can not find a
Computer Vision Projective Geometry and Calibration. Pinhole cameras
 Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
Computer Vision Projective Geometry and Calibration Professor Hager http://www.cs.jhu.edu/~hager Jason Corso http://www.cs.jhu.edu/~jcorso. Pinhole cameras Abstract camera model - box with a small hole
GEOMETRIC TRANSFORMATIONS AND VIEWING
 GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
GEOMETRIC TRANSFORMATIONS AND VIEWING 2D and 3D 1/44 2D TRANSFORMATIONS HOMOGENIZED Transformation Scaling Rotation Translation Matrix s x s y cosθ sinθ sinθ cosθ 1 dx 1 dy These 3 transformations are
HW 1: Project Report (Camera Calibration)
") HW 1: Project Report (Camera Calibration) ABHISHEK KUMAR (abhik@sci.utah.edu) 1 Problem The problem is to calibrate a camera for a fixed focal length using two orthogonal checkerboard planes, and to find
HW 1: Project Report (Camera Calibration) ABHISHEK KUMAR (abhik@sci.utah.edu) 1 Problem The problem is to calibrate a camera for a fixed focal length using two orthogonal checkerboard planes, and to find
Homogeneous Coordinates. Lecture18: Camera Models. Representation of Line and Point in 2D. Cross Product. Overall scaling is NOT important.
 Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Homogeneous Coordinates Overall scaling is NOT important. CSED44:Introduction to Computer Vision (207F) Lecture8: Camera Models Bohyung Han CSE, POSTECH bhhan@postech.ac.kr (",, ) ()", ), )) ) 0 It is
Visual Recognition: Image Formation
 Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
Visual Recognition: Image Formation Raquel Urtasun TTI Chicago Jan 5, 2012 Raquel Urtasun (TTI-C) Visual Recognition Jan 5, 2012 1 / 61 Today s lecture... Fundamentals of image formation You should know
The real voyage of discovery consists not in seeking new landscapes, but in having new eyes.
 The real voyage of discovery consists not in seeking new landscapes, but in having new eyes. - Marcel Proust University of Texas at Arlington Camera Calibration (or Resectioning) CSE 4392-5369 Vision-based
The real voyage of discovery consists not in seeking new landscapes, but in having new eyes. - Marcel Proust University of Texas at Arlington Camera Calibration (or Resectioning) CSE 4392-5369 Vision-based
Week 2: Two-View Geometry. Padua Summer 08 Frank Dellaert
 Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
Week 2: Two-View Geometry Padua Summer 08 Frank Dellaert Mosaicking Outline 2D Transformation Hierarchy RANSAC Triangulation of 3D Points Cameras Triangulation via SVD Automatic Correspondence Essential
ME5286 Robotics Spring 2014 Quiz 1 Solution. Total Points: 30
 Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Page 1 of 7 ME5286 Robotics Spring 2014 Quiz 1 Solution Total Points: 30 (Note images from original quiz are not included to save paper/ space. Please see the original quiz for additional information and
Today. Today. Introduction. Matrices. Matrices. Computergrafik. Transformations & matrices Introduction Matrices
 Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
Computergrafik Matthias Zwicker Universität Bern Herbst 2008 Today Transformations & matrices Introduction Matrices Homogeneous Affine transformations Concatenating transformations Change of Common coordinate
To Do. Outline. Translation. Homogeneous Coordinates. Foundations of Computer Graphics. Representation of Points (4-Vectors) Start doing HW 1
 Start doing HW 1") Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
Foundations of Computer Graphics Homogeneous Coordinates Start doing HW 1 To Do Specifics of HW 1 Last lecture covered basic material on transformations in 2D Likely need this lecture to understand full
Agenda. Rotations. Camera calibration. Homography. Ransac
 Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Agenda Rotations Camera calibration Homography Ransac Geometric Transformations y x Transformation Matrix # DoF Preserves Icon translation rigid (Euclidean) similarity affine projective h I t h R t h sr
Projector Calibration for Pattern Projection Systems
 Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
Projector Calibration for Pattern Projection Systems I. Din *1, H. Anwar 2, I. Syed 1, H. Zafar 3, L. Hasan 3 1 Department of Electronics Engineering, Incheon National University, Incheon, South Korea.
CHAPTER 3. Single-view Geometry. 1. Consequences of Projection
 CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
CHAPTER 3 Single-view Geometry When we open an eye or take a photograph, we see only a flattened, two-dimensional projection of the physical underlying scene. The consequences are numerous and startling.
Planar homographies. Can we reconstruct another view from one image? vgg/projects/singleview/
 Planar homographies Goal: Introducing 2D Homographies Motivation: What is the relation between a plane in the world and a perspective image of it? Can we reconstruct another view from one image? Readings:
Planar homographies Goal: Introducing 2D Homographies Motivation: What is the relation between a plane in the world and a perspective image of it? Can we reconstruct another view from one image? Readings:
3D Geometry and Camera Calibration
 3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
3D Geometr and Camera Calibration 3D Coordinate Sstems Right-handed vs. left-handed 2D Coordinate Sstems ais up vs. ais down Origin at center vs. corner Will often write (u, v) for image coordinates v
3D Polygon Rendering. Many applications use rendering of 3D polygons with direct illumination
 Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Rendering Pipeline 3D Polygon Rendering Many applications use rendering of 3D polygons with direct illumination 3D Polygon Rendering What steps are necessary to utilize spatial coherence while drawing
Comments on Consistent Depth Maps Recovery from a Video Sequence
 Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Comments on Consistent Depth Maps Recovery from a Video Sequence N.P. van der Aa D.S. Grootendorst B.F. Böggemann R.T. Tan Technical Report UU-CS-2011-014 May 2011 Department of Information and Computing
Image Formation. Antonino Furnari. Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania
 Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Image Formation Antonino Furnari Image Processing Lab Dipartimento di Matematica e Informatica Università degli Studi di Catania furnari@dmi.unict.it 18/03/2014 Outline Introduction; Geometric Primitives
Stereo II CSE 576. Ali Farhadi. Several slides from Larry Zitnick and Steve Seitz
 Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world
Stereo II CSE 576 Ali Farhadi Several slides from Larry Zitnick and Steve Seitz Camera parameters A camera is described by several parameters Translation T of the optical center from the origin of world