Fitting. Lecture 8. Cristian Sminchisescu. Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce
|
|
|
- Antony Townsend
- 5 years ago
- Views:
Transcription
1 Fitting Lecture 8 Cristian Sminchisescu Slide credits: K. Grauman, S. Seitz, S. Lazebnik, D. Forsyth, J. Ponce


![2007] For example, the](/docs-images/91/104666366/images/2-2.jpg "model could be a line, a")


2 Fitting We want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For example, the model could be a line, a circle, or an arbitrary shape. We use a model to produce compact representations that capture the relevant image structures we seek.



3 Example: Line fitting Why fit lines? Many objects characterized by presence of straight lines
4
5
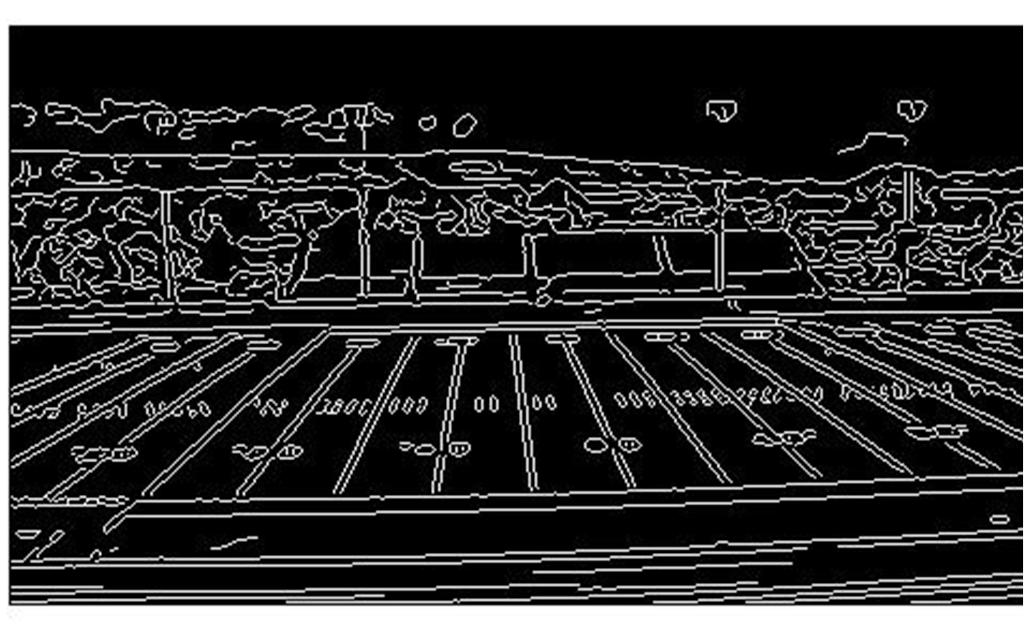
6 Example: Line fitting Why fit lines? Many objects characterized by presence of straight lines Why aren t we done just by running edge detection?


7 Difficulty of line fitting Extra edge points (clutter), multiple models: which points go with which line, if any? Only some parts of each line detected, and some parts are missing: how to find a line that bridges missing evidence? Noise in measured edge points, orientations: how to detect true underlying parameters?
8 Voting It is not easy to check all combinations of features by fitting a model to each possible subset (but see later RANSAC) Voting is a general technique where we let the features vote for all models that are compatible with them Cycle through features, cast votes for model parameters. Look for model parameters that receive a lot of votes. Noise and clutter features will cast votes too, but typically their votes should be inconsistent with the majority of good features. Hence they will have less support. Ok if some features not observed, as model can span multiple fragments. The voting process is distributed (each individual feature casts a vote for a possible model, so they can work independently)
9 Hough transform algorithm Using the polar parameterization: x cos y sin H: accumulator array (votes) Basic Hough transform algorithm 1. Initialize H[, ]=0 2. for each edge point I[x,y] in the image for = 0 to 180 // some quantization x cos H[, ] += 1 y sin 3. Find the value(s) of (, ) where H[, ] is maximum 4. The detected line in the image is given by x cos y sin Complexity (in terms of number of votes)? Source: Steve Seitz

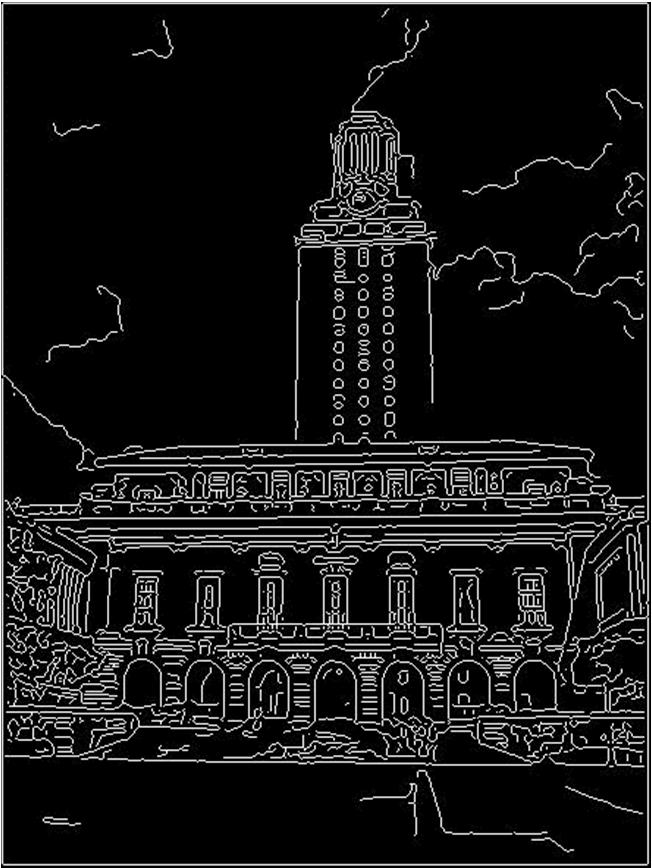
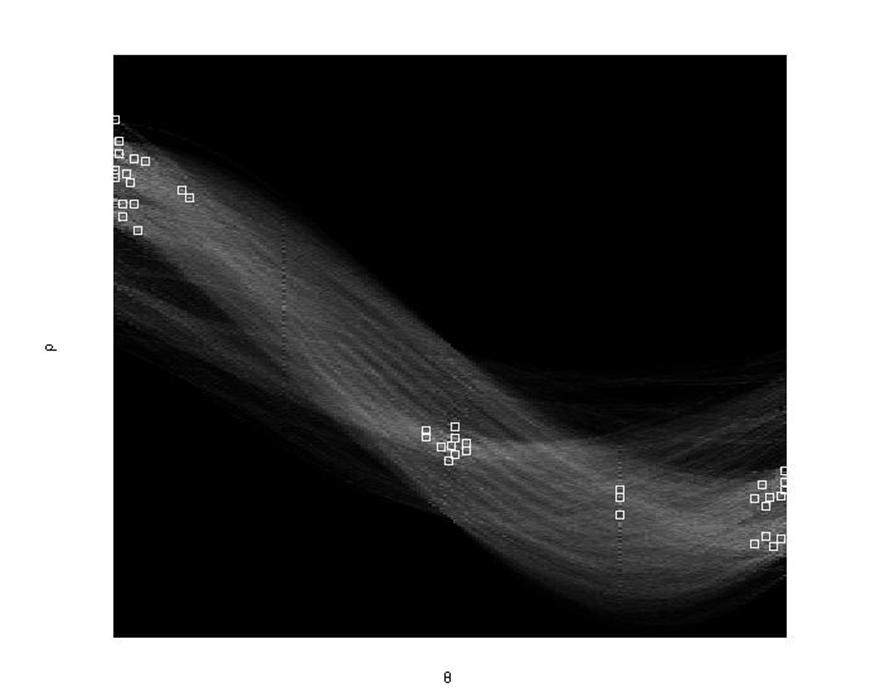
10 tokens Note that most points in the vote array are very dark, because they get only one vote.
11 tokens votes What difficulty does this present for an implementation?

12 tokens votes Here, everything appears to be noise, or random edge points, but we still see peaks in the vote space.
![Extensions Extension 1: Use the image gradient 1. same 2. for each edge point I[x,y] in the image = gradient at (x,y) x cos y sin H[, ] += 1 3. same 4.](/docs-images/91/104666366/images/13-0.jpg "same (Reduces degrees of freedom) Extension 2 give more votes for stronger edges Extension 3 change the sampling of (d, ) to give more/less resolution Extension 4 The same procedure can be used")
13 Extensions Extension 1: Use the image gradient 1. same 2. for each edge point I[x,y] in the image = gradient at (x,y) x cos y sin H[, ] += 1 3. same 4. same (Reduces degrees of freedom) Extension 2 give more votes for stronger edges Extension 3 change the sampling of (d, ) to give more/less resolution Extension 4 The same procedure can be used with circles, squares, or any other shape
14 Extensions Extension 1: Use the image gradient 1. same 2. for each edge point I[x,y] in the image compute unique (, ) based on image gradient at (x,y) H[, ] += 1 3. same 4. same (Reduces degrees of freedom) Extension 2 give more votes for stronger edges (use magnitude of gradient) Extension 3 change the sampling of (, ) to give more/less resolution Extension 4 The same procedure can be used with circles, squares, or any other shape
15



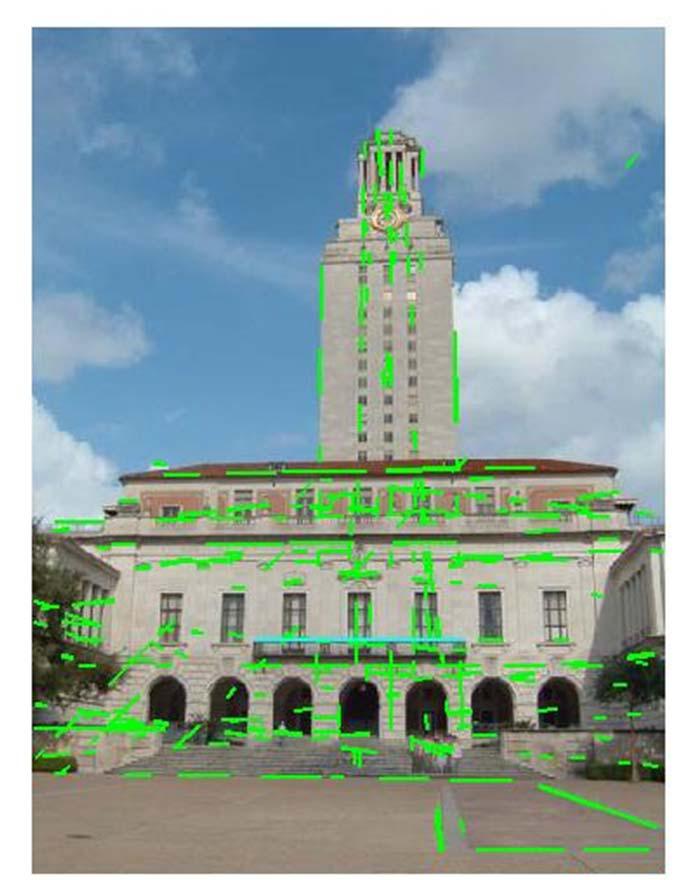
16 Showing longest segments found
17 Voting: practical tips Minimize irrelevant tokens first (take edge points with significant gradient magnitude) Choose a good grid / discretization Too coarse: large votes obtained when too many different lines correspond to a single bucket Too fine: miss lines because some points that are not exactly collinear cast votes for different buckets Vote for neighbors, also (smoothing in accumulator array) To read back which points voted for winning peaks, keep tags on the votes.
18 Hough transform: pros and cons Pros All points are processed independently, so can cope with occlusion Some robustness to noise: noise points unlikely to contribute consistently to any single bin Can detect multiple instances of a model in a single pass Cons Complexity of search time increases exponentially with the number of model parameters Non target shapes can produce spurious peaks in parameter space Quantization: hard to pick a good grid size
19 Generalized Hough transform To detect the model shape in a new image: For each edge point Index into table with its gradient orientation θ Use retrieved r vectors to vote for position of reference point Peak in this Hough space is reference point with most supporting edges Assuming translation is the only transformation here, i.e., orientation and scale are fixed.
20 Example Say we ve already stored a table of displacement vectors as a function of edge orientation for this model shape. model shape Source: L. Lazebnik
21 Example Now we want to look at some edge points detected in a new image, and vote on the position of that shape. displacement vectors for model points
22 Example range of voting locations for test point
23 Example range of voting locations for test point
24 Example votes for points with θ =
25 Example displacement vectors for model points
26 Example range of voting locations for test point
27 Example votes for points with θ =
28
29

30
31
32 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
33 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
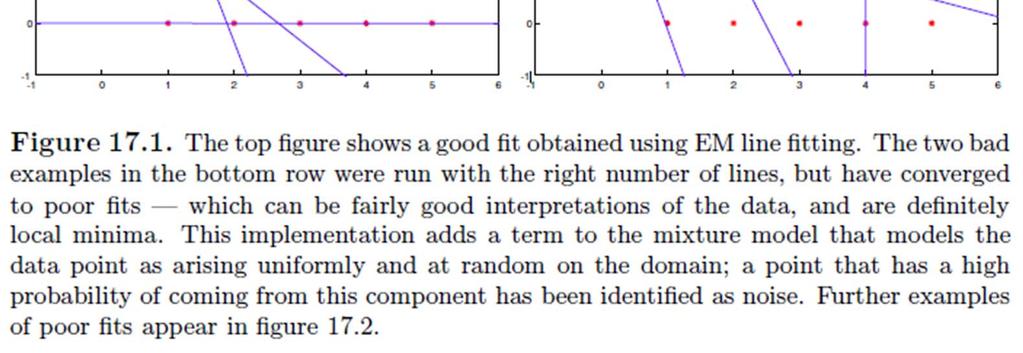
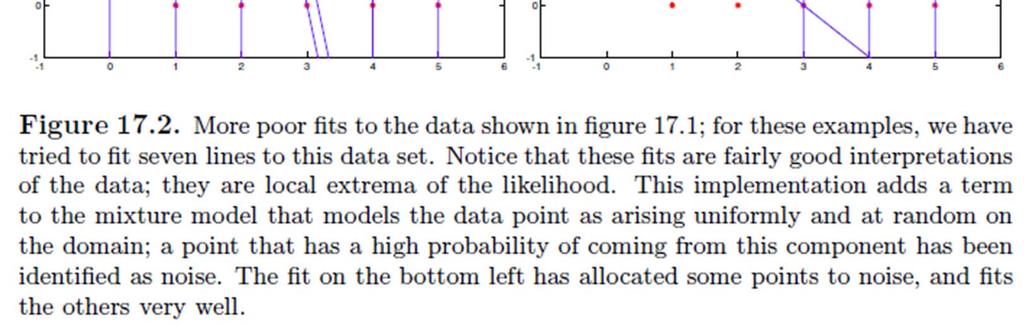
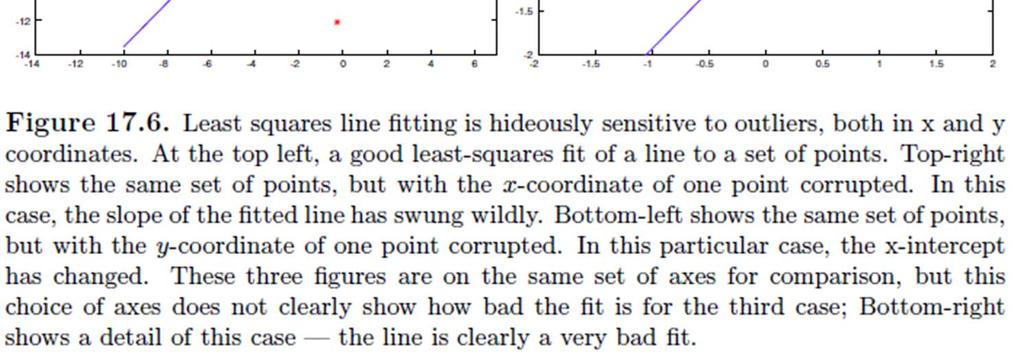
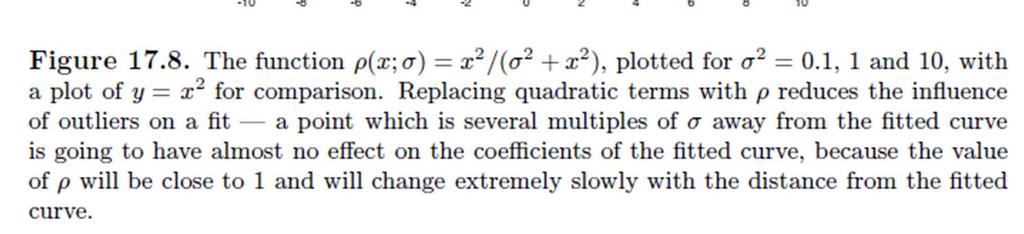
34 Robustness As we have seen, squared error can be a source of bias in the presence of noise points One fix is EM we ll do this shortly Another is an M estimator Square nearby, threshold far away A third is RANSAC Search for good points Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
35 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
36 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
37 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
38 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
39 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
40 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
41 Too small Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
42 Too large Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
43 Computer Vision A Modern Approach Set: Fitting Slides by D.A. Forsyth
44
45 as the noise increases in a picture without a line, the number of points in the max cell goes up, too
Finding 2D Shapes and the Hough Transform
 CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
CS 4495 Computer Vision Finding 2D Shapes and the Aaron Bobick School of Interactive Computing Administrivia Today: Modeling Lines and Finding them CS4495: Problem set 1 is still posted. Please read the
Lecture 9: Hough Transform and Thresholding base Segmentation
 #1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
#1 Lecture 9: Hough Transform and Thresholding base Segmentation Saad Bedros sbedros@umn.edu Hough Transform Robust method to find a shape in an image Shape can be described in parametric form A voting
Fitting: Voting and the Hough Transform April 23 rd, Yong Jae Lee UC Davis
 Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Fitting: Voting and the Hough Transform April 23 rd, 2015 Yong Jae Lee UC Davis Last time: Grouping Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features,
Lecture 8: Fitting. Tuesday, Sept 25
 Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 8: Fitting Tuesday, Sept 25 Announcements, schedule Grad student extensions Due end of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Lecture 4: Finding lines: from detection to model fitting
 Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Lecture 4: Finding lines: from detection to model fitting Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today Edge detection Canny edge detector Line fitting Hough Transform RANSAC (Problem
Announcements, schedule. Lecture 8: Fitting. Weighted graph representation. Outline. Segmentation by Graph Cuts. Images as graphs
 Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Announcements, schedule Lecture 8: Fitting Tuesday, Sept 25 Grad student etensions Due of term Data sets, suggestions Reminder: Midterm Tuesday 10/9 Problem set 2 out Thursday, due 10/11 Outline Review
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform
 Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Fitting: The Hough transform Voting schemes Let each feature vote for all the models that are compatible with it Hopefully the noise features will not vote consistently for any single model Missing data
Example: Line fitting. Difficulty of line fitting. Fitting lines. Fitting lines. Fitting lines. Voting 9/22/2009
 Histograms in Matla Fitting: Voting and the Hough Transform Tuesda, Sept Kristen Grauman UT-Austin a = A(:); % reshapes matri A into vector, columns first H = hist(a(:), 10); %t takes a histogram from
Histograms in Matla Fitting: Voting and the Hough Transform Tuesda, Sept Kristen Grauman UT-Austin a = A(:); % reshapes matri A into vector, columns first H = hist(a(:), 10); %t takes a histogram from
Straight Lines and Hough
 09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
09/30/11 Straight Lines and Hough Computer Vision CS 143, Brown James Hays Many slides from Derek Hoiem, Lana Lazebnik, Steve Seitz, David Forsyth, David Lowe, Fei-Fei Li Project 1 A few project highlights
Model Fitting: The Hough transform I
 Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Model Fitting: The Hough transform I Guido Gerig, CS6640 Image Processing, Utah Credit: Svetlana Lazebnik (Computer Vision UNC Chapel Hill, 2008) Fitting Parametric Models: Beyond Lines Choose a parametric
Prof. Kristen Grauman
 Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
Fitting Prof. Kristen Grauman UT Austin Fitting Want to associate a model with observed features [Fig from Marszalek & Schmid, 2007] For eample, the model could be a line, a circle, or an arbitrary shape.
HOUGH TRANSFORM CS 6350 C V
 HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
HOUGH TRANSFORM CS 6350 C V HOUGH TRANSFORM The problem: Given a set of points in 2-D, find if a sub-set of these points, fall on a LINE. Hough Transform One powerful global method for detecting edges
Fitting. Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local
 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on a line by looking only at each
Edge Detection. CSE 576 Ali Farhadi. Many slides from Steve Seitz and Larry Zitnick
 Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection CSE 576 Ali Farhadi Many slides from Steve Seitz and Larry Zitnick Edge Attneave's Cat (1954) Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity
Edge Detection. EE/CSE 576 Linda Shapiro
 Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Edge Detection EE/CSE 576 Linda Shapiro Edge Attneave's Cat (1954) 2 Origin of edges surface normal discontinuity depth discontinuity surface color discontinuity illumination discontinuity Edges are caused
Model Fitting: The Hough transform II
 Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
Model Fitting: The Hough transform II Guido Gerig, CS6640 Image Processing, Utah Theory: See handwritten notes GG: HT-notes-GG-II.pdf Credits: S. Narasimhan, CMU, Spring 2006 15-385,-685, Link Svetlana
EECS 442 Computer vision. Fitting methods
 EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
EECS 442 Computer vision Fitting methods - Problem formulation - Least square methods - RANSAC - Hough transforms - Multi-model fitting - Fitting helps matching! Reading: [HZ] Chapters: 4, 11 [FP] Chapters:
Edge Detection. Announcements. Edge detection. Origin of Edges. Mailing list: you should have received messages
 Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements Mailing list: csep576@cs.washington.edu you should have received messages Project 1 out today (due in two weeks) Carpools Edge Detection From Sandlot Science Today s reading Forsyth, chapters
Announcements. Edges. Last Lecture. Gradients: Numerical Derivatives f(x) Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10
 Edge Detection, Lines. Intro Computer Vision. CSE 152 Lecture 10") Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Announcements Assignment 2 due Tuesday, May 4. Edge Detection, Lines Midterm: Thursday, May 6. Introduction to Computer Vision CSE 152 Lecture 10 Edges Last Lecture 1. Object boundaries 2. Surface normal
Hough Transform and RANSAC
 CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
CS4501: Introduction to Computer Vision Hough Transform and RANSAC Various slides from previous courses by: D.A. Forsyth (Berkeley / UIUC), I. Kokkinos (Ecole Centrale / UCL). S. Lazebnik (UNC / UIUC),
Elaborazione delle Immagini Informazione Multimediale. Raffaella Lanzarotti
 Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
Elaborazione delle Immagini Informazione Multimediale Raffaella Lanzarotti HOUGH TRANSFORM Paragraph 4.3.2 of the book at link: szeliski.org/book/drafts/szeliskibook_20100903_draft.pdf Thanks to Kristen
Lecture 15: Segmentation (Edge Based, Hough Transform)
") Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Lecture 15: Segmentation (Edge Based, Hough Transform) c Bryan S. Morse, Brigham Young University, 1998 000 Last modified on February 3, 000 at :00 PM Contents 15.1 Introduction..............................................
Fitting D.A. Forsyth, CS 543
 Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Fitting D.A. Forsyth, CS 543 Fitting Choose a parametric object/some objects to represent a set of tokens Most interesting case is when criterion is not local can t tell whether a set of points lies on
Computer Vision Lecture 6
 Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Computer Vision Lecture 6 Segmentation 12.11.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Course Outline Image Processing Basics Structure Extraction Segmentation
Computer Vision 6 Segmentation by Fitting
 Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Computer Vision 6 Segmentation by Fitting MAP-I Doctoral Programme Miguel Tavares Coimbra Outline The Hough Transform Fitting Lines Fitting Curves Fitting as a Probabilistic Inference Problem Acknowledgements:
Lecture: RANSAC and feature detectors
 Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Lecture: RANSAC and feature detectors Juan Carlos Niebles and Ranjay Krishna Stanford Vision and Learning Lab 1 What we will learn today? A model fitting method for edge detection RANSAC Local invariant
Feature Matching and Robust Fitting
 Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Feature Matching and Robust Fitting Computer Vision CS 143, Brown Read Szeliski 4.1 James Hays Acknowledgment: Many slides from Derek Hoiem and Grauman&Leibe 2008 AAAI Tutorial Project 2 questions? This
Fitting: Voting and the Hough Transform
 Last time: Grouping Fitting: Voting and the Hough Transform Monda, Fe 14 Prof. UT Austin Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features, affinit functions,
Last time: Grouping Fitting: Voting and the Hough Transform Monda, Fe 14 Prof. UT Austin Bottom-up segmentation via clustering To find mid-level regions, tokens General choices -- features, affinit functions,
Other Linear Filters CS 211A
 Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Other Linear Filters CS 211A Slides from Cornelia Fermüller and Marc Pollefeys Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin
Edge detection. Convert a 2D image into a set of curves. Extracts salient features of the scene More compact than pixels
 Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Edge Detection Edge detection Convert a 2D image into a set of curves Extracts salient features of the scene More compact than pixels Origin of Edges surface normal discontinuity depth discontinuity surface
Lecture 9 Fitting and Matching
 Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 9 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi- model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Feature Detectors and Descriptors: Corners, Lines, etc.
 Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Feature Detectors and Descriptors: Corners, Lines, etc. Edges vs. Corners Edges = maxima in intensity gradient Edges vs. Corners Corners = lots of variation in direction of gradient in a small neighborhood
Lecture 8 Fitting and Matching
 Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Lecture 8 Fitting and Matching Problem formulation Least square methods RANSAC Hough transforms Multi-model fitting Fitting helps matching! Reading: [HZ] Chapter: 4 Estimation 2D projective transformation
Fitting. Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!
! web.eecs.umich.edu/~jjcorso/t/598f14!! EECS Fall 2014! Foundations of Computer Vision!") Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Fitting EECS 598-08 Fall 2014! Foundations of Computer Vision!! Instructor: Jason Corso (jjcorso)! web.eecs.umich.edu/~jjcorso/t/598f14!! Readings: FP 10; SZ 4.3, 5.1! Date: 10/8/14!! Materials on these
Computer Vision Lecture 6
 Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
Course Outline Computer Vision Lecture 6 Segmentation Image Processing Basics Structure Extraction Segmentation Segmentation as Clustering Graph-theoretic Segmentation 12.11.2015 Recognition Global Representations
CPSC 425: Computer Vision
 1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
1 / 45 CPSC 425: Computer Vision Instructor: Fred Tung ftung@cs.ubc.ca Department of Computer Science University of British Columbia Lecture Notes 2015/2016 Term 2 2 / 45 Menu March 3, 2016 Topics: Hough
Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They can be performed sequentially or simultaneou
 Model tting They can be performed sequentially or simultaneou") an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
an edge image, nd line or curve segments present Given the image. in Line and Curves Detection 1 Issues with Curve Detection Grouping (e.g., the Canny hysteresis thresholding procedure) Model tting They
Generalized Hough Transform, line fitting
 Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Generalized Hough Transform, line fitting Introduction to Computer Vision CSE 152 Lecture 11-a Announcements Assignment 2: Due today Midterm: Thursday, May 10 in class Non-maximum suppression For every
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection
 Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
Multimedia Computing: Algorithms, Systems, and Applications: Edge Detection By Dr. Yu Cao Department of Computer Science The University of Massachusetts Lowell Lowell, MA 01854, USA Part of the slides
INFO0948 Fitting and Shape Matching
 INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
INFO0948 Fitting and Shape Matching Renaud Detry University of Liège, Belgium Updated March 31, 2015 1 / 33 These slides are based on the following book: D. Forsyth and J. Ponce. Computer vision: a modern
Segmentation (Part 2)
") Segmentation (Part 2) Today s Readings Chapters 6., 6.2, 6.4, 7., 7.2 http://www.dai.ed.ac.uk/hipr2/morops.htm Dilation, erosion, opening, closing From images to objects What Defines an Object? Subjective
Segmentation (Part 2) Today s Readings Chapters 6., 6.2, 6.4, 7., 7.2 http://www.dai.ed.ac.uk/hipr2/morops.htm Dilation, erosion, opening, closing From images to objects What Defines an Object? Subjective
CS 664 Image Matching and Robust Fitting. Daniel Huttenlocher
 CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
CS 664 Image Matching and Robust Fitting Daniel Huttenlocher Matching and Fitting Recognition and matching are closely related to fitting problems Parametric fitting can serve as more restricted domain
Announcements. Segmentation (Part 2) Image Segmentation. From images to objects. Image histograms. What do histograms look like?
 Image Segmentation. From images to objects. Image histograms. What do histograms look like?") Announcements Segmentation (Part 2) Questions on the project? Updates to project page and lecture slides from /8 Midterm (take home) out next Friday covers material up through next Friday s lecture have
Announcements Segmentation (Part 2) Questions on the project? Updates to project page and lecture slides from /8 Midterm (take home) out next Friday covers material up through next Friday s lecture have
Template Matching Rigid Motion
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves
 CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
CS443: Digital Imaging and Multimedia Perceptual Grouping Detecting Lines and Simple Curves Spring 2008 Ahmed Elgammal Dept. of Computer Science Rutgers University Outlines Perceptual Grouping and Segmentation
Fitting. Fitting. Slides S. Lazebnik Harris Corners Pkwy, Charlotte, NC
 Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Fitting We ve learned how to detect edges, corners, blobs. Now what? We would like to form a higher-level, more compact representation of the features in the image by grouping multiple features according
Types of Edges. Why Edge Detection? Types of Edges. Edge Detection. Gradient. Edge Detection
 Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
Why Edge Detection? How can an algorithm extract relevant information from an image that is enables the algorithm to recognize objects? The most important information for the interpretation of an image
6.801/866. Segmentation and Line Fitting. T. Darrell
 6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
6.801/866 Segmentation and Line Fitting T. Darrell Segmentation and Line Fitting Gestalt grouping Background subtraction K-Means Graph cuts Hough transform Iterative fitting (Next time: Probabilistic segmentation)
RANSAC and some HOUGH transform
 RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
RANSAC and some HOUGH transform Thank you for the slides. They come mostly from the following source Dan Huttenlocher Cornell U Matching and Fitting Recognition and matching are closely related to fitting
Edge and corner detection
 Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge and corner detection Prof. Stricker Doz. G. Bleser Computer Vision: Object and People Tracking Goals Where is the information in an image? How is an object characterized? How can I find measurements
Edge detection. Goal: Identify sudden. an image. Ideal: artist s line drawing. object-level knowledge)
") Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge detection Goal: Identify sudden changes (discontinuities) in an image Intuitively, most semantic and shape information from the image can be encoded in the edges More compact than pixels Ideal: artist
Edge linking. Two types of approaches. This process needs to be able to bridge gaps in detected edges due to the reason mentioned above
 Edge linking Edge detection rarely finds the entire set of edges in an image. Normally there are breaks due to noise, non-uniform illumination, etc. If we want to obtain region boundaries (for segmentation)
Edge linking Edge detection rarely finds the entire set of edges in an image. Normally there are breaks due to noise, non-uniform illumination, etc. If we want to obtain region boundaries (for segmentation)
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Template Matching Rigid Motion. Find transformation to align two images. Focus on geometric features
 Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Template Matching Rigid Motion Find transformation to align two images. Focus on geometric features (not so much interesting with intensity images) Emphasis on tricks to make this efficient. Problem Definition
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Why is computer vision difficult?
 Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
Why is computer vision difficult? Viewpoint variation Illumination Scale Why is computer vision difficult? Intra-class variation Motion (Source: S. Lazebnik) Background clutter Occlusion Challenges: local
CS 558: Computer Vision 4 th Set of Notes
 1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
1 CS 558: Computer Vision 4 th Set of Notes Instructor: Philippos Mordohai Webpage: www.cs.stevens.edu/~mordohai E-mail: Philippos.Mordohai@stevens.edu Office: Lieb 215 Overview Keypoint matching Hessian
CAP 5415 Computer Vision Fall 2012
 CAP 5415 Computer Vision Fall 2012 Hough Transform Lecture-18 Sections 4.2, 4.3 Fundamentals of Computer Vision Image Feature Extraction Edges (edge pixels) Sobel, Roberts, Prewit Laplacian of Gaussian
CAP 5415 Computer Vision Fall 2012 Hough Transform Lecture-18 Sections 4.2, 4.3 Fundamentals of Computer Vision Image Feature Extraction Edges (edge pixels) Sobel, Roberts, Prewit Laplacian of Gaussian
Model Fitting. Introduction to Computer Vision CSE 152 Lecture 11
 Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
Model Fitting CSE 152 Lecture 11 Announcements Homework 3 is due May 9, 11:59 PM Reading: Chapter 10: Grouping and Model Fitting What to do with edges? Segment linked edge chains into curve features (e.g.,
OBJECT detection in general has many applications
 1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
1 Implementing Rectangle Detection using Windowed Hough Transform Akhil Singh, Music Engineering, University of Miami Abstract This paper implements Jung and Schramm s method to use Hough Transform for
Image warping and stitching
 Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Image warping and stitching Thurs Oct 15 Last time Feature-based alignment 2D transformations Affine fit RANSAC 1 Robust feature-based alignment Extract features Compute putative matches Loop: Hypothesize
Pattern recognition systems Lab 3 Hough Transform for line detection
 Pattern recognition systems Lab 3 Hough Transform for line detection 1. Objectives The main objective of this laboratory session is to implement the Hough Transform for line detection from edge images.
Pattern recognition systems Lab 3 Hough Transform for line detection 1. Objectives The main objective of this laboratory session is to implement the Hough Transform for line detection from edge images.
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
CS5670: Computer Vision Noah Snavely Lecture 2: Edge detection From Sandlot Science Announcements Project 1 (Hybrid Images) is now on the course webpage (see Projects link) Due Wednesday, Feb 15, by 11:59pm
Segmentation and Grouping April 19 th, 2018
 Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Segmentation and Grouping April 19 th, 2018 Yong Jae Lee UC Davis Features and filters Transforming and describing images; textures, edges 2 Grouping and fitting [fig from Shi et al] Clustering, segmentation,
Image warping and stitching
 Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Image warping and stitching May 4 th, 2017 Yong Jae Lee UC Davis Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 2 Alignment problem In alignment, we will
Object Detection. Sanja Fidler CSC420: Intro to Image Understanding 1/ 1
 Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
Object Detection Sanja Fidler CSC420: Intro to Image Understanding 1/ 1 Object Detection The goal of object detection is to localize objects in an image and tell their class Localization: place a tight
10/03/11. Model Fitting. Computer Vision CS 143, Brown. James Hays. Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem
 10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
10/03/11 Model Fitting Computer Vision CS 143, Brown James Hays Slides from Silvio Savarese, Svetlana Lazebnik, and Derek Hoiem Fitting: find the parameters of a model that best fit the data Alignment:
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 10 130221 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Canny Edge Detector Hough Transform Feature-Based
Image warping and stitching
 Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image warping and stitching May 5 th, 2015 Yong Jae Lee UC Davis PS2 due next Friday Announcements 2 Last time Interactive segmentation Feature-based alignment 2D transformations Affine fit RANSAC 3 Alignment
Image Features: Local Descriptors. Sanja Fidler CSC420: Intro to Image Understanding 1/ 58
 Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
Image Features: Local Descriptors Sanja Fidler CSC420: Intro to Image Understanding 1/ 58 [Source: K. Grauman] Sanja Fidler CSC420: Intro to Image Understanding 2/ 58 Local Features Detection: Identify
HOUGH TRANSFORM. Plan for today. Introduction to HT. An image with linear structures. INF 4300 Digital Image Analysis
 INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
INF 4300 Digital Image Analysis HOUGH TRANSFORM Fritz Albregtsen 14.09.2011 Plan for today This lecture goes more in detail than G&W 10.2! Introduction to Hough transform Using gradient information to
E0005E - Industrial Image Analysis
 E0005E - Industrial Image Analysis The Hough Transform Matthew Thurley slides by Johan Carlson 1 This Lecture The Hough transform Detection of lines Detection of other shapes (the generalized Hough transform)
E0005E - Industrial Image Analysis The Hough Transform Matthew Thurley slides by Johan Carlson 1 This Lecture The Hough transform Detection of lines Detection of other shapes (the generalized Hough transform)
From Szymon Rusinkiewicz, Princeton
 Hough Transform General idea: transform from image coordinates to parameter space of feature Need parameterized model of features For each piel, determine all parameter values that might have given rise
Hough Transform General idea: transform from image coordinates to parameter space of feature Need parameterized model of features For each piel, determine all parameter values that might have given rise
Outline. Segmentation & Grouping. Examples of grouping in vision. Grouping in vision. Grouping in vision 2/9/2011. CS 376 Lecture 7 Segmentation 1
 Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Outline What are grouping problems in vision? Segmentation & Grouping Wed, Feb 9 Prof. UT-Austin Inspiration from human perception Gestalt properties Bottom-up segmentation via clustering Algorithms: Mode
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Segmentation (continued)
") Segmentation (continued) Lecture 05 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr Mubarak Shah Professor, University of Central Florida The Robotics
Segmentation (continued) Lecture 05 Computer Vision Material Citations Dr George Stockman Professor Emeritus, Michigan State University Dr Mubarak Shah Professor, University of Central Florida The Robotics
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Edge detection. Gradient-based edge operators
 Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge detection Gradient-based edge operators Prewitt Sobel Roberts Laplacian zero-crossings Canny edge detector Hough transform for detection of straight lines Circle Hough Transform Digital Image Processing:
Edge Detection CSC 767
 Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Edge Detection CSC 767 Edge detection Goal: Identify sudden changes (discontinuities) in an image Most semantic and shape information from the image can be encoded in the edges More compact than pixels
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Segmentation I: Edges and Lines
 Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
Segmentation I: Edges and Lines Prof. Eric Miller elmiller@ece.tufts.edu Fall 2007 EN 74-ECE Image Processing Lecture 8-1 Segmentation Problem of breaking an image up into regions are are interesting as
The goals of segmentation
 Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
Image segmentation The goals of segmentation Group together similar-looking pixels for efficiency of further processing Bottom-up process Unsupervised superpixels X. Ren and J. Malik. Learning a classification
What is an edge? Paint. Depth discontinuity. Material change. Texture boundary
 EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
EDGES AND TEXTURES The slides are from several sources through James Hays (Brown); Srinivasa Narasimhan (CMU); Silvio Savarese (U. of Michigan); Bill Freeman and Antonio Torralba (MIT), including their
Segmentation and Grouping April 21 st, 2015
 Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Segmentation and Grouping April 21 st, 2015 Yong Jae Lee UC Davis Announcements PS0 grades are up on SmartSite Please put name on answer sheet 2 Features and filters Transforming and describing images;
Feature Matching + Indexing and Retrieval
 CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
CS 1699: Intro to Computer Vision Feature Matching + Indexing and Retrieval Prof. Adriana Kovashka University of Pittsburgh October 1, 2015 Today Review (fitting) Hough transform RANSAC Matching points
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Segmentation & Grouping Kristen Grauman UT Austin. Announcements
 Segmentation & Grouping Kristen Grauman UT Austin Tues Feb 7 A0 on Canvas Announcements No office hours today TA office hours this week as usual Guest lecture Thursday by Suyog Jain Interactive segmentation
Segmentation & Grouping Kristen Grauman UT Austin Tues Feb 7 A0 on Canvas Announcements No office hours today TA office hours this week as usual Guest lecture Thursday by Suyog Jain Interactive segmentation
Image Analysis. Edge Detection
 Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
Image Analysis Edge Detection Christophoros Nikou cnikou@cs.uoi.gr Images taken from: Computer Vision course by Kristen Grauman, University of Texas at Austin (http://www.cs.utexas.edu/~grauman/courses/spring2011/index.html).
CS 2770: Computer Vision. Edges and Segments. Prof. Adriana Kovashka University of Pittsburgh February 21, 2017
 CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
CS 2770: Computer Vision Edges and Segments Prof. Adriana Kovashka University of Pittsburgh February 21, 2017 Edges vs Segments Figure adapted from J. Hays Edges vs Segments Edges More low-level Don t
Feature Tracking and Optical Flow
 Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
Feature Tracking and Optical Flow Prof. D. Stricker Doz. G. Bleser Many slides adapted from James Hays, Derek Hoeim, Lana Lazebnik, Silvio Saverse, who 1 in turn adapted slides from Steve Seitz, Rick Szeliski,
CPSC 425: Computer Vision
 CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CPSC 425: Computer Vision Image Credit: https://docs.adaptive-vision.com/4.7/studio/machine_vision_guide/templatematching.html Lecture 9: Template Matching (cont.) and Scaled Representations ( unless otherwise
CS231A Midterm Review. Friday 5/6/2016
 CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
CS231A Midterm Review Friday 5/6/2016 Outline General Logistics Camera Models Non-perspective cameras Calibration Single View Metrology Epipolar Geometry Structure from Motion Active Stereo and Volumetric
Fi#ng & Matching Region Representa3on Image Alignment, Op3cal Flow
 Fi#ng & Matching Region Representa3on Image Alignment, Op3cal Flow Lectures 5 & 6 Prof. Fergus Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros. Facebook 360 photos Panoramas How do we build
Fi#ng & Matching Region Representa3on Image Alignment, Op3cal Flow Lectures 5 & 6 Prof. Fergus Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros. Facebook 360 photos Panoramas How do we build
Multi-stable Perception. Necker Cube
 Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
Multi-stable Perception Necker Cube Spinning dancer illusion, Nobuuki Kaahara Fitting and Alignment Computer Vision Szeliski 6.1 James Has Acknowledgment: Man slides from Derek Hoiem, Lana Lazebnik, and
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm
 EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
EE368 Project Report CD Cover Recognition Using Modified SIFT Algorithm Group 1: Mina A. Makar Stanford University mamakar@stanford.edu Abstract In this report, we investigate the application of the Scale-Invariant
Image Processing and Computer Vision
 1 / 1 Image Processing and Computer Vision Detecting primitives and rigid objects in Images Martin de La Gorce martin.de-la-gorce@enpc.fr February 2015 Detecting lines 2 / 1 How can we detect simple primitive
1 / 1 Image Processing and Computer Vision Detecting primitives and rigid objects in Images Martin de La Gorce martin.de-la-gorce@enpc.fr February 2015 Detecting lines 2 / 1 How can we detect simple primitive