Shape from Silhouettes
|
|
|
- Madeline Greer
- 6 years ago
- Views:
Transcription
1 Shape from Silhouettes
2 Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20 Model fitting (RANSAC, EM, ) 6 Oct.27 Stereo Matching 7 Nov.3 2D Shape Matching 8 Nov.10 Segmentation 9 Nov.17 Shape from Silhouettes 10 Nov.24 Structure from motion 11 Dec.1 Optical Flow 12 Dec.8 Tracking (Kalman, particle filter) 13 Dec.15 Object category recognition 14 Dec.22 Specific object recognition



3 Shape from silhouettes Slides from Lazebnik, Matusik Yerex and others Automatic 3D Model Construction for Turn-Table Sequences, A.W. Fitzgibbon, G. Cross, and A. Zisserman, SMILE 1998

4 What is shape from silhouette? The silhouette, or occluding contour of an object in an image contains some information about the 3D shape of the object. Given a single silhouette image of an object, we know that the 3D object lies inside the volume generated by backprojecting the silhouette area using the camera parameters.
5 What is shape from silhouette? With multiple views of the same object, we can intersect the generalized cones generated by each image, to build a volume which is guaranteed to contain the object. The limiting smallest volume obtainable in this way is known as the visual hull of the object.
6 Literature Theory Laurentini 94, Petitjean 98, Laurentini 99 Solid cone intersection: Baumgart 74 (polyhedra), Szeliski 93 (octrees) Image-based visual hulls Matusik et al. 00, Matusik et al. 01 Advanced modeling Sullivan & Ponce 98, Cross & Zisserman 00, Matusik et al. 02 Applications Leibe et al. 00, Lok 01, Shlyakhter et al. 01

7 Visual Hull: A 3D Example





8 Why use a Visual Hull? Can be computed robustly Can be computed efficiently background + foreground background - = foreground
9 Computational complexity Intersection of many volumes can be slow Simple polyhedron-polyhedron intersection algorithms are inefficient To improve performance, most methods: Quantize volumes and/or Perform Intersection computations in 2D not 3D
10 Algorithms Standard voxel based method Marching intersections Image-based visual hulls Exact polyhedral methods
11 Voxel based First the object space is split up into a 3D grid of voxels. Each voxel is intersected with each silhouette volume. Only voxels that lie inside all silhouette volumes remain part of the final shape.

12 Voxel based - example
13 Marching intersections The object space is again split up into a 3D grid. The grid that is used is made of 3 sets of rays, rather than voxels. Rays are aligned with the 3 axes, and store points of entry/exit into the volume Each silhouette cone can be converted to the marching intersections data structure. Then merging them is reduced to 1D intersections along each ray. M. Tarini et al, Marching intersections, An efficient Approach to Shape from Silhouette
14 Marching intersections - example
15 Image based visual hulls This algorithm will only produce renderings of a visual hull from any view. Every pixel in the desired output image is backprojected to form a 3D ray. Each of those rays is intersected with each of the input silhouettes in the same way as the rays in the marching intersections method. Then a pixel in the output image is inside the new rendering of the visual hull if its ray has any segments left in it that are intersecting the visual hull. The depth of these pixels is known from the depth of the nearest entry point on the ray Wojciech Matusik, Image Based Visual Hulls

16 Image based - example

17 Image-Based Computation Reference 1 Desired Reference 2

18 Observation Incremental computation along scanlines

19 IBVH Results Approximately constant computation per pixel per camera Parallelizes Consistent with input silhouettes

20 Video - Depth
21 Shading Algorithm A view-dependent strategy

22 Visibility Algorithm
23 Visibility in 2D Reference view Desired view
24 Visibility in 2D Front-most Points Reference view Desired view
25 Visibility in 2D Visible Reference view Desired view
26 Visibility in 2D Coverage Mask Reference view Desired view
27 Visibility in 2D Visible Coverage Mask Reference view Desired view
28 Visibility in 2D Visible Coverage Mask Reference view Desired view
29 Visibility in 2D Not Visible Coverage Mask Reference view Desired view
30 Visibility in 2D Coverage Mask Reference view Desired view
31 Visibility in 2D Visible Coverage Mask Reference view Desired view
32 Visibility in 2D Coverage Mask Reference view Desired view
33 Visibility in 2D Not Visible Coverage Mask Reference view Desired view

34 Video Shading
35 System Camera Client Camera Client Camera Client Camera Client Server (4x 500 Mhz)
36 System Trigger Signal Camera Client Camera Client Camera Client Camera Client Server (4x 500 Mhz)
37 System Camera Client Camera Client Camera Client Camera Client Server (4x 500 Mhz)
38 System Camera Client Camera Client Camera Client Camera Client Compressed video Server (4x 500 Mhz)
39 System Camera Client Camera Client Camera Client Camera Client Server (4x 500 Mhz) Intersection
40 System Camera Client Camera Client Camera Client Camera Client Server (4x 500 Mhz) Visibility
41 System Camera Client Camera Client Camera Client Camera Client Server (4x 500 Mhz) Shading

42 More IBVH Results
43 Exact Polyhedral Methods First, silhouette images are converted to polygons. (convex or non-convex, with holes allowed) Each edge is back projected to form a 3d polygon. Then each polygon is projected onto each image, and intersected with each silhouette in 2D. The resulting polygons are assembled to form the polyhedral visual hull Wojciech Matusik, An Efficient Visual Hull Computation Algorithm
44 Exact Polyhedral - example
45 The Setup
46 How Do Visual Cones Intersect?
47 How Do Visual Cones Intersect?
48 How Do Visual Cones Intersect?
49 How Do Visual Cones Intersect? Frontier Point
50 How Do Visual Cones Intersect?
51 How Do Visual Cones Intersect? Intersection Points Frontier Points
52 How Do Visual Cones Intersect? Cone Strips
53 Motion from silhouettes? Circular motion Camera networks

54 Circular motion Mendonca et al.99


55 Circular motion Mendonca et al.99
56 Circular motion Mendonca et al.99



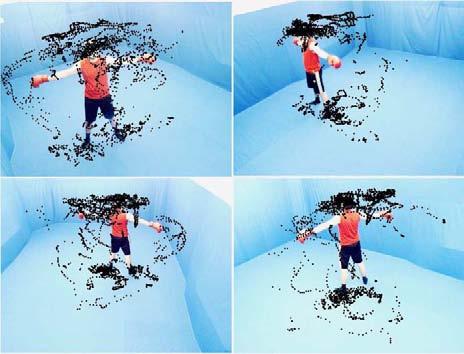
57 Camera networks 4 NTSC videos recorded by 4 computers for 4 minutes Manually synchronized and calibrated using MoCap system
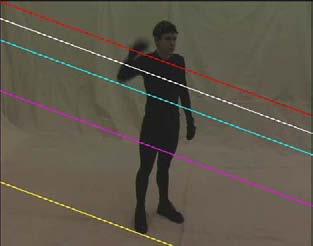
58 Multiple View Geometry of Silhouettes Frontier Points Epipolar Tangents T x Fx1 2 = T x Fx 1 2 = 0 0 x 1 x 2 x 1 x 2 Points on Silhouettes in 2 views do not correspond in general except for projected Frontier Points Always at least 2 extremal frontier points per silhouette In general, correspondence only over two views
59 Camera Network Calibration from Silhouettes (Sinha et al, CVPR 04) 7 or more corresponding frontier points needed to compute epipolar geometry for general motion Hard to find on single silhouette and possibly occluded However, Visual Hull systems record many silhouettes!

")
")
60 Camera Network Calibration from Silhouettes If we know the epipoles, it is simple Draw 3 outer epipolar tangents (from two silhouettes) Compute corresponding line homography H -T (not unique) Epipolar Geometry F=[e] x H
61 Let s just sample: RANSAC Repeat Generate random hypothesis for epipoles Compute epipolar geometry Verify hypothesis and count inliers until satisfying hypothesis Refine hypothesis minimize symmetric transfer error of frontier points include more inliers (use strict threshold, e.g. 1 pixels) Until error and inliers stable (use conservative threshold, e.g. 5 pixels, but abort early if not promising) We ll need an efficient representation as we are likely to have to do many trials!

62 A Compact Representation for Silhouettes Tangent Envelopes Convex Hull of Silhouette. Tangency Points for a discrete set of angles. Approx. 500 bytes/frame. Hence a whole video sequences easily fits in memory. Tangency Computations are efficient.

63 Epipole Hypothesis and Computing H
64 Model Verification
65 Remarks RANSAC allows efficient exploration of 4D parameter space (i.e. epipole pair) while being robust to imperfect silhouettes Select key-frames to avoid having too many identical constraints (when silhouette is static)

66 Computed Fundamental Matrices


67 Computed Fundamental Matrices F computed directly (black epipolar lines) F after consistent 3D reconstruction (color)


68 Computed Fundamental Matrices F computed directly (black epipolar lines) F after consistent 3D reconstruction (color)
69 From epipolar geometry to full calibration Not trivial because only matches between two views Approach similar to Levi et al. CVPR 03, but practical Key step is to solve for camera triplet (v is 4-vector ) (also linear in v) Assemble Choose P complete camera a network 3 corresponding to closest projective bundle, self-calibration, metric bundle

70 Metric Cameras and Visual-Hull Reconstruction from 4 views Final calibration quality comparable to explicit calibration procedure

71 Validation experiment: Reprojection of silhouettes

72 More experiments



")
73 More experiments MPI e cal =0.11 pixels Luca Ballan e cal =0.22 pixels Starck&Hilton e cal =0.23 pixels INRIA e cal =0.25 pixels INRIA e cal =0.22 pixels MPI e cal =0.19 pixels More details: (Sinha and Pollefeys, IJCV2010)

74 Shape from silhouettes Unreliable silhouettes: do not make decision about their location Do sensor fusion: use all image information simultaneously (Franco and Boyer, ICCV05)




75 Bayesian formulation Idea: we wish to find the content of the scene from images, as a probability grid Modeling the forward problem - explaining image observations given the grid state - is easy. It can be accounted for in a sensor model. Bayesian inference enables the formulation of our initial inverse problem from the sensor model Simplification for tractability: independent analysis and processing of voxels



76 Visualization (Franco and Boyer, ICCV05)


77 Shape from silhouettes with occlusions? Problem:

78 Occluder shape from incomplete silhouettes A simple deterministic scheme

79 To estimate occluder grid O Treat voxels O x independently Only consider voxels G i X on line of sight
 Enable capture in real environment")


80 Dynamic 3D capture in the real world (Guan et al., CVPR07) Enable capture in real environment with occlusions Robust inference of shape from partially occluded silhouettes Inference of background shape from free-space & discrepancies 9 views, 30fps, 720by480, calibrated, about 1.2min.
81 Dynamic 3D capture in the real world (Guan et al., CVPR07) acquisition setup: 9 camcorders indirectly inferred background example video frames
 acquisition setup: 9 camcorders indirectly inferred")
82 Dynamic 3D capture in the real world (Guan et al., CVPR07) acquisition setup: 9 camcorders indirectly inferred background example video frames

83 Dynamic 3D capture in the real world (Guan et al., CVPR07)
 Separate foreground model")



84 3D tracking of multiple persons (Guan et al., CVPR08) Separate foreground model for each person (GMM trained using EM) Random variable: (person 1,, person n, unmodeled, background) Perform 3D analysis using all views, assume people consist of single connected component Unmodeled foreground class catches shadows, new persons,...


85 3D tracking of multiple persons (Guan et al., CVPR08) two-label multi-label multi-label + localization multi-label + localization + mutual occlusions

86 Space Carving
87 3D Reconstruction from Calibrated Images Scene Volume V Input Images (Calibrated) Goal: Determine transparency, radiance of points in V
88 Discrete Formulation: Voxel Coloring Discretized Scene Volume Input Images (Calibrated) Goal: Assign RGBA values to voxels in V photo-consistent with images
89 Complexity and Computability Discretized Scene Volume 3 N voxels C colors True Scene Photo-Consistent Scenes All Scenes (C N3 )
90 Issues Theoretical Questions Identify class of all photo-consistent scenes Practical Questions How do we compute photo-consistent models?
91 Voxel Coloring Solutions 1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98]
92 Reconstruction from Silhouettes (C = 2) Binary Images Approach: Backproject each silhouette Intersect backprojected volumes
93 Volume Intersection Reconstruction Contains the True Scene But is generally not the same In the limit get visual hull Complement of all lines that don t intersect S
94 Voxel Algorithm for Volume Intersection Color voxel black if on silhouette in every image O(MN 3 ), for M images, N 3 voxels Don t have to search 2 N3 possible scenes!
95 Properties of Volume Intersection Pros Easy to implement, fast Accelerated via octrees [Szeliski 1993] Cons No concavities Reconstruction is not photo-consistent Requires identification of silhouettes
96 Voxel Coloring Solutions 1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98]

97 Voxel Coloring Approach 1. Choose voxel 2. Project and correlate 3. Color if consistent Visibility Problem: in which images is each voxel visible?

98 The Global Visibility Problem Which points are visible in which images? Known Scene Unknown Scene Forward Visibility known scene Inverse Visibility known images





99 Depth Ordering: visit occluders first! Layers Scene Traversal Condition: depth order is view-independent
100 Panoramic Depth Ordering Cameras oriented in many different directions Planar depth ordering does not apply

101 Panoramic Depth Ordering Layers radiate outwards from cameras
102 Panoramic Layering Layers radiate outwards from cameras


103 Panoramic Layering Layers radiate outwards from cameras


104 Compatible Camera Configurations Depth-Order Constraint Scene outside convex hull of camera centers Inward-Looking cameras above scene Outward-Looking cameras inside scene




105 Calibrated Image Acquisition Selected Dinosaur Images Calibrated Turntable 360 rotation (21 Selected Flower Images


106 Voxel Coloring Results (Video) Dinosaur Reconstruction 72 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI Flower Reconstruction 70 K voxels colored 7.6 M voxels tested 7 min. to compute on a 250MHz SGI
107 Limitations of Depth Ordering A view-independent depth order may not exist p Need more powerful general-case algorithms q Unconstrained camera positions Unconstrained scene geometry/topology
108 Voxel Coloring Solutions 1. C=2 (silhouettes) Volume intersection [Martin 81, Szeliski 93] 2. C unconstrained, viewpoint constraints Voxel coloring algorithm [Seitz & Dyer 97] 3. General Case Space carving [Kutulakos & Seitz 98]
109 Space Carving Algorithm Image 1... Space Carving Algorithm Image N Initialize to a volume V containing the true scene Choose a voxel on the current surface Project to visible input images Carve if not photo-consistent Repeat until convergence
110 Convergence Consistency Property The resulting shape is photo-consistent all inconsistent points are removed Convergence Property Carving converges to a non-empty shape a point on the true scene is never removed V p V

111 What is Computable? V V True Scene Photo Hull The Photo Hull is the UNION of all photo-consistent scenes in V It is a photo-consistent scene reconstruction Tightest possible bound on the true scene Computable via provable Space Carving Algorithm
112 Space Carving Algorithm The Basic Algorithm is Unwieldy Complex update procedure Alternative: Multi-Pass Plane Sweep Efficient, can use texture-mapping hardware Converges quickly in practice Easy to implement
113 Space Carving Algorithm Step 1: Initialize V to volume containing true scene Step 2: For every voxel on surface of V test photo-consistency of voxel if voxel is inconsistent, carve it Step 3: Repeat Step 2 until all voxels consistent Convergence: Always converges to a photo-consistent model (when all assumptions are met) Good results on difficult real-world scenes
114 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence True Scene Reconstruction
115 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
116 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
117 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
118 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
119 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
120 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
121 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
122 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
123 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
124 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
125 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
126 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
127 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
128 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
129 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
130 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
131 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
132 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
133 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
134 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence
135 Multi-Pass Plane Sweep Sweep plane in each of 6 principle directions Consider cameras on only one side of plane Repeat until convergence



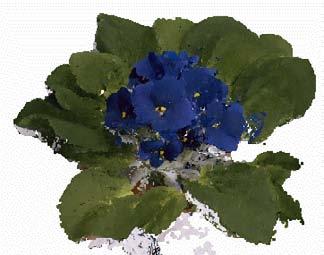
136 Space Carving Results: African Violet Input Image (1 of 45) Reconstruction Reconstruction Reconstruction


 Views")
137 Space Carving Results: Hand Input Image (1 of 100) Views of Reconstruction
138 Other Features Coarse-to-fine Reconstruction Represent scene as octree Reconstruct low-res model first, then refine Hardware-Acceleration Use texture-mapping to compute voxel projections Process voxels an entire plane at a time Limitations Need to acquire calibrated images Restriction to simple radiance models Bias toward maximal (fat) reconstructions Transparency not supported

139

140 Probalistic Space Carving voxel occluded


141 The Master's Lodge Image Sequence Bayesian
142 Space-carving for specular surfaces Extended photoconsistency: (Yang, Pollefeys & Welch 2003) 1 1 Diffuse color color of the light Saturation point 0 1 Reflected Light in RGB color space I N V Dielectric Materials (such as plastic and glass) Light Intensity Normal vector View Vector L R C Object Color Lighting vector Reflection vector




143 Experiment

144 Animated Views Our result
145 Other Approaches Level-Set Methods [Faugeras & Keriven 1998] Evolve implicit function by solving PDE s More recent level-set/pde approaches by Pons et al., CVPR05, Gargallo et al. ICCV07, Kalin and Kremers ECCV08,
146 ρ(x) Volumetric Graph cuts 1. Outer surface 2. Inner surface (at constant offset) 3. Discretize middle volume 4. Assign photoconsistency cost to voxels Slides from [Vogiatzis et al. CVPR2005]
147 Volumetric Graph cuts Source Sink Slides from [Vogiatzis et al. CVPR2005]
148 Volumetric Graph cuts cut 3D Surface S Cost of a cut S [Boykov and Kolmogorov ICCV 2001] ρ(x) ds S Source Sink Slides from [Vogiatzis et al. CVPR2005]
149 Volumetric Graph cuts Minimum cut Minimal 3D Surface under photo-consistency metric Source [Boykov and Kolmogorov ICCV 2001] Sink Slides from [Vogiatzis et al. CVPR2005]
150 Occlusion Photo-consistency 1. Get nearest point on outer surface 2. Use outer surface for 2. Discard occlusions occluded views Slides from [Vogiatzis et al. CVPR2005]
151 Occlusion Photo-consistency Self occlusion Slides from [Vogiatzis et al. CVPR2005]
152 Occlusion Photo-consistency Self occlusion Slides from [Vogiatzis et al. CVPR2005]
153 Photo-consistency Occlusion N threshold on angle between normal and viewing direction threshold= ~60 Slides from [Vogiatzis et al. CVPR2005]
154 Score Photo-consistency Normalised cross correlation Use all remaining cameras pair wise Average all NCC scores Slides from [Vogiatzis et al. CVPR2005]
155 Score Photo-consistency Average NCC = C Voxel score ρ = 1 - exp( -tan 2 [π(c-1)/4] / σ 2 ) 0 ρ 1 σ = 0.05 in all experiments Slides from [Vogiatzis et al. CVPR2005]

156 Example Slides from [Vogiatzis et al. CVPR2005]

157 Example - Visual Hull Slides from [Vogiatzis et al. CVPR2005]
158 Example - Slice Slides from [Vogiatzis et al. CVPR2005]

159 Example - Slice with graphcut Slides from [Vogiatzis et al. CVPR2005]


160 Example 3D Slides from [Vogiatzis et al. CVPR2005]

161 [Vogiatzis et al. PAMI2007]
162 Protrusion problem Balooning force favouring bigger volumes that fill the visual hull L.D. Cohen and I. Cohen. Finite-element methods for active contour models and balloons for 2-d and 3-d images. PAMI, 15(11): , November Slides from [Vogiatzis et al. CVPR2005]
:1131 1147, November 1993.")
163 Protrusion problem ρ(x) ds - λ dv S V Balooning force favouring bigger volumes that fill the visual hull L.D. Cohen and I. Cohen. Finite-element methods for active contour models and balloons for 2-d and 3-d images. PAMI, 15(11): , November Slides from [Vogiatzis et al. CVPR2005]

164 Protrusion problem Slides from [Vogiatzis et al. CVPR2005]

165 Protrusion problem Slides from [Vogiatzis et al. CVPR2005]
166 SOURCE w b Graph w ij = 4/3πh 2 * (ρ i +ρ j )/2 [Boykov and Kolmogorov ICCV 2001] w b = λh 3 w b i w ij j h Slides from [Vogiatzis et al. CVPR2005]


167 Graph-cut on Dual of Adaptive Tetrahedral Mesh (Sinha et. al. 2007) Address Memory and Computational Overhead Compute Photo-consistency only where it is needed Detect Interior Pockets using Visibility 168
168 Adaptive Mesh Refinement Cell (Tetrahedron) Unknown surface Face (triangle) 169
169 Adaptive Mesh Refinement Detect crossing faces by testing photo-consistency of points sampled on the faces 170
170 Adaptive Mesh Refinement If none of the faces of a cell are crossing faces, that cell cannot any surface element. 171
171 Adaptive Mesh Refinement Prune the Inactive cells Refine the Active cells 172

172 Mesh with Photo-consistency Final Mesh shown with Photo-consistency 173

173 Detect Interior Use Visibility of the Photo-consistent Patches Also proposed by Hernandez et. al. 2007, Labatut et. 174
174 First Graph-Cut Compute the Min-cut Source Sink Solution re-projected into the original silhouette 175
175 Silhouette Constraints Every such ray must meet the real surface at least once 176
176 Silhouette Constraints Photo-consistency Surface Test photo-consistency along the ray Robustly find an interior cell 177
177 Final Graph-Cut Source Sink 178

178 Final Graph-Cut Before After 179
179 Results After graph-cut optimization After local refinement 36 images 2000 x 3000 pixels 180

180 20 images 640 x 480 pixels 20 images Running Time: Graph Construction : 25 mins Graph-cut : 5 mins Local Refinement : 20 mins



181 36 images 36 images 182


182 24 images 48 images 47 images 183


183 Photo-consistency + silhouettes [Sinha and Pollefeys ICCV05] Optimize photo-consistency while exactly enforcing silhouette constraint




184 Interesting comparison of multi-view stereo approaches
185 Next week: Structure from Motion 18
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Shape from Silhouettes II
 Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Shape from Silhouettes II Guido Gerig CS 6320, S2013 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S. Franco, J. Matusik s presentations,
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization
 Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Visual Shapes of Silhouette Sets
 Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency
 1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
1 Multi-view Stereo via Volumetric Graph-cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Carlos Hernández Esteban, Philip H. S. Torr, Roberto Cipolla 2 Abstract This paper presents a volumetric
Polyhedral Visual Hulls for Real-Time Rendering
 Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Polyhedral Visual Hulls for Real-Time Rendering Wojciech Matusik Chris Buehler Leonard McMillan MIT Laboratory for Computer Science Abstract. We present new algorithms for creating and rendering visual
Efficient View-Dependent Sampling of Visual Hulls
 Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Lecture 8 Active stereo & Volumetric stereo In this lecture, we ll first discuss another framework for describing stereo systems called active stereo, and then introduce the problem of volumetric stereo,
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Stereo. 11/02/2012 CS129, Brown James Hays. Slides by Kristen Grauman
 Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Stereo 11/02/2012 CS129, Brown James Hays Slides by Kristen Grauman Multiple views Multi-view geometry, matching, invariant features, stereo vision Lowe Hartley and Zisserman Why multiple views? Structure
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Computer Vision Lecture 17
 Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics 13.01.2015 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar in the summer semester
Computer Vision Lecture 17
 Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Announcements Computer Vision Lecture 17 Epipolar Geometry & Stereo Basics Seminar in the summer semester Current Topics in Computer Vision and Machine Learning Block seminar, presentations in 1 st week
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
An Efficient Visual Hull Computation Algorithm
 An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
An Efficient Visual Hull Computation Algorithm Wojciech Matusik Chris Buehler Leonard McMillan Laboratory for Computer Science Massachusetts institute of Technology (wojciech, cbuehler, mcmillan)@graphics.lcs.mit.edu
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Camera Geometry II. COS 429 Princeton University
 Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
Camera Geometry II COS 429 Princeton University Outline Projective geometry Vanishing points Application: camera calibration Application: single-view metrology Epipolar geometry Application: stereo correspondence
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
3D Dynamic Scene Reconstruction from Multi-View Image Sequences
 3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
3D Dynamic Scene Reconstruction from Multi-View Image Sequences PhD Confirmation Report Carlos Leung Supervisor : A/Prof Brian Lovell (University Of Queensland) Dr. Changming Sun (CSIRO Mathematical and
Stereo and Epipolar geometry
 Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Previously Image Primitives (feature points, lines, contours) Today: Stereo and Epipolar geometry How to match primitives between two (multiple) views) Goals: 3D reconstruction, recognition Jana Kosecka
Camera Calibration from Dynamic Silhouettes Using Motion Barcodes
 Camera Calibration from Dynamic Silhouettes Using Motion Barcodes Gil Ben-Artzi Yoni Kasten Shmuel Peleg Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem, Israel
Camera Calibration from Dynamic Silhouettes Using Motion Barcodes Gil Ben-Artzi Yoni Kasten Shmuel Peleg Michael Werman School of Computer Science and Engineering The Hebrew University of Jerusalem, Israel
Multi-View Stereo via Graph Cuts on the Dual of an Adaptive Tetrahedral Mesh
 Multi-View Stereo via Graph Cuts on the Dual of an Adaptive Tetrahedral Mesh Sudipta N. Sinha Philippos Mordohai Marc Pollefeys Department of Computer Science, UNC Chapel Hill, USA Abstract We formulate
Multi-View Stereo via Graph Cuts on the Dual of an Adaptive Tetrahedral Mesh Sudipta N. Sinha Philippos Mordohai Marc Pollefeys Department of Computer Science, UNC Chapel Hill, USA Abstract We formulate
What have we leaned so far?
 What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
What have we leaned so far? Camera structure Eye structure Project 1: High Dynamic Range Imaging What have we learned so far? Image Filtering Image Warping Camera Projection Model Project 2: Panoramic
Lecture 10: Multi-view geometry
 Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi-view geometry Professor Stanford Vision Lab 1 What we will learn today? Review for stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Silhouette Coherence for Camera Calibration under Circular Motion
 1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
1 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Abstract We present a new approach to camera calibration as a part of a complete
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING
 VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
VOLUMETRIC MODEL REFINEMENT BY SHELL CARVING Y. Kuzu a, O. Sinram b a Yıldız Technical University, Department of Geodesy and Photogrammetry Engineering 34349 Beşiktaş Istanbul, Turkey - kuzu@yildiz.edu.tr
From Photohulls to Photoflux Optimization
 1 From Photohulls to Photoflux Optimization Yuri Boykov Computer Science Department University of Western Ontario London, ON, Canada Victor Lempitsky Department of Mathematics Moscow State University Moscow,
1 From Photohulls to Photoflux Optimization Yuri Boykov Computer Science Department University of Western Ontario London, ON, Canada Victor Lempitsky Department of Mathematics Moscow State University Moscow,
Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors
 Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors Keith Forbes 1 Anthon Voigt 2 Ndimi Bodika 2 1 Digital Image Processing Group 2 Automation and Informatics Group Department of Electrical
Visual Hulls from Single Uncalibrated Snapshots Using Two Planar Mirrors Keith Forbes 1 Anthon Voigt 2 Ndimi Bodika 2 1 Digital Image Processing Group 2 Automation and Informatics Group Department of Electrical
View Synthesis using Convex and Visual Hulls. Abstract
 View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
View Synthesis using Convex and Visual Hulls Y. Wexler R. Chellappa Center for Automation Research University of Maryland College Park Abstract This paper discusses two efficient methods for image based
Shape from the Light Field Boundary
 Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Appears in: Proc. CVPR'97, pp.53-59, 997. Shape from the Light Field Boundary Kiriakos N. Kutulakos kyros@cs.rochester.edu Department of Computer Sciences University of Rochester Rochester, NY 4627-226
Graph Cuts vs. Level Sets. part I Basics of Graph Cuts
 ECCV 2006 tutorial on Graph Cuts vs. Level Sets part I Basics of Graph Cuts Yuri Boykov University of Western Ontario Daniel Cremers University of Bonn Vladimir Kolmogorov University College London Graph
ECCV 2006 tutorial on Graph Cuts vs. Level Sets part I Basics of Graph Cuts Yuri Boykov University of Western Ontario Daniel Cremers University of Bonn Vladimir Kolmogorov University College London Graph
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Probabilistic visibility for multi-view stereo
 Probabilistic visibility for multi-view stereo Carlos Hernández 1 Computer Vision Group Toshiba Research Europe George Vogiatzis 2 Computer Vision Group Toshiba Research Europe Roberto Cipolla 3 Dept.
Probabilistic visibility for multi-view stereo Carlos Hernández 1 Computer Vision Group Toshiba Research Europe George Vogiatzis 2 Computer Vision Group Toshiba Research Europe Roberto Cipolla 3 Dept.
EECS 442 Computer vision. Stereo systems. Stereo vision Rectification Correspondence problem Active stereo vision systems
 EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
EECS 442 Computer vision Stereo systems Stereo vision Rectification Correspondence problem Active stereo vision systems Reading: [HZ] Chapter: 11 [FP] Chapter: 11 Stereo vision P p p O 1 O 2 Goal: estimate
Multi-View Reconstruction Preserving Weakly-Supported Surfaces
 Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection
 3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
3-D Shape Reconstruction from Light Fields Using Voxel Back-Projection Peter Eisert, Eckehard Steinbach, and Bernd Girod Telecommunications Laboratory, University of Erlangen-Nuremberg Cauerstrasse 7,
3D Reconstruction of Dynamic Textures with Crowd Sourced Data. Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm
 3D Reconstruction of Dynamic Textures with Crowd Sourced Data Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm 1 Background Large scale scene reconstruction Internet imagery 3D point cloud Dense geometry
3D Reconstruction of Dynamic Textures with Crowd Sourced Data Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm 1 Background Large scale scene reconstruction Internet imagery 3D point cloud Dense geometry
Visual-Hull Reconstruction from Uncalibrated and Unsynchronized Video Streams
 Visual-Hull Reconstruction from Uncalibrated and Unsynchronized Video Streams Sudipta N. Sinha and Marc Pollefeys {ssinha,marc}@cs.unc.edu Department of Computer Science University of North Carolina at
Visual-Hull Reconstruction from Uncalibrated and Unsynchronized Video Streams Sudipta N. Sinha and Marc Pollefeys {ssinha,marc}@cs.unc.edu Department of Computer Science University of North Carolina at
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
A virtual tour of free viewpoint rendering
 A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
A virtual tour of free viewpoint rendering Cédric Verleysen ICTEAM institute, Université catholique de Louvain, Belgium cedric.verleysen@uclouvain.be Organization of the presentation Context Acquisition
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t R 2 3,t 3 Camera 1 Camera
Shape-from-Silhouette with Two Mirrors and an Uncalibrated Camera
 Shape-from-Silhouette with Two Mirrors and an Uncalibrated Camera Keith Forbes 1, Fred Nicolls 1, Gerhard de Jager 1, and Anthon Voigt 2 1 Department of Electrical Engineering, University of Cape Town,
Shape-from-Silhouette with Two Mirrors and an Uncalibrated Camera Keith Forbes 1, Fred Nicolls 1, Gerhard de Jager 1, and Anthon Voigt 2 1 Department of Electrical Engineering, University of Cape Town,
Recap: Features and filters. Recap: Grouping & fitting. Now: Multiple views 10/29/2008. Epipolar geometry & stereo vision. Why multiple views?
 Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Recap: Features and filters Epipolar geometry & stereo vision Tuesday, Oct 21 Kristen Grauman UT-Austin Transforming and describing images; textures, colors, edges Recap: Grouping & fitting Now: Multiple
Lecture 10: Multi view geometry
 Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Lecture 10: Multi view geometry Professor Fei Fei Li Stanford Vision Lab 1 What we will learn today? Stereo vision Correspondence problem (Problem Set 2 (Q3)) Active stereo vision systems Structure from
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS INTRODUCTION
 PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
PHOTOREALISTIC OBJECT RECONSTRUCTION USING VOXEL COLORING AND ADJUSTED IMAGE ORIENTATIONS Yasemin Kuzu, Olaf Sinram Photogrammetry and Cartography Technical University of Berlin Str. des 17 Juni 135, EB
3D Modeling using multiple images Exam January 2008
 3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
3D Modeling using multiple images Exam January 2008 All documents are allowed. Answers should be justified. The different sections below are independant. 1 3D Reconstruction A Robust Approche Consider
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Epipolar Geometry and Stereo Vision Computer Vision Shiv Ram Dubey, IIIT Sri City Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X
Structure from motion
 Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Structure from motion Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R 1,t 1 R 2,t 2 R 3,t 3 Camera 1 Camera
Epipolar Geometry Prof. D. Stricker. With slides from A. Zisserman, S. Lazebnik, Seitz
 Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
Epipolar Geometry Prof. D. Stricker With slides from A. Zisserman, S. Lazebnik, Seitz 1 Outline 1. Short introduction: points and lines 2. Two views geometry: Epipolar geometry Relation point/line in two
CALIBRATING A NETWORK OF CAMERAS FROM LIVE OR ARCHIVED VIDEO. Sudipta N. Sinha, Marc Pollefeys
 CALIBRATING A NETWORK OF CAMERAS FROM LIVE OR ARCHIVED VIDEO Sudipta N. Sinha, Marc Pollefeys {ssinha,marc}@cs.unc.edu Department of Computer Science, University of North Carolina at Chapel Hill, USA.
CALIBRATING A NETWORK OF CAMERAS FROM LIVE OR ARCHIVED VIDEO Sudipta N. Sinha, Marc Pollefeys {ssinha,marc}@cs.unc.edu Department of Computer Science, University of North Carolina at Chapel Hill, USA.
Epipolar Geometry and Stereo Vision
 Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Epipolar Geometry and Stereo Vision Computer Vision Jia-Bin Huang, Virginia Tech Many slides from S. Seitz and D. Hoiem Last class: Image Stitching Two images with rotation/zoom but no translation. X x
Camera Network Calibration from Dynamic Silhouettes
 Camera Network Calibration from Dynamic Silhouettes Sudipta N. Sinha Marc Pollefeys Leonard McMillan. Dept. of Computer Science, University of North Carolina at Chapel Hill. {ssinha, marc, mcmillan}@cs.unc.edu
Camera Network Calibration from Dynamic Silhouettes Sudipta N. Sinha Marc Pollefeys Leonard McMillan. Dept. of Computer Science, University of North Carolina at Chapel Hill. {ssinha, marc, mcmillan}@cs.unc.edu
Epipolar Geometry Based On Line Similarity
 2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Epipolar Geometry Based On Line Similarity Gil Ben-Artzi Tavi Halperin Michael Werman
2016 23rd International Conference on Pattern Recognition (ICPR) Cancún Center, Cancún, México, December 4-8, 2016 Epipolar Geometry Based On Line Similarity Gil Ben-Artzi Tavi Halperin Michael Werman
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video
 Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Stereo. Outline. Multiple views 3/29/2017. Thurs Mar 30 Kristen Grauman UT Austin. Multi-view geometry, matching, invariant features, stereo vision
 Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Stereo Thurs Mar 30 Kristen Grauman UT Austin Outline Last time: Human stereopsis Epipolar geometry and the epipolar constraint Case example with parallel optical axes General case with calibrated cameras
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Occluder Simplification using Planar Sections
 Occluder Simplification using Planar Sections Ari Silvennoinen Hannu Saransaari Samuli Laine Jaakko Lehtinen Remedy Entertainment Aalto University Umbra Software NVIDIA NVIDIA Aalto University Coping with
Occluder Simplification using Planar Sections Ari Silvennoinen Hannu Saransaari Samuli Laine Jaakko Lehtinen Remedy Entertainment Aalto University Umbra Software NVIDIA NVIDIA Aalto University Coping with
Homographies and RANSAC
 Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Homographies and RANSAC Computer vision 6.869 Bill Freeman and Antonio Torralba March 30, 2011 Homographies and RANSAC Homographies RANSAC Building panoramas Phototourism 2 Depth-based ambiguity of position
Stereo: Disparity and Matching
 CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
CS 4495 Computer Vision Aaron Bobick School of Interactive Computing Administrivia PS2 is out. But I was late. So we pushed the due date to Wed Sept 24 th, 11:55pm. There is still *no* grace period. To
Multiview Stereo via Volumetric Graph-Cuts and Occlusion Robust Photo-Consistency
 IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 12, DECEMBER 2007 2241 Multiview Stereo via Volumetric Graph-Cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Member,
IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, VOL. 29, NO. 12, DECEMBER 2007 2241 Multiview Stereo via Volumetric Graph-Cuts and Occlusion Robust Photo-Consistency George Vogiatzis, Member,
Visual Hull Graphs Matching and Compressing Sequences of Visual Hulls. Naveen Goela
 Visual Hull Graphs Matching and Compressing Sequences of Visual Hulls by Naveen Goela Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements
Visual Hull Graphs Matching and Compressing Sequences of Visual Hulls by Naveen Goela Submitted to the Department of Electrical Engineering and Computer Science in partial fulfillment of the requirements
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Structure from Motion CSC 767
 Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
Structure from Motion CSC 767 Structure from motion Given a set of corresponding points in two or more images, compute the camera parameters and the 3D point coordinates?? R,t R 2,t 2 R 3,t 3 Camera??
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision
 Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
Fundamentals of Stereo Vision Michael Bleyer LVA Stereo Vision What Happened Last Time? Human 3D perception (3D cinema) Computational stereo Intuitive explanation of what is meant by disparity Stereo matching
EE795: Computer Vision and Intelligent Systems
 EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
EE795: Computer Vision and Intelligent Systems Spring 2012 TTh 17:30-18:45 FDH 204 Lecture 14 130307 http://www.ee.unlv.edu/~b1morris/ecg795/ 2 Outline Review Stereo Dense Motion Estimation Translational
Lecture 6 Stereo Systems Multi-view geometry
 Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Lecture 6 Stereo Systems Multi-view geometry Professor Silvio Savarese Computational Vision and Geometry Lab Silvio Savarese Lecture 6-5-Feb-4 Lecture 6 Stereo Systems Multi-view geometry Stereo systems
Silhouette Coherence for Camera Calibration under Circular Motion
 Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Silhouette Coherence for Camera Calibration under Circular Motion Carlos Hernández, Francis Schmitt and Roberto Cipolla Appendix I 2 I. ERROR ANALYSIS OF THE SILHOUETTE COHERENCE AS A FUNCTION OF SILHOUETTE
Final project bits and pieces
 Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
Final project bits and pieces The project is expected to take four weeks of time for up to four people. At 12 hours per week per person that comes out to: ~192 hours of work for a four person team. Capstone:
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Image-based rendering using plane-sweeping modelisation
 Author manuscript, published in "IAPR Machine Vision and Applications MVA2005, Japan (2005)" Image-based rendering using plane-sweeping modelisation Vincent Nozick, Sylvain Michelin and Didier Arquès Marne
Author manuscript, published in "IAPR Machine Vision and Applications MVA2005, Japan (2005)" Image-based rendering using plane-sweeping modelisation Vincent Nozick, Sylvain Michelin and Didier Arquès Marne
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
 COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
CPSC GLOBAL ILLUMINATION
 CPSC 314 21 GLOBAL ILLUMINATION Textbook: 20 UGRAD.CS.UBC.CA/~CS314 Mikhail Bessmeltsev ILLUMINATION MODELS/ALGORITHMS Local illumination - Fast Ignore real physics, approximate the look Interaction of
CPSC 314 21 GLOBAL ILLUMINATION Textbook: 20 UGRAD.CS.UBC.CA/~CS314 Mikhail Bessmeltsev ILLUMINATION MODELS/ALGORITHMS Local illumination - Fast Ignore real physics, approximate the look Interaction of
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
What Do N Photographs Tell Us About 3D Shape?
 What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape
What Do N Photographs Tell Us About 3D Shape? Kiriakos N. Kutulakos kyros@cs.rochester.edu Steven M. Seitz sseitz@microsoft.com Abstract In this paper we consider the problem of computing the 3D shape