3D Reconstruction of Dynamic Textures with Crowd Sourced Data. Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm
|
|
|
- Kelley Reynolds
- 6 years ago
- Views:
Transcription
1 3D Reconstruction of Dynamic Textures with Crowd Sourced Data Dinghuang Ji, Enrique Dunn and Jan-Michael Frahm 1



2 Background Large scale scene reconstruction Internet imagery 3D point cloud Dense geometry 2

3 Motivation No man ever steps in the same river twice. --Heraclitus No local patch ever appears in the same fountain twice 3
4 Goal Bring static scene reconstruction alive 3D shape of the dynamic scene elements More realistic (dynamic) visualizations 4



5 Related works Nelson, R., Polana, R.: Qualitative recognition of motion using temporal texture. CVGIP: Image Understanding (1992) Activities Motion Events Dynamic textures 5





6 Related works Reconstruction and rendering of Time-Varying Natural Phenomena. PhD thesis of Ivo Ihrke, Modeling Dynamic Scenes Recorded with Freely Moving Cameras. Taneja et.al. ECCV 2010 What Shape are Dolphins? Building 3D Morphable Models from 2D Images. Cashman et. Al. PAMI



7 Framework Data acquisition Rough model estimation Closed-loop modelling 7

8 Framework Data acquisition Rough model estimation Closed-loop modelling 8






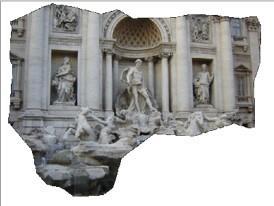
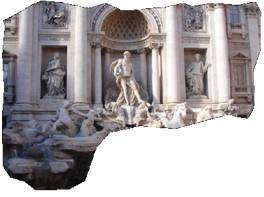
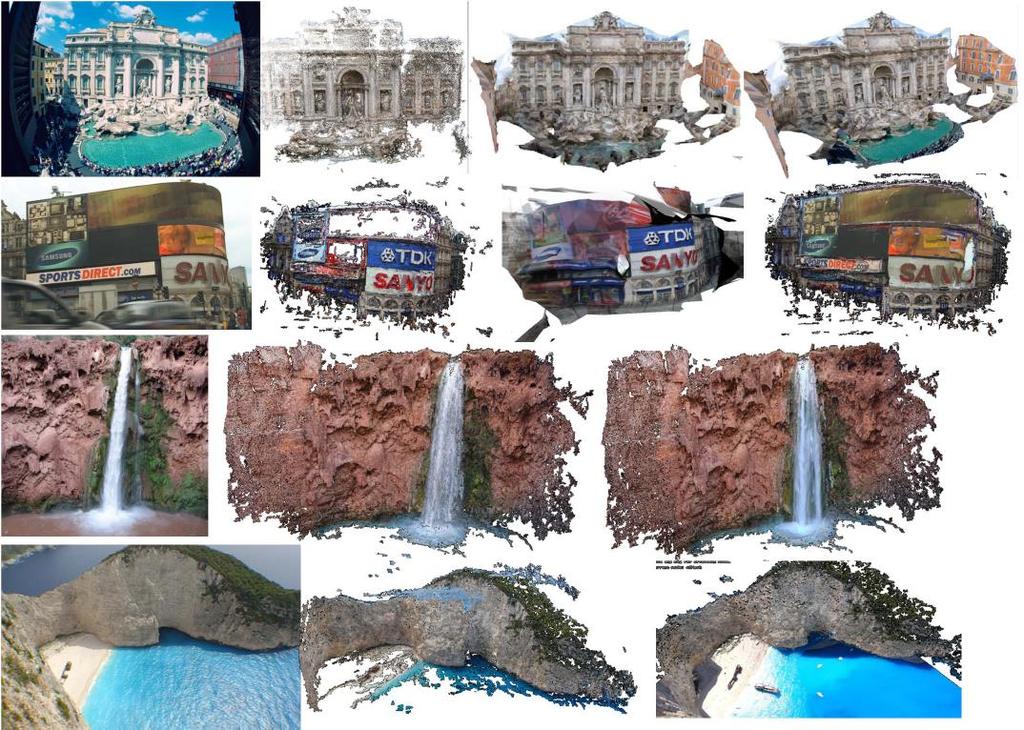
9 Image based Scene Reconstruction Generate the static background and obtain camera parameters. Trevi fountain Mooney waterfall Navagio beach Piccadilly circus billboard 9

10 Video Frame selection Select sequential video frames contain stable dynamic motions Large viewpoint change Good frame sequence Heavy occlusion Frame sample 1 Frame sample n Frame sample m 10

11 Selected video sequences 11

12 Video Frame selection Extract HOG feature, and use NCC to measure the similarity. Histogram of Gradient Normalized Cross Correlation Local cell Histogram of orientation 12
13 Framework Data acquisition Rough model estimation Closed-loop modelling 13

14 Rough model estimation Selected frame sequences Dynamic texture segmentation Shape-from-Silhouettes 14
15 Foreground mask from videos Input video sequence Input video fragment Final mask 15
16 Foreground mask from videos Homography based video stabilization Input video fragment Final mask 16
17 Foreground mask from videos Accumulated frame differencing Input video fragment Final mask 17
18 Foreground mask from videos Otsu thresholding and morphology operation Input video fragment Final mask 18
19 Foreground mask from videos Remove small connected regions (final mask) Input video fragment Final mask 19




20 Background mask from videos Feature matches between neighboring video frames Remove feature matches in foreground mask Estimate concave hull mask 20


21 Background mask estimation Alpha shape method Find the boundary of a set of points 21

 Foreground mask")
22 Original image Graph-cut segmentation mask refinement ( green: static background, red: dynamic foreground) Foreground mask Background mask 22

23 Graph-cut segmentation Two labels image segmentation Solve with min-cut/max-flow method 23


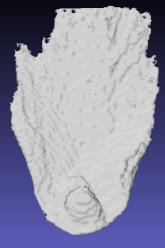
24 Initial model generation Silhouettes from videos Shape-from-Silhouettes 24

25 Classic Shape from silhouettes 25

26 Classic Shape from silhouettes 26
27 Classic Shape from silhouettes 27

28 Classic Shape from silhouettes 28

29 Shape from silhouettes Problem Some of the silhouettes are not complete, this will carve away valid part of the reconstructed object. 29
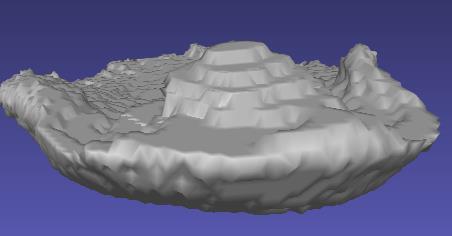
30 Shape-from-Silhouettes: accumulative volume 30

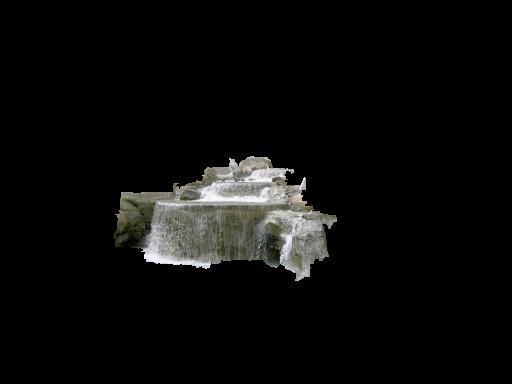
31 Visualization with texture Static background + rough model 31


32 Project back to 2D images Classic Shape from silhouettes Shape from silhouettes fusion 32
33 Framework Data acquisition Rough model estimation Closed-loop modelling 33
34 Why we use Flickr images? 1. Reuse their camera parameters generated in static reconstruction. 2. Youtube videos usually have smaller resolutions (60% videos less than 360*480). 3. Isolated images expand the camera distributions, which are critical for shape-from-silhouettes methods. 34


35 Why we use Flickr images? 1500 registered video frames 800 Flickr registered images D points with covering range 135 degree D points with covering range 287 degree 35
36 Closed-loop modelling Rough model Project to Flickr images Generate a new model iteration 36
37 Project initial model to photo collections 37


38 Background mask of images Original image in photo-collection Nearest-neighbor in GIST feature space 38

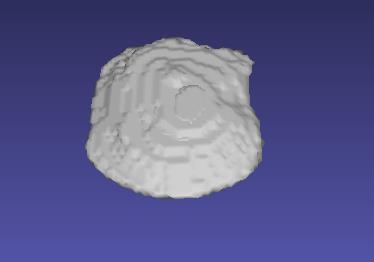
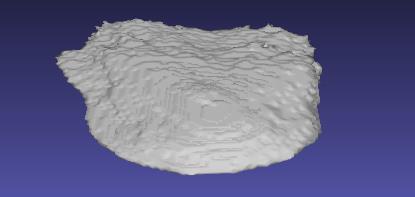
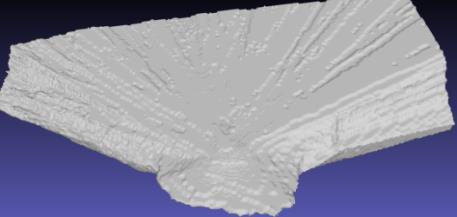
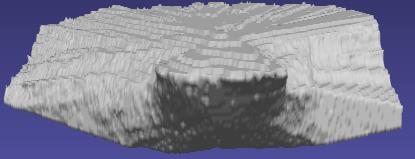
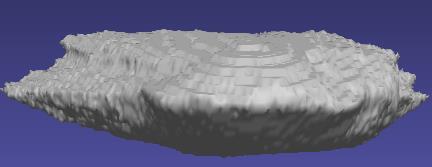
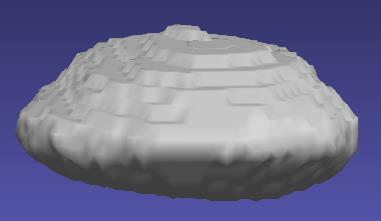
39 Closed Loop 3D Shape Refinement Iteration 1 Frontal view Top view 39

40 Closed Loop 3D Shape Refinement Iteration 2 Frontal view Top view 40


41 Closed Loop 3D Shape Refinement Iteration 3 Frontal view Top view 41


42 Closed Loop 3D Shape Refinement Iteration 4 Frontal view Top view 42


43 Closed Loop 3D Shape Refinement Iteration 5 Frontal view Top view 43


44 Closed Loop 3D Shape Refinement Iteration 6 Frontal view Top view 44
45 Closed Loop 3D Shape Refinement Iteration 7 Frontal view Top view 45
46 Closed Loop 3D Shape Refinement Iteration 8 Frontal view Top view 46


47 Closed Loop 3D Shape Refinement Iteration 9 Frontal view Top view 47

48 Problem Over-segment 48

49 Problem Over-segment (frontal view) (top view) 49

50 Shape-from-Silhouettes two-way carving shape-from-silhouettes with foreground mask Keep only occupied voxels shape-from-silhouettes with background mask 50
51 Problem Uneven camera distribution 51

52 Shape-from-Silhouettes Weighted carving 52
53 Shape-from-Silhouettes Weighted carving 150 [0,30] l i l [30,60] [60,90] [90,120] 0 camera # [120,150] [150,180] 53



54 Results Piccadilly circus without weighting Piccadilly circus with weighting Navagio beach without weighting Navagio beach with weighting 54
55 Implementation details Experiments the first iteration use an intersection ratio of 0.10, and increment a small number (i.e. 0.03) each iteration. To ensure convergence, we use a subset of wide field-ofview images and test their segmentation change. Rough initial model is generated by 15~30 video frames. Usually finished within 10 iterations, less than 5 hours. 55


56 Comparisons Experiments PMVS by Y. Furukawa et. Al multi-view stereo method for rigid structure. CMPMVS by M. Jancosek et. Al multi-view stereo method, show good results for weakly supported surface, i.e. water surface. 56
57 Dataset Experiments Keyframes sampled every 50 frames. Dataset Videos Downloaded Image Downloaded Keyframes Extracted Trevi Fountain Navagio Beach Piccadilly Circus Billboard Mooney Falls Images used for model refinement 57
58 58
59 Demos 59
60 Conclusions Initial trials on exploration of dynamic 3D reconstruction 3D reconstruction framework for Dynamic texture Robust shape-from-silhouettes method Dynamic texture cosegmentation 60
Multi-View Stereo for Static and Dynamic Scenes
 Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Multi-View Stereo for Static and Dynamic Scenes Wolfgang Burgard Jan 6, 2010 Main references Yasutaka Furukawa and Jean Ponce, Accurate, Dense and Robust Multi-View Stereopsis, 2007 C.L. Zitnick, S.B.
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
PS3 Review Session. Kuan Fang CS231A 02/16/2018
 PS3 Review Session Kuan Fang CS231A 02/16/2018 Overview Space carving Single Object Recognition via SIFT Histogram of Oriented Gradients (HOG) Space Carving Objective: Implement the process of space carving.
PS3 Review Session Kuan Fang CS231A 02/16/2018 Overview Space carving Single Object Recognition via SIFT Histogram of Oriented Gradients (HOG) Space Carving Objective: Implement the process of space carving.
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
CS 231A Computer Vision (Winter 2018) Problem Set 3
 Problem Set 3") CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
CS 231A Computer Vision (Winter 2018) Problem Set 3 Due: Feb 28, 2018 (11:59pm) 1 Space Carving (25 points) Dense 3D reconstruction is a difficult problem, as tackling it from the Structure from Motion
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
Prof. Trevor Darrell Lecture 18: Multiview and Photometric Stereo
 C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
C280, Computer Vision Prof. Trevor Darrell trevor@eecs.berkeley.edu Lecture 18: Multiview and Photometric Stereo Today Multiview stereo revisited Shape from large image collections Voxel Coloring Digital
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiview Reconstruction
 Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multiview Reconstruction Why More Than 2 Views? Baseline Too short low accuracy Too long matching becomes hard Why More Than 2 Views? Ambiguity with 2 views Camera 1 Camera 2 Camera 3 Trinocular Stereo
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model
 Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
Dynamic 3D Shape From Multi-viewpoint Images Using Deformable Mesh Model Shohei Nobuhara Takashi Matsuyama Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501, Japan {nob, tm}@vision.kuee.kyoto-u.ac.jp
Augmenting Crowd-Sourced 3D Reconstructions using Semantic Detections: Supplementary Material
 Augmenting Crowd-Sourced 3D Reconstructions using Semantic Detections: Supplementary Material True Price 1 Johannes L. Schönberger 2 Zhen Wei 1 Marc Pollefeys 2,3 Jan-Michael Frahm 1 1 Department of Computer
Augmenting Crowd-Sourced 3D Reconstructions using Semantic Detections: Supplementary Material True Price 1 Johannes L. Schönberger 2 Zhen Wei 1 Marc Pollefeys 2,3 Jan-Michael Frahm 1 1 Department of Computer
HISTOGRAMS OF ORIENTATIO N GRADIENTS
 HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
HISTOGRAMS OF ORIENTATIO N GRADIENTS Histograms of Orientation Gradients Objective: object recognition Basic idea Local shape information often well described by the distribution of intensity gradients
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video
 Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
Deformable Mesh Model for Complex Multi-Object 3D Motion Estimation from Multi-Viewpoint Video Shohei NOBUHARA Takashi MATSUYAMA Graduate School of Informatics, Kyoto University Sakyo, Kyoto, 606-8501,
3D Object Model Acquisition from Silhouettes
 4th International Symposium on Computing and Multimedia Studies 1 3D Object Model Acquisition from Silhouettes Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic Center for Computing and Media Studies
4th International Symposium on Computing and Multimedia Studies 1 3D Object Model Acquisition from Silhouettes Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic Center for Computing and Media Studies
Efficient View-Dependent Sampling of Visual Hulls
 Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
Efficient View-Dependent Sampling of Visual Hulls Wojciech Matusik Chris Buehler Leonard McMillan Computer Graphics Group MIT Laboratory for Computer Science Cambridge, MA 02141 Abstract In this paper
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING
 COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
COMPARISON OF PHOTOCONSISTENCY MEASURES USED IN VOXEL COLORING Oğuz Özün a, Ulaş Yılmaz b, Volkan Atalay a a Department of Computer Engineering, Middle East Technical University, Turkey oguz, volkan@ceng.metu.edu.tr
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Photo Tourism: Exploring Photo Collections in 3D
 Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
Photo Tourism: Exploring Photo Collections in 3D SIGGRAPH 2006 Noah Snavely Steven M. Seitz University of Washington Richard Szeliski Microsoft Research 2006 2006 Noah Snavely Noah Snavely Reproduced with
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES
 FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
FOREGROUND DETECTION ON DEPTH MAPS USING SKELETAL REPRESENTATION OF OBJECT SILHOUETTES D. Beloborodov a, L. Mestetskiy a a Faculty of Computational Mathematics and Cybernetics, Lomonosov Moscow State University,
Shape from Silhouettes
 Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Shape from Silhouettes Schedule (tentative) 2 # date topic 1 Sep.22 Introduction and geometry 2 Sep.29 Invariant features 3 Oct.6 Camera models and calibration 4 Oct.13 Multiple-view geometry 5 Oct.20
Some books on linear algebra
 Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Some books on linear algebra Finite Dimensional Vector Spaces, Paul R. Halmos, 1947 Linear Algebra, Serge Lang, 2004 Linear Algebra and its Applications, Gilbert Strang, 1988 Matrix Computation, Gene H.
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Step-by-Step Model Buidling
 Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
Step-by-Step Model Buidling Review Feature selection Feature selection Feature correspondence Camera Calibration Euclidean Reconstruction Landing Augmented Reality Vision Based Control Sparse Structure
A Systems View of Large- Scale 3D Reconstruction
 Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
Lecture 23: A Systems View of Large- Scale 3D Reconstruction Visual Computing Systems Goals and motivation Construct a detailed 3D model of the world from unstructured photographs (e.g., Flickr, Facebook)
CS 4495 Computer Vision A. Bobick. Motion and Optic Flow. Stereo Matching
 Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Stereo Matching Fundamental matrix Let p be a point in left image, p in right image l l Epipolar relation p maps to epipolar line l p maps to epipolar line l p p Epipolar mapping described by a 3x3 matrix
Multi-View 3D Reconstruction of Highly-Specular Objects
 Multi-View 3D Reconstruction of Highly-Specular Objects Master Thesis Author: Aljoša Ošep Mentor: Michael Weinmann Motivation Goal: faithful reconstruction of full 3D shape of an object Current techniques:
Multi-View 3D Reconstruction of Highly-Specular Objects Master Thesis Author: Aljoša Ošep Mentor: Michael Weinmann Motivation Goal: faithful reconstruction of full 3D shape of an object Current techniques:
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2013 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
CS5670: Computer Vision
 CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
CS5670: Computer Vision Noah Snavely Multi-view stereo Announcements Project 3 ( Autostitch ) due Monday 4/17 by 11:59pm Recommended Reading Szeliski Chapter 11.6 Multi-View Stereo: A Tutorial Furukawa
Storyline Reconstruction for Unordered Images
 Introduction: Storyline Reconstruction for Unordered Images Final Paper Sameedha Bairagi, Arpit Khandelwal, Venkatesh Raizaday Storyline reconstruction is a relatively new topic and has not been researched
Introduction: Storyline Reconstruction for Unordered Images Final Paper Sameedha Bairagi, Arpit Khandelwal, Venkatesh Raizaday Storyline reconstruction is a relatively new topic and has not been researched
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Chaplin, Modern Times, 1936
 Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Chaplin, Modern Times, 1936 [A Bucket of Water and a Glass Matte: Special Effects in Modern Times; bonus feature on The Criterion Collection set] Multi-view geometry problems Structure: Given projections
Calibrated Image Acquisition for Multi-view 3D Reconstruction
 Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Calibrated Image Acquisition for Multi-view 3D Reconstruction Sriram Kashyap M S Guide: Prof. Sharat Chandran Indian Institute of Technology, Bombay April 2009 Sriram Kashyap 3D Reconstruction 1/ 42 Motivation
Contents I IMAGE FORMATION 1
 Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
Contents I IMAGE FORMATION 1 1 Geometric Camera Models 3 1.1 Image Formation............................. 4 1.1.1 Pinhole Perspective....................... 4 1.1.2 Weak Perspective.........................
EECS 442 Computer vision. Announcements
 EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
EECS 442 Computer vision Announcements Midterm released after class (at 5pm) You ll have 46 hours to solve it. it s take home; you can use your notes and the books no internet must work on it individually
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs
 Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Tri-modal Human Body Segmentation
 Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
Tri-modal Human Body Segmentation Master of Science Thesis Cristina Palmero Cantariño Advisor: Sergio Escalera Guerrero February 6, 2014 Outline 1 Introduction 2 Tri-modal dataset 3 Proposed baseline 4
A Statistical Consistency Check for the Space Carving Algorithm.
 A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
A Statistical Consistency Check for the Space Carving Algorithm. A. Broadhurst and R. Cipolla Dept. of Engineering, Univ. of Cambridge, Cambridge, CB2 1PZ aeb29 cipolla @eng.cam.ac.uk Abstract This paper
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE
 SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
SIMPLE ROOM SHAPE MODELING WITH SPARSE 3D POINT INFORMATION USING PHOTOGRAMMETRY AND APPLICATION SOFTWARE S. Hirose R&D Center, TOPCON CORPORATION, 75-1, Hasunuma-cho, Itabashi-ku, Tokyo, Japan Commission
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
3D Computer Vision. Depth Cameras. Prof. Didier Stricker. Oliver Wasenmüller
 3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Depth Cameras Prof. Didier Stricker Oliver Wasenmüller Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Shape from Silhouettes I CV book Szelisky
 Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
Shape from Silhouettes I CV book Szelisky 11.6.2 Guido Gerig CS 6320, Spring 2012 (slides modified from Marc Pollefeys UNC Chapel Hill, some of the figures and slides are adapted from M. Pollefeys, J.S.
BSB663 Image Processing Pinar Duygulu. Slides are adapted from Selim Aksoy
 BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
BSB663 Image Processing Pinar Duygulu Slides are adapted from Selim Aksoy Image matching Image matching is a fundamental aspect of many problems in computer vision. Object or scene recognition Solving
Multi-View Reconstruction Preserving Weakly-Supported Surfaces
 Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Multi-View Reconstruction Preserving Weakly-Supported Surfaces Michal Jancosek and Tomas Pajdla Center for Machine Perception, Department of Cybernetics Faculty of Elec. Eng., Czech Technical University
Learning and Inferring Depth from Monocular Images. Jiyan Pan April 1, 2009
 Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
Learning and Inferring Depth from Monocular Images Jiyan Pan April 1, 2009 Traditional ways of inferring depth Binocular disparity Structure from motion Defocus Given a single monocular image, how to infer
TA Section 7 Problem Set 3. SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)
 Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999)") TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
TA Section 7 Problem Set 3 SIFT (Lowe 2004) Shape Context (Belongie et al. 2002) Voxel Coloring (Seitz and Dyer 1999) Sam Corbett-Davies TA Section 7 02-13-2014 Distinctive Image Features from Scale-Invariant
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Miniature faking. In close-up photo, the depth of field is limited.
 Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Miniature faking In close-up photo, the depth of field is limited. http://en.wikipedia.org/wiki/file:jodhpur_tilt_shift.jpg Miniature faking Miniature faking http://en.wikipedia.org/wiki/file:oregon_state_beavers_tilt-shift_miniature_greg_keene.jpg
Image-Based Modeling and Rendering. Image-Based Modeling and Rendering. Final projects IBMR. What we have learnt so far. What IBMR is about
 Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Image-Based Modeling and Rendering Image-Based Modeling and Rendering MIT EECS 6.837 Frédo Durand and Seth Teller 1 Some slides courtesy of Leonard McMillan, Wojciech Matusik, Byong Mok Oh, Max Chen 2
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction
 Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Discrete Optimization of Ray Potentials for Semantic 3D Reconstruction Marc Pollefeys Joined work with Nikolay Savinov, Christian Haene, Lubor Ladicky 2 Comparison to Volumetric Fusion Higher-order ray
Lecture 8 Active stereo & Volumetric stereo
 Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Lecture 8 Active stereo & Volumetric stereo Active stereo Structured lighting Depth sensing Volumetric stereo: Space carving Shadow carving Voxel coloring Reading: [Szelisky] Chapter 11 Multi-view stereo
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013
 Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Live Metric 3D Reconstruction on Mobile Phones ICCV 2013 Main Contents 1. Target & Related Work 2. Main Features of This System 3. System Overview & Workflow 4. Detail of This System 5. Experiments 6.
Topics to be Covered in the Rest of the Semester. CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester
 Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Topics to be Covered in the Rest of the Semester CSci 4968 and 6270 Computational Vision Lecture 15 Overview of Remainder of the Semester Charles Stewart Department of Computer Science Rensselaer Polytechnic
Space-time Isosurface Evolution for Temporally Coherent 3D Reconstruction
 Space-time Isosurface Evolution for Temporally Coherent 3D Reconstruction Bastian Goldluecke Marcus Magnor Max-Planck-Institut für Informatik Graphics-Optics-Vision Saarbrücken, Germany {bg,magnor}@mpii.de
Space-time Isosurface Evolution for Temporally Coherent 3D Reconstruction Bastian Goldluecke Marcus Magnor Max-Planck-Institut für Informatik Graphics-Optics-Vision Saarbrücken, Germany {bg,magnor}@mpii.de
Static Scene Reconstruction
 GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
GPU supported Real-Time Scene Reconstruction with a Single Camera Jan-Michael Frahm, 3D Computer Vision group, University of North Carolina at Chapel Hill Static Scene Reconstruction 1 Capture on campus
Volumetric stereo with silhouette and feature constraints
 Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Volumetric stereo with silhouette and feature constraints Jonathan Starck, Gregor Miller and Adrian Hilton Centre for Vision, Speech and Signal Processing, University of Surrey, Guildford, GU2 7XH, UK.
Comparison of Local Feature Descriptors
 Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Department of EECS, University of California, Berkeley. December 13, 26 1 Local Features 2 Mikolajczyk s Dataset Caltech 11 Dataset 3 Evaluation of Feature Detectors Evaluation of Feature Deriptors 4 Applications
Semantic 3D Reconstruction of Heads Supplementary Material
 Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Semantic 3D Reconstruction of Heads Supplementary Material Fabio Maninchedda1, Christian Ha ne2,?, Bastien Jacquet3,?, Amae l Delaunoy?, Marc Pollefeys1,4 1 ETH Zurich 2 UC Berkeley 3 Kitware SAS 4 Microsoft
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Shape from Silhouettes I
 Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
Shape from Silhouettes I Guido Gerig CS 6320, Spring 2015 Credits: Marc Pollefeys, UNC Chapel Hill, some of the figures and slides are also adapted from J.S. Franco, J. Matusik s presentations, and referenced
3D reconstruction how accurate can it be?
 Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
Performance Metrics for Correspondence Problems 3D reconstruction how accurate can it be? Pierre Moulon, Foxel CVPR 2015 Workshop Boston, USA (June 11, 2015) We can capture large environments. But for
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE
 PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
PEOPLE IN SEATS COUNTING VIA SEAT DETECTION FOR MEETING SURVEILLANCE Hongyu Liang, Jinchen Wu, and Kaiqi Huang National Laboratory of Pattern Recognition, Institute of Automation, Chinese Academy of Science
Visual Hull Construction in the Presence of Partial Occlusion
 Visual Hull Construction in the Presence of Partial cclusion Paper ID: 200 Abstract In this paper, we propose a visual hull algorithm, which guarantees a correct construction even in the presence of partial
Visual Hull Construction in the Presence of Partial cclusion Paper ID: 200 Abstract In this paper, we propose a visual hull algorithm, which guarantees a correct construction even in the presence of partial
3D Digitization of a Hand-held Object with a Wearable Vision Sensor
 3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
3D Digitization of a Hand-held Object with a Wearable Vision Sensor Sotaro TSUKIZAWA, Kazuhiko SUMI, and Takashi MATSUYAMA tsucky@vision.kuee.kyoto-u.ac.jp sumi@vision.kuee.kyoto-u.ac.jp tm@i.kyoto-u.ac.jp
!!!"#$%!&'()*&+,'-%%./01"&', Tokihiko Akita. AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm
*&+,'-%%./01&', Tokihiko Akita. AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm") !!!"#$%!&'()*&+,'-%%./01"&', Tokihiko Akita AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm! !"#$%&'(&)'*+%*+, -. /"0123'4*5 6.&/",70&"$2'37+89&:&;7+%3#7&
!!!"#$%!&'()*&+,'-%%./01"&', Tokihiko Akita AISIN SEIKI Co., Ltd. Parking Space Detection with Motion Stereo Camera applying Viterbi algorithm! !"#$%&'(&)'*+%*+, -. /"0123'4*5 6.&/",70&"$2'37+89&:&;7+%3#7&
Image-Based Modeling and Rendering
 Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Image-Based Modeling and Rendering Richard Szeliski Microsoft Research IPAM Graduate Summer School: Computer Vision July 26, 2013 How far have we come? Light Fields / Lumigraph - 1996 Richard Szeliski
Geometric Registration for Deformable Shapes 1.1 Introduction
 Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
Geometric Registration for Deformable Shapes 1.1 Introduction Overview Data Sources and Applications Problem Statement Overview Presenters Will Chang University of California at San Diego, USA Hao Li ETH
BIL Computer Vision Apr 16, 2014
 BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
BIL 719 - Computer Vision Apr 16, 2014 Binocular Stereo (cont d.), Structure from Motion Aykut Erdem Dept. of Computer Engineering Hacettepe University Slide credit: S. Lazebnik Basic stereo matching algorithm
arxiv: v1 [cs.cv] 28 Sep 2018
![arxiv: v1 [cs.cv] 28 Sep 2018](/thumbs/93/113542646.jpg "arxiv: v1 [cs.cv] 28 Sep 2018") Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Camera Pose Estimation from Sequence of Calibrated Images arxiv:1809.11066v1 [cs.cv] 28 Sep 2018 Jacek Komorowski 1 and Przemyslaw Rokita 2 1 Maria Curie-Sklodowska University, Institute of Computer Science,
Single-view 3D Reconstruction
 Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Single-view 3D Reconstruction 10/12/17 Computational Photography Derek Hoiem, University of Illinois Some slides from Alyosha Efros, Steve Seitz Notes about Project 4 (Image-based Lighting) You can work
Building a Panorama. Matching features. Matching with Features. How do we build a panorama? Computational Photography, 6.882
 Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
Matching features Building a Panorama Computational Photography, 6.88 Prof. Bill Freeman April 11, 006 Image and shape descriptors: Harris corner detectors and SIFT features. Suggested readings: Mikolajczyk
3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping
 74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
74 3D Surface Reconstruction from 2D Multiview Images using Voxel Mapping 1 Tushar Jadhav, 2 Kulbir Singh, 3 Aditya Abhyankar 1 Research scholar, 2 Professor, 3 Dean 1 Department of Electronics & Telecommunication,Thapar
Finally: Motion and tracking. Motion 4/20/2011. CS 376 Lecture 24 Motion 1. Video. Uses of motion. Motion parallax. Motion field
 Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Finally: Motion and tracking Tracking objects, video analysis, low level motion Motion Wed, April 20 Kristen Grauman UT-Austin Many slides adapted from S. Seitz, R. Szeliski, M. Pollefeys, and S. Lazebnik
Spatio-Temporally Consistent Correspondence for Dense Dynamic Scene Modeling
 Spatio-Temporally Consistent Correspondence for Dense Dynamic Scene Modeling Dinghuang Ji, Enrique Dunn, and Jan-Michael Frahm The University of North Carolina at Chapel Hill {jdh,dunn,jmf}@cs.unc.edu
Spatio-Temporally Consistent Correspondence for Dense Dynamic Scene Modeling Dinghuang Ji, Enrique Dunn, and Jan-Michael Frahm The University of North Carolina at Chapel Hill {jdh,dunn,jmf}@cs.unc.edu
CSE/EE-576, Final Project
 1 CSE/EE-576, Final Project Torso tracking Ke-Yu Chen Introduction Human 3D modeling and reconstruction from 2D sequences has been researcher s interests for years. Torso is the main part of the human
1 CSE/EE-576, Final Project Torso tracking Ke-Yu Chen Introduction Human 3D modeling and reconstruction from 2D sequences has been researcher s interests for years. Torso is the main part of the human
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization
 Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Multi-View Reconstruction using Narrow-Band Graph-Cuts and Surface Normal Optimization Alexander Ladikos Selim Benhimane Nassir Navab Chair for Computer Aided Medical Procedures Department of Informatics
Stereo Wrap + Motion. Computer Vision I. CSE252A Lecture 17
 Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
Stereo Wrap + Motion CSE252A Lecture 17 Some Issues Ambiguity Window size Window shape Lighting Half occluded regions Problem of Occlusion Stereo Constraints CONSTRAINT BRIEF DESCRIPTION 1-D Epipolar Search
An Evaluation of Volumetric Interest Points
 An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
An Evaluation of Volumetric Interest Points Tsz-Ho YU Oliver WOODFORD Roberto CIPOLLA Machine Intelligence Lab Department of Engineering, University of Cambridge About this project We conducted the first
3D Computer Vision. Structured Light II. Prof. Didier Stricker. Kaiserlautern University.
 3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Computer Vision Structured Light II Prof. Didier Stricker Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de 1 Introduction
3D Perception. CS 4495 Computer Vision K. Hawkins. CS 4495 Computer Vision. 3D Perception. Kelsey Hawkins Robotics
 CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
CS 4495 Computer Vision Kelsey Hawkins Robotics Motivation What do animals, people, and robots want to do with vision? Detect and recognize objects/landmarks Find location of objects with respect to themselves
Multiple-Choice Questionnaire Group C
 Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Family name: Vision and Machine-Learning Given name: 1/28/2011 Multiple-Choice naire Group C No documents authorized. There can be several right answers to a question. Marking-scheme: 2 points if all right
Occlusion Detection of Real Objects using Contour Based Stereo Matching
 Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Occlusion Detection of Real Objects using Contour Based Stereo Matching Kenichi Hayashi, Hirokazu Kato, Shogo Nishida Graduate School of Engineering Science, Osaka University,1-3 Machikaneyama-cho, Toyonaka,
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry
 3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry Bryan C. Russell et al. SIGGRAPH Asia 2013 Presented by YoungBin Kim 2014. 01. 10 Abstract Produce annotated 3D
3D Wikipedia: Using online text to automatically label and navigate reconstructed geometry Bryan C. Russell et al. SIGGRAPH Asia 2013 Presented by YoungBin Kim 2014. 01. 10 Abstract Produce annotated 3D
Tracking system. Danica Kragic. Object Recognition & Model Based Tracking
 Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Tracking system Object Recognition & Model Based Tracking Motivation Manipulating objects in domestic environments Localization / Navigation Object Recognition Servoing Tracking Grasping Pose estimation
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Fundamental Matrices from Moving Objects Using Line Motion Barcodes
 Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
Fundamental Matrices from Moving Objects Using Line Motion Barcodes Yoni Kasten (B), Gil Ben-Artzi, Shmuel Peleg, and Michael Werman School of Computer Science and Engineering, The Hebrew University of
3D Computer Vision. Dense 3D Reconstruction II. Prof. Didier Stricker. Christiano Gava
 3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
3D Computer Vision Dense 3D Reconstruction II Prof. Didier Stricker Christiano Gava Kaiserlautern University http://ags.cs.uni-kl.de/ DFKI Deutsches Forschungszentrum für Künstliche Intelligenz http://av.dfki.de
Determination of Volume Characteristics of Cells from Dynamical Microscopic Image
 JOURNAL OF APPLIED COMPUTER SCIENCE Vol. 23 No. 1 (2015), pp. 63-76 Determination of Volume Characteristics of Cells from Dynamical Microscopic Image Olga Nedzved 1,2, Sergey Ablameyko 2,3 1 Belarusian
JOURNAL OF APPLIED COMPUTER SCIENCE Vol. 23 No. 1 (2015), pp. 63-76 Determination of Volume Characteristics of Cells from Dynamical Microscopic Image Olga Nedzved 1,2, Sergey Ablameyko 2,3 1 Belarusian
Learning to generate 3D shapes
 Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
Learning to generate 3D shapes Subhransu Maji College of Information and Computer Sciences University of Massachusetts, Amherst http://people.cs.umass.edu/smaji August 10, 2018 @ Caltech Creating 3D shapes
WP1: Video Data Analysis
 Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Leading : UNICT Participant: UEDIN Fish4Knowledge Final Review Meeting - November 29, 2013 - Luxembourg Workpackage 1 Objectives Fish Detection: Background/foreground modeling algorithms able to deal with
Augmented Reality VU. Computer Vision 3D Registration (2) Prof. Vincent Lepetit
 Prof. Vincent Lepetit") Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Augmented Reality VU Computer Vision 3D Registration (2) Prof. Vincent Lepetit Feature Point-Based 3D Tracking Feature Points for 3D Tracking Much less ambiguous than edges; Point-to-point reprojection
Visual Shapes of Silhouette Sets
 Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
Visual Shapes of Silhouette Sets Jean-Sébastien Franco Marc Lapierre Edmond Boyer GRAVIR INRIA Rhône-Alpes 655, Avenue de l Europe, 38334 Saint Ismier, France {franco,lapierre,eboyer}@inrialpes.fr Abstract
3D Reconstruction from Scene Knowledge
 Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW
Multiple-View Reconstruction from Scene Knowledge 3D Reconstruction from Scene Knowledge SYMMETRY & MULTIPLE-VIEW GEOMETRY Fundamental types of symmetry Equivalent views Symmetry based reconstruction MUTIPLE-VIEW