Live modular Robots! Dr. Houxiang Zhang. Dr. Juan González-Gómez. Faculty of Mathematics, Informatics and Natural Sciences University of Hamburg
|
|
|
- Christian Wilkins
- 6 years ago
- Views:
Transcription

1 Live modular Robots! Dr. Houxiang Zhang Faculty of Mathematics, Informatics and Natural Sciences University of Hamburg Dr. Juan González-Gómez School of Engineering Universidad Autonoma de Madrid DFKI Bremen Robotics Innovation Center. Jun, 16th, 2009
2 Outline Outline 1. Introduction 2. Locomotion in 1D 3. Locomotion in 2D 4. Minimal configurations 5. Cube-M modules 6. Conclusions and current work Live modular Robots! DFKI Bremen Robotics Innovation Center. Jun, 16th,






3 The Locomotion Problem Classic approach Bio-inspired approach CMU Ambler Aramies Dante II Big Dog Modular approach Polybot 3

4 Modular Robotics Two important aspects: Robot morphology Controller 4



5 Morphology Modular Robot classification 1D Topology 2D Topology 3D Topology 1D topology sub-classification Pitch-Pitch Yaw-yaw Pitch-yaw 5


6 Controller Coordination problem: Calculation of the joint's angles to realize a gait: i t Classic approach: Mathematical modeling Calculation by inverse kinematics Disadvantages: The equations are only valid for an specific morphology CPG CPG CPG Bio-inspired controllers: CPGs Central Pattern Generators CPGs control the rhythmic activities Ej. The locomotion of the lamprey 6

7 Hypothesis: Sinusoidal oscillators CPGs are replaced by a Simplified model CPG CPG CPG Sinusoidal oscillators: 2 i t =A i sin i O i T Advantages: Few resources required 7
8 Outline Outline 1. Introduction 2. Locomotion in 1D 3. Locomotion in 2D 4. Minimal configurations 5. Cube-M modules 6. Conclusions and current work Live modular Robots! DFKI Bremen Robotics Innovation Center. Jun, 16th,


9 Y1 Modules One degree of freedom Easy to build Cheap Open and Free 9


10 Electronics & control 10

11 Cube Revolutions (I) Videos Morphology: 8 modules with pitch-pitch connection Controller: 8 equal oscillators Parameters: A,,T 11

12 Locomotion mechanism Locomotion performed by the body wave propagation Step: x V= Mean Speed: Serpenoid curve Step calculation: x T l l 2 k x= 0k cos cos s ds k l 12
13 Outline Outline 1. Introduction 2. Locomotion in 1D 3. Locomotion in 2D 4. Minimal configurations 5. Cube-M modules 6. Conclusions and current work Live modular Robots! DFKI Bremen Robotics Innovation Center. Jun, 16th,




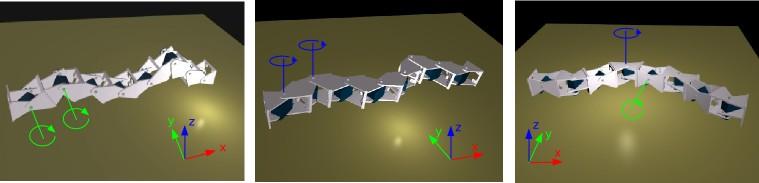
14 Hypercube (I) Demo Morphology 8 modules with pitch-yaw connection Controller: 4 vertical oscillators 4 horizontal oscillators Parameters: A h, A v, h, v, vh,t 14

15 Locomotion gaits Searching: Genetic algorithms 5 categories of gaits Characterized by the 3D body wave 15
 x length (lx) x heigth (h)")
16 Locomotion mechanism 3D Body wave propagation Linear Step: r Angular Step: Dimensions: width (w) x length (lx) x heigth (h) 16
17 Outline Outline 1. Introduction 2. Locomotion in 1D 3. Locomotion in 2D 4. Minimal configurations 5. Cube-M modules 6. Conclusions and future work Live modular Robots! DFKI Bremen Robotics Innovation Center. Jun, 16th,


18 Minimal configurations Configurations with the minimal number of modules that are able to move Searching the control space using genetic algorithms Straight line 5 gaits 18




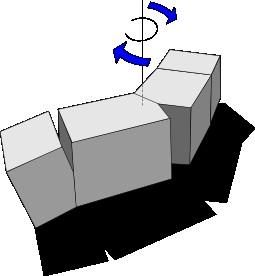
19 Minicube-I Demo Morphology 2 modules with a Pitchpitch connection Controller: Two generators Parameters: A,, T 19




20 Minicube-II Demo Morphology: 3 modules with Pitch-yawpitch connection Controller: 3 oscillators Parameters: A v,a h, v, vh, T 20









21 Locomotion gaits Forward Av =40, Ah=0 v =120 Lateral shifting Av = Ah 40 vh =90, v=0 Av = Ah 60 Turning Rotating Av =40, Ah=0 Oh =30, v =120 Rolling Av =10, Ah=40 vh =90, v=180 vh =90, v=0 21
22 Outline Outline 1. Introduction 2. Locomotion in 1D 3. Locomotion in 2D 4. Minimal configurations 5. Cube-M modules 6. Conclusions and current work Live modular Robots! DFKI Bremen Robotics Innovation Center. Jun, 16th,

23 Cube-M module(i) Low cost mechanical design Simple robust modules assembling manually and int a quick-to-build, easy-tohandle design Onboard electronics and sensors 23


24 Cube-M module (II) Demo 24

![[ODE]) Generics algorithms: PGAPack](/docs-images/77/76100451/images/25-1.jpg "Mathematical models in")
25 Software Demo 1D topology simulator (Based on Open Dynamics Engine [ODE]) Generics algorithms: PGAPack Mathematical models in Octave/Matlab 25
26 Outline Outline 1. Introduction 2. Locomotion in 1D 3. Locomotion in 2D 4. Minimal configurations 5. Cube-M modules 6. Conclusions and current work Live modular Robots! DFKI Bremen Robotics Innovation Center. Jun, 16th,
27 Conclusions The controller based on sinusoidal oscillators is valid for the locomotion of the 1D-topology modular robots Very few resources are required for its implementation The locomotion gaits are very smooth and natural At least 5 different gaits can be achieved i t =Ai sin 2 i Oi T 27



28 Current work Locomotion of 2D Topology modular robots Modular grasping Climbing caterpillar New module design 28
29 Live modular Robots! Dr. Houxiang Zhang Faculty of Mathematics, Informatics and Natural Sciences University of Hamburg Dr. Juan González-Gómez School of Engineering Universidad Autonoma de Madrid DFKI Bremen Robotics Innovation Center. Jun, 16th,
Modular robotics and locomotion Juan Gonzalez Gomez
 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. April 2006 Index Introduction to Modular robotics Starting
Praktikum: 11 Caterpillar-like robot realization
 18.272 Praktikum: 11 Caterpillar-like robot realization Lecturers Lecturers Houxiang Houxiang Zhang Zhang Manfred Manfred Grove Grove @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
18.272 Praktikum: 11 Caterpillar-like robot realization Lecturers Lecturers Houxiang Houxiang Zhang Zhang Manfred Manfred Grove Grove @Tams/hzhang Institute TAMS s http://tams-www.informatik.uni-hamburg.de/hzhang
Modular robotics and locomotion Juan Gonzalez Gomez
 Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. May 2006 Contents Introduction to robotics Introduction
Modular robotics and locomotion Juan Gonzalez Gomez School of Engineering Universidad Autonoma de Madrid (Spain) Uni Hamburg. FB Informatik. AB TAMS. May 2006 Contents Introduction to robotics Introduction
Juan Gonzalez-Gomez1, Houxiang Zhang2 & Eduardo Boemo1 Universidad Autonoma de Madrid Spain 2
 Chapter Number: X Locomotion Principles of 1D Topology Pitch and Pitch Yaw Connecting Modular Robots Juan Gonzalez-Gomez1, Houxiang Zhang2 & Eduardo Boemo1 Universidad Autonoma de Madrid Spain 2 University
Chapter Number: X Locomotion Principles of 1D Topology Pitch and Pitch Yaw Connecting Modular Robots Juan Gonzalez-Gomez1, Houxiang Zhang2 & Eduardo Boemo1 Universidad Autonoma de Madrid Spain 2 University
Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots
 24 Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots Juan Gonzalez-Gomez 1, Houxiang Zhang 2 and Eduardo Boemo 1 1 Universidad Autonoma de Madrid, 2 University of Hamburg
24 Locomotion Principles of 1D Topology Pitch and Pitch-Yaw-Connecting Modular Robots Juan Gonzalez-Gomez 1, Houxiang Zhang 2 and Eduardo Boemo 1 1 Universidad Autonoma de Madrid, 2 University of Hamburg
Centipede Robot Locomotion
 Master Project Centipede Robot Locomotion Brian Jiménez García [brian.jimenez@epfl.ch] Supervisor: Auke Jan Ikspeert Biologically Inspired Robotics Group (BIRG) Swiss Federal Institute of Technology Lausanne
Master Project Centipede Robot Locomotion Brian Jiménez García [brian.jimenez@epfl.ch] Supervisor: Auke Jan Ikspeert Biologically Inspired Robotics Group (BIRG) Swiss Federal Institute of Technology Lausanne
Intelligent Robotics Climbing robots achievements and challenging. Outline of today s lecture. Outline of today s lecture
 Intelligent Robotics Climbing robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University University of
Intelligent Robotics Climbing robots achievements and challenging Lecturer Lecturer Houxiang Houxiang Zhang Zhang TAMS, TAMS, Department Department of of Informatics Informatics University University of
OpenMRH: a Modular Robotic Hand Model Generator Plugin for OpenRAVE
 : a Modular Robotic Hand Model Generator Plugin for OpenRAVE F. Sanfilippo 1 and K. Y. Pettersen 2 1 Department of Maritime Technology and Operations, Aalesund University College, Postboks 1517, 6025 Aalesund,
: a Modular Robotic Hand Model Generator Plugin for OpenRAVE F. Sanfilippo 1 and K. Y. Pettersen 2 1 Department of Maritime Technology and Operations, Aalesund University College, Postboks 1517, 6025 Aalesund,
YaMoR and Bluemove an autonomous modular robot with Bluetooth interface for exploring adaptive locomotion
 YaMoR and Bluemove an autonomous modular robot with Bluetooth interface for exploring adaptive locomotion R. Moeckel, C. Jaquier, K. Drapel, E. Dittrich, A. Upegui, A. Ijspeert Ecole Polytechnique Fédérale
YaMoR and Bluemove an autonomous modular robot with Bluetooth interface for exploring adaptive locomotion R. Moeckel, C. Jaquier, K. Drapel, E. Dittrich, A. Upegui, A. Ijspeert Ecole Polytechnique Fédérale
Reconfigurable Robot
 Reconfigurable Robot What is a Reconfigurable Robot? Self-reconfiguring modular robots are autonomous kinematic machines with variable morphology They are able to deliberately change their own shape by
Reconfigurable Robot What is a Reconfigurable Robot? Self-reconfiguring modular robots are autonomous kinematic machines with variable morphology They are able to deliberately change their own shape by
CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES. D.E. Okhotsimski, A.K, Platonov U S S R
 Session 11 CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES Robot Implementations D.E. Okhotsimski, A.K, Platonov U S S R Abstract. The paper deals with the problem of development the multilevel
Session 11 CONTROL ALGORITHM OP THE WALKER CLIMBING OVER OBSTACLES Robot Implementations D.E. Okhotsimski, A.K, Platonov U S S R Abstract. The paper deals with the problem of development the multilevel
Evolutionary approach for developing fast and stable offline humanoid walk
 Evolutionary approach for developing fast and stable offline humanoid walk Hafez Farazi #*1, Farzad Ahmadinejad *2, Farhad Maleki #3, M.E Shiri #4 # Mathematics and Computer Science Department, Amirkabir
Evolutionary approach for developing fast and stable offline humanoid walk Hafez Farazi #*1, Farzad Ahmadinejad *2, Farhad Maleki #3, M.E Shiri #4 # Mathematics and Computer Science Department, Amirkabir
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Parameterized Controller Generation for Multiple Mode Behavior
 Parameterized Controller Generation for Multiple Mode Behavior Chaohui Gong, Matthew J. Travers, Hsien-Tang Kao and Howie Choset {chaohuig, mtravers, hkao, choset}@cmu.edu Abstract We derive and demonstrate
Parameterized Controller Generation for Multiple Mode Behavior Chaohui Gong, Matthew J. Travers, Hsien-Tang Kao and Howie Choset {chaohuig, mtravers, hkao, choset}@cmu.edu Abstract We derive and demonstrate
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT
 SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
SYNTHESIS AND RAPID PROTOTYPING OF MOTION FOR A FOUR-LEGGED MAMMAL-STRUCTURED ROBOT Macie Tronacki* Industrial Research Institute for Automation and Measurements, Warsaw, Poland Corresponding author (mtronacki@piap.pl)
Open Access The Kinematics Analysis and Configuration Optimize of Quadruped Robot. Jinrong Zhang *, Chenxi Wang and Jianhua Zhang
 Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Send Orders for Reprints to reprints@benthamscience.ae The Open Automation and Control Systems Journal, 014, 6, 1685-1690 1685 Open Access The Kinematics Analysis and Configuration Optimize of Quadruped
Towards a multi-segment ambulatory microrobot
 2 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2, Anchorage, Alaska, USA Towards a multi-segment ambulatory microrobot Katie L. Hoffman and Robert J.
2 IEEE International Conference on Robotics and Automation Anchorage Convention District May 3-8, 2, Anchorage, Alaska, USA Towards a multi-segment ambulatory microrobot Katie L. Hoffman and Robert J.
Gesture Recognition: Hand Pose Estimation. Adrian Spurr Ubiquitous Computing Seminar FS
 Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
Gesture Recognition: Hand Pose Estimation Adrian Spurr Ubiquitous Computing Seminar FS2014 27.05.2014 1 What is hand pose estimation? Input Computer-usable form 2 Augmented Reality Gaming Robot Control
UNIVERSITY OF OSLO. Faculty of Mathematics and Natural Sciences
 Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Page 1 UNIVERSITY OF OSLO Faculty of Mathematics and Natural Sciences Exam in INF3480 Introduction to Robotics Day of exam: May 31 st 2010 Exam hours: 3 hours This examination paper consists of 5 page(s).
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms
 Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Flexible Modeling and Simulation Architecture for Haptic Control of Maritime Cranes and Robotic Arms F. Sanfilippo, H. P. Hildre, V. Æsøy and H.X. Zhang Department of Maritime Technology and Operation
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble
 Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2016/17 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Theory of Robotics and Mechatronics
 Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Theory of Robotics and Mechatronics Final Exam 19.12.2016 Question: 1 2 3 Total Points: 18 32 10 60 Score: Name: Legi-Nr: Department: Semester: Duration: 120 min 1 A4-sheet (double sided) of notes allowed
Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving assistance applications on smart mobile devices
 Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Technical University of Cluj-Napoca Image Processing and Pattern Recognition Research Center www.cv.utcluj.ro Machine learning based automatic extrinsic calibration of an onboard monocular camera for driving
Extended Gait Equation for Sidewinding
 203 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-0, 203 Extended Gait Equation for Sidewinding Chaohui Gong, Matthew J. Travers, Xiaozhou Fu and Howie Choset
203 IEEE International Conference on Robotics and Automation (ICRA) Karlsruhe, Germany, May 6-0, 203 Extended Gait Equation for Sidewinding Chaohui Gong, Matthew J. Travers, Xiaozhou Fu and Howie Choset
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT
 MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT Hongjun ZHU ABSTRACT:In order to better study the trajectory of robot motion, a motion trajectory planning and simulation based
MOTION TRAJECTORY PLANNING AND SIMULATION OF 6- DOF MANIPULATOR ARM ROBOT Hongjun ZHU ABSTRACT:In order to better study the trajectory of robot motion, a motion trajectory planning and simulation based
Mimicry of Fish Swimming Patterns in a Robotic Fish
 Mimicry of Fish Swimming Patterns in a Robotic Fish Jian-Xin Xu, Qinyuan Ren, Wenchao Gao and Xue-Lei Niu Department of Electrical and Computer Engineering National University of Singapore, Singapore 117576
Mimicry of Fish Swimming Patterns in a Robotic Fish Jian-Xin Xu, Qinyuan Ren, Wenchao Gao and Xue-Lei Niu Department of Electrical and Computer Engineering National University of Singapore, Singapore 117576
Kinematics, Kinematics Chains CS 685
 Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Kinematics, Kinematics Chains CS 685 Previously Representation of rigid body motion Two different interpretations - as transformations between different coord. frames - as operators acting on a rigid body
Mobile Robots Locomotion
 Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Robot mechanics and kinematics
 University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
University of Pisa Master of Science in Computer Science Course of Robotics (ROB) A.Y. 2017/18 cecilia.laschi@santannapisa.it http://didawiki.cli.di.unipi.it/doku.php/magistraleinformatica/rob/start Robot
Kinematics of Closed Chains
 Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Chapter 7 Kinematics of Closed Chains Any kinematic chain that contains one or more loops is called a closed chain. Several examples of closed chains were encountered in Chapter 2, from the planar four-bar
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
Mechanism Kinematics and Dynamics Final Project 1. The window shield wiper For the window wiper, (1). Select the length of all links such that the wiper tip X p (t) can cover a 120 cm window width. (2).
MEAM 620: HW 1. Sachin Chitta Assigned: January 10, 2007 Due: January 22, January 10, 2007
 MEAM 620: HW 1 Sachin Chitta (sachinc@grasp.upenn.edu) Assigned: January 10, 2007 Due: January 22, 2006 January 10, 2007 1: MATLAB Programming assignment Using MATLAB, write the following functions: 1.
MEAM 620: HW 1 Sachin Chitta (sachinc@grasp.upenn.edu) Assigned: January 10, 2007 Due: January 22, 2006 January 10, 2007 1: MATLAB Programming assignment Using MATLAB, write the following functions: 1.
Inverse Kinematics. Given a desired position (p) & orientation (R) of the end-effector
 & orientation (R) of the end-effector") Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Inverse Kinematics Given a desired position (p) & orientation (R) of the end-effector q ( q, q, q ) 1 2 n Find the joint variables which can bring the robot the desired configuration z y x 1 The Inverse
Locomotion of Snake Robot through the Pipe
 Journal of Automation and Control, 2015, Vol. 3, No. 3, 135-139 Available online at http://pubs.sciepub.com/automation/3/3/20 Science and Education Publishing DOI:10.12691/automation-3-3-20 Locomotion
Journal of Automation and Control, 2015, Vol. 3, No. 3, 135-139 Available online at http://pubs.sciepub.com/automation/3/3/20 Science and Education Publishing DOI:10.12691/automation-3-3-20 Locomotion
Manipulator trajectory planning
 Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Manipulator trajectory planning Václav Hlaváč Czech Technical University in Prague Faculty of Electrical Engineering Department of Cybernetics Czech Republic http://cmp.felk.cvut.cz/~hlavac Courtesy to
Kinematics: Intro. Kinematics is study of motion
 Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics is study of motion Kinematics: Intro Concerned with mechanisms and how they transfer and transform motion Mechanisms can be machines, skeletons, etc. Important for CG since need to animate complex
Kinematics. Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position.
 Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Kinematics Kinematics analyzes the geometry of a manipulator, robot or machine motion. The essential concept is a position. 1/31 Statics deals with the forces and moments which are aplied on the mechanism
Introduction to Robotics
 Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Introduction to Robotics Ph.D. Antonio Marin-Hernandez Artificial Intelligence Department Universidad Veracruzana Sebastian Camacho # 5 Xalapa, Veracruz Robotics Action and Perception LAAS-CNRS 7, av du
Task Priority Grasping and Locomotion Control of Modular Robot
 Task Priority Grasping and Locomotion Control of Modular Robot G. Salvietti, H.X. Zhang, J. Gonzalez-Gòmez, D. Prattichizzo, J.W. Zhang Abstract This paper presents modular robots for grasping manipulation
Task Priority Grasping and Locomotion Control of Modular Robot G. Salvietti, H.X. Zhang, J. Gonzalez-Gòmez, D. Prattichizzo, J.W. Zhang Abstract This paper presents modular robots for grasping manipulation
Kinematics and dynamics analysis of micro-robot for surgical applications
 ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
ISSN 1 746-7233, England, UK World Journal of Modelling and Simulation Vol. 5 (2009) No. 1, pp. 22-29 Kinematics and dynamics analysis of micro-robot for surgical applications Khaled Tawfik 1, Atef A.
Control of Snake Like Robot for Locomotion and Manipulation
 Control of Snake Like Robot for Locomotion and Manipulation MYamakita 1,, Takeshi Yamada 1 and Kenta Tanaka 1 1 Tokyo Institute of Technology, -1-1 Ohokayama, Meguro-ku, Tokyo, Japan, yamakita@ctrltitechacjp
Control of Snake Like Robot for Locomotion and Manipulation MYamakita 1,, Takeshi Yamada 1 and Kenta Tanaka 1 1 Tokyo Institute of Technology, -1-1 Ohokayama, Meguro-ku, Tokyo, Japan, yamakita@ctrltitechacjp
Self Assembly of Modular Manipulators with Active and Passive Modules
 Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Self Assembly of Modular Manipulators with Active and Passive Modules Seung-kook Yun and Daniela Rus Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology, Cambridge,
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Kinematics Model of Snake Robot Considering Snake Scale
 American Journal of Applied Sciences 7 (5): 669-67, 2010 ISSN 156-9239 2010Science Publications Kinematics Model of Snake Robot Considering Snake Scale Raisuddin Khan, M. Watanabe and A.A. Shafie Department
American Journal of Applied Sciences 7 (5): 669-67, 2010 ISSN 156-9239 2010Science Publications Kinematics Model of Snake Robot Considering Snake Scale Raisuddin Khan, M. Watanabe and A.A. Shafie Department
Chapter 1: Introduction
 Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Chapter 1: Introduction This dissertation will describe the mathematical modeling and development of an innovative, three degree-of-freedom robotic manipulator. The new device, which has been named the
Mobile Robotics. Marcello Restelli. Dipartimento di Elettronica e Informazione Politecnico di Milano tel:
 Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Mobile Robotics Robotica for Computer Engineering students A.A. 2006/2007
Marcello Restelli Dipartimento di Elettronica e Informazione Politecnico di Milano email: restelli@elet.polimi.it tel: 02-2399-3470 Mobile Robotics Robotica for Computer Engineering students A.A. 2006/2007
Introduction to Robotics
 Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Université de Strasbourg Introduction to Robotics Bernard BAYLE, 2013 http://eavr.u-strasbg.fr/ bernard Modelling of a SCARA-type robotic manipulator SCARA-type robotic manipulators: introduction SCARA-type
Section 5.4: Modeling with Circular Functions
 Section 5.4: Modeling with Circular Functions Circular Motion Example A ferris wheel with radius 25 feet is rotating at a rate of 3 revolutions per minute, When t = 0, a chair starts at its lowest point
Section 5.4: Modeling with Circular Functions Circular Motion Example A ferris wheel with radius 25 feet is rotating at a rate of 3 revolutions per minute, When t = 0, a chair starts at its lowest point
Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm
 The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems October 18-22, 2010, Taipei, Taiwan Motion Planning for Dynamic Knotting of a Flexible Rope with a High-speed Robot Arm Yuji
Basilio Bona ROBOTICA 03CFIOR 1
 Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Kinematic chains 1 Readings & prerequisites Chapter 2 (prerequisites) Reference systems Vectors Matrices Rotations, translations, roto-translations Homogeneous representation of vectors and matrices Chapter
Mobile Robotics. Mathematics, Models, and Methods. HI Cambridge. Alonzo Kelly. Carnegie Mellon University UNIVERSITY PRESS
 Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Mobile Robotics Mathematics, Models, and Methods Alonzo Kelly Carnegie Mellon University HI Cambridge UNIVERSITY PRESS Contents Preface page xiii 1 Introduction 1 1.1 Applications of Mobile Robots 2 1.2
Jacobian: Velocities and Static Forces 1/4
 Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Jacobian: Velocities and Static Forces /4 Advanced Robotic - MAE 6D - Department of Mechanical & Aerospace Engineering - UCLA Kinematics Relations - Joint & Cartesian Spaces A robot is often used to manipulate
Modular Model of Snake Robot
 INDIAN INSTITUTE OF TECHNOLOGY, GUWAHATI EE304 DESIGN LABORATORY PROJECT REPORT Modular Model of Snake Robot Guide: Dr. Prithwijit Guha, Assistant Professor, IIT Guwahati Name Swapnil Gupta 120108036 Somitra
INDIAN INSTITUTE OF TECHNOLOGY, GUWAHATI EE304 DESIGN LABORATORY PROJECT REPORT Modular Model of Snake Robot Guide: Dr. Prithwijit Guha, Assistant Professor, IIT Guwahati Name Swapnil Gupta 120108036 Somitra
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2005-06 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
MTRX4700 Experimental Robotics
 MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
MTRX 4700 : Experimental Robotics Lecture 2 Stefan B. Williams Slide 1 Course Outline Week Date Content Labs Due Dates 1 5 Mar Introduction, history & philosophy of robotics 2 12 Mar Robot kinematics &
Lab 2A Finding Position and Interpolation with Quaternions
 Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Lab 2A Finding Position and Interpolation with Quaternions In this Lab we will learn how to use the RVIZ Robot Simulator, Python Programming Interpreter and ROS tf library to study Quaternion math. There
Robotics Configuration of Robot Manipulators
 Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
Robotics Configuration of Robot Manipulators Configurations for Robot Manipulators Cartesian Spherical Cylindrical Articulated Parallel Kinematics I. Cartesian Geometry Also called rectangular, rectilinear,
Introduction To Robotics (Kinematics, Dynamics, and Design)
") Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Introduction To Robotics (Kinematics, Dynamics, and Design) SESSION # 5: Concepts & Defenitions Ali Meghdari, Professor School of Mechanical Engineering Sharif University of Technology Tehran, IRAN 11365-9567
Climbing and Descending Control of a Snake Robot on Step Environments based on Kinematics
 13 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 13. Tokyo, Japan Climbing and Descending Control of a Snake Robot on Step Environments based on Kinematics Motoyasu
13 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) November 3-7, 13. Tokyo, Japan Climbing and Descending Control of a Snake Robot on Step Environments based on Kinematics Motoyasu
 Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
Industrial Sections: 1.Robot Anatomy and Related Attributes 2.Robot Control Systems 3.End Effectors 4.Sensors in 5.Industrial Robot Applications 6.Robot Programming 7.Robot Accuracy and Repeatability Industrial
ME 115(b): Final Exam, Spring
: Final Exam, Spring") ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
ME 115(b): Final Exam, Spring 2011-12 Instructions 1. Limit your total time to 5 hours. That is, it is okay to take a break in the middle of the exam if you need to ask me a question, or go to dinner,
Quaternions & Rotation in 3D Space
 Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
Quaternions & Rotation in 3D Space 1 Overview Quaternions: definition Quaternion properties Quaternions and rotation matrices Quaternion-rotation matrices relationship Spherical linear interpolation Concluding
INSTITUTE OF AERONAUTICAL ENGINEERING
 Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
Name Code Class Branch Page 1 INSTITUTE OF AERONAUTICAL ENGINEERING : ROBOTICS (Autonomous) Dundigal, Hyderabad - 500 0 MECHANICAL ENGINEERING TUTORIAL QUESTION BANK : A7055 : IV B. Tech I Semester : MECHANICAL
A Hybrid Software Platform for Sony AIBO Robots
 A Hybrid Software Platform for Sony AIBO Robots Dragos Golubovic, Bo Li, Huosheng Hu Department of Computer Science, University of Essex, Wivenhoe Park, Colchester CO4 3SQ, United Kingdom Email: {dgolub,
A Hybrid Software Platform for Sony AIBO Robots Dragos Golubovic, Bo Li, Huosheng Hu Department of Computer Science, University of Essex, Wivenhoe Park, Colchester CO4 3SQ, United Kingdom Email: {dgolub,
MATH 1113 Exam 3 Review. Fall 2017
 MATH 1113 Exam 3 Review Fall 2017 Topics Covered Section 4.1: Angles and Their Measure Section 4.2: Trigonometric Functions Defined on the Unit Circle Section 4.3: Right Triangle Geometry Section 4.4:
MATH 1113 Exam 3 Review Fall 2017 Topics Covered Section 4.1: Angles and Their Measure Section 4.2: Trigonometric Functions Defined on the Unit Circle Section 4.3: Right Triangle Geometry Section 4.4:
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering
 PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
PR 5 Robot Dynamics & Control /8/7 PR 5: Robot Dynamics & Control Robot Inverse Kinematics Asanga Ratnaweera Department of Mechanical Engieering The Inverse Kinematics The determination of all possible
6-dof Eye-vergence visual servoing by 1-step GA pose tracking
 International Journal of Applied Electromagnetics and Mechanics 52 (216) 867 873 867 DOI 1.3233/JAE-16225 IOS Press 6-dof Eye-vergence visual servoing by 1-step GA pose tracking Yu Cui, Kenta Nishimura,
International Journal of Applied Electromagnetics and Mechanics 52 (216) 867 873 867 DOI 1.3233/JAE-16225 IOS Press 6-dof Eye-vergence visual servoing by 1-step GA pose tracking Yu Cui, Kenta Nishimura,
Singularity Analysis of an Extensible Kinematic Architecture: Assur Class N, Order N 1
 David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
David H. Myszka e-mail: dmyszka@udayton.edu Andrew P. Murray e-mail: murray@notes.udayton.edu University of Dayton, Dayton, OH 45469 James P. Schmiedeler The Ohio State University, Columbus, OH 43210 e-mail:
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
DETC THREE-DIMENSIONAL KINEMATIC ANALYSIS OF THE ACTUATED SPOKE WHEEL ROBOT. September 10-13, 2006, Philadelphia, Pennsylvania, USA
 Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
Proceedings Proceedings of IDETC/CIE of IDETC 06 2006 ASME 2006 ASME International International Design Design Engineering Engineering Technical Technical Conferences Conferences & September Computers
WEEKS 1-2 MECHANISMS
 References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
References WEEKS 1-2 MECHANISMS (METU, Department of Mechanical Engineering) Text Book: Mechanisms Web Page: http://www.me.metu.edu.tr/people/eres/me301/in dex.ht Analitik Çözümlü Örneklerle Mekanizma
Practical Robotics (PRAC)
") Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Practical Robotics (PRAC) A Mobile Robot Navigation System (1) - Sensor and Kinematic Modelling Nick Pears University of York, Department of Computer Science December 17, 2014 nep (UoY CS) PRAC Practical
Operation Trajectory Control of Industrial Robots Based on Motion Simulation
 Operation Trajectory Control of Industrial Robots Based on Motion Simulation Chengyi Xu 1,2, Ying Liu 1,*, Enzhang Jiao 1, Jian Cao 2, Yi Xiao 2 1 College of Mechanical and Electronic Engineering, Nanjing
Operation Trajectory Control of Industrial Robots Based on Motion Simulation Chengyi Xu 1,2, Ying Liu 1,*, Enzhang Jiao 1, Jian Cao 2, Yi Xiao 2 1 College of Mechanical and Electronic Engineering, Nanjing
Mechanism Kinematics and Dynamics
 Mechanism Kinematics and Dynamics Final Project Presentation 10:10-13:00, 12/21 and 12/28 1. The window shield wiper (2) For the window wiper in Fig.1.33 on p.26 of the PPT, (1). Select the length of all
Mechanism Kinematics and Dynamics Final Project Presentation 10:10-13:00, 12/21 and 12/28 1. The window shield wiper (2) For the window wiper in Fig.1.33 on p.26 of the PPT, (1). Select the length of all
Anatomy-based organization of morphology and control in self-reconfigurable modular robots
 Neural Comput & Applic (2010) 19:787 805 DOI 10.1007/s00521-010-0387-3 SWARM ROBOTICS Anatomy-based organization of morphology and control in self-reconfigurable modular robots David Johan Christensen
Neural Comput & Applic (2010) 19:787 805 DOI 10.1007/s00521-010-0387-3 SWARM ROBOTICS Anatomy-based organization of morphology and control in self-reconfigurable modular robots David Johan Christensen
Non-Differentiable Image Manifolds
 The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
The Multiscale Structure of Non-Differentiable Image Manifolds Michael Wakin Electrical l Engineering i Colorado School of Mines Joint work with Richard Baraniuk, Hyeokho Choi, David Donoho Models for
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
ISE 422/ME 478/ISE 522 Robotic Systems
 ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
ISE 422/ME 478/ISE 522 Robotic Systems Overview of Course R. Van Til Industrial & Systems Engineering Dept. Oakland University 1 What kind of robots will be studied? This kind Not this kind 2 Robots Used
Quaternions and Rotations
 CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
CSCI 520 Computer Animation and Simulation Quaternions and Rotations Jernej Barbic University of Southern California 1 Rotations Very important in computer animation and robotics Joint angles, rigid body
ROBOTICS 9/2/2015. Last and First Name Matricola
 ROBOTICS 9/2/2015 Last and First Name Matricola PART 1 - QUIZ (8 marks) 1. The geometric specification of the robot working space - considers the last 3 degrees of freedom of a manipulator T F - is only
ROBOTICS 9/2/2015 Last and First Name Matricola PART 1 - QUIZ (8 marks) 1. The geometric specification of the robot working space - considers the last 3 degrees of freedom of a manipulator T F - is only
Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA ABSTRACT
 Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA Development of arm controller for robotic satellite servicing demonstrations Kristina Monakhova University at Buffalo, the
Proceedings of the 2013 SpaceVision Conference November 7-10 th, Tempe, AZ, USA Development of arm controller for robotic satellite servicing demonstrations Kristina Monakhova University at Buffalo, the
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Advanced Vision Guided Robotics. David Bruce Engineering Manager FANUC America Corporation
 Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
Advanced Vision Guided Robotics David Bruce Engineering Manager FANUC America Corporation Traditional Vision vs. Vision based Robot Guidance Traditional Machine Vision Determine if a product passes or
CSIS 0801 Final Year Project. Implementation of An Intelligent Hexapod Robot. Individual Final Report - Kinematics
 CSIS 0801 Final Year Project Implementation of An Intelligent Hexapod Robot Individual Final Report - Kinematics FYP Account: fyp14013 Name: Yip Sit Wun (Terry) UID: 3035009744 HKU CS FYP14013 Implementation
CSIS 0801 Final Year Project Implementation of An Intelligent Hexapod Robot Individual Final Report - Kinematics FYP Account: fyp14013 Name: Yip Sit Wun (Terry) UID: 3035009744 HKU CS FYP14013 Implementation
Motion Simulation of a Modular Robotic System
 Motion Simulation of a Modular Robotic System Haruhisa KUROKAWA, Kohji TOMITA, Eiichi YOSHIDA, Satoshi MURATA and Shigeru KOKAJI Mechanical Engineering Laboratory, AIST, MITI Namiki 1-2, Tsukuba, Ibaraki
Motion Simulation of a Modular Robotic System Haruhisa KUROKAWA, Kohji TOMITA, Eiichi YOSHIDA, Satoshi MURATA and Shigeru KOKAJI Mechanical Engineering Laboratory, AIST, MITI Namiki 1-2, Tsukuba, Ibaraki
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis
 Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
Manipulator Path Control : Path Planning, Dynamic Trajectory and Control Analysis Motion planning for industrial manipulators is a challenging task when obstacles are present in the workspace so that collision-free
TRAINING A ROBOTIC MANIPULATOR
 ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
ME 4773/5493 Fundamental of Robotics Fall 2016 San Antonio, TX, USA TRAINING A ROBOTIC MANIPULATOR Jonathan Sackett Dept. of Mechanical Engineering San Antonio, TX, USA 78249 jonathan.sackett@utsa.edu
METR 4202: Advanced Control & Robotics
 Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Position & Orientation & State t home with Homogenous Transformations METR 4202: dvanced Control & Robotics Drs Surya Singh, Paul Pounds, and Hanna Kurniawati Lecture # 2 July 30, 2012 metr4202@itee.uq.edu.au
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks
 Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
Inverse Kinematics for Humanoid Robots Using Artificial Neural Networks Javier de Lope, Rafaela González-Careaga, Telmo Zarraonandia, and Darío Maravall Department of Artificial Intelligence Faculty of
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
Non-holonomic Planning
 Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Non-holonomic Planning Jane Li Assistant Professor Mechanical Engineering & Robotics Engineering http://users.wpi.edu/~zli11 Recap We have learned about RRTs. q new q init q near q rand But the standard
Optimization of Six Bar Knee Linkage for Stability of Knee Prosthesis
 Optimization of Six Bar Knee Linkage for Stability of Knee Prosthesis Narjes.Ghaemi 1, Morteza. Dardel 2, Mohammad Hassan Ghasemi 3, Hassan.Zohoor 4, 1- M.sc student, Babol Noshirvani University of Technology,
Optimization of Six Bar Knee Linkage for Stability of Knee Prosthesis Narjes.Ghaemi 1, Morteza. Dardel 2, Mohammad Hassan Ghasemi 3, Hassan.Zohoor 4, 1- M.sc student, Babol Noshirvani University of Technology,
Path planning and kinematics simulation of surfacing cladding for hot forging die
 MATEC Web of Conferences 21, 08005 (2015) DOI: 10.1051/matecconf/20152108005 C Owned by the authors, published by EDP Sciences, 2015 Path planning and kinematics simulation of surfacing cladding for hot
MATEC Web of Conferences 21, 08005 (2015) DOI: 10.1051/matecconf/20152108005 C Owned by the authors, published by EDP Sciences, 2015 Path planning and kinematics simulation of surfacing cladding for hot
Lecture «Robot Dynamics»: Multi-body Kinematics
 Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Lecture «Robot Dynamics»: Multi-body Kinematics 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco
Introduction to Mobile Robotics
 Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard 1/29 Some examples of mobile robots
Introduction to Mobile Robotics Olivier Aycard Associate Professor University of Grenoble Laboratoire d Informatique de Grenoble http://membres-liglab.imag.fr/aycard 1/29 Some examples of mobile robots
Lecture «Robot Dynamics»: Kinematics 3
 Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,
Lecture «Robot Dynamics»: Kinematics 3 151-0851-00 V lecture: CAB G11 Tuesday 10:15 12:00, every week exercise: HG E1.2 Wednesday 8:15 10:00, according to schedule (about every 2nd week) Marco Hutter,