The Jitterbug Motion
|
|
|
- Job Kelley
- 5 years ago
- Views:
Transcription
1 The By 80-4 Poplar St. Rochester, NY 460 Copyright, September
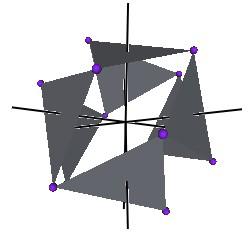
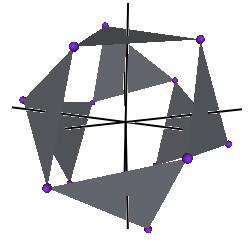
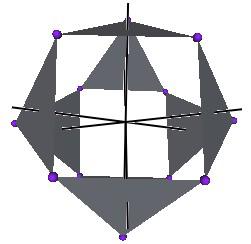
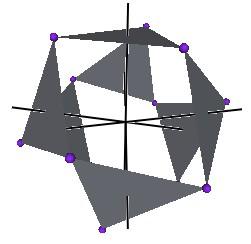
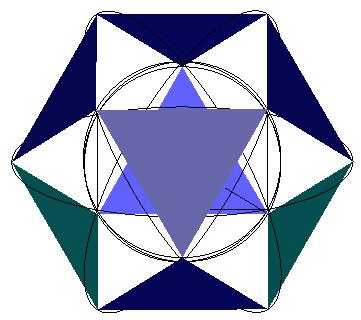
2 Introduction We develop a set of equations which describes the motion of a triangle and a vertex of the Jitterbug. The Jitterbug starts in the opened position of a Cuboctahedron (also called the Vector Equilibrium or VE) with 8 triangle faces, 6 square faces, and vertices, and closes into an Octahedron position with 8 triangle faces and 6 vertices. (See Figure #.) The Jitterbug motion is visually complex but simple when you focus only on the motion of one of the 8 triangles. The motion of a triangle is simply a radial displacement plus a rotation around the radial displacement vector. Because the triangular faces do not change size as they move radially and rotate, the vertices of a triangle are always on the surface of a cylinder. (See Figure #.) The cylinder is axially aligned with the displacement vector. That is, with a line passing through the Octahedron s (and VE s) center of volume out through the triangle s face center point. There are 4 axes of rotation (two opposite triangular faces per axis) so there are 4 fixed cylinders within which the triangles move. The reason that the motion appears complex is because the Jitterbug is often demonstrated by holding the top and bottom triangles fixed while pumping the model. This causes the remaining 6 triangles to move radially in and out, rotate and orbit about the up and down pumping axis. By allowing all 8 triangles to move in the same way, that is, not fixing any of the 8 triangles, the motion is simplified. Copyright Sept. 00

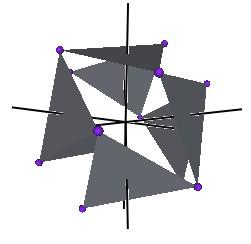
3 Figure # Copyright Sept. 00

4 Figure # within cylinders. Copyright Sept. 00
5 Development of Vertex Motion Equations We first note that since the 8 triangles of the Jitterbug during its motion do not change size, and since they move radially as they rotate, the vertices of any of the 8 triangles are constrained to move on the surface of a cylinder. Second, from the symmetry of the Octahedron and the Jitterbug, each of the vertices of the Jitterbug is constrained to move in a plane. This can be seen in Figure #. Thirdly, a plane cutting through a cylinder defines an ellipse. Therefore, each of the vertices of the Jitterbug traverses a portion of an ellipse. Figure # Path of a vertex In Figure # we can see a portion of this ellipse as well as one triangle of the Jitterbug in the Octahedron and the VE position. The ellipse shown is in the YZ-plane. The surrounding cylinder is along the V-axis. Note that since the Octahedron is centered at (0, 0, 0) then so too is the ellipse. Copyright Sept. 00 4
6 The equation of an ellipse, centered at the coordinate origin (0, 0, 0), is given by Y b + Z a where a semimajor axis length and b semiminor axis length. Figure #4 Semimajor and semiminor axes lengths From Figure #, we see that the semimajor axis length, from the coordinate origin to the vertex of the VE positioned triangle, is the edge length of the Tetrahedron (and of the VE) defined by the VE triangle and the center of volume. This length is given by a EL Note that since the ellipse is defined on the surface of the cylinder, then the ellipse width must match the cylinder diameter. This means that the semiminor axis length is just the radius of the cylinder, which is the distance from the face center of a triangle to its vertex b EL We can now write the equation for the ellipse which a vertex of the Jitterbug will follow. () Y EL Z + EL where EL is the edge length of the Octahedron, which is also the edge length of the VE. The eccentricity of an ellipse is defined by the equation Copyright Sept. 00 5
7 e b a Using the above values for a and b: a EL b EL so that we get b / a (/) / / e The coordinates for the focus points are (0, ae) and (0, ae) in the YZ-plane. These evaluate to and 0, ( 0.0, EL) 0, ( 0.0, EL) The usual motion of the Jitterbug consists of the vertices moving from the Octahedron to the VE position and back to the Octahedron position. Then only a portion of the ellipse is traversed by the vertices. Figure #5 Jitterbug portion of ellipse Copyright Sept. 00 6

8 Figure #6 Orientation of the axes Figure #6 shows the various axes and their orientations used in the following derivations. It is important to note that there are two axes of rotations used in the derivations. The first axis is the V-axis shown in Figure # and Figure #6. It is the axis about which the Jitterbug triangle rotates. The second axis is the X-axis of Figure #6 and Figure #7. The X-axis rotates the ellipse radius (labeled r in Figure #7) around the ellipse. It is important to note that an angular of rotation γ about the V-axis does not equal the same angular amount of rotation θ about the X-axis. γ θ Figure #7 Orientation of ellipse and cylinder Copyright Sept. 00 7
9 We will shortly derive relations which will let us convert a Jitterbug s triangle angular rotation γ from the ellipse radius sweep angle θ and visa versa. (Note that I am using the term ellipse radius very loosely here. The ellipse does not have a radius. However, the word radius makes it easy to refer to a line segments with one end at the coordinate origin and the other end on the perimeter of the ellipse.) Considering Figure #7, we have defined the ellipse to be in the YZ-plane. The cylinder has its axial symmetry axis along the V axis and the W axis of the cylinder is perpendicular to the V and to the Y axes. The left side of Figure #7 is rotated about the Z axis to get the right side of the Figure. Note that both coordinate systems (X, Y, Z) and (W, Y, V) share the same Y-axis. We now want to calculate the Z and Y component of the ellipse radius r, which has been rotated by the angular amount θ about the X-axis (so it remains in the YZ-plane.) From the ellipse equation above, we can write () Y + Z EL We note that r Y + Z and that r (θ) Z so r Z / (θ) This gives the equation Y + Z Z / (θ) Y Z / (θ) Z Using this in equation () and solving for Z, we get Z / (θ) Z + Z EL Copyright Sept. 00 8
10 Z EL Using this equation and equation (), we can solve for Y Y EL sin We need a relation relating θ to γ which is the angular amount a triangle is rotated about the V-axis. The angle which the YZ-plane makes with the V axis is labeled α in Figure #. This is the half-cone angle of the Tetrahedron in the VE. This angle is known to be α arc which makes the angle β (see Figure #) β arcsin We then have o ( β) sin ( β) Now, W Z (β) Using this in equation () we get () Y + Z EL Y (/)EL W With tan(γ) Y/W so that Copyright Sept. 00 9
11 we get tan (γ) Y /W EL W tan EL W W 9 6 tan ( θ) tan tan ( θ) tan() θ tan We can use a trigonometric identity tan (A) (/ (A)) to rewrite this as ( / (γ)) ( ( / (θ)) ) ( / (γ)) ( / (θ)) / (γ) ( / (θ)) / (γ) ( / (θ)) (θ) / (θ) / (γ) ( (θ)) / (θ) (γ) (θ) / ( (θ)) Solving for (θ), we get + We can then write Z as a function of the Jitterbug rotation angle γ Z EL EL Z Copyright Sept. 00 0
12 Z EL ( ( )) ( ) γ + γ ( ) + γ Z EL Z EL ( + ) 6 Z EL We now calculate the position of the Jitterbug triangle along the V-axis. This is the axis around which a single triangle rotates and moves radially. From Figure #7 we have Which means () V Z sin(β) V EL This equation gives the distance that the Jitterbug triangle is from the center of volume as it rotates around the V-axis. The angular range is 60 γ 60, with γ 60 is one Octahedron position, γ 0 is the VE position and γ 60 is the other Octahedron position. Copyright Sept. 00
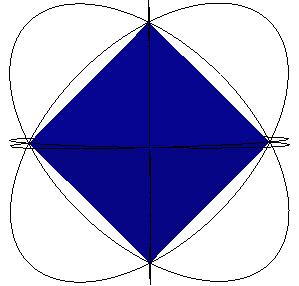
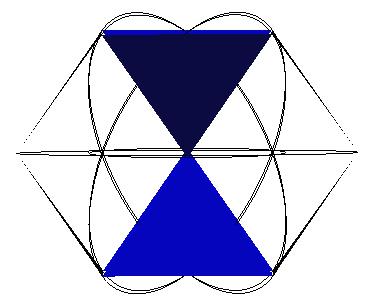
13 The Jitterbug Ellipses In Figure #8, the Jitterbug portion is the actual path that vertices will travel (direction of travel is not considered here.) No vertex of the Jitterbug (when considering only the Octahedron to VE to Octahedron motion) traverses that portion of the ellipse curve which is within the Square cross section of Octahedron portion of the ellipse. (See Figure #8.) Later in this paper we will consider what happens if the vertices are allowed to move around the complete ellipse. Figure #8 Ellipse and Octahedron edges Figure #8 shows the complete ellipse in the YZ-plane with the usual Jitterbug vertex path portion of the ellipse marked. In the following sections of this paper we will explore the consequences of allowing the vertices of the Jitterbug to orbit around the entire ellipse. Note that there are diametrically opposite Jitterbug vertices per ellipse which travel in the same direction. So there are two Jitterbug portions to the ellipse. Since there are vertices to the Jitterbug (not in the Octahedron position) then there are / 6 total ellipses for the Jitterbug. Copyright Sept. 00
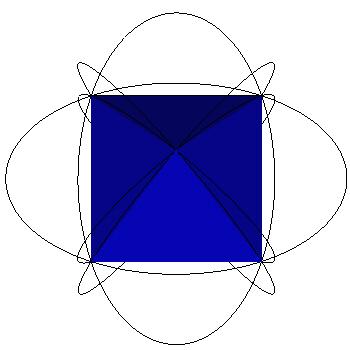
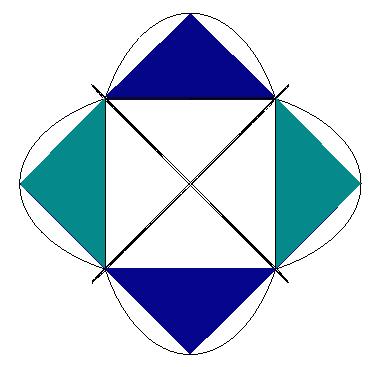
14 Note that the angular range traversed by a vertex along the ellipse in the YZ-plane is 45 θ 45 All four of the square s edges in the ellipse of Figure #8 are Octahedron edges. Each pair of opposite edges of the Octahedron is part of an ellipse. Therefore, there are two orthogonal ellipses in the same plane. Figure #9 shows both ellipses defined by the motion of 4 Jitterbug vertices. Figure #9 Two ellipse per plane Following only one vertex (one vertex of a rotating Jitterbug triangle) and with the Jitterbug in the Octahedron position, we label the initial vertex position P. This vertex will travel along the ellipse, passing through an Iahedron position, to reach vertex position P, the VE vertex position. Then, with the Jitterbug triangle continuing to rotate in the same direction, the Jitterbug vertex passes through another Iahedron vertex position to reach the Octahedron position P. (Further details relating the Jitterbug vertex position along the ellipse and various polyhedra are given below.) Note that if the Jitterbug triangles were allowed to continue to rotate in the same direction then Copyright Sept. 00
15 the vertex now at vertex position P would not proceed to vertex position P4. Instead, is leaves this plane to follow another ellipse. The Octahedron has edges forming 6 opposite edge pairs. So there are a total of 6 ellipses to define the complete Jitterbug motion. These 6 ellipses are show in Figure #0 and Figure #. Copyright Sept. 00 4


16 Figure #0 Six ellipses and Octahedron Figure # Six ellipses and the VE Copyright Sept. 00 5
17 It is well known, and as mentioned above, that the Jitterbug vertices pass through an Iahedron position during its Jitterbug motion. (See Figure #.) What is not well know is that the Jitterbug vertices also pass through a regular Dodecahedron position along the ellipses. (See Figure #.) Figure # Jitterbug in Iahedron position Figure # Jitterbug in regular Dodecahedron position Copyright Sept. 00 6
18 Unlike the Jitterbug in the Iahedron position, not all the vertices of the regular Dodecahedron are defined by one Jitterbug. The Dodecahedron has 0 vertices. The Jitterbug in the Dodecahedron position (as well as in the Iahedron position) has only vertices. To completely define all 0 vertices of the Dodecahedron in a symmetrical way requires 5 Jitterbugs. This gives a total of 5 60 vertices. When this is done, the pentagon faces of the Dodecahedron become pentagrams. (It is possible to cover all the Dodecahedron vertices with Jitterbugs but not in a symmetrical way. That is, not in a way as to have each of the Dodecahedron s vertices covered by the same number of Jitterbug vertices and each of the Dodecahedron s faces containing the same number of Jitterbug triangle edges.) Figure #4 Symmetrical covering of Dodecahedron by 5 Jitterbugs (These 5 Jitterbugs are the basis for the 0 Polyhedron as explained in the paper What s in this Polyhedron? which can be found at The Jitterbug in the VE position is shown in Figure #5. Copyright Sept. 00 7
19 Figure #5 Jitterbug in the VE position Because of the symmetry of the elliptical path about its semimajor axis, a Jitterbug vertex will pass through Iahedra and regular Dodecahedra positions. These are shown in Figure #6. The vertex positions labeled D,C,T stand for the Dodecahedron, Cube, Tetrahedron position. (It is well known that 5 Cubes and 0 Tetrahedra share the same vertices as a regular Dodecahedron.) The positions labeled O are the Octahedron positions, those labeled I are the Iahedron positions, and those labeled VE are the VE positions. Figure #6 Polyhedra positions of the Jitterbug motion Copyright Sept. 00 8
20 We can calculate the angular amount γ that the Jitterbug triangle rotates from the VE (γ0 ) position into the Iahedron position (γ I ). Starting with equation () () we write V EL (4) V EL Now, the distance from the center of volume to the face center of an Iahedron s triangle face is DVF I where + 5 τ τ EL Here, we have V DVF I for equation (4). I Since the size of the Iahedron triangles are the same as the size of the Jitterbug triangles, we have EL I EL Then equation (4) for the Iahedron position of the Jitterbug becomes ( γ ) I τ ( γ ) I Which gives γ I τ Copyright Sept. 00 9
21 This means that the Jitterbug triangle is rotated by the angular amount γ I τ arc from the VE position (clockwise or counter clockwise) to be in the Iahedron position. Note that the triangles of the Jitterbug are like gears in that if a triangle is rotated clockwise, then the triangles attached to it must rotate counterclockwise. The corresponding angle in the YZ-plane through which the ellipse radius r must sweep through to get to the Iahedron position can be obtained by using the equation (derived above) + + ( γ ) I τ 8 4 ( θ ) I τ τ τ 8 + τ 4 τ ( τ + ) ( θ ) I 4 τ τ + 4 τ ( θ ) I τ + 4 So, θ I τ arc τ + 4 which is the angle about the X-axis that the ellipse radius rotates to the Iahedron position. Copyright Sept. 00 0

22 To calculate the angular rotation of the Jitterbug triangles for the regular Dodecahedron position, we first find the radial position of one of the Jitterbug s triangles when in the Dodecahedron position. Figure #7 Three vertices of the Jitterbug and Dodecahedron Figure #7 shows of the Jitterbug s vertices coinciding with of the Dodecahedron s vertices. It can be shown that these three vertices can be given the (x, y, z) coordinates V (0, τ, τ ) V ( τ, 0, τ) V ( τ, τ, 0) + τ where 5. Using these coordinates sets the Octahedron s edge length. In this case, the edge length of the Octahedron, calculated using the equation τ n+ τ n + τ n- is EL O distance(v, V) sqrt(τ 6 + τ + (τ τ ) ) EL O τ Then, using τ τ + τ τ + + τ τ +, the center of the triangle face is at Copyright Sept. 00
23 FC ( (τ + /), (τ + /), (τ + /) ) which is a distance ( τ /) DVF DT + from the center of volume. Again, using equation (4) (4) V EL with V DVF DT and EL EL O, we get so that γ D ( γ ) D ( γ ) D ( ( τ + /) ) ( τ + /) τ ( τ ) ( τ /) + a τ This is the angular amount that the Jitterbug triangle is rotated about the V-axis from the VE position to the Dodecahedron position. To get the angular amount the ellipse radius is rotated about the X-axis to get to the Dodecahedron position along the ellipse, we again use the equation With + + we get 9τ + 6τ + 8 τ ( γ D ) 4 Copyright Sept. 00
24 ( θ ) D 9τ + 6τ τ 9τ + 6τ τ ( ) ( 9τ + 6τ + ) θ D 4 8 τ + 8τ + τ + ( θ ) D 5τ + 0 8τ + 5 D 6 ( θ ) So, the rotation about the X-axis which sweeps the ellipse radius to the Dodecahedron position is θ D 5 arc Copyright Sept. 00
25 Sub-Octahedron Zone As mentioned above, with physical, solid triangles, a Jitterbug s vertex does not follow the complete path of an ellipse. We now remove this constraint and let the vertices travel along the complete elliptical path. There are then two alternatives for Jitterbug triangle motion: ) When the Jitterbug triangle reaches the Octahedron position (from the VE position) they continue to rotate in the same direction, reverse their radial direction of motion, and change size as the vertices traverse the sub- Octahedron zone of one of the 6 ellipses, ) When the Jitterbug triangle reaches the Octahedron position (from the VE position) they continue to rotate in the same direction, continue to move in the same radial direction (toward the center of volume), and do not change size. Figure #8 The sub-octahedron Zone of ellipse We consider the first case here. In the next section we consider the second case. Beginning in the Octahedron position, the vertices are now to travel within the sub- Octahedron zone of the 6 ellipses of the Jitterbug. As shown in Figure #9, each of the Octahedron s vertices split into vertices and the diametrically opposite vertices, on the same ellipse, travel in the same direction. Copyright Sept. 00 4

26 Figure #9 Jitterbug through sub-octahedron zone Figure #8 Triangle vertices switch ellipses Copyright Sept. 00 5
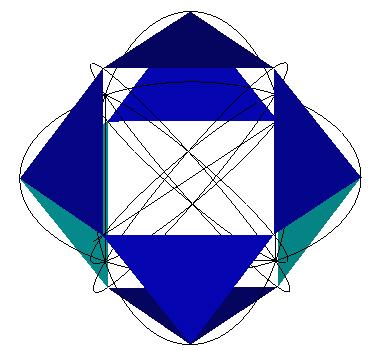
27 Note that the vertices of a triangle have switched ellipses. That is, in going from the original VE position to the original Octahedron position, a vertex of a triangle follows a particular ellipse. For the triangle to continue to rotate and to remain on some elliptical path, the vertex of the triangle switches to one of the other ellipses which pass through the same Octahedron vertex position. The vertex, having switched, can now travel along the sub-octahedron zone portion of an ellipse. Figure #0 shows one triangle of the Jitterbug s triangles with its vertices on ellipses,, and 6. Once the triangle is in the Octahedron position, the vertices switch to follow along ellipses 5,, 4, respectively. In order to accomplish this motion, the Jitterbug triangles move radially, rotate and change scale. This scale change is unlike the motion of the original Jitterbug motion describe previously. In one sub-octahedron zone position it is seen that the Jitterbug forms another, smaller VE. (See Figure #9.) Being another VE configuration, we can draw another pair of smaller ellipses within the original ellipses. This construction of another sub-ve within the original VE by following the ellipse paths can be continued to form sub-sub-ves, etc. and therefore sub-sub-jitterbugs. Figure # First sub-jitterbug ellipses Copyright Sept. 00 6
28 As Figure # shows, the Octahedron vertex at P is moved to position P along the sub- Octahedron zone of the original ellipse. Again, this is not part of the normal Jitterbug motion and is accomplished by a continuous change in scale of the triangles. From P, a sub-ve position, the vertex may either continue along the original ellipse or it may smoothly switch to the smaller embedded ellipse and move to P. P is a sub- Octahedron vertex position. The motion from P to P is a normal Jitterbug motion, i.e. without scaling. As before, we can map out the various polyhedra positions of the Jitterbug motion as its vertices traverse the sub-octahedron zone. This is shown in Figure # and Figure #. Figure # One Dodecahedron, Iahedron and VE position within sub-octahedron Zone of ellipse Figure # Dodecahedron, Iahedron and VE positions Copyright Sept. 00 7
29 From the original, large VE, (maximum radial distance from the center of volume) a triangle will move radially inward and rotate to the original, large Octahedron position. To then move to the sub-ve position, the triangle must reverse its radial direction (it moves radially outward) rotate (in either the same direction or opposite direction) and change scale (shrink in size.) The path that a vertex will follow in the sub-octahedron zone of the YZ-plane is just the edge of the original ellipse rotated 90 degrees. See, for example Figures #9 and # which show the ellipses in the same YZ-plane, one rotated 90 degrees to the other. The equation for the rotated ellipse in the YZ-plane is Z EL From which we get Now, as well as Y + EL Y EL Z r Y + Z r (θ) Z r Z / (θ) Combining these equations gives Z EL Z Z ( + (θ)) EL (θ) Z EL + To write this in terms of the angular rotation of the Jitterbug triangle γ, we again use + Copyright Sept. 00 8
30 Z EL ( ( )) ( ) ( ) γ + γ + + γ + EL + 6 Z Z + 8 EL As before, the radial position of the Jitterbug triangle (which moves radially along the V- axis) is given by V Z sin(β) And since ( β) sin we have V + 8 EL where the angular range is now 60 γ 60 about the V-axis. When the triangle is rotating from the original Octahedron position to the sub-ve position, the scale of the triangle is decreased. When the triangle further rotates from the sub-ve position to the second Octahedron position, the scale of the triangle increases back to its original size. We now determine an equation for these scale changes. The Scale Factor by which the original sized Jitterbug is reduced is given by the equation Copyright Sept. 00 9
31 ( ) DFV γ SF DFV O where DFV(γ) is the Distance from the triangle s Face center to its Vertex, which is now changing as a function of the angular amount the triangle is rotating γ. DFV O is the original Octahedron s Distance from the triangle s Face center to its Vertex. Since DFV O EL / sqrt(), we have We have Now, SF ( ) DFV γ EL DFV(γ) W + Y W Z (β) and (β) / sqrt(), so + 8 EL W Using Y EL Z from above, we get or EL 9 EL DFV + EL EL DFV + 8 ( ) DFV γ EL + 8 The Scale Factor equation then becomes SF + 8 At γ 0, which is the sub-ve position, the Jitterbug is reduced by a factor of SF VE Copyright Sept. 00 0
32 An alternative calculation for the sub-ve position can be calculated by noting that position P is at the semiminor axis position of the larger ellipse and is the semimajor axis position of the smaller ellipse. Therefore, the Jitterbug in the sub-ve position is reduced by the scale factor (SF) SF VE small ellipse semimajor axis / large semimajor axis large ellipse semiminor axis / large semimajor axis EL EL SF VE The Scale Factor for the Dodecahedron position of the Jitterbug is now calculated. Recall that the angle of rotation of the Jitterbug triangle for the Dodecahedron position is so γ D ( τ /) + a τ ( γ ) D ( τ + /) τ τ + τ and Then 5 τ τ ( γ D ) 4 SF D 5 τ τ It can be shown that τ 4 τ +, so we get Copyright Sept. 00
33 SF D + 5 τ + τ + SF D Now for the Iahedron s scale factor. We know that the rotation angle for the Iahedron position is so that γ I τ arc Then ( γ ) I ( γ ) I τ τ 8 4 SF I 4 τ SF I + τ + SF I τ + And with τ τ +, we get SF I / τ Copyright Sept. 00
34 Alternative Sub-Octahedron Zone Motion There is another way for the vertices of the original sized Jitterbug to traverse the sub- Octahedron zone portion of the ellipse. With this alternative method the triangles do not change scale and they continue to move radially inward. This can be accomplished by allowing the triangles to interpenetrate one another. See Figure #4. Note that the triangles vertices are still paired. That is, the triangles are still joined together. As Figure #4 shows, the same sequence of polyhedra (Dodecahedron, Iahedron, VE) occur as in the previous case. When the vertices are in the VE position, the 8 Jitterbug triangles all have their face centers at the coordinate origin (0, 0, 0). For the vertices of the Jitterbug to traverse the sub-octahedron zone (starting from the closed Octahedron position), the triangles rotate an additional 0 degrees (about the V- axis) to the sub-ve position and another 0 degrees from the sub-ve to the second original Octahedron position. From the Octahedron to sub-ve position, the triangles move radially inward a distance of DVF O EL 6 which places all 8 triangles of the Jitterbug at the coordinate origin (0,0,0). From the sub-ve position to the second original Octahedron position, the triangles have passed through the coordinate origin and have moved outward a distance of DVF O. Note that these rotations are half that of the original Jitterbug motion (the non-sub- Octahedron zone motions) but that the total radial displacement from the original Octahedron to sub-ve position is the same as the total radial displacement from the original Octahedron to the original VE position. Copyright Sept. 00
35 Figure #4 Triangles are allowed to interpenetrate Copyright Sept. 00 4

36 We now develop equations for the vertex motion along the sub-octahedron zone. Figure 5 Orientation of ellipse and axes We have already developed the equation for the distance along the V-axis to the location of the Jitterbug triangles. () V EL where, for this case the angular range is 60 γ 0 with the Octahedron position occurring at γ 60, the sub-ve position occurring at γ 90 and the second Octahedron position occurring at γ 0. (If the triangle were rotating in the opposite direction then the angular range would be 60 γ 0.) Now, the angular positions of the Dodecahedron and the Iahedron for the sub- Octahedron zone can be calculated as follows. Consider the Dodecahedron in Figure #6. We see that the rotation angle θ DSO in the YZplane of the ellipse radius to the Dodecahedron position in the sub-octahedron zone is θ DSO 90 θ D Copyright Sept. 00 5
37 Figure #6 Angle for sub-octahedron zone Dodecahedron position From the original Jitterbug motion calculations, we know that so θ D 5 arc ( θ ) D 5 6 and ( θ ) sin D 6 which means (θ DSO ) (90 θ D ) (90 )(θ D ) + sin(90 )sin(θ D ) (θ DSO ) sin(θ D ) Therefore ( θ ) DSO θ DSO 6 arc Then, using the equation derived previously, Copyright Sept. 00 6
38 we get ( γ ) DSO (γ DSO ) /4 which means that γ DSO arc(/4) This is the angular amount the triangle is rotated about the V-axis to be positioned into the first sub-dodecahedron position along the sub-octahedron zone of the ellipse. For the Iahedron position, we know that θ I τ arc τ + 4 ( θ ) I τ τ + 4 which means that sin ( θ ) I τ + τ + 4 Then with we have (θ ISO ) (90 θ I ) sin(θ I ) ( θ ) ISO τ + τ + 4 Using θ ISO τ + arc τ + 4 Copyright Sept. 00 7
39 we get ( γ ) ISO τ + τ + 4 τ + τ + 4 ( γ ) ISO ( γ ) ISO τ + τ + ( τ + 4) ( τ + ) 6τ + + τ 4 τ + 8τ + 8 γ ISO τ + arc τ + This is the angular amount that the Jitterbug triangle is rotated about the V-axis to position the triangle s vertex at the first Iahedron position along the sub-octahedron zone of the ellipse. As with the previous case for the vertices traversing the sub-octahedron zone of the ellipse, the Jitterbug (and polyhedra) is scaled. The scale factors are the same as previously calculated for the previous case. However, in this case in which the triangles interpenetrate each other as the vertices traverse this portion of the ellipse, the scale of the triangles do not change. Copyright Sept. 00 8
 FCC lattice and the purple is the odd (Octahedron centered) FCC lattice.")
40 Additional Comments The Jitterbug ellipse is such that it passes through 6 vertices of the combined odd-even FCC lattices. Figure 7 Ellipse in odd-even FCC combined lattice In Figure #7, the red is the even (vertex centered) FCC lattice and the purple is the odd (Octahedron centered) FCC lattice. Two Jitterbugs can not share the same triangular face and have their positions (location of center of volume) fixed as they go through the Jitterbug motion. If two Jitterbugs are to share the same triangle face then as the joined Jitterbugs jitterbug, the positions of the Jitterbugs must move. As Fuller points out, when in the Octahedron position, it is possible to twist the Jitterbug to make it collapse and lay flat. It can then be folded into a Tetrahedron. There are many Jitterbugs, of various sizes, in the 0 Polyhedron. The planes of the initial 5 Jitterbugs of the 0 Polyhedron align with the planes of the great circles of polyhedra rotational symmetries which define the 0 spherical triangles on a sphere. Copyright Sept. 00 9


41 Figure 8 Five Jitterbugs ellipse sets in the planes of 5 Great Circles to define a 0 Polyhedron like structure One way to look at an ellipses on the surface of the surrounding cylinder is to recognize that the equation V EL is simply a ine wave wrapped around the cylinder. There are such ine waves wrapped onto the surface of a Jitterbug cylinder corresponding to the vertices of a Jitterbug triangle. Figure #9 Three Jitterbug ellipses on a cylinder Copyright Sept
42 Summary The vertices of the Jitterbug triangles move on elliptical paths. There are 6 ellipses per Jitterbug. These 6 ellipses define planes, ellipses per plane. The planes intersect each other at 90 degrees. The ellipses per plane intersect each other at 90 degrees. For the normal Jitterbug motion, based on physical, rigid mechanical models, the vertices of the Jitterbug do not travel along the complete elliptical path. The equation for the Jitterbug ellipse is Y EL Z + EL The parametric form of the equation for the ellipse is given by Z Y EL EL sin with 0 θ 60 is the angle of rotation of the ellipse radius about the X-axis. The semimajor axis is (EL the edge length of the Jitterbug) a EL The semiminor axes is b EL. The eccentricity of the ellipse is e The coordinates for the focus points in the (Y, Z) plane are Copyright Sept. 00 4
43 and 0, ( 0.0, EL) 0, ( 0.0, EL) The equations used to convert a rotation of the ellipse radius by the angle θ amount about the X-axis to the corresponding rotation of the triangle by the angle γ amount about the V-axis and visa versa are + For the normal Jitterbug motion, 60 γ 60 with γ 60 being the first Octahedron position, γ 0 being the VE position, and γ 60 being the second Octahedron position. The corresponding YZ-plane rotation angles of the ellipse radius is 45 θ 45. The radial position of the Jitterbug triangle with respect to its rotation about the V-axis is given by V EL As the Jitterbug moves from the VE position to the Octahedron position, the vertices pass through first an Iahedron position and then a regular Dodecahedron position. The angular amount that a Jitterbug triangle is rotated (in either direction) from the VE position to the Iahedron position: γ I τ arc Copyright Sept. 00 4
44 θ I τ arc τ + 4 The angular amount that the Jitterbug triangle is rotated (in either direction) from the VE position to the Dodecahedron position: γ D ( τ /) + a τ θ D 5 arc By removing the constraint of fixed sized, impenetrable triangles, the vertices of the Jitterbug can be made to travel along the sub-octahedron Zone portion of the ellipse. There are then different ways that the vertices can traverse this part of the ellipse ) By allowing the scale of the Jitterbug triangles to change, but still not allowing the triangles to interpenetrate each other, ) By allowing the Jitterbug triangles to interpenetrate each other without changing the size (scale) of the triangles. CASE : For this case, the radial distance of the triangles is given by the equation V + 8 with 60 γ 60. EL The Jitterbug triangles are scaled by the Scale Factor SF + 8 For the VE position (γ 0 ) SF VE For the Dodecahedron position (γ γ D above) Copyright Sept. 00 4
45 SF D For the Iahedron position (γ γ I above) SF I / τ CASE : For this case, the Jitterbug triangles interpenetrate but do not change scale. However, the corresponding polyhedra do change scale as in case above. The radial position of the triangles is given by V EL where 60 γ 0 with the Octahedron position occurring at γ 60, the sub- VE position occurring at γ 90 and the second Octahedron position occurring at γ 0. (If the triangle were rotating in the opposite direction then the angular range would be 60 γ 0.) The Iahedron position is at γ ISO θ ISO τ + arc τ + τ + arc τ + 4 The sub-dodecahedron position is at γ DSO arc(/4) θ DSO arc The sub-ve position occurs at the angle γ VESO 90 θ VESO 90 Copyright Sept
46 References Fuller, R. Buckminster, Synergetics, MacMillan Publishing Company, 98 The folowing references were not used for writing of this paper. They were discovered only after I had done my own calculations and illustrations for this paper. Angell, I. O. and Moore, M. "Symmetrical Intersections of Cylinders." Acta Cryst. Sect. A 4, 44-50, 987. Moore, M. "Symmetrical Intersections of Right Circular Cylinders." Math. Gaz. 58, 8-85, 974. Copyright Sept
Jitterbug Defined Polyhedra: The Shape and Dynamics of Space
 Jitterbug Defined Polyhedra: The Shape and Dynamics of Space by Robert W. Gray rwgray@rwgrayprojects.com Oct. 25-26, 2001 This presentation may be found at: http://www.rwgrayprojects.com/oswegooct2001/presentation/prsentationweb.html
Jitterbug Defined Polyhedra: The Shape and Dynamics of Space by Robert W. Gray rwgray@rwgrayprojects.com Oct. 25-26, 2001 This presentation may be found at: http://www.rwgrayprojects.com/oswegooct2001/presentation/prsentationweb.html
What s In This Polyhedron?
 What's In This Polyhedron? by 180-4 Poplar St. Rochester, NY 14620 Copyright, October 2000 1 1. Introduction In June of 1998 Lynnclaire Dennis and members of the Sequoia Symposium showed me a 120 triangular
What's In This Polyhedron? by 180-4 Poplar St. Rochester, NY 14620 Copyright, October 2000 1 1. Introduction In June of 1998 Lynnclaire Dennis and members of the Sequoia Symposium showed me a 120 triangular
Math 462: Review questions
 Math 462: Review questions Paul Hacking 4/22/10 (1) What is the angle between two interior diagonals of a cube joining opposite vertices? [Hint: It is probably quickest to use a description of the cube
Math 462: Review questions Paul Hacking 4/22/10 (1) What is the angle between two interior diagonals of a cube joining opposite vertices? [Hint: It is probably quickest to use a description of the cube
SHAPE AND STRUCTURE. Shape and Structure. An explanation of Mathematical terminology
 Shape and Structure An explanation of Mathematical terminology 2005 1 POINT A dot Dots join to make lines LINE A line is 1 dimensional (length) A line is a series of points touching each other and extending
Shape and Structure An explanation of Mathematical terminology 2005 1 POINT A dot Dots join to make lines LINE A line is 1 dimensional (length) A line is a series of points touching each other and extending
Chapter 11. Parametric Equations And Polar Coordinates
 Instructor: Prof. Dr. Ayman H. Sakka Chapter 11 Parametric Equations And Polar Coordinates In this chapter we study new ways to define curves in the plane, give geometric definitions of parabolas, ellipses,
Instructor: Prof. Dr. Ayman H. Sakka Chapter 11 Parametric Equations And Polar Coordinates In this chapter we study new ways to define curves in the plane, give geometric definitions of parabolas, ellipses,
We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance.
 Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Solid geometry We have set up our axioms to deal with the geometry of space but have not yet developed these ideas much. Let s redress that imbalance. First, note that everything we have proven for the
Answer Key: Three-Dimensional Cross Sections
 Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
Geometry A Unit Answer Key: Three-Dimensional Cross Sections Name Date Objectives In this lesson, you will: visualize three-dimensional objects from different perspectives be able to create a projection
11.4 Three-Dimensional Figures
 11. Three-Dimensional Figures Essential Question What is the relationship between the numbers of vertices V, edges E, and faces F of a polyhedron? A polyhedron is a solid that is bounded by polygons, called
11. Three-Dimensional Figures Essential Question What is the relationship between the numbers of vertices V, edges E, and faces F of a polyhedron? A polyhedron is a solid that is bounded by polygons, called
Example: The following is an example of a polyhedron. Fill the blanks with the appropriate answer. Vertices:
 11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
11.1: Space Figures and Cross Sections Polyhedron: solid that is bounded by polygons Faces: polygons that enclose a polyhedron Edge: line segment that faces meet and form Vertex: point or corner where
To graph the point (r, θ), simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6
, simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6") Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Rhombic Triacontahedron
 Rhombic Triacontahedron Figure Rhombic Triacontahedron. Vertex labels as used for the corresponding vertices of the 0 Polyhedron. Page of Figure Icosahedron (red) and Dodecahedron (yellow) define the rhombic
Rhombic Triacontahedron Figure Rhombic Triacontahedron. Vertex labels as used for the corresponding vertices of the 0 Polyhedron. Page of Figure Icosahedron (red) and Dodecahedron (yellow) define the rhombic
12 m. 30 m. The Volume of a sphere is 36 cubic units. Find the length of the radius.
 NAME DATE PER. REVIEW #18: SPHERES, COMPOSITE FIGURES, & CHANGING DIMENSIONS PART 1: SURFACE AREA & VOLUME OF SPHERES Find the measure(s) indicated. Answers to even numbered problems should be rounded
NAME DATE PER. REVIEW #18: SPHERES, COMPOSITE FIGURES, & CHANGING DIMENSIONS PART 1: SURFACE AREA & VOLUME OF SPHERES Find the measure(s) indicated. Answers to even numbered problems should be rounded
Geometry Vocabulary. acute angle-an angle measuring less than 90 degrees
 Geometry Vocabulary acute angle-an angle measuring less than 90 degrees angle-the turn or bend between two intersecting lines, line segments, rays, or planes angle bisector-an angle bisector is a ray that
Geometry Vocabulary acute angle-an angle measuring less than 90 degrees angle-the turn or bend between two intersecting lines, line segments, rays, or planes angle bisector-an angle bisector is a ray that
Today we will be exploring three-dimensional objects, those that possess length, width, and depth.
 Lesson 22 Lesson 22, page 1 of 13 Glencoe Geometry Chapter 11.1 3-D figures & Polyhedra Today we will be exploring three-dimensional objects, those that possess length, width, and depth. In Euclidean,
Lesson 22 Lesson 22, page 1 of 13 Glencoe Geometry Chapter 11.1 3-D figures & Polyhedra Today we will be exploring three-dimensional objects, those that possess length, width, and depth. In Euclidean,
Proof of Constant Width of Spheroform with Tetrahedral Symmetry
 Proof of Constant Width of Spheroform with Tetrahedral Symmetry Patrick Roberts Corvallis, Oregon August 20, 2012 The four faces of the Reuleaux tetrahedron are sections of sphere surface, each centered
Proof of Constant Width of Spheroform with Tetrahedral Symmetry Patrick Roberts Corvallis, Oregon August 20, 2012 The four faces of the Reuleaux tetrahedron are sections of sphere surface, each centered
Platonic Polyhedra and How to Construct Them
 Platonic Polyhedra and How to Construct Them Tarun Biswas June 17, 2016 The platonic polyhedra (or platonic solids) are convex regular polyhedra that have identical regular polygons as faces They are characterized
Platonic Polyhedra and How to Construct Them Tarun Biswas June 17, 2016 The platonic polyhedra (or platonic solids) are convex regular polyhedra that have identical regular polygons as faces They are characterized
MATHEMATICS. Y4 Understanding shape Visualise, describe and classify 3-D and 2-D shapes. Equipment
 MATHEMATICS Y4 Understanding shape 4501 Visualise, describe and classify 3-D and 2-D shapes Paper, pencil, ruler Equipment Maths Go Go Go 4501 Visualise, describe and classify 3-D and 2-D shapes. Page
MATHEMATICS Y4 Understanding shape 4501 Visualise, describe and classify 3-D and 2-D shapes Paper, pencil, ruler Equipment Maths Go Go Go 4501 Visualise, describe and classify 3-D and 2-D shapes. Page
Polygons and Convexity
 Geometry Week 4 Sec 2.5 to ch. 2 test Polygons and Convexity section 2.5 convex set has the property that any two of its points determine a segment contained in the set concave set a set that is not convex
Geometry Week 4 Sec 2.5 to ch. 2 test Polygons and Convexity section 2.5 convex set has the property that any two of its points determine a segment contained in the set concave set a set that is not convex
Glossary of dictionary terms in the AP geometry units
 Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Glossary of dictionary terms in the AP geometry units affine linear equation: an equation in which both sides are sums of terms that are either a number times y or a number times x or just a number [SlL2-D5]
Computer Graphics using OpenGL, 3 rd Edition F. S. Hill, Jr. and S. Kelley
 Computer Graphics using OpenGL, 3 rd Edition F. S. Hill, Jr. and S. Kelley Chapter 6.1-3 Modeling Shapes with Polygonal Meshes S. M. Lea University of North Carolina at Greensboro 2007, Prentice Hall 3D
Computer Graphics using OpenGL, 3 rd Edition F. S. Hill, Jr. and S. Kelley Chapter 6.1-3 Modeling Shapes with Polygonal Meshes S. M. Lea University of North Carolina at Greensboro 2007, Prentice Hall 3D
acute angle An angle with a measure less than that of a right angle. Houghton Mifflin Co. 2 Grade 5 Unit 6
 acute angle An angle with a measure less than that of a right angle. Houghton Mifflin Co. 2 Grade 5 Unit 6 angle An angle is formed by two rays with a common end point. Houghton Mifflin Co. 3 Grade 5 Unit
acute angle An angle with a measure less than that of a right angle. Houghton Mifflin Co. 2 Grade 5 Unit 6 angle An angle is formed by two rays with a common end point. Houghton Mifflin Co. 3 Grade 5 Unit
UNIVERSITI TEKNOLOGI MALAYSIA SSE 1893 ENGINEERING MATHEMATICS TUTORIAL 5
 UNIVERSITI TEKNOLOGI MALAYSIA SSE 189 ENGINEERING MATHEMATIS TUTORIAL 5 1. Evaluate the following surface integrals (i) (x + y) ds, : part of the surface 2x+y+z = 6 in the first octant. (ii) (iii) (iv)
UNIVERSITI TEKNOLOGI MALAYSIA SSE 189 ENGINEERING MATHEMATIS TUTORIAL 5 1. Evaluate the following surface integrals (i) (x + y) ds, : part of the surface 2x+y+z = 6 in the first octant. (ii) (iii) (iv)
Geometry: Semester 2 Practice Final Unofficial Worked Out Solutions by Earl Whitney
 Geometry: Semester 2 Practice Final Unofficial Worked Out Solutions by Earl Whitney 1. Wrapping a string around a trash can measures the circumference of the trash can. Assuming the trash can is circular,
Geometry: Semester 2 Practice Final Unofficial Worked Out Solutions by Earl Whitney 1. Wrapping a string around a trash can measures the circumference of the trash can. Assuming the trash can is circular,
To graph the point (r, θ), simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6. ) is graphed below:
, simply go out r units along the initial ray, then rotate through the angle θ. The point (1, 5π 6. ) is graphed below:") Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Polar Coordinates Any point in the plane can be described by the Cartesian coordinates (x, y), where x and y are measured along the corresponding axes. However, this is not the only way to represent points
Junior Math Circles March 3, D Geometry I
 1 University of Waterloo Faculty of Mathematics Centre for Education in Mathematics and Computing Junior Math Circles March 3, 2010 3D Geometry I Opening Problem Max received a gumball machine for his
1 University of Waterloo Faculty of Mathematics Centre for Education in Mathematics and Computing Junior Math Circles March 3, 2010 3D Geometry I Opening Problem Max received a gumball machine for his
The radius for a regular polygon is the same as the radius of the circumscribed circle.
 Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
Perimeter and Area The perimeter and area of geometric shapes are basic properties that we need to know. The more complex a shape is, the more complex the process can be in finding its perimeter and area.
The Three Dimensional Coordinate System
 The Three-Dimensional Coordinate System The Three Dimensional Coordinate System You can construct a three-dimensional coordinate system by passing a z-axis perpendicular to both the x- and y-axes at the
The Three-Dimensional Coordinate System The Three Dimensional Coordinate System You can construct a three-dimensional coordinate system by passing a z-axis perpendicular to both the x- and y-axes at the
Math 265 Exam 3 Solutions
 C Roettger, Fall 16 Math 265 Exam 3 Solutions Problem 1 Let D be the region inside the circle r 5 sin θ but outside the cardioid r 2 + sin θ. Find the area of D. Note that r and θ denote polar coordinates.
C Roettger, Fall 16 Math 265 Exam 3 Solutions Problem 1 Let D be the region inside the circle r 5 sin θ but outside the cardioid r 2 + sin θ. Find the area of D. Note that r and θ denote polar coordinates.
Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines, a line which passes through the point P
 Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines, a line which passes through the point P and parallel to l, can be drawn. A triangle can be
Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines, a line which passes through the point P and parallel to l, can be drawn. A triangle can be
INSTRUCTIONS FOR THE USE OF THE SUPER RULE TM
 INSTRUCTIONS FOR THE USE OF THE SUPER RULE TM NOTE: All images in this booklet are scale drawings only of template shapes and scales. Preparation: Your SUPER RULE TM is a valuable acquisition for classroom
INSTRUCTIONS FOR THE USE OF THE SUPER RULE TM NOTE: All images in this booklet are scale drawings only of template shapes and scales. Preparation: Your SUPER RULE TM is a valuable acquisition for classroom
Indiana State Math Contest Geometry
 Indiana State Math Contest 018 Geometry This test was prepared by faculty at Indiana University - Purdue University Columbus Do not open this test booklet until you have been advised to do so by the test
Indiana State Math Contest 018 Geometry This test was prepared by faculty at Indiana University - Purdue University Columbus Do not open this test booklet until you have been advised to do so by the test
Conics, Parametric Equations, and Polar Coordinates. Copyright Cengage Learning. All rights reserved.
 10 Conics, Parametric Equations, and Polar Coordinates Copyright Cengage Learning. All rights reserved. 10.5 Area and Arc Length in Polar Coordinates Copyright Cengage Learning. All rights reserved. Objectives
10 Conics, Parametric Equations, and Polar Coordinates Copyright Cengage Learning. All rights reserved. 10.5 Area and Arc Length in Polar Coordinates Copyright Cengage Learning. All rights reserved. Objectives
Key Concept Euler s Formula
 11-1 Space Figures and Cross Sections Objectives To recognize polyhedrons and their parts To visualize cross sections of space figures Common Core State Standards G-GMD.B.4 Identify the shapes of two-dimensional
11-1 Space Figures and Cross Sections Objectives To recognize polyhedrons and their parts To visualize cross sections of space figures Common Core State Standards G-GMD.B.4 Identify the shapes of two-dimensional
Geometry Practice. 1. Angles located next to one another sharing a common side are called angles.
 Geometry Practice Name 1. Angles located next to one another sharing a common side are called angles. 2. Planes that meet to form right angles are called planes. 3. Lines that cross are called lines. 4.
Geometry Practice Name 1. Angles located next to one another sharing a common side are called angles. 2. Planes that meet to form right angles are called planes. 3. Lines that cross are called lines. 4.
PRACTICAL GEOMETRY SYMMETRY AND VISUALISING SOLID SHAPES
 UNIT 12 PRACTICAL GEOMETRY SYMMETRY AND VISUALISING SOLID SHAPES (A) Main Concepts and Results Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines,
UNIT 12 PRACTICAL GEOMETRY SYMMETRY AND VISUALISING SOLID SHAPES (A) Main Concepts and Results Let a line l and a point P not lying on it be given. By using properties of a transversal and parallel lines,
MATH 234. Excercises on Integration in Several Variables. I. Double Integrals
 MATH 234 Excercises on Integration in everal Variables I. Double Integrals Problem 1. D = {(x, y) : y x 1, 0 y 1}. Compute D ex3 da. Problem 2. Find the volume of the solid bounded above by the plane 3x
MATH 234 Excercises on Integration in everal Variables I. Double Integrals Problem 1. D = {(x, y) : y x 1, 0 y 1}. Compute D ex3 da. Problem 2. Find the volume of the solid bounded above by the plane 3x
Section 10.1 Polar Coordinates
 Section 10.1 Polar Coordinates Up until now, we have always graphed using the rectangular coordinate system (also called the Cartesian coordinate system). In this section we will learn about another system,
Section 10.1 Polar Coordinates Up until now, we have always graphed using the rectangular coordinate system (also called the Cartesian coordinate system). In this section we will learn about another system,
5/27/12. Objectives. Plane Curves and Parametric Equations. Sketch the graph of a curve given by a set of parametric equations.
 Objectives Sketch the graph of a curve given by a set of parametric equations. Eliminate the parameter in a set of parametric equations. Find a set of parametric equations to represent a curve. Understand
Objectives Sketch the graph of a curve given by a set of parametric equations. Eliminate the parameter in a set of parametric equations. Find a set of parametric equations to represent a curve. Understand
3 Identify shapes as two-dimensional (lying in a plane, flat ) or three-dimensional ( solid ).
 or three-dimensional ( solid ).") Geometry Kindergarten Identify and describe shapes (squares, circles, triangles, rectangles, hexagons, cubes, cones, cylinders, and spheres). 1 Describe objects in the environment using names of shapes,
Geometry Kindergarten Identify and describe shapes (squares, circles, triangles, rectangles, hexagons, cubes, cones, cylinders, and spheres). 1 Describe objects in the environment using names of shapes,
Moore Catholic High School Math Department
 Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
Moore Catholic High School Math Department Geometry Vocabulary The following is a list of terms and properties which are necessary for success in a Geometry class. You will be tested on these terms during
7th Bay Area Mathematical Olympiad
 7th Bay Area Mathematical Olympiad February 22, 2005 Problems and Solutions 1 An integer is called formidable if it can be written as a sum of distinct powers of 4, and successful if it can be written
7th Bay Area Mathematical Olympiad February 22, 2005 Problems and Solutions 1 An integer is called formidable if it can be written as a sum of distinct powers of 4, and successful if it can be written
Int 2 Checklist (Unit 1) Int 2 Checklist (Unit 1) Percentages
 Int 2 Checklist (Unit 1) Percentages") Percentages Know that appreciation means an increase in value and depreciation means a decrease in value Calculate simple interest over 1 year Calculate simple interest over a certain number of months
Percentages Know that appreciation means an increase in value and depreciation means a decrease in value Calculate simple interest over 1 year Calculate simple interest over a certain number of months
Geometry 10 and 11 Notes
 Geometry 10 and 11 Notes Area and Volume Name Per Date 10.1 Area is the amount of space inside of a two dimensional object. When working with irregular shapes, we can find its area by breaking it up into
Geometry 10 and 11 Notes Area and Volume Name Per Date 10.1 Area is the amount of space inside of a two dimensional object. When working with irregular shapes, we can find its area by breaking it up into
Chapter 4: Trigonometry
 Chapter 4: Trigonometry Section 4-1: Radian and Degree Measure INTRODUCTION An angle is determined by rotating a ray about its endpoint. The starting position of the ray is the of the angle, and the position
Chapter 4: Trigonometry Section 4-1: Radian and Degree Measure INTRODUCTION An angle is determined by rotating a ray about its endpoint. The starting position of the ray is the of the angle, and the position
Measuring Lengths The First Fundamental Form
 Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
Differential Geometry Lia Vas Measuring Lengths The First Fundamental Form Patching up the Coordinate Patches. Recall that a proper coordinate patch of a surface is given by parametric equations x = (x(u,
K-12 Geometry Standards
 Geometry K.G Identify and describe shapes (squares, circles, triangles, rectangles, hexagons, cubes, cones, cylinders, and spheres). 1. Describe objects in the environment using names of shapes, and describe
Geometry K.G Identify and describe shapes (squares, circles, triangles, rectangles, hexagons, cubes, cones, cylinders, and spheres). 1. Describe objects in the environment using names of shapes, and describe
Recent 3D Printed Sculptures
 Recent 3D Printed Sculptures Henry Segerman November 13, 2011 1 Introduction I am a mathematician and a mathematical artist, currently a research fellow in the Department of Mathematics and Statistics
Recent 3D Printed Sculptures Henry Segerman November 13, 2011 1 Introduction I am a mathematician and a mathematical artist, currently a research fellow in the Department of Mathematics and Statistics
Suggested List of Mathematical Language. Geometry
 Suggested List of Mathematical Language Geometry Problem Solving A additive property of equality algorithm apply constraints construct discover explore generalization inductive reasoning parameters reason
Suggested List of Mathematical Language Geometry Problem Solving A additive property of equality algorithm apply constraints construct discover explore generalization inductive reasoning parameters reason
Notes on Spherical Geometry
 Notes on Spherical Geometry Abhijit Champanerkar College of Staten Island & The Graduate Center, CUNY Spring 2018 1. Vectors and planes in R 3 To review vector, dot and cross products, lines and planes
Notes on Spherical Geometry Abhijit Champanerkar College of Staten Island & The Graduate Center, CUNY Spring 2018 1. Vectors and planes in R 3 To review vector, dot and cross products, lines and planes
Researches on polyhedra, Part I A.-L. Cauchy
 Researches on polyhedra, Part I A.-L. Cauchy Translated into English by Guy Inchbald, 2006 from the original: A.-L. Cauchy, Recherches sur les polyèdres. Première partie, Journal de l École Polytechnique,
Researches on polyhedra, Part I A.-L. Cauchy Translated into English by Guy Inchbald, 2006 from the original: A.-L. Cauchy, Recherches sur les polyèdres. Première partie, Journal de l École Polytechnique,
PARAMETRIC EQUATIONS AND POLAR COORDINATES
 10 PARAMETRIC EQUATIONS AND POLAR COORDINATES PARAMETRIC EQUATIONS & POLAR COORDINATES A coordinate system represents a point in the plane by an ordered pair of numbers called coordinates. PARAMETRIC EQUATIONS
10 PARAMETRIC EQUATIONS AND POLAR COORDINATES PARAMETRIC EQUATIONS & POLAR COORDINATES A coordinate system represents a point in the plane by an ordered pair of numbers called coordinates. PARAMETRIC EQUATIONS
Class Generated Review Sheet for Math 213 Final
 Class Generated Review Sheet for Math 213 Final Key Ideas 9.1 A line segment consists of two point on a plane and all the points in between them. Complementary: The sum of the two angles is 90 degrees
Class Generated Review Sheet for Math 213 Final Key Ideas 9.1 A line segment consists of two point on a plane and all the points in between them. Complementary: The sum of the two angles is 90 degrees
Zipper Unfoldings of Polyhedral Complexes
 Zipper Unfoldings of Polyhedral Complexes Erik D. Demaine Martin L. Demaine Anna Lubiw Arlo Shallit Jonah L. Shallit Abstract We explore which polyhedra and polyhedral complexes can be formed by folding
Zipper Unfoldings of Polyhedral Complexes Erik D. Demaine Martin L. Demaine Anna Lubiw Arlo Shallit Jonah L. Shallit Abstract We explore which polyhedra and polyhedral complexes can be formed by folding
Conics, Parametric Equations, and Polar Coordinates. Copyright Cengage Learning. All rights reserved.
 10 Conics, Parametric Equations, and Polar Coordinates Copyright Cengage Learning. All rights reserved. 10.5 Area and Arc Length in Polar Coordinates Copyright Cengage Learning. All rights reserved. Objectives
10 Conics, Parametric Equations, and Polar Coordinates Copyright Cengage Learning. All rights reserved. 10.5 Area and Arc Length in Polar Coordinates Copyright Cengage Learning. All rights reserved. Objectives
The Humble Tetrahedron
 The Humble Tetrahedron C. Godsalve email:seagods@hotmail.com November 4, 010 In this article, it is assumed that the reader understands Cartesian coordinates, basic vectors, trigonometry, and a bit of
The Humble Tetrahedron C. Godsalve email:seagods@hotmail.com November 4, 010 In this article, it is assumed that the reader understands Cartesian coordinates, basic vectors, trigonometry, and a bit of
Some announcements. Game reflections deadline extended to Monday (4/4)
") Symmetry Some announcements Game reflections deadline extended to Monday (4/4) Some announcements Game reflections deadline extended to Monday (4/4) Next math talk on Wednesday (4/6) at 4pm. Speaker is
Symmetry Some announcements Game reflections deadline extended to Monday (4/4) Some announcements Game reflections deadline extended to Monday (4/4) Next math talk on Wednesday (4/6) at 4pm. Speaker is
Vectors and the Geometry of Space
 Vectors and the Geometry of Space In Figure 11.43, consider the line L through the point P(x 1, y 1, z 1 ) and parallel to the vector. The vector v is a direction vector for the line L, and a, b, and c
Vectors and the Geometry of Space In Figure 11.43, consider the line L through the point P(x 1, y 1, z 1 ) and parallel to the vector. The vector v is a direction vector for the line L, and a, b, and c
Regular Polygons. by construction and paper folding. Paul Yiu Department of Mathematics Florida Atlantic University.
 Regular Polygons by construction and paper folding Paul Yiu Department of Mathematics Florida tlantic University January 22, 2009 1 Regular polygons (a) Triangle (b) Square (c) Pentagon (d) Hexagon (e)
Regular Polygons by construction and paper folding Paul Yiu Department of Mathematics Florida tlantic University January 22, 2009 1 Regular polygons (a) Triangle (b) Square (c) Pentagon (d) Hexagon (e)
Number/Computation. addend Any number being added. digit Any one of the ten symbols: 0, 1, 2, 3, 4, 5, 6, 7, 8, or 9
 14 Number/Computation addend Any number being added algorithm A step-by-step method for computing array A picture that shows a number of items arranged in rows and columns to form a rectangle associative
14 Number/Computation addend Any number being added algorithm A step-by-step method for computing array A picture that shows a number of items arranged in rows and columns to form a rectangle associative
February 07, Dimensional Geometry Notebook.notebook. Glossary & Standards. Prisms and Cylinders. Return to Table of Contents
 Prisms and Cylinders Glossary & Standards Return to Table of Contents 1 Polyhedrons 3-Dimensional Solids A 3-D figure whose faces are all polygons Sort the figures into the appropriate side. 2. Sides are
Prisms and Cylinders Glossary & Standards Return to Table of Contents 1 Polyhedrons 3-Dimensional Solids A 3-D figure whose faces are all polygons Sort the figures into the appropriate side. 2. Sides are
Log1 Contest Round 2 Theta Circles, Parabolas and Polygons. 4 points each
 Name: Units do not have to be included. 016 017 Log1 Contest Round Theta Circles, Parabolas and Polygons 4 points each 1 Find the value of x given that 8 x 30 Find the area of a triangle given that it
Name: Units do not have to be included. 016 017 Log1 Contest Round Theta Circles, Parabolas and Polygons 4 points each 1 Find the value of x given that 8 x 30 Find the area of a triangle given that it
Calculus III. Math 233 Spring In-term exam April 11th. Suggested solutions
 Calculus III Math Spring 7 In-term exam April th. Suggested solutions This exam contains sixteen problems numbered through 6. Problems 5 are multiple choice problems, which each count 5% of your total
Calculus III Math Spring 7 In-term exam April th. Suggested solutions This exam contains sixteen problems numbered through 6. Problems 5 are multiple choice problems, which each count 5% of your total
Contents. MATH 32B-2 (18W) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Homework 1 - Solutions 3. 2 Homework 2 - Solutions 13
 (L) G. Liu / (TA) A. Zhou Calculus of Several Variables. 1 Homework 1 - Solutions 3. 2 Homework 2 - Solutions 13") MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Homework - Solutions 3 2 Homework 2 - Solutions 3 3 Homework 3 - Solutions 9 MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus
MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus of Several Variables Contents Homework - Solutions 3 2 Homework 2 - Solutions 3 3 Homework 3 - Solutions 9 MATH 32B-2 (8) (L) G. Liu / (TA) A. Zhou Calculus
Figure 1: Derivation of Bragg s Law
 What is Bragg s Law and why is it Important? Bragg s law refers to a simple equation derived by English physicists Sir W. H. Bragg and his son Sir W. L. Bragg in 1913. This equation explains why the faces
What is Bragg s Law and why is it Important? Bragg s law refers to a simple equation derived by English physicists Sir W. H. Bragg and his son Sir W. L. Bragg in 1913. This equation explains why the faces
Geometry Vocabulary Math Fundamentals Reference Sheet Page 1
 Math Fundamentals Reference Sheet Page 1 Acute Angle An angle whose measure is between 0 and 90 Acute Triangle A that has all acute Adjacent Alternate Interior Angle Two coplanar with a common vertex and
Math Fundamentals Reference Sheet Page 1 Acute Angle An angle whose measure is between 0 and 90 Acute Triangle A that has all acute Adjacent Alternate Interior Angle Two coplanar with a common vertex and
Math 136 Exam 1 Practice Problems
 Math Exam Practice Problems. Find the surface area of the surface of revolution generated by revolving the curve given by around the x-axis? To solve this we use the equation: In this case this translates
Math Exam Practice Problems. Find the surface area of the surface of revolution generated by revolving the curve given by around the x-axis? To solve this we use the equation: In this case this translates
CATIA V5 Parametric Surface Modeling
 CATIA V5 Parametric Surface Modeling Version 5 Release 16 A- 1 Toolbars in A B A. Wireframe: Create 3D curves / lines/ points/ plane B. Surfaces: Create surfaces C. Operations: Join surfaces, Split & Trim
CATIA V5 Parametric Surface Modeling Version 5 Release 16 A- 1 Toolbars in A B A. Wireframe: Create 3D curves / lines/ points/ plane B. Surfaces: Create surfaces C. Operations: Join surfaces, Split & Trim
Course Number: Course Title: Geometry
 Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
Course Number: 1206310 Course Title: Geometry RELATED GLOSSARY TERM DEFINITIONS (89) Altitude The perpendicular distance from the top of a geometric figure to its opposite side. Angle Two rays or two line
AQA GCSE Further Maths Topic Areas
 AQA GCSE Further Maths Topic Areas This document covers all the specific areas of the AQA GCSE Further Maths course, your job is to review all the topic areas, answering the questions if you feel you need
AQA GCSE Further Maths Topic Areas This document covers all the specific areas of the AQA GCSE Further Maths course, your job is to review all the topic areas, answering the questions if you feel you need
3D shapes introduction
 3D shapes introduction 2D shapes have 2 dimensions width and height. They re flat. height 3D shapes have 3 dimensions height, width and depth. Sometimes we call them solids. When we draw them, we often
3D shapes introduction 2D shapes have 2 dimensions width and height. They re flat. height 3D shapes have 3 dimensions height, width and depth. Sometimes we call them solids. When we draw them, we often
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions
 Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
Math 366 Lecture Notes Section 11.4 Geometry in Three Dimensions Simple Closed Surfaces A simple closed surface has exactly one interior, no holes, and is hollow. A sphere is the set of all points at a
S8.6 Volume. Section 1. Surface area of cuboids: Q1. Work out the surface area of each cuboid shown below:
 Things to Learn (Key words, Notation & Formulae) Complete from your notes Radius- Diameter- Surface Area- Volume- Capacity- Prism- Cross-section- Surface area of a prism- Surface area of a cylinder- Volume
Things to Learn (Key words, Notation & Formulae) Complete from your notes Radius- Diameter- Surface Area- Volume- Capacity- Prism- Cross-section- Surface area of a prism- Surface area of a cylinder- Volume
Multiply using the grid method.
 Multiply using the grid method. Learning Objective Read and plot coordinates in all quadrants DEFINITION Grid A pattern of horizontal and vertical lines, usually forming squares. DEFINITION Coordinate
Multiply using the grid method. Learning Objective Read and plot coordinates in all quadrants DEFINITION Grid A pattern of horizontal and vertical lines, usually forming squares. DEFINITION Coordinate
Map-colouring with Polydron
 Map-colouring with Polydron The 4 Colour Map Theorem says that you never need more than 4 colours to colour a map so that regions with the same colour don t touch. You have to count the region round the
Map-colouring with Polydron The 4 Colour Map Theorem says that you never need more than 4 colours to colour a map so that regions with the same colour don t touch. You have to count the region round the
Explore Solids
 1212.1 Explore Solids Surface Area and Volume of Solids 12.2 Surface Area of Prisms and Cylinders 12.3 Surface Area of Pyramids and Cones 12.4 Volume of Prisms and Cylinders 12.5 Volume of Pyramids and
1212.1 Explore Solids Surface Area and Volume of Solids 12.2 Surface Area of Prisms and Cylinders 12.3 Surface Area of Pyramids and Cones 12.4 Volume of Prisms and Cylinders 12.5 Volume of Pyramids and
Geometry. Cluster: Experiment with transformations in the plane. G.CO.1 G.CO.2. Common Core Institute
 Geometry Cluster: Experiment with transformations in the plane. G.CO.1: Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of
Geometry Cluster: Experiment with transformations in the plane. G.CO.1: Know precise definitions of angle, circle, perpendicular line, parallel line, and line segment, based on the undefined notions of
Spherical Geometry MATH430
 Spherical Geometry MATH430 Fall 014 In these notes we summarize some results about the geometry of the sphere that complement should the textbook. Most notions we had on the plane (points, lines, angles,
Spherical Geometry MATH430 Fall 014 In these notes we summarize some results about the geometry of the sphere that complement should the textbook. Most notions we had on the plane (points, lines, angles,
Appendix D Trigonometry
 Math 151 c Lynch 1 of 8 Appendix D Trigonometry Definition. Angles can be measure in either degree or radians with one complete revolution 360 or 2 rad. Then Example 1. rad = 180 (a) Convert 3 4 into degrees.
Math 151 c Lynch 1 of 8 Appendix D Trigonometry Definition. Angles can be measure in either degree or radians with one complete revolution 360 or 2 rad. Then Example 1. rad = 180 (a) Convert 3 4 into degrees.
CSC418 / CSCD18 / CSC2504
 5 5.1 Surface Representations As with 2D objects, we can represent 3D objects in parametric and implicit forms. (There are also explicit forms for 3D surfaces sometimes called height fields but we will
5 5.1 Surface Representations As with 2D objects, we can represent 3D objects in parametric and implicit forms. (There are also explicit forms for 3D surfaces sometimes called height fields but we will
Substituting a 2 b 2 for c 2 and using a little algebra, we can then derive the standard equation for an ellipse centred at the origin,
 Conics onic sections are the curves which result from the intersection of a plane with a cone. These curves were studied and revered by the ancient Greeks, and were written about extensively by both Euclid
Conics onic sections are the curves which result from the intersection of a plane with a cone. These curves were studied and revered by the ancient Greeks, and were written about extensively by both Euclid
If the center of the sphere is the origin the the equation is. x y z 2ux 2vy 2wz d 0 -(2)
") Sphere Definition: A sphere is the locus of a point which remains at a constant distance from a fixed point. The fixed point is called the centre and the constant distance is the radius of the sphere.
Sphere Definition: A sphere is the locus of a point which remains at a constant distance from a fixed point. The fixed point is called the centre and the constant distance is the radius of the sphere.
TRANSFORMATIONS. The original figure is called the pre-image; the new (copied) picture is called the image of the transformation.
 picture is called the image of the transformation.") Quiz Review Sheet A transformation is a correspondence that maps a point. TRANSFORMATIONS The original figure is called the pre-image; the new (copied) picture is called the image of the transformation.
Quiz Review Sheet A transformation is a correspondence that maps a point. TRANSFORMATIONS The original figure is called the pre-image; the new (copied) picture is called the image of the transformation.
AREAS AND VOLUMES. Learning Outcomes and Assessment Standards
 4 Lesson AREAS AND VOLUMES Learning Outcomes and Assessment Standards Learning Outcome : Shape, space and measurement Assessment Standard Surface area and volume of right pyramids and cones. Volumes of
4 Lesson AREAS AND VOLUMES Learning Outcomes and Assessment Standards Learning Outcome : Shape, space and measurement Assessment Standard Surface area and volume of right pyramids and cones. Volumes of
Chapter 10: Parametric And Polar Curves; Conic Sections
 206 Chapter 10: Parametric And Polar Curves; Conic Sections Summary: This chapter begins by introducing the idea of representing curves using parameters. These parametric equations of the curves can then
206 Chapter 10: Parametric And Polar Curves; Conic Sections Summary: This chapter begins by introducing the idea of representing curves using parameters. These parametric equations of the curves can then
Pre AP Geometry. Mathematics Standards of Learning Curriculum Framework 2009: Pre AP Geometry
 Pre AP Geometry Mathematics Standards of Learning Curriculum Framework 2009: Pre AP Geometry 1 The content of the mathematics standards is intended to support the following five goals for students: becoming
Pre AP Geometry Mathematics Standards of Learning Curriculum Framework 2009: Pre AP Geometry 1 The content of the mathematics standards is intended to support the following five goals for students: becoming
1 Appendix to notes 2, on Hyperbolic geometry:
 1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
1230, notes 3 1 Appendix to notes 2, on Hyperbolic geometry: The axioms of hyperbolic geometry are axioms 1-4 of Euclid, plus an alternative to axiom 5: Axiom 5-h: Given a line l and a point p not on l,
Math Section 4.2 Radians, Arc Length, and Area of a Sector
 Math 1330 - Section 4.2 Radians, Arc Length, and Area of a Sector The word trigonometry comes from two Greek roots, trigonon, meaning having three sides, and meter, meaning measure. We have already defined
Math 1330 - Section 4.2 Radians, Arc Length, and Area of a Sector The word trigonometry comes from two Greek roots, trigonon, meaning having three sides, and meter, meaning measure. We have already defined
CARDSTOCK MODELING Math Manipulative Kit. Student Activity Book
 CARDSTOCK MODELING Math Manipulative Kit Student Activity Book TABLE OF CONTENTS Activity Sheet for L.E. #1 - Getting Started...3-4 Activity Sheet for L.E. #2 - Squares and Cubes (Hexahedrons)...5-8 Activity
CARDSTOCK MODELING Math Manipulative Kit Student Activity Book TABLE OF CONTENTS Activity Sheet for L.E. #1 - Getting Started...3-4 Activity Sheet for L.E. #2 - Squares and Cubes (Hexahedrons)...5-8 Activity
Section T Similar and congruent shapes
 Section T Similar and congruent shapes Two shapes are similar if one is an enlargement of the other (even if it is in a different position and orientation). There is a constant scale factor of enlargement
Section T Similar and congruent shapes Two shapes are similar if one is an enlargement of the other (even if it is in a different position and orientation). There is a constant scale factor of enlargement
3 Dimensional Geometry Chapter Questions. 1. What are the differences between prisms and pyramids? Cylinders and cones?
 3 Dimensional Geometry Chapter Questions 1. What are the differences between prisms and pyramids? Cylinders and cones? 2. What is volume and how is it found? 3. How are the volumes of cylinders, cones
3 Dimensional Geometry Chapter Questions 1. What are the differences between prisms and pyramids? Cylinders and cones? 2. What is volume and how is it found? 3. How are the volumes of cylinders, cones
MATH DICTIONARY. Number Sense. Number Families. Operations. Counting (Natural) Numbers The numbers we say when we count. Example: {0, 1, 2, 3, 4 }
 Numbers The numbers we say when we count. Example: {0, 1, 2, 3, 4 }") Number Sense Number Families MATH DICTIONARY Counting (Natural) Numbers The numbers we say when we count Example: {1, 2, 3, 4 } Whole Numbers The counting numbers plus zero Example: {0, 1, 2, 3, 4 } Positive
Number Sense Number Families MATH DICTIONARY Counting (Natural) Numbers The numbers we say when we count Example: {1, 2, 3, 4 } Whole Numbers The counting numbers plus zero Example: {0, 1, 2, 3, 4 } Positive
Unit Circle. Project Response Sheet
 NAME: PROJECT ACTIVITY: Trigonometry TOPIC Unit Circle GOALS MATERIALS Explore Degree and Radian Measure Explore x- and y- coordinates on the Unit Circle Investigate Odd and Even functions Investigate
NAME: PROJECT ACTIVITY: Trigonometry TOPIC Unit Circle GOALS MATERIALS Explore Degree and Radian Measure Explore x- and y- coordinates on the Unit Circle Investigate Odd and Even functions Investigate
Math 231E, Lecture 34. Polar Coordinates and Polar Parametric Equations
 Math 231E, Lecture 34. Polar Coordinates and Polar Parametric Equations 1 Definition of polar coordinates Let us first recall the definition of Cartesian coordinates: to each point in the plane we can
Math 231E, Lecture 34. Polar Coordinates and Polar Parametric Equations 1 Definition of polar coordinates Let us first recall the definition of Cartesian coordinates: to each point in the plane we can
Geometry Workbook WALCH PUBLISHING
 Geometry Workbook WALCH PUBLISHING Table of Contents To the Student..............................vii Unit 1: Lines and Triangles Activity 1 Dimensions............................. 1 Activity 2 Parallel
Geometry Workbook WALCH PUBLISHING Table of Contents To the Student..............................vii Unit 1: Lines and Triangles Activity 1 Dimensions............................. 1 Activity 2 Parallel
State if each pair of triangles is similar. If so, state how you know they are similar (AA, SAS, SSS) and complete the similarity statement.
 and complete the similarity statement.") Geometry 1-2 est #7 Review Name Date Period State if each pair of triangles is similar. If so, state how you know they are similar (AA, SAS, SSS) and complete the similarity statement. 1) Q R 2) V F H
Geometry 1-2 est #7 Review Name Date Period State if each pair of triangles is similar. If so, state how you know they are similar (AA, SAS, SSS) and complete the similarity statement. 1) Q R 2) V F H
MATH 1020 WORKSHEET 10.1 Parametric Equations
 MATH WORKSHEET. Parametric Equations If f and g are continuous functions on an interval I, then the equations x ft) and y gt) are called parametric equations. The parametric equations along with the graph
MATH WORKSHEET. Parametric Equations If f and g are continuous functions on an interval I, then the equations x ft) and y gt) are called parametric equations. The parametric equations along with the graph
Lesson Polygons
 Lesson 4.1 - Polygons Obj.: classify polygons by their sides. classify quadrilaterals by their attributes. find the sum of the angle measures in a polygon. Decagon - A polygon with ten sides. Dodecagon
Lesson 4.1 - Polygons Obj.: classify polygons by their sides. classify quadrilaterals by their attributes. find the sum of the angle measures in a polygon. Decagon - A polygon with ten sides. Dodecagon
Geometry Vocabulary. Name Class
 Geometry Vocabulary Name Class Definition/Description Symbol/Sketch 1 point An exact location in space. In two dimensions, an ordered pair specifies a point in a coordinate plane: (x,y) 2 line 3a line
Geometry Vocabulary Name Class Definition/Description Symbol/Sketch 1 point An exact location in space. In two dimensions, an ordered pair specifies a point in a coordinate plane: (x,y) 2 line 3a line
Stereographic Projections
 C6H3 PART IIA and PART IIB C6H3 MATERIALS SCIENCE AND METALLURGY Course C6: Crystallography Stereographic Projections Representation of directions and plane orientations In studying crystallographic and
C6H3 PART IIA and PART IIB C6H3 MATERIALS SCIENCE AND METALLURGY Course C6: Crystallography Stereographic Projections Representation of directions and plane orientations In studying crystallographic and
7) Are HD and HA the same line?
 Are HD and HA the same line?") Review for Exam 2 Math 123 SHORT ANSWER. You must show all work to receive full credit. Refer to the figure to classify the statement as true or false. 7) Are HD and HA the same line? Yes 8) What is the
Review for Exam 2 Math 123 SHORT ANSWER. You must show all work to receive full credit. Refer to the figure to classify the statement as true or false. 7) Are HD and HA the same line? Yes 8) What is the