Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application
|
|
|
- Antonia Berniece Ramsey
- 5 years ago
- Views:
Transcription
1 Dot-to-dot recent progress in UAS LiDAR: calibration, accuracy assessment, and application Arko Lucieer, Colin McCoull, Richard Ballard, Steve Harwin, Deepak Gautam, Darren Turner Surveying and Spatial Sciences Group School of Land & Food
2 Outline Development of commercial laser scanners for UAS TerraLuma UAS LiDAR brief history Design of latest TerraLuma UAS LiDAR Lever arm offset measurements Boresight calibration Accuracy assessment Application in pinus radiata plantation



3 Laser scanning

4 Source:







5 Commercial developments





6

7 Wallace, L., Lucieer, A., Watson, C., & Turner, D. (2012). Development of a UAV-LiDAR System with Application to Forest Inventory. Remote Sensing (UAV special issue), 4(6), doi: /rs


8 Detection of pruning Wallace, L., Lucieer, A., and Watson, C. (2014). Detecting pruning of individual stems using Airborne Laser Scanning data captured from an Unmanned Aerial Vehicle. International Journal of Applied Earth Observation and Geoinformation, 30 (1), 76-85, doi: /j.jag
.")

9 UAS SfM vs LiDAR Wallace, L., Lucieer, A., Malenovský, Z., Turner, D., Vopěnka, P. (2016). Assessment of forest structure using two UAV techniques: a comparison of airborne laser scanning and structure from motion (SfM) point clouds. Forests, 7(62), doi: /f
10 Geometric distortions 1 error in pitch, roll, or yaw can introduce a spatial error of 34 cm for a flying height of 20 m, and 1.75 m at 100 m flying height. Combined effect is worse. Small low-cost IMUs 1 accuracy best-case pitch/roll, much worse in heading




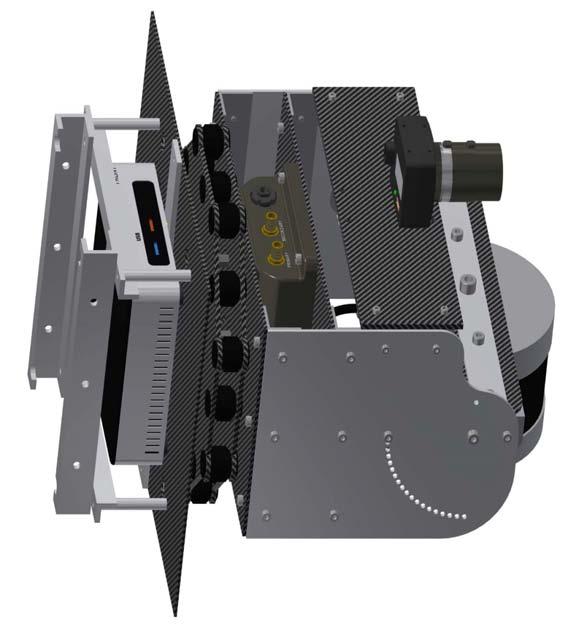
11 Dual antenna, dual frequency GNSS: 2 4 cm position, 0.15 heading Devourer X8 heavy-lift multi-rotor Brushless gimbal for sensor stabilisation Intel NUC data logger Velodyne VLP-16 Puck Machine vision camera Spatial Dual GNSS/IMU Electronics: voltage regulation and synchronisation
12 Video
13
14

15

16 Lever arm offsets

17 Lever arm offsets CAD

18

19

20


21

22

23 Calibration timing offset!
24 Boresight calibration


25 Boresight angles α

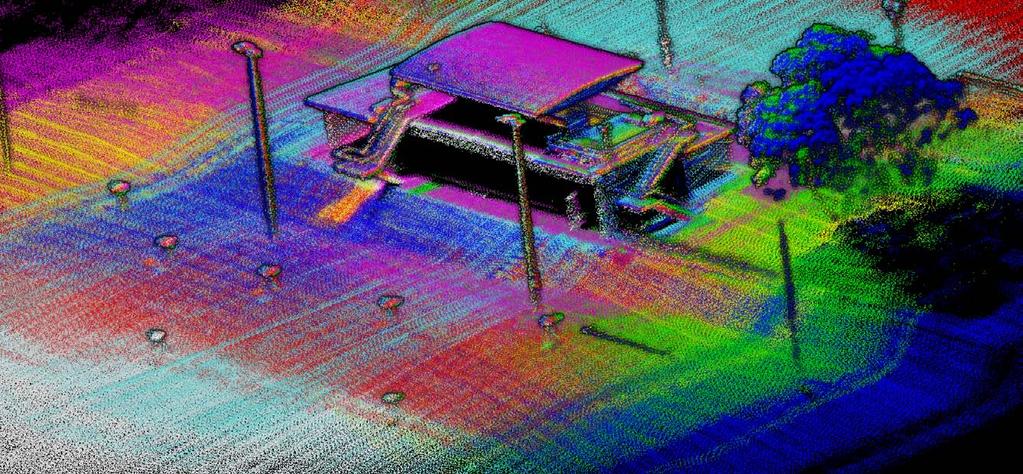
26 Before boresight calibration: ghosting

27 Before boresight calibration

28 After boresight calibration
29 After boresight calibration
30
31 Point density Scan Line number of returns number of last returns covered area in square meters per length (in km) point density: all returns (per m2) spacing: all returns (m) point density: last returns (per m2) spacing: last returns (m) / / / / / / / All Flights Combined /
32 Difference between strips and reference surface Scan Line Raw calibrated flight lines Mean Distance (m) Std. Deviation Flight lines following rigid body transformation Mean Distance Std. Deviation (m) m m

33 Known distances Measurement and Surveyed Distance (m) between Targets Scan Line TL to TR GL to GR Tl to GR TR to GL TL to TR m m m m m Average Combined Average 0.001m (Range -0.12m to 0.096m) TL = Building target to west TL = Building target to east GL = Central western ground target in front row (row next to building) GR = Central eastern ground target in front row (row next to building)



34



35 Terrestrial laser scan (TLS)

36
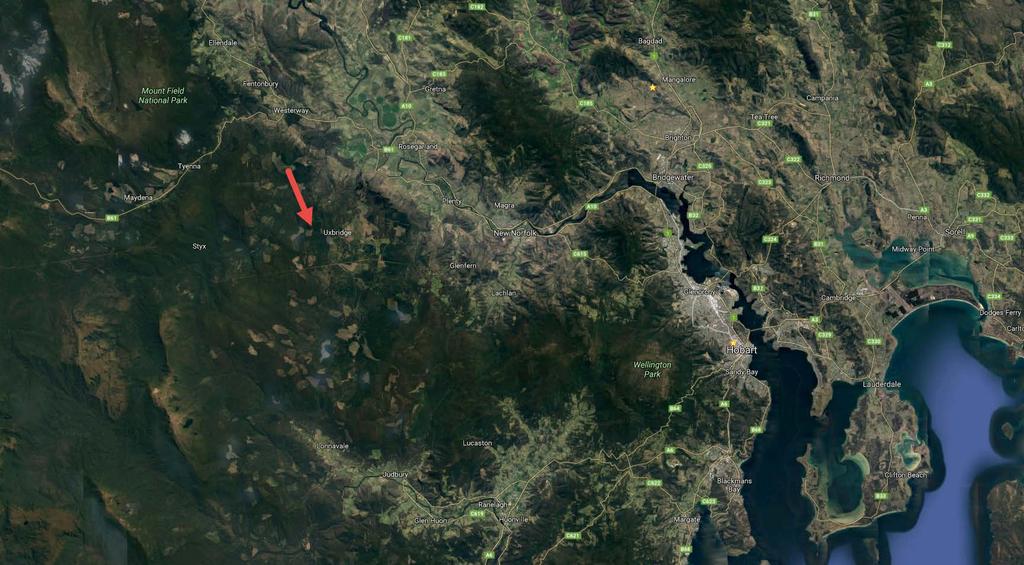
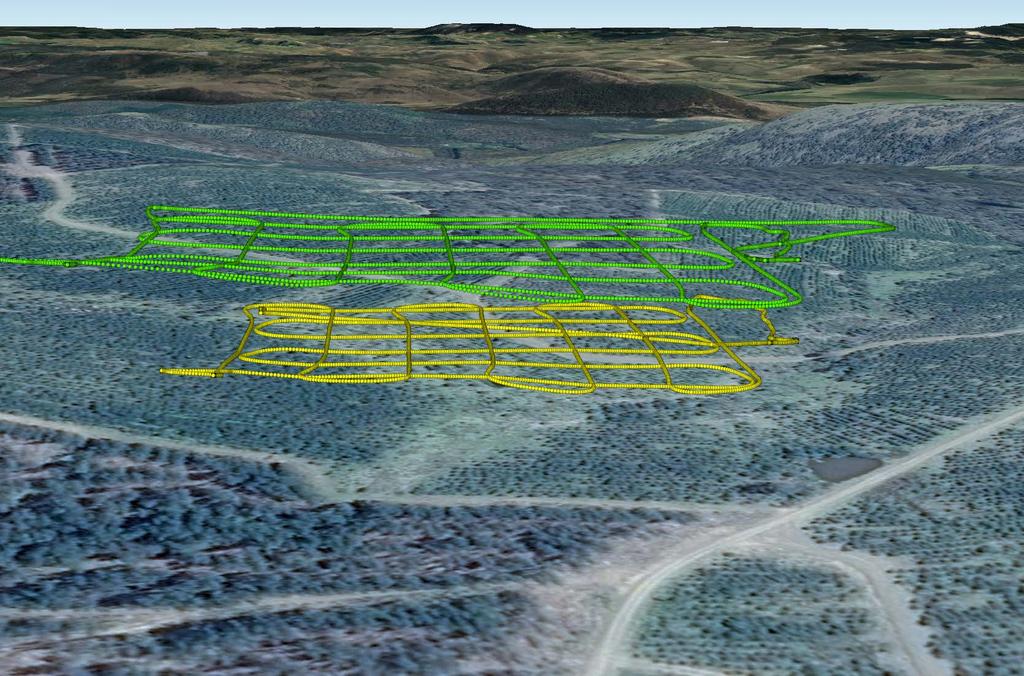
37 50 m AGL
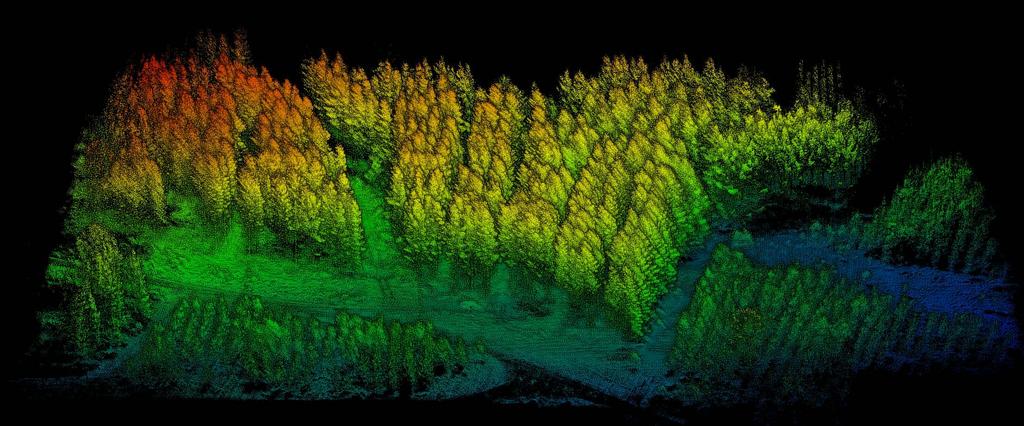
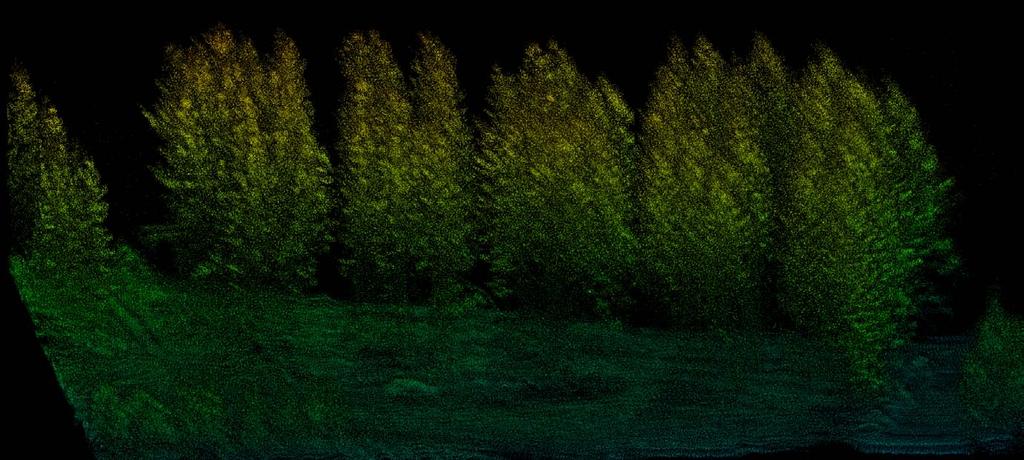
38 70 m AGL
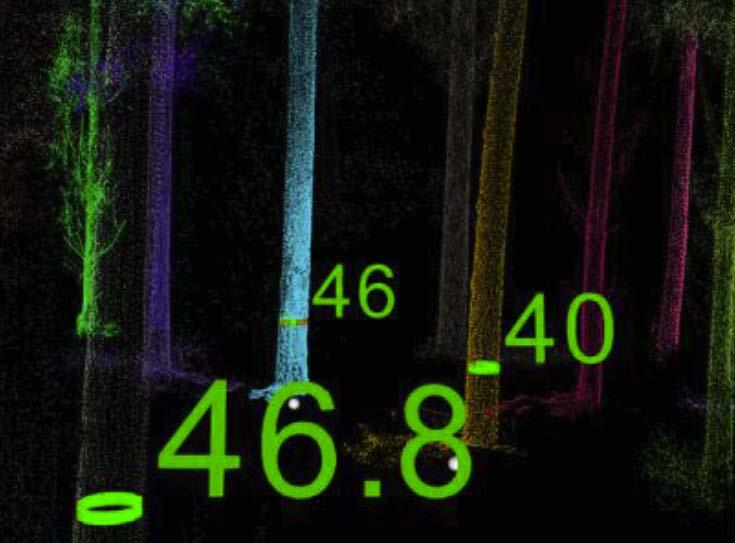
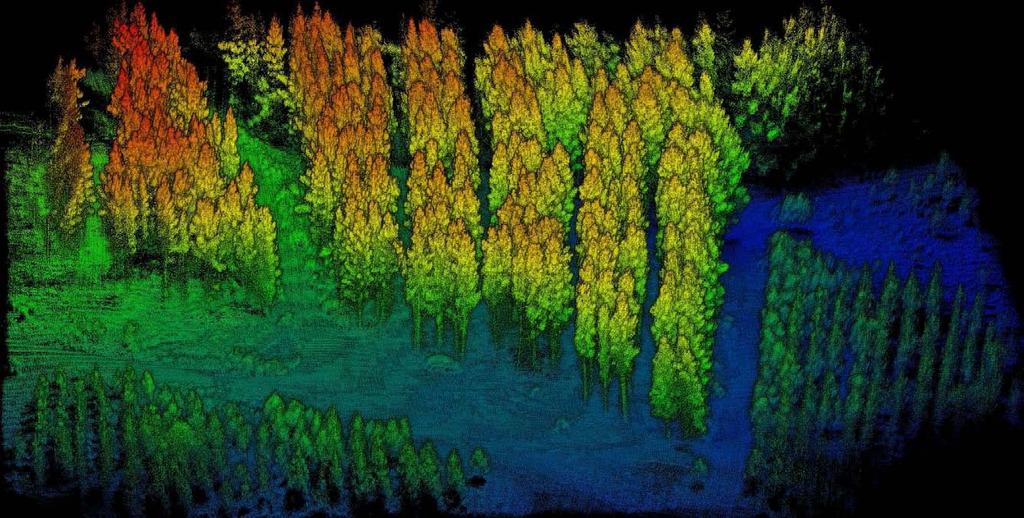
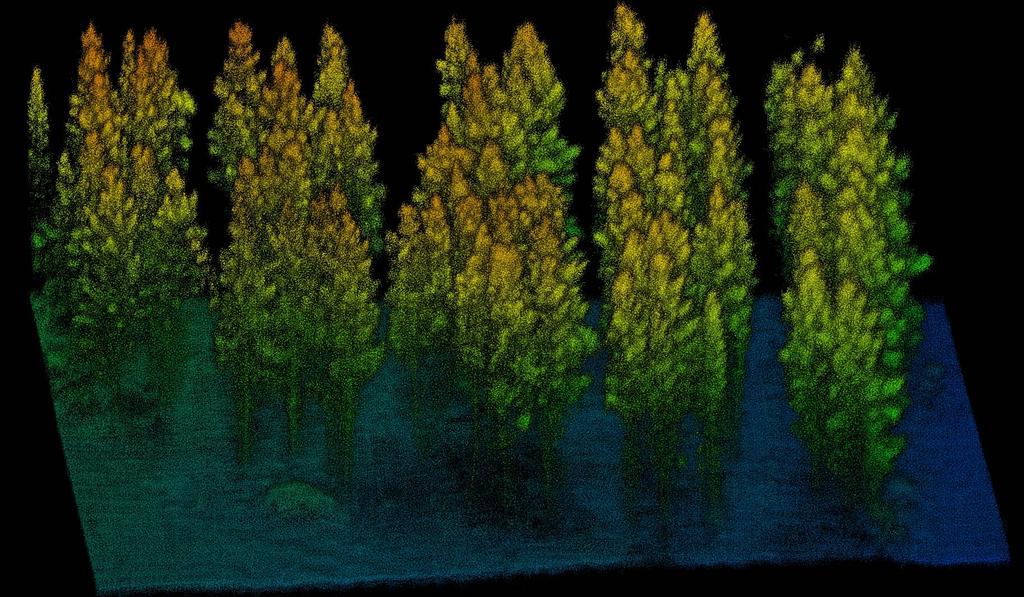
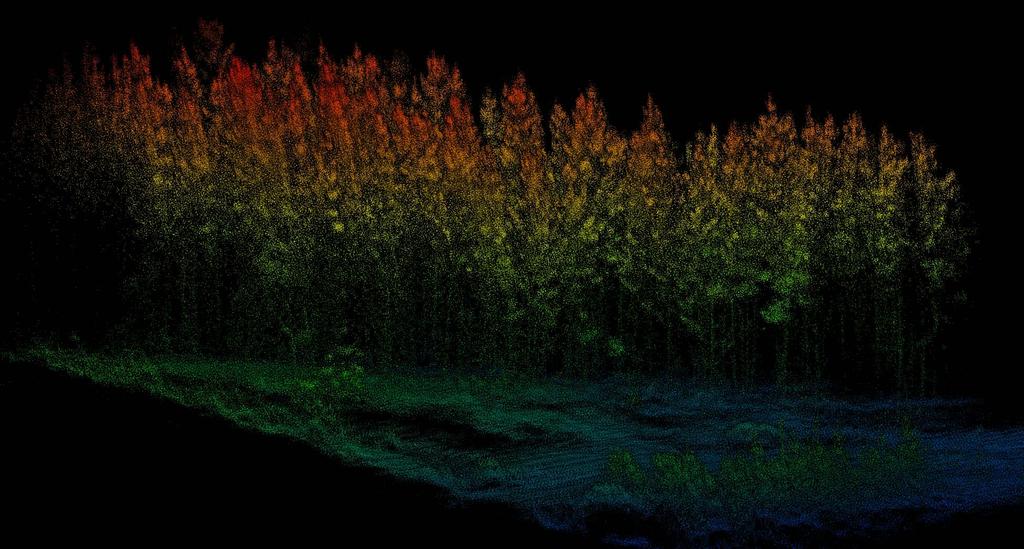
39 Conclusions UAS are an effective tool to capture vegetation structure at very high density LiDAR calibration for lever arm offsets and boresight angles is critical UAS LiDAR can collect extremely dense point clouds: pts/m 2 for typical flying heights m Absolute accuracy 7.8 cm from direct georeferencing; 4.6 after adjustment Next steps: Individual tree identification Separation of under-, mid-, overstory Characterisation of complex natural ecosystems Stem detection in pre-harvest stands
40 Acknowledgements Mr Richard Ballard, Dr Steve Harwin, Dr Darren Turner, Dr Josh Kelcey, Mr Tony Veness, Dr Zbynek Malenovsky, Dr Colin McCoull, Mr Deepak Gautam, Mr Iain Clarke, Drs Christopher Watson & Jon Osborn (UTAS) Dr Luke Wallace (RMIT) Forest and Wood Products Association (FWPA) Dr Christine Stone (DPI NSW) Australian Research Council (ARC) Australian Antarctic Division (AAD) Central Science Lab (CSL) & Engineering workshop School of Land and Food and UTAS support


41 Web: Web:
REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017
 REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017 SERVICES Visual Inspections Digital Terrain Models Aerial Imagery Volume Computations Thermal Inspections Photo maps Aerial Video Training & Consultancy
REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017 SERVICES Visual Inspections Digital Terrain Models Aerial Imagery Volume Computations Thermal Inspections Photo maps Aerial Video Training & Consultancy
PERFORMANCE EVALUATION OF suas EQUIPPED WITH VELODYNE HDL-32E LiDAR SENSOR
 PERFORMANCE EVALUATION OF suas EQUIPPED WITH VELODYNE HDL-32E LiDAR SENSOR G. Jozkow a, *, P. Wieczorek a, M. Karpina a, A. Walicka a, A. Borkowski a a Institute of Geodesy and Geoinformatics, Wroclaw
PERFORMANCE EVALUATION OF suas EQUIPPED WITH VELODYNE HDL-32E LiDAR SENSOR G. Jozkow a, *, P. Wieczorek a, M. Karpina a, A. Walicka a, A. Borkowski a a Institute of Geodesy and Geoinformatics, Wroclaw
Development of a UAV-LiDAR System with Application to Forest Inventory
 Remote Sens. 2012, 4, 1519-1543; doi:10.3390/rs4061519 OPEN ACCESS Remote Sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing Article Development of a UAV-LiDAR System with Application to Forest
Remote Sens. 2012, 4, 1519-1543; doi:10.3390/rs4061519 OPEN ACCESS Remote Sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing Article Development of a UAV-LiDAR System with Application to Forest
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Lidar Sensors, Today & Tomorrow. Christian Sevcik RIEGL Laser Measurement Systems
 Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
Lidar Sensors, Today & Tomorrow Christian Sevcik RIEGL Laser Measurement Systems o o o o Online Waveform technology Stand alone operation no field computer required Remote control through wireless network
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
LiForest Software White paper. TRGS, 3070 M St., Merced, 93610, Phone , LiForest
 0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
0 LiForest LiForest is a platform to manipulate large LiDAR point clouds and extract useful information specifically for forest applications. It integrates a variety of advanced LiDAR processing algorithms
Rigorous Scan Data Adjustment for kinematic LIDAR systems
 Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Rigorous Scan Data Adjustment for kinematic LIDAR systems Paul Swatschina Riegl Laser Measurement Systems ELMF Amsterdam, The Netherlands 13 November 2013 www.riegl.com Contents why kinematic scan data
Third Rock from the Sun
 Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Geodesy 101 AHD LiDAR Best Practice The Mystery of LiDAR Best Practice Glenn Jones SSSi GIS in the Coastal Environment Batemans Bay November 9, 2010 Light Detection and Ranging (LiDAR) Basic principles
Voxelised metrics for forest inventory. Grant Pearse Phenotype Cluster Group Meeting April 2018
 Voxelised metrics for forest inventory Grant Pearse Phenotype Cluster Group Meeting April 2018 Overview Voxelisation for forest inventory Background on LiDAR metric analysis Voxelisation what and why?
Voxelised metrics for forest inventory Grant Pearse Phenotype Cluster Group Meeting April 2018 Overview Voxelisation for forest inventory Background on LiDAR metric analysis Voxelisation what and why?
A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS
 A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS Dr Steve Harwin, UAV Operations, Tas KEY QUESTIONS What detail, scale and accuracy are needed? For change analysis the data
A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS Dr Steve Harwin, UAV Operations, Tas KEY QUESTIONS What detail, scale and accuracy are needed? For change analysis the data
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System
 Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Analysis of Different Reference Plane Setups for the Calibration of a Mobile Laser Scanning System 18. Internationaler Ingenieurvermessungskurs Graz, Austria, 25-29 th April 2017 Erik Heinz, Christian
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems
 Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
Development of a Test Field for the Calibration and Evaluation of Kinematic Multi Sensor Systems DGK-Doktorandenseminar Graz, Austria, 26 th April 2017 Erik Heinz Institute of Geodesy and Geoinformation
The development and application of a unmanned aerial vehicle laser scanning system for forest management
 The development and application of a unmanned aerial vehicle laser scanning system for forest management by Luke Oliver Wallace BSurvSpSc (Hons) School of Land & Food Submitted in fulfilment of the requirements
The development and application of a unmanned aerial vehicle laser scanning system for forest management by Luke Oliver Wallace BSurvSpSc (Hons) School of Land & Food Submitted in fulfilment of the requirements
Backpack-based inertial navigation and LiDAR mapping in forest environments
 Backpack-based inertial navigation and LiDAR mapping in forest environments Mattias Tjernqvist June 2017 Introduction 3D model our environment Light Detection And Ranging (LiDAR) - Light - Laser scanner
Backpack-based inertial navigation and LiDAR mapping in forest environments Mattias Tjernqvist June 2017 Introduction 3D model our environment Light Detection And Ranging (LiDAR) - Light - Laser scanner
A LIGHT-WEIGHT LASER SCANNER FOR UAV APPLICATIONS
 A LIGHT-WEIGHT LASER SCANNER FOR UAV APPLICATIONS A. M. G. Tommaselli a * F. M. Torres a a Univ Estadual Paulista, Unesp, Presidente Prudente, São Paulo, Brazil tomaseli@fct.unesp.br, nanda_fmt@hotmail.com
A LIGHT-WEIGHT LASER SCANNER FOR UAV APPLICATIONS A. M. G. Tommaselli a * F. M. Torres a a Univ Estadual Paulista, Unesp, Presidente Prudente, São Paulo, Brazil tomaseli@fct.unesp.br, nanda_fmt@hotmail.com
The YellowScan Surveyor: 5cm Accuracy Demonstrated
 The YellowScan Surveyor: 5cm Accuracy Demonstrated Pierre Chaponnière1 and Tristan Allouis2 1 Application Engineer, YellowScan 2 CTO, YellowScan Introduction YellowScan Surveyor, the very latest lightweight
The YellowScan Surveyor: 5cm Accuracy Demonstrated Pierre Chaponnière1 and Tristan Allouis2 1 Application Engineer, YellowScan 2 CTO, YellowScan Introduction YellowScan Surveyor, the very latest lightweight
Chapter 1: Overview. Photogrammetry: Introduction & Applications Photogrammetric tools:
 Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing
 for Remote Sensing") GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
GPS-Aided Inertial Navigation Systems (INS) for Remote Sensing www.inertiallabs.com 1 EVOLUTION OF REMOTE SENSING The latest progress in Remote sensing emerged more than 150 years ago, as balloonists took
Boresight alignment method for mobile laser scanning systems
 Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
Boresight alignment method for mobile laser scanning systems P. Rieger, N. Studnicka, M. Pfennigbauer RIEGL Laser Measurement Systems GmbH A-3580 Horn, Austria Contents A new principle of boresight alignment
GEOREFERENCING EXPERIMENTS WITH UAS IMAGERY
 GEOREFERENCING EXPERIMENTS WITH UAS IMAGERY G. Jóźków *, C. Toth Satellite Positioning and Inertial Navigation (SPIN) Laboratory The Ohio State University, Department of Civil, Environmental and Geodetic
GEOREFERENCING EXPERIMENTS WITH UAS IMAGERY G. Jóźków *, C. Toth Satellite Positioning and Inertial Navigation (SPIN) Laboratory The Ohio State University, Department of Civil, Environmental and Geodetic
A new flexible software tool for rapidly counting individual trees using point cloud data from lidar or photogrammetry
 A new flexible software tool for rapidly counting individual trees using point cloud data from lidar or photogrammetry Mitch Bryson 1, Lee Stamm 2, Amrit Kathuria 3 and Christine Stone 3 1 Australian Centre
A new flexible software tool for rapidly counting individual trees using point cloud data from lidar or photogrammetry Mitch Bryson 1, Lee Stamm 2, Amrit Kathuria 3 and Christine Stone 3 1 Australian Centre
Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150
 White Paper 3/17/2016 Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150 Omer Mian, Joe Hutton, Greg Lipa, James Lutes, Damir Gumerov, Srdjan Sobol Applanix, William Chan - GeoPixel
White Paper 3/17/2016 Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150 Omer Mian, Joe Hutton, Greg Lipa, James Lutes, Damir Gumerov, Srdjan Sobol Applanix, William Chan - GeoPixel
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018
 a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
Lecture 11. LiDAR, RADAR
 NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
NRMT 2270, Photogrammetry/Remote Sensing Lecture 11 Calculating the Number of Photos and Flight Lines in a Photo Project LiDAR, RADAR Tomislav Sapic GIS Technologist Faculty of Natural Resources Management
Hardware 3D Mapping Systems
 Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Hardware 3D Mapping Systems About Us GreenValley International GreenValley International provides 3D mapping solutions that include mobile & aerial LiDAR acquisition hardware, post-processing software
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
TECHNOLOGY AND INNOVATION. Deployment and integration of cost-effective high resolution remotely sensed data for the Australian forest industry
 TECHNOLOGY AND INNOVATION PROJECT NUMBER: PNC326-1314 December 2017 Deployment and integration of cost-effective high resolution remotely sensed data for the Australian forest industry This report can
TECHNOLOGY AND INNOVATION PROJECT NUMBER: PNC326-1314 December 2017 Deployment and integration of cost-effective high resolution remotely sensed data for the Australian forest industry This report can
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration. JAMIE YOUNG Senior Manager LiDAR Solutions
 Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
Terrestrial GPS setup Fundamentals of Airborne LiDAR Systems, Collection and Calibration JAMIE YOUNG Senior Manager LiDAR Solutions Topics Terrestrial GPS reference Planning and Collection Considerations
LiDAR data pre-processing for Ghanaian forests biomass estimation. Arbonaut, REDD+ Unit, Joensuu, Finland
 LiDAR data pre-processing for Ghanaian forests biomass estimation Arbonaut, REDD+ Unit, Joensuu, Finland Airborne Laser Scanning principle Objectives of the research Prepare the laser scanning data for
LiDAR data pre-processing for Ghanaian forests biomass estimation Arbonaut, REDD+ Unit, Joensuu, Finland Airborne Laser Scanning principle Objectives of the research Prepare the laser scanning data for
Lukas Paluchowski HySpex by Norsk Elektro Optikk AS
 HySpex Mjolnir the first scientific grade hyperspectral camera for UAV remote sensing Lukas Paluchowski HySpex by Norsk Elektro Optikk AS hyspex@neo.no lukas@neo.no 1 Geology: Rock scanning Courtesy of
HySpex Mjolnir the first scientific grade hyperspectral camera for UAV remote sensing Lukas Paluchowski HySpex by Norsk Elektro Optikk AS hyspex@neo.no lukas@neo.no 1 Geology: Rock scanning Courtesy of
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Drones for research - Observing the world in 3D from a LiDAR-UAV
 Drones for research - Observing the world in 3D from a LiDAR-UAV Program lunch seminar: Lammert Kooistra: The Unmanned Aerial Remote Sensing Facility goes 3D: Unmanned Aerial Laser Scanning Sander Mücher:
Drones for research - Observing the world in 3D from a LiDAR-UAV Program lunch seminar: Lammert Kooistra: The Unmanned Aerial Remote Sensing Facility goes 3D: Unmanned Aerial Laser Scanning Sander Mücher:
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy
 Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
Performance Evaluation of Optech's ALTM 3100: Study on Geo-Referencing Accuracy R. Valerie Ussyshkin, Brent Smith, Artur Fidera, Optech Incorporated BIOGRAPHIES Dr. R. Valerie Ussyshkin obtained a Ph.D.
Plantation Resource Mapping using LiDAR
 IFA Symposium Improving Plantation Productivity Mt Gambier, 12-14 May 2014 Field Day Tour Plantation Resource Mapping using LiDAR Christine Stone (NSW DPI) and Jan Rombouts (ForestrySA) Airborne Laser
IFA Symposium Improving Plantation Productivity Mt Gambier, 12-14 May 2014 Field Day Tour Plantation Resource Mapping using LiDAR Christine Stone (NSW DPI) and Jan Rombouts (ForestrySA) Airborne Laser
AN INTEGRATED SENSOR ORIENTATION SYSTEM FOR AIRBORNE PHOTOGRAMMETRIC APPLICATIONS
 AN INTEGRATED SENSOR ORIENTATION SYSTEM FOR AIRBORNE PHOTOGRAMMETRIC APPLICATIONS M. J. Smith a, *, N. Kokkas a, D.W.G. Park b a Faculty of Engineering, The University of Nottingham, Innovation Park, Triumph
AN INTEGRATED SENSOR ORIENTATION SYSTEM FOR AIRBORNE PHOTOGRAMMETRIC APPLICATIONS M. J. Smith a, *, N. Kokkas a, D.W.G. Park b a Faculty of Engineering, The University of Nottingham, Innovation Park, Triumph
Open Pit Mines. Terrestrial LiDAR and UAV Aerial Triangulation for. Figure 1: ILRIS at work
 Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Terrestrial LiDAR and UAV Aerial Triangulation for Open Pit Mines Figure 1: ILRIS at work Figure 2: Geo-Copter X-8000 taking off ay what you will about the past few years, it has produced some useful tools
Airborne LiDAR Data Acquisition for Forestry Applications. Mischa Hey WSI (Corvallis, OR)
") Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
Airborne LiDAR Data Acquisition for Forestry Applications Mischa Hey WSI (Corvallis, OR) WSI Services Corvallis, OR Airborne Mapping: Light Detection and Ranging (LiDAR) Thermal Infrared Imagery 4-Band
ifp Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report
 Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
Universität Stuttgart Performance of IGI AEROcontrol-IId GPS/Inertial System Final Report Institute for Photogrammetry (ifp) University of Stuttgart ifp Geschwister-Scholl-Str. 24 D M. Cramer: Final report
HAWAII KAUAI Survey Report. LIDAR System Description and Specifications
 HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
HAWAII KAUAI Survey Report LIDAR System Description and Specifications This survey used an Optech GEMINI Airborne Laser Terrain Mapper (ALTM) serial number 06SEN195 mounted in a twin-engine Navajo Piper
Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications
 Update / News in the context of Remote Sensing applications") Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
Luzern, Switzerland, acquired with GSD=5 cm, 2008. Leica - Airborne Digital Sensors (ADS80, ALS60) Update / News in the context of Remote Sensing applications Arthur Rohrbach, Sensor Sales Dir Europe,
2/9/2016. Session Agenda: Implementing new Geospatial Technologies for more efficient data capture
 Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
LiDAR Remote Sensing Data Collection: Yaquina and Elk Creek Watershed, Leaf-On Acquisition
 LiDAR Remote Sensing Data Collection: Yaquina and Elk Creek Watershed, Leaf-On Acquisition Submitted by: 4605 NE Fremont, Suite 211 Portland, Oregon 97213 April, 2006 Table of Contents LIGHT DETECTION
LiDAR Remote Sensing Data Collection: Yaquina and Elk Creek Watershed, Leaf-On Acquisition Submitted by: 4605 NE Fremont, Suite 211 Portland, Oregon 97213 April, 2006 Table of Contents LIGHT DETECTION
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Trimble VISION Positions from Pictures
 Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
Trimble VISION Positions from Pictures This session will cover What Is Trimble VISION? Trimble VISION Portfolio What Do you Need? How Does It Work & How Accurate Is It? Applications Resources Trimble VISION
UAV s in Surveying: Integration/processes/deliverables A-Z. 3Dsurvey.si
 UAV s in Surveying: Integration/processes/deliverables A-Z Info@eGPS.net TODAY S PROGRAM Introduction to photogrammetry and 3Dsurvey Theoretical facts about the technology and basics of 3dsurvey Introduction
UAV s in Surveying: Integration/processes/deliverables A-Z Info@eGPS.net TODAY S PROGRAM Introduction to photogrammetry and 3Dsurvey Theoretical facts about the technology and basics of 3dsurvey Introduction
Investigating the Structural Condition of Individual Trees using LiDAR Metrics
 Investigating the Structural Condition of Individual Trees using LiDAR Metrics Jon Murray 1, George Alan Blackburn 1, Duncan Whyatt 1, Christopher Edwards 2. 1 Lancaster Environment Centre, Lancaster University,
Investigating the Structural Condition of Individual Trees using LiDAR Metrics Jon Murray 1, George Alan Blackburn 1, Duncan Whyatt 1, Christopher Edwards 2. 1 Lancaster Environment Centre, Lancaster University,
InteLAS Family of Mobile LiDAR Systems
 InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
InteLAS Family of Mobile LiDAR Systems September 2015 What we do ilinks Geosolutions LLC Hydrographic surveying and seabed modeling Topographic surveying and mobile mapping Systems engineering and integration
G2-AS100. Presents: A mid-format fully integrated photogrammetric camera
 Presents: G2-AS100 A mid-format fully integrated photogrammetric camera Designed and manufactured by Global Geo Supplies, Inc. Lone Tree, Colorado USA 1 TABLE OF CONTENTS CAMERA SPECIFICATIONS LENSES PERFORMANCE
Presents: G2-AS100 A mid-format fully integrated photogrammetric camera Designed and manufactured by Global Geo Supplies, Inc. Lone Tree, Colorado USA 1 TABLE OF CONTENTS CAMERA SPECIFICATIONS LENSES PERFORMANCE
Evaluation of Structure from Motion (SfM) in Compact, Long Hallways
 in Compact, Long Hallways") Evaluation of Structure from Motion (SfM) in Compact, Long Hallways Structure from Motion (SfM) is an emerging technology which can generate 3D point clouds from a series of overlapping 2D images. Research
Evaluation of Structure from Motion (SfM) in Compact, Long Hallways Structure from Motion (SfM) is an emerging technology which can generate 3D point clouds from a series of overlapping 2D images. Research
SPAR, ELMF 2013, Amsterdam. Laser Scanning on the UK Highways Agency Network. Hamish Grierson Blom Uk
 SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
Digital Elevation Models
 Digital Elevation Models National Elevation Dataset 1 Data Sets US DEM series 7.5, 30, 1 o for conterminous US 7.5, 15 for Alaska US National Elevation Data (NED) GTOPO30 Global Land One-kilometer Base
Digital Elevation Models National Elevation Dataset 1 Data Sets US DEM series 7.5, 30, 1 o for conterminous US 7.5, 15 for Alaska US National Elevation Data (NED) GTOPO30 Global Land One-kilometer Base
ROAD-SCANNER COMPACT APPLICATION FIELDS MAIN FEATURES
 ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
ROAD-SCANNER COMPACT Mobile Mapping System by GEXCEL & SITECO collaboration A smaller mobile system for asset management and cartography suited for ZOLLER & FRÖHLICH PROFILER 9012 laser scanner. 2 + 3
Airborne LiDAR Surveys and Data Delivery in the Pipeline Industry
 Airborne LiDAR Surveys and Data Delivery in the Pipeline Industry Carlos Femmer Faron Olivier October 25, 2011 October 25, 2011 GITA GIS for Oil and Gas Pipeline 2011 Organization Fugro is a decentralized
Airborne LiDAR Surveys and Data Delivery in the Pipeline Industry Carlos Femmer Faron Olivier October 25, 2011 October 25, 2011 GITA GIS for Oil and Gas Pipeline 2011 Organization Fugro is a decentralized
STARTING WITH DRONES. Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS
 STARTING WITH DRONES Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS What this Talk is About UAV-based data acquisition: What you need to get involved Processes in getting spatial
STARTING WITH DRONES Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS What this Talk is About UAV-based data acquisition: What you need to get involved Processes in getting spatial
LiDAR Data Processing:
 LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
LiDAR Data Processing: Concepts and Methods for LEFI Production Gordon W. Frazer GWF LiDAR Analytics Outline of Presentation Data pre-processing Data quality checking and options for repair Data post-processing
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
(Subsea) Keith Vickery Zupt LLC
 Keith Vickery Zupt LLC") (Subsea) Keith Vickery Zupt LLC kv@zupt.com Offshore subsea infrastructure surveys (pipeline inspection, well, XT, and manifold inspections) are required to ensure compliance with both internal operator,
(Subsea) Keith Vickery Zupt LLC kv@zupt.com Offshore subsea infrastructure surveys (pipeline inspection, well, XT, and manifold inspections) are required to ensure compliance with both internal operator,
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR
 Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Redefining Airborne LiDAR Introduction to RIEGL LMS in Airborne LiDAR Andres Vargas Integration Systems Engineer LAGF Mexico City, Mexico September 23th, 2014 1 Airborne Laser Scanning History and Evolution
Trimble GeoSpatial Products
 Expanding Solutions for Photogrammetric and Remote Sensing Professionals 55 th Photogrammetric Week in Stuttgart September 7 th 2015 Tobias Heuchel, Trimble Stuttgart, Germany Trimble GeoSpatial Products
Expanding Solutions for Photogrammetric and Remote Sensing Professionals 55 th Photogrammetric Week in Stuttgart September 7 th 2015 Tobias Heuchel, Trimble Stuttgart, Germany Trimble GeoSpatial Products
PERFORMANCE ANALYSIS OF FAST AT FOR CORRIDOR AERIAL MAPPING
 PERFORMANCE ANALYSIS OF FAST AT FOR CORRIDOR AERIAL MAPPING M. Blázquez, I. Colomina Institute of Geomatics, Av. Carl Friedrich Gauss 11, Parc Mediterrani de la Tecnologia, Castelldefels, Spain marta.blazquez@ideg.es
PERFORMANCE ANALYSIS OF FAST AT FOR CORRIDOR AERIAL MAPPING M. Blázquez, I. Colomina Institute of Geomatics, Av. Carl Friedrich Gauss 11, Parc Mediterrani de la Tecnologia, Castelldefels, Spain marta.blazquez@ideg.es
UAS based laser scanning for forest inventory and precision farming
 UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
UAS based laser scanning for forest inventory and precision farming M. Pfennigbauer, U. Riegl, P. Rieger, P. Amon RIEGL Laser Measurement Systems GmbH, 3580 Horn, Austria Email: mpfennigbauer@riegl.com,
Graph based INS-camera calibration
 Graph based INS-camera calibration D. Bender a,b, M. Schikora a,b, J. Sturm b, D. Cremers b a Dept. Sensor Data and Information Fusion, Fraunhofer FKIE, Wachtberg, Germany b Computer Vision Group, Technical
Graph based INS-camera calibration D. Bender a,b, M. Schikora a,b, J. Sturm b, D. Cremers b a Dept. Sensor Data and Information Fusion, Fraunhofer FKIE, Wachtberg, Germany b Computer Vision Group, Technical
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery
 Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Runway Centerline Deviation Estimation from Point Clouds using LiDAR imagery Seth Young 1, Charles Toth 2, Zoltan Koppanyi 2 1 Department of Civil, Environmental and Geodetic Engineering The Ohio State
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer
 Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Automating Data Alignment from Multiple Collects Author: David Janssen Optech Incorporated,Senior Technical Engineer Stand in Presenter: David Collison Optech Incorporated, Regional Sales Manager Introduction
Qinertia THE NEXT GENERATION INS/GNSS POST-PROCESSING SOFTWARE. For all mobile surveying applications
 Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Qinertia THE NEXT GENERATION /GNSS POST-PROCESSING SOFTWARE For all mobile surveying applications Survey Efficiently, Survey Anywhere, Survey Serenely. QINERTIA has been designed to help surveyors get
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology. Maziana Muhamad
 Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Overview. 1. Aerial LiDAR in Wisconsin (20 minutes) 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes)
 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes)") Overview 1. Aerial LiDAR in Wisconsin (20 minutes) 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes) 4. Aerial lidar technology advancements (15 minutes) 5. Q & A 1. Aerial
Overview 1. Aerial LiDAR in Wisconsin (20 minutes) 2. Demonstration of data in CAD (30 minutes) 3. High Density LiDAR (20 minutes) 4. Aerial lidar technology advancements (15 minutes) 5. Q & A 1. Aerial
1. LiDAR System Description and Specifications
 High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
High Point Density LiDAR Survey of Mayapan, MX PI: Timothy S. Hare, Ph.D. Timothy S. Hare, Ph.D. Associate Professor of Anthropology Institute for Regional Analysis and Public Policy Morehead State University
THE INTERIOR AND EXTERIOR CALIBRATION FOR ULTRACAM D
 THE INTERIOR AND EXTERIOR CALIBRATION FOR ULTRACAM D K. S. Qtaishat, M. J. Smith, D. W. G. Park Civil and Environment Engineering Department, Mu ta, University, Mu ta, Karak, Jordan, 61710 khaldoun_q@hotamil.com
THE INTERIOR AND EXTERIOR CALIBRATION FOR ULTRACAM D K. S. Qtaishat, M. J. Smith, D. W. G. Park Civil and Environment Engineering Department, Mu ta, University, Mu ta, Karak, Jordan, 61710 khaldoun_q@hotamil.com
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
W D-0049/004 EN
 September 21, 2011 Contact Ground Survey Report, Lidar Accuracy Report, & Project Report New Madrid Seismic Zone Northeast of Memphis, Tennessee Contract Number: W91278-09D-0049/004 EN Project: C-10-026
September 21, 2011 Contact Ground Survey Report, Lidar Accuracy Report, & Project Report New Madrid Seismic Zone Northeast of Memphis, Tennessee Contract Number: W91278-09D-0049/004 EN Project: C-10-026
Aerial and Mobile LiDAR Data Fusion
 Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Creating Value Delivering Solutions Aerial and Mobile LiDAR Data Fusion Dr. Srini Dharmapuri, CP, PMP What You Will Learn About LiDAR Fusion Mobile and Aerial LiDAR Technology Components & Parameters Project
Multisensoral UAV-Based Reference Measurements for Forestry Applications
 Multisensoral UAV-Based Reference Measurements for Forestry Applications Research Manager D.Sc. Anttoni Jaakkola Centre of Excellence in Laser Scanning Research 2 Outline UAV applications Reference level
Multisensoral UAV-Based Reference Measurements for Forestry Applications Research Manager D.Sc. Anttoni Jaakkola Centre of Excellence in Laser Scanning Research 2 Outline UAV applications Reference level
UAS Campus Survey Project
 ARTICLE STUDENTS CAPTURING SPATIAL INFORMATION NEEDS UAS Campus Survey Project Texas A&M University- Corpus Christi, home to the largest geomatics undergraduate programme in Texas, USA, is currently undergoing
ARTICLE STUDENTS CAPTURING SPATIAL INFORMATION NEEDS UAS Campus Survey Project Texas A&M University- Corpus Christi, home to the largest geomatics undergraduate programme in Texas, USA, is currently undergoing
Airborne Laser Scanning: Remote Sensing with LiDAR
 Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
Airborne Laser Scanning: Remote Sensing with LiDAR ALS / LIDAR OUTLINE Laser remote sensing background Basic components of an ALS/LIDAR system Two distinct families of ALS systems Waveform Discrete Return
William E. Dietrich Professor 313 McCone Phone Fax (fax)
") February 13, 2007. Contact information William E. Dietrich Professor 313 McCone Phone 510-642-2633 Fax 510-643-9980 (fax) bill@eps.berkeley.edu Project location: Northwest of the Golden Gate Bridge, San
February 13, 2007. Contact information William E. Dietrich Professor 313 McCone Phone 510-642-2633 Fax 510-643-9980 (fax) bill@eps.berkeley.edu Project location: Northwest of the Golden Gate Bridge, San
A Comparison of Laser Scanners for Mobile Mapping Applications
 A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
A Comparison of Laser Scanners for Mobile Mapping Applications Craig Glennie 1, Jerry Dueitt 2 1 Department of Civil & Environmental Engineering The University of Houston 3605 Cullen Boulevard, Room 2008
LIDAR MAPPING FACT SHEET
 1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation
 Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Development of a Portable Mobile Laser Scanning System with Special Focus on the System Calibration and Evaluation MCG 2016, Vichy, France, 5-6 th October Erik Heinz, Christian Eling, Markus Wieland, Lasse
Mobile LiDAR for Ground Applications. Spar 2006, March Paul Mrstik, Terrapoint Canada Inc. Craig Glennie, Terrapoint USA LLC
 Mobile LiDAR for Ground Applications Spar 2006, March 27 2006 Paul Mrstik, Terrapoint Canada Inc. Craig Glennie, Terrapoint USA LLC Agenda Introduction to Terrapoint What is mobile LiDAR? Advantages of
Mobile LiDAR for Ground Applications Spar 2006, March 27 2006 Paul Mrstik, Terrapoint Canada Inc. Craig Glennie, Terrapoint USA LLC Agenda Introduction to Terrapoint What is mobile LiDAR? Advantages of
Snow cover change detection with laser scanning range and brightness measurements
 Snow cover change detection with laser scanning range and brightness measurements Sanna Kaasalainen, Harri Kaartinen, Antero Kukko, Henri Niittymäki Department of Remote Sensing and Photogrammetry 5th
Snow cover change detection with laser scanning range and brightness measurements Sanna Kaasalainen, Harri Kaartinen, Antero Kukko, Henri Niittymäki Department of Remote Sensing and Photogrammetry 5th
TAKING LIDAR SUBSEA. Adam Lowry, Nov 2016
 TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
TAKING LIDAR SUBSEA Adam Lowry, Nov 2016 3D AT DEPTH Based in the technology hub of Boulder, Colorado, 3D at Depth is dedicated to the development of underwater laser measurement sensors and software Patented
INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING
 INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING Xianfeng Huang 1,2 Armin Gruen 1, Rongjun Qin 1 Tangwu Du 1, Wei Fang 1 1 Singapore-ETH Center, Future
INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING Xianfeng Huang 1,2 Armin Gruen 1, Rongjun Qin 1 Tangwu Du 1, Wei Fang 1 1 Singapore-ETH Center, Future
Unmanned Aerial Systems: A Look Into UAS at ODOT
 Ohio Department of Transportation John R. Kasich, Governor Jerry Wray, Director Unmanned Aerial Systems: Tim Burkholder, PS Mapping Manager Division of Engineering Office of CADD and Mapping Services Kyle
Ohio Department of Transportation John R. Kasich, Governor Jerry Wray, Director Unmanned Aerial Systems: Tim Burkholder, PS Mapping Manager Division of Engineering Office of CADD and Mapping Services Kyle
GEO 6895: Airborne laser scanning - workflow, applications, value. Christian Hoffmann
 GEO 6895: Airborne laser scanning - workflow, applications, value. Christian Hoffmann Agenda Why LiDAR? The value of an end-to-end workflow The Trimble AX-Series Data processing & modelling Information
GEO 6895: Airborne laser scanning - workflow, applications, value. Christian Hoffmann Agenda Why LiDAR? The value of an end-to-end workflow The Trimble AX-Series Data processing & modelling Information
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain
 Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
Assessing 3D Point Cloud Fidelity of UAS SfM Software Solutions Over Varying Terrain Michael Schwind, Michael J. Starek (Presenter) 18th Annual JALBTCX Airborne Coastal Mapping and Charting Technical Workshop,
Lidar Technical Report
 Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Lidar Technical Report Oregon Department of Forestry Sites Presented to: Oregon Department of Forestry 2600 State Street, Building E Salem, OR 97310 Submitted by: 3410 West 11st Ave. Eugene, OR 97402 April
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots
 Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Construction and Calibration of a Low-Cost 3D Laser Scanner with 360º Field of View for Mobile Robots Jorge L. Martínez, Jesús Morales, Antonio, J. Reina, Anthony Mandow, Alejandro Pequeño-Boter*, and
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
Leica ALS70. Airborne Laser Scanners Performance for diverse Applications
 Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
Leica ALS70 Airborne Laser Scanners Performance for diverse Applications Three Models, One Result. Highest Productivity in all Applications. Imagine an affordable 500 khz pulse rate city-mapping LIDAR
MODELING OF THE PLAN DA MATTUN ARCHAEOLOGICAL SITE USING A COMBINATION OF DIFFERENT SENSORS
 MODELING OF THE PLAN DA MATTUN ARCHAEOLOGICAL SITE USING A COMBINATION OF DIFFERENT SENSORS D. Novák, P. Tokarczyk*, P.W. Theiler Institute of Geodesy and Photogrammetry, ETH Zürich, 8093 Zürich, Switzerland
MODELING OF THE PLAN DA MATTUN ARCHAEOLOGICAL SITE USING A COMBINATION OF DIFFERENT SENSORS D. Novák, P. Tokarczyk*, P.W. Theiler Institute of Geodesy and Photogrammetry, ETH Zürich, 8093 Zürich, Switzerland
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and