Mapping Road surface condition using Unmanned Aerial Vehicle- Based Imaging System. Ahmed F. Elaksher St. Cloud State University
|
|
|
- Alicia May
- 6 years ago
- Views:
Transcription
1 Mapping Road surface condition using Unmanned Aerial Vehicle- Based Imaging System Ahmed F. Elaksher St. Cloud State University 1
2 Outline Introduction & Motivation Methodology Experimental Results & Analysis 2
3 Introduction & Motivation 3



4 UAV: Unmanned Aerial Vehicle Scan Eagle Weight: 40-pounds Travel more than 15 hours Cruising at speeds 60 mph Altitude 5000m. EMT Aladin Weight: 6 pounds Travel about 60 minutes Cruising speed 100 mps Altitude: m RQ-4 Global Hawk Weight: 8490 pounds Travel more than 36 hours Cruising at speeds 404 mph Altitude 19928m. Source: 4
5 Advantages of UAV in remote sensing UAVs are highly flexible source for remote sensing data. UAVs can be programmed off-line and controlled in real time to navigate and to collect data. UAVs are able to operate rather close to the object, acquiring image with resolution as fine as a few centimeters UAVs have other advantages over satellites and manned aircraft, such as collecting image data at a lower cost, faster and more safely. 5

 fire")
")

6 Applications of UAV in remote sensing mapping urban and suburban areas (Spatalas et. al, 2006) fire monitoring (Zhou, 2005) road following (Egbert, 2007) modeling of archaeological sites (Pueschel et. al, 2008; Eisenbeiss, 2004;)

7 UAV mapping system 7




8 Remote control ground control station 8
9 The helicopter: weights 15lb, can reach 200m, maximum speed of 10m per second. GPS receiver: provides the 3D coordinates information Inertial Navigation System: provides the orientation and velocity of the UAV. Autopilot board: acquires GPS & inertial navigation system data, and control the flight & camera. The Autopilot board can be controlled with manual remote control and can be engaged/disengaged upon the command. Camera: Canon EOS Digital Rebel XTi digital camera, f=50mm, 3888x2592pixels, pixel size of 5.7µm Ground Control: The wegcs software is installed on the GCS computer. The software features an interface for mission planning allowing for setting of mission parameters. 9



10 10
11 Methodology 11
12 UAV-acquired Imagery Camera Calibration Parameters Iteratively Forming Image Block Select one pair of stereo images and perform relative orientation Generate/update 3D model coordinates Add neighboring overlapping image and perform space resection Bundle adjustment Bundle block adjustment 3D point coordinates 12




13 Camera calibration The aim of camera calibration is to calculate the so-called inner orientation parameters (focal length, lens distortion, ). Color-coded targets are used and In this research, the camera calibration is performed via the iwitness scooftware. 13
14 UAV-acquired Imagery






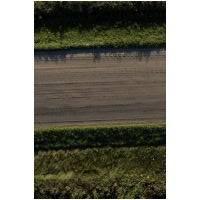

15 Test site 15



16 Stereo images relative orientation Location of conjugate points across images Point matching by comparing of attributes SIFT algorithm for feature point extraction
17 Determine the relative orientation of the two images. This serves the starting point of the whole image network

18 Generate 3D model coordinates Add the neighboring images, iteratively to the image block Perform bundle adjustment of the formed image network to simultaneously determine the orientation parameters of the all images
19 19

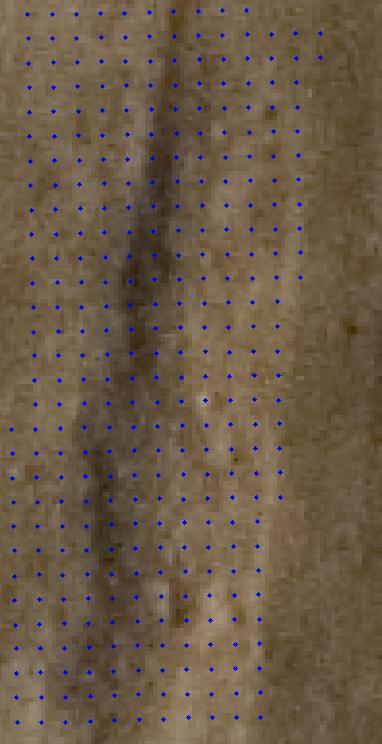
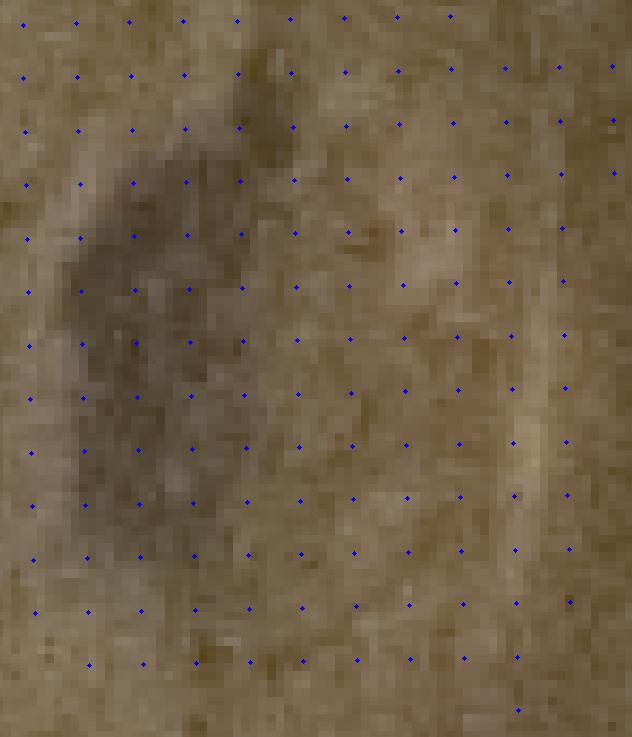
20 3D point coordinates An efficient approach to process the UAV-acquired imagery to derive 3D road surface fully automatically. Since a point on a road is captured in consecutive images, thus, by reversing the imaging process, its 3D position can be computed through the intersection of the image rays. The fundamental process to automate this procedure is to locate the corresponding points in image space. This is achieved by automated image matching. 20
21 Experimental Results & Analysis 21

22 Research and Development 22



23 Results 23

24 24


25 25


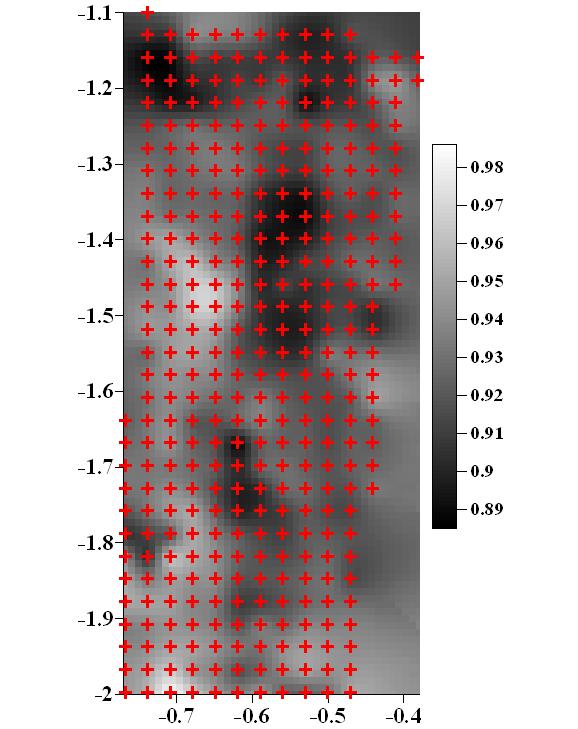
26 Analysis The depth of the potholes is around 1.5~2 inches measured in field with tape. The maximum depths of the ruts and potholes are 1.5 ~2. Comparison with field survey with tape was also conducted. The differences between image-based measurement and field survey are within the range of , demonstrating good performance of the system. 26

27 27
THREE DIMENSIONAL CURVE HALL RECONSTRUCTION USING SEMI-AUTOMATIC UAV
 THREE DIMENSIONAL CURVE HALL RECONSTRUCTION USING SEMI-AUTOMATIC UAV Muhammad Norazam Zulgafli 1 and Khairul Nizam Tahar 1,2 1 Centre of Studies for Surveying Science and Geomatics, Faculty of Architecture
THREE DIMENSIONAL CURVE HALL RECONSTRUCTION USING SEMI-AUTOMATIC UAV Muhammad Norazam Zulgafli 1 and Khairul Nizam Tahar 1,2 1 Centre of Studies for Surveying Science and Geomatics, Faculty of Architecture
Overview of the Trimble TX5 Laser Scanner
 Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Overview of the Trimble TX5 Laser Scanner Trimble TX5 Revolutionary and versatile scanning solution Compact / Lightweight Efficient Economical Ease of Use Small and Compact Smallest and most compact 3D
Photogrammetry: A Modern Tool for Crash Scene Mapping
 Photogrammetry: A Modern Tool for Crash Scene Mapping Background A police accident investigator (AI) has many tasks when arriving at a crash scene. The officer s highest priority is public safety; the
Photogrammetry: A Modern Tool for Crash Scene Mapping Background A police accident investigator (AI) has many tasks when arriving at a crash scene. The officer s highest priority is public safety; the
Rectification Algorithm for Linear Pushbroom Image of UAV
 Rectification Algorithm for Linear Pushbroom Image of UAV Ruoming SHI and Ling ZHU INTRODUCTION In recent years, unmanned aerial vehicle (UAV) has become a strong supplement and an important complement
Rectification Algorithm for Linear Pushbroom Image of UAV Ruoming SHI and Ling ZHU INTRODUCTION In recent years, unmanned aerial vehicle (UAV) has become a strong supplement and an important complement
Commercial suas The Right Tool for the Right Job
 Commercial suas The Right Tool for the Right Job Presentation Objectives Overview of current data collection technologies UAS Systems Overview Surveyor 2.0 Project Case Study Mobile LiDAR & suas How Do
Commercial suas The Right Tool for the Right Job Presentation Objectives Overview of current data collection technologies UAS Systems Overview Surveyor 2.0 Project Case Study Mobile LiDAR & suas How Do
APPLICATION OF AERIAL VIDEO FOR TRAFFIC FLOW MONITORING AND MANAGEMENT
 Pitu Mirchandani, Professor, Department of Systems and Industrial Engineering Mark Hickman, Assistant Professor, Department of Civil Engineering Alejandro Angel, Graduate Researcher Dinesh Chandnani, Graduate
Pitu Mirchandani, Professor, Department of Systems and Industrial Engineering Mark Hickman, Assistant Professor, Department of Civil Engineering Alejandro Angel, Graduate Researcher Dinesh Chandnani, Graduate
Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150
 White Paper 3/17/2016 Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150 Omer Mian, Joe Hutton, Greg Lipa, James Lutes, Damir Gumerov, Srdjan Sobol Applanix, William Chan - GeoPixel
White Paper 3/17/2016 Accuracy Assessment of POS AVX 210 integrated with the Phase One ixu150 Omer Mian, Joe Hutton, Greg Lipa, James Lutes, Damir Gumerov, Srdjan Sobol Applanix, William Chan - GeoPixel
PHOTOGRAMMETRIC PROCESSING OF LOW ALTITUDE IMAGE SEQUENCES BY UNMANNED AIRSHIP
 PHOTOGRAMMETRIC PROCESSING OF LOW ALTITUDE IMAGE SEQUENCES BY UNMANNED AIRSHIP Yongjun Zhang School of Remote Sensing and Information Engineering, Wuhan University, Wuhan, Hubei, 430079, P.R. China - zhangyj@whu.edu.cn
PHOTOGRAMMETRIC PROCESSING OF LOW ALTITUDE IMAGE SEQUENCES BY UNMANNED AIRSHIP Yongjun Zhang School of Remote Sensing and Information Engineering, Wuhan University, Wuhan, Hubei, 430079, P.R. China - zhangyj@whu.edu.cn
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018
 a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
a Geo-Odyssey of UAS LiDAR Mapping Henno Morkel UAS Segment Specialist DroneCon 17 May 2018 Abbreviations UAS Unmanned Aerial Systems LiDAR Light Detection and Ranging UAV Unmanned Aerial Vehicle RTK Real-time
STARTING WITH DRONES. Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS
 STARTING WITH DRONES Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS What this Talk is About UAV-based data acquisition: What you need to get involved Processes in getting spatial
STARTING WITH DRONES Data Collection and Remote Sensing with UAVs, etc. Dr. Bill Hazelton LS What this Talk is About UAV-based data acquisition: What you need to get involved Processes in getting spatial
INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING
 INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING Xianfeng Huang 1,2 Armin Gruen 1, Rongjun Qin 1 Tangwu Du 1, Wei Fang 1 1 Singapore-ETH Center, Future
INTEGRATION OF MOBILE LASER SCANNING DATA WITH UAV IMAGERY FOR VERY HIGH RESOLUTION 3D CITY MODELING Xianfeng Huang 1,2 Armin Gruen 1, Rongjun Qin 1 Tangwu Du 1, Wei Fang 1 1 Singapore-ETH Center, Future
Quality Accuracy Professionalism
 GeoWing - who are we? Mapping Data Service Provider Lidar Multispectral Topographic and Planimetric Maps Elevation Models Point Clouds / 3D Models Orthophotography FAA-Authorized UAS Operators WOSB / DBE
GeoWing - who are we? Mapping Data Service Provider Lidar Multispectral Topographic and Planimetric Maps Elevation Models Point Clouds / 3D Models Orthophotography FAA-Authorized UAS Operators WOSB / DBE
2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE
 Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Co-Host Host 2-4 April 2019 Taets Art and Event Park, Amsterdam CLICK TO KNOW MORE Presentation Outline review modern survey methodologies available to support railway requirements measuring everything
Reality Modeling Drone Capture Guide
 Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Reality Modeling Drone Capture Guide Discover the best practices for photo acquisition-leveraging drones to create 3D reality models with ContextCapture, Bentley s reality modeling software. Learn the
Photogrammetry: DTM Extraction & Editing
 Photogrammetry: DTM Extraction & Editing Review of terms Vertical aerial photograph Perspective center Exposure station Fiducial marks Principle point Air base (Exposure Station) Digital Photogrammetry:
Photogrammetry: DTM Extraction & Editing Review of terms Vertical aerial photograph Perspective center Exposure station Fiducial marks Principle point Air base (Exposure Station) Digital Photogrammetry:
Exterior Orientation Parameters
 Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Exterior Orientation Parameters PERS 12/2001 pp 1321-1332 Karsten Jacobsen, Institute for Photogrammetry and GeoInformation, University of Hannover, Germany The georeference of any photogrammetric product
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
TopoDrone Photogrammetric Mapping Reliable, Accurate, Safe
 TopoDrone Photogrammetric Mapping Reliable, Accurate, Safe A complete solution for accurate airborne data capture and photogrammetric mapping using an unmanned aerial vehicle COST EFFICIENT SOLUTION TO
TopoDrone Photogrammetric Mapping Reliable, Accurate, Safe A complete solution for accurate airborne data capture and photogrammetric mapping using an unmanned aerial vehicle COST EFFICIENT SOLUTION TO
THE DIRECT GEOREFERENCING APPLICATION AND PERFORMANCE ANALYSIS OF UAV HELICOPTER IN GCP-FREE AREA
 THE DIRECT GEOREFERENCING APPLICATION AND PERFORMANCE ANALYSIS OF UAV HELICOPTER IN GCP-FREE AREA C.F. Lo a, M.L. Tsai b, *, K.W. Chiang c, C.H. Chu d, G.J. Tsai e, C.K. Cheng f, N. El-Sheimy g, H. Ayman
THE DIRECT GEOREFERENCING APPLICATION AND PERFORMANCE ANALYSIS OF UAV HELICOPTER IN GCP-FREE AREA C.F. Lo a, M.L. Tsai b, *, K.W. Chiang c, C.H. Chu d, G.J. Tsai e, C.K. Cheng f, N. El-Sheimy g, H. Ayman
A New Protocol of CSI For The Royal Canadian Mounted Police
 A New Protocol of CSI For The Royal Canadian Mounted Police I. Introduction The Royal Canadian Mounted Police started using Unmanned Aerial Vehicles to help them with their work on collision and crime
A New Protocol of CSI For The Royal Canadian Mounted Police I. Introduction The Royal Canadian Mounted Police started using Unmanned Aerial Vehicles to help them with their work on collision and crime
Characterizing Strategies of Fixing Full Scale Models in Construction Photogrammetric Surveying. Ryan Hough and Fei Dai
 697 Characterizing Strategies of Fixing Full Scale Models in Construction Photogrammetric Surveying Ryan Hough and Fei Dai West Virginia University, Department of Civil and Environmental Engineering, P.O.
697 Characterizing Strategies of Fixing Full Scale Models in Construction Photogrammetric Surveying Ryan Hough and Fei Dai West Virginia University, Department of Civil and Environmental Engineering, P.O.
Jeffrey A. Schepers P.S. EIT Geospatial Services Holland Engineering Inc. 220 Hoover Blvd, Suite 2, Holland, MI Desk
 Jeffrey A. Schepers P.S. EIT Geospatial Services Holland Engineering Inc. 220 Hoover Blvd, Suite 2, Holland, MI 49423 616-594-5127 Desk 616-322-1724 Cell 616-392-5938 Office Mobile LiDAR - Laser Scanning
Jeffrey A. Schepers P.S. EIT Geospatial Services Holland Engineering Inc. 220 Hoover Blvd, Suite 2, Holland, MI 49423 616-594-5127 Desk 616-322-1724 Cell 616-392-5938 Office Mobile LiDAR - Laser Scanning
TRAINING MATERIAL HOW TO OPTIMIZE ACCURACY WITH CORRELATOR3D
 TRAINING MATERIAL WITH CORRELATOR3D Page2 Contents 1. UNDERSTANDING INPUT DATA REQUIREMENTS... 4 1.1 What is Aerial Triangulation?... 4 1.2 Recommended Flight Configuration... 4 1.3 Data Requirements for
TRAINING MATERIAL WITH CORRELATOR3D Page2 Contents 1. UNDERSTANDING INPUT DATA REQUIREMENTS... 4 1.1 What is Aerial Triangulation?... 4 1.2 Recommended Flight Configuration... 4 1.3 Data Requirements for
Unmanned Aerial Systems: A Look Into UAS at ODOT
 Ohio Department of Transportation John R. Kasich, Governor Jerry Wray, Director Unmanned Aerial Systems: Tim Burkholder, PS Mapping Manager Division of Engineering Office of CADD and Mapping Services Kyle
Ohio Department of Transportation John R. Kasich, Governor Jerry Wray, Director Unmanned Aerial Systems: Tim Burkholder, PS Mapping Manager Division of Engineering Office of CADD and Mapping Services Kyle
Sensor Fusion: Potential, Challenges and Applications. Presented by KVH Industries and Geodetics, Inc. December 2016
 Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Sensor Fusion: Potential, Challenges and Applications Presented by KVH Industries and Geodetics, Inc. December 2016 1 KVH Industries Overview Innovative technology company 600 employees worldwide Focused
Airborne Laser Survey Systems: Technology and Applications
 Abstract Airborne Laser Survey Systems: Technology and Applications Guangping HE Lambda Tech International, Inc. 2323B Blue Mound RD., Waukesha, WI-53186, USA Email: he@lambdatech.com As mapping products
Abstract Airborne Laser Survey Systems: Technology and Applications Guangping HE Lambda Tech International, Inc. 2323B Blue Mound RD., Waukesha, WI-53186, USA Email: he@lambdatech.com As mapping products
AN INTEGRATED SENSOR ORIENTATION SYSTEM FOR AIRBORNE PHOTOGRAMMETRIC APPLICATIONS
 AN INTEGRATED SENSOR ORIENTATION SYSTEM FOR AIRBORNE PHOTOGRAMMETRIC APPLICATIONS M. J. Smith a, *, N. Kokkas a, D.W.G. Park b a Faculty of Engineering, The University of Nottingham, Innovation Park, Triumph
AN INTEGRATED SENSOR ORIENTATION SYSTEM FOR AIRBORNE PHOTOGRAMMETRIC APPLICATIONS M. J. Smith a, *, N. Kokkas a, D.W.G. Park b a Faculty of Engineering, The University of Nottingham, Innovation Park, Triumph
The Applanix Approach to GPS/INS Integration
 Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Lithopoulos 53 The Applanix Approach to GPS/INS Integration ERIK LITHOPOULOS, Markham ABSTRACT The Position and Orientation System for Direct Georeferencing (POS/DG) is an off-the-shelf integrated GPS/inertial
Integrated Multi-Source LiDAR and Imagery
 Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Figure 1: AirDaC aerial scanning system Integrated Multi-Source LiDAR and Imagery The derived benefits of LiDAR scanning in the fields of engineering, surveying, and planning are well documented. It has
Journal Online Jaringan COT POLIPD (JOJAPS) Accuracy Assessment of Height Coordinate Using Unmanned Aerial Vehicle Images Based On Leveling Height
 Accuracy Assessment of Height Coordinate Using Unmanned Aerial Vehicle Images Based On Leveling Height") JOJAPS eissn 2504-8457 Abstract Journal Online Jaringan COT POLIPD (JOJAPS) Accuracy Assessment of Height Coordinate Using Unmanned Aerial Vehicle Images Based On Leveling Height Syamsul Anuar Bin Abu
JOJAPS eissn 2504-8457 Abstract Journal Online Jaringan COT POLIPD (JOJAPS) Accuracy Assessment of Height Coordinate Using Unmanned Aerial Vehicle Images Based On Leveling Height Syamsul Anuar Bin Abu
Photogrammetric Performance of an Ultra Light Weight Swinglet UAV
 Photogrammetric Performance of an Ultra Light Weight Swinglet UAV J. Vallet, F. Panissod, C. Strecha, M. Tracol UAV-g 2011 - Unmanned Aerial Vehicle in Geomatics September 14-16, 2011ETH Zurich Summary
Photogrammetric Performance of an Ultra Light Weight Swinglet UAV J. Vallet, F. Panissod, C. Strecha, M. Tracol UAV-g 2011 - Unmanned Aerial Vehicle in Geomatics September 14-16, 2011ETH Zurich Summary
UAV Hyperspectral system for remote sensing application
 UAV Hyperspectral system for remote sensing application The system consists airborne imaging spectrophotometer placed on a frame suitable for use aircraft, a UAV helicopter and all components needed for
UAV Hyperspectral system for remote sensing application The system consists airborne imaging spectrophotometer placed on a frame suitable for use aircraft, a UAV helicopter and all components needed for
PHOTOGRAMMETRIC SOLUTIONS OF NON-STANDARD PHOTOGRAMMETRIC BLOCKS INTRODUCTION
 PHOTOGRAMMETRIC SOLUTIONS OF NON-STANDARD PHOTOGRAMMETRIC BLOCKS Dor Yalon Co-Founder & CTO Icaros, Inc. ABSTRACT The use of small and medium format sensors for traditional photogrammetry presents a number
PHOTOGRAMMETRIC SOLUTIONS OF NON-STANDARD PHOTOGRAMMETRIC BLOCKS Dor Yalon Co-Founder & CTO Icaros, Inc. ABSTRACT The use of small and medium format sensors for traditional photogrammetry presents a number
Trends in Digital Aerial Acquisition Systems
 Trends in Digital Aerial Acquisition Systems Ernest Yap Regional Sales Manager, Airborne-Americas eyap@applanix.com 1 Medium Format Digital Cameras Medium Format Digital Cameras Where does the Medium
Trends in Digital Aerial Acquisition Systems Ernest Yap Regional Sales Manager, Airborne-Americas eyap@applanix.com 1 Medium Format Digital Cameras Medium Format Digital Cameras Where does the Medium
SimActive and PhaseOne Workflow case study. By François Riendeau and Dr. Yuri Raizman Revision 1.0
 SimActive and PhaseOne Workflow case study By François Riendeau and Dr. Yuri Raizman Revision 1.0 Contents 1. Introduction... 2 1.1. Simactive... 2 1.2. PhaseOne Industrial... 2 2. Testing Procedure...
SimActive and PhaseOne Workflow case study By François Riendeau and Dr. Yuri Raizman Revision 1.0 Contents 1. Introduction... 2 1.1. Simactive... 2 1.2. PhaseOne Industrial... 2 2. Testing Procedure...
Multi-Band (Ku, C, Wideband - Satcom, Narrowband Satcom) Telemetry Test System for UAV Application
 Telemetry Test System for UAV Application") Multi-Band (Ku, C, Wideband - Satcom, Narrowband Satcom) Telemetry Test System for UAV Application Murat IMAY Turkish Aerospace Ind, Inc. Ankara, Turkey mimay@tai.com.tr, muratimay@gmail.com ABSTRACT "This
Multi-Band (Ku, C, Wideband - Satcom, Narrowband Satcom) Telemetry Test System for UAV Application Murat IMAY Turkish Aerospace Ind, Inc. Ankara, Turkey mimay@tai.com.tr, muratimay@gmail.com ABSTRACT "This
Merging LiDAR Data with Softcopy Photogrammetry Data
 Merging LiDAR Data with Softcopy Photogrammetry Data Cindy McCallum WisDOT\Bureau of Technical Services Surveying & Mapping Section Photogrammetry Unit Overview Terms and processes Why use data from LiDAR
Merging LiDAR Data with Softcopy Photogrammetry Data Cindy McCallum WisDOT\Bureau of Technical Services Surveying & Mapping Section Photogrammetry Unit Overview Terms and processes Why use data from LiDAR
THE RANGER-UAV FEATURES
 THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
THE RANGER-UAV The Ranger Series Ranger-UAV is designed for the most demanding mapping applications, no compromises made. With a 9 meter laser range, this system produces photorealistic 3D point clouds
Case Study for Long- Range Beyond Visual Line of Sight Project. March 15, 2018 RMEL Transmission and Planning Conference
 Case Study for Long- Range Beyond Visual Line of Sight Project March 15, 2018 RMEL Transmission and Planning Conference 2014 HDR Architecture, 2016 2014 HDR, Inc., all all rights reserved. Helicopters
Case Study for Long- Range Beyond Visual Line of Sight Project March 15, 2018 RMEL Transmission and Planning Conference 2014 HDR Architecture, 2016 2014 HDR, Inc., all all rights reserved. Helicopters
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
PROSILICA GigE Vision Kameras CCD und CMOS
 PROSILICA GigE Vision Kameras CCD und CMOS Case Study: GE4900C, GE4000C, GE1910C and GC2450C used in UAV-technology Prosilica Cameras Go Airborne Prosilica Kameras überzeugen mit hervorragender Bildqualität,
PROSILICA GigE Vision Kameras CCD und CMOS Case Study: GE4900C, GE4000C, GE1910C and GC2450C used in UAV-technology Prosilica Cameras Go Airborne Prosilica Kameras überzeugen mit hervorragender Bildqualität,
An Architecture for Seamless Integration of UAS-based Wildfire Monitoring Missions
 An Architecture for Seamless Integration of UAS-based Wildfire Monitoring Missions UNIVERSITAT POLITÈCNICA DE CATALUNYA ICARUS Research Group Cristina.Barrado@upc.edu April'08 Outline Presentation of ICARUS
An Architecture for Seamless Integration of UAS-based Wildfire Monitoring Missions UNIVERSITAT POLITÈCNICA DE CATALUNYA ICARUS Research Group Cristina.Barrado@upc.edu April'08 Outline Presentation of ICARUS
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA
 James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
James Van Rens CEO Riegl USA, Inc. Mining Industry and UAV s combined with LIDAR Commercial UAV Las Vegas October 2015 James Van Rens CEO Riegl USA COST EFFECIENCY CONTINUUM LIDAR and IMU Partnership Technology
Trimble GeoSpatial Products
 Expanding Solutions for Photogrammetric and Remote Sensing Professionals 55 th Photogrammetric Week in Stuttgart September 7 th 2015 Tobias Heuchel, Trimble Stuttgart, Germany Trimble GeoSpatial Products
Expanding Solutions for Photogrammetric and Remote Sensing Professionals 55 th Photogrammetric Week in Stuttgart September 7 th 2015 Tobias Heuchel, Trimble Stuttgart, Germany Trimble GeoSpatial Products
Chapter 1: Overview. Photogrammetry: Introduction & Applications Photogrammetric tools:
 Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Scalability for Large Photogrammetry Projects
 Scalability for Large Photogrammetry Projects Dr. Philippe Simard President SimActive Inc. IMAGE About SimActive Founded in 2003, SimActive is the developer of Correlator3D software, a patented end-to-end
Scalability for Large Photogrammetry Projects Dr. Philippe Simard President SimActive Inc. IMAGE About SimActive Founded in 2003, SimActive is the developer of Correlator3D software, a patented end-to-end
An Overview of Applanix.
 An Overview of Applanix The Company The Industry Leader in Developing Aided Inertial Technology Founded on Canadian Aerospace and Defense Industry Expertise Providing Precise Position and Orientation Systems
An Overview of Applanix The Company The Industry Leader in Developing Aided Inertial Technology Founded on Canadian Aerospace and Defense Industry Expertise Providing Precise Position and Orientation Systems
UAS for Surveyors. An emerging technology for the Geospatial Industry. Ian Murgatroyd : Technical Sales Rep. Trimble
 UAS for Surveyors An emerging technology for the Geospatial Industry Ian Murgatroyd : Technical Sales Rep. Trimble Project Overview Voyager Quarry, located near Perth Australia Typical of hard rock mines,
UAS for Surveyors An emerging technology for the Geospatial Industry Ian Murgatroyd : Technical Sales Rep. Trimble Project Overview Voyager Quarry, located near Perth Australia Typical of hard rock mines,
The raycloud A Vision Beyond the Point Cloud
 The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
The raycloud A Vision Beyond the Point Cloud Christoph STRECHA, Switzerland Key words: Photogrammetry, Aerial triangulation, Multi-view stereo, 3D vectorisation, Bundle Block Adjustment SUMMARY Measuring
3D recording of archaeological excavation
 5 th International Conference Remote Sensing in Archaeology The Age of Sensing 13-15 October 2014 - Duke University 3D recording of archaeological excavation Stefano Campana UNIVERSITY of CAMBRIDGE Faculty
5 th International Conference Remote Sensing in Archaeology The Age of Sensing 13-15 October 2014 - Duke University 3D recording of archaeological excavation Stefano Campana UNIVERSITY of CAMBRIDGE Faculty
MIDAS 5 Camera System. (Multi-camera Integrated Digital Acquisition System)
") MIDAS 5 Camera System (Multi-camera Integrated Digital Acquisition System) MIDAS 5 in Puppet Air STP-400 Mount The MIDAS Solution The MIDAS 5 system is a complete turn-key oblique Imaging solution for
MIDAS 5 Camera System (Multi-camera Integrated Digital Acquisition System) MIDAS 5 in Puppet Air STP-400 Mount The MIDAS Solution The MIDAS 5 system is a complete turn-key oblique Imaging solution for
INTEGRATING TERRESTRIAL LIDAR WITH POINT CLOUDS CREATED FROM UNMANNED AERIAL VEHICLE IMAGERY
 INTEGRATING TERRESTRIAL LIDAR WITH POINT CLOUDS CREATED FROM UNMANNED AERIAL VEHICLE IMAGERY Michael Leslar a * a Teledyne-Optech, 300 Interchange Way, Vaughan, Ontario, Canada, L4K 5Z8, Mike.Leslar@teledyneoptech.com
INTEGRATING TERRESTRIAL LIDAR WITH POINT CLOUDS CREATED FROM UNMANNED AERIAL VEHICLE IMAGERY Michael Leslar a * a Teledyne-Optech, 300 Interchange Way, Vaughan, Ontario, Canada, L4K 5Z8, Mike.Leslar@teledyneoptech.com
UAV PROJECT - BUILDING A REALITY-BASED 3D MODEL OF THE NUS (NATIONAL UNIVERSITY OF SINGAPORE) CAMPUS
 CAMPUS") UAV PROJECT - BUILDING A REALITY-BASED 3D MODEL OF THE NUS (NATIONAL UNIVERSITY OF SINGAPORE) CAMPUS Rongjun QIN a, Prof. em. Dr. Armin GRUEN b, Dr. Xianfeng HUANG c a PHD student of ETH, Singapore ETH
UAV PROJECT - BUILDING A REALITY-BASED 3D MODEL OF THE NUS (NATIONAL UNIVERSITY OF SINGAPORE) CAMPUS Rongjun QIN a, Prof. em. Dr. Armin GRUEN b, Dr. Xianfeng HUANG c a PHD student of ETH, Singapore ETH
Chapters 1 7: Overview
 Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Leica Systems Overview
 RC30 AERIAL CAMERA SYSTEM Leica Systems Overview The Leica RC30 aerial film camera is the culmination of decades of development, started with Wild's first aerial camera in the 1920s. Beautifully engineered
RC30 AERIAL CAMERA SYSTEM Leica Systems Overview The Leica RC30 aerial film camera is the culmination of decades of development, started with Wild's first aerial camera in the 1920s. Beautifully engineered
FOUR-BAND THERMAL MOSAICKING: A NEW METHOD TO PROCESS THERMAL IMAGERY FROM UAV FLIGHT YICHEN YANG YALE SCHOOL OF FORESTRY AND ENVIRONMENTAL STUDIES
 FOUR-BAND THERMAL MOSAICKING: A NEW METHOD TO PROCESS THERMAL IMAGERY FROM UAV FLIGHT YICHEN YANG YALE SCHOOL OF FORESTRY AND ENVIRONMENTAL STUDIES OUTLINE Background Objectives Methodology Results Calibration
FOUR-BAND THERMAL MOSAICKING: A NEW METHOD TO PROCESS THERMAL IMAGERY FROM UAV FLIGHT YICHEN YANG YALE SCHOOL OF FORESTRY AND ENVIRONMENTAL STUDIES OUTLINE Background Objectives Methodology Results Calibration
Rectification Algorithm for Linear Pushbroom Image of UAV
 Ruoming SHI and Ling ZHU, China Key words: Rectification, Linear Pushbroom, GCP, UAV. 2 SUMMARY This research presents a method of rectification for the image flow acquired by UAV. The sensor on the UAV
Ruoming SHI and Ling ZHU, China Key words: Rectification, Linear Pushbroom, GCP, UAV. 2 SUMMARY This research presents a method of rectification for the image flow acquired by UAV. The sensor on the UAV
Accuracy Assessment of an ebee UAS Survey
 Accuracy Assessment of an ebee UAS Survey McCain McMurray, Remote Sensing Specialist mmcmurray@newfields.com July 2014 Accuracy Assessment of an ebee UAS Survey McCain McMurray Abstract The ebee unmanned
Accuracy Assessment of an ebee UAS Survey McCain McMurray, Remote Sensing Specialist mmcmurray@newfields.com July 2014 Accuracy Assessment of an ebee UAS Survey McCain McMurray Abstract The ebee unmanned
P h a s e O n e i X U - RS A c c u r a c y A n a l y s i s. T h e f o r e f r o n t o f a e r i a l p h o t o g r a p h y
 P h a s e O n e i X U - RS1 0 0 0 A c c u r a c y A n a l y s i s T h e f o r e f r o n t o f a e r i a l p h o t o g r a p h y 1 Phase One Industrial Aerial Survey Products ixu-rs1000, ixu1000 series
P h a s e O n e i X U - RS1 0 0 0 A c c u r a c y A n a l y s i s T h e f o r e f r o n t o f a e r i a l p h o t o g r a p h y 1 Phase One Industrial Aerial Survey Products ixu-rs1000, ixu1000 series
Perspective Sensing for Inertial Stabilization
 Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
Perspective Sensing for Inertial Stabilization Dr. Bernard A. Schnaufer Jeremy Nadke Advanced Technology Center Rockwell Collins, Inc. Cedar Rapids, IA Agenda Rockwell Collins & the Advanced Technology
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
DENSE 3D POINT CLOUD GENERATION FROM UAV IMAGES FROM IMAGE MATCHING AND GLOBAL OPTIMAZATION
 DENSE 3D POINT CLOUD GENERATION FROM UAV IMAGES FROM IMAGE MATCHING AND GLOBAL OPTIMAZATION S. Rhee a, T. Kim b * a 3DLabs Co. Ltd., 100 Inharo, Namgu, Incheon, Korea ahmkun@3dlabs.co.kr b Dept. of Geoinformatic
DENSE 3D POINT CLOUD GENERATION FROM UAV IMAGES FROM IMAGE MATCHING AND GLOBAL OPTIMAZATION S. Rhee a, T. Kim b * a 3DLabs Co. Ltd., 100 Inharo, Namgu, Incheon, Korea ahmkun@3dlabs.co.kr b Dept. of Geoinformatic
GIS Data Collection. This chapter reviews the main methods of GIS data capture and transfer and introduces key practical management issues.
 9 GIS Data Collection OVERVIEW This chapter reviews the main methods of GIS data capture and transfer and introduces key practical management issues. It distinguishes between primary (direct measurement)
9 GIS Data Collection OVERVIEW This chapter reviews the main methods of GIS data capture and transfer and introduces key practical management issues. It distinguishes between primary (direct measurement)
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery
 Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
Personal Navigation and Indoor Mapping: Performance Characterization of Kinect Sensor-based Trajectory Recovery 1 Charles TOTH, 1 Dorota BRZEZINSKA, USA 2 Allison KEALY, Australia, 3 Guenther RETSCHER,
UCSD AUVSI Unmanned Aerial System Team. Joshua Egbert Shane Grant
 UCSD AUVSI Unmanned Aerial System Team Joshua Egbert Shane Grant Agenda Project background and history System design overview Gimbal Stabilization Target Recognition Lessons Learned Future Work Q&A UCSD
UCSD AUVSI Unmanned Aerial System Team Joshua Egbert Shane Grant Agenda Project background and history System design overview Gimbal Stabilization Target Recognition Lessons Learned Future Work Q&A UCSD
REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017
 REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017 SERVICES Visual Inspections Digital Terrain Models Aerial Imagery Volume Computations Thermal Inspections Photo maps Aerial Video Training & Consultancy
REMOTE SENSING LiDAR & PHOTOGRAMMETRY 19 May 2017 SERVICES Visual Inspections Digital Terrain Models Aerial Imagery Volume Computations Thermal Inspections Photo maps Aerial Video Training & Consultancy
Digital Photogrammetric System. Version 5.3 USER GUIDE. Processing of UAV data
 Digital Photogrammetric System Version 5.3 USER GUIDE Table of Contents 1. Workflow of UAV data processing in the system... 3 2. Create project... 3 3. Block forming... 5 4. Interior orientation... 6 5.
Digital Photogrammetric System Version 5.3 USER GUIDE Table of Contents 1. Workflow of UAV data processing in the system... 3 2. Create project... 3 3. Block forming... 5 4. Interior orientation... 6 5.
Sasanka Madawalagama Geoinformatics Center Asian Institute of Technology Thailand
 Sasanka Madawalagama Geoinformatics Center Asian Institute of Technology Thailand This learning material was not prepared by ADB. The views expressed in this document are the views of the author/s and
Sasanka Madawalagama Geoinformatics Center Asian Institute of Technology Thailand This learning material was not prepared by ADB. The views expressed in this document are the views of the author/s and
MONO-IMAGE INTERSECTION FOR ORTHOIMAGE REVISION
 MONO-IMAGE INTERSECTION FOR ORTHOIMAGE REVISION Mohamed Ibrahim Zahran Associate Professor of Surveying and Photogrammetry Faculty of Engineering at Shoubra, Benha University ABSTRACT This research addresses
MONO-IMAGE INTERSECTION FOR ORTHOIMAGE REVISION Mohamed Ibrahim Zahran Associate Professor of Surveying and Photogrammetry Faculty of Engineering at Shoubra, Benha University ABSTRACT This research addresses
Extracting Elevation from Air Photos
 Extracting Elevation from Air Photos TUTORIAL A digital elevation model (DEM) is a digital raster surface representing the elevations of a terrain for all spatial ground positions in the image. Traditionally
Extracting Elevation from Air Photos TUTORIAL A digital elevation model (DEM) is a digital raster surface representing the elevations of a terrain for all spatial ground positions in the image. Traditionally
A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS
 A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS Dr Steve Harwin, UAV Operations, Tas KEY QUESTIONS What detail, scale and accuracy are needed? For change analysis the data
A COMPARISON OF STANDARD FIXED-WING VS MULTIROTOR DRONE PHOTOGRAMMETRY SURVEYS Dr Steve Harwin, UAV Operations, Tas KEY QUESTIONS What detail, scale and accuracy are needed? For change analysis the data
Efficient Processing of UAV Projects
 Efficient Processing of UAV Projects Dr. Philippe Simard President SimActive Inc. IMAGE About SimActive Leading developer of photogrammetry software since 2003 Thousands of users in 50+ countries: military
Efficient Processing of UAV Projects Dr. Philippe Simard President SimActive Inc. IMAGE About SimActive Leading developer of photogrammetry software since 2003 Thousands of users in 50+ countries: military
Coastal Survey of archaeological sites using drones
 Coastal Survey of archaeological sites using drones In Poseidon s Realm XXI Underwater archaeology - interdisciplinary approaches and technical innovations Dimitrios Skarlatos, Savvidou Eleni Photogrammetric
Coastal Survey of archaeological sites using drones In Poseidon s Realm XXI Underwater archaeology - interdisciplinary approaches and technical innovations Dimitrios Skarlatos, Savvidou Eleni Photogrammetric
Airborne Hyperspectral Imaging Using the CASI1500
 Airborne Hyperspectral Imaging Using the CASI1500 AGRISAR/EAGLE 2006, ITRES Research CASI 1500 overview A class leading VNIR sensor with extremely sharp optics. 380 to 1050nm range 288 spectral bands ~1500
Airborne Hyperspectral Imaging Using the CASI1500 AGRISAR/EAGLE 2006, ITRES Research CASI 1500 overview A class leading VNIR sensor with extremely sharp optics. 380 to 1050nm range 288 spectral bands ~1500
Generating highly accurate 3D data using a sensefly exom drone
 Generating highly accurate 3D data using a sensefly exom drone C. Álvarez 1, A. Roze 2, A. Halter 3, L. Garcia 4 1 Geomatic Engineer, Lehmann Géomètre SA 2 Application Engineer, sensefly SA 3 Geomatic
Generating highly accurate 3D data using a sensefly exom drone C. Álvarez 1, A. Roze 2, A. Halter 3, L. Garcia 4 1 Geomatic Engineer, Lehmann Géomètre SA 2 Application Engineer, sensefly SA 3 Geomatic
A UAV MULTI-SENSOR RAPID MAPPING SYSTEM FOR DISASTER MANAGEMENT
 A UAV MULTI-SENSOR RAPID MAPPING SYSTEM FOR DISASTER MANAGEMENT Kyoungah Choi a, Jihun Lee a, Impyeong Lee a, * a Dept. of Geoinformatics, The University of Seoul, 90 Jeonnong-dong, Dongdaemun-gu, Seoul,
A UAV MULTI-SENSOR RAPID MAPPING SYSTEM FOR DISASTER MANAGEMENT Kyoungah Choi a, Jihun Lee a, Impyeong Lee a, * a Dept. of Geoinformatics, The University of Seoul, 90 Jeonnong-dong, Dongdaemun-gu, Seoul,
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation
 Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
Precision Roadway Feature Mapping Jay A. Farrell, University of California-Riverside James A. Arnold, Department of Transportation February 26, 2013 ESRA Fed. GIS Outline: Big picture: Positioning and
UNMANNED AERIAL VEHICLE IN CADASTRAL APPLICATIONS
 UNMANNED AERIAL VEHICLE IN CADASTRAL APPLICATIONS M. Manyoky a, P. Theiler a, D. Steudler b, H. Eisenbeiss a * a Institute of Geodesy and Photogrammetry, ETH Zurich, 8093 Zurich, Switzerland - (henri.eisenbeiss,
UNMANNED AERIAL VEHICLE IN CADASTRAL APPLICATIONS M. Manyoky a, P. Theiler a, D. Steudler b, H. Eisenbeiss a * a Institute of Geodesy and Photogrammetry, ETH Zurich, 8093 Zurich, Switzerland - (henri.eisenbeiss,
UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES. 8 th April 2010 Phang Swee King
 UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES 8 th April 2010 Phang Swee King OUTLINES Introduction Platform Design Helicopter Avionics System Ground Station Sensors Measurement
UNIVERSAL CONTROL METHODOLOGY DESIGN AND IMPLEMENTATION FOR UNMANNED VEHICLES 8 th April 2010 Phang Swee King OUTLINES Introduction Platform Design Helicopter Avionics System Ground Station Sensors Measurement
MAPPING WITHOUT GROUND CONTROL POINTS: DOES IT WORK?
 MAPPING WITHOUT GROUND CONTROL POINTS: DOES IT WORK? BACKGROUND The economic advantages of Structure from Motion (SfM) mapping without any ground control points have motivated us to investigate an approach
MAPPING WITHOUT GROUND CONTROL POINTS: DOES IT WORK? BACKGROUND The economic advantages of Structure from Motion (SfM) mapping without any ground control points have motivated us to investigate an approach
PREPARATIONS FOR THE ON-ORBIT GEOMETRIC CALIBRATION OF THE ORBVIEW 3 AND 4 SATELLITES
 PREPARATIONS FOR THE ON-ORBIT GEOMETRIC CALIBRATION OF THE ORBVIEW 3 AND 4 SATELLITES David Mulawa, Ph.D. ORBIMAGE mulawa.david@orbimage.com KEY WORDS: Geometric, Camera, Calibration, and Satellite ABSTRACT
PREPARATIONS FOR THE ON-ORBIT GEOMETRIC CALIBRATION OF THE ORBVIEW 3 AND 4 SATELLITES David Mulawa, Ph.D. ORBIMAGE mulawa.david@orbimage.com KEY WORDS: Geometric, Camera, Calibration, and Satellite ABSTRACT
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
APPENDIX E2. Vernal Pool Watershed Mapping
 APPENDIX E2 Vernal Pool Watershed Mapping MEMORANDUM To: U.S. Fish and Wildlife Service From: Tyler Friesen, Dudek Subject: SSHCP Vernal Pool Watershed Analysis Using LIDAR Data Date: February 6, 2014
APPENDIX E2 Vernal Pool Watershed Mapping MEMORANDUM To: U.S. Fish and Wildlife Service From: Tyler Friesen, Dudek Subject: SSHCP Vernal Pool Watershed Analysis Using LIDAR Data Date: February 6, 2014
SYSTEM DYNAMICS / ZACHMAN FRAMEWORK CHARACTERIZATION UAV T&E
 SYSTEM DYNAMICS / ZACHMAN FRAMEWORK CHARACTERIZATION OF UAV T&E Bharath Dantu IMSE: Industrial, Manufacturing and Systems Engineering Eric Smith RIMES: Research Institute for Manufacturing and Engineering
SYSTEM DYNAMICS / ZACHMAN FRAMEWORK CHARACTERIZATION OF UAV T&E Bharath Dantu IMSE: Industrial, Manufacturing and Systems Engineering Eric Smith RIMES: Research Institute for Manufacturing and Engineering
ON FUNDAMENTAL EVALUATION USING UAV IMAGERY AND 3D MODELING SOFTWARE
 ON FUNDAMENTAL EVALUATION USING UAV IMAGERY AND 3D MODELING SOFTWARE K. Nakano a, d *, H. Suzuki b, T. Tamino c, H. Chikatsu d a Geospatial laboratory, Product Planning Department, AERO ASAHI CORPORATION,
ON FUNDAMENTAL EVALUATION USING UAV IMAGERY AND 3D MODELING SOFTWARE K. Nakano a, d *, H. Suzuki b, T. Tamino c, H. Chikatsu d a Geospatial laboratory, Product Planning Department, AERO ASAHI CORPORATION,
LIDAR MAPPING FACT SHEET
 1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
USING UNMANNED AERIAL VEHICLE (DRONE/FLYCAM) TECHNOLOGY IN SURVEY WORK OF PORTCOAST
 TECHNOLOGY IN SURVEY WORK OF PORTCOAST") USING UNMANNED AERIAL VEHICLE (DRONE/FLYCAM) TECHNOLOGY IN SURVEY WORK OF PORTCOAST 1. Capturing aerial images by using Drone Taking images by drones is currently applied in many fields especially in topographic
USING UNMANNED AERIAL VEHICLE (DRONE/FLYCAM) TECHNOLOGY IN SURVEY WORK OF PORTCOAST 1. Capturing aerial images by using Drone Taking images by drones is currently applied in many fields especially in topographic
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
2/9/2016. Session Agenda: Implementing new Geospatial Technologies for more efficient data capture
 Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Implementing new Geospatial Technologies for more efficient data capture Jay Haskamp Applied Geospatial Engineer Steve Richter VP Sales Session Agenda: Today s changing technologies and what lies ahead
Absolute Horizontal Accuracies of Pictometry s Individual Orthogonal Frame Imagery
 A Pictometry International, Corp White Paper Absolute Horizontal Accuracies of Pictometry s Individual Orthogonal Frame Imagery Michael J. Zoltek VP, Surveying & Mapping Pictometry International, Corp
A Pictometry International, Corp White Paper Absolute Horizontal Accuracies of Pictometry s Individual Orthogonal Frame Imagery Michael J. Zoltek VP, Surveying & Mapping Pictometry International, Corp
Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System
 Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System by Xiang Luo A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information
Real Time Multi-Sensor Data Acquisition and Processing for a Road Mapping System by Xiang Luo A thesis submitted for the degree of Master of Engineering (Research) Faculty of Engineering and Information
High Resolution Laserscanning, not only for 3D-City Models
 Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
Lohr 133 High Resolution Laserscanning, not only for 3D-City Models UWE LOHR, Ravensburg ABSTRACT The TopoSys laserscanner system is designed to produce digital elevation models (DEMs) of the environment
Photo based Terrain Data Acquisition & 3D Modeling
 Photo based Terrain Data Acquisition & 3D Modeling June 7, 2013 Howard Hahn Kansas State University Partial funding by: KSU Office of Research and Sponsored Programs Introduction: Need Application 1 Monitoring
Photo based Terrain Data Acquisition & 3D Modeling June 7, 2013 Howard Hahn Kansas State University Partial funding by: KSU Office of Research and Sponsored Programs Introduction: Need Application 1 Monitoring
Geomatica OrthoEngine Orthorectifying VEXCEL UltraCam Data
 Geomatica OrthoEngine Orthorectifying VEXCEL UltraCam Data Vexcel s UltraCam digital camera system has a focal distance of approximately 100mm and offers a base panchromatic (black and white) resolution
Geomatica OrthoEngine Orthorectifying VEXCEL UltraCam Data Vexcel s UltraCam digital camera system has a focal distance of approximately 100mm and offers a base panchromatic (black and white) resolution
Phase One ixa-r-180 Aerial Triangulation
 Phase One ixa-r-180 Aerial Triangulation Accuracy Assessment Results Revision 1 Oodi Menaker and Stephen Epstein Table of Contents 1. Introduction... 1 2. Method... 1 2.1. Selection of Test Area... 2 2.2.
Phase One ixa-r-180 Aerial Triangulation Accuracy Assessment Results Revision 1 Oodi Menaker and Stephen Epstein Table of Contents 1. Introduction... 1 2. Method... 1 2.1. Selection of Test Area... 2 2.2.
Telecommunications Engineering Thesis
 Telecommunications Engineering Thesis Validating a Structure from Motion Tool for use on Videos recorded from an Unmanned Aerial Vehicle (UAV) David Núñez Clemente david.nunez.clemente@gmail.com Universidad
Telecommunications Engineering Thesis Validating a Structure from Motion Tool for use on Videos recorded from an Unmanned Aerial Vehicle (UAV) David Núñez Clemente david.nunez.clemente@gmail.com Universidad
UAV-Borne 3-D Mapping System by Multisensor Integration
 IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 47, NO. 3, MARCH 2009 701 UAV-Borne 3-D Mapping System by Multisensor Integration Masahiko Nagai, Tianen Chen, Ryosuke Shibasaki, Hideo Kumagai,
IEEE TRANSACTIONS ON GEOSCIENCE AND REMOTE SENSING, VOL. 47, NO. 3, MARCH 2009 701 UAV-Borne 3-D Mapping System by Multisensor Integration Masahiko Nagai, Tianen Chen, Ryosuke Shibasaki, Hideo Kumagai,
Four Mainstream Reality Capture Tools* Optical GNSS (or more commonly GPS) Lidar. Photogrammetry 12/20/2015. Static Mobile Aerial
 Lidar. Photogrammetry 12/20/2015. Static Mobile Aerial") Four Mainstream Reality Capture Tools* Optical GNSS (or more commonly GPS) Lidar Static Mobile Aerial Photogrammetry UAV Collected Ground Collected 1 Optical Consists of three measurement devices H Angle,
Four Mainstream Reality Capture Tools* Optical GNSS (or more commonly GPS) Lidar Static Mobile Aerial Photogrammetry UAV Collected Ground Collected 1 Optical Consists of three measurement devices H Angle,
FUSION OF MULTI-VIEW AND MULTI-SCALE AERIAL IMAGERY FOR REAL-TIME SITUATION AWARENESS APPLICATIONS
 FUSION OF MULTI-VIEW AND MULTI-SCALE AERIAL IMAGERY FOR REAL-TIME SITUATION AWARENESS APPLICATIONS X. Zhuo, F. Kurz, P. Reinartz German Aerospace Centre, 82234 Wessling, Germany - (xiangyu.zhuo, franz.kurz,
FUSION OF MULTI-VIEW AND MULTI-SCALE AERIAL IMAGERY FOR REAL-TIME SITUATION AWARENESS APPLICATIONS X. Zhuo, F. Kurz, P. Reinartz German Aerospace Centre, 82234 Wessling, Germany - (xiangyu.zhuo, franz.kurz,