RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation
|
|
|
- Melvyn Gallagher
- 5 years ago
- Views:
Transcription
1 RDFNet: RGB-D Multi-level Residual Feature Fusion for Indoor Semantic Segmentation Seong-Jin Park POSTECH Ki-Sang Hong POSTECH Seungyong Lee POSTECH Abstract In multi-class indoor semantic segmentation using RGB- D data, it has been shown that incorporating depth feature into RGB feature is helpful to improve segmentation accuracy. However, previous studies have not fully exploited the potentials of multi-modal feature fusion, e.g., simply concatenating RGB and depth features or averaging RGB and depth score maps. To learn the optimal fusion of multimodal features, this paper presents a novel network that extends the core idea of residual learning to RGB-D semantic segmentation. Our network effectively captures multilevel RGB-D CNN features by including multi-modal feature fusion blocks and multi-level feature refinement blocks. Feature fusion blocks learn residual RGB and depth features and their combinations to fully exploit the complementary characteristics of RGB and depth data. Feature refinement blocks learn the combination of fused features from multiple levels to enable high-resolution prediction. Our network can efficiently train discriminative multi-level features from each modality end-to-end by taking full advantage of skip-connections. Our comprehensive experiments demonstrate that the proposed architecture achieves the state-of-the-art accuracy on two challenging RGB-D indoor datasets, NYUDv2 and SUN RGB-D. 1. Introduction Semantic segmentation that assigns all pixels into different semantic classes is a fundamental task for visual scene understanding. In the past, there was broad research for semantic segmentation based on conditional random field (CRF) using conventional hand-crafted visual features [34, 23, 41]. Recently, deep convolutional neural networks (DCNNs) have achieved great success in image classification task [22, 43, 36, 14]. Built on the success of image recognition using DCNNs, many semantic segmentation methods have also adopted DCNNs by extending them to fully convolutional pixel-wise classification [30, 4, 42]. Figure 1. Diagram of the proposed RDFNet for RGB-D semantic segmentation. The network fistly fuses multi-modal features through a block called MMFNet and refines the fused features through a series of RefineNet blocks. Subsequent research [45, 29, 1, 3, 28] that incorporates the CRF framework into DCNN further improved the accuracy. However, indoor semantic segmentation is still one of the most challenging problem due to complex and various object configurations with severe occlusions. With the availability of commercial RGB-D sensors such as Microsoft Kinect [44], it has been consistently proved that utilizing features extracted from depth information is useful to reduce the uncertainty for recognizing objects [32, 10, 20, 35, 6, 5, 11, 7, 25, 39, 13]. Depth features can describe 3D geometric information which might be missed in RGB-only features. To extract useful features from both RGB and depth data, it is crucial to develop an effective method for fusing two modalities. There have been many 4980
2 attempts to utilize the depth information for semantic segmentation in different ways. Previously most methods [32, 10, 20, 35, 6] designed hand-crafted depth features and constructed various models to classify each region or pixel. In contrast, recent approaches [5, 11, 7, 25, 39, 13] employ DCNNs which successfully learn informative RGB features from low level primitives for high level semantics. As the main issue of RGB-D semantic segmentation is how to effectively extract and fuse depth features along with color features, various approaches have been proposed to exploit the ability of DCNN for integrating depth information. The approaches include concatenating input RGB and D channels, fusing score maps computed from each modality, extracting common and specific features for different modalities, and so on. Although previous approaches achieved meaningful results, there has been a lack of research that fully utilizes recent successful CNN architectures using skip-connections. In the case of RGB semantic segmentation, Lin et al. [26] has recently achieved great success in utilizing multi-level RGB features with different resolutions by iteratively fusing and refining them. They designed a network called RefineNet by taking advantage of residual learning with skipconnection [14, 15] that enables effortless backpropagation of gradients during training. The multi-level features in RefineNet are connected through the short and long-range residual connections and thus can be efficiently trained and merged into a high-resolution feature map. Inspired by the work, we present a novel RGB-D fusion network (RDFNet) that extends the core idea of residual learning to RGB-D semantic segmentation. We extend the RefineNet to effectively extract and fuse RGB and depth features through residual feature fusion. Our network consists of two feature fusion blocks: multi-modal feature fusion (MMF) block and multi-level feature refinement (Refine) block (Figure 1). The MMF block is crucial to exploit different modality of RGB and depth features. The block is constructed by mimicking the RefineNet block but with different inputs; The inputs are multi-level RGB and depth features computed from deep residual network [14]. Then, it fuses the different modality features through residual convolutional units and feature adaptation convolution, followed by optional residual pooling. The MMF block adaptively trains residual feature to effectively fuse the complementary features in different modalities, while learning the relative importance of each modality feature. The block is subsequently followed by the Refine block to further process the fused features for high-resolution semantic segmentation. In this architecture, discriminative multilevel RGB and depth features can be effectively trained and fused, while retaining the key advantage of the skip connection, i.e., all the gradients effectively flow backwards through residual connections to the ResNet input features. Our main contributions can be summarized as follows: 1. We propose a network that effectively extracts and fuses multi-level RGB-D features in very deep network by extending the core idea of residual learning to RGB- D semantic segmentation. 2. Our multi-modal feature fusion block enables efficient end-to-end training of discriminative RGB-D features on a single GPU by taking full advantage of residual learning with skip-connection. 3. We show that our network for RGB-D semantic segmentation outperforms existing methods and achieves the state-of-the-art performance on two public RGB-D datasets, NYUDv2 and SUN RGB-D. 2. Related Work Since great advance in image classification task using DCNN [22, 43, 36, 14], most recent semantic segmentation methods have employed DCNN. Long et al. [30] proposed a fully convolutional network (FCN) that extended DCNN image classification to dense pixel-wise classification by convolutionalization. The main limitation of the FCN-based methods is lowresolution prediction due to multiple pooling operations. To resolve the limitation, there have been various approaches. One approach [42, 4] employed astrous convolution, also known as dilated convolution, which supports exponential expansion of the receptive field without loss of resolution. Chen et al. [4] additionally applied dense CRF method [21] to achieve detailed final prediction. Several followup studies [45, 29, 1, 3, 28] proposed sophisticated methods to combine CRF framework into DCNNs. Another approach [31, 2, 19] learned multiple deconvolution layers from low-resolution features to upsample the coarse feature map while recovering detailed boundaries. The other approach [30, 12, 2, 33, 17, 26] exploited middle layer features to achieve high-resolution prediction. Long et al. [30] designed a skip architecture and merged score maps computed from multi-level features to obtain the final prediction. Hariharan et al. [12] constructed a feature vector called hypercolumn for every location by stacking features from some or all of the layers in the network. Several methods [2, 33, 17] applied skip-connections in feature upsampling procedures using deconvolution. In particular, Lin et al. [26] very recently achieved large improvement by designing a network called RefineNet that iteratively refines higher-level features by employing low-level features through residual connections. The network effectively conveys the low-level features as well as semantic high-level features and it can be efficiently trained end-toend. Our RGB-D network revises this state-of-the-art architecture and takes the same advantage. 4981
3 (a) (b) (c) (d) Figure 2. Different existing architectures for RGB-D semantic segmentation. (a) early fusion, (b) late fusion, (c) the architecture proposed by [39], (d) the architecture proposed by [13], where C, T, and + represent the concatenation, transformation, and element-wise summation, respectively. For indoor semantic segmentation, a variety of methods utilizing depth information have been studied. Previously, most methods [32, 10, 20, 35, 6] computed hand-crafted features specifically designed for capturing depth features as well as color features. Then, they constructed a model to classify each region such as superpixel based on the features. In contrast, recent methods [5, 11, 7, 25, 39, 13] usually employ DCNN that automatically trains features capturing different levels of representations. Couprie et al. [5] extended multi-scale RGB CNN architecture [8] to RGB- D situation by simply concatenating input color and depth channels, i.e., early fusion (Figure 2 (a)). Long et al. [30] additionally reported the result of fusing two predictions made by each RGB and depth modality, i.e., late fusion (Figure 2 (b)), as well as the result of early fusion. Gupta et al. [11] generalized the R-CNN system introduced by Girshick et al. [9] to leverage depth information. For that purpose, they encoded the depth image with three channels called HHA at each pixel: horizontal disparity, height above ground, and angle with gravity. Li et al. [25] captured and fused contextual information from RGB and depth features through bi-directional vertical and horizontal LSTM layers [38]. They used rather simple architecture especially for depth feature and partly utilized only RGB intermediate features through simple feature concatenation. There have been encoder-decoder architectures [39, 13] similarly to RGB deconvolution-based methods. Wang et al. [39] proposed a structure for deconvolution of multiple modalities (Figure 2 (c)). It contains additional feature transformation network that correlates the two modalities by discovering common and modality specific features. It does not exploit any informative intermediate features of both modalities and it adopts simple score fusion of two modalities at the end of the network for final prediction. The training procedures consist of two stages rather than end-to-end. Hazirbas et al. [13] proposed a method that exploits intermediate depth features (Figure 2 (d)). However, as they simply sum intermediate RGB and depth features only in encoder part, it does not fully exploit effective midlevel RGB-D features, reporting accuracy worse than the state-of-the-art RGB-only CNN architecture [27]. In this paper, we propose a network that effectively exploits multi-level RGB and depth features simultaneously. Our network is trained to obtain optimal fusion of two complementary modality features through residual learning with skip-connection and iteratively refines the fused features. The multi-path residual feature fusion with skip-connection allows the backward gradient to easily propagate to both RGB and depth layers. In this way, the network trains endto-end the discriminative RGB-D features which should be fused from low to high level. 3. Multi-level Residual Feature Fusion Utilizing multi-level features is important for high resolution dense prediction. Existing RGB-D semantic segmentation approaches do not effectively extract or fuse those features in the two modalities. We propose a network that exploits multi-level RGB-D features and effectively fuses the features in different modalities through residual learning with skip-connections. 4982
4 CNN CNN CNN CNN Refine Net-1 Refine Net-2 Refine Net-3 Refine Net-4 Figure 3. Building blocks of the network proposed by [26]. Left: network architecture for semantic segmentation. Right: detailed diagram of RefineNet block. Figure 4. Details of the sub-modules in RefineNet. In this section, we first review the recently proposed RefineNet architecture [26] that achieved great success in RGB semantic segmentation by employing residual connections. Then, we describe our network that extends the RefineNet to effectively train the way to extract and fuse multi-level RGB and depth features for indoor semantic segmentation Review of RefineNet Recently ResNet [14, 15] has shown outstanding performance on image recognition. The simplest way to employ the ResNet to semantic segmentation is replacing the single label prediction layer with a dense prediction layer. However, it outputs prediction with 32 times smaller in each spatial dimension than the original image. To address the limitation, RefineNet iteratively refines higher-level features by incorporating low-level features through sub-building blocks, called RefineNet (Figure 3). The RefineNet takes as inputs each multi-level ResNet feature through skip connection and the previously refined feature. Then, those features are refined and fused through a series of sub-components: residual convolutional unit, multi-resolution fusion, and chained residual pooling (Figure 4); The residual convolution unit (RCU) is an adaptive convolution set that fine-tunes the pretrained ResNet weights for semantic segmentation. The multiresolution fusion block fuses the multi-path input into a higher-resolution feature map. One convolution in the block is for input adaptation, which matches the number of feature channels and re-scales the feature values appropriately for summation. The purpose of chained residual pooling (CRP) is to encode contextual information from a large region. The block consists of a chain of multiple pooling blocks, each consisting of one max-pooling layer and one convolution layer. The pooling operation has an effect that spreads the large activation values which can be accessed from nearby locations as contextual features. The additional convolution layer learns the importance of the pooled feature, which is fused to the original feature through residual connection. There is an additional RCU at the end of the RefineNet to employ non-linearity operations on the fused feature maps. The core design philosophy of the RefineNet is motivated by the advantage of identity mapping with skipconnection [15]. The residual connections enable efficient backward propagation of gradients through RefineNet and facilitates end-to-end training of the multi-path network Our RDFNet with Multi Modal Feature Fusion The main issue of RGB-D semantic segmentation is how to effectively extract depth features along with color features and to utilize those features for the desired task of semantic segmentation. The RefineNet described in Section 3.1 proposed a generic means for fusing different levels of 4983
5 Figure 5. Diagram of our multi-modal feature fusion (MMF) network. features, which is more effective than simple feature concatenation. In this paper, we employ a similar architecture for multi-modal CNN feature fusion while retaining the advantage of skip connection. Our RDFNet extends the RefineNet to handle multimodal feature fusion and includes RefineNet blocks for fused feature refinement. The overall diagram of our network is illustrated in Figure 1. Differently from existing networks that utilize depth information (Figure 2), our network is designed to fully exploit multi-level depth features through MMF blocks with an additional deep depth feature path based on ResNet [14]. The detailed components of our MMFNet is shown in Figure 5. Our feature fusion block consists of the same components as in RefineNet but with different inputs, from which desired operations are slightly different. Given RGB and depth ResNet features, our MMFNet first reduces the dimension of each feature through one convolution to facilitate efficient training while mitigating explosion of parameters. Then, each feature goes through two RCUs and one convolution as in RefineNet. There is a certain difference between the purpose of RCUs in MMFNet and those in RefineNet. The RCUs in our MMFNet are desired to perform some nonlinear transformations specifically for modality fusion. Two features in different modalities are complementarily combined to improve each other through the operations, where as those in RefineNet are mainly to refine coarse higher level feature by employing lower level feature with higher-resolution. Subsequent additional convolution in MMFNet is crucial to adaptively fuse features in different modalities as well as re-scaling the feature values appropriately for summation. As color features generally have better discrimination power than depth features for semantic segmentation, the summation fusion in the block mainly works to learn supplementary or residual depth features which might improve RGB features to discriminate confusing patterns. The importance of each modality feature can be controlled by the learnable parameters in the convolution after RCUs. Finally, we perform an additional residual pooling operation to incorporate certain contextual information in the fused feature. We found one residual pooling in MMFNet of each level is enough. The stronger contextual information can be further incorporated in the following multi-level fusion through RefineNet blocks. Note that we skip the additional RCU at the end of original RefineNet in our MMFNet because the output of our MMFNet directly goes through the RCUs in the fore part of the RefineNet. Our network is constructed to retain the philosophy of the RefineNet by employing residual learning with skipconnections through all the layers, which facilitates both of effective multi-level RGB and depth feature extraction and efficient end-to-end training Architecture details Following the success of Gupta et al. [11], We encode the depthmap to a 3D image called HHA [10], which can be directly used as an input of the pre-trained network path for depth feature along with fine-tuning. The HHA representation encodes the properties of geocentric poses that emphasize complementary discontinuities in the image, which is hard to be trained through convolutional network. We compute depth features through ResNet with the same number of layers as RGB. As depicted in Figure 1, we utilize 4-level RGB and depth features with different resolutions similarly to the RefineNet. We take res5, res4, res3, and res2 features in ResNet [14] as inputs to our MMFNet. For each MMFNet, we include a dropout layer for regularization with ratio of 0.5 before 1 1 convolution. The MMFNet consists of ReLU nonlinearity, 3 3 convolution, and 5 5 pooling layer with stride of 1 and the number of filters (channels) in 4984
6 the block is set to 512 for MMFNet-4 and 256 for the others. RefineNet blocks take the fused features and the previously refined feature as inputs except RefineNet-4 which only takes a fused feature from res5. The RefineNet-4 does not perform multi-resolution fusion. The number of filters in each RefineNet is set to the same as those of each MMFNet output. Final feature map obtained by RefineNet- 1 goes through two additional RCUs, then another 1 1 convolution for the prediction with a dropout layer with ratio of 0.5. We add a softmax loss layer for loss computation. Our network with MMF blocks can be efficiently trained on a single GPU while fully utilizing the potentials of extremely deep RGB-D network. 4. Experiments In this section, we evaluate our network through comprehensive experiments. We use two publicly available RGB- D datasets: NYUDv2 [35] and SUN RGB-D [37]. For the evaluation, we report three types of metrics (pixel accuracy, mean accuracy, and mean intersection over union (IoU)) widely-used to measure the performance of semantic segmentation [30]. As mentioned before, we use HHA encoding computed from a depthmap as our depth modality input Training details We implemented our network using the publicly available Caffe toolbox [18] with an Nvidia GTX Titan X GPU. We employed general data augmentation schemes: random scaling, random cropping, and random flipping. We applied test-time multi-scale evaluation for all experiments by averaging the resulting predictions. We set the momentum and weight decay to 0.9 and , respectively. We used the initial learning rate of 10 4 and divided it by 10 when the loss converges to a certain range and stops decreasing. We multiplied the learning rate by 0.1 for the base ResNet layers. All the parameters not in the base ResNet are initialized by a normal distribution with zero mean and10 2 variance, while the biases were initialized with zero NYUDv2 NYUDv2 [35] is one of the most popular RGB-D dataset, which contains 1449 densely labeled pairs of RGB and depth images captured by using Microsoft Kinect. The dataset also provides inpainted depthmaps computed by the colorization method of Levin et al. [24], and we used the inpainted depthmaps for experiments. Following the standard train/test split, we use 795 training images and 654 test images. We evaluate our network for 40 classes using the labels provided by [10]. We first compare our RDFNet with the existing indoor semantic segmentation methods using CNN features. The results are shown in Table 1. It shows that our network outperforms all existing RGB-D methods as well as RGB data pixel acc. mean acc. IoU Gupta et al. [11] RGB-D Eigen et al. [7] RGB-D FCN [30] RGB-D Wang et al. [39] RGB-D Context [27] RGB Refine-101 [26] RGB Refine-152 [26] RGB RDF-152 (ours) RGB-D Table 1. Semantic segmentation accuracy on NYUDv2. Our RDFNet outperforms all existing methods. pixel acc. mean acc. IoU RDF RDF RDF Table 2. Semantic segmentation accuracy on NYUDv2 of our network with variants of the pre-trained residual network. methods, demonstrating that our network effectively utilizes depth information. It improves the accuracy of RGBonly RefineNet by 2.4%, 3.9%, and 3.6% for pixel accuracy, mean accuracy, and mean IoU, respectively. As the multi-level features of our network are not limited to a specific pre-trained network, we report the accuracies of our network using residual networks with different number of layers, i.e., Res-50, Res-101, and Res-152. The results are shown in Table 2. It shows that the deeper the network becomes, the better results we generally get, while the amount of improvement decreases. It is noteworthy that the accuracy of our network with Res-50 using RGB-D data (RDF-50) is higher than those of RefineNet with Res-152 using RGB data (Refine-152 [26]). Class-wise accuracies of our results compared with those of RefineNet are shown in Table 3. Our results show significant improvement in most categories by effectively employing depth features, especially in categories with clear geometric distinction such as table, counter, and dresser. The lower accuracy reported for the board class is due to the fact that there are few images containing boards in the dataset. It is also hard to improve the discrimination between a board and a picture with little geometric differences even using additional depth features. We validate our network in Table 4 by comparing with other variants. Here we use Res-101 for the experiments. We first report the accuracies of depth-only networks to show that the RefineNet also works properly for extracting depth features from HHA encoding, which validates our choice of depth feature part. We trained a RefineNet model based on ResNet features finetuned using only HHA input. The accuracy of RefineNet only using HHA (Refine- HHAonly) is even higher than FCN using both RGB and HHA. This result demonstrates that ResNet with finetuning 4985
7 wall floor cabinet bed chair sofa table door window bkshelf Refine-101 [26] RDF RDF picture counter blind desk shelf curtain dresser pillow mirror mat Refine-101 [26] RDF RDF cloths ceiling books refridg tv paper towel shower box board Refine-101 [26] RDF RDF person stand toilet sink lamp bathtub bag othstr othfurn othprop Refine-101 [26] RDF RDF Table 3. Class-wise semantic segmentation accuracy (IoU) on NYUDv2. pixel acc. mean acc. IoU FCN32-HHAonly Refine-HHAonly Refine-Concat RDF Without RP Without conv Without skip RDF-101-depth Table 4. Comparison for different variants of network. can extract appropriate features from depth data. We also compare our MMFNet with a baseline fusion method. For the comparison, we replace our MMFNet with feature concatenation fusion with additional dropout layer and one convolution layer for dimension reduction. Here we only compare with the multi-level concatenation fusion (Refine-Concat) because we found that it generally shows better accuracy than other fusion architectures (early fusion, late fusion, and other variations). Note that the results show that our MMFNet effectively utilizes multi-modal features, achieving higher accuracies for all metrics, specifically by 1.1%, 3.0%, and 2.1%, respectively. It confirms that the improvement specifically comes from MMF rather than simple addition of depth information. We additionally conduct ablative experiments for our MMFNet by successively eliminating each component (Table 4). Without residual pooling (Without RP) the accuracy decreases slightly, which means the additional residual pooling is rather optional. We found further pooling did not improve the accuracy. However, the experiments show that the other components are crucial for effective feature fusion. Without the convolution (Without conv) that adapdata pixel acc. mean acc. IoU Ren et al. [32] RGB-D B-SegNet [19] RGB LSTM [25] RGB-D FuseNet [13] RGB-D Context [28] RGB Refine-152 [26] RGB RDF-152 (ours) RGB-D Table 5. Semantic segmentation accuracy on SUN RGB-D. Our RDFNet achieves the state-of-the-art accuracy. tively controls the weight to fuse each modality feature, we obtained much less accuracy while it is only slightly higher than those of concat fusion. We additionally report the accuracy without skip connection in RCUs (Without skip). Here the features directly go through the nonlinearity transformations and sum fusion. By comparing the accuracies, we can see the importance of skip connection for effective end-toend training of multi-level features. We finally report the result of our network trained directly on depth data instead of HHA to show that our network can be applied to different types of RGBD inputs. We preprocessed the depth to roughly scale the values into the range of Specifically, we simply used k/depth, similarly to the disparity channel in HHA, where k is a constant. The result (RDF-101-depth) shows consistent improvement over RefineNet while slightly worse than our RDFNet with HHA (RDF-101). It indicates that our RDFNet can efficiently learn to extract meaningful features directly from the depth data as well SUN RGB D SUN RGB-D dataset [37] has been built for a large-scale RGB-D benchmark. The dataset consists of pairs of 4986

![RefineNet [26].](/docs-images/81/83679857/images/8-1.jpg "From left to right for each example: image, ground")


, ceiling with clear")
, cabinet with low illumination")
, and top surface of a table")
.")

![sensors, which contains images from NYUDv2 depth [35],](/docs-images/81/83679857/images/8-11.jpg "Berkeley B3DO [16], and SUN3D [40], as well as newly")















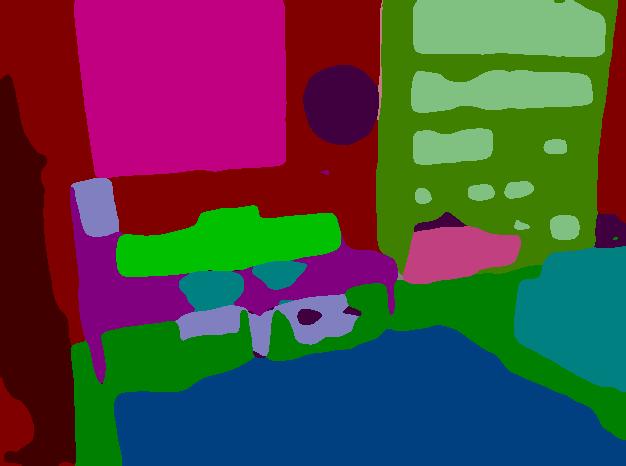




8 (a) (b) (c) (d) (e) (f) (g) (h) (i) (j) Figure 6. Qualitative results of our RDFNet compared with RefineNet [26]. From left to right for each example: image, ground truth, the results obtained by RefineNet, and ours. Note that the depth features help to discriminate regions that might be confusing only with color features, e.g., pillow with patterns similar to bed (a), the door with a homogeneous pattern (b, e), ceiling with clear geometric distinction (c), counter with vertical surface normal (d, f), cabinet with low illumination (g), mirror reflecting other color patterns (a, b), floor mat on the floor (h), and top surface of a table (c,i). The last example shows a failure case of ours (j). Best viewed in color. RGB and depth images captured from four different depth sensors, which contains images from NYUDv2 depth [35], Berkeley B3DO [16], and SUN3D [40], as well as newly captured images. We use the standard split of 5285 training images and 5050 test images with pixel-wise labeling of 37 classes for evaluation. Table 5 shows that our network outperforms existing RGB-D methods by a large margin. It also achieves the state-of-the-art accuracy for all metrics, improving the accuracy of RGB-only RefineNet by a considerable amount. The ability of depth feature might be slightly diminished for this dataset because it contains many bad depth images with invalid measurements, e.g., images obtained by RealSense RGB-D camera. Nevertheless, the results demonstrate that our network learns effective RGB-D features on a large-scale dataset even without manually weeding the bad images out Qualitative results We show some qualitative results of ours compared with RefineNet [26] in Figure 6. We obtained the results of the RefineNet by running the publicly available source code with the provided model based on Res-101. We compare the results with our RDF-101 using RGB-D inputs. The comparisons illustrate that our network effectively utilizes depth features to discriminate regions that might be confusing with only color features. 5. Conclusion We proposed a novel network that takes full advantage of residual learning with skip-connection to extract effective multi-modal CNN features for semantic segmentation. The residual architecture facilitates efficient end-to-end training of very deep RGB-D CNN features on a single GPU. Our MMFNet shows that the recent multi-level feature refinement architecture [26] can be effectively extended to utilize features in different modalities, while retaining the advantage of skip-connection. Our experiments demonstrated that the proposed network outperforms existing methods, obtaining the state-of-the-art mean IoUs of 50.1% and 47.7% for NYUDv2 and SUN RGB-D indoor datasets, respectively. Acknowledgements This work was supported by the Ministry of Science and ICT, Korea, through IITP grant (R ), Giga Korea grant (GK17P0300), and NRF grant (NRF-2014R1A2A1A ). References [1] A. Arnab, S. Jayasumana, S. Zheng, and P. H. Torr. Higher order conditional random fields in deep neural networks. In Proc. ECCV, pages Springer, , 2 [2] V. Badrinarayanan, A. Kendall, and R. Cipolla. Segnet: A deep convolutional encoder-decoder architecture for image segmentation. arxiv preprint arxiv: ,
9 [3] S. Chandra and I. Kokkinos. Fast, exact and multi-scale inference for semantic image segmentation with deep gaussian crfs. In Proc. ECCV, pages Springer, , 2 [4] L.-C. Chen, G. Papandreou, I. Kokkinos, K. Murphy, and A. L. Yuille. Semantic image segmentation with deep convolutional nets and fully connected crfs. arxiv preprint arxiv: , , 2 [5] C. Couprie, C. Farabet, L. Najman, and Y. LeCun. Indoor semantic segmentation using depth information. arxiv preprint arxiv: , , 2, 3 [6] Z. Deng, S. Todorovic, and L. Jan Latecki. Semantic segmentation of rgbd images with mutex constraints. In Proc. ICCV, pages , , 2, 3 [7] D. Eigen and R. Fergus. Predicting depth, surface normals and semantic labels with a common multi-scale convolutional architecture. In Proc. ICCV, pages , , 2, 3, 6 [8] C. Farabet, C. Couprie, L. Najman, and Y. LeCun. Learning hierarchical features for scene labeling. IEEE transactions on pattern analysis and machine intelligence, 35(8): , [9] R. Girshick, J. Donahue, T. Darrell, and J. Malik. Rich feature hierarchies for accurate object detection and semantic segmentation. In Proc. CVPR, pages , [10] S. Gupta, P. Arbelaez, and J. Malik. Perceptual organization and recognition of indoor scenes from rgb-d images. In Proc. CVPR, pages , , 2, 3, 5, 6 [11] S. Gupta, R. Girshick, P. Arbeláez, and J. Malik. Learning rich features from rgb-d images for object detection and segmentation. In Proc. ECCV, pages Springer, , 2, 3, 5, 6 [12] B. Hariharan, P. Arbeláez, R. Girshick, and J. Malik. Hypercolumns for object segmentation and fine-grained localization. In Proc. CVPR, pages , [13] C. Hazirbas, L. Ma, C. Domokos, and D. Cremers. Fusenet: Incorporating depth into semantic segmentation via fusionbased cnn architecture. In Proc. ACCV, volume 2, , 2, 3, 7 [14] K. He, X. Zhang, S. Ren, and J. Sun. Deep residual learning for image recognition. arxiv preprint arxiv: , , 2, 4, 5 [15] K. He, X. Zhang, S. Ren, and J. Sun. Identity mappings in deep residual networks. In Proc. ECCV, pages Springer, , 4 [16] A. Janoch, S. Karayev, Y. Jia, J. T. Barron, M. Fritz, K. Saenko, and T. Darrell. A category-level 3d object dataset: Putting the kinect to work. In Consumer Depth Cameras for Computer Vision, pages Springer, [17] S. Jégou, M. Drozdzal, D. Vazquez, A. Romero, and Y. Bengio. The one hundred layers tiramisu: Fully convolutional densenets for semantic segmentation. arxiv preprint arxiv: , [18] Y. Jia, E. Shelhamer, J. Donahue, S. Karayev, J. Long, R. Girshick, S. Guadarrama, and T. Darrell. Caffe: Convolutional architecture for fast feature embedding. arxiv preprint arxiv: , [19] A. Kendall, V. Badrinarayanan, and R. Cipolla. Bayesian segnet: Model uncertainty in deep convolutional encoderdecoder architectures for scene understanding. arxiv preprint arxiv: , , 7 [20] S. H. Khan, M. Bennamoun, F. Sohel, and R. Togneri. Geometry driven semantic labeling of indoor scenes. In Proc. ECCV, pages Springer, , 2, 3 [21] V. Koltun. Efficient inference in fully connected crfs with gaussian edge potentials. In Proc. NIPS, [22] A. Krizhevsky, I. Sutskever, and G. E. Hinton. Imagenet classification with deep convolutional neural networks. In Proc. NIPS, pages , , 2 [23] L. Ladickỳ, P. Sturgess, K. Alahari, C. Russell, and P. H. Torr. What, where and how many? combining object detectors and crfs. In Proc. ECCV, pages Springer, [24] A. Levin, D. Lischinski, and Y. Weiss. Colorization using optimization. In ACM transactions on graphics (tog), volume 23, pages ACM, [25] Z. Li, Y. Gan, X. Liang, Y. Yu, H. Cheng, and L. Lin. Lstmcf: Unifying context modeling and fusion with lstms for rgbd scene labeling. In Proc. ECCV, pages Springer, , 2, 3, 7 [26] G. Lin, A. Milan, C. Shen, and I. Reid. RefineNet: Multipath refinement networks for high-resolution semantic segmentation. In CVPR, July , 4, 6, 7, 8 [27] G. Lin, C. Shen, A. v. d. Hengel, and I. Reid. Exploring context with deep structured models for semantic segmentation. arxiv preprint arxiv: , , 6 [28] G. Lin, C. Shen, A. van den Hengel, and I. Reid. Efficient piecewise training of deep structured models for semantic segmentation. In Proc. CVPR, pages , , 2, 7 [29] Z. Liu, X. Li, P. Luo, C.-C. Loy, and X. Tang. Semantic image segmentation via deep parsing network. In Proc. ICCV, pages , , 2 [30] J. Long, E. Shelhamer, and T. Darrell. Fully convolutional networks for semantic segmentation. In Proc. CVPR, pages , , 2, 3, 6 [31] H. Noh, S. Hong, and B. Han. Learning deconvolution network for semantic segmentation. In Proc. ICCV, pages , [32] X. Ren, L. Bo, and D. Fox. Rgb-(d) scene labeling: Features and algorithms. In Proc. CVPR, pages IEEE, , 2, 3, 7 [33] O. Ronneberger, P. Fischer, and T. Brox. U-net: Convolutional networks for biomedical image segmentation. In International Conference on Medical Image Computing and Computer-Assisted Intervention, pages Springer, [34] C. Russell, P. Kohli, P. H. Torr, et al. Associative hierarchical crfs for object class image segmentation. In Proc. ICCV, pages IEEE, [35] N. Silberman, D. Hoiem, P. Kohli, and R. Fergus. Indoor segmentation and support inference from rgbd images. In Proc. ECCV, pages Springer, , 2, 3, 6,
10 [36] K. Simonyan and A. Zisserman. Very deep convolutional networks for large-scale image recognition. arxiv preprint arxiv: , , 2 [37] S. Song, S. P. Lichtenberg, and J. Xiao. Sun rgb-d: A rgb-d scene understanding benchmark suite. In Proc. CVPR, pages , , 7 [38] F. Visin, K. Kastner, K. Cho, M. Matteucci, A. Courville, and Y. Bengio. Renet: A recurrent neural network based alternative to convolutional networks. arxiv preprint arxiv: , [39] J. Wang, Z. Wang, D. Tao, S. See, and G. Wang. Learning common and specific features for rgb-d semantic segmentation with deconvolutional networks. In Proc. ECCV, pages Springer, , 2, 3, 6 [40] J. Xiao, A. Owens, and A. Torralba. Sun3d: A database of big spaces reconstructed using sfm and object labels. In Proc. ICCV, pages , [41] J. Yao, S. Fidler, and R. Urtasun. Describing the scene as a whole: Joint object detection, scene classification and semantic segmentation. In Proc. CVPR, pages IEEE, [42] F. Yu and V. Koltun. Multi-scale context aggregation by dilated convolutions. In ICLR, , 2 [43] M. D. Zeiler and R. Fergus. Visualizing and understanding convolutional networks. In Proc. ECCV, pages Springer, , 2 [44] Z. Zhang. Microsoft kinect sensor and its effect. IEEE multimedia, 19(2):4 10, [45] S. Zheng, S. Jayasumana, B. Romera-Paredes, V. Vineet, Z. Su, D. Du, C. Huang, and P. H. Torr. Conditional random fields as recurrent neural networks. In Proc. ICCV, pages , ,
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
 : Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1,2, Anton Milan 1, Chunhua Shen 1,2, Ian Reid 1,2 1 The University of Adelaide, 2 Australian Centre for Robotic
: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1,2, Anton Milan 1, Chunhua Shen 1,2, Ian Reid 1,2 1 The University of Adelaide, 2 Australian Centre for Robotic
RefineNet: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation
 : Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1 Anton Milan 2 Chunhua Shen 2,3 Ian Reid 2,3 1 Nanyang Technological University 2 University of Adelaide 3 Australian
: Multi-Path Refinement Networks for High-Resolution Semantic Segmentation Guosheng Lin 1 Anton Milan 2 Chunhua Shen 2,3 Ian Reid 2,3 1 Nanyang Technological University 2 University of Adelaide 3 Australian
Encoder-Decoder Networks for Semantic Segmentation. Sachin Mehta
 Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
Encoder-Decoder Networks for Semantic Segmentation Sachin Mehta Outline > Overview of Semantic Segmentation > Encoder-Decoder Networks > Results What is Semantic Segmentation? Input: RGB Image Output:
arxiv: v1 [cs.cv] 31 Mar 2016
![arxiv: v1 [cs.cv] 31 Mar 2016](/thumbs/92/108399479.jpg "arxiv: v1 [cs.cv] 31 Mar 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu and C.-C. Jay Kuo arxiv:1603.09742v1 [cs.cv] 31 Mar 2016 University of Southern California Abstract.
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION
 REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
REGION AVERAGE POOLING FOR CONTEXT-AWARE OBJECT DETECTION Kingsley Kuan 1, Gaurav Manek 1, Jie Lin 1, Yuan Fang 1, Vijay Chandrasekhar 1,2 Institute for Infocomm Research, A*STAR, Singapore 1 Nanyang Technological
Deep learning for dense per-pixel prediction. Chunhua Shen The University of Adelaide, Australia
 Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Deep learning for dense per-pixel prediction Chunhua Shen The University of Adelaide, Australia Image understanding Classification error Convolution Neural Networks 0.3 0.2 0.1 Image Classification [Krizhevsky
Depth-aware CNN for RGB-D Segmentation
 Depth-aware CNN for RGB-D Segmentation Weiyue Wang [0000 0002 8114 8271] and Ulrich Neumann University of Southern California, Los Angeles, California {weiyuewa,uneumann}@usc.edu Abstract. Convolutional
Depth-aware CNN for RGB-D Segmentation Weiyue Wang [0000 0002 8114 8271] and Ulrich Neumann University of Southern California, Los Angeles, California {weiyuewa,uneumann}@usc.edu Abstract. Convolutional
A MULTI-RESOLUTION FUSION MODEL INCORPORATING COLOR AND ELEVATION FOR SEMANTIC SEGMENTATION
 A MULTI-RESOLUTION FUSION MODEL INCORPORATING COLOR AND ELEVATION FOR SEMANTIC SEGMENTATION Wenkai Zhang a, b, Hai Huang c, *, Matthias Schmitz c, Xian Sun a, Hongqi Wang a, Helmut Mayer c a Key Laboratory
A MULTI-RESOLUTION FUSION MODEL INCORPORATING COLOR AND ELEVATION FOR SEMANTIC SEGMENTATION Wenkai Zhang a, b, Hai Huang c, *, Matthias Schmitz c, Xian Sun a, Hongqi Wang a, Helmut Mayer c a Key Laboratory
Lecture 7: Semantic Segmentation
 Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Semantic Segmentation CSED703R: Deep Learning for Visual Recognition (207F) Segmenting images based on its semantic notion Lecture 7: Semantic Segmentation Bohyung Han Computer Vision Lab. bhhanpostech.ac.kr
Fully Convolutional Networks for Semantic Segmentation
 Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Fully Convolutional Networks for Semantic Segmentation Jonathan Long* Evan Shelhamer* Trevor Darrell UC Berkeley Chaim Ginzburg for Deep Learning seminar 1 Semantic Segmentation Define a pixel-wise labeling
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image. Supplementary Material
 Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image Supplementary Material Siyuan Huang 1,2, Siyuan Qi 1,2, Yixin Zhu 1,2, Yinxue Xiao 1, Yuanlu Xu 1,2, and Song-Chun Zhu 1,2 1 University
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION
 HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
HIERARCHICAL JOINT-GUIDED NETWORKS FOR SEMANTIC IMAGE SEGMENTATION Chien-Yao Wang, Jyun-Hong Li, Seksan Mathulaprangsan, Chin-Chin Chiang, and Jia-Ching Wang Department of Computer Science and Information
Deconvolutions in Convolutional Neural Networks
 Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Overview Deconvolutions in Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Deconvolutions in CNNs Applications Network visualization
Channel Locality Block: A Variant of Squeeze-and-Excitation
 Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Channel Locality Block: A Variant of Squeeze-and-Excitation 1 st Huayu Li Northern Arizona University Flagstaff, United State Northern Arizona University hl459@nau.edu arxiv:1901.01493v1 [cs.lg] 6 Jan
Semantic Segmentation
 Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Semantic Segmentation UCLA:https://goo.gl/images/I0VTi2 OUTLINE Semantic Segmentation Why? Paper to talk about: Fully Convolutional Networks for Semantic Segmentation. J. Long, E. Shelhamer, and T. Darrell,
Fully Convolutional Network for Depth Estimation and Semantic Segmentation
 Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
Fully Convolutional Network for Depth Estimation and Semantic Segmentation Yokila Arora ICME Stanford University yarora@stanford.edu Ishan Patil Department of Electrical Engineering Stanford University
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS. Kuan-Chuan Peng and Tsuhan Chen
 A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
A FRAMEWORK OF EXTRACTING MULTI-SCALE FEATURES USING MULTIPLE CONVOLUTIONAL NEURAL NETWORKS Kuan-Chuan Peng and Tsuhan Chen School of Electrical and Computer Engineering, Cornell University, Ithaca, NY
Learning Fully Dense Neural Networks for Image Semantic Segmentation
 Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research
Learning Fully Dense Neural Networks for Image Semantic Segmentation Mingmin Zhen 1, Jinglu Wang 2, Lei Zhou 1, Tian Fang 3, Long Quan 1 1 Hong Kong University of Science and Technology, 2 Microsoft Research
arxiv: v1 [cs.cv] 24 May 2016
![arxiv: v1 [cs.cv] 24 May 2016](/thumbs/80/80473828.jpg "arxiv: v1 [cs.cv] 24 May 2016") Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
Dense CNN Learning with Equivalent Mappings arxiv:1605.07251v1 [cs.cv] 24 May 2016 Jianxin Wu Chen-Wei Xie Jian-Hao Luo National Key Laboratory for Novel Software Technology, Nanjing University 163 Xianlin
LSTM and its variants for visual recognition. Xiaodan Liang Sun Yat-sen University
 LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
LSTM and its variants for visual recognition Xiaodan Liang xdliang328@gmail.com Sun Yat-sen University Outline Context Modelling with CNN LSTM and its Variants LSTM Architecture Variants Application in
3D Densely Convolutional Networks for Volumetric Segmentation. Toan Duc Bui, Jitae Shin, and Taesup Moon
 3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
3D Densely Convolutional Networks for Volumetric Segmentation Toan Duc Bui, Jitae Shin, and Taesup Moon School of Electronic and Electrical Engineering, Sungkyunkwan University, Republic of Korea arxiv:1709.03199v2
Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab.
 [ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
[ICIP 2017] Direct Multi-Scale Dual-Stream Network for Pedestrian Detection Sang-Il Jung and Ki-Sang Hong Image Information Processing Lab., POSTECH Pedestrian Detection Goal To draw bounding boxes that
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs
 DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
DeepLab: Semantic Image Segmentation with Deep Convolutional Nets, Atrous Convolution and Fully Connected CRFs Zhipeng Yan, Moyuan Huang, Hao Jiang 5/1/2017 1 Outline Background semantic segmentation Objective,
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material
 Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
Volumetric and Multi-View CNNs for Object Classification on 3D Data Supplementary Material Charles R. Qi Hao Su Matthias Nießner Angela Dai Mengyuan Yan Leonidas J. Guibas Stanford University 1. Details
3D Object Recognition and Scene Understanding from RGB-D Videos. Yu Xiang Postdoctoral Researcher University of Washington
 3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
3D Object Recognition and Scene Understanding from RGB-D Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World
RGBd Image Semantic Labelling for Urban Driving Scenes via a DCNN
 RGBd Image Semantic Labelling for Urban Driving Scenes via a DCNN Jason Bolito, Research School of Computer Science, ANU Supervisors: Yiran Zhong & Hongdong Li 2 Outline 1. Motivation and Background 2.
RGBd Image Semantic Labelling for Urban Driving Scenes via a DCNN Jason Bolito, Research School of Computer Science, ANU Supervisors: Yiran Zhong & Hongdong Li 2 Outline 1. Motivation and Background 2.
arxiv: v2 [cs.cv] 18 Jul 2017
![arxiv: v2 [cs.cv] 18 Jul 2017](/thumbs/72/67294650.jpg "arxiv: v2 [cs.cv] 18 Jul 2017") PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
PHAM, ITO, KOZAKAYA: BISEG 1 arxiv:1706.02135v2 [cs.cv] 18 Jul 2017 BiSeg: Simultaneous Instance Segmentation and Semantic Segmentation with Fully Convolutional Networks Viet-Quoc Pham quocviet.pham@toshiba.co.jp
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network
 Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
Extend the shallow part of Single Shot MultiBox Detector via Convolutional Neural Network Liwen Zheng, Canmiao Fu, Yong Zhao * School of Electronic and Computer Engineering, Shenzhen Graduate School of
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation
 LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation Abhishek Chaurasia School of Electrical and Computer Engineering Purdue University West Lafayette, USA Email: aabhish@purdue.edu
LinkNet: Exploiting Encoder Representations for Efficient Semantic Segmentation Abhishek Chaurasia School of Electrical and Computer Engineering Purdue University West Lafayette, USA Email: aabhish@purdue.edu
Content-Based Image Recovery
 Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Content-Based Image Recovery Hong-Yu Zhou and Jianxin Wu National Key Laboratory for Novel Software Technology Nanjing University, China zhouhy@lamda.nju.edu.cn wujx2001@nju.edu.cn Abstract. We propose
Dense Image Labeling Using Deep Convolutional Neural Networks
 Dense Image Labeling Using Deep Convolutional Neural Networks Md Amirul Islam, Neil Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, MB {amirul, bruce, ywang}@cs.umanitoba.ca
Dense Image Labeling Using Deep Convolutional Neural Networks Md Amirul Islam, Neil Bruce, Yang Wang Department of Computer Science University of Manitoba Winnipeg, MB {amirul, bruce, ywang}@cs.umanitoba.ca
Structured Prediction using Convolutional Neural Networks
 Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Overview Structured Prediction using Convolutional Neural Networks Bohyung Han bhhan@postech.ac.kr Computer Vision Lab. Convolutional Neural Networks (CNNs) Structured predictions for low level computer
Depth Estimation from a Single Image Using a Deep Neural Network Milestone Report
 Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Figure 1: The architecture of the convolutional network. Input: a single view image; Output: a depth map. 3 Related Work In [4] they used depth maps of indoor scenes produced by a Microsoft Kinect to successfully
Perceiving the 3D World from Images and Videos. Yu Xiang Postdoctoral Researcher University of Washington
 Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Perceiving the 3D World from Images and Videos Yu Xiang Postdoctoral Researcher University of Washington 1 2 Act in the 3D World Sensing & Understanding Acting Intelligent System 3D World 3 Understand
Context Contrasted Feature and Gated Multi-scale Aggregation for Scene Segmentation
 Context Contrasted Feature and Gated Multi-scale Aggregation for Scene Segmentation Henghui Ding 1 Xudong Jiang 1 Bing Shuai 1 Ai Qun Liu 1 Gang Wang 2 1 School of Electrical and Electronic Engineering,
Context Contrasted Feature and Gated Multi-scale Aggregation for Scene Segmentation Henghui Ding 1 Xudong Jiang 1 Bing Shuai 1 Ai Qun Liu 1 Gang Wang 2 1 School of Electrical and Electronic Engineering,
Hand-Object Interaction Detection with Fully Convolutional Networks
 Hand-Object Interaction Detection with Fully Convolutional Networks Matthias Schröder Helge Ritter Neuroinformatics Group, Bielefeld University {maschroe,helge}@techfak.uni-bielefeld.de Abstract Detecting
Hand-Object Interaction Detection with Fully Convolutional Networks Matthias Schröder Helge Ritter Neuroinformatics Group, Bielefeld University {maschroe,helge}@techfak.uni-bielefeld.de Abstract Detecting
Convolutional Neural Networks. Computer Vision Jia-Bin Huang, Virginia Tech
 Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
Convolutional Neural Networks Computer Vision Jia-Bin Huang, Virginia Tech Today s class Overview Convolutional Neural Network (CNN) Training CNN Understanding and Visualizing CNN Image Categorization:
HENet: A Highly Efficient Convolutional Neural. Networks Optimized for Accuracy, Speed and Storage
 HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
HENet: A Highly Efficient Convolutional Neural Networks Optimized for Accuracy, Speed and Storage Qiuyu Zhu Shanghai University zhuqiuyu@staff.shu.edu.cn Ruixin Zhang Shanghai University chriszhang96@shu.edu.cn
FuseNet: Incorporating Depth into Semantic Segmentation via Fusion-based CNN Architecture
 FuseNet: Incorporating Depth into Semantic Segmentation via Fusion-based CNN Architecture Caner Hazirbas, Lingni Ma, Csaba Domoos, and Daniel Cremers Technical University of Munich, Germany {hazirbas,lingni,domoos,cremers}@cs.tum.edu
FuseNet: Incorporating Depth into Semantic Segmentation via Fusion-based CNN Architecture Caner Hazirbas, Lingni Ma, Csaba Domoos, and Daniel Cremers Technical University of Munich, Germany {hazirbas,lingni,domoos,cremers}@cs.tum.edu
arxiv: v4 [cs.cv] 6 Jul 2016
![arxiv: v4 [cs.cv] 6 Jul 2016](/thumbs/93/112985717.jpg "arxiv: v4 [cs.cv] 6 Jul 2016") Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Object Boundary Guided Semantic Segmentation Qin Huang, Chunyang Xia, Wenchao Zheng, Yuhang Song, Hao Xu, C.-C. Jay Kuo (qinhuang@usc.edu) arxiv:1603.09742v4 [cs.cv] 6 Jul 2016 Abstract. Semantic segmentation
Computer Vision Lecture 16
 Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Announcements Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Seminar registration period starts on Friday We will offer a lab course in the summer semester Deep Robot Learning Topic:
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
Computer Vision Lecture 16 Deep Learning Applications 11.01.2017 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period starts
3D Graph Neural Networks for RGBD Semantic Segmentation
 3D Graph Neural Networks for RGBD Semantic Segmentation Xiaojuan Qi Renjie Liao, Jiaya Jia, Sanja Fidler Raquel Urtasun, The Chinese University of Hong Kong University of Toronto Uber Advanced Technologies
3D Graph Neural Networks for RGBD Semantic Segmentation Xiaojuan Qi Renjie Liao, Jiaya Jia, Sanja Fidler Raquel Urtasun, The Chinese University of Hong Kong University of Toronto Uber Advanced Technologies
Deep Learning in Visual Recognition. Thanks Da Zhang for the slides
 Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
Deep Learning in Visual Recognition Thanks Da Zhang for the slides Deep Learning is Everywhere 2 Roadmap Introduction Convolutional Neural Network Application Image Classification Object Detection Object
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS. Zhao Chen Machine Learning Intern, NVIDIA
 JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
JOINT DETECTION AND SEGMENTATION WITH DEEP HIERARCHICAL NETWORKS Zhao Chen Machine Learning Intern, NVIDIA ABOUT ME 5th year PhD student in physics @ Stanford by day, deep learning computer vision scientist
Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling
 [DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
[DOI: 10.2197/ipsjtcva.7.99] Express Paper Cost-alleviative Learning for Deep Convolutional Neural Network-based Facial Part Labeling Takayoshi Yamashita 1,a) Takaya Nakamura 1 Hiroshi Fukui 1,b) Yuji
Feature-Fused SSD: Fast Detection for Small Objects
 Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Feature-Fused SSD: Fast Detection for Small Objects Guimei Cao, Xuemei Xie, Wenzhe Yang, Quan Liao, Guangming Shi, Jinjian Wu School of Electronic Engineering, Xidian University, China xmxie@mail.xidian.edu.cn
Conditional Random Fields as Recurrent Neural Networks
 BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
BIL722 - Deep Learning for Computer Vision Conditional Random Fields as Recurrent Neural Networks S. Zheng, S. Jayasumana, B. Romera-Paredes V. Vineet, Z. Su, D. Du, C. Huang, P.H.S. Torr Introduction
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Proceedings of the International MultiConference of Engineers and Computer Scientists 2018 Vol I IMECS 2018, March 14-16, 2018, Hong Kong
 , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
, March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong , March 14-16, 2018, Hong Kong TABLE I CLASSIFICATION ACCURACY OF DIFFERENT PRE-TRAINED MODELS ON THE TEST DATA
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus
 Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
Predicting Depth, Surface Normals and Semantic Labels with a Common Multi-Scale Convolutional Architecture David Eigen, Rob Fergus Presented by: Rex Ying and Charles Qi Input: A Single RGB Image Estimate
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material
 DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
DeepIM: Deep Iterative Matching for 6D Pose Estimation - Supplementary Material Yi Li 1, Gu Wang 1, Xiangyang Ji 1, Yu Xiang 2, and Dieter Fox 2 1 Tsinghua University, BNRist 2 University of Washington
Label Propagation in RGB-D Video
 Label Propagation in RGB-D Video Md. Alimoor Reza, Hui Zheng, Georgios Georgakis, Jana Košecká Abstract We propose a new method for the propagation of semantic labels in RGB-D video of indoor scenes given
Label Propagation in RGB-D Video Md. Alimoor Reza, Hui Zheng, Georgios Georgakis, Jana Košecká Abstract We propose a new method for the propagation of semantic labels in RGB-D video of indoor scenes given
SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite Supplimentary Material
 SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite Supplimentary Material Shuran Song Samuel P. Lichtenberg Jianxiong Xiao Princeton University http://rgbd.cs.princeton.edu. Segmetation Result wall
SUN RGB-D: A RGB-D Scene Understanding Benchmark Suite Supplimentary Material Shuran Song Samuel P. Lichtenberg Jianxiong Xiao Princeton University http://rgbd.cs.princeton.edu. Segmetation Result wall
Study of Residual Networks for Image Recognition
 Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Study of Residual Networks for Image Recognition Mohammad Sadegh Ebrahimi Stanford University sadegh@stanford.edu Hossein Karkeh Abadi Stanford University hosseink@stanford.edu Abstract Deep neural networks
Deep learning for object detection. Slides from Svetlana Lazebnik and many others
 Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Deep learning for object detection Slides from Svetlana Lazebnik and many others Recent developments in object detection 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before deep
Two-Stream Convolutional Networks for Action Recognition in Videos
 Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Two-Stream Convolutional Networks for Action Recognition in Videos Karen Simonyan Andrew Zisserman Cemil Zalluhoğlu Introduction Aim Extend deep Convolution Networks to action recognition in video. Motivation
Depth Estimation from Single Image Using CNN-Residual Network
 Depth Estimation from Single Image Using CNN-Residual Network Xiaobai Ma maxiaoba@stanford.edu Zhenglin Geng zhenglin@stanford.edu Zhi Bie zhib@stanford.edu Abstract In this project, we tackle the problem
Depth Estimation from Single Image Using CNN-Residual Network Xiaobai Ma maxiaoba@stanford.edu Zhenglin Geng zhenglin@stanford.edu Zhi Bie zhib@stanford.edu Abstract In this project, we tackle the problem
YOLO9000: Better, Faster, Stronger
 YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
YOLO9000: Better, Faster, Stronger Date: January 24, 2018 Prepared by Haris Khan (University of Toronto) Haris Khan CSC2548: Machine Learning in Computer Vision 1 Overview 1. Motivation for one-shot object
arxiv: v1 [cs.cv] 8 Mar 2017 Abstract
![arxiv: v1 [cs.cv] 8 Mar 2017 Abstract](/thumbs/74/70449616.jpg "arxiv: v1 [cs.cv] 8 Mar 2017 Abstract") Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network Chao Peng Xiangyu Zhang Gang Yu Guiming Luo Jian Sun School of Software, Tsinghua University, {pengc14@mails.tsinghua.edu.cn,
Large Kernel Matters Improve Semantic Segmentation by Global Convolutional Network Chao Peng Xiangyu Zhang Gang Yu Guiming Luo Jian Sun School of Software, Tsinghua University, {pengc14@mails.tsinghua.edu.cn,
Computer Vision Lecture 16
 Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Computer Vision Lecture 16 Deep Learning for Object Categorization 14.01.2016 Bastian Leibe RWTH Aachen http://www.vision.rwth-aachen.de leibe@vision.rwth-aachen.de Announcements Seminar registration period
Learning with Side Information through Modality Hallucination
 Learning with Side Information through Modality Hallucination Judy Hoffman Saurabh Gupta Trevor Darrell EECS Department, UC Berkeley {jhoffman, sgupta, trevor}@eecs.berkeley.edu Abstract We present a modality
Learning with Side Information through Modality Hallucination Judy Hoffman Saurabh Gupta Trevor Darrell EECS Department, UC Berkeley {jhoffman, sgupta, trevor}@eecs.berkeley.edu Abstract We present a modality
Accurate Human-Limb Segmentation in RGB-D images for Intelligent Mobility Assistance Robots
 Accurate Human-Limb Segmentation in RGB-D images for Intelligent Mobility Assistance Robots Siddhartha Chandra 1,2 Stavros Tsogkas 2 Iasonas Kokkinos 1,2 siddhartha.chandra@inria.fr stavros.tsogkas@centralesupelec.fr
Accurate Human-Limb Segmentation in RGB-D images for Intelligent Mobility Assistance Robots Siddhartha Chandra 1,2 Stavros Tsogkas 2 Iasonas Kokkinos 1,2 siddhartha.chandra@inria.fr stavros.tsogkas@centralesupelec.fr
arxiv: v1 [cs.cv] 29 Sep 2016
![arxiv: v1 [cs.cv] 29 Sep 2016](/thumbs/76/73787064.jpg "arxiv: v1 [cs.cv] 29 Sep 2016") arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv:1609.09545v1 [cs.cv] 29 Sep 2016 Two-stage Convolutional Part Heatmap Regression for the 1st 3D Face Alignment in the Wild (3DFAW) Challenge Adrian Bulat and Georgios Tzimiropoulos Computer Vision
arxiv: v1 [cs.cv] 7 Jun 2016
![arxiv: v1 [cs.cv] 7 Jun 2016](/thumbs/86/93207990.jpg "arxiv: v1 [cs.cv] 7 Jun 2016") ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation arxiv:1606.02147v1 [cs.cv] 7 Jun 2016 Adam Paszke Faculty of Mathematics, Informatics and Mechanics University of Warsaw, Poland
ENet: A Deep Neural Network Architecture for Real-Time Semantic Segmentation arxiv:1606.02147v1 [cs.cv] 7 Jun 2016 Adam Paszke Faculty of Mathematics, Informatics and Mechanics University of Warsaw, Poland
R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection
 The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
The Thirty-Second AAAI Conference on Artificial Intelligence (AAAI-18) R-FCN++: Towards Accurate Region-Based Fully Convolutional Networks for Object Detection Zeming Li, 1 Yilun Chen, 2 Gang Yu, 2 Yangdong
Hierarchical Recurrent Filtering for Fully Convolutional DenseNets
 Hierarchical Recurrent Filtering for Fully Convolutional DenseNets Jörg Wagner 1,2, Volker Fischer 1, Michael Herman 1 and Sven Behnke 2 arxiv:1810.02766v1 [cs.cv] 5 Oct 2018 1- Bosch Center for Artificial
Hierarchical Recurrent Filtering for Fully Convolutional DenseNets Jörg Wagner 1,2, Volker Fischer 1, Michael Herman 1 and Sven Behnke 2 arxiv:1810.02766v1 [cs.cv] 5 Oct 2018 1- Bosch Center for Artificial
Presentation Outline. Semantic Segmentation. Overview. Presentation Outline CNN. Learning Deconvolution Network for Semantic Segmentation 6/6/16
 6/6/16 Learning Deconvolution Network for Semantic Segmentation Hyeonwoo Noh, Seunghoon Hong,Bohyung Han Department of Computer Science and Engineering, POSTECH, Korea Shai Rozenberg 6/6/2016 1 2 Semantic
6/6/16 Learning Deconvolution Network for Semantic Segmentation Hyeonwoo Noh, Seunghoon Hong,Bohyung Han Department of Computer Science and Engineering, POSTECH, Korea Shai Rozenberg 6/6/2016 1 2 Semantic
Three-Dimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients
 ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
ThreeDimensional Object Detection and Layout Prediction using Clouds of Oriented Gradients Authors: Zhile Ren, Erik B. Sudderth Presented by: Shannon Kao, Max Wang October 19, 2016 Introduction Given an
Real-time Object Detection CS 229 Course Project
 Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
Real-time Object Detection CS 229 Course Project Zibo Gong 1, Tianchang He 1, and Ziyi Yang 1 1 Department of Electrical Engineering, Stanford University December 17, 2016 Abstract Objection detection
arxiv: v1 [cs.cv] 24 Nov 2016
![arxiv: v1 [cs.cv] 24 Nov 2016](/thumbs/75/72258621.jpg "arxiv: v1 [cs.cv] 24 Nov 2016") Recalling Holistic Information for Semantic Segmentation arxiv:1611.08061v1 [cs.cv] 24 Nov 2016 Hexiang Hu UCLA Los Angeles, CA hexiang.frank.hu@gmail.com Abstract Fei Sha UCLA Los Angeles, CA feisha@cs.ucla.edu
Recalling Holistic Information for Semantic Segmentation arxiv:1611.08061v1 [cs.cv] 24 Nov 2016 Hexiang Hu UCLA Los Angeles, CA hexiang.frank.hu@gmail.com Abstract Fei Sha UCLA Los Angeles, CA feisha@cs.ucla.edu
Object detection with CNNs
 Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
Object detection with CNNs 80% PASCAL VOC mean0average0precision0(map) 70% 60% 50% 40% 30% 20% 10% Before CNNs After CNNs 0% 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015 2016 year Region proposals
ECCV Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016
 ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
ECCV 2016 Presented by: Boris Ivanovic and Yolanda Wang CS 331B - November 16, 2016 Fundamental Question What is a good vector representation of an object? Something that can be easily predicted from 2D
Supplementary Material for Sparsity Invariant CNNs
 Supplementary Material for Sparsity Invariant CNNs Jonas Uhrig,1,2 Nick Schneider,1,3 Lukas Schneider 1,4 Uwe Franke 1 Thomas Brox 2 Andreas Geiger 4,5 1 Daimler R&D Sindelfingen 2 University of Freiburg
Supplementary Material for Sparsity Invariant CNNs Jonas Uhrig,1,2 Nick Schneider,1,3 Lukas Schneider 1,4 Uwe Franke 1 Thomas Brox 2 Andreas Geiger 4,5 1 Daimler R&D Sindelfingen 2 University of Freiburg
In Defense of Fully Connected Layers in Visual Representation Transfer
 In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
In Defense of Fully Connected Layers in Visual Representation Transfer Chen-Lin Zhang, Jian-Hao Luo, Xiu-Shen Wei, Jianxin Wu National Key Laboratory for Novel Software Technology, Nanjing University,
Learning with Side Information through Modality Hallucination
 Master Seminar Report for Recent Trends in 3D Computer Vision Learning with Side Information through Modality Hallucination Judy Hoffman, Saurabh Gupta, Trevor Darrell. CVPR 2016 Nan Yang Supervisor: Benjamin
Master Seminar Report for Recent Trends in 3D Computer Vision Learning with Side Information through Modality Hallucination Judy Hoffman, Saurabh Gupta, Trevor Darrell. CVPR 2016 Nan Yang Supervisor: Benjamin
Mask R-CNN. presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma
 Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Mask R-CNN presented by Jiageng Zhang, Jingyao Zhan, Yunhan Ma Mask R-CNN Background Related Work Architecture Experiment Mask R-CNN Background Related Work Architecture Experiment Background From left
Multi-Glance Attention Models For Image Classification
 Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
Multi-Glance Attention Models For Image Classification Chinmay Duvedi Stanford University Stanford, CA cduvedi@stanford.edu Pararth Shah Stanford University Stanford, CA pararth@stanford.edu Abstract We
arxiv: v1 [cs.cv] 29 Mar 2018
![arxiv: v1 [cs.cv] 29 Mar 2018](/thumbs/77/76324907.jpg "arxiv: v1 [cs.cv] 29 Mar 2018") Structured Attention Guided Convolutional Neural Fields for Monocular Depth Estimation Dan Xu, Wei Wang, Hao Tang, Hong Liu 2, Nicu Sebe, Elisa Ricci,3 Multimedia and Human Understanding Group, University
Structured Attention Guided Convolutional Neural Fields for Monocular Depth Estimation Dan Xu, Wei Wang, Hao Tang, Hong Liu 2, Nicu Sebe, Elisa Ricci,3 Multimedia and Human Understanding Group, University
Lecture 5: Object Detection
 Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
Object Detection CSED703R: Deep Learning for Visual Recognition (2017F) Lecture 5: Object Detection Bohyung Han Computer Vision Lab. bhhan@postech.ac.kr 2 Traditional Object Detection Algorithms Region-based
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK. Wenjie Guan, YueXian Zou*, Xiaoqun Zhou
 MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
MULTI-SCALE OBJECT DETECTION WITH FEATURE FUSION AND REGION OBJECTNESS NETWORK Wenjie Guan, YueXian Zou*, Xiaoqun Zhou ADSPLAB/Intelligent Lab, School of ECE, Peking University, Shenzhen,518055, China
Spatial Localization and Detection. Lecture 8-1
 Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Lecture 8: Spatial Localization and Detection Lecture 8-1 Administrative - Project Proposals were due on Saturday Homework 2 due Friday 2/5 Homework 1 grades out this week Midterm will be in-class on Wednesday
Martian lava field, NASA, Wikipedia
 Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Martian lava field, NASA, Wikipedia Old Man of the Mountain, Franconia, New Hampshire Pareidolia http://smrt.ccel.ca/203/2/6/pareidolia/ Reddit for more : ) https://www.reddit.com/r/pareidolia/top/ Pareidolia
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation
 Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
Optimizing Intersection-Over-Union in Deep Neural Networks for Image Segmentation Md Atiqur Rahman and Yang Wang Department of Computer Science, University of Manitoba, Canada {atique, ywang}@cs.umanitoba.ca
Deep Neural Networks:
 Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Deep Neural Networks: Part II Convolutional Neural Network (CNN) Yuan-Kai Wang, 2016 Web site of this course: http://pattern-recognition.weebly.com source: CNN for ImageClassification, by S. Lazebnik,
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks
 Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Fast Semantic Segmentation of RGB-D Scenes with GPU-Accelerated Deep Neural Networks Nico Höft, Hannes Schulz, and Sven Behnke Rheinische Friedrich-Wilhelms-Universität Bonn Institut für Informatik VI,
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains
 Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
Supplementary Material for Zoom and Learn: Generalizing Deep Stereo Matching to Novel Domains Jiahao Pang 1 Wenxiu Sun 1 Chengxi Yang 1 Jimmy Ren 1 Ruichao Xiao 1 Jin Zeng 1 Liang Lin 1,2 1 SenseTime Research
SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks
 SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks John McCormac, Ankur Handa, Andrew Davison, and Stefan Leutenegger Dyson Robotics Lab, Imperial College London Abstract Ever
SemanticFusion: Dense 3D Semantic Mapping with Convolutional Neural Networks John McCormac, Ankur Handa, Andrew Davison, and Stefan Leutenegger Dyson Robotics Lab, Imperial College London Abstract Ever
Finding Tiny Faces Supplementary Materials
 Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Finding Tiny Faces Supplementary Materials Peiyun Hu, Deva Ramanan Robotics Institute Carnegie Mellon University {peiyunh,deva}@cs.cmu.edu 1. Error analysis Quantitative analysis We plot the distribution
Places Challenge 2017
 Places Challenge 2017 Scene Parsing Task CASIA_IVA_JD Jun Fu, Jing Liu, Longteng Guo, Haijie Tian, Fei Liu, Hanqing Lu Yong Li, Yongjun Bao, Weipeng Yan National Laboratory of Pattern Recognition, Institute
Places Challenge 2017 Scene Parsing Task CASIA_IVA_JD Jun Fu, Jing Liu, Longteng Guo, Haijie Tian, Fei Liu, Hanqing Lu Yong Li, Yongjun Bao, Weipeng Yan National Laboratory of Pattern Recognition, Institute
SURGE: Surface Regularized Geometry Estimation from a Single Image
 SURGE: Surface Regularized Geometry Estimation from a Single Image Peng Wang 1 Xiaohui Shen 2 Bryan Russell 2 Scott Cohen 2 Brian Price 2 Alan Yuille 3 1 University of California, Los Angeles 2 Adobe Research
SURGE: Surface Regularized Geometry Estimation from a Single Image Peng Wang 1 Xiaohui Shen 2 Bryan Russell 2 Scott Cohen 2 Brian Price 2 Alan Yuille 3 1 University of California, Los Angeles 2 Adobe Research
arxiv: v1 [cs.cv] 22 Jul 2014
![arxiv: v1 [cs.cv] 22 Jul 2014](/thumbs/82/86970964.jpg "arxiv: v1 [cs.cv] 22 Jul 2014") arxiv:1407.5736v1 [cs.cv] 22 Jul 2014 Learning Rich Features from RGB-D Images for Object Detection and Segmentation Saurabh Gupta 1, Ross Girshick 1, Pablo Arbeláez 1,2, and Jitendra Malik 1 {sgupta,
arxiv:1407.5736v1 [cs.cv] 22 Jul 2014 Learning Rich Features from RGB-D Images for Object Detection and Segmentation Saurabh Gupta 1, Ross Girshick 1, Pablo Arbeláez 1,2, and Jitendra Malik 1 {sgupta,
Kaggle Data Science Bowl 2017 Technical Report
 Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
Kaggle Data Science Bowl 2017 Technical Report qfpxfd Team May 11, 2017 1 Team Members Table 1: Team members Name E-Mail University Jia Ding dingjia@pku.edu.cn Peking University, Beijing, China Aoxue Li
Convolutional Networks in Scene Labelling
 Convolutional Networks in Scene Labelling Ashwin Paranjape Stanford ashwinpp@stanford.edu Ayesha Mudassir Stanford aysh@stanford.edu Abstract This project tries to address a well known problem of multi-class
Convolutional Networks in Scene Labelling Ashwin Paranjape Stanford ashwinpp@stanford.edu Ayesha Mudassir Stanford aysh@stanford.edu Abstract This project tries to address a well known problem of multi-class
arxiv: v2 [cs.cv] 19 Nov 2018
![arxiv: v2 [cs.cv] 19 Nov 2018](/thumbs/90/103457332.jpg "arxiv: v2 [cs.cv] 19 Nov 2018") OCNet: Object Context Network for Scene Parsing Yuhui Yuan Jingdong Wang Microsoft Research {yuyua,jingdw}@microsoft.com arxiv:1809.00916v2 [cs.cv] 19 Nov 2018 Abstract In this paper, we address the problem
OCNet: Object Context Network for Scene Parsing Yuhui Yuan Jingdong Wang Microsoft Research {yuyua,jingdw}@microsoft.com arxiv:1809.00916v2 [cs.cv] 19 Nov 2018 Abstract In this paper, we address the problem
Segmentation and Semantic Labeling of RGBD Data with Convolutional Neural Networks and Surface Fitting
 Segmentation and Semantic Labeling of RGBD Data with Convolutional Neural Networks and Surface Fitting Giampaolo Pagnutti 1,*, Ludovico Minto 1,*, Pietro Zanuttigh 1,*,** 1 Department of Information Engineering,
Segmentation and Semantic Labeling of RGBD Data with Convolutional Neural Networks and Surface Fitting Giampaolo Pagnutti 1,*, Ludovico Minto 1,*, Pietro Zanuttigh 1,*,** 1 Department of Information Engineering,
arxiv: v1 [cs.cv] 14 Dec 2015
![arxiv: v1 [cs.cv] 14 Dec 2015](/thumbs/72/67245194.jpg "arxiv: v1 [cs.cv] 14 Dec 2015") Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
Instance-aware Semantic Segmentation via Multi-task Network Cascades Jifeng Dai Kaiming He Jian Sun Microsoft Research {jifdai,kahe,jiansun}@microsoft.com arxiv:1512.04412v1 [cs.cv] 14 Dec 2015 Abstract
PAD-Net: Multi-Tasks Guided Prediction-and-Distillation Network for Simultaneous Depth Estimation and Scene Parsing
 PAD-Net: Multi-Tasks Guided Prediction-and-Distillation Network Simultaneous Depth Estimation and Scene Parsing Dan Xu 1, Wanli Ouyang 2, Xiaogang Wang 3, Nicu Sebe 1 1 The University of Trento, 2 The
PAD-Net: Multi-Tasks Guided Prediction-and-Distillation Network Simultaneous Depth Estimation and Scene Parsing Dan Xu 1, Wanli Ouyang 2, Xiaogang Wang 3, Nicu Sebe 1 1 The University of Trento, 2 The
Deep Incremental Scene Understanding. Federico Tombari & Christian Rupprecht Technical University of Munich, Germany
 Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Deep Incremental Scene Understanding Federico Tombari & Christian Rupprecht Technical University of Munich, Germany C. Couprie et al. "Toward Real-time Indoor Semantic Segmentation Using Depth Information"
Mask R-CNN. Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018
 Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for
Mask R-CNN Kaiming He, Georgia, Gkioxari, Piotr Dollar, Ross Girshick Presenters: Xiaokang Wang, Mengyao Shi Feb. 13, 2018 1 Common computer vision tasks Image Classification: one label is generated for