Airport Engineering Lectures
|
|
|
- Leslie Hicks
- 5 years ago
- Views:
Transcription


1 Basc Concepts I-4 Landng & Take-off Operatons Landng & Take-off Operatons 1. Landng. 2. Take Off. Runway Length Regulaton Requrements (FAR 25 & 21) 1
2 I-5 Runway Length Factors affectng R/W length Components: FS (full strength), CL (clearway), SW (stopway) Regulatons: Length for, - Normal T/O (FS & CL) - Engne falure T/O (FS & CL) - Engne falure aborted T/O (FS & SW) - Landng (FS) Determnaton of R/W length Notes: Crtcal Arcraft - wng span - Tre pressure, T/O weght - Heght - No. of passengers Calculaton of Runway Length (FAR 25 & 21) 2

3 Runway Length Balanced Feld Length Illustraton of Declared Dstances 3


4 Illustraton of Declared Dstances Determnaton of Declared Dstances 4
5 Basc Concepts I-5 Runway length 1. Factors Affectng Runway length 1. Arcraft Performance Characterstcs. 2. Landng & Take Off Gross Weghts of the Arcraft. 3. Arport Elevaton. 4. Maxmum Temperature. 5. Runway Gradent. 6. Runway Surface Condton. 2. Determnaton of Runway Length Basc Runway Length ISA (Internatonal Standard Atmosphere) -Sea Level. -Standard Temp. at Elevaton. -No Gradent. -Dry Surface. Requred Runway Length 2.1 Use of Arcraft Performance Curves & Charts (FAA/AC Manuals) a- For Landng e.g. fg 2.5 For Boeng seres b- For Take-Off -Landng Weght + Elevaton Runway Length Correct for wet surface + 5~9% -Take-Off Weght + Range + Temperature (Maxmum) +Elevaton Runway Length Correct for Gradent + 10% for each 1% Effectve Gradent. 5
6 -Landng Weght + Elevaton Runway Length Correct for wet surface (+ 5~9%) Clmb lmted weght 6
7 2.2 Correcton of Basc Runway length for local condtons L landng = L B landng Fe F w L TO = L B TO Fe Ft Fg Only for Runway Codes 2,3,4 LB: Basc Length Requred for the Crtcal Arcraft at Standard Atmosphere of Temp (ISA). Fe= 0.07 E/ Where E = Arport Elevaton (m) Ft= 0.01 [ To ( (E)) ] + 1 T0 = Reference Temp (ºC). Fg = (0.10 G + 1) Monthly Mean of the Daly Max Temp for the Hottest Month. Where G= Effectve Runway Gradent = ( h/l) 100 F w = 1.05~1.09 7
8 8
9 9
10 10
 4.")
11 I-6 Settng out of Runway Orentatons 1. Factors Affectng Runway Orentaton 1. Maxmum Allowable Crosswnd (Trackng) 2. Prevalng Wnd Velocty & Drectons 11.5 mph for lght arcrafts 15 mph for medum arcrafts 23 mph for heavy arcrafts 3. Usablty Factor (Usually 95% mn) 4. Wnd Data True North Prmary R/W Crosswnd R/W Magnetc North Runway Orentaton - May use One Prmary R/W & One Cross Wnd R/W to Cover Requred Usablty Factor. 11
12 2. Runway Orentaton Usng the Wnd Rose Technque 12


13 I-7 Runway Numberng (Desgnaton) 13
14 I-8 Arport Reference Pont (ARP) The Geometrc Center of the Aerodrome. Needed for all Aerodromes (to be reported n the AIP). Identfes the Locaton of the Arport n the X-Y Plan. It s the center of the runway for arports wth a sngle runway. X = X L L Y = Y L L RW1 X 1, Y 1, L 1 ARP X 2, Y 2, L 2 RW2 X3, Y3, L3 RW3 I-9 Establshed Arport Elevaton. Control Pont for Elevaton (Z Drecton). Hghest Elevaton on the R/W CL. Measured and Gven to the Nearest Meter. The Hghest Hgh Pont n the Case of Many R/Ws. 14


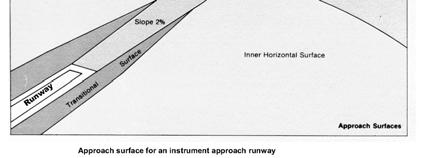
15 I-10 Obstacle Lmtaton Surface Purpose: An Imagnary Surface Defnng the Maxmum Allowable Obstacle Heghts n the Vcnty of the Arport so as to Ensure Clear Navgaton Arspace. Obstacles nclude: Buldng Objects, Natural Objects of Terran Obstacle Lmtaton Surface Components Prmary Surface Horzontal Surface See Table 2.8 for ICAO Standards Concal Surface Approach Surface/ Take-Off clmb. Transtonal Surface 15



16 16

17 17
18 18


19 19
Flight Testing of Nap-of-the-Earth Unmanned Helicopter Systems
 Flght Testng of Nap-of-the-Earth Unmanned Helcopter Systems Erc N. Johnson, John G. Mooney, Chester Ong erc.johnson@ae.gatech.edu john.g.mooney@gatech.edu gtg77@mal.gatech.edu Lockheed Martn Assocate Graduate
Flght Testng of Nap-of-the-Earth Unmanned Helcopter Systems Erc N. Johnson, John G. Mooney, Chester Ong erc.johnson@ae.gatech.edu john.g.mooney@gatech.edu gtg77@mal.gatech.edu Lockheed Martn Assocate Graduate
High Performance Nap of-the-earth Unmanned Helicopter Flight
 Hgh Performance Nap of-the-earth Unmanned Helcopter Flght Erc N. Johnson, John G. Mooney, Chester Ong erc.johnson@ae.gatech.edu john.g.mooney@gatech.edu gtg77@mal.gatech.edu Lockheed Martn Assocate Graduate
Hgh Performance Nap of-the-earth Unmanned Helcopter Flght Erc N. Johnson, John G. Mooney, Chester Ong erc.johnson@ae.gatech.edu john.g.mooney@gatech.edu gtg77@mal.gatech.edu Lockheed Martn Assocate Graduate
Active Contours/Snakes
 Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
Actve Contours/Snakes Erkut Erdem Acknowledgement: The sldes are adapted from the sldes prepared by K. Grauman of Unversty of Texas at Austn Fttng: Edges vs. boundares Edges useful sgnal to ndcate occludng
DESIGN OF VERTICAL ALIGNMET
 DESIN OF VERTICAL ALINMET Longtudnal gradent : max 0,5% (max see the assgnment paper) Markng of longtudnal gradent n drecton of chanage: + [%].. ascent n the drecton of chanage [%].. descent n the drecton
DESIN OF VERTICAL ALINMET Longtudnal gradent : max 0,5% (max see the assgnment paper) Markng of longtudnal gradent n drecton of chanage: + [%].. ascent n the drecton of chanage [%].. descent n the drecton
Lobachevsky State University of Nizhni Novgorod. Polyhedron. Quick Start Guide
 Lobachevsky State Unversty of Nzhn Novgorod Polyhedron Quck Start Gude Nzhn Novgorod 2016 Contents Specfcaton of Polyhedron software... 3 Theoretcal background... 4 1. Interface of Polyhedron... 6 1.1.
Lobachevsky State Unversty of Nzhn Novgorod Polyhedron Quck Start Gude Nzhn Novgorod 2016 Contents Specfcaton of Polyhedron software... 3 Theoretcal background... 4 1. Interface of Polyhedron... 6 1.1.
FEATURE EXTRACTION. Dr. K.Vijayarekha. Associate Dean School of Electrical and Electronics Engineering SASTRA University, Thanjavur
 FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
FEATURE EXTRACTION Dr. K.Vjayarekha Assocate Dean School of Electrcal and Electroncs Engneerng SASTRA Unversty, Thanjavur613 41 Jont Intatve of IITs and IISc Funded by MHRD Page 1 of 8 Table of Contents
Content Based Image Retrieval Using 2-D Discrete Wavelet with Texture Feature with Different Classifiers
 IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
IOSR Journal of Electroncs and Communcaton Engneerng (IOSR-JECE) e-issn: 78-834,p- ISSN: 78-8735.Volume 9, Issue, Ver. IV (Mar - Apr. 04), PP 0-07 Content Based Image Retreval Usng -D Dscrete Wavelet wth
Air Transport Demand. Ta-Hui Yang Associate Professor Department of Logistics Management National Kaohsiung First Univ. of Sci. & Tech.
 Ar Transport Demand Ta-Hu Yang Assocate Professor Department of Logstcs Management Natonal Kaohsung Frst Unv. of Sc. & Tech. 1 Ar Transport Demand Demand for ar transport between two ctes or two regons
Ar Transport Demand Ta-Hu Yang Assocate Professor Department of Logstcs Management Natonal Kaohsung Frst Unv. of Sc. & Tech. 1 Ar Transport Demand Demand for ar transport between two ctes or two regons
SLAM Summer School 2006 Practical 2: SLAM using Monocular Vision
 SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
SLAM Summer School 2006 Practcal 2: SLAM usng Monocular Vson Javer Cvera, Unversty of Zaragoza Andrew J. Davson, Imperal College London J.M.M Montel, Unversty of Zaragoza. josemar@unzar.es, jcvera@unzar.es,
Computation of Ex-Core Detector Weighting Functions for VVER-440 Using MCNP5
 Computaton of Ex-Core Detector Weghtng Functons for VVER-440 Usng MCNP5 Gabrel Farkas, Jozef Lpka, Ján Haščík, Vladmír Slugeň Slovak Unversty of Technology, Faculty of Electrcal Engneerng and Informaton
Computaton of Ex-Core Detector Weghtng Functons for VVER-440 Usng MCNP5 Gabrel Farkas, Jozef Lpka, Ján Haščík, Vladmír Slugeň Slovak Unversty of Technology, Faculty of Electrcal Engneerng and Informaton
VISUAL SELECTION OF SURFACE FEATURES DURING THEIR GEOMETRIC SIMULATION WITH THE HELP OF COMPUTER TECHNOLOGIES
 UbCC 2011, Volume 6, 5002981-x manuscrpts OPEN ACCES UbCC Journal ISSN 1992-8424 www.ubcc.org VISUAL SELECTION OF SURFACE FEATURES DURING THEIR GEOMETRIC SIMULATION WITH THE HELP OF COMPUTER TECHNOLOGIES
UbCC 2011, Volume 6, 5002981-x manuscrpts OPEN ACCES UbCC Journal ISSN 1992-8424 www.ubcc.org VISUAL SELECTION OF SURFACE FEATURES DURING THEIR GEOMETRIC SIMULATION WITH THE HELP OF COMPUTER TECHNOLOGIES
Finite Element Analysis of Rubber Sealing Ring Resilience Behavior Qu Jia 1,a, Chen Geng 1,b and Yang Yuwei 2,c
 Advanced Materals Research Onlne: 03-06-3 ISSN: 66-8985, Vol. 705, pp 40-44 do:0.408/www.scentfc.net/amr.705.40 03 Trans Tech Publcatons, Swtzerland Fnte Element Analyss of Rubber Sealng Rng Reslence Behavor
Advanced Materals Research Onlne: 03-06-3 ISSN: 66-8985, Vol. 705, pp 40-44 do:0.408/www.scentfc.net/amr.705.40 03 Trans Tech Publcatons, Swtzerland Fnte Element Analyss of Rubber Sealng Rng Reslence Behavor
Filling level and Temperature Sensor HFT C4 / R / MD
 Fllng level and Temperature Sensor HFT C4 / R / MD Level measurng range 0.25-5.0 m Pressure measurng range 0-0.5 bar Temperature measurng range -10 100 C Voltage supply 18 30 V DC Features Fllng level
Fllng level and Temperature Sensor HFT C4 / R / MD Level measurng range 0.25-5.0 m Pressure measurng range 0-0.5 bar Temperature measurng range -10 100 C Voltage supply 18 30 V DC Features Fllng level
Image Representation & Visualization Basic Imaging Algorithms Shape Representation and Analysis. outline
 mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
mage Vsualzaton mage Vsualzaton mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and Analyss outlne mage Representaton & Vsualzaton Basc magng Algorthms Shape Representaton and
UrbaWind, a Computational Fluid Dynamics tool to predict wind resource in urban area
 UrbaWnd, a Computatonal Flud Dynamcs tool to predct wnd resource n urban area Karm FAHSSIS a, Gullaume DUPONT a, Perre LEYRONNAS a a Meteodyn, Nantes, France Presentng Author: Karm.fahsss@meteodyn.com,
UrbaWnd, a Computatonal Flud Dynamcs tool to predct wnd resource n urban area Karm FAHSSIS a, Gullaume DUPONT a, Perre LEYRONNAS a a Meteodyn, Nantes, France Presentng Author: Karm.fahsss@meteodyn.com,
Quick error verification of portable coordinate measuring arm
 Quck error verfcaton of portable coordnate measurng arm J.F. Ouang, W.L. Lu, X.H. Qu State Ke Laborator of Precson Measurng Technolog and Instruments, Tanjn Unverst, Tanjn 7, Chna Tel.: + 86 [] 7-8-99
Quck error verfcaton of portable coordnate measurng arm J.F. Ouang, W.L. Lu, X.H. Qu State Ke Laborator of Precson Measurng Technolog and Instruments, Tanjn Unverst, Tanjn 7, Chna Tel.: + 86 [] 7-8-99
RAP. Speed/RAP/CODA. Real-time Systems. Modeling the sensor networks. Real-time Systems. Modeling the sensor networks. Real-time systems:
 Speed/RAP/CODA Presented by Octav Chpara Real-tme Systems Many wreless sensor network applcatons requre real-tme support Survellance and trackng Border patrol Fre fghtng Real-tme systems: Hard real-tme:
Speed/RAP/CODA Presented by Octav Chpara Real-tme Systems Many wreless sensor network applcatons requre real-tme support Survellance and trackng Border patrol Fre fghtng Real-tme systems: Hard real-tme:
Fitting: Deformable contours April 26 th, 2018
 4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
4/6/08 Fttng: Deformable contours Aprl 6 th, 08 Yong Jae Lee UC Davs Recap so far: Groupng and Fttng Goal: move from array of pxel values (or flter outputs) to a collecton of regons, objects, and shapes.
Subspace clustering. Clustering. Fundamental to all clustering techniques is the choice of distance measure between data points;
 Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
Subspace clusterng Clusterng Fundamental to all clusterng technques s the choce of dstance measure between data ponts; D q ( ) ( ) 2 x x = x x, j k = 1 k jk Squared Eucldean dstance Assumpton: All features
An efficient method to build panoramic image mosaics
 An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
An effcent method to buld panoramc mage mosacs Pattern Recognton Letters vol. 4 003 Dae-Hyun Km Yong-In Yoon Jong-Soo Cho School of Electrcal Engneerng and Computer Scence Kyungpook Natonal Unv. Abstract
Chapter 9. Model Calibration. John Hourdakis Center for Transportation Studies, U of Mn
 Chapter 9 Model Calbraton John Hourdaks Center for Transportaton Studes, U of Mn Hourd00@tc.umn.edu Why Calbrate? Computers Cannot Magcally Replcate Realty! Smulaton Models Are Desgned to be General Drver
Chapter 9 Model Calbraton John Hourdaks Center for Transportaton Studes, U of Mn Hourd00@tc.umn.edu Why Calbrate? Computers Cannot Magcally Replcate Realty! Smulaton Models Are Desgned to be General Drver
IMRT workflow. Optimization and Inverse planning. Intensity distribution IMRT IMRT. Dose optimization for IMRT. Bram van Asselen
 IMRT workflow Otmzaton and Inverse lannng 69 Gy Bram van Asselen IMRT Intensty dstrbuton Webb 003: IMRT s the delvery of radaton to the atent va felds that have non-unform radaton fluence Purose: Fnd a
IMRT workflow Otmzaton and Inverse lannng 69 Gy Bram van Asselen IMRT Intensty dstrbuton Webb 003: IMRT s the delvery of radaton to the atent va felds that have non-unform radaton fluence Purose: Fnd a
Conditional Speculative Decimal Addition*
 Condtonal Speculatve Decmal Addton Alvaro Vazquez and Elsardo Antelo Dep. of Electronc and Computer Engneerng Unv. of Santago de Compostela, Span Ths work was supported n part by Xunta de Galca under grant
Condtonal Speculatve Decmal Addton Alvaro Vazquez and Elsardo Antelo Dep. of Electronc and Computer Engneerng Unv. of Santago de Compostela, Span Ths work was supported n part by Xunta de Galca under grant
3-Wheel Swerve Drive - The Trouble with Tribots
 3-Wheel Swerve Drve - The Trouble wth Trbots Clem McKown - FRC Team 1640 17-August-2014 Executve Summary FRC's 2013 change n robot permeter rules (to 112 nch maxmum overall permeter from the earler maxmum
3-Wheel Swerve Drve - The Trouble wth Trbots Clem McKown - FRC Team 1640 17-August-2014 Executve Summary FRC's 2013 change n robot permeter rules (to 112 nch maxmum overall permeter from the earler maxmum
Wireless Temperature Monitoring Overview
 Wreless Temperature Montorng Overvew Wreless Temperature Montorng and Alerts. Your Dashboard gves you advanced montorng, alerts (SMS or Emals), graphng and PDF reports from anywhere n the world. Product
Wreless Temperature Montorng Overvew Wreless Temperature Montorng and Alerts. Your Dashboard gves you advanced montorng, alerts (SMS or Emals), graphng and PDF reports from anywhere n the world. Product
Biostatistics 615/815
 The E-M Algorthm Bostatstcs 615/815 Lecture 17 Last Lecture: The Smplex Method General method for optmzaton Makes few assumptons about functon Crawls towards mnmum Some recommendatons Multple startng ponts
The E-M Algorthm Bostatstcs 615/815 Lecture 17 Last Lecture: The Smplex Method General method for optmzaton Makes few assumptons about functon Crawls towards mnmum Some recommendatons Multple startng ponts
Electrical analysis of light-weight, triangular weave reflector antennas
 Electrcal analyss of lght-weght, trangular weave reflector antennas Knud Pontoppdan TICRA Laederstraede 34 DK-121 Copenhagen K Denmark Emal: kp@tcra.com INTRODUCTION The new lght-weght reflector antenna
Electrcal analyss of lght-weght, trangular weave reflector antennas Knud Pontoppdan TICRA Laederstraede 34 DK-121 Copenhagen K Denmark Emal: kp@tcra.com INTRODUCTION The new lght-weght reflector antenna
Hierarchical clustering for gene expression data analysis
 Herarchcal clusterng for gene expresson data analyss Gorgo Valentn e-mal: valentn@ds.unm.t Clusterng of Mcroarray Data. Clusterng of gene expresson profles (rows) => dscovery of co-regulated and functonally
Herarchcal clusterng for gene expresson data analyss Gorgo Valentn e-mal: valentn@ds.unm.t Clusterng of Mcroarray Data. Clusterng of gene expresson profles (rows) => dscovery of co-regulated and functonally
Multi-view 3D Position Estimation of Sports Players
 Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
Mult-vew 3D Poston Estmaton of Sports Players Robbe Vos and Wlle Brnk Appled Mathematcs Department of Mathematcal Scences Unversty of Stellenbosch, South Afrca Emal: vosrobbe@gmal.com Abstract The problem
STUDY OF WAKE REGION BEHIND OF ISOLATED CUBIC BUILDING.PART II: NUMERICAL SIMULATIONS
 Proceedngs of ENCIT 2012 Copyrght 2012 by ABCM 14 th Brazlan Congress of Thermal Scences and Engneerng November 18-22, 2012, Ro de Janero, RJ, Brazl STUDY OF WAKE REGION BEHIND OF ISOLATED CUBIC BUILDING.PART
Proceedngs of ENCIT 2012 Copyrght 2012 by ABCM 14 th Brazlan Congress of Thermal Scences and Engneerng November 18-22, 2012, Ro de Janero, RJ, Brazl STUDY OF WAKE REGION BEHIND OF ISOLATED CUBIC BUILDING.PART
R s s f. m y s. SPH3UW Unit 7.3 Spherical Concave Mirrors Page 1 of 12. Notes
 SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
SPH3UW Unt 7.3 Sphercal Concave Mrrors Page 1 of 1 Notes Physcs Tool box Concave Mrror If the reflectng surface takes place on the nner surface of the sphercal shape so that the centre of the mrror bulges
RIGOROUS GENERATION OF DIGITAL ORTHOPHOTOS FROM EROS A HIGH RESOLUTION SATELLITE IMAGES
 ISPRS SIPT IGU UCI CIG ACSG Table of contents Table des matères Authors ndex Index des auteurs Search Recherches Ext Sortr RIGOROUS GENERATION OF DIGITAL ORTHOPHOTOS FROM EROS A HIGH RESOLUTION SATELLITE
ISPRS SIPT IGU UCI CIG ACSG Table of contents Table des matères Authors ndex Index des auteurs Search Recherches Ext Sortr RIGOROUS GENERATION OF DIGITAL ORTHOPHOTOS FROM EROS A HIGH RESOLUTION SATELLITE
The Evaluation and Correction of the Reconstructed NURBS Surface Smoothing and Accuracy
 Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com The Evaluaton and Correcton of the Reconstructed NURBS Surface Smoothng and Accuracy Shgang WANG, Janzhou ZHANG, Yong YAN School of Mechatroncs
Sensors & Transducers 2013 by IFSA http://www.sensorsportal.com The Evaluaton and Correcton of the Reconstructed NURBS Surface Smoothng and Accuracy Shgang WANG, Janzhou ZHANG, Yong YAN School of Mechatroncs
Support Vector Machines
 /9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
/9/207 MIST.6060 Busness Intellgence and Data Mnng What are Support Vector Machnes? Support Vector Machnes Support Vector Machnes (SVMs) are supervsed learnng technques that analyze data and recognze patterns.
Multi-posture kinematic calibration technique and parameter identification algorithm for articulated arm coordinate measuring machines
 Mult-posture knematc calbraton technque and parameter dentfcaton algorthm for artculated arm coordnate measurng machnes Juan-José AGUILAR, Jorge SANTOLARIA, José-Antono YAGÜE, Ana-Crstna MAJARENA Department
Mult-posture knematc calbraton technque and parameter dentfcaton algorthm for artculated arm coordnate measurng machnes Juan-José AGUILAR, Jorge SANTOLARIA, José-Antono YAGÜE, Ana-Crstna MAJARENA Department
Dynamic wetting property investigation of AFM tips in micro/nanoscale
 Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Dynamc wettng property nvestgaton of AFM tps n mcro/nanoscale The wettng propertes of AFM probe tps are of concern n AFM tp related force measurement, fabrcaton, and manpulaton technques, such as dp-pen
Design of Structure Optimization with APDL
 Desgn of Structure Optmzaton wth APDL Yanyun School of Cvl Engneerng and Archtecture, East Chna Jaotong Unversty Nanchang 330013 Chna Abstract In ths paper, the desgn process of structure optmzaton wth
Desgn of Structure Optmzaton wth APDL Yanyun School of Cvl Engneerng and Archtecture, East Chna Jaotong Unversty Nanchang 330013 Chna Abstract In ths paper, the desgn process of structure optmzaton wth
Keyword-based Document Clustering
 Keyword-based ocument lusterng Seung-Shk Kang School of omputer Scence Kookmn Unversty & AIrc hungnung-dong Songbuk-gu Seoul 36-72 Korea sskang@kookmn.ac.kr Abstract ocument clusterng s an aggregaton of
Keyword-based ocument lusterng Seung-Shk Kang School of omputer Scence Kookmn Unversty & AIrc hungnung-dong Songbuk-gu Seoul 36-72 Korea sskang@kookmn.ac.kr Abstract ocument clusterng s an aggregaton of
Efficient Distributed File System (EDFS)
") Effcent Dstrbuted Fle System (EDFS) (Sem-Centralzed) Debessay(Debsh) Fesehaye, Rahul Malk & Klara Naherstedt Unversty of Illnos-Urbana Champagn Contents Problem Statement, Related Work, EDFS Desgn Rate
Effcent Dstrbuted Fle System (EDFS) (Sem-Centralzed) Debessay(Debsh) Fesehaye, Rahul Malk & Klara Naherstedt Unversty of Illnos-Urbana Champagn Contents Problem Statement, Related Work, EDFS Desgn Rate
CS 534: Computer Vision Model Fitting
 CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
CS 534: Computer Vson Model Fttng Sprng 004 Ahmed Elgammal Dept of Computer Scence CS 534 Model Fttng - 1 Outlnes Model fttng s mportant Least-squares fttng Maxmum lkelhood estmaton MAP estmaton Robust
REFRACTION. a. To study the refraction of light from plane surfaces. b. To determine the index of refraction for Acrylic and Water.
 Purpose Theory REFRACTION a. To study the refracton of lght from plane surfaces. b. To determne the ndex of refracton for Acrylc and Water. When a ray of lght passes from one medum nto another one of dfferent
Purpose Theory REFRACTION a. To study the refracton of lght from plane surfaces. b. To determne the ndex of refracton for Acrylc and Water. When a ray of lght passes from one medum nto another one of dfferent
ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR
 ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR A. Wendt a, C. Dold b a Insttute for Appled Photogrammetry and Geonformatcs, Unversty of Appled
ESTIMATION OF INTERIOR ORIENTATION AND ECCENTRICITY PARAMETERS OF A HYBRID IMAGING AND LASER SCANNING SENSOR A. Wendt a, C. Dold b a Insttute for Appled Photogrammetry and Geonformatcs, Unversty of Appled
3D Shape of Specular Surface Measurement Using Five Degrees of Freedom Camera System
 Khar usuf, Prasetyo Ed, Amr Radz Abdul Ghan 3D Shape of Specular Measurement Usng Fve Degrees of Freedom Camera System KHAIRI USUF, PRASETO EDI and AMIR RADI ABDUL GHANI Department of Engneerng Desgn and
Khar usuf, Prasetyo Ed, Amr Radz Abdul Ghan 3D Shape of Specular Measurement Usng Fve Degrees of Freedom Camera System KHAIRI USUF, PRASETO EDI and AMIR RADI ABDUL GHANI Department of Engneerng Desgn and
High-Boost Mesh Filtering for 3-D Shape Enhancement
 Hgh-Boost Mesh Flterng for 3-D Shape Enhancement Hrokazu Yagou Λ Alexander Belyaev y Damng We z Λ y z ; ; Shape Modelng Laboratory, Unversty of Azu, Azu-Wakamatsu 965-8580 Japan y Computer Graphcs Group,
Hgh-Boost Mesh Flterng for 3-D Shape Enhancement Hrokazu Yagou Λ Alexander Belyaev y Damng We z Λ y z ; ; Shape Modelng Laboratory, Unversty of Azu, Azu-Wakamatsu 965-8580 Japan y Computer Graphcs Group,
5th International Workshop on Biological Effects of Electromagnetic Fields. September 28th - October 2nd 2008, Città del Mare, Terrasini, Palermo
 5th Internatonal Workshop on Bologcal Effects of Electromagnetc Felds September 28th - October 2nd 2008, Cttà del Mare, Terrasn, Palermo COMPLIANCE WITH EU BASIC RESTRICTIONS NEAR INDUCTION FURNACES USED
5th Internatonal Workshop on Bologcal Effects of Electromagnetc Felds September 28th - October 2nd 2008, Cttà del Mare, Terrasn, Palermo COMPLIANCE WITH EU BASIC RESTRICTIONS NEAR INDUCTION FURNACES USED
Predator-Prey Pigeon-Inspired Optimization for UAV Three-Dimensional Path Planning
 Predator-Prey Pgeon-Inspred Optmzaton for UAV Three-Dmensonal Path Plannng Bo Zhang 1 and Habn Duan 1,2,* 1 Scence and Technology on Arcraft Control Laboratory, School of Automaton Scence and Electrcal
Predator-Prey Pgeon-Inspred Optmzaton for UAV Three-Dmensonal Path Plannng Bo Zhang 1 and Habn Duan 1,2,* 1 Scence and Technology on Arcraft Control Laboratory, School of Automaton Scence and Electrcal
Multi-objective optimization method for the ATO system using Cellular Automata
 Computers n Ralways XI 173 Mult-objectve optmzaton method for the ATO system usng Cellular Automata J. Xun, B. Nng & K. P. L The Key State Laboratory of Ral Traffc Control and Safety, Bejng Jaotong Unversty,
Computers n Ralways XI 173 Mult-objectve optmzaton method for the ATO system usng Cellular Automata J. Xun, B. Nng & K. P. L The Key State Laboratory of Ral Traffc Control and Safety, Bejng Jaotong Unversty,
RESISTIVE CIRCUITS MULTI NODE/LOOP CIRCUIT ANALYSIS
 RESSTE CRCUTS MULT NODE/LOOP CRCUT ANALYSS DEFNNG THE REFERENCE NODE S TAL 4 THESTATEMENT 4 S MEANNGLES UNTL THE REFERENCE PONT S DEFNED BY CONENTON THE GROUND SYMBOL SPECFES THE REFERENCE PONT. ALL NODE
RESSTE CRCUTS MULT NODE/LOOP CRCUT ANALYSS DEFNNG THE REFERENCE NODE S TAL 4 THESTATEMENT 4 S MEANNGLES UNTL THE REFERENCE PONT S DEFNED BY CONENTON THE GROUND SYMBOL SPECFES THE REFERENCE PONT. ALL NODE
3D vector computer graphics
 3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
3D vector computer graphcs Paolo Varagnolo: freelance engneer Padova Aprl 2016 Prvate Practce ----------------------------------- 1. Introducton Vector 3D model representaton n computer graphcs requres
MODELING THE CONDITION OF BUILDINGS BY REAL FUZZY SETS
 Int. Journal for Housng Scence, Vol.38, No.1 pp.13-23, 2014 Publshed n the Unted States MODELING THE CONDITION OF BUILDINGS BY REAL FUZZY SETS Ádám BUKOVICS Szécheny István Unversty Department of Structural
Int. Journal for Housng Scence, Vol.38, No.1 pp.13-23, 2014 Publshed n the Unted States MODELING THE CONDITION OF BUILDINGS BY REAL FUZZY SETS Ádám BUKOVICS Szécheny István Unversty Department of Structural
Proper Choice of Data Used for the Estimation of Datum Transformation Parameters
 Proper Choce of Data Used for the Estmaton of Datum Transformaton Parameters Hakan S. KUTOGLU, Turkey Key words: Coordnate systems; transformaton; estmaton, relablty. SUMMARY Advances n technologes and
Proper Choce of Data Used for the Estmaton of Datum Transformaton Parameters Hakan S. KUTOGLU, Turkey Key words: Coordnate systems; transformaton; estmaton, relablty. SUMMARY Advances n technologes and
Dependence of the Color Rendering Index on the Luminance of Light Sources and Munsell Samples
 Australan Journal of Basc and Appled Scences, 4(10): 4609-4613, 2010 ISSN 1991-8178 Dependence of the Color Renderng Index on the Lumnance of Lght Sources and Munsell Samples 1 A. EL-Bally (Physcs Department),
Australan Journal of Basc and Appled Scences, 4(10): 4609-4613, 2010 ISSN 1991-8178 Dependence of the Color Renderng Index on the Lumnance of Lght Sources and Munsell Samples 1 A. EL-Bally (Physcs Department),
Improvement of Spatial Resolution Using BlockMatching Based Motion Estimation and Frame. Integration
 Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Improvement of Spatal Resoluton Usng BlockMatchng Based Moton Estmaton and Frame Integraton Danya Suga and Takayuk Hamamoto Graduate School of Engneerng, Tokyo Unversty of Scence, 6-3-1, Nuku, Katsuska-ku,
Program-algorithm complex for image imposition in aircraft vision systems
 Program-algorthm complex for mage mposton n arcraft vson systems А.I. Efmov 1, А.I. Novkov 1 1 Ryazan State Rado Engnerng Unversty, Ryazan, 390005, Russa Abstract One of the most mportant tasks beng solvable
Program-algorthm complex for mage mposton n arcraft vson systems А.I. Efmov 1, А.I. Novkov 1 1 Ryazan State Rado Engnerng Unversty, Ryazan, 390005, Russa Abstract One of the most mportant tasks beng solvable
Wishing you all a Total Quality New Year!
 Total Qualty Management and Sx Sgma Post Graduate Program 214-15 Sesson 4 Vnay Kumar Kalakband Assstant Professor Operatons & Systems Area 1 Wshng you all a Total Qualty New Year! Hope you acheve Sx sgma
Total Qualty Management and Sx Sgma Post Graduate Program 214-15 Sesson 4 Vnay Kumar Kalakband Assstant Professor Operatons & Systems Area 1 Wshng you all a Total Qualty New Year! Hope you acheve Sx sgma
ASPECTS ON THE COLD BPM S IN THE MAIN LINAC
 http://www.fnal.gov ASPECTS ON THE COLD BPM S IN THE MAIN LINAC 1. Resoluton 2. Resoluton 3. Resoluton 4.... Manfred Wendt, Fermlab manfred@fnal.gov 1/15 < > Contents INTRODUCTION BPM ASPECTS CANDIDATES
http://www.fnal.gov ASPECTS ON THE COLD BPM S IN THE MAIN LINAC 1. Resoluton 2. Resoluton 3. Resoluton 4.... Manfred Wendt, Fermlab manfred@fnal.gov 1/15 < > Contents INTRODUCTION BPM ASPECTS CANDIDATES
BioTechnology. An Indian Journal FULL PAPER. Trade Science Inc.
 [Type text] [Type text] [Type text] ISSN : 0974-74 Volume 0 Issue BoTechnology 04 An Indan Journal FULL PAPER BTAIJ 0() 04 [684-689] Revew on Chna s sports ndustry fnancng market based on market -orented
[Type text] [Type text] [Type text] ISSN : 0974-74 Volume 0 Issue BoTechnology 04 An Indan Journal FULL PAPER BTAIJ 0() 04 [684-689] Revew on Chna s sports ndustry fnancng market based on market -orented
Image Fusion With a Dental Panoramic X-ray Image and Face Image Acquired With a KINECT
 Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry,
Image Fuson Wth a Dental Panoramc X-ray Image and Face Image Acqured Wth a KINECT Kohe Kawa* 1, Koch Ogawa* 1, Aktosh Katumata* 2 * 1 Graduate School of Engneerng, Hose Unversty * 2 School of Dentstry,
User Authentication Based On Behavioral Mouse Dynamics Biometrics
 User Authentcaton Based On Behavoral Mouse Dynamcs Bometrcs Chee-Hyung Yoon Danel Donghyun Km Department of Computer Scence Department of Computer Scence Stanford Unversty Stanford Unversty Stanford, CA
User Authentcaton Based On Behavoral Mouse Dynamcs Bometrcs Chee-Hyung Yoon Danel Donghyun Km Department of Computer Scence Department of Computer Scence Stanford Unversty Stanford Unversty Stanford, CA
A Gradient Difference based Technique for Video Text Detection
 A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng, Natonal Unversty of Sngapore {shva, phanquyt, tancl }@comp.nus.edu.sg
A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng, Natonal Unversty of Sngapore {shva, phanquyt, tancl }@comp.nus.edu.sg
Virtual Machine Migration based on Trust Measurement of Computer Node
 Appled Mechancs and Materals Onlne: 2014-04-04 ISSN: 1662-7482, Vols. 536-537, pp 678-682 do:10.4028/www.scentfc.net/amm.536-537.678 2014 Trans Tech Publcatons, Swtzerland Vrtual Machne Mgraton based on
Appled Mechancs and Materals Onlne: 2014-04-04 ISSN: 1662-7482, Vols. 536-537, pp 678-682 do:10.4028/www.scentfc.net/amm.536-537.678 2014 Trans Tech Publcatons, Swtzerland Vrtual Machne Mgraton based on
Autonomous Exploration in Unknown Urban Environments for Unmanned Aerial Vehicles
 Autonomous Exploraton n Unknown Urban Envronments for Unmanned Aeral Vehcles Davd Hyunchul hm * and Hoam Chung Unversty of Calforna, Berkeley, CA, 9470 H. Jn Km eoul Natonal Unversty, eoul, Korea and hankar
Autonomous Exploraton n Unknown Urban Envronments for Unmanned Aeral Vehcles Davd Hyunchul hm * and Hoam Chung Unversty of Calforna, Berkeley, CA, 9470 H. Jn Km eoul Natonal Unversty, eoul, Korea and hankar
Outline. Seamless Image Stitching in the Gradient Domain. Related Approaches. Image Stitching. Introduction Related Work
 Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
Outlne Seamless Image Sttchng n the Gradent Doman Anat Levn, Assaf Zomet, Shmuel Peleg and Yar Wess ECCV 004 Presenter: Pn Wu Oct 007 Introducton Related Work GIST: Gradent-doman Image Sttchng GIST GIST
LOOP ANALYSIS. The second systematic technique to determine all currents and voltages in a circuit
 LOOP ANALYSS The second systematic technique to determine all currents and voltages in a circuit T S DUAL TO NODE ANALYSS - T FRST DETERMNES ALL CURRENTS N A CRCUT AND THEN T USES OHM S LAW TO COMPUTE
LOOP ANALYSS The second systematic technique to determine all currents and voltages in a circuit T S DUAL TO NODE ANALYSS - T FRST DETERMNES ALL CURRENTS N A CRCUT AND THEN T USES OHM S LAW TO COMPUTE
A Gradient Difference based Technique for Video Text Detection
 2009 10th Internatonal Conference on Document Analyss and Recognton A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng,
2009 10th Internatonal Conference on Document Analyss and Recognton A Gradent Dfference based Technque for Vdeo Text Detecton Palaahnakote Shvakumara, Trung Quy Phan and Chew Lm Tan School of Computng,
Slide 1 SPH3UW: OPTICS I. Slide 2. Slide 3. Introduction to Mirrors. Light incident on an object
 Slde 1 SPH3UW: OPTICS I Introducton to Mrrors Slde 2 Lght ncdent on an object Absorpton Relecton (bounces)** See t Mrrors Reracton (bends) Lenses Oten some o each Everythng true or wavelengths
Slde 1 SPH3UW: OPTICS I Introducton to Mrrors Slde 2 Lght ncdent on an object Absorpton Relecton (bounces)** See t Mrrors Reracton (bends) Lenses Oten some o each Everythng true or wavelengths
Review of approximation techniques
 CHAPTER 2 Revew of appromaton technques 2. Introducton Optmzaton problems n engneerng desgn are characterzed by the followng assocated features: the objectve functon and constrants are mplct functons evaluated
CHAPTER 2 Revew of appromaton technques 2. Introducton Optmzaton problems n engneerng desgn are characterzed by the followng assocated features: the objectve functon and constrants are mplct functons evaluated
Design of a Real Time FPGA-based Three Dimensional Positioning Algorithm
 Desgn of a Real Tme FPGA-based Three Dmensonal Postonng Algorthm Nathan G. Johnson-Wllams, Student Member IEEE, Robert S. Myaoka, Member IEEE, Xaol L, Student Member IEEE, Tom K. Lewellen, Fellow IEEE,
Desgn of a Real Tme FPGA-based Three Dmensonal Postonng Algorthm Nathan G. Johnson-Wllams, Student Member IEEE, Robert S. Myaoka, Member IEEE, Xaol L, Student Member IEEE, Tom K. Lewellen, Fellow IEEE,
The Greedy Method. Outline and Reading. Change Money Problem. Greedy Algorithms. Applications of the Greedy Strategy. The Greedy Method Technique
 //00 :0 AM Outlne and Readng The Greedy Method The Greedy Method Technque (secton.) Fractonal Knapsack Problem (secton..) Task Schedulng (secton..) Mnmum Spannng Trees (secton.) Change Money Problem Greedy
//00 :0 AM Outlne and Readng The Greedy Method The Greedy Method Technque (secton.) Fractonal Knapsack Problem (secton..) Task Schedulng (secton..) Mnmum Spannng Trees (secton.) Change Money Problem Greedy
VFH*: Local Obstacle Avoidance with Look-Ahead Verification
 2000 IEEE Internatonal Conference on Robotcs and Automaton, San Francsco, CA, Aprl 24-28, 2000, pp. 2505-25 VFH*: Local Obstacle Avodance wth Look-Ahead Verfcaton Iwan Ulrch and Johann Borensten The Unversty
2000 IEEE Internatonal Conference on Robotcs and Automaton, San Francsco, CA, Aprl 24-28, 2000, pp. 2505-25 VFH*: Local Obstacle Avodance wth Look-Ahead Verfcaton Iwan Ulrch and Johann Borensten The Unversty
KINEMATIC ANALYSIS AND EVALUATION OF WHEELCHAIR MOUNTED ROBOTIC ARMS
 FCRAR 2004 Florda Conference on Recent Advances n Robotcs May 6-7, 2004, Orlando, Florda KINEMATIC ANALYSIS AND EVALUATION OF WHEELCHAIR MOUNTED ROBOTIC ARMS Edward J. McCaffrey Ed.tracker@gte.net Redwan
FCRAR 2004 Florda Conference on Recent Advances n Robotcs May 6-7, 2004, Orlando, Florda KINEMATIC ANALYSIS AND EVALUATION OF WHEELCHAIR MOUNTED ROBOTIC ARMS Edward J. McCaffrey Ed.tracker@gte.net Redwan
Product Information. XY compensation unit with spring return AGE-F
 Product Informaton AGE-F AGE-F Flat. Flexble. Compact. Compensaton unt for applcatons n assembly, loadng, and unloadng of machnes and workpece carrers. The use of AGE-F makes t possble to safely grp and
Product Informaton AGE-F AGE-F Flat. Flexble. Compact. Compensaton unt for applcatons n assembly, loadng, and unloadng of machnes and workpece carrers. The use of AGE-F makes t possble to safely grp and
Outline. Self-Organizing Maps (SOM) US Hebbian Learning, Cntd. The learning rule is Hebbian like:
 US Hebbian Learning, Cntd. The learning rule is Hebbian like:") Self-Organzng Maps (SOM) Turgay İBRİKÇİ, PhD. Outlne Introducton Structures of SOM SOM Archtecture Neghborhoods SOM Algorthm Examples Summary 1 2 Unsupervsed Hebban Learnng US Hebban Learnng, Cntd 3 A
Self-Organzng Maps (SOM) Turgay İBRİKÇİ, PhD. Outlne Introducton Structures of SOM SOM Archtecture Neghborhoods SOM Algorthm Examples Summary 1 2 Unsupervsed Hebban Learnng US Hebban Learnng, Cntd 3 A
A Probabilistic Approach to Detect Urban Regions from Remotely Sensed Images Based on Combination of Local Features
 A Probablstc Approach to Detect Urban Regons from Remotely Sensed Images Based on Combnaton of Local Features Berl Sırmaçek German Aerospace Center (DLR) Remote Sensng Technology Insttute Weßlng, 82234,
A Probablstc Approach to Detect Urban Regons from Remotely Sensed Images Based on Combnaton of Local Features Berl Sırmaçek German Aerospace Center (DLR) Remote Sensng Technology Insttute Weßlng, 82234,
Learning the Kernel Parameters in Kernel Minimum Distance Classifier
 Learnng the Kernel Parameters n Kernel Mnmum Dstance Classfer Daoqang Zhang 1,, Songcan Chen and Zh-Hua Zhou 1* 1 Natonal Laboratory for Novel Software Technology Nanjng Unversty, Nanjng 193, Chna Department
Learnng the Kernel Parameters n Kernel Mnmum Dstance Classfer Daoqang Zhang 1,, Songcan Chen and Zh-Hua Zhou 1* 1 Natonal Laboratory for Novel Software Technology Nanjng Unversty, Nanjng 193, Chna Department
Outline. Discriminative classifiers for image recognition. Where in the World? A nearest neighbor recognition example 4/14/2011. CS 376 Lecture 22 1
 4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
4/14/011 Outlne Dscrmnatve classfers for mage recognton Wednesday, Aprl 13 Krsten Grauman UT-Austn Last tme: wndow-based generc obect detecton basc ppelne face detecton wth boostng as case study Today:
ST70 Instruments. Operating Guide. Welcome. This Operating Guide. Contents
 ST70 Instruments Operatng Gude Welcome Congratulatons on havng chosen a Raymarne ST70 nstrument. Ths gves you easy access to the mportant nformaton you need to make your boatng experence both safe and
ST70 Instruments Operatng Gude Welcome Congratulatons on havng chosen a Raymarne ST70 nstrument. Ths gves you easy access to the mportant nformaton you need to make your boatng experence both safe and
Takahiro ISHIKAWA Takahiro Ishikawa Takahiro Ishikawa Takeo KANADE
 Takahro ISHIKAWA Takahro Ishkawa Takahro Ishkawa Takeo KANADE Monocular gaze estmaton s usually performed by locatng the pupls, and the nner and outer eye corners n the mage of the drver s head. Of these
Takahro ISHIKAWA Takahro Ishkawa Takahro Ishkawa Takeo KANADE Monocular gaze estmaton s usually performed by locatng the pupls, and the nner and outer eye corners n the mage of the drver s head. Of these
FIBARO WALL PLUG OPERATING MANUAL FGBWHWPE-102/FGBWHWPF-102 CONTENTS
 OPERATING MANUAL EN FIBARO WALL PLUG FGBWHWPE-102/FGBWHWPF-102 CONTENTS #1: Descrpton and features 3 #2: Parng the accessory 4 #3: Reset 5 #4: Functonalty 6 v1.0 #5: W-F 8 #6: Confgurable parameters 9
OPERATING MANUAL EN FIBARO WALL PLUG FGBWHWPE-102/FGBWHWPF-102 CONTENTS #1: Descrpton and features 3 #2: Parng the accessory 4 #3: Reset 5 #4: Functonalty 6 v1.0 #5: W-F 8 #6: Confgurable parameters 9
A proposal for the motion analysis method of skiing turn by measurement of orientation and gliding trajectory
 Avalable onlne at www.scencedrect.com Proceda Engneerng 13 (211) 17 22 5 th Asa-Pacfc Congress on Sports Technology (APCST) A proposal for the moton analyss method of skng turn by measurement of orentaton
Avalable onlne at www.scencedrect.com Proceda Engneerng 13 (211) 17 22 5 th Asa-Pacfc Congress on Sports Technology (APCST) A proposal for the moton analyss method of skng turn by measurement of orentaton
Outline. Digital Systems. C.2: Gates, Truth Tables and Logic Equations. Truth Tables. Logic Gates 9/8/2011
 9/8/2 2 Outlne Appendx C: The Bascs of Logc Desgn TDT4255 Computer Desgn Case Study: TDT4255 Communcaton Module Lecture 2 Magnus Jahre 3 4 Dgtal Systems C.2: Gates, Truth Tables and Logc Equatons All sgnals
9/8/2 2 Outlne Appendx C: The Bascs of Logc Desgn TDT4255 Computer Desgn Case Study: TDT4255 Communcaton Module Lecture 2 Magnus Jahre 3 4 Dgtal Systems C.2: Gates, Truth Tables and Logc Equatons All sgnals
Face Recognition using 3D Directional Corner Points
 2014 22nd Internatonal Conference on Pattern Recognton Face Recognton usng 3D Drectonal Corner Ponts Xun Yu, Yongsheng Gao School of Engneerng Grffth Unversty Nathan, QLD, Australa xun.yu@grffthun.edu.au,
2014 22nd Internatonal Conference on Pattern Recognton Face Recognton usng 3D Drectonal Corner Ponts Xun Yu, Yongsheng Gao School of Engneerng Grffth Unversty Nathan, QLD, Australa xun.yu@grffthun.edu.au,
A COMBINED AUTOMATED GENERALIZATION MODEL OF SPATIAL ACTIVE OBJECTS
 A COMBINED AUTOMATED GENERALIZATION MODEL OF SPATIAL ACTIVE OBJECTS J. Joubran Abu Daoud, Y. Doytsher Faculty of Cvl and Envronmental Engneerng Department of Transportaton and Geo-Informaton Engneerng
A COMBINED AUTOMATED GENERALIZATION MODEL OF SPATIAL ACTIVE OBJECTS J. Joubran Abu Daoud, Y. Doytsher Faculty of Cvl and Envronmental Engneerng Department of Transportaton and Geo-Informaton Engneerng
Double Layer Tensegrity Grids
 Acta Poltechnca Hungarca Vol. 9, No. 5, 0 Double Laer Tensegrt Grds Tatana Olejnkova Department of Appled Mathematcs, Cvl Engneerng Facult Techncal Unverst of Košce Vsokoškolská, 0 00 Košce, Slovaka e-mal:
Acta Poltechnca Hungarca Vol. 9, No. 5, 0 Double Laer Tensegrt Grds Tatana Olejnkova Department of Appled Mathematcs, Cvl Engneerng Facult Techncal Unverst of Košce Vsokoškolská, 0 00 Košce, Slovaka e-mal:
Design of Simulation Model on the Battlefield Environment ZHANG Jianli 1,a, ZHANG Lin 2,b *, JI Lijian 1,c, GUO Zhongwei 1,d
 Internatonal Conference on Materals Engneerng and Informaton Technology Applcatons (MEITA 2015 Desgn of Smulaton Model on the Battlefeld Envronment ZHANG Janl 1,a, ZHANG Ln 2,b *, JI Ljan 1,c, GUO Zhongwe
Internatonal Conference on Materals Engneerng and Informaton Technology Applcatons (MEITA 2015 Desgn of Smulaton Model on the Battlefeld Envronment ZHANG Janl 1,a, ZHANG Ln 2,b *, JI Ljan 1,c, GUO Zhongwe
A New Transaction Processing Model Based on Optimistic Concurrency Control
 A New Transacton Processng Model Based on Optmstc Concurrency Control Wang Pedong,Duan Xpng,Jr. Abstract-- In ths paper, to support moblty and dsconnecton of moble clents effectvely n moble computng envronment,
A New Transacton Processng Model Based on Optmstc Concurrency Control Wang Pedong,Duan Xpng,Jr. Abstract-- In ths paper, to support moblty and dsconnecton of moble clents effectvely n moble computng envronment,
PHOTOGRAMMETRIC ANALYSIS OF ASYNCHRONOUSLY ACQUIRED IMAGE SEQUENCES
 PHOTOGRAMMETRIC ANALYSIS OF ASYNCHRONOUSLY ACQUIRED IMAGE SEQUENCES Karsten Raguse 1, Chrstan Hepke 2 1 Volkswagen AG, Research & Development, Dept. EZTV, Letter Box 1788, 38436 Wolfsburg, Germany Emal:
PHOTOGRAMMETRIC ANALYSIS OF ASYNCHRONOUSLY ACQUIRED IMAGE SEQUENCES Karsten Raguse 1, Chrstan Hepke 2 1 Volkswagen AG, Research & Development, Dept. EZTV, Letter Box 1788, 38436 Wolfsburg, Germany Emal:
TRAINING LEVEL II. RECIPIENTS Installation companies with the MD training lv1 Distributors with MD training lv1
 TRAINING LEVEL II RECIPIENTS Installaton companes wth the MD tranng lv1 Dstrbutors wth MD tranng lv1 - Z-WAVE - APPs - LP283WD - LP15 - PSB - OCT41 - OC66 - DI32 - OF88 - AC88 - LD88 - METEO - LED88 -
TRAINING LEVEL II RECIPIENTS Installaton companes wth the MD tranng lv1 Dstrbutors wth MD tranng lv1 - Z-WAVE - APPs - LP283WD - LP15 - PSB - OCT41 - OC66 - DI32 - OF88 - AC88 - LD88 - METEO - LED88 -
Fitting & Matching. Lecture 4 Prof. Bregler. Slides from: S. Lazebnik, S. Seitz, M. Pollefeys, A. Effros.
 Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
Fttng & Matchng Lecture 4 Prof. Bregler Sldes from: S. Lazebnk, S. Setz, M. Pollefeys, A. Effros. How do we buld panorama? We need to match (algn) mages Matchng wth Features Detect feature ponts n both
An inverse problem solution for post-processing of PIV data
 An nverse problem soluton for post-processng of PIV data Wt Strycznewcz 1,* 1 Appled Aerodynamcs Laboratory, Insttute of Avaton, Warsaw, Poland *correspondng author: wt.strycznewcz@lot.edu.pl Abstract
An nverse problem soluton for post-processng of PIV data Wt Strycznewcz 1,* 1 Appled Aerodynamcs Laboratory, Insttute of Avaton, Warsaw, Poland *correspondng author: wt.strycznewcz@lot.edu.pl Abstract
Computer-Aided Design. The feedrate scheduling of NURBS interpolator for CNC machine tools
 Computer-Aded Desgn 43 (011) 61 68 Contents lsts avalable at ScenceDrect Computer-Aded Desgn journal homepage: www.elsever.com/locate/cad The feedrate schedulng of NURBS nterpolator for CNC machne tools
Computer-Aded Desgn 43 (011) 61 68 Contents lsts avalable at ScenceDrect Computer-Aded Desgn journal homepage: www.elsever.com/locate/cad The feedrate schedulng of NURBS nterpolator for CNC machne tools
(12) Patent Application Publication (10) Pub. No.: US 2011/ A1
 Patent Application Publication (10) Pub. No.: US 2011/ A1") (19) Unted States (12) Patent Applcaton Publcaton (10) Pub. No.: US 2011/0153198A1 Kokkas et al. US 2011 O153 198A1 (43) Pub. Date: Jun. 23, 2011 (54) (75) (73) (21) (22) (60) METHOD FOR THE DISPLAY OF
(19) Unted States (12) Patent Applcaton Publcaton (10) Pub. No.: US 2011/0153198A1 Kokkas et al. US 2011 O153 198A1 (43) Pub. Date: Jun. 23, 2011 (54) (75) (73) (21) (22) (60) METHOD FOR THE DISPLAY OF
12/2/2009. Announcements. Parametric / Non-parametric. Case-Based Reasoning. Nearest-Neighbor on Images. Nearest-Neighbor Classification
 Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
Introducton to Artfcal Intellgence V22.0472-001 Fall 2009 Lecture 24: Nearest-Neghbors & Support Vector Machnes Rob Fergus Dept of Computer Scence, Courant Insttute, NYU Sldes from Danel Yeung, John DeNero
3D Virtual Eyeglass Frames Modeling from Multiple Camera Image Data Based on the GFFD Deformation Method
 NICOGRAPH Internatonal 2012, pp. 114-119 3D Vrtual Eyeglass Frames Modelng from Multple Camera Image Data Based on the GFFD Deformaton Method Norak Tamura, Somsangouane Sngthemphone and Katsuhro Ktama
NICOGRAPH Internatonal 2012, pp. 114-119 3D Vrtual Eyeglass Frames Modelng from Multple Camera Image Data Based on the GFFD Deformaton Method Norak Tamura, Somsangouane Sngthemphone and Katsuhro Ktama
Image-based Localization in Urban Environments
 Image-based Localzaton n Urban Envronments by Phlp Davd ARL-MR-0738 March 2010 Approved for publc release; dstrbuton unlmted. NOTICES Dsclamers The fndngs n ths report are not to be construed as an offcal
Image-based Localzaton n Urban Envronments by Phlp Davd ARL-MR-0738 March 2010 Approved for publc release; dstrbuton unlmted. NOTICES Dsclamers The fndngs n ths report are not to be construed as an offcal
Color in OpenGL Polygonal Shading Light Source in OpenGL Material Properties Normal Vectors Phong model
 Color n OpenGL Polygonal Shadng Lght Source n OpenGL Materal Propertes Normal Vectors Phong model 2 We know how to rasterze - Gven a 3D trangle and a 3D vewpont, we know whch pxels represent the trangle
Color n OpenGL Polygonal Shadng Lght Source n OpenGL Materal Propertes Normal Vectors Phong model 2 We know how to rasterze - Gven a 3D trangle and a 3D vewpont, we know whch pxels represent the trangle
Constrained Shape Modification of B-Spline curves
 Constraned Shape Modfcaton of B-Splne curves Mukul Tul, N. Venkata Reddy and Anupam Saxena Indan Insttute of Technology Kanpur, mukult@tk.ac.n, nvr@tk.ac.n, anupams@tk.ac.n ABSTRACT Ths paper proposes
Constraned Shape Modfcaton of B-Splne curves Mukul Tul, N. Venkata Reddy and Anupam Saxena Indan Insttute of Technology Kanpur, mukult@tk.ac.n, nvr@tk.ac.n, anupams@tk.ac.n ABSTRACT Ths paper proposes
Snakes-based approach for extraction of building roof contours from digital aerial images
 Snakes-based approach for extracton of buldng roof contours from dgtal aeral mages Alur P. Dal Poz and Antono J. Fazan São Paulo State Unversty Dept. of Cartography, R. Roberto Smonsen 305 19060-900 Presdente
Snakes-based approach for extracton of buldng roof contours from dgtal aeral mages Alur P. Dal Poz and Antono J. Fazan São Paulo State Unversty Dept. of Cartography, R. Roberto Smonsen 305 19060-900 Presdente
5th International Conference on Advanced Materials and Computer Science (ICAMCS 2016)
") 5th Internatonal Conference on Advanced Materals and Coputer Scence (ICAMCS 6) Aeral Survey and Scannng Pont Cloud Data Acquston & Modelng Technology for Hydropower Engneerng Shangwe LIU,, Yng WANG, Hua
5th Internatonal Conference on Advanced Materals and Coputer Scence (ICAMCS 6) Aeral Survey and Scannng Pont Cloud Data Acquston & Modelng Technology for Hydropower Engneerng Shangwe LIU,, Yng WANG, Hua
Evaluation of an Enhanced Scheme for High-level Nested Network Mobility
 IJCSNS Internatonal Journal of Computer Scence and Network Securty, VOL.15 No.10, October 2015 1 Evaluaton of an Enhanced Scheme for Hgh-level Nested Network Moblty Mohammed Babker Al Mohammed, Asha Hassan.
IJCSNS Internatonal Journal of Computer Scence and Network Securty, VOL.15 No.10, October 2015 1 Evaluaton of an Enhanced Scheme for Hgh-level Nested Network Moblty Mohammed Babker Al Mohammed, Asha Hassan.