Automatic Ranking of Images on the Web
|
|
|
- Bethany Wade
- 5 years ago
- Views:
Transcription


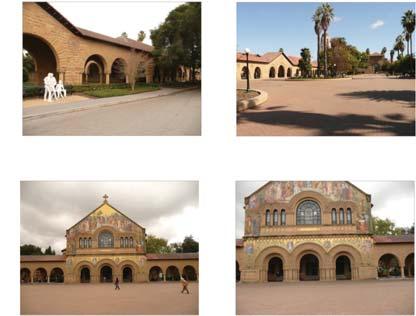
1 Automatic Ranking of Images on the Web HangHang Zhang Electrical Engineering Department Stanford University Zixuan Wang Electrical Engineering Department Stanford University Abstract We propose a new way to automatically find representative images of a specified object category. Given a large collection of images returned by a web search for an object category, our approach learns the similarities among images without any user help. We extract local features from images, and represent each image using bag-of-words model. The similarity of a pair of image is measured by computing the distance between two signatures. After we get the similarity graph, we run PageRank [3] algorithm to find representative images. We present results and a user evaluation on a variety of object categories, demonstrating the effectiveness of the approach. In this project, our goal is to rank images which have the similar semantic meaning. The images can be the results returned by common image search engines or other existing image data sets like ImageNet [4]. Figure 1 shows two examples. The first example shows when we search stanford gates building in Google images and the second example shows the first page of vaulting horse in the ImageNet. The current search engines optimize the search results for popular keywords, but the results for less popular keywords are still not organized in a desirable way. We consider the images that share most similarities with rest of the images the most typical image in the collection and rank these images on the top. For example, we do not want the panda image with a large potion of people appears in the first. We would like to see the canonical view of the object on the top. We will mainly develop and test our algorithm using ImageNet, but the algorithm can be applied to other image categories (including Google image, or Flickr). This work is different from the previous work like finding iconic images [2] or re-rank images returned from the search engine [8]. Because the variance of images in each category is very high. Objects in the same category have the same semantic meaning but with quite distinct appearances. It is not practical to use geometric verification to check the consistency between two images, which causes finding the similarity between two images is difficult. To solve this problem, our intuition is the canonical image should share the most features with other images in the same category. We build a graph, in which each vertex represents an image and the weight of the edge reflects the number of common features that two images share. After having the graph, we use PageRank [3] to assign a rank value to each vertex. Vertices with higher rank values are viewed as the canonical images. 1. Introduction (a) Images returned by querying stanford gates building (b) Images of vaulting horse synset Figure 1. Image collection before ranking
2 2. Previous work Recent work in content based image retrieval has mimicked simple text-retrieval systems using the analogy of visual words [19]. Images are scanned for salient regions and a high-dimensional descriptor is computed for each region. These descriptors are then quantized or clustered into a vocabulary of visual words, and each salient region is mapped to the visual word closest to it under this clustering. Each visual word has an inverted index, which records the index of images that contain it. This can improve the speed for the retrieval, reducing the number of images to compare from the size of corpus to the number of images that share the same visual word with the query image. An image is then represented as a bag of visual words, in which tf-idf (term frequency- inverted document frequency) can be used and these are entered into an index for later querying and retrieval. Bag of words model was later applied in natural scene classification [5], content based image retrieval [16] and recognizing landmarks [20]. Experiments show that bag of words model has good performance in these areas. Fergus et al. [6] and Lin et al. [11] dealt with the precision problem by re-ranking the images downloaded from an image search. The method in [6] involved visual clustering of the images by extending probabilistic Latent Semantic Analysis (plsa) [7] over a visual vocabulary. Lin et al. [11] re-ranked using the text on the original page from which the image was obtained. 3. Approach 3.1. Outline We outline our approach for re-ranking images as shown in Figure Collect images corresponds to one specific object. 2. For each image, detect a set of interest regions and extract local feature descriptors. 3. Use PCA (Principal Component Analysis) to reduce the dimension of features. 4. Cluster feature descriptors using hierarchical k-means [14]. Each cluster center represents a visual word. 5. Represent each image by a sparse vector. Compute the distance between pair of images. 6. Compute the PageRank value for each image Bag of words model We use two types of interest region detectors and in each interest region, we adopt SIFT feature descriptor. 1. Lowe s DoG detector. Scale invariant interest regions are detected using Differential of Gaussian detector [12]. 2. Affine invariant detector. Affine invariant interest regions are detected using Harris-affine and Hessianaffine keypoint detectors [13]. DoG interest region detector is scale invariant. Harrisaffine and Hessian-affine interest region detector are affine invariant. For each image, hundreds of local features are extracted. After we get all features from the category, we use PCA to find a subspace to approximate the features so that we can reduce the dimension of features. This step can reduce the computation time for the following clustering. Then we use k-means to cluster those features into vocabulary. Large size of vocabulary tends to have better performance since the visual words are more discriminative when the vocabulary size grows. However, Philbin et al. [16] shows that when the size of vocabulary goes beyond a threshold, typically one million, the performance stops increasing. In experiment, we test the performance of our algorithm using different scale of vocabulary. We use two methods instead of original k-means to generate the vocabulary because when the k is large, each iteration in original k-means takes O(nk) time which is quite slow. The first is to use the hierarchical k-means and the second is to use approximate k-means Hierarchical k-means We use a tree structure to represent the whole vocabulary. If k defining the final number of clusters, b defines the branch factor (number of children of each node) of the tree. First, an initial k-means process is run on the training data, defining b cluster centers. The training data is then partitioned into b groups, where each group consists of the feature descriptors vectors closest to a particular cluster center. We stop this iteration until the height of the tree reaches L. So, we get a vocabulary tree whose size is b L = k. The hierarchical k-means is faster than the original one but it has drawback that when the data point lies close to Voronoi region boundary for each cluster center, the quantization error is large. When the hierarchical structure is built, we can quantize new data point in O(bL) =O(log k) Approximate k-means In original k-means, a large portion computation time is spent on calculating nearest neighbours between the points and cluster centers. We replace this exact computation by an approximate nearest neighbor method, and use a forest of 8 randomized k-d trees [10] built over the cluster centers at the beginning of each iteration to increase speed. The average computation time to find the nearest neighbor in each

3 Figure 2. Pipeline of the re-rank algorithm iteration is reduced from O(nk) to O(n log k + k log k), where n is the number of features to be clustered. Usually in a k-d tree, each node splits the dataset using the dimension with the highest variance for all the data points falling into that node and the value to split on is found by taking the median value along that dimension. In the randomized version, the splitting dimension is chosen at random from among a set of the dimensions with highest variance and the split value is randomly chosen using a point close to the median. We combine the output found by these trees to get the best result. A new data point is assigned to the approximately closest cluster center as follows. Initially, each tree is descended to a leaf and the distances to the discriminating boundaries are recorded in a single priority queue for all trees. Then, we iteratively choose the most promising branch from all trees and keep adding unseen nodes into the priority queue. We stop once a fixed number of tree paths have been explored. This way, we can use more trees without significantly increasing the search time. Philbin et al. [16] show that for moderate values of k, the ratio of points assigned to different cluster centers differs from the exact version by less than 1%. After we have k cluster centers, we compute 8 randomized k-d trees for the quantization. The average time for quantizing new data point is O(log k). Figure 4 show the parts of visual words we build using hierarchical k-means. To quantize new data point, we use the soft assignment by assigning each feature to its c nearest neighbors. We define the weights to i neighbor as e α di, where d i is the distance and α is the control parameter. We get a sparse vector representation of the image, in which each entry is the frequency of the particular visual word appears in the image. We normalize the vector to have the sum of Similarity of images After we get the sparse vector representation for each image, we can simply use the inner product of two vectors to estimate the distance between a pair of images. It is fast but it does not consider the relative position of each visual word. Consider the simple example shown in Figure 5, in which each shape represents a visual word. The triangle is closer to the circle than other shapes. Suppose we only have these four visual words: triangle, circle, rectangle and pentagon. Assume image A only contains triangle so its index I A =(1, 0, 0, 0) and image B only contains circle, I B =(0, 1, 0, 0) and image C only contains rectangle, I C =(0, 0, 1, 0). If we compute the inner product, we get the distance between A and B and the distance between A and C are the same. But in fact, the distance between A and B should be smaller due to the triangle and circle are closer to each other. To take into account of the relative positions of visual words, we compute the EMD (Earth Mover s Distance) [17] between two image signatures. Computing EMD is expensive compare with the inner product, recently Pele et al. [15] propose a fast method to compute EMD. Alternatively, we can use pyramid histogram matching [9] to approximate the optimal solution. The idea of EMD is the following: In the original EMD paper, a signature is represented by {s j =(m j,ω mj )}, where m j is the position of the visual word and ω mj is the weight given to this visual word. The integer subscript j ranges from one to the number of features extracted from the specific image. The image index can be viewed as a histogram h i, in which the vector i index a set of visual words and each visual word has a weight, so the image index is a signature {s j =(m j,ω mj )}. Now suppose we have two images P = {(p 1,ω p1 ),...,(p m,ω pm )} and Q = {(q 1,ω q1 ),...,(q n,ω qn )}. Image P has m features and image Q has n features. D =[d ij ] the ground distance matrix where d ij is the ground distance between visual word p i and q j. We want to find a flow F =[f ij ] with f ij the flow between p i and q j that minimizes the total cost: m n W (P, Q, F) = d ij f ij (1) i=1 j=1 subject to the following constraint: f ij 0 1 i m, 1 j n (2) n f ij ω pi 1 i m (3) j=1
 DoG keypoint detector m n m n f ij = min ( ω pi, ω qj ) (5) i=1 j=1 i=1 j=1 Once the problem is solved, we have found the")

 Harris affine keypoint detector Figure 5.")

4 m f ij ω qj 1 j n (4) i=1 Figure 4. Different local features (a) DoG keypoint detector m n m n f ij = min ( ω pi, ω qj ) (5) i=1 j=1 i=1 j=1 Once the problem is solved, we have found the optimal flow F, the earth mover s distance is defined as: m n i=1 j=1 EMD(P, Q) = d ijf ij m n i=1 j=1 f (6) ij Intuitively, given two signatures, one can be seen as a mass of earth properly spread in space, the other as a collection of holes in that same space. Then, the EMD measures the least amount of work needed to fill the holes with earth. Here, a unit of work corresponds to transporting a unit of earth by a unit of ground distance. (b) Harris affine keypoint detector Figure 5. The positions of visual words (c) Hessian affine keypoint detector Figure 3. Different local features 3.4. Re-rank images After we compute the similarity for each pair, we construct a similarity graph. We perform PageRank on this graph and rank the images. We construct the similarity graph as follows: We do content based image retrieval for each image in the corpus and candidate images are returned. We use the methods above to compute the similarity between the query image and the candidate image and add an edge connecting these two vertices in the graph. We define
5 the similarity matrix W N N and R N 1, where N is the number of images in the corpus. The element in R is defined as the rank value associate with each image. Its stable state is derived from an iterative procedure as follows: 1. Define the similarity matrix W N N as: W ij = e dist(i,j)/σ2 (7) where dist(i, j) is the distance metric between image i and image j and σ is the control parameter. 2. Symmetrically normalize W by S = D 1/2 WD 1/2 (8) where D is a diagonal matrix and D ii = N j=1 W ij. 3. Do iteration until convergence R(t +1)=βS R(t)+(1 β)y (9) where t denotes the number of iterations and β is the propagating parameter. Y is the initial state representation for each vertex, Y i =1/N. We set R(0) = Y. We sort images according to their rank values in R. 4. Experiment 4.1. Images of the same object In the first experiment, we choose ten images from flickr by searching statue of liberty. When we use hierarchical k-means (HKM) and approximate k-means (AKM), we get the same result. The result is shown in Figure 6. In the second experiment, we take ten photos of the Stanford main quad. The result is shown in Figure 7 and Figure 8. The running time of two experiments is shown in Table Images of similar objects In the first experiment, we randomly select 30 images from the horn synset from ImageNet. Top 10 images after ranking are shown in Figure 9. In the second experiment, we randomly select 200 images from the horse synset from ImageNet. Top 20 images after ranking are shown in Figure 10. In both experiment above, we use inner product to compute the similarity of images since EMD is too slow when the number of visual word is large. 5. Conclusion 5.1. Analyze the algorithm The current algorithm works on the static landmarks or buildings since the feature we use is suitable for describing the same object. Since we do not segment the object in the preprocessing step, images with complicated background will affect the accuracy of ranking. For the objects that have the same semantic meaning, like pictures in one synset in ImageNet, the SIFT descriptor is not robust enough Future work To eliminate the affect of background, we can segment the foreground objects first and compute the visual words using the foreground objects. To improve the performance on similar images ranking, we should combine other image features including geometric blur feature [1] or GIST feature [18]. The current EMD algorithm is too slow to rank images in a large scale, we need to integrate the fast EMD algorithm [15] to speed up the procedure of similarity computation. When getting the similarity matrix, we can also adopt graph cut algorithm to cluster images into subcategories, in which images in the same subcategory have strong connection. References [1] A. Berg and J. Malik. Geometric blur and template matching. In IEEE COMPUTER SOCIETY CONFERENCE ON COM- PUTER VISION AND PATTERN RECOGNITION, volume 1. IEEE Computer Society; 1999, [2] T. Berg and A. Berg. Finding Iconic Images [3] S. Brin and L. Page. The anatomy of a large-scale hypertextual Web search engine. Computer networks and ISDN systems, 30(1-7): , [4] J. Deng, W. Dong, R. Socher, L. Li, K. Li, and L. Fei-Fei. ImageNet: a large-scale hierarchical image database. In Proc. CVPR, pages , [5] L. Fei-Fei and P. Perona. A bayesian hierarchical model for learning natural scene categories. CVPR, pages , [6] R. Fergus, L. Fei-Fei, P. Perona, and A. Zisserman. Learning object categories from googles image search. In Proceedings of the Tenth IEEE International Conference on Computer Vision, pages Citeseer, [7] T. Hofmann. Probabilistic latent semantic indexing. In Proceedings of the 22nd annual international ACM SIGIR conference on Research and development in information retrieval, pages ACM New York, NY, USA, [8] Y. Jing and S. Baluja. Pagerank for product image search [9] S. Lazebnik, C. Schmid, and J. Ponce. Beyond bags of features: Spatial pyramid matching for recognizing natural scene categories. Citeseer, [10] V. Lepetit, P. Lagger, and P. Fua. Randomized trees for realtime keypoint recognition. In IEEE COMPUTER SOCIETY

6 Table 1. Running time Feature extraction HKM/AKM Inner product/emd PageRank Statue of liberty 12.5s 4.3/0.8s 0.1/1.9s 0.1s Stanford main quad 13.9s 4.7/0.8s 0.1/2.1s 0.1s Figure 6. Rank result for statue of liberty images using inner product CONFERENCE ON COMPUTER VISION AND PATTERN RECOGNITION, volume 2, page 775. Citeseer, [11] W. Lin, R. Jin, and A. Hauptmann. Web image retrieval reranking with relevance model. In IEEE/WIC International Conference on Web Intelligence, WI Proceedings, pages , [12] D. Lowe. Object recognition from local scale-invariant features. In International Conference on Computer Vision, volume 2, pages , [13] K. Mikolajczyk and C. Schmid. Scale & affine invariant interest point detectors. International Journal of Computer Vision, 60(1):63 86, [14] D. Nister and H. Stewenius. Scalable recognition with a vocabulary tree. In Proc. CVPR, volume 5. Citeseer, [15] O. Pele and M. Werman. Fast and Robust Earth Movers Distances. ICCV, [16] J. Philbin, O. Chum, M. Isard, J. Sivic, and A. Zisserman. Object retrieval with large vocabularies and fast spatial matching. In Proc. CVPR, volume 3613, pages Citeseer, [17] Y. Rubner, C. Tomasi, and L. Guibas. The earth mover s distance as a metric for image retrieval. International Journal of Computer Vision, 40(2):99 121, [18] C. Siagian and L. Itti. Rapid biologically-inspired scene classification using features shared with visual attention. IEEE transactions on pattern analysis and machine intelligence, 29(2):300, [19] J. Sivic and A. Zisserman. Video Google: A text retrieval approach to object matching in videos. In Proc. ICCV, volume 2, pages Citeseer, [20] Y. Zheng, M. Zhao, Y. Song, H. Adam, U. Buddemeier, A. Bissacco, F. Brucher, T. Chua, and H. Neven. Tour the World: building a web-scale landmark recognition engine. In Proc. IEEE Conf. on Computer Vision and Pattern Recognition, 2009.



7 Figure 7. Rank result for Stanford main quad images using inner product Figure 8. Rank result for Stanford main quad images using EMD









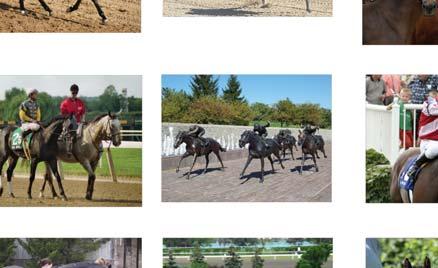

8 Figure 9. Rank result of horns obtained in ImageNet Figure 10. Rank result of horses obtained in ImageNet
Large Scale Image Retrieval
 Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
Large Scale Image Retrieval Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague Features Affine invariant features Efficient descriptors Corresponding regions
SEARCH BY MOBILE IMAGE BASED ON VISUAL AND SPATIAL CONSISTENCY. Xianglong Liu, Yihua Lou, Adams Wei Yu, Bo Lang
 SEARCH BY MOBILE IMAGE BASED ON VISUAL AND SPATIAL CONSISTENCY Xianglong Liu, Yihua Lou, Adams Wei Yu, Bo Lang State Key Laboratory of Software Development Environment Beihang University, Beijing 100191,
SEARCH BY MOBILE IMAGE BASED ON VISUAL AND SPATIAL CONSISTENCY Xianglong Liu, Yihua Lou, Adams Wei Yu, Bo Lang State Key Laboratory of Software Development Environment Beihang University, Beijing 100191,
Large-scale visual recognition The bag-of-words representation
 Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Large-scale visual recognition The bag-of-words representation Florent Perronnin, XRCE Hervé Jégou, INRIA CVPR tutorial June 16, 2012 Outline Bag-of-words Large or small vocabularies? Extensions for instance-level
Object Classification Problem
 HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
HIERARCHICAL OBJECT CATEGORIZATION" Gregory Griffin and Pietro Perona. Learning and Using Taxonomies For Fast Visual Categorization. CVPR 2008 Marcin Marszalek and Cordelia Schmid. Constructing Category
Beyond bags of features: Adding spatial information. Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba
 Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
Beyond bags of features: Adding spatial information Many slides adapted from Fei-Fei Li, Rob Fergus, and Antonio Torralba Adding spatial information Forming vocabularies from pairs of nearby features doublets
The most cited papers in Computer Vision
 COMPUTER VISION, PUBLICATION The most cited papers in Computer Vision In Computer Vision, Paper Talk on February 10, 2012 at 11:10 pm by gooly (Li Yang Ku) Although it s not always the case that a paper
COMPUTER VISION, PUBLICATION The most cited papers in Computer Vision In Computer Vision, Paper Talk on February 10, 2012 at 11:10 pm by gooly (Li Yang Ku) Although it s not always the case that a paper
Visual Word based Location Recognition in 3D models using Distance Augmented Weighting
 Visual Word based Location Recognition in 3D models using Distance Augmented Weighting Friedrich Fraundorfer 1, Changchang Wu 2, 1 Department of Computer Science ETH Zürich, Switzerland {fraundorfer, marc.pollefeys}@inf.ethz.ch
Visual Word based Location Recognition in 3D models using Distance Augmented Weighting Friedrich Fraundorfer 1, Changchang Wu 2, 1 Department of Computer Science ETH Zürich, Switzerland {fraundorfer, marc.pollefeys}@inf.ethz.ch
Lecture 24: Image Retrieval: Part II. Visual Computing Systems CMU , Fall 2013
 Lecture 24: Image Retrieval: Part II Visual Computing Systems Review: K-D tree Spatial partitioning hierarchy K = dimensionality of space (below: K = 2) 3 2 1 3 3 4 2 Counts of points in leaf nodes Nearest
Lecture 24: Image Retrieval: Part II Visual Computing Systems Review: K-D tree Spatial partitioning hierarchy K = dimensionality of space (below: K = 2) 3 2 1 3 3 4 2 Counts of points in leaf nodes Nearest
FACULTY OF ENGINEERING AND INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER SCIENCE. Project Plan
 FACULTY OF ENGINEERING AND INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER SCIENCE Project Plan Structured Object Recognition for Content Based Image Retrieval Supervisors: Dr. Antonio Robles Kelly Dr. Jun
FACULTY OF ENGINEERING AND INFORMATION TECHNOLOGY DEPARTMENT OF COMPUTER SCIENCE Project Plan Structured Object Recognition for Content Based Image Retrieval Supervisors: Dr. Antonio Robles Kelly Dr. Jun
Aggregating Descriptors with Local Gaussian Metrics
 Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
Aggregating Descriptors with Local Gaussian Metrics Hideki Nakayama Grad. School of Information Science and Technology The University of Tokyo Tokyo, JAPAN nakayama@ci.i.u-tokyo.ac.jp Abstract Recently,
By Suren Manvelyan,
 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan, http://www.surenmanvelyan.com/gallery/7116 By Suren Manvelyan,
CS6670: Computer Vision
 CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
CS6670: Computer Vision Noah Snavely Lecture 16: Bag-of-words models Object Bag of words Announcements Project 3: Eigenfaces due Wednesday, November 11 at 11:59pm solo project Final project presentations:
Large scale object/scene recognition
 Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Large scale object/scene recognition Image dataset: > 1 million images query Image search system ranked image list Each image described by approximately 2000 descriptors 2 10 9 descriptors to index! Database
Large-scale Image Search and location recognition Geometric Min-Hashing. Jonathan Bidwell
 Large-scale Image Search and location recognition Geometric Min-Hashing Jonathan Bidwell Nov 3rd 2009 UNC Chapel Hill Large scale + Location Short story... Finding similar photos See: Microsoft PhotoSynth
Large-scale Image Search and location recognition Geometric Min-Hashing Jonathan Bidwell Nov 3rd 2009 UNC Chapel Hill Large scale + Location Short story... Finding similar photos See: Microsoft PhotoSynth
Bag of Words Models. CS4670 / 5670: Computer Vision Noah Snavely. Bag-of-words models 11/26/2013
 CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
CS4670 / 5670: Computer Vision Noah Snavely Bag-of-words models Object Bag of words Bag of Words Models Adapted from slides by Rob Fergus and Svetlana Lazebnik 1 Object Bag of words Origin 1: Texture Recognition
Enhanced and Efficient Image Retrieval via Saliency Feature and Visual Attention
 Enhanced and Efficient Image Retrieval via Saliency Feature and Visual Attention Anand K. Hase, Baisa L. Gunjal Abstract In the real world applications such as landmark search, copy protection, fake image
Enhanced and Efficient Image Retrieval via Saliency Feature and Visual Attention Anand K. Hase, Baisa L. Gunjal Abstract In the real world applications such as landmark search, copy protection, fake image
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza 1 Lab exercise today replaced by Deep Learning Tutorial Room ETH HG E 1.1 from 13:15 to 15:00 Optional lab
Visual Object Recognition
 Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Perceptual and Sensory Augmented Computing Visual Object Recognition Tutorial Visual Object Recognition Bastian Leibe Computer Vision Laboratory ETH Zurich Chicago, 14.07.2008 & Kristen Grauman Department
Three things everyone should know to improve object retrieval. Relja Arandjelović and Andrew Zisserman (CVPR 2012)
") Three things everyone should know to improve object retrieval Relja Arandjelović and Andrew Zisserman (CVPR 2012) University of Oxford 2 nd April 2012 Large scale object retrieval Find all instances of
Three things everyone should know to improve object retrieval Relja Arandjelović and Andrew Zisserman (CVPR 2012) University of Oxford 2 nd April 2012 Large scale object retrieval Find all instances of
Lecture 12 Recognition
 Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Institute of Informatics Institute of Neuroinformatics Lecture 12 Recognition Davide Scaramuzza http://rpg.ifi.uzh.ch/ 1 Lab exercise today replaced by Deep Learning Tutorial by Antonio Loquercio Room
Fuzzy based Multiple Dictionary Bag of Words for Image Classification
 Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Available online at www.sciencedirect.com Procedia Engineering 38 (2012 ) 2196 2206 International Conference on Modeling Optimisation and Computing Fuzzy based Multiple Dictionary Bag of Words for Image
Keypoint-based Recognition and Object Search
 03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
03/08/11 Keypoint-based Recognition and Object Search Computer Vision CS 543 / ECE 549 University of Illinois Derek Hoiem Notices I m having trouble connecting to the web server, so can t post lecture
Efficient Representation of Local Geometry for Large Scale Object Retrieval
 Efficient Representation of Local Geometry for Large Scale Object Retrieval Michal Perďoch Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague IEEE Computer Society
Efficient Representation of Local Geometry for Large Scale Object Retrieval Michal Perďoch Ondřej Chum and Jiří Matas Center for Machine Perception Czech Technical University in Prague IEEE Computer Society
Scale Invariant Feature Transform
 Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
Why do we care about matching features? Scale Invariant Feature Transform Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Automatic
IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1
 IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1 : Presentation structure : 1. Brief overview of talk 2. What does Object Recognition involve? 3. The Recognition Problem 4. Mathematical background:
IMAGE MATCHING - ALOK TALEKAR - SAIRAM SUNDARESAN 11/23/2010 1 : Presentation structure : 1. Brief overview of talk 2. What does Object Recognition involve? 3. The Recognition Problem 4. Mathematical background:
Beyond Bags of Features
 : for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
: for Recognizing Natural Scene Categories Matching and Modeling Seminar Instructed by Prof. Haim J. Wolfson School of Computer Science Tel Aviv University December 9 th, 2015
Scale Invariant Feature Transform
 Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Scale Invariant Feature Transform Why do we care about matching features? Camera calibration Stereo Tracking/SFM Image moiaicing Object/activity Recognition Objection representation and recognition Image
Instance-level recognition part 2
 Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Visual Recognition and Machine Learning Summer School Paris 2011 Instance-level recognition part 2 Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique,
Instance-level recognition II.
 Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Reconnaissance d objets et vision artificielle 2010 Instance-level recognition II. Josef Sivic http://www.di.ens.fr/~josef INRIA, WILLOW, ENS/INRIA/CNRS UMR 8548 Laboratoire d Informatique, Ecole Normale
Evaluation and comparison of interest points/regions
 Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Introduction Evaluation and comparison of interest points/regions Quantitative evaluation of interest point/region detectors points / regions at the same relative location and area Repeatability rate :
Video Google: A Text Retrieval Approach to Object Matching in Videos
 Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
Video Google: A Text Retrieval Approach to Object Matching in Videos Josef Sivic, Frederik Schaffalitzky, Andrew Zisserman Visual Geometry Group University of Oxford The vision Enable video, e.g. a feature
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES
 IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
IMAGE RETRIEVAL USING VLAD WITH MULTIPLE FEATURES Pin-Syuan Huang, Jing-Yi Tsai, Yu-Fang Wang, and Chun-Yi Tsai Department of Computer Science and Information Engineering, National Taitung University,
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors
 K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
K-Means Based Matching Algorithm for Multi-Resolution Feature Descriptors Shao-Tzu Huang, Chen-Chien Hsu, Wei-Yen Wang International Science Index, Electrical and Computer Engineering waset.org/publication/0007607
Colorado School of Mines. Computer Vision. Professor William Hoff Dept of Electrical Engineering &Computer Science.
 Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Professor William Hoff Dept of Electrical Engineering &Computer Science http://inside.mines.edu/~whoff/ 1 Object Recognition in Large Databases Some material for these slides comes from www.cs.utexas.edu/~grauman/courses/spring2011/slides/lecture18_index.pptx
Previously. Part-based and local feature models for generic object recognition. Bag-of-words model 4/20/2011
 Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
Previously Part-based and local feature models for generic object recognition Wed, April 20 UT-Austin Discriminative classifiers Boosting Nearest neighbors Support vector machines Useful for object recognition
The SIFT (Scale Invariant Feature
 The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
The SIFT (Scale Invariant Feature Transform) Detector and Descriptor developed by David Lowe University of British Columbia Initial paper ICCV 1999 Newer journal paper IJCV 2004 Review: Matt Brown s Canonical
6.819 / 6.869: Advances in Computer Vision
 6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
6.819 / 6.869: Advances in Computer Vision Image Retrieval: Retrieval: Information, images, objects, large-scale Website: http://6.869.csail.mit.edu/fa15/ Instructor: Yusuf Aytar Lecture TR 9:30AM 11:00AM
Patch Descriptors. EE/CSE 576 Linda Shapiro
 Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors EE/CSE 576 Linda Shapiro 1 How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Lecture 12 Recognition. Davide Scaramuzza
 Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Lecture 12 Recognition Davide Scaramuzza Oral exam dates UZH January 19-20 ETH 30.01 to 9.02 2017 (schedule handled by ETH) Exam location Davide Scaramuzza s office: Andreasstrasse 15, 2.10, 8050 Zurich
Bundling Features for Large Scale Partial-Duplicate Web Image Search
 Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Bundling Features for Large Scale Partial-Duplicate Web Image Search Zhong Wu, Qifa Ke, Michael Isard, and Jian Sun Microsoft Research Abstract In state-of-the-art image retrieval systems, an image is
Large Scale 3D Reconstruction by Structure from Motion
 Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Large Scale 3D Reconstruction by Structure from Motion Devin Guillory Ziang Xie CS 331B 7 October 2013 Overview Rome wasn t built in a day Overview of SfM Building Rome in a Day Building Rome on a Cloudless
Scalable Recognition with a Vocabulary Tree
 Scalable Recognition with a Vocabulary Tree David Nistér and Henrik Stewénius Center for Visualization and Virtual Environments Department of Computer Science, University of Kentucky http://www.vis.uky.edu/
Scalable Recognition with a Vocabulary Tree David Nistér and Henrik Stewénius Center for Visualization and Virtual Environments Department of Computer Science, University of Kentucky http://www.vis.uky.edu/
Recognition. Topics that we will try to cover:
 Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Recognition Topics that we will try to cover: Indexing for fast retrieval (we still owe this one) Object classification (we did this one already) Neural Networks Object class detection Hough-voting techniques
Object Recognition and Augmented Reality
 11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
11/02/17 Object Recognition and Augmented Reality Dali, Swans Reflecting Elephants Computational Photography Derek Hoiem, University of Illinois Last class: Image Stitching 1. Detect keypoints 2. Match
arxiv: v3 [cs.cv] 3 Oct 2012
![arxiv: v3 [cs.cv] 3 Oct 2012](/thumbs/96/128756091.jpg "arxiv: v3 [cs.cv] 3 Oct 2012") Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Combined Descriptors in Spatial Pyramid Domain for Image Classification Junlin Hu and Ping Guo arxiv:1210.0386v3 [cs.cv] 3 Oct 2012 Image Processing and Pattern Recognition Laboratory Beijing Normal University,
Object Recognition with Invariant Features
 Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Object Recognition with Invariant Features Definition: Identify objects or scenes and determine their pose and model parameters Applications Industrial automation and inspection Mobile robots, toys, user
Scalable Recognition with a Vocabulary Tree
 Scalable Recognition with a Vocabulary Tree David Nistér and Henrik Stewénius Center for Visualization and Virtual Environments Department of Computer Science, University of Kentucky http://www.vis.uky.edu/
Scalable Recognition with a Vocabulary Tree David Nistér and Henrik Stewénius Center for Visualization and Virtual Environments Department of Computer Science, University of Kentucky http://www.vis.uky.edu/
Hamming embedding and weak geometric consistency for large scale image search
 Hamming embedding and weak geometric consistency for large scale image search Herve Jegou, Matthijs Douze, and Cordelia Schmid INRIA Grenoble, LEAR, LJK firstname.lastname@inria.fr Abstract. This paper
Hamming embedding and weak geometric consistency for large scale image search Herve Jegou, Matthijs Douze, and Cordelia Schmid INRIA Grenoble, LEAR, LJK firstname.lastname@inria.fr Abstract. This paper
VK Multimedia Information Systems
 VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
VK Multimedia Information Systems Mathias Lux, mlux@itec.uni-klu.ac.at Dienstags, 16.oo Uhr This work is licensed under the Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Agenda Evaluations
Compressed local descriptors for fast image and video search in large databases
 Compressed local descriptors for fast image and video search in large databases Matthijs Douze2 joint work with Hervé Jégou1, Cordelia Schmid2 and Patrick Pérez3 1: INRIA Rennes, TEXMEX team, France 2:
Compressed local descriptors for fast image and video search in large databases Matthijs Douze2 joint work with Hervé Jégou1, Cordelia Schmid2 and Patrick Pérez3 1: INRIA Rennes, TEXMEX team, France 2:
Efficient Kernels for Identifying Unbounded-Order Spatial Features
 Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Efficient Kernels for Identifying Unbounded-Order Spatial Features Yimeng Zhang Carnegie Mellon University yimengz@andrew.cmu.edu Tsuhan Chen Cornell University tsuhan@ece.cornell.edu Abstract Higher order
Artistic ideation based on computer vision methods
 Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Journal of Theoretical and Applied Computer Science Vol. 6, No. 2, 2012, pp. 72 78 ISSN 2299-2634 http://www.jtacs.org Artistic ideation based on computer vision methods Ferran Reverter, Pilar Rosado,
Visual Recognition and Search April 18, 2008 Joo Hyun Kim
 Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Visual Recognition and Search April 18, 2008 Joo Hyun Kim Introduction Suppose a stranger in downtown with a tour guide book?? Austin, TX 2 Introduction Look at guide What s this? Found Name of place Where
Object Recognition. Computer Vision. Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce
 Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Object Recognition Computer Vision Slides from Lana Lazebnik, Fei-Fei Li, Rob Fergus, Antonio Torralba, and Jean Ponce How many visual object categories are there? Biederman 1987 ANIMALS PLANTS OBJECTS
Introduction. Introduction. Related Research. SIFT method. SIFT method. Distinctive Image Features from Scale-Invariant. Scale.
 Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Distinctive Image Features from Scale-Invariant Keypoints David G. Lowe presented by, Sudheendra Invariance Intensity Scale Rotation Affine View point Introduction Introduction SIFT (Scale Invariant Feature
Improving Recognition through Object Sub-categorization
 Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Improving Recognition through Object Sub-categorization Al Mansur and Yoshinori Kuno Graduate School of Science and Engineering, Saitama University, 255 Shimo-Okubo, Sakura-ku, Saitama-shi, Saitama 338-8570,
Binary SIFT: Towards Efficient Feature Matching Verification for Image Search
 Binary SIFT: Towards Efficient Feature Matching Verification for Image Search Wengang Zhou 1, Houqiang Li 2, Meng Wang 3, Yijuan Lu 4, Qi Tian 1 Dept. of Computer Science, University of Texas at San Antonio
Binary SIFT: Towards Efficient Feature Matching Verification for Image Search Wengang Zhou 1, Houqiang Li 2, Meng Wang 3, Yijuan Lu 4, Qi Tian 1 Dept. of Computer Science, University of Texas at San Antonio
Patch Descriptors. CSE 455 Linda Shapiro
 Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Patch Descriptors CSE 455 Linda Shapiro How can we find corresponding points? How can we find correspondences? How do we describe an image patch? How do we describe an image patch? Patches with similar
Perception IV: Place Recognition, Line Extraction
 Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Perception IV: Place Recognition, Line Extraction Davide Scaramuzza University of Zurich Margarita Chli, Paul Furgale, Marco Hutter, Roland Siegwart 1 Outline of Today s lecture Place recognition using
Lost in Quantization: Improving Particular Object Retrieval in Large Scale Image Databases
 Lost in Quantization: Improving Particular Object Retrieval in Large Scale Image Databases James Philbin 1, Ondřej Chum 2, Michael Isard 3, Josef Sivic 4, Andrew Zisserman 1 1 Visual Geometry Group, Department
Lost in Quantization: Improving Particular Object Retrieval in Large Scale Image Databases James Philbin 1, Ondřej Chum 2, Michael Isard 3, Josef Sivic 4, Andrew Zisserman 1 1 Visual Geometry Group, Department
Learning a Fine Vocabulary
 Learning a Fine Vocabulary Andrej Mikulík, Michal Perdoch, Ondřej Chum, and Jiří Matas CMP, Dept. of Cybernetics, Faculty of EE, Czech Technical University in Prague Abstract. We present a novel similarity
Learning a Fine Vocabulary Andrej Mikulík, Michal Perdoch, Ondřej Chum, and Jiří Matas CMP, Dept. of Cybernetics, Faculty of EE, Czech Technical University in Prague Abstract. We present a novel similarity
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Motion Estimation and Optical Flow Tracking
 Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Image Matching Image Retrieval Object Recognition Motion Estimation and Optical Flow Tracking Example: Mosiacing (Panorama) M. Brown and D. G. Lowe. Recognising Panoramas. ICCV 2003 Example 3D Reconstruction
Feature Detection. Raul Queiroz Feitosa. 3/30/2017 Feature Detection 1
 Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Feature Detection Raul Queiroz Feitosa 3/30/2017 Feature Detection 1 Objetive This chapter discusses the correspondence problem and presents approaches to solve it. 3/30/2017 Feature Detection 2 Outline
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study
 Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Local Features and Kernels for Classifcation of Texture and Object Categories: A Comprehensive Study J. Zhang 1 M. Marszałek 1 S. Lazebnik 2 C. Schmid 1 1 INRIA Rhône-Alpes, LEAR - GRAVIR Montbonnot, France
Using Geometric Blur for Point Correspondence
 1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
1 Using Geometric Blur for Point Correspondence Nisarg Vyas Electrical and Computer Engineering Department, Carnegie Mellon University, Pittsburgh, PA Abstract In computer vision applications, point correspondence
Image Retrieval with a Visual Thesaurus
 2010 Digital Image Computing: Techniques and Applications Image Retrieval with a Visual Thesaurus Yanzhi Chen, Anthony Dick and Anton van den Hengel School of Computer Science The University of Adelaide
2010 Digital Image Computing: Techniques and Applications Image Retrieval with a Visual Thesaurus Yanzhi Chen, Anthony Dick and Anton van den Hengel School of Computer Science The University of Adelaide
Landmark Recognition: State-of-the-Art Methods in a Large-Scale Scenario
 Landmark Recognition: State-of-the-Art Methods in a Large-Scale Scenario Magdalena Rischka and Stefan Conrad Institute of Computer Science Heinrich-Heine-University Duesseldorf D-40225 Duesseldorf, Germany
Landmark Recognition: State-of-the-Art Methods in a Large-Scale Scenario Magdalena Rischka and Stefan Conrad Institute of Computer Science Heinrich-Heine-University Duesseldorf D-40225 Duesseldorf, Germany
Efficient Representation of Local Geometry for Large Scale Object Retrieval
 Efficient Representation of Local Geometry for Large Scale Object Retrieval Michal Perd och, Ondřej Chum and Jiří Matas Center for Machine Perception, Department of Cybernetics Faculty of Electrical Engineering,
Efficient Representation of Local Geometry for Large Scale Object Retrieval Michal Perd och, Ondřej Chum and Jiří Matas Center for Machine Perception, Department of Cybernetics Faculty of Electrical Engineering,
Indexing local features and instance recognition May 16 th, 2017
 Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Indexing local features and instance recognition May 16 th, 2017 Yong Jae Lee UC Davis Announcements PS2 due next Monday 11:59 am 2 Recap: Features and filters Transforming and describing images; textures,
Classifying Images with Visual/Textual Cues. By Steven Kappes and Yan Cao
 Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Classifying Images with Visual/Textual Cues By Steven Kappes and Yan Cao Motivation Image search Building large sets of classified images Robotics Background Object recognition is unsolved Deformable shaped
Evaluation of GIST descriptors for web scale image search
 Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Evaluation of GIST descriptors for web scale image search Matthijs Douze Hervé Jégou, Harsimrat Sandhawalia, Laurent Amsaleg and Cordelia Schmid INRIA Grenoble, France July 9, 2009 Evaluation of GIST for
Comparing Local Feature Descriptors in plsa-based Image Models
 Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Comparing Local Feature Descriptors in plsa-based Image Models Eva Hörster 1,ThomasGreif 1, Rainer Lienhart 1, and Malcolm Slaney 2 1 Multimedia Computing Lab, University of Augsburg, Germany {hoerster,lienhart}@informatik.uni-augsburg.de
Beyond Bags of features Spatial information & Shape models
 Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Beyond Bags of features Spatial information & Shape models Jana Kosecka Many slides adapted from S. Lazebnik, FeiFei Li, Rob Fergus, and Antonio Torralba Detection, recognition (so far )! Bags of features
Indexing local features and instance recognition May 14 th, 2015
 Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
Indexing local features and instance recognition May 14 th, 2015 Yong Jae Lee UC Davis Announcements PS2 due Saturday 11:59 am 2 We can approximate the Laplacian with a difference of Gaussians; more efficient
A Comparison of SIFT, PCA-SIFT and SURF
 A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
A Comparison of SIFT, PCA-SIFT and SURF Luo Juan Computer Graphics Lab, Chonbuk National University, Jeonju 561-756, South Korea qiuhehappy@hotmail.com Oubong Gwun Computer Graphics Lab, Chonbuk National
Efficient Re-ranking in Vocabulary Tree based Image Retrieval
 Efficient Re-ranking in Vocabulary Tree based Image Retrieval Xiaoyu Wang 2, Ming Yang 1, Kai Yu 1 1 NEC Laboratories America, Inc. 2 Dept. of ECE, Univ. of Missouri Cupertino, CA 95014 Columbia, MO 65211
Efficient Re-ranking in Vocabulary Tree based Image Retrieval Xiaoyu Wang 2, Ming Yang 1, Kai Yu 1 1 NEC Laboratories America, Inc. 2 Dept. of ECE, Univ. of Missouri Cupertino, CA 95014 Columbia, MO 65211
Features Points. Andrea Torsello DAIS Università Ca Foscari via Torino 155, Mestre (VE)
") Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
Features Points Andrea Torsello DAIS Università Ca Foscari via Torino 155, 30172 Mestre (VE) Finding Corners Edge detectors perform poorly at corners. Corners provide repeatable points for matching, so
CLSH: Cluster-based Locality-Sensitive Hashing
 CLSH: Cluster-based Locality-Sensitive Hashing Xiangyang Xu Tongwei Ren Gangshan Wu Multimedia Computing Group, State Key Laboratory for Novel Software Technology, Nanjing University xiangyang.xu@smail.nju.edu.cn
CLSH: Cluster-based Locality-Sensitive Hashing Xiangyang Xu Tongwei Ren Gangshan Wu Multimedia Computing Group, State Key Laboratory for Novel Software Technology, Nanjing University xiangyang.xu@smail.nju.edu.cn
Efficient Similarity Search in Scientific Databases with Feature Signatures
 DATA MANAGEMENT AND DATA EXPLORATION GROUP Prof. Dr. rer. nat. Thomas Seidl DATA MANAGEMENT AND DATA EXPLORATION GROUP Prof. Dr. rer. nat. Thomas Seidl Efficient Similarity Search in Scientific Databases
DATA MANAGEMENT AND DATA EXPLORATION GROUP Prof. Dr. rer. nat. Thomas Seidl DATA MANAGEMENT AND DATA EXPLORATION GROUP Prof. Dr. rer. nat. Thomas Seidl Efficient Similarity Search in Scientific Databases
ImageCLEF 2011
 SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
SZTAKI @ ImageCLEF 2011 Bálint Daróczy joint work with András Benczúr, Róbert Pethes Data Mining and Web Search Group Computer and Automation Research Institute Hungarian Academy of Sciences Training/test
Instance-level recognition
 Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Instance-level recognition 1) Local invariant features 2) Matching and recognition with local features 3) Efficient visual search 4) Very large scale indexing Matching of descriptors Matching and 3D reconstruction
Bag-of-features. Cordelia Schmid
 Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Bag-of-features for category classification Cordelia Schmid Visual search Particular objects and scenes, large databases Category recognition Image classification: assigning a class label to the image
Feature Detection and Matching
 and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
and Matching CS4243 Computer Vision and Pattern Recognition Leow Wee Kheng Department of Computer Science School of Computing National University of Singapore Leow Wee Kheng (CS4243) Camera Models 1 /
Supervised learning. y = f(x) function
 function") Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Supervised learning y = f(x) output prediction function Image feature Training: given a training set of labeled examples {(x 1,y 1 ),, (x N,y N )}, estimate the prediction function f by minimizing the
Selection of Scale-Invariant Parts for Object Class Recognition
 Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Selection of Scale-Invariant Parts for Object Class Recognition Gy. Dorkó and C. Schmid INRIA Rhône-Alpes, GRAVIR-CNRS 655, av. de l Europe, 3833 Montbonnot, France fdorko,schmidg@inrialpes.fr Abstract
Local Features and Bag of Words Models
 10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
10/14/11 Local Features and Bag of Words Models Computer Vision CS 143, Brown James Hays Slides from Svetlana Lazebnik, Derek Hoiem, Antonio Torralba, David Lowe, Fei Fei Li and others Computer Engineering
Outline 7/2/201011/6/
 Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
Outline Pattern recognition in computer vision Background on the development of SIFT SIFT algorithm and some of its variations Computational considerations (SURF) Potential improvement Summary 01 2 Pattern
OBJECT CATEGORIZATION
 OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
OBJECT CATEGORIZATION Ing. Lorenzo Seidenari e-mail: seidenari@dsi.unifi.it Slides: Ing. Lamberto Ballan November 18th, 2009 What is an Object? Merriam-Webster Definition: Something material that may be
Part-based and local feature models for generic object recognition
 Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Part-based and local feature models for generic object recognition May 28 th, 2015 Yong Jae Lee UC Davis Announcements PS2 grades up on SmartSite PS2 stats: Mean: 80.15 Standard Dev: 22.77 Vote on piazza
Key properties of local features
 Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Key properties of local features Locality, robust against occlusions Must be highly distinctive, a good feature should allow for correct object identification with low probability of mismatch Easy to etract
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs
 Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
Modeling and Recognition of Landmark Image Collections Using Iconic Scene Graphs Xiaowei Li, Changchang Wu, Christopher Zach, Svetlana Lazebnik, Jan-Michael Frahm 1 Motivation Target problem: organizing
An Effective Image Retrieval Mechanism Using Family-based Spatial Consistency Filtration with Object Region
 International Journal of Automation and Computing 7(1), February 2010, 23-30 DOI: 10.1007/s11633-010-0023-9 An Effective Image Retrieval Mechanism Using Family-based Spatial Consistency Filtration with
International Journal of Automation and Computing 7(1), February 2010, 23-30 DOI: 10.1007/s11633-010-0023-9 An Effective Image Retrieval Mechanism Using Family-based Spatial Consistency Filtration with
Faster-than-SIFT Object Detection
 Faster-than-SIFT Object Detection Borja Peleato and Matt Jones peleato@stanford.edu, mkjones@cs.stanford.edu March 14, 2009 1 Introduction As computers become more powerful and video processing schemes
Faster-than-SIFT Object Detection Borja Peleato and Matt Jones peleato@stanford.edu, mkjones@cs.stanford.edu March 14, 2009 1 Introduction As computers become more powerful and video processing schemes
SHOT-BASED OBJECT RETRIEVAL FROM VIDEO WITH COMPRESSED FISHER VECTORS. Luca Bertinetto, Attilio Fiandrotti, Enrico Magli
 SHOT-BASED OBJECT RETRIEVAL FROM VIDEO WITH COMPRESSED FISHER VECTORS Luca Bertinetto, Attilio Fiandrotti, Enrico Magli Dipartimento di Elettronica e Telecomunicazioni, Politecnico di Torino (Italy) ABSTRACT
SHOT-BASED OBJECT RETRIEVAL FROM VIDEO WITH COMPRESSED FISHER VECTORS Luca Bertinetto, Attilio Fiandrotti, Enrico Magli Dipartimento di Elettronica e Telecomunicazioni, Politecnico di Torino (Italy) ABSTRACT
String distance for automatic image classification
 String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
String distance for automatic image classification Nguyen Hong Thinh*, Le Vu Ha*, Barat Cecile** and Ducottet Christophe** *University of Engineering and Technology, Vietnam National University of HaNoi,
DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors
 DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors 林彥宇副研究員 Yen-Yu Lin, Associate Research Fellow 中央研究院資訊科技創新研究中心 Research Center for IT Innovation, Academia
DescriptorEnsemble: An Unsupervised Approach to Image Matching and Alignment with Multiple Descriptors 林彥宇副研究員 Yen-Yu Lin, Associate Research Fellow 中央研究院資訊科技創新研究中心 Research Center for IT Innovation, Academia
TRECVid 2013 Experiments at Dublin City University
 TRECVid 2013 Experiments at Dublin City University Zhenxing Zhang, Rami Albatal, Cathal Gurrin, and Alan F. Smeaton INSIGHT Centre for Data Analytics Dublin City University Glasnevin, Dublin 9, Ireland
TRECVid 2013 Experiments at Dublin City University Zhenxing Zhang, Rami Albatal, Cathal Gurrin, and Alan F. Smeaton INSIGHT Centre for Data Analytics Dublin City University Glasnevin, Dublin 9, Ireland
Distributed Kd-Trees for Retrieval from Very Large Image Collections
 ALY et al.: DISTRIBUTED KD-TREES FOR RETRIEVAL FROM LARGE IMAGE COLLECTIONS1 Distributed Kd-Trees for Retrieval from Very Large Image Collections Mohamed Aly 1 malaa@vision.caltech.edu Mario Munich 2 mario@evolution.com
ALY et al.: DISTRIBUTED KD-TREES FOR RETRIEVAL FROM LARGE IMAGE COLLECTIONS1 Distributed Kd-Trees for Retrieval from Very Large Image Collections Mohamed Aly 1 malaa@vision.caltech.edu Mario Munich 2 mario@evolution.com
Paper Presentation. Total Recall: Automatic Query Expansion with a Generative Feature Model for Object Retrieval
 Paper Presentation Total Recall: Automatic Query Expansion with a Generative Feature Model for Object Retrieval 02/12/2015 -Bhavin Modi 1 Outline Image description Scaling up visual vocabularies Search
Paper Presentation Total Recall: Automatic Query Expansion with a Generative Feature Model for Object Retrieval 02/12/2015 -Bhavin Modi 1 Outline Image description Scaling up visual vocabularies Search