Chapters 1 7: Overview
|
|
|
- Maude Wood
- 5 years ago
- Views:
Transcription
1 Chapters 1 7: Overview Photogrammetric mapping: introduction, applications, and tools GNSS/INS-assisted photogrammetric and LiDAR mapping LiDAR mapping: principles, applications, mathematical model, and error sources and their impact. QA/QC of LiDAR mapping Registration of Laser scanning data Point cloud characterization, segmentation, and QC This chapter will be focusing on LiDAR-based orthophoto and Digital Terrain Model (DTM) generation. 1
2 Chapter 8 OCCLUSION-BASED PROCEDURE FOR TRUE ORTHOPHOTO GENERATION AND LIDAR DATA CLASSIFICATION 2
3 Overview Introduction Orthophoto generation Literature review Procedure LiDAR data classification Literature review Procedure Experimental results Concluding remarks 3
4 True Orthophoto Generation 4
5 Image and Map characteristics Image Perspective projection Non-uniform scale Relief displacement Image plane map object Orthogonal projection Uniform scale No relief displacement An orthophoto is a digital image which has the same characteristics of a map. 5
6 Perspective Image 6
7 Orthophoto 7
8 Orthophoto Generation: Prerequisites Digital image: Wide range of operational photogrammetric systems Interior Orientation Parameters (IOPs) of the used camera: Camera calibration procedure Exterior Orientation Parameters (EOPs) of that image: Image georeferencing techniques Digital Surface Model (DSM) or Digital Terrain Model (DTM) LiDAR, imagery, Radar, 8
9 Differential Orthophoto Generation Digital Image PC g(x, y) (resampling) Backward Projection (EOP & IOP) 9 Z(X, Y) (X, Y) Interpolation G(X, Y) = g (x, y) Terrain Datum
10 Differential Orthophoto Generation perspective center imagery D A B C Digital Surface Model Orthophoto ghost image/double-mapped area 10

11 Differential Orthophoto Generation Double-mapped areas Original Imagery Generated Orthophoto 11
12 Orthophoto Generation & Visibility Analysis Digital Image PC Indirect (backward) transformation 12
13 True Orthophoto Process Existing Method Z-Buffer Method perspective center a b c imagery Invisible point D C longer D P.C A B C Digital Surface Model Orthophoto 13

14 True Orthophoto Process Existing Method Z-Buffer Method Original Imagery Generated True Orthophoto 14

15 True Orthophoto Process Existing Method Z-Buffer Method Generated True Orthophoto 15
16 True Orthophoto Generation Angle-based Method perspective center point angle comparison A 5 > max angle visible / hidden 0 visible B 12 > 5 visible C 15 > 12 visible D 14 <= 15 invisible Invisible point C B > E visible Digital Surface Model E D A Nadir point Orthophoto 16
17 True Orthophoto Generation Angle-based Method 0 0 i i Radial Sweep for the Angle-Based Method 17
18 True Orthophoto Gen.: Adaptive Radial Sweep row column DSM section 3 section 2 section 1 nadir point DSM partitioning for the adaptive radial sweep method 18
19 True Orthophoto Gen.: Spiral Sweep column DSM row nadir point target point Conceptual procedural flow of the spiral sweep method 19


20 Comparative Analysis Differential rectification Z-buffer method Angle-based (adaptive radial sweep) method 20 Angle-based (spiral sweep) method


21 Original Image 21


22 LiDAR Surface Model Elevation Data Intensity Data 22
23 Orthophoto with Ghost Images 23
24 True Orthophoto without Ghost Images 24
25 True Orthophoto After Occlusion Filling 25
26 Occlusion Extension Angle-based Method perspective center point angle comparison A 5 > max angle visible / hidden 0 visible B 12 > 5 visible C 15 > 12 visible D 14 <= 15 invisible Invisible point C B > E visible Digital Surface Model E D A Nadir point Orthophoto 26
27 True Orthophoto After Occlusion Filling 27
28 True Orthophoto After Occlusion Extension 28

29 True Orthophoto After Boundary Enhancement 29

30 Orthophoto with Ghost Images 30

31 True Orthophoto without Ghost Images 31

32 True Orthophoto After Occlusion Filling 32
33 True Orthophoto After Occlusion Extension 33
34 True Orthophoto After Boundary Enhancement 34
35 Classification of LiDAR Data (Ground/Non-Ground Points) 35
36 LiDAR Classification: Introduction LiDAR data includes ground/terrain and non-ground/offterrain points. Knowledge of the terrain is useful for deriving contour lines, road network planning, and flood monitoring. Knowledge of the off-terrain points is useful for DBM detection, DBM reconstruction, 3D city modeling, and 3D visualization. Knowledge of terrain and off-terrain points is useful for change detection applications. 36
 covering it Non-ground: Vegetation and artificial features How to distinguish ground points from non-ground points in LiDAR data?")
37 LiDAR Classification: Introduction Definition of ground/nonground (Sithole & Vosselman, 2003) Ground: Topsoil or any thin layering (asphalt, pavement, etc.) covering it Non-ground: Vegetation and artificial features How to distinguish ground points from non-ground points in LiDAR data? Ground Profile Non-Ground Profile LiDAR Profile 37


38 LiDAR Classification: Literature Categories (Sithole & Vosselman 2003): Slope-based Block-minimum Surface-based Clustering/segmentation 38
39 LiDAR Classification: Literature Review Modified Block Minimum (Wack and Wimmer, 2002) Modified Slope-based Filter (Vosselman, 2000) Morphological Filter (Zhang et al., 2003) Active Contour (Elmqvist et al., 2001) Progressive TIN Densification (Axelsson, 2000) Robust Interpolation (Pfeifer et al., 2001) Spline Interpolation (Brovelli et al., 2002) 39

40 LiDAR Classification: Concept Assumption: Non-ground objects produce occlusions in synthesized perspective views. Search for occlusions Nonground objects can be detected as those causing occlusions. Perspective Projection 40
41 LiDAR Classification: Processing Flow 41
42 LiDAR Classification: Methodology LiDAR data is irregularly distributed. We start by interpolating the LiDAR data. The average point density is used to estimate the optimum GSD for resampling. We use the nearest neighbor interpolation to avoid blurring the height discontinuities. Point B The j th Column Point C DSM( i, j ) = Height of Point B Point A The i th Row 42
43 LiDAR Classification: Methodology If there is more than 1 point located in a given cell, we pick the one with the lowest height and assign its height to that cell. Point B Point A The j th Column Point C The i th Row DSM( i, j ) = Height of Point C 43
44 LiDAR Classification: Methodology PC Occlusion Detection (Angle-based) B A Off-Nadir Angle Visible Point (B) D A B C E E D E: Occlusion!!! C B D C Visible Point (C) Last Visible Point (D) Visible Point (D) Nadir Point A B C D E First Occluded Point (E) 44
45 LiDAR Classification: Methodology PC Detect the Points Causing Occlusion D C: Non-Ground B: Ground C E B E C E Last Visible Point D: Non-Ground B Nadir Point First Occluded Point B C D E Non-Ground 45
46 LiDAR Classification: Methodology How can we maximize our ability to detect the majority of non-ground objects? Manipulate the location & number of synthesized projection center(s) 46
47 LiDAR Classification: Methodology Non-ground points detected from projection centers with different horizontal locations 47
48 LiDAR Classification: Methodology Non-ground points detected from projection centers with different vertical locations 48
49 LiDAR Classification: Methodology PC A PC B Two opposite projection centers will allow for the detection of a larger nonground area Detected Non- Ground Points From PC B Detected Non- Ground Points From PC A Combined Results 49
50 LiDAR Classification: Methodology The eight neighbors of any given pixel are checked to see if they are occluded by that pixel or not. 50
51 LiDAR Classification: Methodology PC1 For Pixel A PC 2 For Pixel A d PC 3 For Pixel A PC 8 For Pixel A B A PC 4 For Pixel A PC 5 For Pixel A d PC 7 For Pixel A PC 6 For Pixel A d d 51
52 LiDAR Classification: Methodology PC 2 For Pixel B PC 3 For Pixel B d PC 1 For Pixel B PC 8 For Pixel B B A PC 4 For Pixel B PC 7 For Pixel B d PC 6 For Pixel B PC 5 For Pixel B d d 52
53 LiDAR Classification: Methodology Perspective Center 1 For Pixel A Perspective Center 2 For Pixel A d Perspective Center 3 For Pixel A Perspective Center 8 For Pixel A B A Perspective Center 4 For Pixel A 45 Degree Perspective Center 5 For Pixel A d Perspective Center 7 For Pixel A Perspective Center 6 For Pixel A d d The eight neighbors of any given pixel are checked to see if they are occluded by that pixel or not. 53
54 LiDAR Classification: Results Simulated Dataset Misclassified ground points Simulated Dataset DSM Identified Occluding Points (in white) 54
55 LiDAR Classification: Methodology Multiple projection centers at pre-specified locations will: + Improve our capability of detecting non-ground points Useful when dealing with large and low buildings Enhance the noise and high-frequency components of the terrain Will lead to false hypotheses regarding instances of non-ground points Solution: implement a statistical filter to refine the occlusion-based terrain/off-terrain classification procedure 55
56 LiDAR Classification: Methodology Points producing occlusions (hypothesized off-terrain point): True non-ground points + false non-ground points Points not producing occlusions (hypothesized terrain point): True ground points + false ground points Less probable DSM Identified Occluding Points (in white) 56
57 LiDAR Classification: Filtering We designed a statistical filter to remove the effects of terrain roughness (e.g., noise in the LiDAR data and high frequency components of the surface cliffs). The elevation h of the ground points can be assumed to be normally distributed with a mean μ and standard deviation σ. Frequency Height 57
58 LiDAR Classification: Filtering For each DSM cell, we define a local neighborhood that is adaptively expanded until a pre-defined number of terrain points is located. Derive a histogram of the terrain point elevations Threshold Ground : Threshold for modifying non-ground points Threshold : Threshold for modifying ground points Non ground Threshold Outlier : Threshold for detecting low outliers Threshold Non ground Threshold Outlier Threshold Ground Outliers Ground Non-Ground Frequency Height 58

59 LiDAR Classification: Filtering Examples of outliers: multi-path errors, errors in the laser range finder 59


60 LiDAR Classification: Filtering Outlier Height TARGET Ground Height TARGET Ground Height TARGET Non ground Height TARGET Non ground Height TARGET Ground Height TARGET Keep it Non ground Height TARGET Ground Height TARGET Outlier Ground Non-Ground Ground Non-Ground Threshold Outlier Frequency Height Height 60
61 LiDAR Classification: Point Cloud Class. If a cell is classified as non-ground, all the LiDAR points in that cell are classified as nonground points. If the cell is classified as a ground point, then The lowest LiDAR point in that cell is classified as ground. The LiDAR points that are at least 20 cm higher than the lowest LiDAR point are classified as nonground points. The i th Column The j th Row Point B Point C Point A DSM( i, j ) = Height of Point C Point A Non-ground 20cm Point B Ground Point C (Ground) 61


62 LiDAR Classification: Results Simulated Dataset DSM Classification Results without filter 62 Classification Results using filter

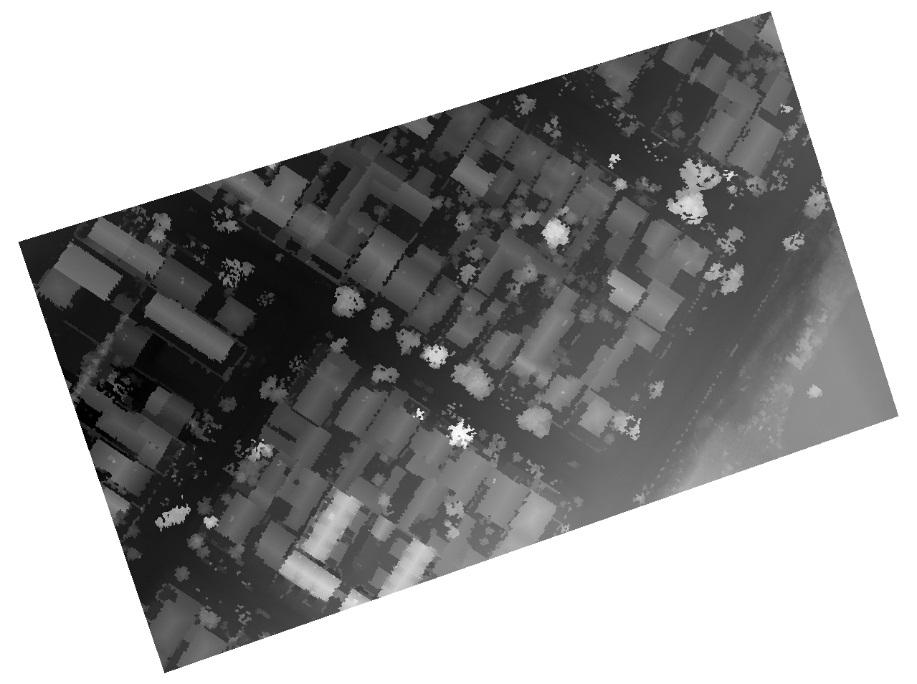
63 LiDAR Classification: Results Real Dataset (1 - Brazil) 63
64 LiDAR Classification: Results Real Dataset (1 - Brazil) Occluding points in white 64
65 LiDAR Classification: Results Real Dataset (1 - Brazil) After Statistical Filtering 65

 DSM")
66 LiDAR Classification: Results Real Dataset (1 - Brazil) DSM Non-ground objects 66
67 LiDAR Classification: Results Real Dataset (1 - Brazil) Using the LiDAR DSM and an orthophoto over the same area, we manually generated a ground truth for ground and non-ground points classification. Comparing our result with the ground truth, the number of misclassified points divided by the total number of points was found to be 4.7%. 67
")

68 LiDAR Classification: Results Real Dataset (1 - Brazil) Misclassified Points Misclassified Points displayed on DSM 68

")
69 LiDAR Classification: Results Real Dataset (1 - Brazil) Original DSM Derived DTM 69




70 LiDAR Classification: Results Real Dataset (2 - Stuttgart) Discontinuous Terrain: Tunnels DSM Occluding Points Non-ground Points 70



71 LiDAR Classification: Results Real Dataset (2 - Stuttgart) Occluding Points DSM 71 Non-ground Points



72 LiDAR Classification: Results Real Dataset (2 - Stuttgart) DSM Occluding Points Non-ground Points 72
 A ROI near the University of Calgary is")

73 LiDAR Classification: Results Real Dataset (3 - Calgary) A ROI near the University of Calgary is selected as an experimental data. The Transit Train trail extends into a tunnel under the ground. 73
")

74 LiDAR Classification: Results Real Dataset (3 - Calgary) Non-ground points (TerraScan) Non-ground points (Occlusion-based) 74
75 LiDAR Classification: Results Real Dataset (3 - Calgary) TerraScan s Result Occlusion-Based Result 75
 Another ROI near the University station is")

76 LiDAR Classification: Results Real Dataset (3 - Calgary) Another ROI near the University station is selected as another experimental data. Complex contents The Transit Train station, Bridge, Ramps, and Trees. 76
")

77 LiDAR Classification: Results Real Dataset (3 - Calgary) Non-ground points (TerraScan) Non-ground points (Occlusion-Based Results) 77
78 LiDAR Classification: Results Real Dataset (3 - Calgary) TerraScan s Result Occlusion-Based Result 78
 Original LiDAR Points over UofC 79")
79 LiDAR Classification: Results Real Dataset (4 - Calgary) Original LiDAR Points over UofC 79
 Aerial Photo over")
80 LiDAR Classification: Results Real Dataset (4 - Calgary) Aerial Photo over UofC 80
 Ground/Non-Ground")
81 LiDAR Classification: Results Real Dataset (4 - Calgary) Ground/Non-Ground Points 81
82 LiDAR Classification: Conclusion The achieved results proved the feasibility of the suggested procedure. Default parameters are sufficient for most cases. The proposed procedure is capable of handling urban areas with complex contents: Tall buildings, low and nearby buildings, trees, bushes, fences, bridges, ramps, cliffs, tunnels, etc. Future work will focus on further testing of the proposed methodology as well as improving its efficiency. Also, the classified non-ground points will be further classified into vegetation and man-made structures. Building detection and change detection 82


83 Comments and Questions? 83
AUTOMATIC GENERATION OF DIGITAL BUILDING MODELS FOR COMPLEX STRUCTURES FROM LIDAR DATA
 AUTOMATIC GENERATION OF DIGITAL BUILDING MODELS FOR COMPLEX STRUCTURES FROM LIDAR DATA Changjae Kim a, Ayman Habib a, *, Yu-Chuan Chang a a Geomatics Engineering, University of Calgary, Canada - habib@geomatics.ucalgary.ca,
AUTOMATIC GENERATION OF DIGITAL BUILDING MODELS FOR COMPLEX STRUCTURES FROM LIDAR DATA Changjae Kim a, Ayman Habib a, *, Yu-Chuan Chang a a Geomatics Engineering, University of Calgary, Canada - habib@geomatics.ucalgary.ca,
CE 59700: LASER SCANNING
 Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
Digital Photogrammetry Research Group Lyles School of Civil Engineering Purdue University, USA Webpage: http://purdue.edu/ce/ Email: ahabib@purdue.edu CE 59700: LASER SCANNING 1 Contact Information Instructor:
REFINEMENT OF FILTERED LIDAR DATA USING LOCAL SURFACE PROPERTIES INTRODUCTION
 REFINEMENT OF FILTERED LIDAR DATA USING LOCAL SURFACE PROPERTIES Suyoung Seo, Senior Research Associate Charles G. O Hara, Associate Research Professor GeoResources Institute Mississippi State University
REFINEMENT OF FILTERED LIDAR DATA USING LOCAL SURFACE PROPERTIES Suyoung Seo, Senior Research Associate Charles G. O Hara, Associate Research Professor GeoResources Institute Mississippi State University
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Cadastre - Preliminary Results
 Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Chapters 1-4: Summary
 Chapters 1-4: Summary So far, we have been investigating the image acquisition process. Chapter 1: General introduction Chapter 2: Radiation source and properties Chapter 3: Radiation interaction with
Chapters 1-4: Summary So far, we have been investigating the image acquisition process. Chapter 1: General introduction Chapter 2: Radiation source and properties Chapter 3: Radiation interaction with
[Youn *, 5(11): November 2018] ISSN DOI /zenodo Impact Factor
![[Youn *, 5(11): November 2018] ISSN DOI /zenodo Impact Factor](/thumbs/91/105079225.jpg "[Youn *, 5(11): November 2018] ISSN DOI /zenodo Impact Factor") GLOBAL JOURNAL OF ENGINEERING SCIENCE AND RESEARCHES AUTOMATIC EXTRACTING DEM FROM DSM WITH CONSECUTIVE MORPHOLOGICAL FILTERING Junhee Youn *1 & Tae-Hoon Kim 2 *1,2 Korea Institute of Civil Engineering
GLOBAL JOURNAL OF ENGINEERING SCIENCE AND RESEARCHES AUTOMATIC EXTRACTING DEM FROM DSM WITH CONSECUTIVE MORPHOLOGICAL FILTERING Junhee Youn *1 & Tae-Hoon Kim 2 *1,2 Korea Institute of Civil Engineering
Tutorial (Intermediate level): Dense Cloud Classification and DTM generation with Agisoft PhotoScan Pro 1.1
: Dense Cloud Classification and DTM generation with Agisoft PhotoScan Pro 1.1") Tutorial (Intermediate level): Dense Cloud Classification and DTM generation with Agisoft PhotoScan Pro 1.1 This tutorial illustrates how to perform dense point cloud classification in manual and automatic
Tutorial (Intermediate level): Dense Cloud Classification and DTM generation with Agisoft PhotoScan Pro 1.1 This tutorial illustrates how to perform dense point cloud classification in manual and automatic
Ground and Non-Ground Filtering for Airborne LIDAR Data
 Cloud Publications International Journal of Advanced Remote Sensing and GIS 2016, Volume 5, Issue 1, pp. 1500-1506 ISSN 2320-0243, Crossref: 10.23953/cloud.ijarsg.41 Research Article Open Access Ground
Cloud Publications International Journal of Advanced Remote Sensing and GIS 2016, Volume 5, Issue 1, pp. 1500-1506 ISSN 2320-0243, Crossref: 10.23953/cloud.ijarsg.41 Research Article Open Access Ground
UCGE Reports Number 20282
 UCGE Reports Number 20282 Department of Geomatics Engineering Integration of Photogrammetric and LiDAR Data for Accurate Reconstruction and Visualization of Urban Environments (URL: http://www.geomatics.ucalgary.ca/research/publications)
UCGE Reports Number 20282 Department of Geomatics Engineering Integration of Photogrammetric and LiDAR Data for Accurate Reconstruction and Visualization of Urban Environments (URL: http://www.geomatics.ucalgary.ca/research/publications)
Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas
 Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas Nizar ABO AKEL, Ofer ZILBERSTEIN and Yerach DOYTSHER, Israel Key words: LIDAR, DSM, urban areas, DTM extraction. SUMMARY Although LIDAR
Automatic DTM Extraction from Dense Raw LIDAR Data in Urban Areas Nizar ABO AKEL, Ofer ZILBERSTEIN and Yerach DOYTSHER, Israel Key words: LIDAR, DSM, urban areas, DTM extraction. SUMMARY Although LIDAR
FOOTPRINTS EXTRACTION
 Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
Building Footprints Extraction of Dense Residential Areas from LiDAR data KyoHyouk Kim and Jie Shan Purdue University School of Civil Engineering 550 Stadium Mall Drive West Lafayette, IN 47907, USA {kim458,
CO-REGISTERING AND NORMALIZING STEREO-BASED ELEVATION DATA TO SUPPORT BUILDING DETECTION IN VHR IMAGES
 CO-REGISTERING AND NORMALIZING STEREO-BASED ELEVATION DATA TO SUPPORT BUILDING DETECTION IN VHR IMAGES Alaeldin Suliman, Yun Zhang, Raid Al-Tahir Department of Geodesy and Geomatics Engineering, University
CO-REGISTERING AND NORMALIZING STEREO-BASED ELEVATION DATA TO SUPPORT BUILDING DETECTION IN VHR IMAGES Alaeldin Suliman, Yun Zhang, Raid Al-Tahir Department of Geodesy and Geomatics Engineering, University
HEIGHT GRADIENT APPROACH FOR OCCLUSION DETECTION IN UAV IMAGERY
 HEIGHT GRADIENT APPROACH FOR OCCLUSION DETECTION IN UAV IMAGERY H. C. Oliveira a, A. F. Habib b, A. P. Dal Poz c, M. Galo c a São Paulo State University, Graduate Program in Cartographic Sciences, Presidente
HEIGHT GRADIENT APPROACH FOR OCCLUSION DETECTION IN UAV IMAGERY H. C. Oliveira a, A. F. Habib b, A. P. Dal Poz c, M. Galo c a São Paulo State University, Graduate Program in Cartographic Sciences, Presidente
Improvement of the Edge-based Morphological (EM) method for lidar data filtering
 method for lidar data filtering") International Journal of Remote Sensing Vol. 30, No. 4, 20 February 2009, 1069 1074 Letter Improvement of the Edge-based Morphological (EM) method for lidar data filtering QI CHEN* Department of Geography,
International Journal of Remote Sensing Vol. 30, No. 4, 20 February 2009, 1069 1074 Letter Improvement of the Edge-based Morphological (EM) method for lidar data filtering QI CHEN* Department of Geography,
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN
 NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
NATIONWIDE POINT CLOUDS AND 3D GEO- INFORMATION: CREATION AND MAINTENANCE GEORGE VOSSELMAN OVERVIEW National point clouds Airborne laser scanning in the Netherlands Quality control Developments in lidar
APPLICABILITY ANALYSIS OF CLOTH SIMULATION FILTERING ALGORITHM FOR MOBILE LIDAR POINT CLOUD
 APPLICABILITY ANALYSIS OF CLOTH SIMULATION FILTERING ALGORITHM FOR MOBILE LIDAR POINT CLOUD Shangshu Cai 1,, Wuming Zhang 1,, Jianbo Qi 1,, Peng Wan 1,, Jie Shao 1,, Aojie Shen 1, 1 State Key Laboratory
APPLICABILITY ANALYSIS OF CLOTH SIMULATION FILTERING ALGORITHM FOR MOBILE LIDAR POINT CLOUD Shangshu Cai 1,, Wuming Zhang 1,, Jianbo Qi 1,, Peng Wan 1,, Jie Shao 1,, Aojie Shen 1, 1 State Key Laboratory
OCCLUSION DETECTION BY HEIGHT GRADIENT FOR TRUE ORTHOPHOTO GENERATION, USING LIDAR DATA
 OCCLUSION DETECTION BY HEIGHT GRADIENT FOR TRUE ORTHOPHOTO GENERATION, USING LIDAR DATA H. C. Oliveira a, M. Galo a, b a FCT/UNESP/PPGCC Faculty of Science and Technology, Univ Estadual Paulista, Postgraduate
OCCLUSION DETECTION BY HEIGHT GRADIENT FOR TRUE ORTHOPHOTO GENERATION, USING LIDAR DATA H. C. Oliveira a, M. Galo a, b a FCT/UNESP/PPGCC Faculty of Science and Technology, Univ Estadual Paulista, Postgraduate
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology. Maziana Muhamad
 Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Terrain Modeling and Mapping for Telecom Network Installation Using Scanning Technology Maziana Muhamad Summarising LiDAR (Airborne Laser Scanning) LiDAR is a reliable survey technique, capable of: acquiring
Comparison GRASS-LiDAR modules TerraScan with respect to vegetation filtering
 Comparison GRASS-LiDAR modules TerraScan with respect to vegetation filtering Sara Lucca sara.lucca@mail.polimi.it Maria Antonia Brovelli - maria.brovelli@polimi.it LiDAR system Detection system by a laser
Comparison GRASS-LiDAR modules TerraScan with respect to vegetation filtering Sara Lucca sara.lucca@mail.polimi.it Maria Antonia Brovelli - maria.brovelli@polimi.it LiDAR system Detection system by a laser
1. Introduction. A CASE STUDY Dense Image Matching Using Oblique Imagery Towards All-in- One Photogrammetry
 Submitted to GIM International FEATURE A CASE STUDY Dense Image Matching Using Oblique Imagery Towards All-in- One Photogrammetry Dieter Fritsch 1, Jens Kremer 2, Albrecht Grimm 2, Mathias Rothermel 1
Submitted to GIM International FEATURE A CASE STUDY Dense Image Matching Using Oblique Imagery Towards All-in- One Photogrammetry Dieter Fritsch 1, Jens Kremer 2, Albrecht Grimm 2, Mathias Rothermel 1
Classification of urban feature from unmanned aerial vehicle images using GASVM integration and multi-scale segmentation
 Classification of urban feature from unmanned aerial vehicle images using GASVM integration and multi-scale segmentation M.Modiri, A.Salehabadi, M.Mohebbi, A.M.Hashemi, M.Masumi National Geographical Organization
Classification of urban feature from unmanned aerial vehicle images using GASVM integration and multi-scale segmentation M.Modiri, A.Salehabadi, M.Mohebbi, A.M.Hashemi, M.Masumi National Geographical Organization
IMPROVED TARGET DETECTION IN URBAN AREA USING COMBINED LIDAR AND APEX DATA
 IMPROVED TARGET DETECTION IN URBAN AREA USING COMBINED LIDAR AND APEX DATA Michal Shimoni 1 and Koen Meuleman 2 1 Signal and Image Centre, Dept. of Electrical Engineering (SIC-RMA), Belgium; 2 Flemish
IMPROVED TARGET DETECTION IN URBAN AREA USING COMBINED LIDAR AND APEX DATA Michal Shimoni 1 and Koen Meuleman 2 1 Signal and Image Centre, Dept. of Electrical Engineering (SIC-RMA), Belgium; 2 Flemish
2. POINT CLOUD DATA PROCESSING
 Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
Point Cloud Generation from suas-mounted iphone Imagery: Performance Analysis A. D. Ladai, J. Miller Towill, Inc., 2300 Clayton Road, Suite 1200, Concord, CA 94520-2176, USA - (andras.ladai, jeffrey.miller)@towill.com
REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS. Y. Postolov, A. Krupnik, K. McIntosh
 REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS Y. Postolov, A. Krupnik, K. McIntosh Department of Civil Engineering, Technion Israel Institute of Technology, Haifa,
REGISTRATION OF AIRBORNE LASER DATA TO SURFACES GENERATED BY PHOTOGRAMMETRIC MEANS Y. Postolov, A. Krupnik, K. McIntosh Department of Civil Engineering, Technion Israel Institute of Technology, Haifa,
COMPONENTS. The web interface includes user administration tools, which allow companies to efficiently distribute data to internal or external users.
 COMPONENTS LASERDATA LIS is a software suite for LiDAR data (TLS / MLS / ALS) management and analysis. The software is built on top of a GIS and supports both point and raster data. The following software
COMPONENTS LASERDATA LIS is a software suite for LiDAR data (TLS / MLS / ALS) management and analysis. The software is built on top of a GIS and supports both point and raster data. The following software
ON MODELLING AND VISUALISATION OF HIGH RESOLUTION VIRTUAL ENVIRONMENTS USING LIDAR DATA
 Geoinformatics 2004 Proc. 12th Int. Conf. on Geoinformatics Geospatial Information Research: Bridging the Pacific and Atlantic University of Gävle, Sweden, 7-9 June 2004 ON MODELLING AND VISUALISATION
Geoinformatics 2004 Proc. 12th Int. Conf. on Geoinformatics Geospatial Information Research: Bridging the Pacific and Atlantic University of Gävle, Sweden, 7-9 June 2004 ON MODELLING AND VISUALISATION
INTEGRATION OF LIDAR AND AIRBORNE IMAGERY FOR REALISTIC VISUALIZATION OF 3D URBAN ENVIRONMENTS
 INTEGRATION OF LIDAR AND AIRBORNE IMAGERY FOR REALISTIC VISUALIZATION OF 3D URBAN ENVIRONMENTS A. F. Habib*, J. Kersting, T. M. McCaffrey, A. M. Y. Jarvis Dept. of Geomatics Engineering, The University
INTEGRATION OF LIDAR AND AIRBORNE IMAGERY FOR REALISTIC VISUALIZATION OF 3D URBAN ENVIRONMENTS A. F. Habib*, J. Kersting, T. M. McCaffrey, A. M. Y. Jarvis Dept. of Geomatics Engineering, The University
A SYSTEM OF THE SHADOW DETECTION AND SHADOW REMOVAL FOR HIGH RESOLUTION CITY AERIAL PHOTO
 A SYSTEM OF THE SHADOW DETECTION AND SHADOW REMOVAL FOR HIGH RESOLUTION CITY AERIAL PHOTO Yan Li a, Tadashi Sasagawa b, Peng Gong a,c a International Institute for Earth System Science, Nanjing University,
A SYSTEM OF THE SHADOW DETECTION AND SHADOW REMOVAL FOR HIGH RESOLUTION CITY AERIAL PHOTO Yan Li a, Tadashi Sasagawa b, Peng Gong a,c a International Institute for Earth System Science, Nanjing University,
POSITIONING A PIXEL IN A COORDINATE SYSTEM
 GEOREFERENCING AND GEOCODING EARTH OBSERVATION IMAGES GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF REMOTE SENSING AN INTRODUCTORY TEXTBOOK CHAPTER 6 POSITIONING A PIXEL IN A COORDINATE SYSTEM The essential
GEOREFERENCING AND GEOCODING EARTH OBSERVATION IMAGES GABRIEL PARODI STUDY MATERIAL: PRINCIPLES OF REMOTE SENSING AN INTRODUCTORY TEXTBOOK CHAPTER 6 POSITIONING A PIXEL IN A COORDINATE SYSTEM The essential
SPAR, ELMF 2013, Amsterdam. Laser Scanning on the UK Highways Agency Network. Hamish Grierson Blom Uk
 SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
SPAR, ELMF 2013, Amsterdam Laser Scanning on the UK Highways Agency Network Hamish Grierson Blom Uk www.blomasa.com www.blom-uk.co.uk Blom UK Part of the Blom Group Blom Group - Europe s largest aerial
New Requirements for the Relief in the Topographic Databases of the Institut Cartogràfic de Catalunya
 New Requirements for the Relief in the Topographic Databases of the Institut Cartogràfic de Catalunya Blanca Baella, Maria Pla Institut Cartogràfic de Catalunya, Barcelona, Spain Abstract Since 1983 the
New Requirements for the Relief in the Topographic Databases of the Institut Cartogràfic de Catalunya Blanca Baella, Maria Pla Institut Cartogràfic de Catalunya, Barcelona, Spain Abstract Since 1983 the
Introduction Photogrammetry Photos light Gramma drawing Metron measure Basic Definition The art and science of obtaining reliable measurements by mean
 Photogrammetry Review Neil King King and Associates Testing is an art Introduction Read the question Re-Read Read The question What is being asked Answer what is being asked Be in the know Exercise the
Photogrammetry Review Neil King King and Associates Testing is an art Introduction Read the question Re-Read Read The question What is being asked Answer what is being asked Be in the know Exercise the
AUTOMATIC BUILDING DETECTION FROM LIDAR POINT CLOUD DATA
 AUTOMATIC BUILDING DETECTION FROM LIDAR POINT CLOUD DATA Nima Ekhtari, M.R. Sahebi, M.J. Valadan Zoej, A. Mohammadzadeh Faculty of Geodesy & Geomatics Engineering, K. N. Toosi University of Technology,
AUTOMATIC BUILDING DETECTION FROM LIDAR POINT CLOUD DATA Nima Ekhtari, M.R. Sahebi, M.J. Valadan Zoej, A. Mohammadzadeh Faculty of Geodesy & Geomatics Engineering, K. N. Toosi University of Technology,
Technical Considerations and Best Practices in Imagery and LiDAR Project Procurement
 Technical Considerations and Best Practices in Imagery and LiDAR Project Procurement Presented to the 2014 WV GIS Conference By Brad Arshat, CP, EIT Date: June 4, 2014 Project Accuracy A critical decision
Technical Considerations and Best Practices in Imagery and LiDAR Project Procurement Presented to the 2014 WV GIS Conference By Brad Arshat, CP, EIT Date: June 4, 2014 Project Accuracy A critical decision
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
INTEGRATION OF DIFFERENT FILTER ALGORITHMS FOR IMPROVING THE GROUND SURFACE EXTRACTION FROM AIRBORNE LIDAR DATA
 8th International Symposium on Spatial Data Quality, 30 May - 1 June 013, Hong Kong INTEGRATION OF DIFFERENT FILTER ALGORITHMS FOR IMPROVING THE GROUND SURFACE EXTRACTION FROM AIRBORNE LIDAR DATA S.S.
8th International Symposium on Spatial Data Quality, 30 May - 1 June 013, Hong Kong INTEGRATION OF DIFFERENT FILTER ALGORITHMS FOR IMPROVING THE GROUND SURFACE EXTRACTION FROM AIRBORNE LIDAR DATA S.S.
Course Outline (1) #6 Data Acquisition for Built Environment. Fumio YAMAZAKI
 #6 Data Acquisition for Built Environment. Fumio YAMAZAKI") AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
AT09.98 Applied GIS and Remote Sensing for Disaster Mitigation #6 Data Acquisition for Built Environment 9 October, 2002 Fumio YAMAZAKI yamazaki@ait.ac.th http://www.star.ait.ac.th/~yamazaki/ Course Outline
Processing of airborne laser scanning data
 GIS-E1020 From measurements to maps Lecture 8 Processing of airborne laser scanning data Petri Rönnholm Aalto University 1 Learning objectives To realize error sources of Airborne laser scanning To understand
GIS-E1020 From measurements to maps Lecture 8 Processing of airborne laser scanning data Petri Rönnholm Aalto University 1 Learning objectives To realize error sources of Airborne laser scanning To understand
Evaluation and Improvements on Row-Column Order Bias and Grid Orientation Bias of the Progressive Morphological Filter of Lidar Data
 Utah State University DigitalCommons@USU T.W. "Doc" Daniel Experimental Forest Quinney Natural Resources Research Library, S.J. and Jessie E. 5-2011 Evaluation and Improvements on Row-Column Order Bias
Utah State University DigitalCommons@USU T.W. "Doc" Daniel Experimental Forest Quinney Natural Resources Research Library, S.J. and Jessie E. 5-2011 Evaluation and Improvements on Row-Column Order Bias
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION INTRODUCTION
 BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
BUILDING MODEL RECONSTRUCTION FROM DATA INTEGRATION Ruijin Ma Department Of Civil Engineering Technology SUNY-Alfred Alfred, NY 14802 mar@alfredstate.edu ABSTRACT Building model reconstruction has been
LIDAR MAPPING FACT SHEET
 1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
1. LIDAR THEORY What is lidar? Lidar is an acronym for light detection and ranging. In the mapping industry, this term is used to describe an airborne laser profiling system that produces location and
A Method to Create a Single Photon LiDAR based Hydro-flattened DEM
 A Method to Create a Single Photon LiDAR based Hydro-flattened DEM Sagar Deshpande 1 and Alper Yilmaz 2 1 Surveying Engineering, Ferris State University 2 Department of Civil, Environmental, and Geodetic
A Method to Create a Single Photon LiDAR based Hydro-flattened DEM Sagar Deshpande 1 and Alper Yilmaz 2 1 Surveying Engineering, Ferris State University 2 Department of Civil, Environmental, and Geodetic
SYNERGY BETWEEN AERIAL IMAGERY AND LOW DENSITY POINT CLOUD FOR AUTOMATED IMAGE CLASSIFICATION AND POINT CLOUD DENSIFICATION
 SYNERGY BETWEEN AERIAL IMAGERY AND LOW DENSITY POINT CLOUD FOR AUTOMATED IMAGE CLASSIFICATION AND POINT CLOUD DENSIFICATION Hani Mohammed Badawy a,*, Adel Moussa a,b, Naser El-Sheimy a a Dept. of Geomatics
SYNERGY BETWEEN AERIAL IMAGERY AND LOW DENSITY POINT CLOUD FOR AUTOMATED IMAGE CLASSIFICATION AND POINT CLOUD DENSIFICATION Hani Mohammed Badawy a,*, Adel Moussa a,b, Naser El-Sheimy a a Dept. of Geomatics
ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning
 1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
1 ENY-C2005 Geoinformation in Environmental Modeling Lecture 4b: Laser scanning Petri Rönnholm Aalto University 2 Learning objectives To recognize applications of laser scanning To understand principles
Research on-board LIDAR point cloud data pretreatment
 Acta Technica 62, No. 3B/2017, 1 16 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on-board LIDAR point cloud data pretreatment Peng Cang 1, Zhenglin Yu 1, Bo Yu 2, 3 Abstract. In view of the
Acta Technica 62, No. 3B/2017, 1 16 c 2017 Institute of Thermomechanics CAS, v.v.i. Research on-board LIDAR point cloud data pretreatment Peng Cang 1, Zhenglin Yu 1, Bo Yu 2, 3 Abstract. In view of the
LASERDATA LIS build your own bundle! LIS Pro 3D LIS 3.0 NEW! BETA AVAILABLE! LIS Road Modeller. LIS Orientation. LIS Geology.
 LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
LIS 3.0...build your own bundle! NEW! LIS Geology LIS Terrain Analysis LIS Forestry LIS Orientation BETA AVAILABLE! LIS Road Modeller LIS Editor LIS City Modeller colors visualization I / O tools arithmetic
An Introduction to Lidar & Forestry May 2013
 An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
An Introduction to Lidar & Forestry May 2013 Introduction to Lidar & Forestry Lidar technology Derivatives from point clouds Applied to forestry Publish & Share Futures Lidar Light Detection And Ranging
EVOLUTION OF POINT CLOUD
 Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Figure 1: Left and right images of a stereo pair and the disparity map (right) showing the differences of each pixel in the right and left image. (source: https://stackoverflow.com/questions/17607312/difference-between-disparity-map-and-disparity-image-in-stereo-matching)
Chapters 1 9: Overview
 Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
Chapters 1 9: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 9: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapters
COMPARISON OF TREE EXTRACTION FROM INTENSITY DROP AND FROM MULTIPLE RETURNS IN ALS DATA
 COMPARISON OF TREE EXTRACTION FROM INTENSITY DROP AND FROM MULTIPLE RETURNS IN ALS DATA C.Örmeci a, S.Cesur b a ITU, Civil Engineering Faculty, 80626 Maslak Istanbul, Turkey ormeci@itu.edu.tr b ITU, Informatics
COMPARISON OF TREE EXTRACTION FROM INTENSITY DROP AND FROM MULTIPLE RETURNS IN ALS DATA C.Örmeci a, S.Cesur b a ITU, Civil Engineering Faculty, 80626 Maslak Istanbul, Turkey ormeci@itu.edu.tr b ITU, Informatics
Remote sensing techniques applied to seismic vulnerability assessment
 Remote sensing techniques applied to seismic vulnerability assessment JJ Arranz (josejuan.arranz@upm.es), Y. Torres (y.torres@upm.es), A. Haghi (a.haghi@alumnus.upm.es), J. Gaspar (jorge.gaspar@upm.es)
Remote sensing techniques applied to seismic vulnerability assessment JJ Arranz (josejuan.arranz@upm.es), Y. Torres (y.torres@upm.es), A. Haghi (a.haghi@alumnus.upm.es), J. Gaspar (jorge.gaspar@upm.es)
AUTOMATIC INTERPRETATION OF HIGH RESOLUTION SAR IMAGES: FIRST RESULTS OF SAR IMAGE SIMULATION FOR SINGLE BUILDINGS
 AUTOMATIC INTERPRETATION OF HIGH RESOLUTION SAR IMAGES: FIRST RESULTS OF SAR IMAGE SIMULATION FOR SINGLE BUILDINGS J. Tao *, G. Palubinskas, P. Reinartz German Aerospace Center DLR, 82234 Oberpfaffenhofen,
AUTOMATIC INTERPRETATION OF HIGH RESOLUTION SAR IMAGES: FIRST RESULTS OF SAR IMAGE SIMULATION FOR SINGLE BUILDINGS J. Tao *, G. Palubinskas, P. Reinartz German Aerospace Center DLR, 82234 Oberpfaffenhofen,
Light Detection and Ranging (LiDAR)
") Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Light Detection and Ranging (LiDAR) http://code.google.com/creative/radiohead/ Types of aerial sensors passive active 1 Active sensors for mapping terrain Radar transmits microwaves in pulses determines
Development of Geospatial Smart Cities and Management
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Development of Geospatial Smart Cities and Management (E. Yılmaz, F. Kartal, E. Uçar, K. Eren) FIG2018 - Istanbul, 8 th May 2018 1
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Development of Geospatial Smart Cities and Management (E. Yılmaz, F. Kartal, E. Uçar, K. Eren) FIG2018 - Istanbul, 8 th May 2018 1
Aalborg Universitet. Published in: Accuracy Publication date: Document Version Early version, also known as pre-print
 Aalborg Universitet A method for checking the planimetric accuracy of Digital Elevation Models derived by Airborne Laser Scanning Høhle, Joachim; Øster Pedersen, Christian Published in: Accuracy 2010 Publication
Aalborg Universitet A method for checking the planimetric accuracy of Digital Elevation Models derived by Airborne Laser Scanning Høhle, Joachim; Øster Pedersen, Christian Published in: Accuracy 2010 Publication
Tree height measurements and tree growth estimation in a mire environment using digital surface models
 Tree height measurements and tree growth estimation in a mire environment using digital surface models E. Baltsavias 1, A. Gruen 1, M. Küchler 2, P.Thee 2, L.T. Waser 2, L. Zhang 1 1 Institute of Geodesy
Tree height measurements and tree growth estimation in a mire environment using digital surface models E. Baltsavias 1, A. Gruen 1, M. Küchler 2, P.Thee 2, L.T. Waser 2, L. Zhang 1 1 Institute of Geodesy
L7 Raster Algorithms
 L7 Raster Algorithms NGEN6(TEK23) Algorithms in Geographical Information Systems by: Abdulghani Hasan, updated Nov 216 by Per-Ola Olsson Background Store and analyze the geographic information: Raster
L7 Raster Algorithms NGEN6(TEK23) Algorithms in Geographical Information Systems by: Abdulghani Hasan, updated Nov 216 by Per-Ola Olsson Background Store and analyze the geographic information: Raster
Municipal Projects in Cambridge Using a LiDAR Dataset. NEURISA Day 2012 Sturbridge, MA
 Municipal Projects in Cambridge Using a LiDAR Dataset NEURISA Day 2012 Sturbridge, MA October 15, 2012 Jeff Amero, GIS Manager, City of Cambridge Presentation Overview Background on the LiDAR dataset Solar
Municipal Projects in Cambridge Using a LiDAR Dataset NEURISA Day 2012 Sturbridge, MA October 15, 2012 Jeff Amero, GIS Manager, City of Cambridge Presentation Overview Background on the LiDAR dataset Solar
Training i Course Remote Sensing Basic Theory & Image Processing Methods September 2011
 Training i Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Geometric Operations Michiel Damen (September 2011) damen@itc.nl ITC FACULTY OF GEO-INFORMATION SCIENCE AND
Training i Course Remote Sensing Basic Theory & Image Processing Methods 19 23 September 2011 Geometric Operations Michiel Damen (September 2011) damen@itc.nl ITC FACULTY OF GEO-INFORMATION SCIENCE AND
Multi-ray photogrammetry: A rich dataset for the extraction of roof geometry for 3D reconstruction
 Multi-ray photogrammetry: A rich dataset for the extraction of roof geometry for 3D reconstruction Andrew McClune, Pauline Miller, Jon Mills Newcastle University David Holland Ordnance Survey Background
Multi-ray photogrammetry: A rich dataset for the extraction of roof geometry for 3D reconstruction Andrew McClune, Pauline Miller, Jon Mills Newcastle University David Holland Ordnance Survey Background
GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES
 GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES Norbert Haala, Martin Kada, Susanne Becker, Jan Böhm, Yahya Alshawabkeh University of Stuttgart, Institute for Photogrammetry, Germany Forename.Lastname@ifp.uni-stuttgart.de
GRAPHICS TOOLS FOR THE GENERATION OF LARGE SCALE URBAN SCENES Norbert Haala, Martin Kada, Susanne Becker, Jan Böhm, Yahya Alshawabkeh University of Stuttgart, Institute for Photogrammetry, Germany Forename.Lastname@ifp.uni-stuttgart.de
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems
 Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
Quality Assurance and Quality Control Procedures for Survey-Grade Mobile Mapping Systems Latin America Geospatial Forum November, 2015 Agenda 1. Who is Teledyne Optech 2. The Lynx Mobile Mapper 3. Mobile
FILTERING OF DIGITAL ELEVATION MODELS
 FILTERING OF DIGITAL ELEVATION MODELS Dr. Ing. Karsten Jacobsen Institute for Photogrammetry and Engineering Survey University of Hannover, Germany e-mail: jacobsen@ipi.uni-hannover.de Dr. Ing. Ricardo
FILTERING OF DIGITAL ELEVATION MODELS Dr. Ing. Karsten Jacobsen Institute for Photogrammetry and Engineering Survey University of Hannover, Germany e-mail: jacobsen@ipi.uni-hannover.de Dr. Ing. Ricardo
MODELLING FOREST CANOPY USING AIRBORNE LIDAR DATA
 MODELLING FOREST CANOPY USING AIRBORNE LIDAR DATA Jihn-Fa JAN (Taiwan) Associate Professor, Department of Land Economics National Chengchi University 64, Sec. 2, Chih-Nan Road, Taipei 116, Taiwan Telephone:
MODELLING FOREST CANOPY USING AIRBORNE LIDAR DATA Jihn-Fa JAN (Taiwan) Associate Professor, Department of Land Economics National Chengchi University 64, Sec. 2, Chih-Nan Road, Taipei 116, Taiwan Telephone:
CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION INTRODUCTION
 CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION Yaron Katzil 1, Yerach Doytsher 2 Mapping and Geo-Information Engineering Faculty of Civil and Environmental Engineering Technion - Israel Institute
CONSISTENT COLOR RESAMPLE IN DIGITAL ORTHOPHOTO PRODUCTION Yaron Katzil 1, Yerach Doytsher 2 Mapping and Geo-Information Engineering Faculty of Civil and Environmental Engineering Technion - Israel Institute
COMBINATION OF IMAGE AND LIDAR DATA FOR BUILDING AND TREE EXTRACTION
 COMBINATION OF IMAGE AND LIDAR DATA FOR BUILDING AND TREE EXTRACTION Demir, N. 1, Baltsavias, E. 1 1- (demir,manos@geod.baug.ethz.ch) Institute of Geodesy and Photogrammetry, ETH Zurich, CH-8093, Zurich,
COMBINATION OF IMAGE AND LIDAR DATA FOR BUILDING AND TREE EXTRACTION Demir, N. 1, Baltsavias, E. 1 1- (demir,manos@geod.baug.ethz.ch) Institute of Geodesy and Photogrammetry, ETH Zurich, CH-8093, Zurich,
An Improved Top-Hat Filter with Sloped Brim for Extracting Ground Points from Airborne Lidar Point Clouds
 Remote Sens. 2014, 6, 12885-12908; doi:10.3390/rs61212885 Article OPEN ACCESS remote sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing An Improved Top-Hat Filter with Sloped Brim for Extracting
Remote Sens. 2014, 6, 12885-12908; doi:10.3390/rs61212885 Article OPEN ACCESS remote sensing ISSN 2072-4292 www.mdpi.com/journal/remotesensing An Improved Top-Hat Filter with Sloped Brim for Extracting
True orthophoto generation. Morten Ødegaard Nielsen. Kgs. Lyngby 2004 IMM-THESIS
 True orthophoto generation Morten Ødegaard Nielsen Kgs. Lyngby 2004 IMM-THESIS-2004-50 True orthophoto generation Morten Ødegaard Nielsen Kgs. Lyngby 2004 Technical University of Denmark Informatics and
True orthophoto generation Morten Ødegaard Nielsen Kgs. Lyngby 2004 IMM-THESIS-2004-50 True orthophoto generation Morten Ødegaard Nielsen Kgs. Lyngby 2004 Technical University of Denmark Informatics and
SimActive and PhaseOne Workflow case study. By François Riendeau and Dr. Yuri Raizman Revision 1.0
 SimActive and PhaseOne Workflow case study By François Riendeau and Dr. Yuri Raizman Revision 1.0 Contents 1. Introduction... 2 1.1. Simactive... 2 1.2. PhaseOne Industrial... 2 2. Testing Procedure...
SimActive and PhaseOne Workflow case study By François Riendeau and Dr. Yuri Raizman Revision 1.0 Contents 1. Introduction... 2 1.1. Simactive... 2 1.2. PhaseOne Industrial... 2 2. Testing Procedure...
Hamilton County Enhances GIS Base Mapping with 1-foot Contours
 Hamilton County Enhances GIS Base Mapping with 1-foot Contours Presented by Larry Stout, Hamilton County GIS Manager Brad Fugate, Woolpert Inc. Today s Presentation Hamilton County s 2004 Base Mapping
Hamilton County Enhances GIS Base Mapping with 1-foot Contours Presented by Larry Stout, Hamilton County GIS Manager Brad Fugate, Woolpert Inc. Today s Presentation Hamilton County s 2004 Base Mapping
Filtering Airborne Laser Scanning Data with Morphological Methods
 Filtering Airborne Laser Scanning Data with Morphological Methods Qi Chen, Peng Gong, Dennis Baldocchi, and Gengxin Xie Abstract Filtering methods based on morphological operations have been developed
Filtering Airborne Laser Scanning Data with Morphological Methods Qi Chen, Peng Gong, Dennis Baldocchi, and Gengxin Xie Abstract Filtering methods based on morphological operations have been developed
COMBINING HIGH SPATIAL RESOLUTION OPTICAL AND LIDAR DATA FOR OBJECT-BASED IMAGE CLASSIFICATION
 COMBINING HIGH SPATIAL RESOLUTION OPTICAL AND LIDAR DATA FOR OBJECT-BASED IMAGE CLASSIFICATION Ruonan Li 1, Tianyi Zhang 1, Ruozheng Geng 1, Leiguang Wang 2, * 1 School of Forestry, Southwest Forestry
COMBINING HIGH SPATIAL RESOLUTION OPTICAL AND LIDAR DATA FOR OBJECT-BASED IMAGE CLASSIFICATION Ruonan Li 1, Tianyi Zhang 1, Ruozheng Geng 1, Leiguang Wang 2, * 1 School of Forestry, Southwest Forestry
ADAPTIVE FILTERING OF AERIAL LASER SCANNING DATA
 ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, September 12-14, 2007, Finland ADAPTIVE FILTERING OF AERIAL LASER SCANNING DATA Gianfranco Forlani a, Carla Nardinocchi b1 a Dept. of Civil
ISPRS Workshop on Laser Scanning 2007 and SilviLaser 2007, Espoo, September 12-14, 2007, Finland ADAPTIVE FILTERING OF AERIAL LASER SCANNING DATA Gianfranco Forlani a, Carla Nardinocchi b1 a Dept. of Civil
COMBINING HIGH RESOLUTION SATELLITE IMAGERY AND AIRBORNE LASER SCANNING DATA FOR GENERATING BARELAND DEM IN URBAN AREAS
 COMBINING HIGH RESOLUTION SATELLITE IMAGERY AND AIRBORNE LASER SCANNING DATA FOR GENERATING BARELAND IN URBAN AREAS Guo Tao *, Yoshifumi Yasuoka Institute of Industrial Science, University of Tokyo, 4-6-1
COMBINING HIGH RESOLUTION SATELLITE IMAGERY AND AIRBORNE LASER SCANNING DATA FOR GENERATING BARELAND IN URBAN AREAS Guo Tao *, Yoshifumi Yasuoka Institute of Industrial Science, University of Tokyo, 4-6-1
TRIMBLE BUSINESS CENTER PHOTOGRAMMETRY MODULE
 TRIMBLE BUSINESS CENTER PHOTOGRAMMETRY MODULE WHITE PAPER TRIMBLE GEOSPATIAL DIVISION WESTMINSTER, COLORADO, USA July 2013 ABSTRACT The newly released Trimble Business Center Photogrammetry Module is compatible
TRIMBLE BUSINESS CENTER PHOTOGRAMMETRY MODULE WHITE PAPER TRIMBLE GEOSPATIAL DIVISION WESTMINSTER, COLORADO, USA July 2013 ABSTRACT The newly released Trimble Business Center Photogrammetry Module is compatible
City-Modeling. Detecting and Reconstructing Buildings from Aerial Images and LIDAR Data
 City-Modeling Detecting and Reconstructing Buildings from Aerial Images and LIDAR Data Department of Photogrammetrie Institute for Geodesy and Geoinformation Bonn 300000 inhabitants At river Rhine University
City-Modeling Detecting and Reconstructing Buildings from Aerial Images and LIDAR Data Department of Photogrammetrie Institute for Geodesy and Geoinformation Bonn 300000 inhabitants At river Rhine University
AUTOMATIC EXTRACTION OF ROAD MARKINGS FROM MOBILE LASER SCANNING DATA
 AUTOMATIC EXTRACTION OF ROAD MARKINGS FROM MOBILE LASER SCANNING DATA Hao Ma a,b, Zhihui Pei c, Zhanying Wei a,b,*, Ruofei Zhong a a Beijing Advanced Innovation Center for Imaging Technology, Capital Normal
AUTOMATIC EXTRACTION OF ROAD MARKINGS FROM MOBILE LASER SCANNING DATA Hao Ma a,b, Zhihui Pei c, Zhanying Wei a,b,*, Ruofei Zhong a a Beijing Advanced Innovation Center for Imaging Technology, Capital Normal
DETERMINATION OF CORRESPONDING TRUNKS IN A PAIR OF TERRESTRIAL IMAGES AND AIRBORNE LASER SCANNER DATA
 The Photogrammetric Journal of Finland, 20 (1), 2006 Received 31.7.2006, Accepted 13.11.2006 DETERMINATION OF CORRESPONDING TRUNKS IN A PAIR OF TERRESTRIAL IMAGES AND AIRBORNE LASER SCANNER DATA Olli Jokinen,
The Photogrammetric Journal of Finland, 20 (1), 2006 Received 31.7.2006, Accepted 13.11.2006 DETERMINATION OF CORRESPONDING TRUNKS IN A PAIR OF TERRESTRIAL IMAGES AND AIRBORNE LASER SCANNER DATA Olli Jokinen,
Chapters 1 7: Overview
 Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
Chapters 1 7: Overview Chapter 1: Introduction Chapters 2 4: Data acquisition Chapters 5 7: Data manipulation Chapter 5: Vertical imagery Chapter 6: Image coordinate measurements and refinements Chapter
ROOF PLANE SEGMENTATION BY COMBINING MULTIPLE IMAGES AND POINT CLOUDS
 ROOF PLANE SEGMENTATION BY COMBINING MULTIPLE IMAGES AND POINT CLOUDS Franz Rottensteiner Institute of Photogrammetry and GeoInformation, Leibniz University Hannover, Nienburger Strasse 1, 30167 Hannover,
ROOF PLANE SEGMENTATION BY COMBINING MULTIPLE IMAGES AND POINT CLOUDS Franz Rottensteiner Institute of Photogrammetry and GeoInformation, Leibniz University Hannover, Nienburger Strasse 1, 30167 Hannover,
Filtering Airborne Lidar Data by Modified White Top-Hat Transform with Directional Edge Constraints
 Filtering Airborne Lidar Data by Modified White Top-Hat Transform with Directional Edge Constraints Yong Li, Bin Yong, Huayi Wu, Ru An, Hanwei Xu, Jia Xu, and Qisheng He Abstract A novel algorithm that
Filtering Airborne Lidar Data by Modified White Top-Hat Transform with Directional Edge Constraints Yong Li, Bin Yong, Huayi Wu, Ru An, Hanwei Xu, Jia Xu, and Qisheng He Abstract A novel algorithm that
MONO-IMAGE INTERSECTION FOR ORTHOIMAGE REVISION
 MONO-IMAGE INTERSECTION FOR ORTHOIMAGE REVISION Mohamed Ibrahim Zahran Associate Professor of Surveying and Photogrammetry Faculty of Engineering at Shoubra, Benha University ABSTRACT This research addresses
MONO-IMAGE INTERSECTION FOR ORTHOIMAGE REVISION Mohamed Ibrahim Zahran Associate Professor of Surveying and Photogrammetry Faculty of Engineering at Shoubra, Benha University ABSTRACT This research addresses
N.J.P.L.S. An Introduction to LiDAR Concepts and Applications
 N.J.P.L.S. An Introduction to LiDAR Concepts and Applications Presentation Outline LIDAR Data Capture Advantages of Lidar Technology Basics Intensity and Multiple Returns Lidar Accuracy Airborne Laser
N.J.P.L.S. An Introduction to LiDAR Concepts and Applications Presentation Outline LIDAR Data Capture Advantages of Lidar Technology Basics Intensity and Multiple Returns Lidar Accuracy Airborne Laser
AN ADAPTIVE APPROACH FOR SEGMENTATION OF 3D LASER POINT CLOUD
 AN ADAPTIVE APPROACH FOR SEGMENTATION OF 3D LASER POINT CLOUD Z. Lari, A. F. Habib, E. Kwak Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada TN 1N4 - (zlari, ahabib,
AN ADAPTIVE APPROACH FOR SEGMENTATION OF 3D LASER POINT CLOUD Z. Lari, A. F. Habib, E. Kwak Department of Geomatics Engineering, University of Calgary, Calgary, Alberta, Canada TN 1N4 - (zlari, ahabib,
KEY WORDS: IKONOS, Orthophotos, Relief Displacement, Affine Transformation
 GRATIO OF DIGITAL ORTHOPHOTOS FROM IKOOS GO IMAGS Liang-Chien Chen and Chiu-Yueh Lo Center for Space and Remote Sensing Research. ational Central University Tel: 886-3-47151 xt.76 Fax: 886-3-455535 lcchen@csrsr.ncu.edu.tw
GRATIO OF DIGITAL ORTHOPHOTOS FROM IKOOS GO IMAGS Liang-Chien Chen and Chiu-Yueh Lo Center for Space and Remote Sensing Research. ational Central University Tel: 886-3-47151 xt.76 Fax: 886-3-455535 lcchen@csrsr.ncu.edu.tw
A Generalized Adaptive Mathematical Morphological Filter for LIDAR Data
 Florida International University FIU Digital Commons FIU Electronic Theses and Dissertations University Graduate School 11-14-2013 A Generalized Adaptive Mathematical Morphological Filter for LIDAR Data
Florida International University FIU Digital Commons FIU Electronic Theses and Dissertations University Graduate School 11-14-2013 A Generalized Adaptive Mathematical Morphological Filter for LIDAR Data
BUILDING BOUNDARY EXTRACTION FROM HIGH RESOLUTION IMAGERY AND LIDAR DATA
 BUILDING BOUNDARY EXTRACTION FROM HIGH RESOLUTION IMAGERY AND LIDAR DATA Liang Cheng, Jianya Gong, Xiaoling Chen, Peng Han State Key Laboratory of Information Engineering in Surveying, Mapping and Remote
BUILDING BOUNDARY EXTRACTION FROM HIGH RESOLUTION IMAGERY AND LIDAR DATA Liang Cheng, Jianya Gong, Xiaoling Chen, Peng Han State Key Laboratory of Information Engineering in Surveying, Mapping and Remote
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS
 A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
BRIEF EXAMPLES OF PRACTICAL USES OF LIDAR
 BRIEF EXAMPLES OF PRACTICAL USES OF LIDAR PURDUE ROAD SCHOOL - 3/9/2016 CHRIS MORSE USDA-NRCS, STATE GIS COORDINATOR LIDAR/DEM SOURCE DATES LiDAR and its derivatives (DEMs) have a collection date for data
BRIEF EXAMPLES OF PRACTICAL USES OF LIDAR PURDUE ROAD SCHOOL - 3/9/2016 CHRIS MORSE USDA-NRCS, STATE GIS COORDINATOR LIDAR/DEM SOURCE DATES LiDAR and its derivatives (DEMs) have a collection date for data
Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene
 Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene Buyuksalih, G.*, Oruc, M.*, Topan, H.*,.*, Jacobsen, K.** * Karaelmas University Zonguldak, Turkey **University
Geometric Accuracy Evaluation, DEM Generation and Validation for SPOT-5 Level 1B Stereo Scene Buyuksalih, G.*, Oruc, M.*, Topan, H.*,.*, Jacobsen, K.** * Karaelmas University Zonguldak, Turkey **University
TERRESTRIAL LASER SCANNER DATA PROCESSING
 TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
TERRESTRIAL LASER SCANNER DATA PROCESSING L. Bornaz (*), F. Rinaudo (*) (*) Politecnico di Torino - Dipartimento di Georisorse e Territorio C.so Duca degli Abruzzi, 24 10129 Torino Tel. +39.011.564.7687
Lecture 4: Digital Elevation Models
 Lecture 4: Digital Elevation Models GEOG413/613 Dr. Anthony Jjumba 1 Digital Terrain Modeling Terms: DEM, DTM, DTEM, DSM, DHM not synonyms. The concepts they illustrate are different Digital Terrain Modeling
Lecture 4: Digital Elevation Models GEOG413/613 Dr. Anthony Jjumba 1 Digital Terrain Modeling Terms: DEM, DTM, DTEM, DSM, DHM not synonyms. The concepts they illustrate are different Digital Terrain Modeling
Trimble Geospatial Division Integrated Solutions for Geomatics professions. Volker Zirn Regional Sales Representative
 Trimble Geospatial Division Integrated Solutions for Geomatics professions Volker Zirn Regional Sales Representative 1 Agenda Trimble GeoSpatial Division Airborne System Solutions Trimble Inpho Software
Trimble Geospatial Division Integrated Solutions for Geomatics professions Volker Zirn Regional Sales Representative 1 Agenda Trimble GeoSpatial Division Airborne System Solutions Trimble Inpho Software
Low-Cost Orthophoto Production Using OrthoMapper Software
 Low-Cost Orthophoto Production Using OrthoMapper Software Rick Day Penn State Cooperative Extension, Geospatial Technology Program, RGIS-Chesapeake Air Photos Historical air photos are available from a
Low-Cost Orthophoto Production Using OrthoMapper Software Rick Day Penn State Cooperative Extension, Geospatial Technology Program, RGIS-Chesapeake Air Photos Historical air photos are available from a
LiDAR & Orthophoto Data Report
 LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
LiDAR & Orthophoto Data Report Tofino Flood Plain Mapping Data collected and prepared for: District of Tofino, BC 121 3 rd Street Tofino, BC V0R 2Z0 Eagle Mapping Ltd. #201 2071 Kingsway Ave Port Coquitlam,
Surface Creation & Analysis with 3D Analyst
 Esri International User Conference July 23 27 San Diego Convention Center Surface Creation & Analysis with 3D Analyst Khalid Duri Surface Basics Defining the surface Representation of any continuous measurement
Esri International User Conference July 23 27 San Diego Convention Center Surface Creation & Analysis with 3D Analyst Khalid Duri Surface Basics Defining the surface Representation of any continuous measurement
Vegetation height maps derived from digital elevation models the next innovation in the production of orienteering maps?
 Vegetation height maps derived from digital elevation models the next innovation in the production of orienteering maps? Development of Orienteering Maps. 1. Revolution 20 years ago: Digital Cartography
Vegetation height maps derived from digital elevation models the next innovation in the production of orienteering maps? Development of Orienteering Maps. 1. Revolution 20 years ago: Digital Cartography
APPENDIX E2. Vernal Pool Watershed Mapping
 APPENDIX E2 Vernal Pool Watershed Mapping MEMORANDUM To: U.S. Fish and Wildlife Service From: Tyler Friesen, Dudek Subject: SSHCP Vernal Pool Watershed Analysis Using LIDAR Data Date: February 6, 2014
APPENDIX E2 Vernal Pool Watershed Mapping MEMORANDUM To: U.S. Fish and Wildlife Service From: Tyler Friesen, Dudek Subject: SSHCP Vernal Pool Watershed Analysis Using LIDAR Data Date: February 6, 2014
Chapter 1: Overview. Photogrammetry: Introduction & Applications Photogrammetric tools:
 Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Chapter 1: Overview Photogrammetry: Introduction & Applications Photogrammetric tools: Rotation matrices Photogrammetric point positioning Photogrammetric bundle adjustment This chapter will cover the
Advanced point cloud processing
 Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted
Advanced point cloud processing George Vosselman ITC Enschede, the Netherlands INTERNATIONAL INSTITUTE FOR GEO-INFORMATION SCIENCE AND EARTH OBSERVATION Laser scanning platforms Airborne systems mounted