Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation
|
|
|
- Solomon Malone
- 5 years ago
- Views:
Transcription

1 Non Linear Control of Four Wheel Omnidirectional Mobile Robot: Modeling, Simulation and Real-Time Implementation eer Alakshendra Research Scholar Robotics Lab Dr Shital S.Chiddarwar Supervisor Robotics Lab Department of Mechanical Engineering India-44000
2 Contents Introduction Objective How Matlab/Simulink helped us? Mathematical Modelling Controller Design Optimization Simulation Results Real Time Implementation (RTI) Conclusions Summary
3 Wheeled mobile robots Non holonomic : Controllable D.O.F < Total D.OF Direction of motion is restricted Holonomic : Controllable D.O.F = Total D.OF Direction of motion is not restricted. The robot can move in any direction. 3

4 Four wheel omnidirectional mobile robot (FWOMR) Omni-directional wheel platform is a holonomic system having 3 DOF in horizontal plane. Mecanum Wheel Direction of motion Motor 4





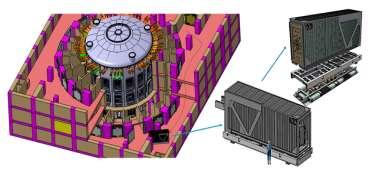
5 Applications of FWOMR Omni-directional wheel chair Omni fork lifter Warehouse Omni move lifter Omni robot Tokomak building 5
6 Objective Development of mathematical model of Mecanum wheeled mobile robot. Solution of highly non linear equations in less computational time. Development of a simulation environment. Development of robust controller for trajectory tracking of mobile robot in presence of matched and unmatched uncertainties. Real time implementation of proposed approach for trajectory tracking. 6
7 Work Flow Modeling Controller Design Optimization Real-Time Testing 7


8 Challenges faced Solving second order non linear differential equation. Estimating control design parameters. Building a simulation environment. Feedback data collection. Real time implementation on hardware. Solution Simulink Simulink Design Optimization Simscape Multibody Kinect Support package Arduino Support Package Robotics System Toolbox 8


9 Modeling Tool Used Simscape Multibody Simulink Simulink Design Optimization Robotics System Toolbox Arduino Support Package Kinect Support package 9
10 Kinematic Equation z x r x w b v. / z y r MW y w a v. / z y r MW y w a v. / z x r x w b v. 3 / 3 z x r x w b v. / 4 4 z x r x w b v. / z y r MW y w a v. / z y r MW y w a v. / ) /( ) /( ) /( ) /( 4 b a b a b a b a R w v v z y x cos( ) sin( ) 0 ( ) sin( ) cos( ) R ( ) T T q q q r r z P x y R x y q y q x r x r y 0
11 Dynamic equation x( t) f ( x) g( x) u( t) ( t, u( t)) Symbolic math toolbox



12 Solution of dynamic equation Equation of motion can be solved by either solving the derived equation using Simulink or by using Simscape Multibody. In Simscape Multibody, CAD file of the robot is imported to Matlab in the form of masses, inertias, sensors, joints etc. It also provides a 3D environment to visualize the system dynamics. To check the system dynamics, input voltage can be kept variable and it can be manually changed using Slider block available in the Dashboard library. Alternatively, Signal builder block can be used to build the input signal. Simscape Multibody
 d 3 3 Bx( t) ) s( t) ) 3 3 u s( t) k sat( s( t) ) switching d 3 sw 3 k d k 0 0 d 0 k 0 d 0 0 k d 3 0 0 0 0 0 0 3 k k sw p k 0 0 p 0 k 0 p 0 0 k p3 k 0 0 sw 0 k 0 sw 0 0 k sw3 k 0 0 i k 0 k 0 i i 0")
13 Second order sliding mode control error as t 0 s( t) k e( t) k e( t) k e( t) s( t) p d i st ( ) 0 u u u total equivalent switching u ( k B ) ( k e( t) k e( t) equivalent d 34 i 3 p 3 k ( x ( t) Ax( t) d 3 3 Bx( t) ) s( t) ) 3 3 u s( t) k sat( s( t) ) switching d 3 sw 3 k d k 0 0 d 0 k 0 d 0 0 k d k k sw p k 0 0 p 0 k 0 p 0 0 k p3 k 0 0 sw 0 k 0 sw 0 0 k sw3 k 0 0 i k 0 k 0 i i 0 0 k i Lyapunov stability criterion is satisfied 0 3

14 Second order sliding mode control in simulink Dynamics Input/output and uncertainties Controller 4

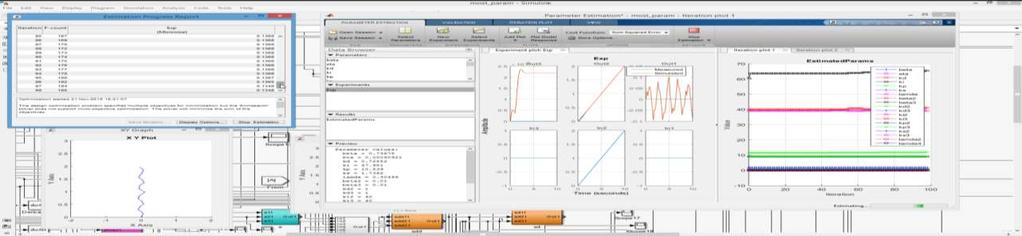



15 Simulink Design Optimization has been used to estimate the controller design parameters 5

16 Simulation results for complicated trajectory 6



17 Open loop testing 7

18 Close loop testing (Robotics System Toolbox) Node Node Kinect Matlab/Simulink program ROS Node IMU Matlab/Simulink program Simulink ROS OR Kinect ROS package IMU ROS package ROS Node 8
 Subscriber Controller")
19 Close loop testing (Robotics System Toolbox) Subscriber Controller Publisher 9


20 Results for eight type trajectory 0
21 Conclusions Solution of non linear dynamic equation including orientation of mobile robot. Successful tracking of desired trajectory in presence of matched and unmatched uncertainties. Smooth and chattering free control input. Successful real time implementation.


22 Summary of the work and advantages of using Matlab Summary Advantages of using Matlab Control Law Dynamic Equation Kinematic Equation Open loop test using Arduino MEGA ADK Estimation of control design parameters Closed loop test using camera and IMU. Model based design Implementation of control strategy Ability to solve non linear equations Parameter estimation Real time implementation Better understanding of kinematic and dynamic model Implementation of control strategy Ability to perform number of simulation experiments
23 THANK YOU Q & A? 3
10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T
![10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T](/thumbs/79/79288754.jpg "10/11/07 1. Motion Control (wheeled robots) Representing Robot Position ( ) ( ) [ ] T") 3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
3 3 Motion Control (wheeled robots) Introduction: Mobile Robot Kinematics Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground
System modeling using Simulink and Simscape
 System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
System modeling using Simulink and Simscape Abhisek Roy Sruthi Geetha Veer Alakshendra 2015 The MathWorks, Inc. 1 Multi-domain Systems 2 Common challenges 1. Multi-domain simulation 2. Capturing the system
CMPUT 412 Motion Control Wheeled robots. Csaba Szepesvári University of Alberta
 CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
CMPUT 412 Motion Control Wheeled robots Csaba Szepesvári University of Alberta 1 Motion Control (wheeled robots) Requirements Kinematic/dynamic model of the robot Model of the interaction between the wheel
Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique
 Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Noor Asyikin binti
Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Solving Tracking Problem of a Nonholonomic Wheel Mobile Robot Using Backstepping Technique Noor Asyikin binti
Motion Control (wheeled robots)
") Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Motion Control (wheeled robots) Requirements for Motion Control Kinematic / dynamic model of the robot Model of the interaction between the wheel and the ground Definition of required motion -> speed control,
Mechanical System and SimMechanics Simulation
 American Journal of Mechanical Engineering, 3, Vol., No. 7, 555 Available online at http://pubs.sciepub.com/ajme//7/ Science and Education Publishing DOI:.69/ajme--7 Mechanical System and SimMechanics
American Journal of Mechanical Engineering, 3, Vol., No. 7, 555 Available online at http://pubs.sciepub.com/ajme//7/ Science and Education Publishing DOI:.69/ajme--7 Mechanical System and SimMechanics
Mobile Robots Locomotion
 Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Mobile Robots Locomotion Institute for Software Technology 1 Course Outline 1. Introduction to Mobile Robots 2. Locomotion 3. Sensors 4. Localization 5. Environment Modelling 6. Reactive Navigation 2 Today
Integrating Mechanical Design and Multidomain Simulation with Simscape
 Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
Integrating Mechanical Design and Multidomain Simulation with Simscape Steve Miller Simscape Product Manager, MathWorks 2015 The MathWorks, Inc. 1 Integrating Mechanical Design and Multidomain Simulation
1. Introduction 1 2. Mathematical Representation of Robots
 1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
1. Introduction 1 1.1 Introduction 1 1.2 Brief History 1 1.3 Types of Robots 7 1.4 Technology of Robots 9 1.5 Basic Principles in Robotics 12 1.6 Notation 15 1.7 Symbolic Computation and Numerical Analysis
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated 2 Lab Simulation Project #1: Pan-Tilt (PT) structure (2dof) This system is composed by two
ROBOTICS 01PEEQW Laboratory Project #1. Basilio Bona DAUIN Politecnico di Torino
 ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
ROBOTICS 01PEEQW Laboratory Project #1 Basilio Bona DAUIN Politecnico di Torino The structure to be simulated This structure simulates a pan-tilt camera, pointing down to a plane. It is also possible to
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel
 Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Rapid Control Prototyping with MATLAB/Simulink Case Study: Ball-on-Wheel Vasco Lenzi Application Engineer MathWorks 2017 The MathWorks, Inc. 1 Introduction From Ticino, studied Mech Engineer at ETHZ Formula
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics
 Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
Dynamic Simulation of a KUKA KR5 Industrial Robot using MATLAB SimMechanics Arun Dayal Udai, C.G Rajeevlochana, Subir Kumar Saha Abstract The paper discusses a method for the dynamic simulation of a KUKA
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS
 A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
A NOUVELLE MOTION STATE-FEEDBACK CONTROL SCHEME FOR RIGID ROBOTIC MANIPULATORS Ahmad Manasra, 135037@ppu.edu.ps Department of Mechanical Engineering, Palestine Polytechnic University, Hebron, Palestine
Robotics System Toolbox
 Developing Robotics Applications with MATLAB, Simulink: Introducing the Robotics System Toolbox 2016 MathWorks, Inc. 1 What Are You Doing with Robotics? Build Robots 2 Using MATLAB and Simulink for Building
Developing Robotics Applications with MATLAB, Simulink: Introducing the Robotics System Toolbox 2016 MathWorks, Inc. 1 What Are You Doing with Robotics? Build Robots 2 Using MATLAB and Simulink for Building
EE565:Mobile Robotics Lecture 2
 EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
EE565:Mobile Robotics Lecture 2 Welcome Dr. Ing. Ahmad Kamal Nasir Organization Lab Course Lab grading policy (40%) Attendance = 10 % In-Lab tasks = 30 % Lab assignment + viva = 60 % Make a group Either
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape The MathWorks, Inc. 1
 Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Virtuelle Inbetriebnahme und Optimierung von Robotersystemen mit Simscape 2015 The MathWorks, Inc. 1 In this session Onshape and MATLAB enable engineers to combine CAD models with multidomain, dynamic
Integrating Mechanical Design and Multidomain Simulation with Simscape
 1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
1 Integrating Mechanical Design and Multidomain Simulation with Simscape 강효석과장 / Ph. D. Application Engineer MathWorks Korea 2017 The MathWorks, Inc. 2 In this session Onshape and MATLAB enable engineers
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών
 Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Υπολογιστικά πειράματα με το MATLAB Σύνδεση με Arduino & Raspberry Pi Ζαχαρίας Γκέτσης Μηχανικός Εφαρμογών 2012 The MathWorks, Inc. 1 Project-Based Learning Project-based learning is a comprehensive approach
Designing Robust Control by Sliding Mode Control Technique
 Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 2 (2013), pp. 137-144 Research India Publications http://www.ripublication.com/aeee.htm Designing Robust Control by Sliding
Advance in Electronic and Electric Engineering. ISSN 2231-1297, Volume 3, Number 2 (2013), pp. 137-144 Research India Publications http://www.ripublication.com/aeee.htm Designing Robust Control by Sliding
Written exams of Robotics 2
 Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Written exams of Robotics 2 http://www.diag.uniroma1.it/~deluca/rob2_en.html All materials are in English, unless indicated (oldies are in Year Date (mm.dd) Number of exercises Topics 2018 07.11 4 Inertia
Introduction to Autonomous Mobile Robots
 Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
Introduction to Autonomous Mobile Robots second edition Roland Siegwart, Illah R. Nourbakhsh, and Davide Scaramuzza The MIT Press Cambridge, Massachusetts London, England Contents Acknowledgments xiii
MCE/EEC 647/747: Robot Dynamics and Control. Lecture 1: Introduction
 MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
MCE/EEC 647/747: Robot Dynamics and Control Lecture 1: Introduction Reading: SHV Chapter 1 Robotics and Automation Handbook, Chapter 1 Assigned readings from several articles. Cleveland State University
Robot For Assistance. Master Project ME-GY 996. Presented By: Karim Chamaa. Presented To: Dr. Vikram Kapila
 Robot For Assistance Master Project ME-GY 996 Presented By: Karim Chamaa Presented To: Dr. Vikram Kapila Project Description Building a robot with an assistance duty. Goals: Build a cheap and independent
Robot For Assistance Master Project ME-GY 996 Presented By: Karim Chamaa Presented To: Dr. Vikram Kapila Project Description Building a robot with an assistance duty. Goals: Build a cheap and independent
Developing Algorithms for Robotics and Autonomous Systems
 Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Developing Algorithms for Robotics and Autonomous Systems Jorik Caljouw 2015 The MathWorks, Inc. 1 Key Takeaway of this Talk Success in developing an autonomous robotics system requires: 1. Multi-domain
Robotics (Kinematics) Winter 1393 Bonab University
 Winter 1393 Bonab University") Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Robotics () Winter 1393 Bonab University : most basic study of how mechanical systems behave Introduction Need to understand the mechanical behavior for: Design Control Both: Manipulators, Mobile Robots
Face Detection and Tracking Control with Omni Car
 Face Detection and Tracking Control with Omni Car Jheng-Hao Chen, Tung-Yu Wu CS 231A Final Report June 31, 2016 Abstract We present a combination of frontal and side face detection approach, using deep
Face Detection and Tracking Control with Omni Car Jheng-Hao Chen, Tung-Yu Wu CS 231A Final Report June 31, 2016 Abstract We present a combination of frontal and side face detection approach, using deep
AMR 2011/2012: Final Projects
 AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
AMR 2011/2012: Final Projects 0. General Information A final project includes: studying some literature (typically, 1-2 papers) on a specific subject performing some simulations or numerical tests on an
CHAPTER 3 MATHEMATICAL MODEL
 38 CHAPTER 3 MATHEMATICAL MODEL 3.1 KINEMATIC MODEL 3.1.1 Introduction The kinematic model of a mobile robot, represented by a set of equations, allows estimation of the robot s evolution on its trajectory,
38 CHAPTER 3 MATHEMATICAL MODEL 3.1 KINEMATIC MODEL 3.1.1 Introduction The kinematic model of a mobile robot, represented by a set of equations, allows estimation of the robot s evolution on its trajectory,
Mathematical Modelling Using SimScape (Mechanical Systems)
") Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Experiment Three Mathematical Modelling Using SimScape (Mechanical Systems) Control Systems Laboratory Dr. Zaer Abo Hammour Dr. Zaer Abo Hammour Control Systems Laboratory 1. Translational Mechanical System
Introduction to Physical Modelling Rory Adams Senior Application Engineer
 Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
Introduction to Physical Modelling Rory Adams Senior Application Engineer 2014 The MathWorks, Inc. 1 Creating Reusable Physical Models What you should walk away with Increased knowledge of: What is meant
NMT EE 589 & UNM ME 482/582 ROBOT ENGINEERING. Dr. Stephen Bruder NMT EE 589 & UNM ME 482/582
 ROBOT ENGINEERING Dr. Stephen Bruder Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am Email bruder@aptec.com
ROBOT ENGINEERING Dr. Stephen Bruder Course Information Robot Engineering Classroom UNM: Woodward Hall room 147 NMT: Cramer 123 Schedule Tue/Thur 8:00 9:15am Office Hours UNM: After class 10am Email bruder@aptec.com
MSMS (02PCYQW)
") MSMS (02PCYQW) 2016-2017 Organization: the course is composed of two parts: the first part is devoted to the Lagrange (LAG) approach the second part is devoted to the Bond-Graph (BG) approach Each part
MSMS (02PCYQW) 2016-2017 Organization: the course is composed of two parts: the first part is devoted to the Lagrange (LAG) approach the second part is devoted to the Bond-Graph (BG) approach Each part
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis
 Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Session #5 2D Mechanisms: Mobility, Kinematic Analysis & Synthesis Courtesy of Design Simulation Technologies, Inc. Used with permission. Dan Frey Today s Agenda Collect assignment #2 Begin mechanisms
Mobile Robot Kinematics
 Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Mobile Robot Kinematics Dr. Kurtuluş Erinç Akdoğan kurtuluserinc@cankaya.edu.tr INTRODUCTION Kinematics is the most basic study of how mechanical systems behave required to design to control Manipulator
Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria
 Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria Arttu Hautakoski, Mohammad M. Aref, and Jouni Mattila Laboratory of Automation and Hydraulic Engineering
Reconfigurable Manipulator Simulation for Robotics and Multimodal Machine Learning Application: Aaria Arttu Hautakoski, Mohammad M. Aref, and Jouni Mattila Laboratory of Automation and Hydraulic Engineering
Omni-Directional Drive and Mecanum: Team 1675 Style. Jon Anderson FRC Mentor
 Omni-Directional Drive and Mecanum: Team 1675 Style Jon Anderson jon.c.anderson@gmail.com FRC Mentor Omni-Directional Drive Omni-Directional Drive is Holonomic The controllable degrees of freedom is equal
Omni-Directional Drive and Mecanum: Team 1675 Style Jon Anderson jon.c.anderson@gmail.com FRC Mentor Omni-Directional Drive Omni-Directional Drive is Holonomic The controllable degrees of freedom is equal
Three Omni Directional Wheels Control On A Mobile Robot
 We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with three omni directional
We have made it easy for you to find a PDF Ebooks without any digging. And by having access to our ebooks online or by storing it on your computer, you have convenient answers with three omni directional
Dynamic Analysis of Manipulator Arm for 6-legged Robot
 American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
American Journal of Mechanical Engineering, 2013, Vol. 1, No. 7, 365-369 Available online at http://pubs.sciepub.com/ajme/1/7/42 Science and Education Publishing DOI:10.12691/ajme-1-7-42 Dynamic Analysis
Designing a Pick and Place Robotics Application Using MATLAB and Simulink
 Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
Designing a Pick and Place Robotics Application Using MATLAB and Simulink Carlos Santacruz-Rosero, PhD Sr Application Engineer Robotics Pulkit Kapur Sr Industry Marketing Manager Robotics 2017 The MathWorks,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR
 SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
SIMULATION ENVIRONMENT PROPOSAL, ANALYSIS AND CONTROL OF A STEWART PLATFORM MANIPULATOR Fabian Andres Lara Molina, Joao Mauricio Rosario, Oscar Fernando Aviles Sanchez UNICAMP (DPM-FEM), Campinas-SP, Brazil,
Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony
 Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony Department of Engineering, Australian National University, Australia. email: Robert.Mahony@anu.edu.au url: http://engnet.anu.edu.au/depeople/robert.mahony/
Bearing only visual servo control of a non-holonomic mobile robot. Robert Mahony Department of Engineering, Australian National University, Australia. email: Robert.Mahony@anu.edu.au url: http://engnet.anu.edu.au/depeople/robert.mahony/
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists. International authors and editors
 We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
We are IntechOpen, the world s leading publisher of Open Access books Built by scientists, for scientists 3,800 116,000 120M Open access books available International authors and editors Downloads Our
Dynamic Object Tracking Control for a Non-Holonomic Wheeled Autonomous Robot
 Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 339 350 (2009) 339 Dynamic Object Tracking Control for a Non-Holonomic Wheeled Autonomous Robot Yin-Tien Wang 1 *, Yu-Cheng Chen 1 and Ming-Chun
Tamkang Journal of Science and Engineering, Vol. 12, No. 3, pp. 339 350 (2009) 339 Dynamic Object Tracking Control for a Non-Holonomic Wheeled Autonomous Robot Yin-Tien Wang 1 *, Yu-Cheng Chen 1 and Ming-Chun
Using Modelica for Interactive Simulations of Technical Systems in a Virtual Reality Environment
 4th MODPROD 2010 Chair of Construction Machines and Conveying Technology Using Modelica for Interactive Simulations of Technical Systems in a Virtual Reality Environment J. Frenkel C. Schubert Prof. Dr.-Ing.
4th MODPROD 2010 Chair of Construction Machines and Conveying Technology Using Modelica for Interactive Simulations of Technical Systems in a Virtual Reality Environment J. Frenkel C. Schubert Prof. Dr.-Ing.
2.007 Design and Manufacturing I Spring 2009
 MIT OpenCourseWare http://ocw.mit.edu 2.007 Design and Manufacturing I Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.007 Design and Manufacturing
MIT OpenCourseWare http://ocw.mit.edu 2.007 Design and Manufacturing I Spring 2009 For information about citing these materials or our Terms of Use, visit: http://ocw.mit.edu/terms. 2.007 Design and Manufacturing
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method
 Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
Methodology to Determine Counterweights for Passive Balancing of a 3-R Orientation Sensing Mechanism using Hanging Method Shasa A. Antao, Vishnu S. Nair and Rajeevlochana G. Chittawadigi Department of
Thomas Bräunl EMBEDDED ROBOTICS. Mobile Robot Design and Applications with Embedded Systems. Second Edition. With 233 Figures and 24 Tables.
 Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Thomas Bräunl EMBEDDED ROBOTICS Mobile Robot Design and Applications with Embedded Systems Second Edition With 233 Figures and 24 Tables Springer CONTENTS PART I: EMBEDDED SYSTEMS 1 Robots and Controllers
Master Class: Diseño de Sistemas Mecatrónicos
 Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
Master Class: Diseño de Sistemas Mecatrónicos Luis López 2015 The MathWorks, Inc. 1 Key Points Create intuitive models that all teams can share Requirements 1. Mechanical System Simulate system in one
AC : DEVELOPMENT OF A ROBOTIC PLATFORM FOR TEACH- ING MODEL-BASED DESIGN TECHNIQUES IN DYNAMICS AND CON- TROL PROGRAM
 AC 011-714: DEVELOPMENT OF A ROBOTIC PLATFORM FOR TEACH- ING MODEL-BASED DESIGN TECHNIQUES IN DYNAMICS AND CON- TROL PROGRAM Bingen Yang, University o Southern Caliornia Dr. Bingen Yang is Proessor o Aerospace
AC 011-714: DEVELOPMENT OF A ROBOTIC PLATFORM FOR TEACH- ING MODEL-BASED DESIGN TECHNIQUES IN DYNAMICS AND CON- TROL PROGRAM Bingen Yang, University o Southern Caliornia Dr. Bingen Yang is Proessor o Aerospace
Humanoid whole-body motion control with multiple contacts. Francesco Nori Robotics, Brain and Cognitive Sciences
 Humanoid whole-body motion control with multiple contacts Francesco Nori Robotics, Brain and Cognitive Sciences Robot-Environment interaction 19/11/14 2 The goal 19/11/14 3 Dynamics 19/11/14 4 Dynamics
Humanoid whole-body motion control with multiple contacts Francesco Nori Robotics, Brain and Cognitive Sciences Robot-Environment interaction 19/11/14 2 The goal 19/11/14 3 Dynamics 19/11/14 4 Dynamics
Formation Control of Crazyflies
 Formation Control of Crazyflies Bryce Mack, Chris Noe, and Trevor Rice Advisors: Dr. Ahn, Dr. Wang November 30, 2017 1 Table of Contents 1. 2. 3. Introduction Problem Statement Research Tasks I. II. III.
Formation Control of Crazyflies Bryce Mack, Chris Noe, and Trevor Rice Advisors: Dr. Ahn, Dr. Wang November 30, 2017 1 Table of Contents 1. 2. 3. Introduction Problem Statement Research Tasks I. II. III.
Exam in DD2426 Robotics and Autonomous Systems
 Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Exam in DD2426 Robotics and Autonomous Systems Lecturer: Patric Jensfelt KTH, March 16, 2010, 9-12 No aids are allowed on the exam, i.e. no notes, no books, no calculators, etc. You need a minimum of 20
Dynamic modelling of multi-physical domain system by bond graph approach and its control using flatness based controller with MATLAB Simulink
 Dnamic modlling of multi-phsical domain sstm b bond graph approach and its control using flatnss basd controllr with MATLAB Simulink Sauma Ranjan Sahoo Rsarch Scholar Robotics Lab Dr. Shital S. Chiddarwar
Dnamic modlling of multi-phsical domain sstm b bond graph approach and its control using flatnss basd controllr with MATLAB Simulink Sauma Ranjan Sahoo Rsarch Scholar Robotics Lab Dr. Shital S. Chiddarwar
WEC-Sim Training Course
 1 Program Name or Ancillary Text eere.energy.gov FOSWEC wave tank testing and WEC-Sim simulation WEC-Sim Training Course for users and developers August 17, 2017 Yi-Hsiang Yu (NREL) Kelley Ruehl (Sandia)
1 Program Name or Ancillary Text eere.energy.gov FOSWEC wave tank testing and WEC-Sim simulation WEC-Sim Training Course for users and developers August 17, 2017 Yi-Hsiang Yu (NREL) Kelley Ruehl (Sandia)
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3
 Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
Unit 2: Locomotion Kinematics of Wheeled Robots: Part 3 Computer Science 4766/6778 Department of Computer Science Memorial University of Newfoundland January 28, 2014 COMP 4766/6778 (MUN) Kinematics of
TRAJECTORY PLANNING OF FIVE DOF MANIPULATOR: DYNAMIC FEED FORWARD CONTROLLER OVER COMPUTED TORQUE CONTROLLER
 59 Military Technical College Kobry El-Kobbah, Cairo, Egypt. 7 th International Conference on Applied Mechanics and Mechanical Engineering. TRAJECTORY PLANNING OF FIVE DOF MANIPULATOR: DYNAMIC FEED FORWARD
59 Military Technical College Kobry El-Kobbah, Cairo, Egypt. 7 th International Conference on Applied Mechanics and Mechanical Engineering. TRAJECTORY PLANNING OF FIVE DOF MANIPULATOR: DYNAMIC FEED FORWARD
FABRICATION OF A 5 D.O.F ROBOT ARM CONTROLLED BY HAPTIC TECHNOLOGY
 FABRICATION OF A 5 D.O.F ROBOT ARM CONTROLLED BY HAPTIC TECHNOLOGY 1 NITHIN RAJAN, 2 V.MANOJ KUMAR 1 Graduate Student, 2 Ass. Professor SRM University E-mail: Nitz.719@gmail.com, vmanojkumar19@gmail Abstract-
FABRICATION OF A 5 D.O.F ROBOT ARM CONTROLLED BY HAPTIC TECHNOLOGY 1 NITHIN RAJAN, 2 V.MANOJ KUMAR 1 Graduate Student, 2 Ass. Professor SRM University E-mail: Nitz.719@gmail.com, vmanojkumar19@gmail Abstract-
2.1 Introduction. 2.2 Degree of Freedom DOF of a rigid body
 Chapter 2 Kinematics 2.1 Introduction 2.2 Degree of Freedom 2.2.1 DOF of a rigid body In order to control and guide the mechanisms to move as we desired, we need to set proper constraints. In order to
Chapter 2 Kinematics 2.1 Introduction 2.2 Degree of Freedom 2.2.1 DOF of a rigid body In order to control and guide the mechanisms to move as we desired, we need to set proper constraints. In order to
EE-565-Lab2. Dr. Ahmad Kamal Nasir
 EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
EE-565-Lab2 Introduction to Simulation Environment Dr. Ahmad Kamal Nasir 29.01.2016 Dr. -Ing. Ahmad Kamal Nasir 1 Today s Objectives Introduction to Gazebo Building a robot model in Gazebo Populating robot
Prof. Fanny Ficuciello Robotics for Bioengineering Visual Servoing
 Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
Visual servoing vision allows a robotic system to obtain geometrical and qualitative information on the surrounding environment high level control motion planning (look-and-move visual grasping) low level
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G.
 VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
VIBRATION ISOLATION USING A MULTI-AXIS ROBOTIC PLATFORM G. Satheesh Kumar, Y. G. Srinivasa and T. Nagarajan Precision Engineering and Instrumentation Laboratory Department of Mechanical Engineering Indian
Modeling and Simulation of Electromechanical Systems
 Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Modeling and Simulation of Electromechanical Systems Dhirendra Singh dhirendra.singh@mathworks.in Application Engineer Vivek Raju Application Engineer 2015 The MathWorks, Inc. 1 Challenges Working with
Maintaining static stability and continuous motion in rough terrain hexapod locomotion without terrain mapping*
 24th Mediterranean Conference on Control and Automation (MED) June 21-24, 2016, Athens, Greece Maintaining static stability and continuous motion in rough terrain hexapod locomotion without terrain mapping*
24th Mediterranean Conference on Control and Automation (MED) June 21-24, 2016, Athens, Greece Maintaining static stability and continuous motion in rough terrain hexapod locomotion without terrain mapping*
Developing a Robot Model using System-Level Design
 Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Developing a Robot Model using System-Level Design What was once the stuff of dreams, being secretly developed in high-security government labs for applications in defense and space exploration, is now
Physical Modeling of Multi-Domain System
 1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
1 Physical Modeling of Multi-Domain System 김종헌차장 Senior Application Engineer MathWorks Korea 2016 The MathWorks, Inc. 2 Agenda What is Physical Modeling? Why use Simscape? Landing Gear Modeling Landing
Robot Motion Planning
 Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Robot Motion Planning slides by Jan Faigl Department of Computer Science and Engineering Faculty of Electrical Engineering, Czech Technical University in Prague lecture A4M36PAH - Planning and Games Dpt.
Properties of Hyper-Redundant Manipulators
 Properties of Hyper-Redundant Manipulators A hyper-redundant manipulator has unconventional features such as the ability to enter a narrow space while avoiding obstacles. Thus, it is suitable for applications:
Properties of Hyper-Redundant Manipulators A hyper-redundant manipulator has unconventional features such as the ability to enter a narrow space while avoiding obstacles. Thus, it is suitable for applications:
MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS
 Journal of Engineering Studies and Research Volume 16 (2010) No. 4 20 MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS LAPUSAN CIPRIAN *, MATIES VISTRIAN, BALAN RADU, HANCU OLIMPIU Technical
Journal of Engineering Studies and Research Volume 16 (2010) No. 4 20 MODELING AND SIMULATION METHODS FOR DESIGNING MECHATRONIC SYSTEMS LAPUSAN CIPRIAN *, MATIES VISTRIAN, BALAN RADU, HANCU OLIMPIU Technical
Adaptive Control of 4-DoF Robot manipulator
 Adaptive Control of 4-DoF Robot manipulator Pavel Mironchyk p.mironchyk@yahoo.com arxiv:151.55v1 [cs.sy] Jan 15 Abstract In experimental robotics, researchers may face uncertainties in parameters of a
Adaptive Control of 4-DoF Robot manipulator Pavel Mironchyk p.mironchyk@yahoo.com arxiv:151.55v1 [cs.sy] Jan 15 Abstract In experimental robotics, researchers may face uncertainties in parameters of a
BEST2015 Autonomous Mobile Robots Lecture 2: Mobile Robot Kinematics and Control
 BEST2015 Autonomous Mobile Robots Lecture 2: Mobile Robot Kinematics and Control Renaud Ronsse renaud.ronsse@uclouvain.be École polytechnique de Louvain, UCLouvain July 2015 1 Introduction Mobile robot
BEST2015 Autonomous Mobile Robots Lecture 2: Mobile Robot Kinematics and Control Renaud Ronsse renaud.ronsse@uclouvain.be École polytechnique de Louvain, UCLouvain July 2015 1 Introduction Mobile robot
Simulation-Based Design of Robotic Systems
 Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Simulation-Based Design of Robotic Systems Shadi Mohammad Munshi* & Erik Van Voorthuysen School of Mechanical and Manufacturing Engineering, The University of New South Wales, Sydney, NSW 2052 shadimunshi@hotmail.com,
Autonomous Mobile Robot Design
 Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
Autonomous Mobile Robot Design Topic: EKF-based SLAM Dr. Kostas Alexis (CSE) These slides have partially relied on the course of C. Stachniss, Robot Mapping - WS 2013/14 Autonomous Robot Challenges Where
MEM380 Applied Autonomous Robots Winter Robot Kinematics
 MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
MEM38 Applied Autonomous obots Winter obot Kinematics Coordinate Transformations Motivation Ultimatel, we are interested in the motion of the robot with respect to a global or inertial navigation frame
Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators
 Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators Arya B. Changela 1, Dr. Ramdevsinh Jhala 2, Chirag P. Kalariya 3 Keyur P. Hirpara 4 Assistant Professor, Department of Mechanical
Rigid Dynamics Solution Methodology for 3-PSU Parallel Kinematic Manipulators Arya B. Changela 1, Dr. Ramdevsinh Jhala 2, Chirag P. Kalariya 3 Keyur P. Hirpara 4 Assistant Professor, Department of Mechanical
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble
 Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
Dynamics Analysis for a 3-PRS Spatial Parallel Manipulator-Wearable Haptic Thimble Masoud Moeini, University of Hamburg, Oct 216 [Wearable Haptic Thimble,A Developing Guide and Tutorial,Francesco Chinello]
MBS MODELLING WITH SIMMECHANICS: CASE STUDIES IN RESEARCH AND EDUCATION
 MBS MODELLING WITH SIMMECHANICS: CASE STUDIES IN RESEARCH AND EDUCATION Grepl, R., Lee, B., Singule, V., Švejda, P., Vlachý, D., Zezula, P. Laboratory of mechatronics, FME, Brno University of Technology
MBS MODELLING WITH SIMMECHANICS: CASE STUDIES IN RESEARCH AND EDUCATION Grepl, R., Lee, B., Singule, V., Švejda, P., Vlachý, D., Zezula, P. Laboratory of mechatronics, FME, Brno University of Technology
Chapter 4 Dynamics. Part Constrained Kinematics and Dynamics. Mobile Robotics - Prof Alonzo Kelly, CMU RI
 Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Chapter 4 Dynamics Part 2 4.3 Constrained Kinematics and Dynamics 1 Outline 4.3 Constrained Kinematics and Dynamics 4.3.1 Constraints of Disallowed Direction 4.3.2 Constraints of Rolling without Slipping
Parallel Robots. Mechanics and Control H AMID D. TAG HI RAD. CRC Press. Taylor & Francis Group. Taylor & Francis Croup, Boca Raton London NewYoric
 Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Parallel Robots Mechanics and Control H AMID D TAG HI RAD CRC Press Taylor & Francis Group Boca Raton London NewYoric CRC Press Is an Imprint of the Taylor & Francis Croup, an informs business Contents
Final Exam Practice Fall Semester, 2012
 COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
COS 495 - Autonomous Robot Navigation Final Exam Practice Fall Semester, 2012 Duration: Total Marks: 70 Closed Book 2 hours Start Time: End Time: By signing this exam, I agree to the honor code Name: Signature:
A Simple Introduction to Omni Roller Robots (3rd April 2015)
") A Simple Introduction to Omni Roller Robots (3rd April 2015) Omni wheels have rollers all the way round the tread so they can slip laterally as well as drive in the direction of a regular wheel. The three-wheeled
A Simple Introduction to Omni Roller Robots (3rd April 2015) Omni wheels have rollers all the way round the tread so they can slip laterally as well as drive in the direction of a regular wheel. The three-wheeled
2007 Maplesoft, a division of Waterloo Maple Inc.
 The Maplesoft Product Line Introduction to Maple 11 It takes a lot to impress most jaded software reviewers, especially with a product that we first reviewed in 1989. But we were totally blown away by
The Maplesoft Product Line Introduction to Maple 11 It takes a lot to impress most jaded software reviewers, especially with a product that we first reviewed in 1989. But we were totally blown away by
Chapter 3: Kinematics Locomotion. Ross Hatton and Howie Choset
 Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Chapter 3: Kinematics Locomotion Ross Hatton and Howie Choset 1 (Fully/Under)Actuated Fully Actuated Control all of the DOFs of the system Controlling the joint angles completely specifies the configuration
Omnidirectional Drive Systems Kinematics and Control
 Omnidirectional Drive Systems Kinematics and Control Presented by: Andy Baker President, AndyMark, Inc., FRC 45 Ian Mackenzie Master s Student, Univ. of Waterloo, FRC 1114 2008 FIRST Robotics Conference
Omnidirectional Drive Systems Kinematics and Control Presented by: Andy Baker President, AndyMark, Inc., FRC 45 Ian Mackenzie Master s Student, Univ. of Waterloo, FRC 1114 2008 FIRST Robotics Conference
There is no need to submit any report and you just need to finish the three tutorials as well as the example.
 The first three tutorials are selected from the MATLAB/Simulink help. The fourth example is a simple SimMechanics example which can help you learn the SimMechanics more. You can find more detailed information
The first three tutorials are selected from the MATLAB/Simulink help. The fourth example is a simple SimMechanics example which can help you learn the SimMechanics more. You can find more detailed information
ROS-based Control of a Manipulator Arm for Balancing a Ball on a Plate
 Paper ID #18862 ROS-based Control of a Manipulator Arm for Balancing a Ball on a Plate Mr. Khasim Ali Khan Dr. Ji-Chul Ryu, Northern Illinois University Dr. Ji-Chul Ryu received the B.S. and M.S. degrees
Paper ID #18862 ROS-based Control of a Manipulator Arm for Balancing a Ball on a Plate Mr. Khasim Ali Khan Dr. Ji-Chul Ryu, Northern Illinois University Dr. Ji-Chul Ryu received the B.S. and M.S. degrees
A General Framework for Mobile Robot Pose Tracking and Multi Sensors Self-Calibration
 A General Framework for Mobile Robot Pose Tracking and Multi Sensors Self-Calibration Davide Cucci, Matteo Matteucci {cucci, matteucci}@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria,
A General Framework for Mobile Robot Pose Tracking and Multi Sensors Self-Calibration Davide Cucci, Matteo Matteucci {cucci, matteucci}@elet.polimi.it Dipartimento di Elettronica, Informazione e Bioingegneria,
Gesture Recognition Aplication based on Dynamic Time Warping (DTW) FOR Omni-Wheel Mobile Robot
 FOR Omni-Wheel Mobile Robot") Gesture Recognition Aplication based on Dynamic Time Warping (DTW) FOR Omni-Wheel Mobile Robot Indra Adji Sulistijono, Gama Indra Kristianto Indra Adji Sulistijono is with the Department of Mechatronics
Gesture Recognition Aplication based on Dynamic Time Warping (DTW) FOR Omni-Wheel Mobile Robot Indra Adji Sulistijono, Gama Indra Kristianto Indra Adji Sulistijono is with the Department of Mechatronics
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS
 MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
MECHATRONICS SYSTEM ENGINEERING FOR CAE/CAD, MOTION CONTROL AND DESIGN OF VANE ACTUATORS FOR WATER ROBOT APPLICATIONS Finn CONRAD and Francesco ROLI Department of Mechanical Engineering, Technical University
DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT
 U.P.B. Sci. Bull., Series D, Vol. 73, Iss. 2, 211 ISSN 1454-2358 DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT Dan VERDEŞ 1, Mircea COMAN 2, Radu DONCA 3, Radu BĂLAN 4 Aceasta lucrare
U.P.B. Sci. Bull., Series D, Vol. 73, Iss. 2, 211 ISSN 1454-2358 DESIGN, SIMULATION AND CONTROL OF ISOGLIDE T3R1 PARALLEL ROBOT Dan VERDEŞ 1, Mircea COMAN 2, Radu DONCA 3, Radu BĂLAN 4 Aceasta lucrare
Centre for Autonomous Systems
 Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
Robot Henrik I Centre for Autonomous Systems Kungl Tekniska Högskolan hic@kth.se 27th April 2005 Outline 1 duction 2 Kinematic and Constraints 3 Mobile Robot 4 Mobile Robot 5 Beyond Basic 6 Kinematic 7
What Is SimMechanics?
 SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
SimMechanics 1 simulink What Is Simulink? Simulink is a tool for simulating dynamic systems with a graphical interface specially developed for this purpose. Physical Modeling runs within the Simulink environment
Lecture 1 Wheeled Mobile Robots (WMRs)
") Lecture 1 Wheeled Mobile Robots (WMRs) Course Chair: Prof. M. De Cecco Teaching: A. Cesarini Mechatronics Department, University of Trento Email: andrea.cesarini@unitn.it http://www.miro.ing.unitn.it/
Lecture 1 Wheeled Mobile Robots (WMRs) Course Chair: Prof. M. De Cecco Teaching: A. Cesarini Mechatronics Department, University of Trento Email: andrea.cesarini@unitn.it http://www.miro.ing.unitn.it/
Simulink Based Robot Arm Control Workstation. Figure 1-1 High Level Block Diagram
 Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
Introduction: This project consists of designing a software-based control workstation in the Simulink environment using the SimMechanics Toolbox. The Quanser robot arm system will be modeled using this
A Co-simulation Approach Based on ADAMS-MATLAB for Development of an Industrial Manipulator
 ISSN 2395-1621 A Co-simulation Approach Based on ADAMS-MATLAB for Development of an Industrial Manipulator #1 SwapnilDokhe, #2 ShaileshPimpale, 1 swapnildokhe@gmail.com 2 shailesh_pimpale@rediffmail.com
ISSN 2395-1621 A Co-simulation Approach Based on ADAMS-MATLAB for Development of an Industrial Manipulator #1 SwapnilDokhe, #2 ShaileshPimpale, 1 swapnildokhe@gmail.com 2 shailesh_pimpale@rediffmail.com
Prototyping a Three-link Robot Manipulator
 Prototyping a Three-link Robot Manipulator Tarek M Sobh, Mohamed Dekhil, Thomas C Henderson, and Anil Sabbavarapu Department of Computer Science and Engineering University of Bridgeport Bridgeport, CT
Prototyping a Three-link Robot Manipulator Tarek M Sobh, Mohamed Dekhil, Thomas C Henderson, and Anil Sabbavarapu Department of Computer Science and Engineering University of Bridgeport Bridgeport, CT
Team Description Paper Team AutonOHM
 Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Team Description Paper Team AutonOHM Jon Martin, Daniel Ammon, Helmut Engelhardt, Tobias Fink, Tobias Scholz, and Marco Masannek University of Applied Science Nueremberg Georg-Simon-Ohm, Kesslerplatz 12,
Spring 2010: Lecture 9. Ashutosh Saxena. Ashutosh Saxena
 CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS 4758/6758: Robot Learning Spring 2010: Lecture 9 Why planning and control? Video Typical Architecture Planning 0.1 Hz Control 50 Hz Does it apply to all robots and all scenarios? Previous Lecture: Potential
CS283: Robotics Fall 2016: Sensors
 CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
CS283: Robotics Fall 2016: Sensors Sören Schwertfeger / 师泽仁 ShanghaiTech University Robotics ShanghaiTech University - SIST - 23.09.2016 2 REVIEW TRANSFORMS Robotics ShanghaiTech University - SIST - 23.09.2016
Controlling the Motion of a Planar 3-DOF Manipulator Using PID Controllers
 Controlling the Motion of a Planar -DOF Manipulator Using PID Controllers Thien Van NGUYEN*,1, Dan N. DUMITRIU 1,, Ion STROE 1 *Corresponding author *,1 POLITEHNICA University of Bucharest, Department
Controlling the Motion of a Planar -DOF Manipulator Using PID Controllers Thien Van NGUYEN*,1, Dan N. DUMITRIU 1,, Ion STROE 1 *Corresponding author *,1 POLITEHNICA University of Bucharest, Department