3D Shape Modeling by Deformable Models. Ye Duan
|
|
|
- Milton Warren
- 5 years ago
- Views:
Transcription
1 3D Shape Modeling by Deformable Models Ye Duan
2 Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing.
3 Vertebral Dataset
4 Vertebral Model

5 Model Refinement


6 Two Tori Tori



7 Two Tori Tori




8 Sharp Features


9 Sharp Features


10 Sharp Features



11 Sharp Features
12 Previous Work Shape Reconstruction from 3D data. Volumetric image datasets. Unorganized point clouds. Interactive Mesh Editing.
13 Interactive Mesh Editing CSG Operations. Mesh Warping. Sketch Based Editing. i
14 CSG Operations
15 CSG Operations

16 CSG Operations


17 CSG Operations

18 CSG Operations


19 Mesh Warping


20 Free hand Sketching
21 Free hand Sketching

22 Mannequin
23 Mannequin
24 Bunny
25 Bunny




26 Bunny Adaptively Refined Shape

27 Eight Tori
28 Eight Tori
29 Current Work Shape reconstruction from segmented volumetric data Shape reconstruction from MRI volumetric data Shape reconstruction from single view 2D images Shape reconstruction from multiple view 2D images
30 A Region Growing Based Iso Surface Extraction Algorithm




31 Result




32 Result
33 Result
34 Result
35 Result
36 Result
37 Result
38 Result

39 Result Comparison Our algorithm Marching Cubes algorithm

40 Results Comparison Marching Cubes algorithm Our algorithm

41 Results Comparison Our algorithm Marching Cubes algorithm
42 Current Work Shape reconstruction from segmented volumetric data Shape reconstruction from MRI volumetric data Shape reconstruction from single view 2D images Shape reconstruction from multiple view 2D images
43 A Semi-automatic 3D Brain Structure Segmentation Algorithm from MRI Integrates region-based method with boundary based method. Combines PDE-based level-set surface evolution with affinitybased clustering method. Clustering provides a good initializationiti and avoids locall minima. More efficient computation, closer to equilibrium, faster convergence.


44 Algorithm Pipeline




45
46 Deformation Initialized with seed cluster. Deform the seed by implicit PDE-based level-set method. Initialize the voxel grid by labeling each voxel as inside or outside of the seed. Build signed distance field from the binary voxel grid by fast sweeping method.




47 Deformation



48 3D Image Segmentation Results

49 3D Shape Analysis Top: right ventricle Bottom: left ventricle p=0 p>=0.05 left: average ventricle shapes of two groups overlaid; middle: significance map of raw p-values; right: significance map of p-values after FDR correction
50 Current Work Shape reconstruction from segmented volumetric data Shape reconstruction from MRI volumetric data Shape reconstruction from single view 2D images Shape reconstruction from multiple view 2D images
51 Color Photometric Stereo for Albedo and dshape Reconstruction ti
52 Experiment: Rebel400 & Penguin Captured images: Incandescent light of ~3000 K No saturations l 1 =(10.7,6.2,30) l 2 = (-10.7,6.2,30) l 3 = (0,-12.4,30) (cm) Albedos c r c g c b








53 Experiment: Penguin Comparison of reconstructed shapes Roland PIX-4 (measured) Rebel400 Coolpix950








54 Experiment: CP950 & Penguin Reconstructed object from the shape and albedo
55 Experiment: Rebel400 & Horse Captured images: Incandescent light of ~3000 K No saturations l 1 =(11,6.1,30) l 2 = (-11,5.8,30) l 3 = (0,-13.7,30) (cm) Albedos c r c g c b
56 Experiment: Rebel400 & Horse (w r,w g,w b )=(1,0,0) (0,1,0) (0,0,1) (w r,w g,w b )=(1, 1, 1) (E{i r }, E{i g }, E{i b }) =(1.26, 1, 0.77) albedo








57 Experiment: Rebel400 & Horse Reconstructed object from the shape and albedo







58 Experiment: Rebel400 & Horse
59 Outline Shape reconstruction from segmented volumetric data Shape reconstruction from MRI volumetric data Shape reconstruction from single view 2D images Shape reconstruction from multiple view 2D images


60 Multiple View 2D Images
61 Buddha







62 Progressive Reconstruction



63 Mug




64 Middlebury Benchmark datasets








65 Reconstruction Results on the 4 Benchmark datasets
66 Running time and reconstruction accuracy Dataset Running time (mins: secs) # of input images accuracy Temple Ring 33: % Temple Sparse Ring 29: % Dino Ring 36: % Dino Sparse Ring 32: %




67 3D Building Reconstruction Using Multi-view Aerial Images










68 Feature extraction and matching
69 Camera Pose Rectification






70 Preliminary Results


71 Building Reconstruction Using Multi-view Aerial Images
72 LIDAR point data processing Classification Segmentation Compression Surface reconstruction
73 LIDAR point data processing Ground based LIDAR Airborne LIDAR




74 Ground basedlidar Scan


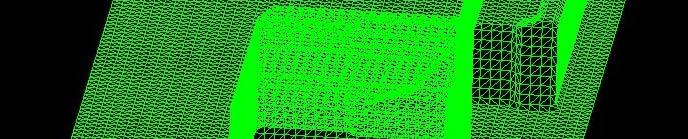
, ceiling")

 identified;")

75 Hierarchical LIDAR Data Segmentation (a) (b) (c) (a) Original LIDAR data; (b) Floor (blue color), ceiling (green color), and vertical walls (red, cyan and magenta colors) identified; (c) Individual objects extracted (shown in different colors).






76 3D Interior Building Visualization Three different views of the same scene



77 Virtual Navigation
78 Floor Plan Generation
79 Airborne LIDAR point data
80

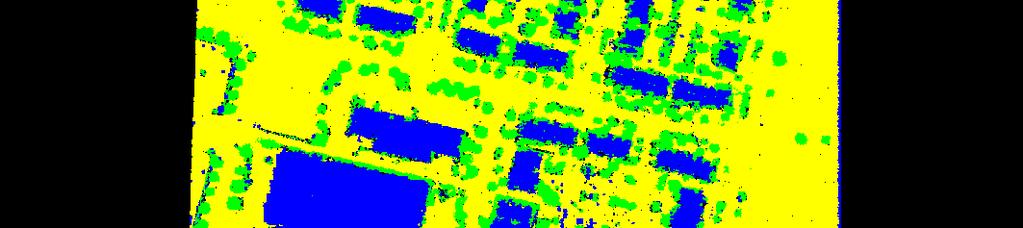



81 Classification Results
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Multi-View 3D-Reconstruction Cedric Cagniart Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 Problem Statement Given several calibrated views of an object... can we automatically
Geometric Modeling. Bing-Yu Chen National Taiwan University The University of Tokyo
 Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Geometric Modeling Bing-Yu Chen National Taiwan University The University of Tokyo What are 3D Objects? 3D Object Representations What are 3D objects? The Graphics Process 3D Object Representations Raw
Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning
 Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Allan Zelener Dissertation Proposal December 12 th 2016 Object Localization, Segmentation, Classification, and Pose Estimation in 3D Images using Deep Learning Overview 1. Introduction to 3D Object Identification
Camera Drones Lecture 3 3D data generation
 Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
Camera Drones Lecture 3 3D data generation Ass.Prof. Friedrich Fraundorfer WS 2017 Outline SfM introduction SfM concept Feature matching Camera pose estimation Bundle adjustment Dense matching Data products
A Volumetric Method for Building Complex Models from Range Images
 A Volumetric Method for Building Complex Models from Range Images 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of
A Volumetric Method for Building Complex Models from Range Images 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of
Geometric Representations. Stelian Coros
 Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
Geometric Representations Stelian Coros Geometric Representations Languages for describing shape Boundary representations Polygonal meshes Subdivision surfaces Implicit surfaces Volumetric models Parametric
3D Object Representation. Michael Kazhdan ( /657)
") 3D Object Representation Michael Kazhdan (601.457/657) 3D Objects How can this object be represented in a computer? 3D Objects This one? H&B Figure 10.46 3D Objects This one? H&B Figure 9.9 3D Objects
3D Object Representation Michael Kazhdan (601.457/657) 3D Objects How can this object be represented in a computer? 3D Objects This one? H&B Figure 10.46 3D Objects This one? H&B Figure 9.9 3D Objects
A Volumetric Method for Building Complex Models from Range Images
 A Volumetric Method for Building Complex Models from Range Images Brian Curless Marc Levoy Computer Graphics Laboratory Stanford University Introduction Goal Given a set of aligned, dense range images,
A Volumetric Method for Building Complex Models from Range Images Brian Curless Marc Levoy Computer Graphics Laboratory Stanford University Introduction Goal Given a set of aligned, dense range images,
Complex Models from Range Images. A Volumetric Method for Building. Brian Curless. Marc Levoy. Computer Graphics Laboratory. Stanford University
 A Volumetric Method for Building Complex Models from Range Images Computer Graphics Laboratory Stanford University Brian Curless Marc Levoy Introduction Goal Given a set of aligned, dense range images,
A Volumetric Method for Building Complex Models from Range Images Computer Graphics Laboratory Stanford University Brian Curless Marc Levoy Introduction Goal Given a set of aligned, dense range images,
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting
 Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Intrinsic3D: High-Quality 3D Reconstruction by Joint Appearance and Geometry Optimization with Spatially-Varying Lighting R. Maier 1,2, K. Kim 1, D. Cremers 2, J. Kautz 1, M. Nießner 2,3 Fusion Ours 1
Special Topics in Visualization
 Special Topics in Visualization Final Project Report Dual contouring of Hermite Data Submitted By S M Shahed Nejhum 8589-1199 May 19, 2008 Introduction Iso-surface extraction from 3D volumetric data is
Special Topics in Visualization Final Project Report Dual contouring of Hermite Data Submitted By S M Shahed Nejhum 8589-1199 May 19, 2008 Introduction Iso-surface extraction from 3D volumetric data is
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces.
 weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
weighted minimal surface model for surface reconstruction from scattered points, curves, and/or pieces of surfaces. joint work with (S. Osher, R. Fedkiw and M. Kang) Desired properties for surface reconstruction:
Large Scale 3D Reconstruction (50 mins) Yasutaka Washington University in St. Louis
 Yasutaka Washington University in St. Louis") Large Scale 3D Reconstruction (50 mins) Yasutaka Furukawa @ Washington University in St. Louis Outline 1. Large scale MVS for organized photos (Aerial photos) 2. Large scale MVS for unorganized photos
Large Scale 3D Reconstruction (50 mins) Yasutaka Furukawa @ Washington University in St. Louis Outline 1. Large scale MVS for organized photos (Aerial photos) 2. Large scale MVS for unorganized photos
Multi-View 3D-Reconstruction
 Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Multi-View 3D-Reconstruction Slobodan Ilic Computer Aided Medical Procedures (CAMP) Technische Universität München, Germany 1 3D Models Digital copy of real object Allows us to - Inspect details of object
Outline of Presentation. Introduction to Overwatch Geospatial Software Feature Analyst and LIDAR Analyst Software
 Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Outline of Presentation Automated Feature Extraction from Terrestrial and Airborne LIDAR Presented By: Stuart Blundell Overwatch Geospatial - VLS Ops Co-Author: David W. Opitz Overwatch Geospatial - VLS
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images
 Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
Supplementary Material: Piecewise Planar and Compact Floorplan Reconstruction from Images Ricardo Cabral Carnegie Mellon University rscabral@cmu.edu Yasutaka Furukawa Washington University in St. Louis
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR
 3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
3D Convolutional Neural Networks for Landing Zone Detection from LiDAR Daniel Mataruna and Sebastian Scherer Presented by: Sabin Kafle Outline Introduction Preliminaries Approach Volumetric Density Mapping
Subpixel accurate refinement of disparity maps using stereo correspondences
 Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Subpixel accurate refinement of disparity maps using stereo correspondences Matthias Demant Lehrstuhl für Mustererkennung, Universität Freiburg Outline 1 Introduction and Overview 2 Refining the Cost Volume
Computer Graphics 1. Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2011
: 3D Modeling. LMU München Medieninformatik Andreas Butz Computergraphik 1 SS2011") Computer Graphics 1 Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons in
Computer Graphics 1 Chapter 2 (May 19th, 2011, 2-4pm): 3D Modeling 1 The 3D rendering pipeline (our version for this class) 3D models in model coordinates 3D models in world coordinates 2D Polygons in
APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM
 APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM To speed up the closest-point distance computation, 3D Euclidean Distance Transform (DT) can be used in the proposed method. A DT is a uniform discretization
APPENDIX: DETAILS ABOUT THE DISTANCE TRANSFORM To speed up the closest-point distance computation, 3D Euclidean Distance Transform (DT) can be used in the proposed method. A DT is a uniform discretization
3D object recognition used by team robotto
 3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
3D object recognition used by team robotto Workshop Juliane Hoebel February 1, 2016 Faculty of Computer Science, Otto-von-Guericke University Magdeburg Content 1. Introduction 2. Depth sensor 3. 3D object
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 12 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Structured light 3D reconstruction
 Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Structured light 3D reconstruction Reconstruction pipeline and industrial applications rodola@dsi.unive.it 11/05/2010 3D Reconstruction 3D reconstruction is the process of capturing the shape and appearance
Implicit Surfaces & Solid Representations COS 426
 Implicit Surfaces & Solid Representations COS 426 3D Object Representations Desirable properties of an object representation Easy to acquire Accurate Concise Intuitive editing Efficient editing Efficient
Implicit Surfaces & Solid Representations COS 426 3D Object Representations Desirable properties of an object representation Easy to acquire Accurate Concise Intuitive editing Efficient editing Efficient
3D Reconstruction from Multi-View Stereo: Implementation Verification via Oculus Virtual Reality
 3D Reconstruction from Multi-View Stereo: Implementation Verification via Oculus Virtual Reality Andrew Moran MIT, Class of 2014 andrewmo@mit.edu Ben Eysenbach MIT, Class of 2017 bce@mit.edu Abstract We
3D Reconstruction from Multi-View Stereo: Implementation Verification via Oculus Virtual Reality Andrew Moran MIT, Class of 2014 andrewmo@mit.edu Ben Eysenbach MIT, Class of 2017 bce@mit.edu Abstract We
Multi-view stereo. Many slides adapted from S. Seitz
 Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Multi-view stereo Many slides adapted from S. Seitz Beyond two-view stereo The third eye can be used for verification Multiple-baseline stereo Pick a reference image, and slide the corresponding window
Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos
 Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler
Supplementary Material for A Multi-View Stereo Benchmark with High-Resolution Images and Multi-Camera Videos Thomas Schöps 1 Johannes L. Schönberger 1 Silvano Galliani 2 Torsten Sattler 1 Konrad Schindler
AUTOMATIC EXTRACTION OF LARGE COMPLEX BUILDINGS USING LIDAR DATA AND DIGITAL MAPS
 AUTOMATIC EXTRACTION OF LARGE COMPLEX BUILDINGS USING LIDAR DATA AND DIGITAL MAPS Jihye Park a, Impyeong Lee a, *, Yunsoo Choi a, Young Jin Lee b a Dept. of Geoinformatics, The University of Seoul, 90
AUTOMATIC EXTRACTION OF LARGE COMPLEX BUILDINGS USING LIDAR DATA AND DIGITAL MAPS Jihye Park a, Impyeong Lee a, *, Yunsoo Choi a, Young Jin Lee b a Dept. of Geoinformatics, The University of Seoul, 90
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Wide baseline matching (SIFT) Today: dense 3D reconstruction
3D Reconstruction with Tango. Ivan Dryanovski, Google Inc.
 3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
3D Reconstruction with Tango Ivan Dryanovski, Google Inc. Contents Problem statement and motivation The Tango SDK 3D reconstruction - data structures & algorithms Applications Developer tools Problem formulation
Introduction to Mobile Robotics Techniques for 3D Mapping
 Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Introduction to Mobile Robotics Techniques for 3D Mapping Wolfram Burgard, Michael Ruhnke, Bastian Steder 1 Why 3D Representations Robots live in the 3D world. 2D maps have been applied successfully for
Unwrapping of Urban Surface Models
 Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Unwrapping of Urban Surface Models Generation of virtual city models using laser altimetry and 2D GIS Abstract In this paper we present an approach for the geometric reconstruction of urban areas. It is
Monocular Tracking and Reconstruction in Non-Rigid Environments
 Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Monocular Tracking and Reconstruction in Non-Rigid Environments Kick-Off Presentation, M.Sc. Thesis Supervisors: Federico Tombari, Ph.D; Benjamin Busam, M.Sc. Patrick Ruhkamp 13.01.2017 Introduction Motivation:
Dense 3D Reconstruction. Christiano Gava
 Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Dense 3D Reconstruction Christiano Gava christiano.gava@dfki.de Outline Previous lecture: structure and motion II Structure and motion loop Triangulation Today: dense 3D reconstruction The matching problem
Chapter 1. Multi-View Surface Reconstruction by Quasi-Dense Wide Baseline Matching
 Chapter 1 Multi-View Surface Reconstruction by Quasi-Dense Wide Baseline Matching Juho Kannala, Markus Ylimäki, Pekka Koskenkorva, and Sami S. Brandt Machine Vision Group Computer Science and Engineering
Chapter 1 Multi-View Surface Reconstruction by Quasi-Dense Wide Baseline Matching Juho Kannala, Markus Ylimäki, Pekka Koskenkorva, and Sami S. Brandt Machine Vision Group Computer Science and Engineering
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS
 AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
AUTOMATED 3D MODELING OF URBAN ENVIRONMENTS Ioannis Stamos Department of Computer Science Hunter College, City University of New York 695 Park Avenue, New York NY 10065 istamos@hunter.cuny.edu http://www.cs.hunter.cuny.edu/
Silhouette Extraction with Random Pattern Backgrounds for the Volume Intersection Method
 Silhouette Extraction with Random Pattern Backgrounds for the Volume Intersection Method Masahiro Toyoura Graduate School of Informatics Kyoto University Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic
Silhouette Extraction with Random Pattern Backgrounds for the Volume Intersection Method Masahiro Toyoura Graduate School of Informatics Kyoto University Masaaki Iiyama Koh Kakusho Michihiko Minoh Academic
3D Modeling I. CG08b Lior Shapira Lecture 8. Based on: Thomas Funkhouser,Princeton University. Thomas Funkhouser 2000
 3D Modeling I CG08b Lior Shapira Lecture 8 Based on: Thomas Funkhouser,Princeton University Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
3D Modeling I CG08b Lior Shapira Lecture 8 Based on: Thomas Funkhouser,Princeton University Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
Registration of Deformable Objects
 Registration of Deformable Objects Christopher DeCoro Includes content from: Consistent Mesh Parameterizations, Praun et. al, Siggraph 2001 The Space of Human Body Shapes, Allen et. al, Siggraph 2003 Shape-based
Registration of Deformable Objects Christopher DeCoro Includes content from: Consistent Mesh Parameterizations, Praun et. al, Siggraph 2001 The Space of Human Body Shapes, Allen et. al, Siggraph 2003 Shape-based
Level Set Models for Computer Graphics
 Level Set Models for Computer Graphics David E. Breen Department of Computer Science Drexel University Ross T. Whitaker School of Computing University of Utah Ken Museth Department of Science and Technology
Level Set Models for Computer Graphics David E. Breen Department of Computer Science Drexel University Ross T. Whitaker School of Computing University of Utah Ken Museth Department of Science and Technology
Introduction to Computer Graphics. Modeling (3) April 27, 2017 Kenshi Takayama
 April 27, 2017 Kenshi Takayama") Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
Introduction to Computer Graphics Modeling (3) April 27, 2017 Kenshi Takayama Solid modeling 2 Solid models Thin shapes represented by single polygons Unorientable Clear definition of inside & outside
PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO
 Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Stefan Krauß, Juliane Hüttl SE, SoSe 2011, HU-Berlin PERFORMANCE CAPTURE FROM SPARSE MULTI-VIEW VIDEO 1 Uses of Motion/Performance Capture movies games, virtual environments biomechanics, sports science,
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Cadastre - Preliminary Results
 Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Automated Extraction of Buildings from Aerial LiDAR Point Cloud and Digital Imaging Datasets for 3D Pankaj Kumar 1*, Alias Abdul Rahman 1 and Gurcan Buyuksalih 2 ¹Department of Geoinformation Universiti
Overview of 3D Object Representations
 Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 597D, Fall 2003 3D Object Representations What makes a good 3D object representation? Stanford and Hearn & Baker 1 3D Object
Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 597D, Fall 2003 3D Object Representations What makes a good 3D object representation? Stanford and Hearn & Baker 1 3D Object
CRF Based Point Cloud Segmentation Jonathan Nation
 CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
CRF Based Point Cloud Segmentation Jonathan Nation jsnation@stanford.edu 1. INTRODUCTION The goal of the project is to use the recently proposed fully connected conditional random field (CRF) model to
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 15 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Project Updates Short lecture Volumetric Modeling +2 papers
 Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Volumetric Modeling Schedule (tentative) Feb 20 Feb 27 Mar 5 Introduction Lecture: Geometry, Camera Model, Calibration Lecture: Features, Tracking/Matching Mar 12 Mar 19 Mar 26 Apr 2 Apr 9 Apr 16 Apr 23
Automatic Building Extrusion from a TIN model Using LiDAR and Ordnance Survey Landline Data
 Automatic Building Extrusion from a TIN model Using LiDAR and Ordnance Survey Landline Data Rebecca O.C. Tse, Maciej Dakowicz, Christopher Gold and Dave Kidner University of Glamorgan, Treforest, Mid Glamorgan,
Automatic Building Extrusion from a TIN model Using LiDAR and Ordnance Survey Landline Data Rebecca O.C. Tse, Maciej Dakowicz, Christopher Gold and Dave Kidner University of Glamorgan, Treforest, Mid Glamorgan,
Cell Decomposition for Building Model Generation at Different Scales
 Cell Decomposition for Building Model Generation at Different Scales Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry Universität Stuttgart Germany forename.lastname@ifp.uni-stuttgart.de
Cell Decomposition for Building Model Generation at Different Scales Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry Universität Stuttgart Germany forename.lastname@ifp.uni-stuttgart.de
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements
 Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Planetary Rover Absolute Localization by Combining Visual Odometry with Orbital Image Measurements M. Lourakis and E. Hourdakis Institute of Computer Science Foundation for Research and Technology Hellas
Multi-view Stereo. Ivo Boyadzhiev CS7670: September 13, 2011
 Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Multi-view Stereo Ivo Boyadzhiev CS7670: September 13, 2011 What is stereo vision? Generic problem formulation: given several images of the same object or scene, compute a representation of its 3D shape
Depth from Stereo. Dominic Cheng February 7, 2018
 Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Depth from Stereo Dominic Cheng February 7, 2018 Agenda 1. Introduction to stereo 2. Efficient Deep Learning for Stereo Matching (W. Luo, A. Schwing, and R. Urtasun. In CVPR 2016.) 3. Cascade Residual
Watertight Planar Surface Reconstruction of Voxel Data
 Watertight Planar Surface Reconstruction of Voxel Data Eric Turner CS 284 Final Project Report December 13, 2012 1. Introduction There are many scenarios where a 3D shape is represented by a voxel occupancy
Watertight Planar Surface Reconstruction of Voxel Data Eric Turner CS 284 Final Project Report December 13, 2012 1. Introduction There are many scenarios where a 3D shape is represented by a voxel occupancy
3D Object Representations. COS 526, Fall 2016 Princeton University
 3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
3D Object Representations COS 526, Fall 2016 Princeton University 3D Object Representations How do we... Represent 3D objects in a computer? Acquire computer representations of 3D objects? Manipulate computer
Geometric Reconstruction Dense reconstruction of scene geometry
 Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Lecture 5. Dense Reconstruction and Tracking with Real-Time Applications Part 2: Geometric Reconstruction Dr Richard Newcombe and Dr Steven Lovegrove Slide content developed from: [Newcombe, Dense Visual
Capturing Reality with Point Clouds: Applications, Challenges and Solutions
 Capturing Reality with Point Clouds: Applications, Challenges and Solutions Rico Richter 1 st February 2017 Oracle Spatial Summit at BIWA 2017 Hasso Plattner Institute Point Cloud Analytics and Visualization
Capturing Reality with Point Clouds: Applications, Challenges and Solutions Rico Richter 1 st February 2017 Oracle Spatial Summit at BIWA 2017 Hasso Plattner Institute Point Cloud Analytics and Visualization
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS
 A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
A DATA DRIVEN METHOD FOR FLAT ROOF BUILDING RECONSTRUCTION FROM LiDAR POINT CLOUDS A. Mahphood, H. Arefi *, School of Surveying and Geospatial Engineering, College of Engineering, University of Tehran,
VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES JORDAN HALSEY // VR PLAYHOUSE
 VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES JORDAN HALSEY // VR PLAYHOUSE VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES Pro: Highly realistic seated
VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES JORDAN HALSEY // VR PLAYHOUSE VOLUMETRIC VIDEO // PLENOPTIC LIGHTFIELD // MULTI CAMERA METHODOLOGIES Pro: Highly realistic seated
 DEM DSM DTM DT GIS MAT OGC TIN VD ,, (, ) (, ). (, ) 180 160 140 2D grid 3D grid 3D pointcloud 3D TIN/2D TIN required storage (GB) 120 100 80 60 40 20 0 0 5 10 15 20 25 resolution (points/m)
DEM DSM DTM DT GIS MAT OGC TIN VD ,, (, ) (, ). (, ) 180 160 140 2D grid 3D grid 3D pointcloud 3D TIN/2D TIN required storage (GB) 120 100 80 60 40 20 0 0 5 10 15 20 25 resolution (points/m)
Surface Modeling. Polygon Tables. Types: Generating models: Polygon Surfaces. Polygon surfaces Curved surfaces Volumes. Interactive Procedural
 Surface Modeling Types: Polygon surfaces Curved surfaces Volumes Generating models: Interactive Procedural Polygon Tables We specify a polygon surface with a set of vertex coordinates and associated attribute
Surface Modeling Types: Polygon surfaces Curved surfaces Volumes Generating models: Interactive Procedural Polygon Tables We specify a polygon surface with a set of vertex coordinates and associated attribute
CELL DECOMPOSITION FOR THE GENERATION OF BUILDING MODELS AT MULTIPLE SCALES
 CELL DECOMPOSITION FOR THE GENERATION OF BUILDING MODELS AT MULTIPLE SCALES Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry, Universitaet Stuttgart Geschwister-Scholl-Str. 24D,
CELL DECOMPOSITION FOR THE GENERATION OF BUILDING MODELS AT MULTIPLE SCALES Norbert Haala, Susanne Becker, Martin Kada Institute for Photogrammetry, Universitaet Stuttgart Geschwister-Scholl-Str. 24D,
Processing 3D Surface Data
 Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Processing 3D Surface Data Computer Animation and Visualisation Lecture 17 Institute for Perception, Action & Behaviour School of Informatics 3D Surfaces 1 3D surface data... where from? Iso-surfacing
Scalar Algorithms: Contouring
 Scalar Algorithms: Contouring Computer Animation and Visualisation Lecture tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Last Lecture...
Scalar Algorithms: Contouring Computer Animation and Visualisation Lecture tkomura@inf.ed.ac.uk Institute for Perception, Action & Behaviour School of Informatics Contouring Scaler Data Last Lecture...
3D Photography: Stereo Matching
 3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
3D Photography: Stereo Matching Kevin Köser, Marc Pollefeys Spring 2012 http://cvg.ethz.ch/teaching/2012spring/3dphoto/ Stereo & Multi-View Stereo Tsukuba dataset http://cat.middlebury.edu/stereo/ Stereo
03 - Reconstruction. Acknowledgements: Olga Sorkine-Hornung. CSCI-GA Geometric Modeling - Spring 17 - Daniele Panozzo
 3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
3 - Reconstruction Acknowledgements: Olga Sorkine-Hornung Geometry Acquisition Pipeline Scanning: results in range images Registration: bring all range images to one coordinate system Stitching/ reconstruction:
Lecture 10 Dense 3D Reconstruction
 Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Institute of Informatics Institute of Neuroinformatics Lecture 10 Dense 3D Reconstruction Davide Scaramuzza 1 REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time M. Pizzoli, C. Forster,
Overview of 3D Object Representations
 Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 426, Fall 2000 Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
Overview of 3D Object Representations Thomas Funkhouser Princeton University C0S 426, Fall 2000 Course Syllabus I. Image processing II. Rendering III. Modeling IV. Animation Image Processing (Rusty Coleman,
3D Modeling techniques
 3D Modeling techniques 0. Reconstruction From real data (not covered) 1. Procedural modeling Automatic modeling of a self-similar objects or scenes 2. Interactive modeling Provide tools to computer artists
3D Modeling techniques 0. Reconstruction From real data (not covered) 1. Procedural modeling Automatic modeling of a self-similar objects or scenes 2. Interactive modeling Provide tools to computer artists
Data Acquisition, Leica Scan Station 2, Park Avenue and 70 th Street, NY
 Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Automated registration of 3D-range with 2D-color images: an overview 44 th Annual Conference on Information Sciences and Systems Invited Session: 3D Data Acquisition and Analysis March 19 th 2010 Ioannis
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey
 Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Presented at the FIG Congress 2018, May 6-11, 2018 in Istanbul, Turkey Evangelos MALTEZOS, Charalabos IOANNIDIS, Anastasios DOULAMIS and Nikolaos DOULAMIS Laboratory of Photogrammetry, School of Rural
Supplementary Material. Multi-view Non-rigid Refinement and Normal Selection for High Quality 3D Reconstruction
 Supplementary Material Multi-view Non-rigid Refinement and Normal Selection for High Quality 3D Reconstruction Sk. Mohammadul Haque, Venu Madhav Govindu Indian Institute of Science Bengaluru, India {smhaque,
Supplementary Material Multi-view Non-rigid Refinement and Normal Selection for High Quality 3D Reconstruction Sk. Mohammadul Haque, Venu Madhav Govindu Indian Institute of Science Bengaluru, India {smhaque,
Methods for Automatically Modeling and Representing As-built Building Information Models
 NSF GRANT # CMMI-0856558 NSF PROGRAM NAME: Automating the Creation of As-built Building Information Models Methods for Automatically Modeling and Representing As-built Building Information Models Daniel
NSF GRANT # CMMI-0856558 NSF PROGRAM NAME: Automating the Creation of As-built Building Information Models Methods for Automatically Modeling and Representing As-built Building Information Models Daniel
A consumer level 3D object scanning device using Kinect for web-based C2C business
 A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
A consumer level 3D object scanning device using Kinect for web-based C2C business Geoffrey Poon, Yu Yin Yeung and Wai-Man Pang Caritas Institute of Higher Education Introduction Internet shopping is popular
Making Machines See. Roberto Cipolla Department of Engineering. Research team
 Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Making Machines See Roberto Cipolla Department of Engineering Research team http://www.eng.cam.ac.uk/~cipolla/people.html Cognitive Systems Engineering Cognitive Systems Engineering Introduction Making
Lecture overview. Visualisatie BMT. Fundamental algorithms. Visualization pipeline. Structural classification - 1. Structural classification - 2
 Visualisatie BMT Fundamental algorithms Arjan Kok a.j.f.kok@tue.nl Lecture overview Classification of algorithms Scalar algorithms Vector algorithms Tensor algorithms Modeling algorithms 1 2 Visualization
Visualisatie BMT Fundamental algorithms Arjan Kok a.j.f.kok@tue.nl Lecture overview Classification of algorithms Scalar algorithms Vector algorithms Tensor algorithms Modeling algorithms 1 2 Visualization
Efficient Large-Scale Stereo Matching
 Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Efficient Large-Scale Stereo Matching Andreas Geiger*, Martin Roser* and Raquel Urtasun** *KARLSRUHE INSTITUTE OF TECHNOLOGY **TOYOTA TECHNOLOGICAL INSTITUTE AT CHICAGO KIT University of the State of Baden-Wuerttemberg
Deep Models for 3D Reconstruction
 Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Deep Models for 3D Reconstruction Andreas Geiger Autonomous Vision Group, MPI for Intelligent Systems, Tübingen Computer Vision and Geometry Group, ETH Zürich October 12, 2017 Max Planck Institute for
Computer Science Applications to Cultural Heritage. 3D Reconstruction
 Computer Science Applications to Cultural Heritage 3D Reconstruction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic
Computer Science Applications to Cultural Heritage 3D Reconstruction Filippo Bergamasco (filippo.bergamasco@unive.it) http://www.dais.unive.it/~bergamasco DAIS, Ca Foscari University of Venice Academic
Solid Modeling. Michael Kazhdan ( /657) HB , FvDFH 12.1, 12.2, 12.6, 12.7 Marching Cubes, Lorensen et al.
 HB , FvDFH 12.1, 12.2, 12.6, 12.7 Marching Cubes, Lorensen et al.") Solid Modeling Michael Kazhdan (601.457/657) HB 10.15 10.17, 10.22 FvDFH 12.1, 12.2, 12.6, 12.7 Marching Cubes, Lorensen et al. 1987 Announcement OpenGL review session: When: Today @ 9:00 PM Where: Malone
Solid Modeling Michael Kazhdan (601.457/657) HB 10.15 10.17, 10.22 FvDFH 12.1, 12.2, 12.6, 12.7 Marching Cubes, Lorensen et al. 1987 Announcement OpenGL review session: When: Today @ 9:00 PM Where: Malone
Multiple View Geometry
 Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Multiple View Geometry Martin Quinn with a lot of slides stolen from Steve Seitz and Jianbo Shi 15-463: Computational Photography Alexei Efros, CMU, Fall 2007 Our Goal The Plenoptic Function P(θ,φ,λ,t,V
Contours & Implicit Modelling 4
 Brief Recap Contouring & Implicit Modelling Contouring Implicit Functions Visualisation Lecture 8 lecture 6 Marching Cubes lecture 3 visualisation of a Quadric toby.breckon@ed.ac.uk Computer Vision Lab.
Brief Recap Contouring & Implicit Modelling Contouring Implicit Functions Visualisation Lecture 8 lecture 6 Marching Cubes lecture 3 visualisation of a Quadric toby.breckon@ed.ac.uk Computer Vision Lab.
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018
 Qixing Huang August 29 th 2018") CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
CS 395T Numerical Optimization for Graphics and AI (3D Vision) Qixing Huang August 29 th 2018 3D Vision Understanding geometric relations between images and the 3D world between images Obtaining 3D information
An Automatic Method for Adjustment of a Camera Calibration Room
 An Automatic Method for Adjustment of a Camera Calibration Room Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Theory, algorithms, implementation, and two advanced applications.
An Automatic Method for Adjustment of a Camera Calibration Room Presented at the FIG Working Week 2017, May 29 - June 2, 2017 in Helsinki, Finland Theory, algorithms, implementation, and two advanced applications.
Surface Reconstruction from Unorganized Points
 Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Survey of Methods in Computer Graphics: Surface Reconstruction from Unorganized Points H. Hoppe, T. DeRose, T. Duchamp, J. McDonald, W. Stuetzle SIGGRAPH 1992. Article and Additional Material at: http://research.microsoft.com/en-us/um/people/hoppe/proj/recon/
Contours & Implicit Modelling 1
 Contouring & Implicit Modelling Visualisation Lecture 8 Institute for Perception, Action & Behaviour School of Informatics Contours & Implicit Modelling 1 Brief Recap Contouring Implicit Functions lecture
Contouring & Implicit Modelling Visualisation Lecture 8 Institute for Perception, Action & Behaviour School of Informatics Contours & Implicit Modelling 1 Brief Recap Contouring Implicit Functions lecture
Learning from 3D Data
 Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Learning from 3D Data Thomas Funkhouser Princeton University* * On sabbatical at Stanford and Google Disclaimer: I am talking about the work of these people Shuran Song Andy Zeng Fisher Yu Yinda Zhang
Volumetric Scene Reconstruction from Multiple Views
 Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Volumetric Scene Reconstruction from Multiple Views Chuck Dyer University of Wisconsin dyer@cs cs.wisc.edu www.cs cs.wisc.edu/~dyer Image-Based Scene Reconstruction Goal Automatic construction of photo-realistic
Outline. Reconstruction of 3D Meshes from Point Clouds. Motivation. Problem Statement. Applications. Challenges
 Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Reconstruction of 3D Meshes from Point Clouds Ming Zhang Patrick Min cs598b, Geometric Modeling for Computer Graphics Feb. 17, 2000 Outline - problem statement - motivation - applications - challenges
Programmable Shaders for Deformation Rendering
 Programmable Shaders for Deformation Rendering Carlos D. Correa, Deborah Silver Rutgers, The State University of New Jersey Motivation We present a different way of obtaining mesh deformation. Not a modeling,
Programmable Shaders for Deformation Rendering Carlos D. Correa, Deborah Silver Rutgers, The State University of New Jersey Motivation We present a different way of obtaining mesh deformation. Not a modeling,
Graphical Models for Computer Vision
 Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Graphical Models for Computer Vision Pedro F Felzenszwalb Brown University Joint work with Dan Huttenlocher, Joshua Schwartz, Ross Girshick, David McAllester, Deva Ramanan, Allie Shapiro, John Oberlin
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection
 Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Inline Computational Imaging: Single Sensor Technology for Simultaneous 2D/3D High Definition Inline Inspection Svorad Štolc et al. svorad.stolc@ait.ac.at AIT Austrian Institute of Technology GmbH Center
Volume Rendering. Lecture 21
 Volume Rendering Lecture 21 Acknowledgements These slides are collected from many sources. A particularly valuable source is the IEEE Visualization conference tutorials. Sources from: Roger Crawfis, Klaus
Volume Rendering Lecture 21 Acknowledgements These slides are collected from many sources. A particularly valuable source is the IEEE Visualization conference tutorials. Sources from: Roger Crawfis, Klaus
Integration of Emerging Inspection Devices with Rapid Manufacturing Systems
 1 Integration of Emerging Inspection Devices with Rapid Manufacturing Systems Anath Fischer CAD & Life Cycle Engineering Faculty of Mechanical Engineering Technion - Israel Institute of Technology, Haifa,
1 Integration of Emerging Inspection Devices with Rapid Manufacturing Systems Anath Fischer CAD & Life Cycle Engineering Faculty of Mechanical Engineering Technion - Israel Institute of Technology, Haifa,
CHAPTER 2. Morphometry on rodent brains. A.E.H. Scheenstra J. Dijkstra L. van der Weerd
 CHAPTER 2 Morphometry on rodent brains A.E.H. Scheenstra J. Dijkstra L. van der Weerd This chapter was adapted from: Volumetry and other quantitative measurements to assess the rodent brain, In vivo NMR
CHAPTER 2 Morphometry on rodent brains A.E.H. Scheenstra J. Dijkstra L. van der Weerd This chapter was adapted from: Volumetry and other quantitative measurements to assess the rodent brain, In vivo NMR
Odysseas Skartsis ENGN2340. Project LEFM Convergence Study 12/11/13
 Odysseas Skartsis ENGN2340 Project LEFM Convergence Study 2//3 Thanks to Tianyang Zhang, Davide Grazioli, and Ruike Zhao for their helpful tips on using ABAQUS. Structure of this report Main body: Appendix:
Odysseas Skartsis ENGN2340 Project LEFM Convergence Study 2//3 Thanks to Tianyang Zhang, Davide Grazioli, and Ruike Zhao for their helpful tips on using ABAQUS. Structure of this report Main body: Appendix:
The Ball-Pivoting Algorithm for Surface Reconstruction
 The Ball-Pivoting Algorithm for Surface Reconstruction 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of results?
The Ball-Pivoting Algorithm for Surface Reconstruction 1. Briefly summarize the paper s contributions. Does it address a new problem? Does it present a new approach? Does it show new types of results?
AUTOMATED RECONSTRUCTION OF WALLS FROM AIRBORNE LIDAR DATA FOR COMPLETE 3D BUILDING MODELLING
 AUTOMATED RECONSTRUCTION OF WALLS FROM AIRBORNE LIDAR DATA FOR COMPLETE 3D BUILDING MODELLING Yuxiang He*, Chunsun Zhang, Mohammad Awrangjeb, Clive S. Fraser Cooperative Research Centre for Spatial Information,
AUTOMATED RECONSTRUCTION OF WALLS FROM AIRBORNE LIDAR DATA FOR COMPLETE 3D BUILDING MODELLING Yuxiang He*, Chunsun Zhang, Mohammad Awrangjeb, Clive S. Fraser Cooperative Research Centre for Spatial Information,
Level of Details in Computer Rendering
 Level of Details in Computer Rendering Ariel Shamir Overview 1. Photo realism vs. Non photo realism (NPR) 2. Objects representations 3. Level of details Photo Realism Vs. Non Pixar Demonstrations Sketching,
Level of Details in Computer Rendering Ariel Shamir Overview 1. Photo realism vs. Non photo realism (NPR) 2. Objects representations 3. Level of details Photo Realism Vs. Non Pixar Demonstrations Sketching,
Image Based Reconstruction II
 Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Image Based Reconstruction II Qixing Huang Feb. 2 th 2017 Slide Credit: Yasutaka Furukawa Image-Based Geometry Reconstruction Pipeline Last Lecture: Multi-View SFM Multi-View SFM This Lecture: Multi-View
Talk plan. 3d model. Applications: cultural heritage 5/9/ d shape reconstruction from photographs: a Multi-View Stereo approach
 Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google
Talk plan 3d shape reconstruction from photographs: a Multi-View Stereo approach Introduction Multi-View Stereo pipeline Carlos Hernández George Vogiatzis Yasutaka Furukawa Google Aston University Google